最新自控第2章作业答案
自动控制理论第二章习题答案
式中 K 为比例常数, P 为阀门前后的压差。若流量 Q 与压差 P 在其平衡点 (Q0 , P0 ) 附近作微小变化,试导出线性化
方程。 解:
设正常工作点为 A,这时 Q0 = K P0
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 Q − Q0 = K1 (P − P0 )
其中 K1
= dQ dP P=P0
=
1K 2
1 P0
2-7 设弹簧特性由下式描述:
F = 12.65 y1.1
其中,是弹簧力;是变形位移。若弹簧在变形位移附近作微小变化,试推导的线性化方程。 解:
设正常工作点为 A,这时 F0
=
12.65
y1.1 0
在该点附近用泰勒级数展开近似为:
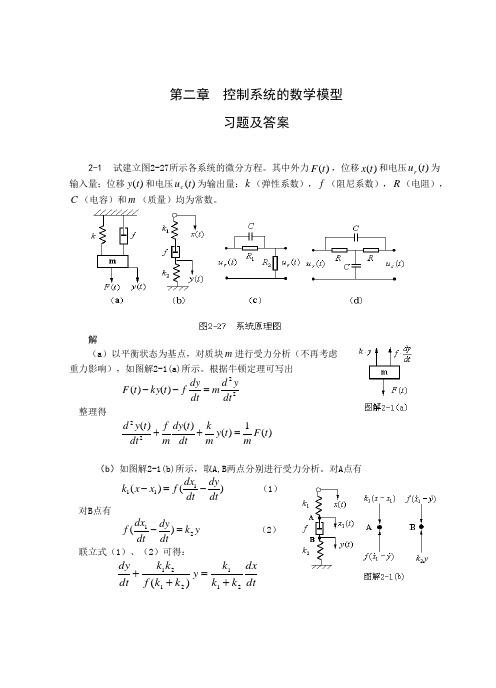
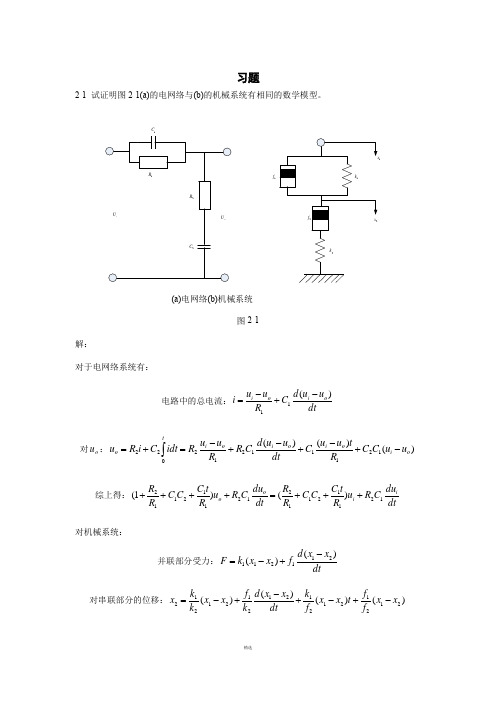
2-3 试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
2
胡寿松自动控制原理习题解答第二章
图 2-58 电网络与机械系统
1
解:(a):利用运算阻抗法得: Z1
=
R1
//
1 C1s
=
R1 C1s
R1
+
1 C1s
=
R1 = R1 R1C1s + 1 T1s + 1
Z2
=
R2
+
1 C2s
(C2
+
2C1 )
du0 dt
+ u0 R
=
C1C2 R
d 2ui dt 2
自动控制原理-第2章习题解答精选全文完整版
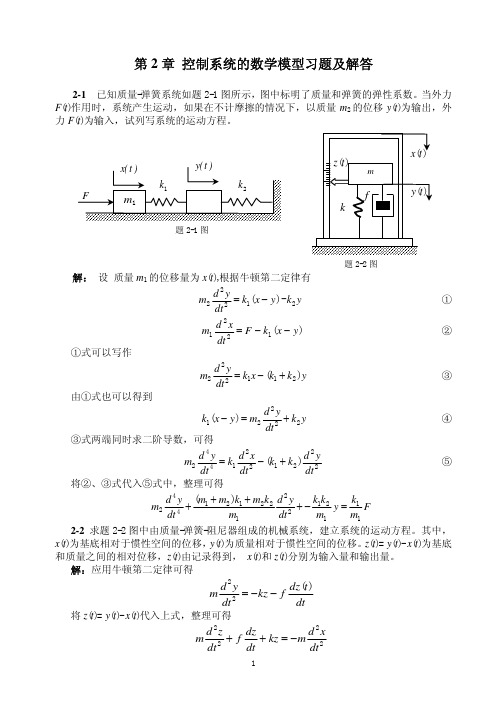
第2章 控制系统的数学模型习题及解答2-1 已知质量-弹簧系统如题2-1图所示,图中标明了质量和弹簧的弹性系数。
当外力F (t )作用时,系统产生运动,如果在不计摩擦的情况下,以质量m 2的位移y (t )为输出,外力F (t )为输入,试列写系统的运动方程。
解: 设 质量m 1的位移量为x (t ),根据牛顿第二定律有y k y x k dt yd m 21222-)(−= ①)(1221y x k F dtxd m −−= ②①式可以写作y k k x k dtyd m )(211222+−= ③由①式也可以得到y k dtyd m y x k 22221)(+=− ④③式两端同时求二阶导数,可得2221221442)(dty d k k dt x d k dt yd m +−= ⑤将②、③式代入⑤式中,整理可得F m k y m k k dty d m k m k m m dt y d m 1112122122121442)(=−++++ 2-2 求题2-2图中由质量-弹簧-阻尼器组成的机械系统,建立系统的运动方程。
其中,x (t )为基底相对于惯性空间的位移,y (t )为质量相对于惯性空间的位移。
z (t )= y (t )- x (t )为基底和质量之间的相对位移,z (t )由记录得到, x (t )和z (t )分别为输入量和输出量。
解:应用牛顿第二定律可得dtt dz f kz dt y d m )(22−−= 将z (t )= y (t )- x (t )代入上式,整理可得2222dtx d m kz dt dz f dt z d m −=++题2-2图题2-1图解:(a )引入中间变量u c (t)表示电容器两端的电压。
根据基尔霍夫电流定律有o c c u R u R dt du C2111=+ 根据基尔霍夫电压定律有o i c u u u −=联立消去中间变量,可得描述输入量u i (t )和输出量u o (t )之间关系的微分方程为i i o o u R dt du C u R R R R dt du C121211+=++ (b )引入回路电流i (t )和电容器两端的电压u c (t)作为中间变量,根据基尔霍夫电压定律有i o u u i R =+1 另有电容元件的元件约束关系方程dtdu Ci c =和i R u u o c 2−=联立求解,消去中间变量可得i i o o u R dt du C u R R R R dt du C121211+=++(c )设电容器C 2两端的电压为u c 2(t),根据基尔霍夫电流定律有dtduC u u R dt u u d C c o i o i 2211)(1)(=−+− ①求导可得22221221)(1)(dtu d C dt u u d R dt u u d C c o i o i =−+− ② 另有输出支路电压方程o c c u u dtdu C R =+2222 等式两边求导有dtdu dt du dt u d C R oc c =+222222 ③将①、②代入③式,整理可得i ii ooo u C R dt du C R C R C R dt u d C R u C R dt du C R C R C R C R dt u d C R 2121221121221212122112121122+++=++++2-4 试求题2-4图所示有源RC 电路的微分方程,其中u i (t )为输入量,u o (t )为输出量。
自动控制原理课后习题答案第二章
第二章2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。
分析首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:即取A、B两点进行受力分析,可得:整理可得:经比较可以看出,电网络(a)和机械系统(b)两者参数的相似关系为2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1)(2)2-7 由运算放大器组成的控制系统模拟电路如图2-6所示,试求闭环传递函数Uc(s)/Ur(s)。
图2-6 控制系统模拟电路解:由图可得联立上式消去中间变量U1和U2,可得:2-8 某位置随动系统原理方块图如图2-7所示。
已知电位器最大工作角度,功率放大级放大系数为K3,要求:(1) 分别求出电位器传递系数K0、第一级和第二级放大器的比例系数K1和K2;(2) 画出系统结构图;(3) 简化结构图,求系统传递函数。
图2-7 位置随动系统原理图分析:利用机械原理和放大器原理求解放大系数,然后求解电动机的传递函数,从而画出系统结构图,求出系统的传递函数。
解:(1)(2)假设电动机时间常数为Tm,忽略电枢电感的影响,可得直流电动机的传递函数为式中Km为电动机的传递系数,单位为。
又设测速发电机的斜率为,则其传递函数为由此可画出系统的结构图如下:--(3)简化后可得系统的传递函数为2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应,试求系统的传递函数和脉冲响应。
分析:利用拉普拉斯变换将输入和输出的时间域表示变成频域表示,进而求解出系统的传递函数,然后对传递函数进行反变换求出系统的脉冲响应函数。
自动控制原理课后习题答案第二章

第 二 章2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。
分析 首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:2221212112212211212112212122111()1()111oiR u C s R R C C s R C R C R C s R u R R C C s R C R C R C C sR C s R C s+++++==+++++++即220012121122121212112222()()i i o id u du d u duR R C C R C R C R C u R R C C R C R C u dt dt dt dt++++=+++取A 、B 两点进行受力分析,可得:o 112()()()i o i o dx dx dx dx f K x x f dt dt dt dt -+-=- o 22()dx dxf K x dt dt -= 整理可得:2212111221121212211222()()o o i i o id x dx d x dx f f f K f K f K K K x f f f K f K K K x dt dt dt dt ++++=+++经比较可以看出,电网络(a )和机械系统(b )两者参数的相似关系为1112221211,,,K f R K f R C C2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1) ;)()(2t t x t x =+(2))。
自动控制原理及其应用_课后习题答案_第二章
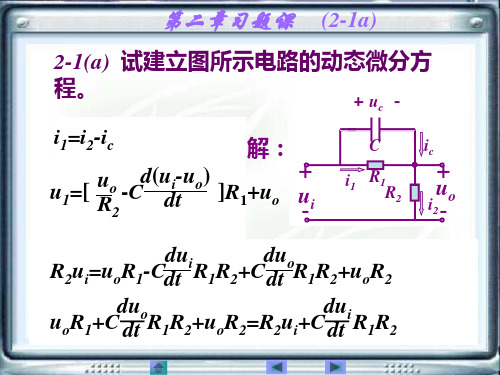
自动控制原理及其应用_课后习题答案_第二章黄坚主编自动化专业课程(2-1a)第二章习题课(2-1a)2-1(a)试建立图所示电路的动态微分方程。
u+ci1=i2-ic+d)+uoR1(ui-uo+u1u[R-CR2u]R1+uoui=dtoi2---C解:CCi1R1R2ic+uoi2-duiduo输入量为ui,输出量为uo。
Rui=u1+uoR2ui=uoR1-CdtR1R2+CdtR12+uoR2ducd(ui-uo)uoic=Cidt=dtu1=i1R1duodui2=RuoR1+CdtR1R2+uoR2=R2ui+CdtR1R22黄坚主编自动化专业课程(2-1b)第二章习题课(2-1b)2-1(b)试建立图所示电路的动态微分方程。
ducCLd2uoduoLduoLic==2+CdtR1uL=dtR2dt+uR2dtd2u+uooCCLoR2duou=+uo+Ci1ii2=Rui=u1+uo2dt-R2R2dt2-输入量为ui,输出量为uo。
u1=i1R1i1=iL+icdiLuL=Ldtducd(ui-uo)ic=Cdt=dtuoiL=i2=R2习题课一(2-2)求下列函数的拉氏变换。
(1)f(t)=in4t+co4tf(t)=in4t+co4tw:L解:∵L[inwt]=22w+L[cowt]=22w+ 4+L∴L[in4t+co4t]=2+162+16+4=2+16黄坚主编自动化专业课程(2)f(t)=t3+e4tf(t)=t3+e4t]=3!+:解:L[t3+1(3)f(t)=tneatf(t)=)=t13!1-4=4+-4:解:L[tneat]=n!(-a)n+1(4)f(t)=(t-1)2e2tf(t)=(t-1)2e2t]=e-(-2)2:解:L[(t-1)(-2)3黄坚主编自动化专业课程2-3-1函数的拉氏变换。
F()=(+1)(+3)F()=+1+1A解:A1=(+2)(+1)(+3)+1A2=(+3)(+1)(+3)1F()=+3-+2F()=2=-3=-1=-2=2f(t)=2e-3t-e-2tf(t)=2e黄坚主编自动化专业课程2-3-2函数的拉氏变换。
自动控制原理第二章习题课答案
第二章习题课
(2-8)
2-8 设有一个初始条件为零的系统,系 统的输入、输出曲线如图,求G(s)。
δ (t)
c(t)
T
解: t
δ (t)
c(t)
T
K 0
K 0
t
-TS K K K c(t)= T t- T (t-T) C(s)= Ts2 (1-e ) C(s)=G(S)
第二章习题课
(2-9)
2-9 若系统在单位阶跃输入作用时,已 知初始条件为零的条件下系统的输出响 应,求系统的传递函数和脉冲响应。 -t 1 -2t R ( s )= c(t)=1-e +e r(t)=I(t) s 2+4s+2) (s 1 1 1 解: C(s)= s - s+2 + s+1 = s(s+1)(s+2) 2+4s+2) ( s G(S)=C(s)/R(s) = (s+1)(s+2)
第二章习题课
(2-1b)
2-1(b) 试建立图所示电路的动态微分方 程。 duc CL d2uo duo du L ic= = +C o L 2 R 1 uL= dt R2 dt dt R2 dt + + 2 uo C CL d uoR2 duo uo u u + +C i1= i o i2= R ui=u1+uo 2 dt - R2 R2 dt - 2 输入量为ui,输出量为uo。 duc d(ui-uo) u1=i1R1 ic=C dt = dt diL uo u =L L dt iL=i2= i1=iL+ic R2
2-11(b) 求系统的 传递函数
G3(s) R(s)
《自动控制原理》---丁红主编---第二章习题答案

2-1(1)a.微分方程(2)a.线性定常2-2.方框、信号线、综合点、引出点2-3.变换变量关系保持不变。
2-4. 222222121)(nn n s s s T s T s G ωζωωζ++=++= 2-5. 输入信号)t (r 和输出信号)t (c 及其各阶导数在0t =时的值均为零。
2-6解:取分离体分析受力如图3-1-3所示。
依据牛顿定律可得()()()22)(dt t y d m a m t f t f t f K B =⋅=-- (1) 式中 K f ── 弹簧力;()t f B ── 阻尼力。
弹簧力与物体位移成正比,即)(t y K f K ⋅= (2)式中 K ── 弹簧刚度阻尼力与运动速度成正比,与运动方向相反,即()dtt dy B f B = (3) 式中 B ── 阻尼系数将式(2)和(3)代入(1)中,可得该系统的微分方程式:()()()()t f t Ky dt t dy B dt t y d m =++22 (4) 若令 K B T B =──时间常数;Km T m =──时间常数。
则(4)式可写成: ()()()()()t f K t f K t y dt t dy T dt t y d T a B m==++1222 式中 KK a 1=2-7. 解:(a );;;(b )2-8.543432143221432)1()()()(K K K K K K K s K K K s K s K K K s R s C +++++=τττ 2-9. (a ) 2423241321121413211)()(H G H G G G G G G G H G G G G G G G s R s C ++++++= (b ) HG G G G G G s R s C 2132211)()(++= 2-10. 22121211)()(H G H G G G G s R s C -+= 221212121)()(H G H G G G G G G s N s C c -+-=2-11.4232121213211)()(G H G G H G H G G G G G s R s C ++++= 2-12.(a ) bhdifjdifj bhfj bhdi bcdefk fj di bh abcdefg s R s C -++++++-=)()(1)()( (b ) 3431324321343136543211)1()()(H G G H G H G G G G H G G H G G G G G G G s R s C ++++++= 2-13解:前向通道:3211G G G P =, 412G G P =; 回路增益:1211H G G L -=, 2322H G G L -=,243H G L -=, 3214G G G L -=,415G G L -=;特征式:41321242321211G G G G G H G H G G H G G +++++=∆,11=∆,12=∆; 4132124232121413211)(G G G G G H G H G G H G G G G G G G s ++++++=Φ 2-14 解:前向通道:3211G G G P =,342G G P =;回路增益:213211H H G G G L -=,112H G L -=,233H G L -=,互不接触回路L2和L3特征式:2131112321321H H G G H G H G H H G G G 1++++=∆,11=∆,112H G 1+=∆;21311123213211143321H H G G H G H G H H G G G 1)H G 1(G G G G G )s (++++++=Φ2-15解:先将系统结构图化简为如下形式回路增益:33211H G G G L -=,222H G L -=,113H G L -=,特征式:112233211H G H G H G G G +++=∆ C(s)/R(s):前向通道:3211G G G P =,11=∆, M(s)/N(s): 前向通道:22G P =,12=∆ E(s)/R(s): 前向通道:13=P ,112231H G H G ++=∆ 112233213211H G H G H G G G G G G )s (C R +++=Φ 1122332121H G H G H G G G G )s (N M +++=Φ 11223321112211H G H G H G G G H G H G )s (ER +++++=Φ。
自动控制原理第2章练习题
第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4) 联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
自动控制原理课后习题答案第二章

解:由图可得
联立上式消去中间变量U1与U2,可得:
2-8某位置随动系统原理方块图如图2-7所示。已知电位器最大工作角度,功率放大级放大系数为K3,要求:
(1) 分别求出电位器传递系数K0、第一级与第二级放大器得比例系数K1与K2;
(2) 画出系统结构图;
(3) 简化结构图,求系统传递函数。
证明:(a)根据复阻抗概念可得:
即 取A、B两点进行受力分析,可得:
整理可得:
经比较可以瞧出,电网络(a)与机械系统(b)两者参数得相似关系为
2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式得模态。
(1)
(2)
2-7由运算放大器组成得控制系统模拟电路如图2-6所示,试求闭环传递函数Uc(s)/Ur(s)。
2-10试简化图2-9中得系统结构图,并求传递函数C(s)/R(s )与C(s)/N(s)。
图2-9 题2-10系统结构图
分析:分别假定R(s)=0与N(s)=0,画出各自得结构图,然后对系统结构图进行等效ቤተ መጻሕፍቲ ባይዱ换,将其化成最简单得形式,从而求解系统得传递函数。
解:(a)令N(s)=0,简化结构图如图所示:
可求出:
令R(s)=0,简化结构图如图所示:
所以:
(b)令N(s)=0,简化结构图如下图所示:
所以:
令R(s)=0,简化结构图如下图所示:
2-12 试用梅逊增益公式求图2-8中各系统信号流图得传递函 数C(s)/R(s)。
图2-11 题2-12系统信号流图
解:
(a)存在三个回路:
存在两条前向通路:
所以:
(3)简化后可得系统得传递函数为
自控原理习题解答(第二章)
[答2 ( 31 ) 1 ) ] (t) x(t) (t) Tx T sx(s) x (s) 1 1 1 T x (s) 1 T s 1 s T 1 t 1 T 1 1 T x ( t ) L x (s) L e 1 s T T
答2 4(c)
e y (s) e x (s) C2 1 1 I(s) R 1 R2 C1s C 2s R 2 C 1 C 2 s 2 C 1s 1 R 2 C1 C 2 s C1 2 (R1 R 2 )C1C 2 s C 2 s C1s (R1 R 2 )C1C 2 s C 2 C1 R 2 C1 C 2 s C1 (R1 R 2 )C1C 2 s C 2 C1 (R1 R 2 )C1C 2 s C 2 C1 R 2 C1 C 2 C1 s K d Td s C 2 C1 C 2 C1 K (R1 R 2 )C1C 2 s (R1 R 2 )C1C 2 s Td s 1 T s 1 1 1 C 2 C1 C 2 C1 为实际微分环节 惯性环节 1 I(s) (R 2 ) C 2s
X(s) G1 G1 H3 H2 H1
-
Y(s) G2
G3
G4 X(s)
G1
-
-
G2 H3
-
Y(s) G3 G4
-
H2
G4 H3
1 2e 2t e t cos 3t 3s2 2s 8 8 A s 1 2 s(s 2)(s 2s 4) s 0 2 4 3s2 2s 8 B (s 2) 2 2 s(s 2)(s 2s 4) s 2
第2章-自动控制原理习题答案
习题2-1 试证明图2-1(a)的电网络与(b)的机械系统有相同的数学模型。
1C 1f 1(a)电网络(b)机械系统图2-1解:对于电网络系统有:电路中的总电流:dtu u d C R u u i o i o i )(11-+-=对o u :)()()(1211121222o i o i o i o i to u u C C R t u u C dt u u d C R R u u R idt C i R u -+-+-+-=+=⎰综上得:dtdu C R u R tC C C R R dt du C R u R t C C C R R i i o o 1211211212112112)()1(+++=++++对机械系统:并联部分受力:dtx x d f x x k F )()(211211-+-= 对串联部分的位移:)()()()(21212121212121212x x f f t x x f k dt x x d k f x x k k x -+-+-+-=整理得:dtdx k f x f f t f k k k dt dx k f x f f t f k k k 12122121212211212121)()1(+++=++++所以,两系统具有相同的数学模型2-5求图2-2中RC 电路和运算放大器的传递函数c ()/()i U s U s 。
1R1R(a) RC 电路 (b) RC 电路1R(c) RC 电路 (d) 运算放大器图2-2解:21212)()()R sCR R R R s u s u a r c ++=οο1)()()()()()()3122112322121121211231212112++++++++=S R C R C R C S R R C C R R C C SR C R C S R R C C R R C C s u s u b rc οο2121212)()()()R R S CR CR R R CS R s u s u c r c +++=οο21212112)()()()S LCR R R S CR R LR R LS s u s u d r c ++++=οο2-6求图2-3所示系统的传递函数C(s)/D(s)和E(s)/D(s)。
自动控制原理第2章课后习题及解答
+
1 C2R2
uc
=
du
2 r
dt 2
+
2 CR
dur dt
+
1 C2R2
ur
(c) 由图解 2-2(c)可写出
Ur (= s) R1 [I1(s) + I2 (s)] + (Ls + R2 )I2 (s) (6)
1 Cs
I1
(s)
=
(Ls
+
R2
)I2
(s)
(7)
U c (s) = R2 I 2 (s)
第 2 章习题及解答
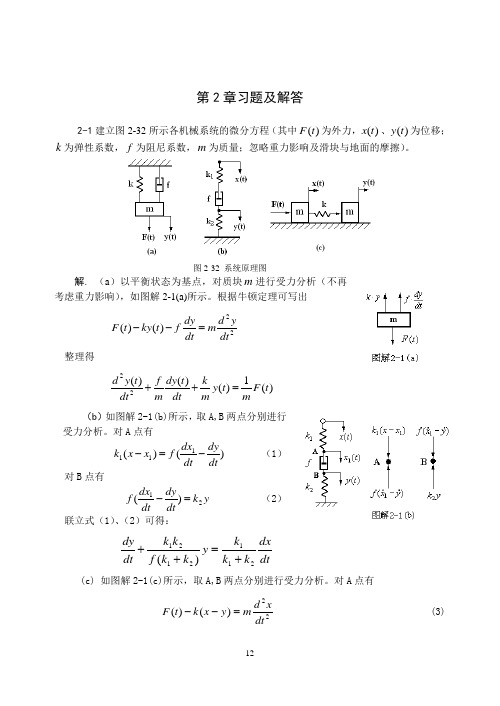
2-1 建立图 2-32 所示各机械系统的微分方程(其中 F (t) 为外力,x(t) 、y(t) 为位移; k 为弹性系数, f 为阻尼系数, m 为质量;忽略重力影响及滑块与地面的摩擦)。
图 2-32 系统原理图
解. (a)以平衡状态为基点,对质块 m 进行受力分析(不再
考虑重力影响),如图解 2-1(a)所示。根据牛顿定理可写出
2
2
X (s=)
e−s s2
(s
+
1) 2
−
e−3s s2
(2s
+
1) 2
(c) x(t) = a + (b − a)(t − t1 ) − (b − c)(t − t2 ) − c(t − t3 ) X (s) = 1 [a + (b − a)e−t1s − (b − c)e−t2s − ce−t3s ] s
k1k 2
k1 k2 k1
图解 2-3(a)
(b) 由图可写出
Uc (s) =
Ur (s)
R2
自动控制原理第二版课后答案第二章精选全文完整版

x kx ,简记为
y kx 。
若非线性函数有两个自变量,如 z f (x, y) ,则在
平衡点处可展成(忽略高次项)
f
f
z xv
|( x0 , y0 )
x y |(x0 , y0 )
y
经过上述线性化后,就把非线性关系变成了线性 关系,从而使问题大大简化。但对于如图(d)所示的 强非线性,只能采用第七章的非线性理论来分析。对于 线性系统,可采用叠加原理来分析系统。
Eb (s) Kbsm (s)
Js2 m(s) Mm fsm(s)
c
(s)
1
i
m
(s)
45
系统各元部件的动态结构图
传递函数是在零初始条件下建立的,因此,它只 是系统的零状态模型,有一定的局限性,但它有现 实意义,而且容易实现。
26
三、典型元器件的传递函数
1. 电位器
1 2
max
E
Θs
U s
K
U
K E
max
27
2. 电位器电桥
1
2
E
K1p1
K1 p 2
U
Θ 1
s
Θ
K1 p
Θ 2
s
U s
28
3.齿轮
传动比 i N2 N1
G2(s)
两个或两个以上的方框,具有同一个输入信号,并 以各方框输出信号的代数和作为输出信号,这种形
式的连接称为并联连接。
41
3. 反馈连接
R(s)
-
C(s) G(s)
H(s)
一个方框的输出信号输入到另一个方框后,得 到的输出再返回到这个方框的输入端,构成输 入信号的一部分。这种连接形式称为反馈连接。
自动控制原理课后习题答案第二章
第二章2-3试证明图2-5( a )的电网络与(b)的机械系统有相同的数学模型。
分析首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找岀两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列岀系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:即取A、B两点进行受力分析,可得:整理可得:经比较可以看岀,电网络( a)和机械系统(b)两者参数的相似关系为2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指岀各方程式的模态。
(1)(2 )2-7由运算放大器组成的控制系统模拟电路如图2-6所示,试求闭环传递函数U c ( s )/Ur ( s)。
图2-6 控制系统模拟电路解:由图可得联立上式消去中间变量U1和U2,可得:2-8某位置随动系统原理方块图如图2-7所示。
已知电位器最大工作角度,功率放大级放大系数为K3,要求:(1) 分别求岀电位器传递系数K 0、第一级和第二级放大器的比例系数 K 1和K 2;(2) 画岀系统结构图; (3) 简化结构图,求系统传递函数。
图2-7 位置随动系统原理图(2)假设电动机时间常数为 Tm 忽略电枢电感的影响,可得直流电动机的传递函数为 式中Km 为电动机的传递系数,单位为。
又设测速发电机的斜率为,则其传递函数为由此可画岀系统的结构图如下:(3)简化后可得系统的传递函数为2-9若某系统在阶跃输入 r(t)=1(t) 时,零初始条件下的输岀 响应,试求系统的传递函数 和脉冲响应。
分析:利用拉普拉斯变换将输入和输出的时间域表示变成频域表示,进而求解出系统的传递函数,然后对传递函数进行反变换求岀系统的脉冲响应函数。
解:(1),则系统的传递函数 (2)系统的脉冲响应2-10试简化图2-9中的系统结构图,并求传递函数 C(s)/R(s ) 和C(s)/N(s) 分析:分别假定R(s)=o 和N(s)=O ,画出各自的结构图,然后对系统结构图进行等效变换, 将其化成最简单的形式,从而求解系统的传递函数。
自动控制原理第二章到第七章课后习题答案

自动控制原理第二章到第七章课后习题答案第二章2-1试求下图所示电路的微分方程和传递函数。
解:(a )根据电路定律,列写出方程组:001Li R c L R C di L u u dtu R i i dt Ci i i ⋅+==⋅==+⎰消除中间变量可得微分方程:20002i d u du L L C u u dt R dt⋅⋅+⋅+=对上式两边取拉氏变换得:2000()()()()i LL C U s s U s s U s U s R⋅⋅⋅+⋅⋅+= 传递函数为022()1()()1i U s R G s L U s R Ls LCRs s LCs R ===++++ (b )根据电路定律,列写出方程组:12011()i i u i R R idt C u u i R =++-=⎰消除中间变量可得微分方程:121012i R R Ru u idt R R C+=-⎰ 对上式两边取拉氏变换得:2012()(1)()(1)i U s R Cs U s R Cs R Cs +=++传递函数为0212()1()()1i U s R CsG s U s R Cs R Cs+==++2-3求下图所示运算放大器构成的电路的传递函数。
解:(a )由图(a ),利用等效复数阻抗的方法得22111(s)1(s)()1o i R U R Cs Cs G U s R R Cs ++==-=-+(b )由图(b ),利用等效复数阻抗的方法得222121211221211111(s)()1(s)1()1o i R U C s R R C C s R C R C s G U s R C s R C s R C s++++==-=-+2-5试简化下图中各系统结构图,并求传递函数()()C s R s 。
2-6试求下图所示系统的传递函数11()()C s R s ,21()()C s R s ,12()()C s R s 及22()()C s R s 。
自动控制原理参考答案-第2章

La ⎧ ⎪Tl = R a ⎪ JRa ⎪ ⎪Tm = C C e m ⎪ ⎨ ⎪ K = 2k1 H 0 ⎪ 1 k2 ⎪ 2F H 0 ⎪ ⎪T1 = k2 ⎩
题 2-8:试用动态结构图简化方法求解题 2-8 图所示两系统的传递函数。
u2
L R ia
+
u i(t)
+
u d (t)
+
Ea
M m(t)
J1
f1 r 1 f2
-
-
-
ω1 r2
M c(t)
+ if 题 2-5 图
ω2
J2
电枢控制直流电动机拖动开环系统
(1) ud (t ) = 2.34U 2 {0.82 − 0.57[ K1ui (t ) − 35o ]} = 2.34U 2 {1.168 − 0.57 K1ui (t )} (2) 参照教材 38 页图 2-24 (3) 参照教材式(2-4)、(2-5)、(2-6)、(2-17) 2.73U 2 ⎧ ′ ( s) = M c ( s) / i ⎧M c − 1.34 K1U 2U i ( s) ⎪U d ( s ) = s ⎪ ⎪ ⎪i = r2 / r1 ⎪ LsI ( s ) + RI ( s ) + C Ω ( s ) = U ( s ) 其中, ⎨ a e 1 d ⎨ a 2 ⎪ J = J1 + J 2 / i ⎪ M ( s ) = Cm I a ( s ) ⎪ f = f + f / i2 ⎪ 1 2 ⎩ ′ ( s) ⎪ ⎩ JsΩ1 ( s ) + f Ω1 ( s ) = M ( s ) − M c
⇒
[iJLs 3 + (iJR + ifL) s 2 + (ifR + iCmCe ) s ]Ω1 ( s ) = 2.73CmU 2 − 1.34 K1CmU 2 sU i ( s ) − ( Ls + R ) M c ( s )