程序控制指令-5
西门子PLC指令教程 应用指令
•图5.10 中断调用程序
•第5章 应用指令
3. 中断程序 (1)构成 中断程序必须由三部分构成:中断程序标号、 中断程序指令和无条件返回指令。 (2)要求 (3)编制方法 (4)注意事项
返回本节
•第5章 应用指令
5.2.3 通信
通信指令包括: XMT,自由口发送指令 RCV,自由口接收指令 NETR,网络读指令 NETW,网络写指令 GPA,获取口地址指令
2. 写实时时钟 TODW,写实时时钟指令。用来设定实时时钟。 当使能输入有效时,系统将包含当前时间和日 期,一个8字节的缓冲区将装入时钟。
•第5章 应用指令
时钟缓冲区的格式如表5.2所示。
•表5.2 时钟缓冲区
•第5章 应用指令
程序实例 控制要求: 编写一段程序,可实现读、写实时时钟,并以BCD码显示分钟。时 钟缓冲区从VB100开始。 程序中的子程序SBR_0为写时钟子程序,将当前时间写入从VB100 开始的8字节时间缓冲区,时间设置如下表5.3所示。程序实现:读 写时钟程序如图5.9所示。
//使能输入 //调用子程序 //SBR_1
•图5.4 子程序调用举例
•第5章 应用指令
3. 带参数的子程序调用
(1)子程序参数 ➢变量名 ➢变量类型 ➢数据类型 (2)参数子程序调用的规则 (3)变量表使用 (4)程序实例
•第5章 应用指令
以上面指令为例,局部变量表分配如表5.1所示, 程序段如图5.5所示。
LD CALL
I0.0 SBR_0
//使 能 输 入 //调 用 子 程 序 0 //本 梯 级 为 二 级 //循 环 体 的 功 能 段
NEXT
//循 环 结 束 指 令
LD IN C W
西门子PLC编程指令

西门子PLC编程指令1、位逻辑指令(1)-||-常开接点(地址)(2)-|/|-常闭接点(地址)(3)XOR位异或(4)-|NOT|-信号流反向(5)-()输出线圈(6)-(#)-中间输出(7)-(R)线圈复位(8)-(S)线圈置位(9)RS复位置位触发器(10)RS置位复位触发器(11)-(N)-RLO下降沿检测(12)-(P)-PLO上升沿检测(13)-(SAVE)将RLO存入BR存储器(14)MEG地址下降沿检测(15)POS地址上升沿检测2、比较指令(1)CMP?I整数比较(2)CMP?D双整数比较(3)CMP?R实数比较3、转换指令(1)BCD_IBCD码转换为整数(2)I_BCD整数转换为BCD码(3)I_DINT整数转换为双整数(4)BCD_DIBCD码转换为双整数(5)DI_BCD双整数转换为BCD码(6)DI_REAL双整数转换为浮点数(7)INV_I整数的二进制反码(8)INV_DI双整数的二进制反码(9)NEG_I整数的二进制补码(10)NEG_DI双整数的二进制补码(11)NEG_R浮点数求反(12)ROUND舍入为双整数(13)TRUNC舍去小数取整为双整数(14)CEIL上取整(15)FLOOR下取整4、计数器指令(1)S_CUD加减计数(2)S_CU加计数器(3)S_CD减计数器(4)-(SC)计数器置初值(5)-(CU)加计数器线圈(6)-(CD)减计数器线圈5、数据块指令(1)-(OPN)打开数据块:DB或DI6、逻辑控制指令(1)-(JMP)无条件跳转(2)-(JMP)条件跳转(3)-(JMPN)若非则跳转(4)LABEL标号7、整数算术运算指令(1)ADD_I整数加法(2)SUB_I整数减法(3)MUL_I整数乘法(4)DIV_I整数除法(5)ADD_DI双整数加法(6)SUB_DI双整数减法(7)MUL_DI双整数乘法(8)DIV_DI双整数除法(9)MOD_DI回送余数的双整数8、浮点算术运算指令(1)基础指令①ADD_R实数加法②SUB_R实数减法③MUL_R实数乘法④DIV_R实数除法⑤ABS浮点数绝对值运算(2)扩展指令①SQR浮点数平方②SQRT浮点数平方根③EXP浮点数指数运算④LN浮点数自然对数运算⑤SIN浮点数正弦运算⑥COS浮点数余弦运算⑦TAN浮点数正切运算⑧ASIN浮点数反正弦运算⑨ACOS浮点数反余弦运算⑩ATAN浮点数反正切运算9、赋值指令(1)MOVE赋值10、程序控制指令(1)-(Call)从线圈调用FC/SFC(无参数) (2)CALL_FB从方块调用FB(3)CALL_FC从方块调用FC(4)CALL_SFB从方块调用SFB(5)CALL_SFC从方块调用SFC(6)-(MCR<)主控继电器接通(7)-(MCR>)主控继电器断开(8)-(MCRA)主控继电器启动(9)-(MCRD)主控继电器停止(10)-(RET)返回11、移位和循环指令(1)移位指令①SHR_I整数右移②SHR_DI双整数右移③SHL_W字左移④SHR_W字右移⑤SHL_DW双字左移⑥SHR_DW双字右移(2)循环指令①ROL_DW双字左循环②ROR_DW双字右循环12、状态位指令(1)OV-||-溢出异常位(2)OS-||-存储溢出异常位(3)UO-||-无序异常位(4)BR-||-异常位二进制结果(5)==0-||-结果位等于"0"(6)<>0-||-结果位不等于"0" (7)>0-||-结果位大于"0"(8)<0-||-结果位小于"0"(9)>=0-||-结果位大于等于"0" (10)<=0-||-结果位小于等于"0"13、定时器指令(1)S_PULSE脉冲S5定时器(2)S_PEXT扩展脉冲S5定时器(3)S_ODT接通延时S5定时器(4)S_ODTS保持型接通延时S5定时器(5)S_OFFDT断电延时S5定时器(6)-(SP)脉冲定时器线圈(7)-(SE)扩展脉冲定时器线圈(8)-(SD)接通延时定时器线圈(9)-(SS)保持型接通延时定时器线圈(10)-(SF)断开延时定时器线圈14、字逻辑指令(1)WAND_W字和字相"与"(2)WOR_W字和字相"或"(3)WAND_DW双字和双字相"与" (4)WOR_DW双字和双字相"或" (5)WXOR_W字和字相"异或" (6)WXOR_DW双字和双字相"异或“。
SLC的功能指令
复位有效电平控制位;0(高电平有 效),1(低电平有效) 启动有效电平控制位;0(高电平有 效),1(低电平有效) 正交计数器计数速率选择,0(4X),1(1X)
计数方向控制位;0(减计数),1(增计数)
SM37.4 SM37.5 SM37.6 SM37.7
向HSC中写入计数方向;0(不更新),1(更 新计数方向)
返回目录
1.高速脉冲输出指令的格式
PLS Q STL指令
2.高速脉冲的输出方式 高速脉冲输出可分为:
高速脉冲串输出(PTO):提供方波输出,用户控制脉冲周期和脉冲数 宽度可调脉冲输出(PWM):提供连续、占空比可调的脉冲输出,用户 控制脉冲周期和脉冲宽度
返回目录
3.输出端子的连接 每个CPU有两个PTO/PWM发生器产生高速脉冲串和脉冲宽度可调
当前值大于预置值状 态位;0(小于等 于);1(大于)
指出了当前计数方向 当前值与预置值是否相等 当前值是否大于预置值的状态
可以通过监视高速计数器的状态位产生相应中断,完成重要操作。 返回目录
5. 高速计数器设置过程 为更好地理解和使用高速计数器,下面给出高速计数器的一般设置过
程。 (1)使用初始化脉冲触点SM0.1调用高速计数器初始化操作子程序。(这个 结构可以使系统在后续的扫描过程中不再调用这个子程序,从而减少了 扫描时间,且程序更加结构化)。
返回目录
2 指令功能 (1) 定义高速计数器指令(HDEF):
“HSC”端口指定高速计数器编号(0~5), “MODE”端口指定工作模式(0~11,各高速计 数器至多有12种工作模式)。EN端口执行条件 存在时,HDEF指令为指定的高速计数器选定一 种工作模式。在一个程序中,每一个高速计数器 只能使用一次HDEF指令。
常用编程指令

概述 与坐标和坐标系有关的指令 运动路径控制指令 辅助功能及其他功能指令 不同数控系统功能的比较
第5章 数控编程常用指令
5.1 概述
一、数控编程常用指令代码分类 1、准备功能G、辅助功能M、主轴功能S、进
给功能F、刀具功能T代码 2、模态G代码和非模态G代码 3、模态M功能和非模态M功能 4、前作用M功能和后作用M功能
5.3.5 圆弧进给及螺旋线进给指令
1、圆弧插补指令
程序段格式:
Y
G02 X__Y__I__J__F__或
G02 G03
G02 G03
G02 G03
G02 X__Y__R__F__
G03 X__Y__I__J__F__或 G03 X__Y__R__F
X
Z
第5章 数控编程常用指令
1、圆弧插补指令
如图所示图例,设刀具由坐标原点O相对工件快速进给到A点,从A点开 始沿着A、B、C、D、E、F、A的线路切削,最终回到原点O。
2、M01——计划停止指令 M01指令的功能与M00相似,不同的是,M01只有在预先按
下控制面板上“选择停止开关”按钮的情况下,程序才会停 止3。、M02——程序结束指令
M02指令的功能是程序全部结束。此时主轴停转、切削液 关闭,数控装置和机床复位。该指令写在程序的最后一段。
第5章 数控编程常用指令
个程序字(或功能字)组成,用来表示数控机床的某一个动 作或一组动作。
程序段格式是指程序段中的字、字符和数据的安排形 式。现在一般使用字地址可变程序段格式,每个字长不固定, 各个程序段中的长度和功能字的个数都是可变的。地址可变 程序段格式中,在上一程序段中写明的、本程序段里又不变 化的那些字仍然有效,可以不再重写。这种功能字称之为续 效字。
S7-1500PLC应用技术 第4章 S7-1500 PLC的常用指令

54
Date: 2023-08-01
Page:
4.5 程序控制操作指令
• JMP(N)指令
55
Date: 2023-08-01
Page:
4.5 程序控制操作指令
• JMP_LIST指令
56
Date: 2023-08-01
44
Date: 2023-08-01
Page:
4.4 数据处理与运算指令
• 数据转换指令-取整指令
45
Date: 2023-08-01
Page:
4.4 数据处理与运算指令
• 数据转换指令-截尾取整指令
46
Date: 2023-08-01
Page:
4.4 数据处理与运算指令
• 数据转换指令-标定指令
72
Date: 2023-08-01
Page:
4.7 基本指令应用示例
• 示例2:交通灯控制系统设计
73
Date: 2023-08-01
Page:
4.7 基本指令应用示例
• 示例3:多台设备运行状态监控系统设计
1 . 控制要求 某车间排风系统,由三台风机组成,采用S7-1500 PLC控制。现要 求根据风机工作状态进行监控,并通过指示灯信号进行显示,具体控 制要求如下: 1 当系统中没有风机工作时,指示灯以2Hz频率闪烁; 2 当系统中只有1台风机工作时,指示灯以0.5Hz频率闪烁; 3 当系统中有2台以上风机工作时,指示灯常亮。 试根据以上控制要求编写风机状态监控程序。
69
Date: 2023-08-01
Page:
罗克韦尔PLC培训教程514P-BD
第1章 可编程序控制器系统概述
(8)易于系统扩展,在扩展系统时只要很小 变更; (9)用户程序存储器容量至少能扩展到4K以 上。 这些要求实际上提出了将继电器控制系统 的简单易懂、使用方便、价格低的优点与计 算机的功能完善、灵活性、通用性好的特点 结合起来,将继电接触器控制硬接线逻辑转 变为计算机的软件逻辑编程的设想。
第2章 可编程序控制器处理器及 I/O模块
3. 支持由定时器和事件驱动的处理器中断子程序, 支持PID算法,通用指令系列包括基本和扩展 的ASCII字符串指令以及包括对数、指数、三 角、统计等浮点运算功能。 4. 内置可组态RS–232/422/423串行口,以及最大 距离可达 3048m 的 DH+ 网、远程 I/O( 可组态 ) 链路通信口。 5. 口令和权限操作保护。
第1章 可编程序控制器系统概述
1971年日本开始生产可编程序控制器; 1973 年欧洲开始生产可编程序控制器, 到现在世界各国一些著名的电气制造商 几乎都在生产 PLC 装置,如美国罗克韦 尔自动化公司的A-B、欧洲的西门子、日 本的三菱、日本的 OMROM 、美国的 GE 等, PLC 已作为一个独立的工业设备被 列入生产中,成为当代电控装置的主导。
第1章 可编程序控制器系统概述
第三部分是诊断及出错处理: 可编程序控制器每扫描一次,就执行 一次自诊断,检查诸如 CPU 、电池电压、 程序存储器、I/O 通讯是否异常或出错, 如查出错误或异常, CPU 面板上的指示 灯就会指示,并在特殊寄存器中存入出 错代码。若出现致命错误, CPU 就会被 强制成STOP方式,停止扫描。
第1章 可编程序控制器系统概述
PLC的历史 1969年美国数字设备公司(DEC)根 据上述要求,研制出世界上第一台可编 程序控制器,并在GM公司汽车生产线上 首次应用成功。当时人们把它称为可编 程 序 逻 辑 控 制 器 PLC ( Progrmmable Logic Controller),只是用它取代继电接 触器控制,功能仅限于执行继电器逻辑、 计时、计数等。可编程序控制器问世后, 发展极为迅速。
微机原理2007年-第三章-指令系统第五节控制转移
③ 段间直接转移 段间直接转移
指令中给出的16位的段和 位的偏移地址送到CS和IP。 指令中给出的16位的段和16位的偏移地址送到CS和IP。 位的段和16位的偏移地址送到
④ 段间间接转移 段间间接转移
MEM中给出的 位的段和 位的偏移地址送到CS和IP。 MEM中给出的16位的段和16位的偏移地址送到CS和IP。 中给出的16位的段和16位的偏移地址送到
6
例:代码段内有一条无条件转移指令
JMP SHORT NEXT 指令本身占有两个字节 操作码占一个字节; 位位移量占有一个字节 操作码占一个字节;8位位移量占有一个字节
内存
... 源程序 : 条件转移指令: 条件转移指令:JMP SHORT next qqq: ... ... next: MOV AL,03H
5
① 段内直接转移 转移的目标地址由指令直接给出。 段内转移,故转移后CS内容保持不变, 段内转移,故转移后CS内容保持不变,只改 变IP的值。 IP的值。
汇编语言中格式 JMP SHORT OPRD JMP NEAR PTR OPRD 位移量 转移范围 8位 -128~+127 128~ 16位 16位 -32768~+32767 32768~
13
JMP DWORD PTR [SI]的机器码 11111111 11101100 DS:[SI]
4000 DS +) 1212 SI 41212 41212 41213 41214 41215
00 10 00 4A
1000 4A00
IP CS
段间间接转移操作示意图
14
(2)条件转移指令 (2)条件转移指令 - JXX 条件转移指令可实现程序的条件分支。 条件转移指令根据标志位的状态来决定是 否进行分支转移。(判位转移) 格式: JXX label xx为条件名称缩写 ;xx为条件名称缩写 指令的转移范围为-128~+127字节。 指令的转移范围为-128~+127字节。
任务五-PMC控制与应用
分割1 分割2
SUB2
分割n
• 如果第一级程序较长,那么总的执行时间 就会延长。因此编制的第一级程序应尽可 能短。
• 一般第一级程序仅处理短脉冲信号。这些 信号包括急停、坐标轴超程、外部减速、 跳步、到达测量位置和进给暂停信号。
• 程序编制完成后,在向CNC的调试RAM中传送时,第二 级程序被自动分割。第二级程序的分割是为了执行第一级 程序。当分割数为n时,程序的执行过程如图所示。
X123.7
位号(0到7) 地址号(字母后四位数以内)
编制PMC程序时所需的地址
接口地址分配: • CNC→PMC相关信号:地址为F0到F255 • PMC→CNC相关信号:地址为G0到G255 • PMC与机床(MT)之间的地址: ➢ 当使用I/O Link时:PMC→MT:地址从Y0到Y127。
• 主要的结构化编程方法有三种:子程序、 嵌套、条件分支。
PMC基本指令
• PMC指令分为基本指令和功能指令两种类 型。
• 基本指令是在设计顺序程序时最常用的指 令,它们执行一位运算,例如AND或OR, 共有14种。
PMC语言及编程
顺序程序的设计方法有两种: • 一种是使用助记符语言(RD,AND,OR等PMC指令),
由于PMC顺序控制由软件来实现,所以和一般的继电 器电路的工作原理不尽相同。
• 在一般的继电器控制电路中,各继电器在时间上完全可以 同时动作。在下图所示的电路中,当继电器A动作时,继 电器D和E可同时动作。在PMC顺序控制中,各个继电器 依次动作,当继电器A动作时,继电器D首先动作,然后 继电器E才动作。即各个继电器按梯形图中的顺序动作。
接口地址
• 地址用来区分信号。不同的地址分别对应机床侧 的输入/输出信号、CNC侧的输入/输出信号、内 部继电器、计数器、计时器、保持型继电器和数 据表。PMC程序中主要使用四种类型的地址。
三菱FX3U系列PLC编程技术与应用-第五章

§5.3 传送比较指令及其应用
5.3.3 基础知识:传送类指令
1.传送指令FNC12 MOV 源操作数[S]:K、H、KnX、KnY、KnM、KnS、T、C、D、V、Z 目的操作数[D]:KnY、KnM、KnS、T、C、D、V、Z 传送指令应用:当X0接通时将源操作数S的内容传送到目的操作数D,且源操作数 的内容不变。
§5.1 功能指令概述
5.1.1 功能指令格式
5.1.2 数据寄存器D
功能指令是由操作码与操作数两部
分组成。操作码又称为指令助记符,用来
数据寄存器是用于存放各种数据的软
表示指令的功能;操作数用来指明参与操 元件。FX3U系列PLC中每一个数据寄存
作的对象。操作数又分为源操作数、目的 器都是16位的(最高位为正、负符号位),
§5.3 传送比较指令及其应用
5.多点传送指令FNC16 FMOV
源操作数[S]:K、H、KnX、KnY、 KnM、KnS、T、C、D、V、Z
目的操作数[D]:KnY、KnM、 KnS、T、C、D
其它操作数n:K、H
如图所示将源操作数S的软元件 内容向以目的操作数D指定的软元 件为开头的n点软元件进行传送, 传送后目的软元件中的内容都一样。
§5.3 传送比较指令及其应用
5.3.4应用实例:PLC控制计件包装系统
某一运计件包装系统的工作过程示意图
按下按钮SB1启动传送带1转动, 传送带1上的器件经过检测传感器时, 传感器发出一个器件的计数脉冲,并将 器件传送到皮带2上的箱子里进行计数 包装,根据需要盒内的工件数量由外部 拨码盘设定(0~99),且只能在系统 停止时才能设定,用两位数码管显示当 前计数值,计数到达时,延时3秒钟, 停止传送带1,同时启动传送带2,传送 带2保持运行5秒后,在启动传送带1, 重复以上计数过程,当中途按下了停止 按钮SB2后,则本次包装结束才能停止。
第5章 S7-200系列PLC的基本指令

在使用时需指明三点:操作性质、开始位和位的
数量。
电气控制与PLC原理及应用(第2版)
(1)置位指令 : S bit,N 将位存储区的指定位(位bit)开始的N个同类存 储器位置位。
开始位
位的数量
操作性质
电气控制与PLC原理及应用(第2版)
(2)复位指令 :R bit,N 将位存储区的指定位(位bit)开始的N个同类 存储器位复位。当用复位指令时,如果是对定时 器T位或计数器C位进行复位,则定时器位或计数 器位被复位,同时,定时器或计数器的当前值被 清零。
电气控制与PLC原理及应用(第2版)
5.1.1
位操作指令
PLC位操作指令主要用来实现逻辑控制
和顺序控制,是PLC常用的基本指令。 触点和线圈指令是PLC应用最多的位操
作指令。
电气控制与PLC原理及应用(第2版)
1.逻辑取及线圈驱动指令 LD(Load):取指令,常开触点逻辑运算开始。 LDN(Load Not):取反指令,常闭触点逻辑运算开始。
值
丢失;每一次进行出栈操作,栈顶值弹出,栈底值补进随机
数。
电气控制与PLC原理及应用(第2版)
逻辑堆栈指令主要用来完成对触点进行的复杂连接,主 要作用是用于一个触点(或触点块)同时控制两个或两个以 上线圈的编程,逻辑堆栈指令无操作数(LDS例外)。 逻辑堆栈指令主要包括逻辑推入栈指令 LPS、 逻辑读 栈指令 LRD、 逻辑出栈指令LPP。
电气控制与PLC原理及应用(第2版)
STL
LAD
功
能
操 作 元 件
EU(Edge Up)
——| P |——( )
上升沿微分输出
无
ED(Edge Down)
第五章 PLC的基本指令及程序设计
(4)RI,立即复位指令
用立即复位指令访问输出点时,从指令
所指出的位(bit)开始的N个(最多为 128个)物理输出点被立即复位,同时, 相应的输出映像寄存器的内容也被刷新。 用法: RI bit, N 例: RI Q0.0,1 应用举例:
LD = =I SI
I0.0 //装入常开触点 Q0.0 //输出触点,非立即 Q0.1 //立即输出触点 Q0.2, 1 //从 Q0.2 开始的 1 个 //触点被立即置 1
图5.4 LPS,LRD,LPP指令的操作过程
逻辑推入栈 逻辑读栈 逻辑弹出栈
前 iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7 iv8
后 iv0 iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7
前 iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7 iv8
T32,T96 T33~T36,T97~T100 T37~T63,T101~T255
3. 定时器指令格式
TON
通电延时型
TONR 有记忆通电延时型
TOF 断电延时型 IN—使能输入端;编程范围T0~T255; PT是预置值输入端,最大预置值32767;PT 数据类型:INT。PT寻址范围见附表1。
NETWORK 1 LD I0.0 S Q0.0, 1 NETWORK 5 LD I0.1 R Q0.0, 1
I0.0 I0.1 Q0.0
5.1.4 边沿触发指令(脉冲生成)
用途:边沿触发是指用边沿触发信号产生一个机器周 期的扫描脉冲,通常用作脉冲整形。 分类:边沿触发指令分为正跳变触发(上升沿)和负 跳变触发(下降沿)两大类。 正跳变触发指输入脉冲的上升沿,使触点ON一 个扫描周期。负跳变触发指输入脉冲的下降沿,使触 点ON一个扫描周期。 EU(Edge Up)正跳变, 无操作元件 ED(Edge Down)负跳变, 无操作元件
FX5U PLC的应用指令及应用
Page: 37
五、结构化指令
• FOR~NEXT指令
示例
X0=1,执行 CJ指令
Date: 2023/8/25
Page: 38
五、结构化指令
• 指令应用示例
控制 要求
用X0、X1控制Y0输出,当X1X0=00时,Y0为 OFF ; 当 X1X0=01 时 , Y0 以 1.2s 周 期 闪 烁 ; 当 X1X0=10时,Y0以3s的周期闪烁;当X1X0=11时, Y0为ON。
• 编程练习
[任务实施]
Date: 2023/8/25
Page: 21
四、程序流程控制指令
• 程序分支指令
该类指令用于用于执行同一程序文件内指定的指针
指令 属性
编号的程序,可以缩短周期扫描时间。CJ是连续执 行指令、CJP是脉冲执行指令,(P)是跳转目标的指 针编号;CJ(P)跳转的目标是指针(P)编号所指定的
指令 说明
Date: 2023/8/25
Page: 28
四、程序流程控制指令
• 程序执行控制指令
指令 应用
Date: 2023/8/25
程序执行控制指令
指令 应用
Date: 2023/8/25
Page: 30
四、程序流程控制指令
• 程序执行控制指令
指令 应用
Date: 2023/8/25
Page: 35
五、结构化指令
• FOR~NEXT指令
✓ FOR-NEXT指令的重复次数(n)可在1-32767的范围内指
指
定 ; 如 果 指 定 为 (-32768-0) 的 情 况 下 , 将 视 为 与
令
(n)=1相同的处理。
说 ✓ 当不希望执行FOR-NEXT指令之间的处理时,可采用CJ
控制转移类指令
时,计算前应加上FF,即rel=FF90H(带符号扩展)
( 3)形成转移目标地址,
PC=PC+rel=2002+FF90H
=1F92H,向2000H前转移
解 6: (1)产生当前PC,PC=PC+2=2002H (2)形成转移目标地址,
PC=PC+rel=2002+FFFEH=2000H,
程序在原地踏步。 常写为:SJMP $; $表示0FEH
第3章 MCS-51指令系统
实训3 指令的应用 3.1 简介
3.2 寻址方式
3.3 指令系统
本章小结
习题3
⒌ 循环移位指令(4条)
① 循环左移:RL A 不影响标志位 ② 带Cy循环左移:RLC 影响Cy,P
A
③ 循环右移:RR A 不影响标志位 ④ 带Cy循环右移:RRC 影响Cy,P A
二进制数的特点:左移一位增大一倍,右移一 位减少一半。 在汇编语言程序中,通常用带CY(CY=0)循环 左移实现乘2操作,通常用带CY(CY=0)循环右移 实现除以2操作。
例3 某已知数存在R4中,试将其乘以2存在R3 中,除以2存在R2中。
编程如下:
CLR C MOV RLC MOV CLR MOV RRC A MOV R2,A A,R4 A R3,A C A,R4
3.3.5 控制转移类指令 控制转移类指令的本质是改变程序计数器PC的内容, 从而改变程序的执行方向。控制转移类指令分为:无条 件转移指令、条件转移指令及调用和返回指令。
四、控制转移类指令
长转移指令(1 条):LJMP 无条件转 移指令 绝对转移指令(1 条):AJMP 相对转移指令(1 条):SJMP 间接寻址的无条件转移指令(1 条):JMP 控制转移 类指令 累加器 A 判 0 指令(2 条):JZ、JNZ 条件转移 比较转移指令(4 条):CJNE 减 1 非零转移指令(2 条):DJNZ 长调用指令(1 条):LCALL 调用和返 回指令 绝对调用指令(1 条):ACALL 返回指令(2 条):RET、RETI 空操作指令(1 条):NOP
fx5u基本指令运用
fx5u基本指令运用摘要:1.FX5U 简介2.FX5U 基本指令3.指令运用实例4.总结正文:一、FX5U 简介FX5U 是一款可编程序控制器(Programmable Logic Controller,简称PLC),广泛应用于工业自动化控制领域。
它是三菱PLC 的一种,具有性能稳定、操作简便、扩展性强等特点。
在各种工业控制场合,如生产线、机器人控制、设备监控等,都能看到FX5U 的身影。
二、FX5U 基本指令FX5U 的基本指令包括以下几类:1.输入/输出指令:这类指令主要用于读取或输出传感器和执行器的信号,如X0、Y0等。
2.逻辑指令:这类指令主要包括与、或、非等运算,用于实现逻辑判断和运算,如AND、OR、NOT 等。
3.计时/计数指令:这类指令用于实现计时和计数功能,如TMR、CNT 等。
4.移位指令:这类指令用于实现数据的移位操作,如SHL、SHR 等。
5.比较指令:这类指令用于比较两个数值的大小,如CMP 等。
6.流程控制指令:这类指令主要用于实现程序的跳转和循环,如JMP、JNZ、FOR 等。
三、指令运用实例以一个简单的自动灯控系统为例,介绍FX5U 基本指令的运用:1.输入/输出指令:使用X0表示门的开关状态,Y0表示灯的状态。
当门打开时,X0为ON,灯点亮;门关闭时,X0为OFF,灯熄灭。
2.逻辑指令:使用AND 指令判断门是否打开。
当X0 为ON 时,AND 指令输出为ON,表示门已打开;当X0 为OFF 时,AND 指令输出为OFF,表示门未打开。
3.计时/计数指令:使用TMR指令实现计时功能,设定开门时长。
例如,设置开门时长为1分钟,当计时结束后,自动关闭门,灯熄灭。
4.流程控制指令:使用JMP 指令实现程序跳转,当计时结束时,程序跳转至灯熄灭的程序段;使用FOR 指令实现循环,使程序在满足条件时反复执行。
四、总结通过以上实例,可以看出FX5U 基本指令在实际应用中的重要性。
5-FANUC常用指令G50、对刀、螺纹指令)
二、螺纹切削固定循环指令(G92) 螺纹切削固定循环指令
1.圆柱螺纹的指令格式 : G92 X(U) .
Z(W)
F ;
X、Z指定螺纹终点的坐标值; 、 指定螺纹终点的坐标值 指定螺纹终点的坐标值; U、W为螺纹终点相对于循环起点的增量值; 为螺纹终点相对于循环起点的增量值; 、 为螺纹终点相对于循环起点的增量值 F为 螺纹的螺距。 为 螺纹的螺距。
φd
O L (a) 确定刀尖在 向的位置 确定刀尖在Z向的位置
O
(b) 确定刀尖在 向的位置 确定刀尖在X向的位置
图3-3 数控车床的对刀 5-3 根据试切后工件的尺寸确定刀尖的位置。 根据试切后工件的尺寸确定刀尖的位置。
复习相关知识
3、♣. 倒角与倒圆(教材 、 倒角与倒圆(教材P33)
图 G01指令倒角 指令倒角
♣. 倒角与倒圆(教材 倒与倒圆(教材P33)
图 G01指令倒圆 指令倒圆
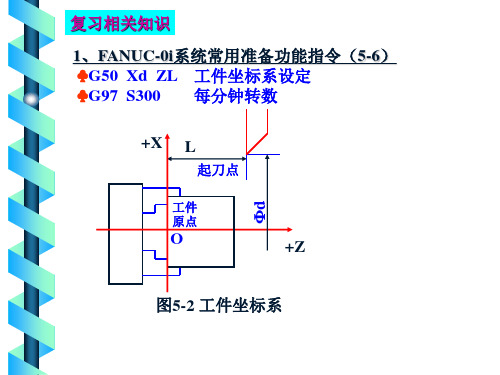
表2-1与坐标设定有关的指令 与坐标设定有关的指令
代码 G50 G52 G53 G54 G55 G56 G57 G58 G59 功 能 坐标设定或最高限速 局部坐标系设定 机床坐标系选择 选择工件坐标系1 选择工件坐标系 选择工件坐标系2 选择工件坐标系 选择工件坐标系3 选择工件坐标系 选择工件坐标系4 选择工件坐标系 选择工件坐标系5 选择工件坐标系 选择工件坐标系6 选择工件坐标系 代码 G17 G18 G19 功 能 选择XY平面 选择 平面 选择ZX平面 选择 平面 选择YZ平面 选择 平面
M30; 程序结束 ;
圆锥螺纹, x 圆锥螺纹 螺纹外径已加工完成,起刀点( , ) 例题 M30xl.5.圆锥螺纹,螺纹外径已加工完成,起刀点(100,100) 利用单一螺纹指令(G32)编写加工程序。 编写加工程序。 利用单一螺纹指令 编写加工程序 G50 X100.0 Z100.0; ; G97 S300; ; T0101 M03; ; G00 X29.2 Z5.0;第一进刀点 ; G32 X49.2 Z-33.0 F1.5;切削 ;切削1 G00 X52.0; 提刀 ; Z5.0; 定位 ; X28.6;第二进刀点 ; G32 X48.6 Z-33.0 F1.5 ;切削 切削2 G32 X48.05 Z-33.0 F1.5 切削 次 切削4次 G00 X52.0; 提刀 . ; G00 X52.0 ;提刀 Z5.0 ; 定位 Z5.0; 定位 . ; X28.04; 第五进刀点 X28.2; 第三进刀点 . ; G32 X48.05 Z-33.0; 切削 次(无进给光整 无进给光整) . ; 切削5次 无进给光整 G32 X48.2 Z-33.0 F1.5 切削 次 切削3次 G00 X52.0; 提刀 . ; G00 X52.0; 提刀 ; X100.0 Z100.0; 刀具快速返回起刀点 . . ; T0100 M05; 取消刀具补偿,主轴停转 Z5.0; 定位 ; 取消刀具补偿, ; M30; 程序结束 ; X28.04; 第四进刀点 ;
AB的PLC指令简介.doc

AB的PLC指令简介.doc指令系统A-B PLC具有丰富的指令系统(约有110多条指令),虽然不同系列的PLC所能支持的指令的种类有所区别,但一些基本指令却是大家共用的,下面主要介绍PLC-5系列可编程序控制器的指令类型。
1、继电器指令继电器指令用于监控数据表中的位状态,如输入位或者计时器控制字的位,继电器型指令包括:检查通(XIC);检查断(XIO);输出激励(OTE);输出锁存(OTL);输出解锁(OTU);立即输入(IIN);立即输出(IOT)。
2、计时器/计数器指令计时器和计数器指令用于控制基于时间和事件计数的操作,包括:通延时计时器(TON);断延时计时器(TOF);保持型计时器(RTO);加计数(CTU);减计数(CTD);计时器/计数器复位(RES)。
3、比较指令比较指令用于比较表达式或指定比较指令的值,它包括:比较(CMP);等于(EQU);大于等于(GEQ);大于(GRT);小于等于(LEQ);小于(LES);极限测试(LIM);屏蔽相等比较(MEQ);不等于(NEQ)。
4、计算指令计算指令用于计算表达式或用指定的算术指令进行算术运算,它包括:计算(CPT);乘法(MUL);取反(NEG);正弦(SIN);平方根(SQR);排序(SRT);减法(SUB);正切(TAN);反正弦(ASN);反余弦(ACS);对数(LOG);自然对数(LN);除法(DIV);余弦(COS);清零(CLR);平均值(AVE);反正切(ATN);加法(ADD);标准差(STD);X的Y次幂(XPY)。
5、逻辑指令逻辑指令用于逻辑操作,包括:与操作(AND);非操作(NOT);或操作(OR);异或操作(XOR)。
6、转换指令转换指令用于整数与BCD之间的相互转换及度与弧度之间的相互转换,包括:整数转换成BCD码(TOD);从BCD码转换成整数(FRD);弧度转换成度(DEG);度转换成弧度(RAD)。
第三章S7-200PLC基本指令二

如果IN是以角度值表示的实数,要先将角度值转化为 弧度值。方法:用实数乘法指令×R,用角度值乘以π/180
即可。
6)正切函数(TAN)
TAN指令的功能是求1个双字长(32位)的实数弧度值IN
的正切值,得到32位的实数结果OUT。
操作数 IN
ห้องสมุดไป่ตู้
类型 REAL
寻址范围 VD, ID, QD, MD, SD, SMD, LD, AC, *VD, *AC, *LD和常数
IN1,OUT
4.除法指令—对两个有符号数进行相除运算
DIV-I DIV-DI DIV-R DIV
EN ENO IN1 IN2 OUT
EN ENO IN1 IN2 OUT /D IN2,OUT
EN ENO IN1 IN2 OUT /R IN2,OUT
EN ENO IN1 IN2 OUT DIV IN2,OUT
第三章 S7-200PLC基本指令
主讲:李宏伟
3、关系运算指令 4、数学运算指令 5、数据处理指令 6、程序控制指令
第三节 关系运算指令
关系运算是通过比较指令来实现的,比较指令为上、
下限控制提供了方便,比较指令实际上是一个比较触点, 用于两个相同数据类型的有符号数或无符号数IN1和IN2的
比较判断操作。
2、逻辑“或”指令
ORB IN1,OUT 字节“或”
ORW IN1,OUT 字“或”
ORD IN1,OUT 双字“或”
逻辑“或”指令是对两个输入端(IN1、 IN2)的数据 按位“或”,结果存入OUT单元。在STL中IN2与OUT为同 一存储单元。
3、逻辑“异或”指令
XORB IN1,OUT 字节“异或”
COS指令的功能是求1个双字长(32位)的实数弧度
第2章 80X86汇编语言与汇编程序(4)—串操作与程序控制指令
DI,200H CX,128 AX,AX STOSW
当然也可以用字节填充 可以使用重复前缀。 当寄存器AL、AX中的数不变 BBB: CLD LEA DI,0500H 时,使用重复前缀,则是对 某一RAM区域进行填充。 MOV CX,256 例如上电复位后,对某一块内 XOR AL,AL 存区域全部填充0 REP STOSB
GLUT_C 2013-08 25
④ 段间直接转移
格式: JMP FAR PTR dst 功能:用dst给出的段内偏移量代替IP,用dst的段地址代替 CS的内容,转移到新的CS: 偏移地址去执行下一条指令。 注意:在汇编语言程序设计中,dst通常使用符号地址。
例如:
MOV JMP AX, [SI] FAR PTR ABCD
GLUT_C
2013-08
8
例:比较1000:0e00H与1000:0400H连续8字节是否相等,只要有 一个不相同的字节,则设置AL=0A5H表示两个字符串不想等,否 则赋值AL=00H。
CMP_S: MOV MOV MOV MOV MOV CLD MOV REPZ JNZ MOV JMP DONE: MOV CMP_END: RET
8086指令系统(续)
GLUT_C
2013-08
1
2.3.5
串操作指令
串操作指令在教材P.128 字符串传送指令 字符串比较指令 字符串检索指令 取字符串指令 存字符串指令
GLUT_C
2013-08
2
1.字符串传送指令 字符串传送指令MOVSB/MOVSW 格式: MOVSB ;用于字节传送 MOVSW ;用于字传送。 特点: ( 1 ) MOVSB 、 MOVSW 指令,源数据串的默认段 基址 DS ,有效地址为 SI ,目的串段基址 ES ,有效 地址DI。 (2)指令前面常加重复前缀REP,重复执行n次。 (3)重复执行次数 由CX指定 (4)每次传送,DI,SI自动修改(字节传送±1,字 传送±2),加减由方向控制为DF确定。
S7-300 PLC第5章 控制指令与顺序控制

4.多流程 如图5-7c所示,一个顺序控制任务,如果存在多个 相互独立的工艺流程,则需要采用多流程设计,这 种结构主要用于处理复杂的顺序控制任务。
5.2.4 顺序功能图的编程
顺序功能图的每一步用梯形图编程时都需要用 两个程序段来表示,第1个程序段实现从当前 步到下一步的转换,第2个程序段实现转换以 后的步的功能。
…… //完成循环后,在此继续执行程序扫描。
5.1.2 程序控制指令
程序控制指令是指功能块(FB、FC、SFB、 SFC)调用指令和逻辑块(OB,FB,FC)结束指 令。调用块或结束块可以是有条件的或是无条 件的。
CALL指令可以调用用户编写的功能块或操作系统提 供的功能块,CALL指令的操作数是功能块类型及其 编号,当调用的功能块是FB块时还要提供相应的背 景数据块DB。使用CALL指令可以为被调用功能块中 的形参赋以实际参数,调用时应保证实参与形参的 数据类型一致。
5.1 控制指令
5.1.1 逻辑控制指令 1. 无条件跳转指令 无条件跳转指令JU执行时,将直接中断当前的
线性程序扫描,并跳转到由指令后面的标号所 指定的目标地址处重新执行线性程序扫描。 STL 形式的无条件跳转指令格式:JU<跳转标 号> LAD形式的无条件跳转指令格式:
注意:LAD形式的无条件跳转指令,直接连接到最左 边母线,否则将变成条件跳转指令
3. 条件跳转指令 条件跳转指令是根据状态位或前一条指令的执行结
果与0的关系,来决定是否跳转。
指令 JC JCN JCB JNB JBI
JNBI JO JOS
表5-1 条件跳转指令的格式及说明
说明 当RLO=1时,跳转
当RLO=0时,跳转
当RLO=1时,且BR=1时 跳转
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序控制指令
程序控制指令简介
格式 LAD
跳转指令
程序控制指令的LAD和STL格式
名 反跳转指令
称 标签指令
返回指令
功能
逻辑运算结果为1 ,则程序将指定 标签后的第一条 指令开始执行
逻辑运算结果 为0,则程序将 指定标签后的 第一条指令继
续执行
JMP或JMPN跳 转指令的目标标
签
用于终止当前的 执行
程序控制指令是指程序中跳转指令, 若没有执行控制指令之前,程序进行 线性扫描,按照先后顺序执行。程序 在执行控制指令之后,可以跳转到所 指定的程序段去执行,并从该程序段 的标签入口处继续线性扫描。
程序控制指令
JMP指令简介
跳 转 指 令 ( JMP ) , 输 入 的 逻 辑 运 算 结 果 (RLO)的状态为1,则中断程序的顺序执行, 并跳转到其他程序段继续执行。跳转的目标 程序段必须用跳转标签(LABEL)进行识别, 在该跳转执行程序的左上方指定标签名称。
谢谢观看
JMPN的主要不同点??
程序控制指令
JMP_LIST功能介绍
使用“定义跳转列表”指令,可定义多个有条件跳转,并继续执行由K参 数的值指定的程序段中程序。
ห้องสมุดไป่ตู้
程序控制指令
SWITCH指令
“跳转分支指令”指令( SWITCH)也与LABEL指令配合使用,根据比较结果,定义要执行的 程序跳转。在指令框中为每个输入选择比较类型(==、<>、>=、<=、>、<),该指令从第 一个比较开始执行,直至满足比较条件为止。
程序控制指令
SWITCH指令
在指令框中为每个输入选择比较类型(==、<>、>=、<=、>、<),该指令从第一个 比较条件开始判断,直至满足比较条件为止。如果满足比较条件,则将不考虑后续比 较条件,从该条件所对应输出端的标签下去执行。如果未满足任何指定的比较条件, 将在输出 ELSE 处执行跳转。如果输出 ELSE 中未定义程序跳转,则程序从下一个程 序段继续执行。