EPSON cclink通讯
CC-LINK总线光纤中继器用户手册
CC-LINK 总线光纤中继器YFK1/YFK2概述:YFK 系列产品是易控达科技专门为CC-LINK 现场总线远距离数据通讯而设计的工业级光纤通讯中继产品。
通过将该总线的电缆通讯转换为光纤通讯,实现了总线段间的信号光电隔离、完全隔离了总线段之间的电气干扰;同时具有总线信号再生、延长传输距离、增加节点数以及改变组网拓扑结构的功能。
YFK1系列支持一路电缆数据接口,一路光纤数据接口,适用于点对点通讯结构;YFK2系列支持一路电缆数据接口,两路光纤数据接口,适用于链型(可级联传输更远距离)、星型拓扑结构。
YFK1和YFK2可混合组网为更复杂的网络拓扑结构。
该产品具有易控达独创的总线故障智能切断功能,当某总线段出现故障时,不会影响另外总线段。
该系列产品采用易控达独创的专有技术,数据全透明传输,自动切换数据方向,无须任何设置,支持CC-LINK 全部总线速率,速率自适应,解决了高速率远距离传输问题,多模光纤可传输2KM,单模光纤可传输20KM。
该产品可靠的完成了通过光纤传输总线数据,继承并保留了CC-LINK 总线的全部优点,实现了高速率远距离传输、电气及地线隔离、降低干扰等性能,该设备解决了电磁干扰、地环干扰和雷电破坏的难题,同时还具有如下优点:工业设计、低功耗、隔离保护、总线故障智能切断、继电器告警输出、IP30防护等级、波浪纹铝制加强机壳、35mmDIN 导轨安装、宽电源(DC10-36V)输入、双电源冗余等优点。
特点:Ø支持CC-LINK 全部总线速率,速率自适应,数据全透明传输,极低的纳秒级信号延时;Ø多模光纤/单模光纤可选,多模可传输2KM,单模可传输20KM,ST/SC/FC 接口可选;Ø支持多种光纤网络结构:点对点、星型、链型,并可组合为更复杂的网络拓扑结构;Ø电接口采用独立电源模块供电,完全隔离了总线与设备间的地线回路;同时采用光电隔离技术,隔离内部通讯与总线数据信号,有效保护了通信设备免受电源地线回路和浪涌的干扰破坏;Ø电接口提供每线1500W 的防雷防浪涌保护、15KV 静电保护及防止共地干扰、具有自恢复过流保护功能;Ø具有独创的总线故障智能切断功能,光纤链路状态智能监测,电源监测,继电器自动报警功能;Ø丰富的LED 状态指示灯,全方位显示总线和光纤运行状态;Ø独立双电源冗余,DC10-36V 宽电源供电,DC1500V 电源隔离,具有1A 反接保护功能;Ø工业级设计,无风扇、低功耗、超强防磁场、防辐射及抗干扰功能;Ø波纹式高强度金属外壳,IP30防护等级,35mm 工业卡轨安装方式;网络拓扑结构:本系列产品支持多种光纤网络拓扑结构:点对点通讯、链型网络、星型网络等拓扑结构,并可在此基础上组网为更复杂的网络拓扑结构。
LINK系统中主站和远程IO站之间的通讯

LINK系统中主站和远程I_O站之间的通讯【论文题目】三菱CC-LINK系统中主站和远程I/O站之间的通讯本设计的内容是三菱CC-LINK系统中主站和远程I/O站之间的通讯,主要用到了三菱PLC中的A2USHCPU-S1 (CPU模块)、A1SJ61BT11 (CC-LINK模块)和A1SX42(输入模块)、A1SY41(输出模块)等。
通过安装在PC CPU底板上的主站单元(CC-LINK模块)和安装在现场设备的远程I/O站单元(CC-LINK模块)、I/O模块,可完成简单的、高速的通讯;并可节省大量的电缆、还极大地提高缚线效率。
【关键词】CC-LINK、主站、远程I/O站CC-LINK:控制与通讯链路;其性能主要有:通过分布各个模块到装置设备例如输送线和机器设备,可在整个系统布线的情况下完成;能处理开关量,例如I/O或数字量的模块,可完成简单的、高速的通讯;通过连结多台PC CPU,可以构成一个简单的分布式系统;通过连结不同制造厂商不同型号的设备,使系统更具灵活性。
主站:用于控制远程I/O站、远程装置站和本地站的站。
远程I/O站:仅仅处理开关量的站。
【设计方案】图(1)为一个简单的CC-LINK系统中主站和远程I/O站之间的通讯的图例,通过在主站和远程I/O站模块上的“站号”、“模式”、“传输速率”和“条件”设置开关上设定好所需的值,实现系统中主站和远程I/O站之间的正常通讯。
EMBED AutoCAD.Drawing.16 图(1)CC-LINK系统原理(如图(2)):主站和远程I/O站之间通讯的原理概述如下:执行刷新规定;启动数据链接;通过链接扫描,远程I/O站的输入信息被存储在主站的远程输入(RX)中;通过FROM指令,从远程输入(RX)中读出;通过TO指令,写入开/关数据到远程输出(RY)中;通过链接扫描,远程I/O站的输出信息执行开/关状态。
EMBED AutoCAD.Drawing.16 图(2)【系统设计过程】(如图(1))1.开关设置1.1 主站站号设置开关(STATION NO.)对于主站,总是设置为“0”;所以在“*10”和“*1”的旋转开关中都设为“0”。
EPSON机器人通讯连接
EPSON机器人通讯连接随着科技的飞速发展,机器人已经成为了现代社会中不可或缺的一部分。
EPSON作为一家知名的电子产品制造商,其生产的机器人也在市场上占据了一席之地。
本文将探讨EPSON机器人的通讯连接技术及其应用。
一、EPSON机器人的通讯连接方式EPSON机器人主要采用以下几种通讯连接方式:1、无线通讯EPSON机器人可以通过无线通讯方式与计算机、平板电脑或手机等设备进行连接。
这种通讯方式具有方便、灵活的特点,可以随时随地使用机器人进行工作。
无线通讯还可以通过局域网或互联网实现远程控制,使操作更加便捷。
2、串口通讯EPSON机器人还可以通过串口通讯方式与计算机进行连接。
这种方式主要使用RS-232或RS-485接口,数据传输速度较慢,但可靠性较高,适合于在需要较高稳定性的场合下使用。
3、USB通讯USB通讯是一种比较常见的通讯方式,EPSON机器人也不例外。
通过USB接口,机器人可以方便地与计算机进行连接,实现快速的数据传输。
USB接口还支持热插拔功能,使用更加方便。
二、EPSON机器人通讯连接的应用EPSON机器人的通讯连接应用广泛,主要包括以下几个方面:1、工厂自动化在工厂自动化领域,EPSON机器人的通讯连接可以实现生产线上的物料搬运、装配、检测等工作。
通过与计算机、传感器等设备的连接,可以实现生产过程的智能化和自动化,提高生产效率和产品质量。
2、物流配送物流配送领域是EPSON机器人应用的重要领域之一。
通过无线通讯和GPS定位技术,可以将机器人连接到物流系统中,实现货物的快速、准确配送。
机器人还可以在仓库管理中发挥重要作用,提高仓库管理的效率和准确性。
3、医疗护理在医疗护理领域,EPSON机器人的通讯连接可以实现病患监测、药品管理和医疗垃圾处理等工作。
机器人的精确控制和智能化诊断可以提高医疗护理的质量和效率,为患者提供更好的医疗服务。
4、公共服务在公共服务领域,EPSON机器人的通讯连接可以实现如引导、巡逻、安保等工作。
三菱Q系列PLC与FX系列PLC进行CC-Link通讯实现方法

-
RWW0RWW7 (8 点 )
-
RWW0RWWB (12 点 )
-
RWW0RWWF (16 点 )
-
在编制通讯程序前,必须要先汇总各站之间需
要通讯的数据与信号的数量。才能根据其数量通过拨
动从站 FX3U-32CCL 模块中的设置旋钮正确设定“站
数”和“站号”。根据点数列表可知,若从站 1 的“站号”
三、CC-Link 通讯的硬件组态 CC-Link 通 信 系 统 中, 一 般 选 用 三 菱 Q 系 列 PLC 作为主站,FX 系列 PLC 作为从站。以主站的 CC-Link 通讯模块选用 QJ61BT11N,从站的 CC-Link 通讯模块选用 FX3U-32CCL 进行 CC-Link 通讯为例。 (一)站号设置 主站站号设置一般为 0,备用主站为 1 到 64, 从站号为 1 到 64,如果设置了 0 到 64 之外的数值, “ERR”灯亮起。在同一个系统中,各站的站号不能
作者简介:杨德君(1983.1—),男,汉族,重庆人,助教,工学学士,研究方向:机电一体化。
· 65 ·
丝路视野
设置为相同站号。
(二)传送速率设置
主站和从站必须设置相同的传送速率。
(三)通讯模块的连线
用双绞屏蔽电缆将各站的 DA 与 DA 端子,DB
与 DB 端 子,DG 与 DG 端 子 进 行 连 接。 将每 个 站
表1?远程点数表选择站数类型远程输入远程输出读远程寄存器写远程寄存器1用户区rx00rx0f16点ry00ry0f16点rwr0rwr34点rww0rww34点系统区rx10rx1f16点ry10ry1f16点2用户区rx00rx2f48点ry00ry2f48点rwr0rwr78点rww0rww78点系统区rx30rx3f16点ry30ry3f16点3用户区rx00rx4f80点ry00ry4f80点rwr0rwrb12点rww0rwwb12点系统区rx50rx5f16点ry50ry5f16点4用户区rx00rx6f112点ry00ry6f112点rwr0rwrf16点rww0rwwf16点系统区rx70rx7f16点ry70ry7f16点在编制通讯程序前必须要先汇总各站之间需要通讯的数据与信号的数量
爱普生打印机出现通讯错误解决方法
爱普生打印机出现通讯错误解决方法爱普生打印机出现通讯错误解决方法R230提示通讯错误怎么办 R1900提示爱普生打印机出现通讯错误解决方法 R230提示通讯错误怎么办R1900提示通讯错误爱普生ME350清零软件清零QQ:18054940501、驱动程序不对,重新安装。
2、数据线传输不好或USB口不好。
更换接口试试,不行换数据线。
3、打印机接口板损坏,维修或更换。
其它问题:通讯错误,所谓通讯错误,是电脑没有找到你的打印机,电脑与打印机之间没有任何联系。
1.拔下USB线,电脑打印机两端都要拔下,几分钟后重插试试。
2.更换USB线,而不是将你的USB线在其他机器上测试。
3.将USB线换接到电脑后面的接口。
4.打印机驱动安装有问题。
卸载原驱动,重新安装。
安装驱动前,一定首先要打开打印机,让系统自动检测打印机接口,而不是人工指定。
打印机不打印,墨车不动,估计就是要清零了,你的是要清零?提示服务请求——“部件已到使用寿命”才是需要清零部分打印机清零软件型号列表如下:C94, C95, C97, C98, C99, C110, C120D68, D78, D88, D120 CX2800, CX2900, CX3100, CX3200, CX3300, CX3400, CX3500,CX3600, CX3650 CX3900, CX4100, CX4500, CX4600, CX4900, CX5700, CX5900, CX6300, CX6400, CX6500, CX6600, CX7300, CX8300,CX8400F, CX9300F, CX9400Fax, CX9500F R200, R210, R220, R230, R240, R245, R250, R260, R265, R270, R280, R285, R290, R295, R300, R310, R320,R340, R350, R360, R380, R390, R800, R1800, R1900, R2400, R2880, R3880, R4880 RX500, RX510, RX520, RX530, RX585, RX590, RX595, RX600,RX610, RX615, RX620, RX630, RX640, RX650, RX680, RX685, RX690, RX700 T10, T11, T13, T20, T21, T23, T24, T26, T27, T30, T33,T40W, T50, T59, T60, T1100, T1110 TX100, TX101, TX105, TX106, TX109, TX110, TX111, TX115, TX117, TX119, TX121, TX200, TX209, TX210, TX219, TX220,TX300, TX400, TX405, TX408, TX409, TX410, TX419, TX420, TX510,TX515, TX550, TX600, TX650, TX659, TX700, TX710, TX800, TX810, TX820FWD Artisan 50, Artisan 700, Artisan 710, Artisan 800,Artisan 810 Artisan1430NX200, NX300, NX305, NX400, NX420, NX510S20, S21, S22, SX100, SX105, SX110, SX115, SX117, SX125, SX200, SX205, SX210, SX400, SX405, SX410, SX415, SX420, SX425, SX510, SX515, SX600, SX610 P50, P60, PX610, PX650, PX659, PX700, PX710, PX800, PX810 Work Force 30, 40, 600, 610, 1100 Picture Mate PM 210, 215, 225, 235, 250, 260, 270, 280, 290, 310 L101 L201 L111 L211 L301 L303 L351 L353 L358 L551 XP801 XP800 XP600 XP605 XP700 XP750 XP850 XP101 XP402 XP30 XP33 XP202关机,拔下电源。
处理cclink通讯问题的方法分享

处理cclink通讯问题的方法分享处理cclink通讯问题的方法分享1. 引言在自动化控制系统中,CCLink是一种基于现场总线技术的通信协议,广泛应用于工业领域。
然而,在实际应用过程中,我们不可避免地会遇到CCLink通讯问题。
本文将分享一些处理CCLink通讯问题的方法,帮助读者更好地解决和预防这些问题。
2. 确定问题的性质和范围当我们面对CCLink通讯问题时,首先需要确定问题的性质和范围。
这包括但不限于以下几个方面:a. 连接问题:检查CCLink连接线路是否正确连接,并确保连接器处于良好状态。
b. 传输问题:检查CCLink网络传输是否稳定,排除相关设备故障导致的通讯问题。
c. 配置问题:检查CCLink配置文件的正确性,包括节点位置区域、速率、通讯参数等。
d. 软件问题:排查PLC程序、人机界面等软件相关问题,确保其与CCLink通讯正常。
3. 故障排除步骤针对不同的CCLink通讯问题,我们可以采取以下步骤进行故障排除:步骤一:检查硬件连接在排除硬件连接问题方面,我们可以按照以下几点进行检查:- 检查CCLink网络拓扑结构,确保所有节点连接正确、无误。
- 检查连接线和连接器,确保物理连接良好。
- 检查节点位置区域和速率配置,确保设备与CCLink网络相匹配。
步骤二:检查网络传输在排除网络传输问题方面,我们可以采取以下措施:- 使用网络分析仪等工具监测CCLink网络传输状态,检查是否存在通讯错误和丢包现象。
- 判断CCLink网络负载是否过高,如有需要,可以对网络进行优化处理。
步骤三:检查配置文件在排除配置问题方面,我们应该:- 检查CCLink节点位置区域的设置是否正确。
- 检查CCLink的速率是否与相关设备相匹配。
- 检查通讯参数的配置是否正确。
步骤四:排查软件问题在排查与软件相关的问题方面,我们可以:- 检查PLC程序是否正确、完整。
- 检查人机界面的设置是否正确。
- 检查相关软件是否升级至最新版本,并进行适当的修复或更新。
FANUC机器人CC-link通讯设定中文版

FANUC>系列R-30*A/R-30*A配对控制器CC-Link接口(从机)操作员手册B-82654EN/03安全性B-82654EN/031.安全注意事项1安全注意事项本手册包含防止伤害和财产损坏的安全预防措施。
这些预防措施根据重要性的不同,被标记为“警告”或“小心”。
在开始使用机器人之前,请仔细阅读“警告”,“注意事项”和“注意事项”。
警告不按照“警告”下的指示操作,会对使用者造成致命或严重伤害。
这些信息在一个方框中用黑体字标明,以便于与本手册的主体相区别。
谨慎如果不按照“注意”下的指示操作,可能会对使用者造成伤害或财产损失。
这些信息在一个方框中标明,以便于与本手册的主体相区别。
注“说明”项下给出的信息是补充说明,既不是警告,也不是告诫。
仔细阅读并保存本手册。
1.1工人一个机器人不能单独做任何事情。
机器人只有在配备一只手或其他装置,并与外围设备连接成系统后,才能进行操作。
不仅要考虑机器人的安全性,还要考虑整个系统的安全性。
使用机器人时,提供安全围栏等安全措施。
发那科对系统人员的定义如下所示。
检查哪个工人应该接受专门机器人课程的培训。
操作员操作员的工作包括:打开和关闭系统机器人程序的启动和停止从报警状态恢复系统操作员不得进入安全围栏围起的区域工作。
程序员或教学操作员程序员或示教操作员的工作包括操作员的工作和以下工作:机器人的教学,外围设备的调整,以及其他必须在安全栅栏所包围的区域内完成的工作程序员或教学操作员应接受专门机器人课程的培训。
维修工程师维护工程师的工作包括程序员的工作和以下工作:机器人的维修和保养维修工程师应接受专门机器人课程的培训。
-三-1.安全措施SB-82654EN/031.2一般安全注意事项本节列出一般安全防范措施。
在开始使用机器人之前,先阅读注意事项。
本手册的后续章节说明了其他注意事项。
采取每一项预防措施。
一般规则警告1 使用机器人时,应注意以下事项。
否则,机器人和周边设备会受到不利影响,或者工人会受到严重伤害。
CC_link现场总线的通讯配置方法对比总结
CC_link 现场总线的通讯配置方法对比总结CC-Link现场总线是日本三菱电机公司主推的一种基于PLC系统的现场总线,这是目前在世界现场总线市场上唯一的源于亚洲、又占有一定市场份额的现场总线。
它在实际工程中显示出强大的生命力,特别是在制造业得到广泛的应用。
在钢铁行业,CC-LINK有大量的应用,而且系统非常稳定,为机组的稳定提供了保证。
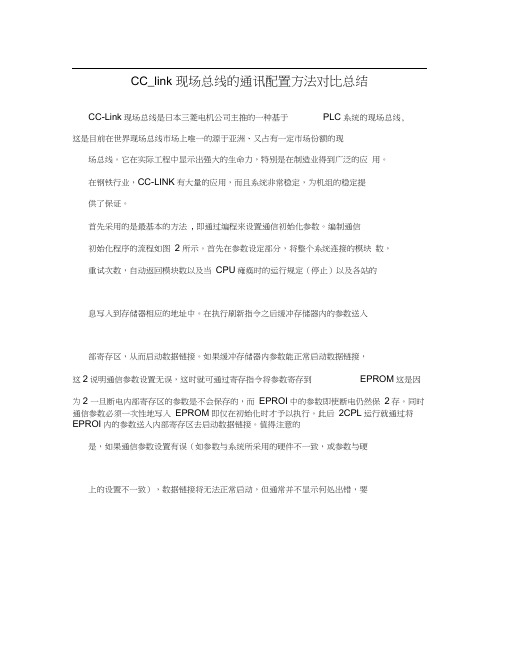
首先采用的是最基本的方法, 即通过编程来设置通信初始化参数。
编制通信初始化程序的流程如图2 所示。
首先在参数设定部分,将整个系统连接的模块数,重试次数,自动返回模块数以及当CPU瘫痪时的运行规定(停止)以及各站的息写入到存储器相应的地址中。
在执行刷新指令之后缓冲存储器内的参数送入部寄存区,从而启动数据链接。
如果缓冲存储器内参数能正常启动数据链接,这2说明通信参数设置无误,这时就可通过寄存指令将参数寄存到EPROM这是因为2 一旦断电内部寄存区的参数是不会保存的,而EPROI中的参数即使断电仍然保2存。
同时通信参数必须一次性地写入EPROM即仅在初始化时才予以执行。
此后2CPL运行就通过将EPROI内的参数送入内部寄存区去启动数据链接。
值得注意的是,如果通信参数设置有误(如参数与系统所采用的硬件不一致,或参数与硬上的设置不一致),数据链接将无法正常启动,但通常并不显示何处出错,要正只有靠自己细心而又耐心地检查,别无它法。
反过来,如果通信参数设置正而硬件上的设置有错,CC-Link通信控制组件会提供出错信息,一般可通过编软件包的诊断功能发现错误的类型和错在哪里。
刷新指令通过缓冲存储器参数启动数据链播琴数寄存到CTROM刷錨指令通过动敷据籬摟图1:编程配置步骤第二种通信初试化设置的方法是使用CC-Link通信配置的组态软件GX-Con figurator for CC-L ink该组态软件可以对A系列和QnA系列的PLC进行组态,实现通信参数的设置。
整个组态的过程十分简单,在选择好主站型号之后就可以进行主站的设置,此后再陆续添加所连接的从站,并进行从站的设置,包括从站的型号和其所占站的个数。
CCLINK主站和从站通信使用说明

CC-Link主站和从站通信使用说明南京熊猫电子装备有限公司目录2CC-Link主站和从站的参数配置........................................ 3CC-Link主从站数据发送和接收过程....................................CC-Link外部硬件连接目前,CC-Link主站使用的是三菱QJ61BT11N模块,其安装在带有CPU的主基板插槽内,可以根据需要选择槽号,如下图1-1所示。
CC-Link从站使用的是赫优讯的PCI通讯板卡,其安装在工控机PCI插槽内。
图1-1CC-Link主站模块安装位置1)CC-Link主站和从站的外部硬件接线如图1-2所示为主从站之间的接线,若有多台机器人作为从站,从站之间的接线同样可以参照此图,只需在最后一个从站连接终端电阻。
图1-2主从站的外部硬件接线2)CC-Link主站和从站外部硬件站号和波特率设置。
主站可以连接1-64个从站,每个机器人站作为远程设备站,占用4个站数,实际可以根据需要设置从站所占用的站数目(范围为:1-4)。
如下图1-3所示为站号和波特率设置过程,主站的站号设为0,从站的站号依次为1、5、9..........。
同时,主站和所有从站的波特率大小必须相同,可选择的传送速率为156kbps、625kbps、2.5Mbps、5Mbps、10Mbps。
图1-3站号和波特率设置CC-Link主站和从站的参数配置首先需要在PLC编程软件上进行参数设置,包括以下3点:1)在PLC编程软件中对PLC参数进行设置。
如下图2-1所示,在安装CC-Link模块插槽所对应的槽号上选择智能类型,该模块的点数为32点。
图2-1PLC参数设置2)对CC-Link主站进行参数设置。
如下图2-2所示,起始I/O号选择偶数位较合适,如00、20、40、60等,类型为主站,数据连接类型为主站CPU参数自动起动,模式设置为远程网络(ver.1模式),总连接台数根据实际从站数目来选择,远程输入(RX)首地址X1000,远程输出(RY)首地址Y1000,远程寄存器(RWr读数据)首地址为D1000,远程寄存器(RWw写数据)首地址为D2000,特殊继电器首地址为SB0,特殊寄存器首地址为SW0,其他设置为默认;其中RX、RY、RWr、RWw地址设置放大,目的是避免通信用途的软元件与其他软件出现干涉,影响调试。
cclink通讯异常的处理方法
cclink通讯异常的处理方法CCLink通讯异常的处理方法CCLink是一种常用的工业通讯协议,它可以实现PLC、HMI、伺服等设备之间的数据交换。
然而,在使用CCLink时,有时会遇到通讯异常的情况,这时就需要进行相应的处理。
下面将介绍CCLink通讯异常的处理方法。
一、前置检查在进行CCLink通讯异常处理之前,首先需要进行一些前置检查,以确定问题所在。
1.检查硬件连接首先要确保硬件连接正常。
检查电缆是否插好、是否松动或断开等问题。
2.检查网络设置其次要检查网络设置是否正确。
比如IP地址、子网掩码、网关等设置是否正确,以及设备的物理地址是否与网络配置相符。
3.检查设备状态还要检查设备状态。
比如PLC是否处于运行状态、HMI是否正常工作等。
二、通讯异常处理方法如果以上前置检查都没有问题,那么就需要进行具体的通讯异常处理了。
1.重新启动设备有时候只需要重新启动设备就可以解决通讯异常问题。
比如重启PLC 或HMI等设备,或者重启整个网络系统。
2.更换电缆或接口卡如果电缆或接口卡出现故障,则需要更换。
可以用新的电缆或接口卡进行测试,看是否能够解决通讯异常问题。
3.调整网络设置如果网络设置有误,则需要进行相应的调整。
比如修改IP地址、子网掩码、网关等设置,以确保设备之间的通讯正常。
4.检查程序或配置文件有时候通讯异常问题是由程序或配置文件出现错误导致的。
可以检查相关程序或配置文件,找出错误并进行修复。
5.检查其他设备如果一个设备出现了通讯异常,那么还需要检查其他设备是否正常工作。
比如PLC和HMI之间的通讯异常可能是由于伺服出现了故障导致的。
6.升级系统软件如果以上方法都无法解决通讯异常问题,那么就需要考虑升级系统软件了。
可以下载最新版本的软件进行更新,以确保系统能够正常工作。
三、总结在使用CCLink时,遇到通讯异常是很常见的情况。
为了解决这些问题,我们需要先进行前置检查,确定问题所在;然后根据具体情况采取相应的处理方法。
CCLINK主站和从站通信使用说明

CC-Link主站和从站通信南京熊猫电子装备有限公司目录2CC-Link主站和从站的参数配置3CC-Link主从站数据发送和接收过程必须相同,可选择的传送速率为 156kbps 、625kbps 、2.5Mbps 、5Mbps 、10Mbps 。
图 1-3 站号和波特率设置CC-Link 主站和从站的参数配置CC-Link 外部硬件连接目前,CC-Link 主站使用的是三菱 QJ61BT11N 莫块,其安装在带有 CPU 的主 基板插槽内,可以根据需要选择槽号,如下图 1-1 所示。
CC-Link 从站使用的是 赫优讯的PCI 通讯板卡,其安装在工控机 PCI 插槽内。
图 1-1CC-Link 主站莫块安装位置 1) CC-Link 主站和从站的外部硬件接线如图 1-2 所示为主从站之间的接线,若有多台机器人作为从站,从 站之间的接线同样可以参照此图,只需在最后一个从站连接终端电阻。
图1-2 主从站的外部硬件接线2) CC-Link 主站和从站外部硬件站号和波特率设置。
主站可以连接 1-64 个从站,每个机器人站作为远程设备站,占用 4个站数,实际可以根据需要设置从站所占用的站数目(范围为:1-4 )。
如下图 1-3 所示为站号和波特率设置过程,主站的站号设为 0, 从站的 站号依次为 1 、5、9 。
同时,主站和所有从站的波特率大小首先需要在PLC编程软件上进行参数设置,包括以下3点:1)在PLC编程软件中对PLC参数进行设置。
如下图2-1 所示,在安装CC-Link 模块插槽所对应的槽号上选择智能类型,该模块的点数为32 点。
图2-1PLC参数设置2)对CC-Link 主站进行参数设置。
如下图2-2 所示,起始I/O 号选择偶数位较合适,如00、20、40、60等,类型为主站,数据连接类型为主站CPU参数自动起动,模式设置为远程网络(ver.1 模式),总连接台数根据实际从站数目来选择,远程输入(RX首地址X1000,远程输出(RY首地址丫1000, 远程寄存器(RW读数据)首地址为D1000,远程寄存器(RWW写数据)首地址为D200Q特殊继电器首地址为SBQ特殊寄存器首地址为SW0其他设置为默认;其中RX RY RW、RWW地址设置放大,目的是避免通信用途的软元件与其他软件出现干涉,影响调试。
三菱Q系列PLC CC-Link通讯方法的实现
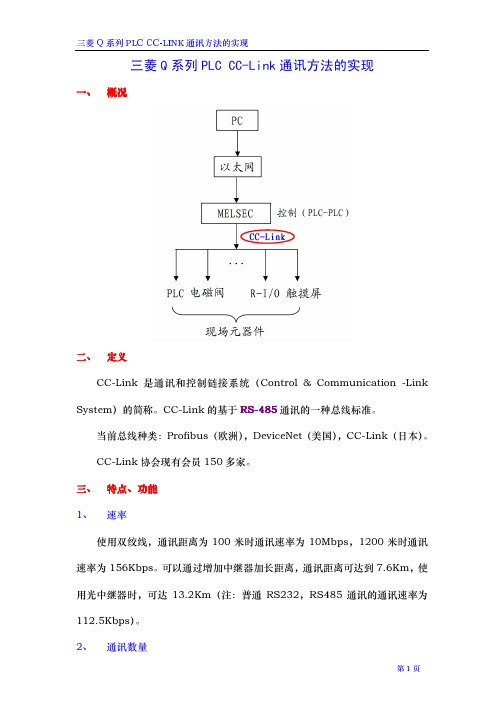
当前总线种类:Profibus(欧洲),DeviceNet(美国),CC-Link(日本)。
CC-Link 协会现有会员 150 多家。
三、 特点、功能
1、 速率
使用双绞线,通讯距离为 100 米时通讯速率为 10Mbps,1200 米时通讯
速率为 156Kbps。可以通过增加中继器加长距离,通讯距离可达到 7.6Km,使
用光中继器时,可达 13.2Km(注:普通 RS232,RS485 通讯的通讯速率为
112.5Kbps)。
2、 通讯数量
第1页
三菱 Q 系列 PLC CC-LINK 通讯方法的实现
每个 CC-Link 系统最多可处理 4096 个远程 I/O 点,其中远程输入(RX) 为 2048 个,远程输出(RY)为 2046 个。每个系统最多可处理 512 个远程寄 存器 RW(包括远程写寄存器 RWw 和远程读寄存器 RWr)。每个系统中最多链 接的站点为 64 个。
在一个系统中最多可以有 26 个智能站。 五、 CC-Link 的配置 1、 传输介质 数据传送可以用屏蔽双绞线(TP)。 线定义:DA,DB:数据线
DG:地线 SLD:屏蔽线 为提高数据传输的抗干扰能力,普通 TP 可以在 DB、DA 间接一 110Ω的电阻, 高性能 TP 在两数据线间接 330Ω的电阻。 2、 站号分配 主站为 0 号站,从站站号为 1~64。 3、 占用站 有时一个模块并不一定占有一个站号,有可能占有 2 个或 2 个以上的站号, 但最多占有 4 个站号。 五、 通讯原理 CC-Link 的通讯原理是基于数据链接和自动刷新的原理。具体如下: PLC 分别在 CC-Link 模块和 CPU 中开辟出一块内存缓冲区(BFM),其
主站为 0 号站,带有两个从站:1 号站 16 点远程输入模块和 2 号站 16 点 远程输出模块。
三菱PLC和发那科机器人进行CCLINK总线通信

三菱PLC和发那科机器人进行CCLINK总线通信展开全文三菱CCLINK主站模块采用QJ61BT11N,该模块用在Q系列PLC上,如果是5U或3UPLC,可用FX5-CNV-BUS加FX3U-16CCL-M或FX5-CCL-M模块。
本教程以Q系列为例CCLINK接线方法如下模块拨码含义如下接线和拨码设置好后,接着在编程软件上设置CCLINK通信参数打开编程软件,在工程导航栏打开参数——网络参数,选中CCLINK打开。
打开如下画面起始IO为模块本体占用IO总连接台设为从站个数,本项目采用23个从站,所以填23 远程输入/输出IO为和远程模块通信占用的PLC开始IO地址远程寄存器为和远程智能站字通信占用的PLC开始寄存器特殊寄存器为主站监控通信异常等数据的信号设置好这些参数后,点击下面的站信息,进行从站设置前面6个台号是位移传感器的站信息,第7到第12个台号为发那科机器人站,剩下的站是CCLINK远程IO站。
站类型,机器选择智能站,除了可以IO通信,还可以D寄存处数值通信。
扩展循环设置选择1倍,具体含义看说明书占用站数,智能站选择4站,一站32个点,机器人选择点数128,所以占用4个站。
保留/无效站,无效站标志该站没用或不接线,选择后模块就不会出现该站报警。
在使用的站我选择无设置。
设置好后下载入PLC。
机器人侧设置也比较简单。
打开发那科机器人CCLINK设置画面后,如下需要注意的是,站编号对应PLC设置中的站号,不是台数。
站数对应PLC中的占用站数波特率和PLC一致数值寄存器数量:和占用的站数有关,智能站一倍设置,有16进16出的数字寄存器。
数值寄存器开始索引:表示从机器人的第几个数值寄存器开始读或写,比如开始索引填17,就表示从机器人的第17个寄存器地址开始。
Q系列和发那科机器人的CCLINK通信设置就这样,PLC和远程IO或其他仪表的通信也类似。
CCLINK配置及编程方法
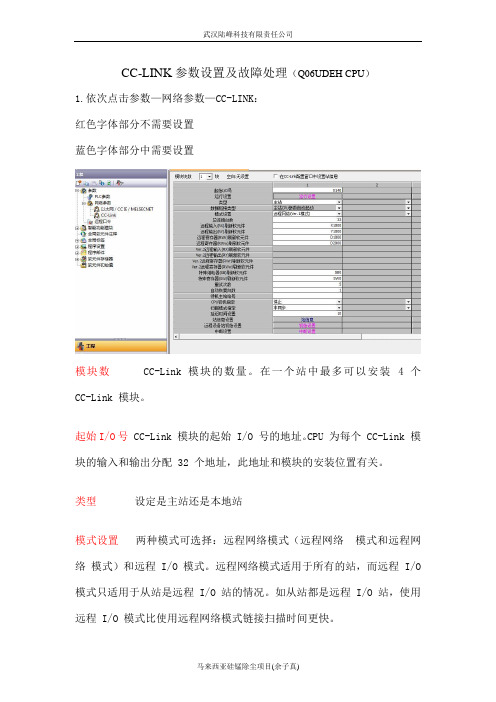
CC-LINK参数设置及故障处理(Q06UDEH CPU)1.依次点击参数—网络参数—CC-LINK:红色字体部分不需要设置蓝色字体部分中需要设置模块数 CC-Link 模块的数量。
在一个站中最多可以安装 4 个CC-Link 模块。
起始I/O号CC-Link 模块的起始 I/O 号的地址。
CPU 为每个 CC-Link 模块的输入和输出分配 32 个地址,此地址和模块的安装位置有关。
类型设定是主站还是本地站模式设置两种模式可选择:远程网络模式(远程网络模式和远程网络模式)和远程 I/O 模式。
远程网络模式适用于所有的站,而远程 I/O 模式只适用于从站是远程 I/O 站的情况。
如从站都是远程 I/O 站,使用远程 I/O 模式比使用远程网络模式链接扫描时间更快。
总链接数链接从站的物理数目,而不是站号数。
远程输入(RX)刷新软元件远程输入 RX 缓冲区(BFM)的首地址。
远程输出(RY)刷新软元件远程输出 RY 缓冲区(BFM)的首地址。
远程寄存器(RWr)刷新软元件远程读寄存器 RWr 缓冲区(BFM)的首地址。
远程寄存器(RWw)刷新软元件远程写寄存器 RWw 缓冲区(BFM)的首地址。
特殊继电器(SB)刷新软元件特殊继电器 SB 缓冲区(BFM)的首地址。
特殊寄存器(SW)刷新软元件特殊寄存器 SW 缓冲区(BFM)的首地址。
重试次数通讯失败后的重试次数。
CPU 指定 CPU 发生故障时的通讯状态(停止或继续)。
扫描模式指定指定通讯时的扫描模式。
处理信号和扫描信号同时进行时是同步模式,反之为异步模式。
2.在站信息中要设置好每个子站占用的站数(具体可参照官网手册)检查没有错误之后可下载到PLC中进行测试;下载完成后需要进行CPU和远程模块复位操作;3.重新上电可进行系统监视和CC-LINK诊断操作。
依次点击诊断—CC-LINK诊断:发现错误后,可进行线路测试操作(检查线路是否通畅);如果接线有问题,可到现场检查梳理(接线方式可查书册)。
发那科机器人CC-LINK通讯配置

CC-LINK通讯配置——作业指导书1. 定义CC-Link(Control & Communication Link)总线是日本三菱电机公司主推的一种基于PLC 系统的现场总线,其数据容量大,通信速度最高可达10Mb/s。
一般情况下,CC-LINK整个一层网络由一个主站和64个从站组成,从站可以是远程IO站、远程设备站、智能设备站和本地站。
当使用CC-LINK通讯时,机器人只能做从站。
2. 工作准备2.1 CC-LINK硬件:包括板卡、电缆、终端电阻(选用);2.2 CC-LINK软件:1A05B-2500-J786 CC-Link Interface。
3. 外部条件CC-LINK板卡已安装。
4. 所需技能简单的操作示教器、配置IO;5. 工作步骤5.1 CC-LINK硬件连接将机器人控制柜断电,把从PLC引过来的电缆整齐排布在控制柜内部,切除电缆前端外皮如下图1:图1 CCLINK电缆CC-LINK接线口见图2:SLOT 1SLOT2图2 CCLINK接线口将电缆和已插在插槽1或者2的CC-LINK连接,其中电缆的DA、DB、DG、泄电线分别和CCLINK的DA、DB、DG、SLD相连,CC-LINK的FG接控制柜内部的地,如图3,图3 CCLINK接线电缆另一端和PLC端的CC-LINK相连,接线如图:图4 PLC处CCLINK接线需要注意,当机器人或者PLC模块作为网络中的终端时,需要在DA、DB串接一终端电阻,阻值约为110-120欧姆,当机器人不是网络中的终端时,不能串接终端电阻。
终端电阻需要接在一个网络中的终端,作用是消除在通信电缆中的信号反射。
下图为一个CCLINK网络中的基本连线;图5 CCLINK网络5.2 软件设置5.2.1 设置CC-LINK通讯进入CC-LINK的设置界面如图所示:图6 CCLINK设置界面1 Error one shot:错误报警。
设置为DISABLE时,只有解除CC-LINK报警,机器人才能动作;设置为ENABLE时,CC-LINK报警时,机器人依旧动作。
发那科机器人CC-LINK通讯配置
CC-LINK通讯配置——作业指导书1. 定义CC-Link(Control & Communication Link)总线是日本三菱电机公司主推的一种基于PLC 系统的现场总线,其数据容量大,通信速度最高可达10Mb/s。
一般情况下,CC-LINK整个一层网络由一个主站和64个从站组成,从站可以是远程IO站、远程设备站、智能设备站和本地站。
当使用CC-LINK通讯时,机器人只能做从站。
2. 工作准备2.1 CC-LINK硬件:包括板卡、电缆、终端电阻(选用);2.2 CC-LINK软件:1A05B-2500-J786 CC-Link Interface。
3. 外部条件CC-LINK板卡已安装。
4. 所需技能简单的操作示教器、配置IO;5. 工作步骤5.1 CC-LINK硬件连接将机器人控制柜断电,把从PLC引过来的电缆整齐排布在控制柜内部,切除电缆前端外皮如下图1:图1 CCLINK电缆CC-LINK接线口见图2:SLOT 1SLOT2图2 CCLINK接线口将电缆和已插在插槽1或者2的CC-LINK连接,其中电缆的DA、DB、DG、泄电线分别和CCLINK的DA、DB、DG、SLD相连,CC-LINK的FG接控制柜内部的地,如图3,图3 CCLINK接线电缆另一端和PLC端的CC-LINK相连,接线如图:图4 PLC处CCLINK接线需要注意,当机器人或者PLC模块作为网络中的终端时,需要在DA、DB串接一终端电阻,阻值约为110-120欧姆,当机器人不是网络中的终端时,不能串接终端电阻。
终端电阻需要接在一个网络中的终端,作用是消除在通信电缆中的信号反射。
下图为一个CCLINK网络中的基本连线;图5 CCLINK网络5.2 软件设置5.2.1 设置CC-LINK通讯进入CC-LINK的设置界面如图所示:图6 CCLINK设置界面1 Error one shot:错误报警。
设置为DISABLE时,只有解除CC-LINK报警,机器人才能动作;设置为ENABLE时,CC-LINK报警时,机器人依旧动作。
完整word版,CC-Link 连接( 智能设备站)

CC-Link 连接( 智能设备站)
1.PLC端软件设置:
网络参数--CCLINK--站信息—选中需要设置的站,站点类型改为智能设备站,占用数量1站,如下图
2,HMI端设置:
2-1.机器连接类型设置如下图
2-2.站号设置:
点击上图中红色框内的详细设置,出现如下对话窗口
图中红色框内设置站号,蓝色框内设置占用站数,这里的设置要与PLC中的设置一致2-3,系统环境设置如下图:
2-4,OS中通讯驱动的选择:
2-5,软元件的设置(网络设置)
双击基本画面中的元素,出现属性对话窗口
点击红色框中的软元件,出现软元件设置窗口
将网络设置改为其它站点,网络号和站点号填写所对应的PLC的网络号和站号,具体设置如上图红色框部分。
epson connect 条款
epson connect 条款英文回答:Epson Connect is a service that allows users to print, scan, and share documents from anywhere using their Epson printer. In order to use this service, users must agree to the terms and conditions set forth by Epson. These terms include things like not using the service for any illegal activities, not sharing inappropriate content, and not infringing on the rights of others.For example, if I want to print a document from my phone using Epson Connect, I have to make sure that the document I am printing does not contain any copyrighted material that I do not have permission to use. This is to ensure that I am not infringing on anyone's rights by using the service.中文回答:Epson Connect 是一个允许用户从任何地方使用他们的爱普生打印机打印、扫描和分享文件的服务。
为了使用这项服务,用户必须同意爱普生制定的条款和条件。
这些条款包括不得将服务用于任何非法活动、不得分享不当内容,也不得侵犯他人的权利。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Master Device CC-Link Network Motor Driver from Company A Motor Driver from Company B fr Intelligent I/O om Company C Intelligent I/O from Company DPhoto Sensor from Company E HMI Device from Company FAnalog Device from Company G主设备CC-Link 网络A 公司的电机驱动器1.5CC-Link1.5.1CC-Link 概述CC-Link 是在控制设备(PLC 、计算机、传感器、执行器等)之间提供简单互连的现场总线网络。
CC-Link 是开发的开放式通信标准,用以连接各种现场设备(传感器、执行器、机器人控制器等)。
由于该开放式通信标准,CC-Link 的用户可利用世界各地开发的各种设备轻松构建多供应商系统。
B 公司的C 公司的电机驱动器智能I/O E 公司的光传感器G 公司的模拟设备D 公司的F 公司的智能I/O HMI 设备1.5.2CC -Link 的特点减少配线与并行配线相比,CC-Link 采用了三层屏蔽的双绞线电缆,大幅减少了必要电线的数量、配线时间和成本。
可拆卸通信连接器可实现设备(节点)间的简单配线和轻松的网络分离或重建。
快速通信通信速度为156k bps 至10M bps 。
10M bps 的速度是仅次于PROFIBUS-DP 的最快现场网络。
传输控制通信网络包括主站和从站。
通常,PLC 会作为主站。
最多64个从站可连接至主站。
从站包括远程设备站(处理位数据和字数据)、远程I/O 站(处理位数据)等。
主站存储网络中从站的类型和地址等信息并控制整个网络。
开放式标准(多供应商)由于是开放式通信标准,因此许多制造商的各种设备均可使用。
标准化通信连接器帮助您轻松实现网络重建。
由于在出现故障时可使用不同制造商的设备,从而可减少现场(如工厂)存放的维护零件。
因为是全球标准PROFIBUS DP ,所以在世界各地均可购得类似产品。
1.简介1.5.3一般规格CC-Link规格(Ver.1.10)项目规格波特率(bps)156k、625k、2.5M、5M、10M(bps)连接方式多路广播轮询同步方式帧同步编码方式NRZI传输通道类型总线(符合EIA RS485)传输格式符合HDLC最大设备数量64台从站数量1至64连接电缆CC-Link Ver1.10电缆(3芯双绞线电缆,带屏蔽层)10RC700/RC90选件现场总线I/O Rev.32.4CC-Link2.4.1CC-Link 子板的安装外观CC-Link 连接器传输速率配置开关工作站配置开关(⨯10)工作站配置开关(⨯1)状态显示LEDSD :数据传输状态显示RUN :离线状态显示RD :数据接收状态显示ERRL :错误状态显示现场总线子板在发货时的配置如下。
板的外观配置CN3JMP1CN3DSW2DSW1JMP1SW1SW1SW2SW3IRQ5IRQ7JP1JP2SW2SW4IRQ10JP3SW3SW4SW5SW6IRQ11IRQ15JP4JP5SW7SW812全部开口全部开启如上图进行固定全部开口DSW1DSW21RUN SD ERRLRD规格项目规格名称CC-Link 子板连接方式多路广播轮询波特率(bps)156k 、625k 、2.5M 、5M 、10M (bps )传输距离波特率电缆长度10M (bps )100m 5M (bps )160m 2.5M (bps )400m625k (bps )900m 156k (bps )1,200m 最大设备数量64台电缆支持CC-Link Ver.1.10的专用电缆模式从站接口1个CC-Link V1端口占用的站数1至4个站(远程设备站)主站的信号交换最大输入数据大小384位(48字节)最大输出数据大小384位(48字节)LED 描述LED 状态表示现场总线I/O 板的状态。
LED 状态ERRL 红色RUN 绿色RD 绿色SD 绿色关闭正常工作设备电源关闭离线设备电源关闭无数据接收设备电源关闭无数据传输设备电源关闭打开CRC 错误:站地址错误波特率配置错误正常工作数据接收数据传输闪烁----配置开关配置使用CC-Link 子板上的站配置开关可配置设备站。
使用CC-Link 板上的波特率配置开关可配置波特率。
1.使用站配置开关设置CC-Link 子板的站。
确保在配置时不会使站与网络中的其他设备重复。
打在⨯10侧是以10倍配置数位地址值。
打在⨯1侧是以单倍配置数位地址值。
站可设为1-62。
警告2.设置CC-Link 波特率。
检查主板配置并设置相同的波特率。
有关配置,请参阅下表。
波特率开关156k 0625k 12.5M 25M 310M 4禁止的配置5-9配线CC-Link 连接器为5针开放式连接器。
使用连接至板的连接器进行配线。
各针脚的端子名称端子号端子名称1DA 2DB 3DG 4SLD 5FG按如下所示连接CC-Link 主模块与CC-Link 子板。
终端电阻器主工作站RC620CC-Link 模块终端电阻器准备市售的CC-Link Ver.1.10用电缆作为通信电缆。
在网络两端安装终端电阻器。
使用连接至CC-Link 主站的终端电阻器。
确保仅在切断特定站的电源后断开连接器。
将CC-Link 的屏蔽线连接至各单元的“SLD”并通过“FG”使两端接地。
带屏蔽的双绞电缆带屏蔽的双绞电缆注确保在安装/拆卸任何板或连接/断开任何电缆之前切断电源。
否则会极其危险并可能导致电击和/或设备故障。
(2)(3)板的安装将板安装到机器人控制器RC700/RC90上的专用槽内。
参考手册:机器人控制器RC700/RC90维护篇 6.8选配电路板确认EPSON RC+7.0将CC-Link 子板安装至控制器时,设备会自动识别。
通过以下程序确认EPSON RC+7.0是否已识别了CC-Link 子板。
1.选择[设置]-[设置控制器],之后会显示[设置控制器]对话框。
2.选择[输入/输出]。
3.确保“现场总线”中显示以下信息。
安装:是输入:512-767(默认设置)输出:512-767(默认设置)警告4.选择[现场总线]-[常规]。
(4)5.确保显示以下内容。
现场总线类型:CC-Link输入字节:32(默认设置)输出字节:32(默认设置)6.点击<关闭>。
编辑输入/输出大小必要时,可更改CC-Link子板的输入/输出大小。
1.选择[设置]-[设置控制器],之后会显示[设置控制器]对话框。
2.选择[输入/输出]-[现场总线]-[常规]。
3.更改[输入字节]和[输出字节]的设置。
在本例中,两个设置均改为20字节。
4.点击<应用>。
5.点击<关闭>,之后会出现以下对话框。
机器人控制器RC700/RC90自动开始重启。
6.选择[设置]-[设置控制器],之后会显示[设置控制器]对话框。
7.选择[输入/输出]。
8.确保“现场总线”中显示以下信息。
输入:512–(512+更改的输入数(位数))输出:512–(512+更改的输出数(位数))在本例中,输入字节为20字节(160位),而输入中显示512-671。
另外,输出字节为20字节(160位),而输出中显示512-671。
9.点击<关闭>。
运行当安装CC-Link时,一些运行会与其他现场总线I/O选件不同。
本节将就这些差异进行介绍。
远程输入远程输入(RX)和远程输出(RY)表示开启/关闭信息。
远程数据是位数据,且每16位(1个字)执行一次FROM/TO指令。
下表中的“n”是通过站配置对主站配置的地址。
可通过以下表达计算得出。
n=(站-1)⨯2计算结果为十进制数。
将其转换为十六进制数之后用“n”代替结果。
(示例)CC-Link板站为1时远程输入RXn0至RX(n+5)F→RX00至RX5F远程输出RYn0至RY(n+5)F→RY00至RY5FCC-Link板站为4时远程输入RXn0至RX(n+5)F→RX60至RXAF远程输出RYn0至RY(n+5)F→RY60至RYAF远程输入列表(占用3个站,默认配置*1)信号方向:远程设备站(CC-Link板)→主站(PLC)标识为“不适用”的位是留给用户的。
但对于SPEL+程序可自由使用。
地址信号名称控制器位号RXn0Ready*1512RXn1Start*1513RXn2Paused*1514RXn3Error*1515RXn4EStopOn*1516RXn5SafeguardOn*1517RXn6SError*1518RXn7Waning*1519RXn8MotorsOn*1520RXn9AtHome*1521RXnA CurrProg1*1522RXnB CurrProg2*1523RXnC CurrProg4*1524RXnD AutoMode*1525RXnE TeachMode*1526RXnF ErrorCode1*1527RX(n+1)0ErrorCode2*1528RX(n+1)1ErrorCode4*1529RX(n+1)2ErrorCode8*1530RX(n+1)3ErrorCode16*1531地址信号名称控制器位号RX(n+1)4ErrorCode32*1532RX(n+1)5ErrorCode64*1533RX(n+1)6ErrorCode128*1534RX(n+1)7ErrorCode256*1535RX(n+1)8ErrorCode512*1536RX(n+1)9ErrorCode1024*1537RX(n+1)A ErrorCode2048*1538RX(n+1)B ErrorCode4096*1539RX(n+1)C ErrorCode8192*1540RX(n+1)D CmdRunning*1541RX(n+1)E CmdError*1542RX(n+1)F不适用543RX(n+2)0不适用544::RX(n+4)F不适用591RX(n+5)0不适用592RX(n+5)1不适用593RX(n+5)2不适用594RX(n+5)3不适用595RX(n+5)4不适用596RX(n+5)5不适用597RX(n+5)6不适用598RX(n+5)7不适用599RX(n+5)8不适用600RX(n+5)9不适用601RX(n+5)A不适用602RX(n+5)B远程Ready*2603RX(n+5)C不适用604RX(n+5)D不适用605RX(n+5)E不适用606RX(n+5)F不适用607*1:默认情况下,远程控制输入和输出未分配至现场总线从站I/O。