现场动平衡的原理及分离解算
动平衡的概念和原理

动平衡的概念和原理嘿,朋友!您知道啥是动平衡不?这玩意儿可重要啦!想象一下,您骑着一辆自行车,如果车轮歪歪扭扭,那您能骑得稳当吗?估计一路上得摔不少跟头!这就好比机器里的旋转部件,如果不平衡,那麻烦可就大了。
动平衡呢,简单来说,就是让旋转的物体在转动时保持平稳,不晃悠、不抖动。
您看那高速旋转的车轮,要是一边重一边轻,转起来是不是就跟喝醉了酒似的?动平衡就是要让它清醒过来,稳稳地转。
那为啥要搞动平衡呢?您想想,汽车的轮子要是不平衡,跑起来不仅颠簸,还会磨损轮胎,影响驾驶安全,这多吓人啊!再比如说飞机的发动机涡轮,那转速多高啊,如果不平衡,好家伙,这飞机还不得在空中打哆嗦?动平衡的原理,其实就像咱们挑担子。
担子两边重量差不多,咱挑着就轻松平稳。
旋转的物体也一样,要让它各个部分的质量分布均匀,重心在旋转轴上,这样转动起来才顺畅。
比如说一个风扇的叶轮,如果有一部分偏重了,那在转动的时候,偏重的那部分产生的离心力就大,整个风扇就会晃悠。
这离心力就像是个调皮的孩子,非要把不平衡的物体拉得东倒西歪。
为了实现动平衡,工程师们可有不少办法。
他们会先测量旋转物体的不平衡量,就像给病人量体温一样,找出问题所在。
然后呢,根据测量结果,在偏重的地方加上或者减去相应的质量,就像给担子调整重量一样。
这过程可不简单,得精细得很!稍微有点差错,那可就前功尽弃啦。
您说这是不是得有十足的耐心和高超的技术?总之,动平衡对于各种旋转机械来说,那可是至关重要的。
没有它,咱们的生活可就没那么方便和安全啦。
所以,可别小看了这动平衡,它可是保障咱们生活正常运转的小卫士呢!。
现场动平衡
现场动平衡什么是现场动平衡现场动平衡,也被称为动平衡校正,是一种用于旋转机械设备的校正技术。
旋转机械设备在运行过程中,由于不可避免的制造误差、磨损、装配不准确等因素,会产生不平衡的力矩,从而导致振动和噪音。
现场动平衡就是通过测量和分析,找到不平衡的原因和位置,并采取相应的校正措施,使设备恢复平衡运行状态。
现场动平衡的重要性现场动平衡在工业生产中具有重要的意义。
不平衡的旋转机械设备会引起振动和噪音,不仅对设备本身造成损害,而且还会对周围环境和工作人员的健康造成影响。
通过现场动平衡技术,可以有效减少设备的振动和噪音,延长设备的使用寿命,提高设备的可靠性和运行效率。
现场动平衡的原理现场动平衡的实现基于以下原理:1.不平衡力矩与振动的关系:旋转机械设备产生的振动主要来自不平衡的力矩。
当设备不平衡时,产生的力矩会使设备发生振动。
2.振动的分析与测量:通过振动分析和测量技术,可以确定设备的振动频率、幅度和相位等信息,从而找到设备的不平衡位置。
3.平衡校正:根据振动测量结果,可以确定不平衡位置和大小。
通过在设备上添加校正质量,可以抵消不平衡力矩,实现设备的平衡运行。
现场动平衡的步骤现场动平衡一般包括以下步骤:1.振动测量:使用振动测量仪器,对设备进行振动测量,获取振动频率、幅度和相位等相关参数。
2.数据分析:对振动测量数据进行分析,确定设备的不平衡位置和大小。
3.校正方案设计:根据数据分析结果,设计相应的校正方案,包括校正质量的大小和位置。
4.校正质量制备:根据校正方案,制备相应的校正质量。
5.校正质量安装:将校正质量安装在设备上,根据设计的位置进行安装。
6.重新振动测量:安装完成后,再次进行振动测量,以验证设备的平衡状态。
7.记录和报告:记录校正过程中的相关数据和测量结果,并生成报告,以供后续参考。
现场动平衡的工具和设备现场动平衡需要使用以下工具和设备:1.振动测量仪:用于对设备进行振动测量,获取振动参数。
转子动平衡的基本原理及现场动平衡技术

转子动平衡的基本原理及现场动平衡技术一不平衡问题种类为了以最少的启停次数,获得最佳的平衡效果,我们不仅要认识到动不平衡问题的类型(静不平衡、力偶不平衡、动不平衡),而且还要知道转子的宽径比及转速决定了采用单平面、双平面还是多平面进行动平衡操作。
同时也要认识到转子是挠性的还是刚性的。
刚性转子与挠性转子对于刚性转子,任何类型的不平衡问题都可以通过任选的二个平面得以平衡。
对于挠性转子,当在一个转速下平衡好后,在另一个转速下又会出现不平衡问题。
当一个挠性转子首先在低于它的70%第一监界转速下,关注修心养身密码,学习安全和养生知识,在它的两端平面内加配重平衡好后,这两个加好的配重将补偿掉分布在整个转子上的不平衡质量,如果把这个转子的转速提高到它的第一临界转速的70%以上,这个转子由于位于转子中心处的不平衡质量所产生的离心力的作用,而产生变形,如图10所示。
由于转子的弯曲或变形,转子的重心会偏离转动中心线,而产生新的不平衡问题,此时在新的转速下又有必要在转子两端的平衡面内重新进行动平衡工作,而以后当转子转速降下来后转子又会进入到不平衡状态。
为了能在一定的转速范围内,确保转子都能处在平衡的工作状态下,唯一的解决办法是采用多平面平衡法。
挠性转子平衡种类1.如果转子只是在一个工作转速下运转,小量的变形不会产生过快的磨损或影响产品的质量,那么可以在任意二个平面内进行平衡,使轴承的振动降低到最小即可。
2.如果一个挠性转子,只是在一个工作转速下工作,但是将转子的变形量降低到最小是极其重要的,这时最好采用多平面动平衡修正。
3.如果一个转子必须在一个宽广的转速范围内都能平稳地工作,即该转子在低转速时是刚性的,在高转速时是挠性的,这时最好采用多平面动平衡修正。
临界转速当转子的转速达到自身产生弯曲共振时的转速,称为临界转速。
转子经过临界转速时,关注修心养身密码,学习安全和养生知识,转子产生的弯曲振型数,取决转子转速与转子自振频率相一致的数量。
动平衡原理说明

动平衡原理说明
嘿,朋友们!今天咱来唠唠动平衡原理。
你说这动平衡啊,就好像是一场精彩的舞蹈表演!
想象一下啊,一个旋转的物体,要是不平衡,那会咋样?就跟跳舞的时候脚步不稳一样,会摇摇晃晃,甚至可能摔倒呢!动平衡呢,就是要让这个物体稳稳当当的,能流畅地转起来。
咱生活里到处都有动平衡的影子呢!就说那汽车轮子吧,要是不平衡,你开车的时候就会感觉车子一抖一抖的,多不舒服呀!这时候就得给轮子做动平衡啦,加上合适的配重,让它能顺顺溜溜地跑起来。
再看看那些大型的机器设备,要是不平衡,那噪音能吵死人,还可能影响机器的寿命呢!所以啊,动平衡对于它们来说可太重要了。
这不就跟咱人一样嘛,身体要平衡才能走得稳,做事也得心里平衡才能顺顺当当呀!不平衡的时候就容易出乱子,对吧?
动平衡的原理其实也不难理解。
就是要找到物体不平衡的地方,然后想办法让它平衡起来。
就好像你挑担子,一边重一边轻可不行,得调整调整,让两边一样重,这样挑起来才轻松嘛。
而且哦,动平衡可不是一次就搞定的事儿。
就像你学跳舞,也不是一天就能跳得很好呀,得不断练习,不断调整。
有时候做了一次动平衡,过段时间可能又不平衡了,还得再来一次。
你说这动平衡是不是很神奇?它能让那些旋转的东西变得乖乖的,服服帖帖的。
咱可得好好了解了解它,说不定啥时候就能用上呢!
动平衡啊,就像是一个默默工作的小卫士,守护着那些旋转的物体,让它们能正常工作,为我们服务。
要是没有它,那得多乱套呀!
所以啊,咱可别小瞧了动平衡原理,它在我们生活中可有着大用处呢!不管是小小的玩具,还是大大的机器,都离不开它呀!你说是不是呢?。
动平衡机的原理及分离解算
动平衡机的原理及分离解算有些回转体系统体积巨大,以至于没有合适的动平衡机能支承运行;有些小厂不具备利用动平衡机进行平衡的工作条件;有些回转体的工作环境为高热或高电磁场等,由于热变形或磁滞伸缩变形等,使在动平衡机上已达到的平衡遭到破坏;又由于运输或维修等原因,需要对平衡好的回转体重新进行组装;所有这些情况,均需要进行现场动平衡解决。
现场动平衡可以包括进行单面静平衡及对柔性回转体的动平衡。
进行静平衡的方法很简单,首先在回转体附加支承处(最好离校正面距离最短),振动较大的方向(通常为水平方向)上,安置传感器,并接通一个测振仪,启动回转体至工作转速下记录振动响应的大小,高读数为X,对应着被测的不平衡量U,并存在关系式U=kx,对于刚性回转体而言,在固定的转速下,不论是硬支承还是软支承,k一定是个常数,所以也一定存在矢量关系式U=kx。
为求出矢量x的角度(或相位)可采用转们两次法进行测量计算。
即在回转体半径为R(mm) 任意位置上,安置一块校验质量M(g),然后启动回转体至相同的转速下,记录此时的振动响应,高读数为x1,显然,x1为原不平衡量U及校验不平衡量U1=MR共同作用产生的,即kx1=U+Ut.将校验质量M(g)转位180º,重新安置后再次启动回转体至相同转速下,记录此时的振动响应,高读数为X2,应有kx2=U-Ut,因而利用图解的方法,很容易求解矢量方程。
对于需要进行双面平衡的回转体,应使用能测量相位的现场动平衡测试仪器,因而需要在回转体上设置其准信号发生器,常用光电式,也有使用由支承处的振动信号触发的同步闪光灯,由于人眼的视觉暂停现象,会学得观察到的回转体,处于静止状态。
需要预先在校正面上设置了0°,90°,180°…等角度标记,便可在同步内光的情况下,便可以观察出设置的0°角度标记与某固定位置(例如水平方向)之间的夹角了。
有了其准信号,能确定支承处振动响应的复振幅XL及XR,便可按系数影响法计算不平衡量的大少了。
动平衡测试原理

动平衡测试原理动平衡测试是一种常用于检测旋转机械设备平衡性能的方法。
它通过测量旋转部件在转速下的振动情况,评估设备是否存在不平衡,并确定不平衡位置和大小。
本文将介绍动平衡测试的原理及其应用。
一、动平衡测试概述动平衡测试是一种动态测试方法,用于检测旋转机械设备在运行状态下的平衡性能。
通过测量设备的振动情况,可以判断设备是否存在不平衡,并确定不平衡的产生原因。
动平衡测试不仅能够提高设备的运行稳定性和寿命,还可以减少设备对周围环境产生的振动和噪音。
二、动平衡测试原理动平衡测试原理基于质量守恒定律和力矩平衡原理。
当旋转机械设备不平衡时,其质量中心与旋转轴的几何中心不重合,会在旋转过程中产生离心力和离心力矩。
这些力和力矩会导致设备的振动,进而影响设备的稳定性和工作效率。
动平衡测试通过将旋转机械设备与测量仪器连接,测量设备在不同转速下的振动情况。
通过对得到的振动信号进行分析和处理,可以计算出设备的不平衡量,并确定不平衡的位置和大小。
在实际测试中,通常会使用动平衡仪或振动分析仪等专用设备进行测试。
三、动平衡测试方法1. 单面平衡法:单面平衡法是一种常用的动平衡测试方法,适用于对一侧不平衡的设备进行测试。
该方法先将设备启动至工作转速,然后通过在旋转轴上加上适量平衡质量,使设备在转动过程中减少振动,最终达到平衡状态。
2. 双面平衡法:双面平衡法适用于对两侧不平衡的设备进行测试。
该方法需要在旋转轴的两侧分别加上适量平衡质量,使设备在转动过程中减少振动,最终达到平衡状态。
3. 动平衡仪辨识法:动平衡仪辨识法是一种先进的动平衡测试方法。
该方法利用动平衡仪的高灵敏度和高精度,可以实时监测设备的振动情况,并根据振动信号反馈进行平衡调整。
通过不断调整平衡质量的位置和大小,最终实现设备的平衡状态。
四、动平衡测试的应用动平衡测试广泛应用于各种旋转机械设备的制造、维修和运行过程中。
具体应用领域包括:1. 发动机制造和维修:动平衡测试可以用于发动机的制造和维修过程中,保证发动机的平衡性能,提高其工作效率和寿命。
动平衡的方法

动平衡的方法动平衡是指在一定条件下,物体的受力平衡状态随着时间的推移而发生变化的情况。
在工程实践中,我们经常会遇到需要解决动平衡问题的情况,因此研究动平衡的方法对于工程设计和实施具有重要意义。
首先,要了解动平衡的基本原理。
动平衡的基本原理是根据牛顿第二定律,物体的受力平衡状态取决于物体所受的外力和物体的质量、形状等因素。
当外力或物体的质量、形状发生变化时,物体的受力平衡状态也会发生变化,从而导致动平衡问题的产生。
接下来,我们需要掌握动平衡的方法。
动平衡的方法主要包括静平衡和动平衡两种。
静平衡是指物体在静止状态下的受力平衡状态,而动平衡则是指物体在运动状态下的受力平衡状态。
在实际工程中,我们通常会通过调整物体的质量分布、形状等因素来实现动平衡。
在实际应用中,我们可以采用以下方法来实现动平衡。
首先,可以通过增加或减少物体的质量来调整物体的受力平衡状态。
其次,可以通过改变物体的形状或结构来实现动平衡。
此外,还可以通过增加减少外力的作用来实现动平衡。
总之,通过对物体的质量、形状、外力等因素进行调整,我们可以实现动平衡。
除此之外,还有一些专门的动平衡设备和方法可以帮助我们实现动平衡。
例如,动平衡机可以通过旋转测试来检测物体的动平衡状态,并通过加重或去重来实现动平衡。
此外,还有一些数学模型和计算方法可以帮助我们分析和解决动平衡问题。
在工程实践中,为了实现动平衡,我们需要综合考虑物体的质量、形状、外力等因素,采用合适的方法和工具来进行调整和优化。
通过科学的分析和实践,我们可以有效地解决动平衡问题,确保物体在运动状态下的受力平衡状态,从而保证工程的安全和稳定运行。
综上所述,动平衡是工程设计和实施中需要重视的问题,我们需要深入理解动平衡的基本原理,掌握动平衡的方法,并结合实际情况采取合适的措施来实现动平衡。
只有这样,我们才能确保工程的安全和稳定运行,实现预期的效果。
动平衡仪原理

动平衡仪原理动平衡仪是一种用于检测和修正旋转机械设备不平衡状态的仪器,它在工业生产中起着至关重要的作用。
了解动平衡仪的原理对于正确使用和维护设备至关重要。
本文将介绍动平衡仪的原理,帮助读者更好地理解这一设备的工作原理。
动平衡仪的原理主要基于动力学平衡原理。
在旋转机械设备中,由于零件制造和安装过程中的误差,以及在使用过程中的磨损等因素,往往会导致设备产生不平衡状态。
这种不平衡状态会导致设备产生振动,影响设备的使用寿命和性能。
因此,需要通过动平衡仪来检测和修正这种不平衡状态。
动平衡仪的工作原理主要包括两个方面,一是振动测量,二是质量补偿。
在振动测量方面,动平衡仪通过传感器等装置来检测设备的振动情况,包括振幅、频率等参数。
通过这些参数的测量,可以准确地判断设备的不平衡状态。
在质量补偿方面,动平衡仪则通过添加或移除质量来实现设备的平衡。
通过在设备上添加或移除质量,可以改变设备的质量分布,从而达到平衡状态。
动平衡仪的原理基于振动学和力学原理,其核心在于通过测量和调整设备的质量分布,使得设备在旋转时不产生振动。
这不仅可以提高设备的使用寿命和性能,还可以保障生产安全和产品质量。
除了上述的原理外,动平衡仪还涉及到一些相关的知识,比如传感器技术、信号处理技术、控制技术等。
这些知识对于动平衡仪的设计和制造都至关重要。
传感器技术可以帮助动平衡仪准确地测量设备的振动情况,信号处理技术可以对传感器采集到的信号进行处理和分析,控制技术则可以帮助动平衡仪实现自动化操作。
总之,动平衡仪的原理是基于振动学和力学原理的,通过测量和调整设备的质量分布,使得设备在旋转时不产生振动。
了解动平衡仪的原理对于正确使用和维护设备至关重要,也有助于读者更好地理解这一设备的工作原理。
希望本文能够帮助读者更好地理解动平衡仪的原理,进而更好地应用和维护设备。
动平衡实验的实验原理
动平衡实验的实验原理
动平衡实验是一种测定物体质量的实验方法。
该实验基于质量守恒定律和杠杆原理。
实验原理如下:首先,将一个悬挂子弹秤的恒称放置在水平台上,并进行校准,使其示数为零。
然后,在弹秤的两侧分别放置待测物体和标准物体。
调整标准物体的数量,使得弹秤平衡,即示数恢复到零。
根据质量守恒定律,待测物体和标准物体的质量之和等于平衡时标准物体的质量。
因此,我们可以通过这种方法间接地测量待测物体的质量。
在进行动平衡实验时需要注意以下几点:
1. 确保实验台水平,以确保杠杆原理能够正常应用。
2. 所采用的杆材料应坚固且质量较轻,以减小外来因素对实验的影响。
3. 实验环境要尽量稳定,避免空气流动或其他干扰因素引起的示数误差。
4. 实验前应先校准弹簧秤,确保其示数准确。
通过动平衡实验,我们可以使用简单的杠杆原理来测量待测物体的质量,而无需直接测量。
这种实验方法具有简单、直观、精确等特点,在教学和实际应用中得到广泛使用。
动平衡的原理
动平衡的原理动平衡是指在动力学中,系统在外部作用下,物体的平衡状态受到扰动后,会产生一种新的平衡状态。
动平衡的原理是指在外部扰动作用下,系统会通过内部调节,使得系统重新达到平衡状态的一种原理。
动平衡的原理在物理学、工程学等领域都有着重要的应用,下面将详细介绍动平衡的原理及其相关知识。
首先,动平衡的原理可以通过动力学的基本原理来解释。
在动力学中,物体的平衡状态是指物体受到外部作用力后,各部分的受力平衡,从而保持物体整体的静止状态或匀速直线运动状态。
当外部扰动作用于系统后,系统内部会产生相应的反作用力,以抵消外部扰动,使得系统重新达到平衡状态。
其次,动平衡的原理还可以通过能量守恒定律来解释。
在外部扰动作用下,系统内部会产生能量的转化和传递,以使得系统重新达到平衡状态。
例如,当一个物体在外部扰动下产生振动时,系统内部会通过能量的转化和传递来抵消外部扰动,最终达到动平衡状态。
另外,动平衡的原理还与系统的稳定性有关。
在外部扰动作用下,系统会通过内部调节,使得系统重新达到平衡状态,并且系统的稳定性会影响动平衡的实现。
当系统的稳定性较高时,系统会更容易达到动平衡状态,反之则会更难达到动平衡状态。
动平衡的原理在工程学中有着广泛的应用。
例如,在机械系统中,动平衡是保证机械设备正常运行的重要条件之一。
在飞机发动机、汽车发动机等设备中,动平衡的原理被应用于减小振动和噪音,提高设备的工作效率和使用寿命。
在建筑结构中,动平衡的原理也被应用于减小地震、风载等外部扰动对建筑物的影响,保证建筑物的安全性和稳定性。
总之,动平衡的原理是指在外部扰动作用下,系统通过内部调节,使得系统重新达到平衡状态的一种原理。
动平衡的原理可以通过动力学的基本原理、能量守恒定律和系统的稳定性来解释。
动平衡的原理在工程学中有着重要的应用,对于保证机械设备的正常运行和建筑物的安全稳定具有重要意义。
希望通过本文的介绍,读者能够更加深入地了解动平衡的原理及其应用。
动平衡原理与应用

动平衡原理与应用动平衡原理与应用导言:动平衡原理是指在动力学中,任何物体的平衡状态都需要满足动态平衡的条件。
动平衡原理的应用广泛而重要,可以帮助人们理解和解决各种实际问题。
本文将从动平衡原理的概念和基本原理出发,逐步深入探讨其应用,并给出个人观点和理解。
一、动平衡原理的概念与基本原理1. 动平衡原理的概念动平衡原理是指物体在运动过程中保持平衡是通过力的合成等于零来实现的。
它与静力学平衡原理不同,静力学平衡是物体在静止状态下保持平衡的原理。
2. 动平衡原理的基本原理动平衡原理的基本原理包括牛顿第一定律和牛顿第二定律。
牛顿第一定律表明,物体在没有外力作用下要保持匀速直线运动或静止。
牛顿第二定律则告诉我们,物体的加速度与作用力成正比,与质量成反比。
根据这两个原理,可以推导出动平衡原理的数学表达式。
二、动平衡原理的应用1. 动平衡在工程中的应用动平衡在工程中有很多应用,其中最典型的应用是在旋转机械中。
例如,在汽车发动机、飞机发动机和电机等中,由于旋转部件造成不平衡,会引起振动和噪音。
通过动平衡技术可以减小或消除这些振动和噪音,提高机械设备的性能和可靠性。
2. 动平衡在航天领域的应用航天器在发射过程中往往需要经历高速旋转,如果不进行动平衡处理,就会导致严重的振动问题。
因此,动平衡在航天器的设计和制造中起到了至关重要的作用。
通过合理的动平衡技术,可以保证航天器在发射过程中的稳定性和安全性。
3. 动平衡在生活中的应用除了工程和航天领域,动平衡在日常生活中也有一些应用。
例如,电动车轮胎的动平衡调整,可以减小车辆的震动和提高车辆的行驶稳定性。
另外,在摄影领域,相机的镜头镜群也需要进行动平衡处理,以保证拍摄出的照片清晰度和稳定性。
三、总结与回顾动平衡原理是物体在动态平衡状态下保持平衡的原理,它与静力学平衡相对应。
其基本原理包括牛顿第一定律和牛顿第二定律。
动平衡的应用广泛,涵盖了工程、航天和生活等领域。
在工程中,动平衡可以减小机械设备的振动和噪音,提高性能和可靠性;在航天领域,动平衡可以确保航天器的稳定性和安全性;在生活中,动平衡可以提高车辆行驶的稳定性和照片的拍摄质量。
动平衡的原理

动平衡的原理
动平衡是指在动力学系统中,各个部分之间的力和力矩达到平衡状态的原理。
在机械系统中,动平衡是确保机械设备正常运行和安全操作的重要原则。
下面将从动平衡的基本概念、原理和应用等方面进行介绍。
首先,动平衡的基本概念是指在旋转机械中,各个部件的质量和惯性力矩要达到平衡状态。
在动力学系统中,动平衡是指在旋转机械中,通过调整各个部件的质量分布和位置,使得旋转部件在高速旋转时不产生振动和噪音,确保机械设备的正常运行和安全操作。
其次,动平衡的原理是通过调整各个部件的质量和位置,使得旋转部件的质心和转动轴线重合,同时降低旋转部件的不平衡力和不平衡力矩,达到平衡状态。
在实际应用中,可以采用添加平衡块、切割平衡块、平衡轴等方法来实现动平衡。
另外,动平衡的应用范围非常广泛,涉及到各种旋转机械设备,如发动机、风机、离心泵、离心风机、离心离心压缩机等。
动平衡不仅可以提高机械设备的运行效率和使用寿命,还可以减少机械设备的维护成本和故障率,提高机械设备的安全性和稳定性。
总之,动平衡是机械系统中非常重要的原理,它可以确保机械设备的正常运行和安全操作。
在实际应用中,需要根据旋转部件的结构和工作条件,采用合适的动平衡方法和技术,来实现机械设备的动平衡,从而提高机械设备的性能和可靠性。
同时,动平衡也是机械工程领域中的一个重要研究课题,通过不断的研究和实践,可以进一步完善动平衡理论和技术,推动机械设备的发展和进步。
现场动平衡仪 原理
现场动平衡仪原理英文回答:On-Site Dynamic Balancing.On-site dynamic balancing is a process of detecting and correcting unbalance in rotating machinery. It is performed in the field, on the machine itself, rather than in a controlled laboratory environment. This makes it a convenient and cost-effective solution for balancing large or heavy machinery that cannot be easily removed from its operating location.The basic principle of on-site dynamic balancing involves measuring the vibration caused by unbalance and then adding or removing weights from the machine to counteract the vibration. This is typically done using a portable balancing machine, which includes sensors to measure vibration and a computer to analyze the data and calculate the required weight adjustments.The process of on-site dynamic balancing typically involves the following steps:1. Setup: The balancing machine is attached to the machine to be balanced, and the sensors are positioned to measure vibration in both the horizontal and vertical directions.2. Data collection: The machine is run at a specific speed, and the sensors measure the vibration levels. The data is recorded by the computer.3. Analysis: The computer analyzes the vibration data to determine the amount and location of unbalance.4. Weight adjustment: Based on the analysis results, the computer calculates the required weight adjustments. Weights are added or removed from the machine accordingly.5. Verification: The machine is run again at the same speed, and the vibration levels are re-measured. This stepis repeated until the vibration is reduced to an acceptable level.On-site dynamic balancing is a critical maintenance procedure for rotating machinery. It can help to improve machine performance, reduce vibration-related wear and tear, and extend the life of the machine.Requirements:Portable balancing machine.Vibration sensors.Computer for data analysis.Weights for adjusting balance.中文回答:现场动平衡仪原理。
动平衡测试原理

动平衡测试原理
动平衡测试原理是通过在复杂的动力学系统中,采用动力学分析方法来确定系统是否处于平衡状态的一种测试方法。
动平衡测试主要是针对旋转机械系统的动力学平衡进行测定,通过测试能够获得机械系统中的离心力、离心力矩以及轴的动力学平衡状态等参数。
动平衡测试原理的基本思想是通过旋转机械系统产生的不平衡力的振动信号来进行系统平衡状态的判定和修正。
当旋转机械系统处于不平衡状态时,由于离心力的作用,系统会产生振动;而当系统处于平衡状态时,振动信号将最小化。
因此,通过对振动信号的测量和分析,可以确定旋转机械系统的动力学平衡状态。
动平衡测试的基本流程包括以下几个步骤:首先,需要将被测系统与测量设备连接起来,并保证系统能够顺畅运转;然后,通过传感器采集振动信号,将信号输入到测量设备中进行信号处理和分析;接着,根据信号分析结果,判断系统是否处于平衡或不平衡状态,并计算出平衡修正的参数;最后,根据计算出的修正参数,进行相应的平衡调整操作,直到系统达到平衡状态。
值得注意的是,动平衡测试需要在系统运转时进行,以获取真实的振动信号。
同时,测试过程中需要进行多次测试和分析,以提高测试结果的可靠性和准确性。
通过动平衡测试可以及时发现和解决系统中的动力学平衡问题,从而提高机械系统的性能、稳定性和寿命。
动平衡原理解析
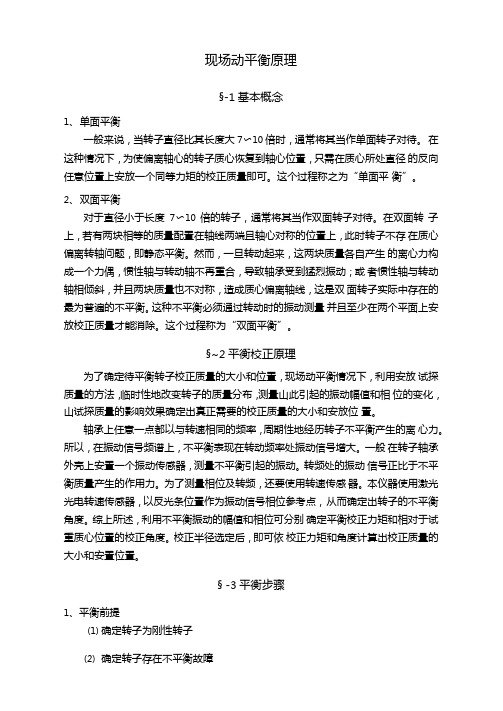
现场动平衡原理§-1基本概念1、单面平衡一般来说,当转子直径比其长度大7〜10倍时,通常将其当作单面转子对待。
在这种情况下,为使偏离轴心的转子质心恢复到轴心位置,只需在质心所处直径的反向任意位置上安放一个同等力矩的校正质量即可。
这个过程称之为“单面平衡”。
2、双面平衡对于直径小于长度7〜10倍的转子,通常将其当作双面转子对待。
在双面转子上,若有两块相等的质量配置在轴线两端且轴心对称的位置上,此时转子不存在质心偏离转轴问题,即静态平衡。
然而,一旦转动起来,这两块质量各自产生的离心力构成一个力偶,惯性轴与转动轴不再重合,导致轴承受到猛烈振动;或者惯性轴与转动轴相倾斜,并且两块质量也不对称,造成质心偏离轴线,这是双面转子实际中存在的最为普遍的不平衡。
这种不平衡必须通过转动时的振动测量并且至少在两个平面上安放校正质量才能消除。
这个过程称为“双面平衡”。
§~2平衡校正原理为了确定待平衡转子校正质量的大小和位置,现场动平衡情况下,利用安放试探质量的方法,临时性地改变转子的质量分布,测量山此引起的振动幅值和相位的变化,山试探质量的影响效果确定出真正需要的校正质量的大小和安放位置。
轴承上任意一点都以与转速相同的频率,周期性地经历转子不平衡产生的离心力。
所以,在振动信号频谱上,不平衡表现在转动频率处振动信号增大。
一般在转子轴承外壳上安置一个振动传感器,测量不平衡引起的振动。
转频处的振动信号正比于不平衡质量产生的作用力。
为了测量相位及转频,还要使用转速传感器。
本仪器使用激光光电转速传感器,以反光条位置作为振动信号相位参考点,从而确定出转子的不平衡角度。
综上所述,利用不平衡振动的幅值和相位可分别确定平衡校正力矩和相对于试重质心位置的校正角度。
校正半径选定后,即可依校正力矩和角度计算出校正质量的大小和安置位置。
§ -3平衡步骤1、平衡前提(1)确定转子为刚性转子(2)确定转子存在不平衡故障不平衡属于低频故障,当5Hz〜lKHz的通频振动(位移峰峰值或速度有效值) 较正常值有明显增大时,说明设备有低频类故障在发展。
现场动平衡仪原理【详解】
动平衡机是针对单个转子进行的动平衡,一般转速有转速的限制,在安装的过程中会出现二次的安装不平衡。
动平衡仪GLFore N600则可以在整体设备上进行动平衡,免去安装问题,转速范围比较广,要求转子有驱动带动,时间也比较快捷。
现场动平衡仪(GLFore 的,cemb—N600)具有数据采集、频谱分析等功能,能够使工程师准确判断是否为动平衡问题。
此外,能够协助工程师判断机械设备振动问题来源。
在确定问题是动平衡原因的前提下,还能进行现场动平衡操作,无需拆卸设备,使整体平衡。
减少不必要的拆卸,减少不必要的搬运,让动平衡简单可靠。
国际标准ISOl940一1973(E)“刚体旋转体的平衡精度”中规定,要求平衡精度为G0.4的精密转子,必须使用现场平衡,否则平衡毫无意义。
现代的动平衡技术是在本世纪初随着蒸汽透平的出现而发展起来的。
随着工业生产的飞速发展,旋转机械逐步向精密化、大型化、高速化方向发展,使机械振动问题越来越突出。
机械的剧烈振动对机器本身及其周围环境都会带来一系列危害。
虽然产生振动的原因多种多样,但普遍认为“不平衡力”是主要原因。
所以,动平衡仪有着其独特的优势,希望不要与动平衡机搞混。
扩展资料:定义:1)静平衡在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。
2)动平衡在转子两个校正面上同时进行校正平衡,校正后的剩余不平衡量,以保证转子在动态时是在许用不平衡量的规定范围内,为动平衡又称双面平衡。
现代,各类机器所使用的平衡方法较多,例如单面平衡(亦称静平衡)常使用平衡架,双面平衡(亦称动平衡)使用各类动平衡试验机。
静平衡精度太低,平衡时间长;动平衡试验机虽能较好地对转子本身进行平衡,但是对于转子尺寸相差较大时,往往需要不同规格尺寸的动平衡机,而且试验时仍需将转子从机器上拆下来,这样明显是既不经济,也十分费工(如大修后的汽轮机转子)。
现场平衡信号分析技术

半径为rR处加一试验配重|
WtR
|、
tR
,测出左右位置各自
的振幅和相位∣L3∣,γ3 和| R3 |、ε3 。
(4) 画出振动向量图,如图4所示,经过计算求出配重的正确
位置和大小。
(5) 按计算结果加配重,进行动平衡振动测试,若不满足要求
则再重复进行。
现场平衡信号分析技术
2、测试步骤
图4 振动向量图
现场平衡信号分析技术
(二)平衡法选择
1. 对于刚性转子(工作转速低于第一阶临界转速) 1) 当转速n>1800r/min 或 n>900r/min和L∕D>0.5时, 必须进行动平衡; 2) 当转速n≤900r/min 或 n≤1800r/min和 L/D<0.5时, 只需进行静平衡。 2. 对于柔性转子(工作转速超过第一阶临界转速)则必须进行
动平衡。
现场平衡信号分析技术
三、动平衡方法
动平衡方法有动平衡机法和现场平衡法两种,其特点 如下:
1、动平衡机法:这种方法效率高、精度高。但必须将被 平衡的转子部件从机器上卸下来,放在动平衡机上进行。 主要用于精密转子部件的平衡和机器的生产装配。
2、现场平衡法:这种方法不需要拆卸转子,在机器的工 作现场即可进行平衡,虽平衡过程较费时,精度稍差,但 由于仪器简单,又不需要拆卸机器,故在现场经常使用。
现场平衡信号分析技术
采用现场平衡技术实测得以下数据,计算所需的平衡配重
WL 和 WR 。
L1 12600
L2 101150 L3 7400
R1 141000
R2 81250 R3 6450
WtL 40g2100
WtR 40g3000
现场平衡信号分析技术
在上面计算中需要运用向量的代数运算,其运算法则如下:
现场动平衡
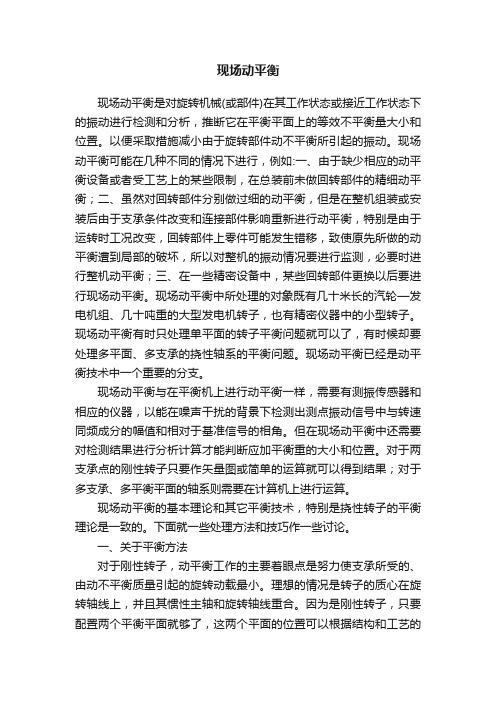
现场动平衡现场动平衡是对旋转机械(或部件)在其工作状态或接近工作状态下的振动进行检测和分析,推断它在平衡平面上的等效不平衡量大小和位置。
以便采取措施减小由于旋转部件动不平衡所引起的振动。
现场动平衡可能在几种不同的情况下进行,例如:一、由于缺少相应的动平衡设备或者受工艺上的某些限制,在总装前未做回转部件的精细动平衡;二、虽然对回转部件分别做过细的动平衡,但是在整机组装或安装后由于支承条件改变和连接部件影响重新进行动平衡,特别是由于运转时工况改变,回转部件上零件可能发生错移,致使原先所做的动平衡遭到局部的破坏,所以对整机的振动情况要进行监测,必要时进行整机动平衡;三、在一些精密设备中,某些回转部件更换以后要进行现场动平衡。
现场动平衡中所处理的对象既有几十米长的汽轮—发电机组、几十吨重的大型发电机转子,也有精密仪器中的小型转子。
现场动平衡有时只处理单平面的转子平衡问题就可以了,有时候却要处理多平面、多支承的挠性轴系的平衡问题。
现场动平衡已经是动平衡技术中一个重要的分支。
现场动平衡与在平衡机上进行动平衡一样,需要有测振传感器和相应的仪器,以能在噪声干扰的背景下检测出测点振动信号中与转速同频成分的幅值和相对于基准信号的相角。
但在现场动平衡中还需要对检测结果进行分析计算才能判断应加平衡重的大小和位置。
对于两支承点的刚性转子只要作矢量图或简单的运算就可以得到结果;对于多支承、多平衡平面的轴系则需要在计算机上进行运算。
现场动平衡的基本理论和其它平衡技术,特别是挠性转子的平衡理论是一致的。
下面就一些处理方法和技巧作一些讨论。
一、关于平衡方法对于刚性转子,动平衡工作的主要着眼点是努力使支承所受的、由动不平衡质量引起的旋转动载最小。
理想的情况是转子的质心在旋转轴线上,并且其惯性主轴和旋转轴线重合。
因为是刚性转子,只要配置两个平衡平面就够了,这两个平面的位置可以根据结构和工艺的条件而任意选定。
对于每个平衡平面需确定在其指定半径上的不平衡量大小及相角两个参数,因此对于两个平衡平面共有四个待定参数。
现场动平衡

现场动平衡1、现场动平衡的特点①不需要专门的平衡设备,仅使用适当的现场测试仪器;②对生产和工作影响最小;③对操作人员的技术水平要求较高;2、现场动平衡原理为了确定待平衡转子校正质量的大小和位置,现场平衡情况下,利用安放试重质量的方法,临时性地改变转子的质量分布,测量由此引起的轴承振动大小和相位的变化,由试重质量的影响效果确定的真正需要的校正质量的大小和安放位置。
3、一般平衡步骤(1)频谱分析平衡前先要作一次振动信号的频谱分析,以便确定最大的振动是不平衡引起的,这是因为其他故障。
例如,不对中或轴弯曲。
转子不平衡在频谱上的特征是转动频率处主要在径向上出现振动水平的峰值,而且这种峰值一般要高出许多。
不平衡故障的振动特征:1.振动频率主要是转速频率,转子每转一圈振动一次-单峰频谱;2.波形近似为正弦波;3.水平和垂直方向的转速频率相位相差90°;4.振幅随转速提高而增加。
弯曲、不对中的振动相位特征:1.相位稳定;2.轴两端轴向振动之间相位差180°。
(2)选择最佳测量参数平衡前所作的振动信号频谱分析还能帮助我们选择振动测量的最佳参数。
测量振动可以测量加速度、速度或位移。
图9.15表示出这三个参数的幅值为频率函数的关系曲线,三条曲线斜率不同,但都在相同频率处出现峰值。
每条曲线都包含着振动水平的同样信息,然后给出信息的方式有很大不同。
由测量灵敏度考虑,一般在低转速时选用位移或速度参数,它们的灵敏度较高,只有当转速高于1000r/s时,才选用加速度。
经验证明,速度曲线最平缓,所以,一般最常选用的参数是速度;加速度曲线倾向于突出高频成分,当低频噪声成问题时可选用加速度,位移曲线则倾向于突出低频成分,常用来对抗高频噪声。
(3)确定平衡质量等级一台理想的平衡状态的机器应该完全没有不平衡。
但实际上,不可能达到完美无缺的平衡状态,对于不同类型的机器,所谓振动太大其含意有很大不同,根据实际工作需求,按照不同的允许振动水平将转子平衡要求进行分类十分重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现场动平衡的原理及分离解算
有些回转体系统体积巨大,以至于没有合适的动平衡机能支承运行;有些小厂不具备利用动平衡机进行平衡的工作条件;有些回转体的工作环境为高热或高电磁场等,由于热变形或磁滞伸缩变形等,使在动平衡机上已达到的平衡遭到破坏;又由于运输或维修等原因,需要对平衡好的回转体重新进行组装;所有这些情况,均需要进行现场动平衡解决。
现场动平衡可以包括进行单面静平衡及对柔性回转体的动平衡。
进行静平衡的方法很简单,首先在回转体附加支承处(最好离校正面距离最短),振动较大的方向(通常为水平方向)上,安置传感器,并接通一个测振仪,启动回转体至工作转速下记录振动响应的大小,高读数为X,对应着被测的不平衡量U,并存在关系式U=kx,对于刚性
回转体而言,在固定的转速下,不论是硬支承还是软支承,k 一定是个常数,所以也一定存在矢量关系式U=kx。
为求出矢量x 的角度(或相位)可采用转们两次法进行测量计算。
即在回转体半径为R(mm) 任意位置上,安置一块校验质量M(g),然后启动回转体至相同的转速下,记录此时的振动响应,高读数为x1,显然,x1 为原不平衡量U 及校验不平衡量U1=MR 共同作用产生的,即kx1=U+Ut.将校验质量M(g)转位180º,重新安置后再次启动回转体至相同转速下,记录此时的振动响应,高读数为X2,应有kx2=U-Ut,因而利用图解的方法,很容易求解矢量方程。
对于需要进行双面平衡的回转体,应使用能测量相位的现场动平衡测试仪器,因而需要在回转体上设置其准信号发生器,常用光电式,也有使用由支承处的振动信号触发的同步闪光灯,由于人眼的视觉暂停现象,会学得观察到的回转体,处于静止状态。
需要预先在校正面上设置了0°,90°,180°…等角度标记,便可在同步内光的情况下,便可以观察出设置的0°角度标记与某固定位置(例如水平方向)之间的夹角了。
有了其准信。