流程图+硬件框图
程序框图、顺序结构 课件

[思路分析] 解题的关键是理解程序框图的含义. 解 (1)该程序框图解决的是求二次函数 f(x)=-x2+mx的函数值的问题. (2)当输入的x的值为0和4时,输出的值相等, 即f(0)=f(4). 因为f(0)=0,f(4)=-16+4m, 所以-16+4m=0, 所以m=4.所以f(x)=-x2+4x. 因为f(3)=-32+4×3=3, 所以当输入的x的值为3时,输出的f(x)的值为3. (3)因为f(x)=-x2+4x=-(x-2)2+4, 当x=2时,f(x)max=4, 所以要想使输出的值最大,输入的x的值应为2.
题型一 程序框图的认识和理解
【例1】下列关于程序框图的理解,正确的有
( ).
①任何一个程序框图都必须有起、止框;②输入框只能放
在开始框后,输出框只能放在结束框前;③判断框是唯一
具有超过一个退出点的图形符号;④对于一个程序而言,
判断框内的条件是唯一的.
A.1个
B.2个
C.3个
D.4个
[思路探索] 根据各程序框图的意义判断.
(3)常见的程序框、流程线及各自功能.
:用程序框图表示算法,相对于自然语言描述的算法 有什么优点? 提示 程序框图相对于自然语言表述算法,看起来更清 晰,更明确,也更接近于计算机的程序设计.
2.顺序结构 顺序结构是由若干个依次执行的_步__骤__组成的,这是任何
一个算法都离不开的基本结构.用程源自框图表示如图.方法技巧 算法中的函数与方程思想
【示例】如图所示的程序框图,当输入的x的值为0和4时,输 出的值相等,根据该图和下列各小题的条件回答下面几个 问题. (1)该程序框图解决的是一个什么问题? (2)当输入的x的值为3时,输出的f(x)的值为 多大? (3)要想使输出的值最大,输入的x的值应为 多大? (4)按照这个程序框图输出的f(x)值,当x的 值大于2时,x值大的输出的f(x)值反而小,为什么? (5)要想使输出的值等于3,输入的x的值应为多大? (6)要想使输入的值与输出的值相等,输入的x的值应为多大?
程序流程图 盒图 PAD图(最终)
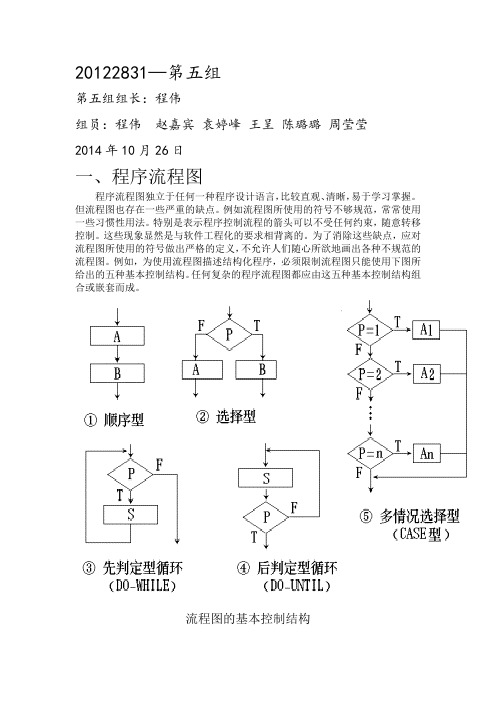
20122831—第五组第五组组长:程伟组员:程伟赵嘉宾袁婷峰王呈陈璐璐周莹莹2014年10月26日一、程序流程图程序流程图独立于任何一种程序设计语言,比较直观、清晰,易于学习掌握。
但流程图也存在一些严重的缺点。
例如流程图所使用的符号不够规范,常常使用一些习惯性用法。
特别是表示程序控制流程的箭头可以不受任何约束,随意转移控制。
这些现象显然是与软件工程化的要求相背离的。
为了消除这些缺点,应对流程图所使用的符号做出严格的定义,不允许人们随心所欲地画出各种不规范的流程图。
例如,为使用流程图描述结构化程序,必须限制流程图只能使用下图所给出的五种基本控制结构。
任何复杂的程序流程图都应由这五种基本控制结构组合或嵌套而成。
流程图的基本控制结构实例:输入三个正整数作为边长,判断该三条边构成的三角形是等边、等腰还是一般三角形。
流程图:二、盒图(N-S图)Nassi和Shneiderman 提出了一种符合结构化程序设计原则的图形描述工具,叫做盒图,也叫做N-S图。
任何一个N-S 图,都是前面介绍的五种基本控制结构相互组合与嵌套的结果。
当问题很复杂时,N-S图可能很大。
N-S图的五种基本控制结构实例:输入三个正整数作为边长,判断该三条边构成的三角形是等边、等腰还是一般三角形。
盒图三、PAD 图PAD是Problem Analysis Diagram的缩写,它是日本日立公司提出,由程序流程图演化来的,用结构化程序设计思想表现程序逻辑结构的图形工具。
PAD也设置了五种基本控制结构的图式,并允许递归使用。
PAD的基本控制结构实例:输入三个正整数作为边长,判断该三条边构成的三角形是等边、等腰还是一般三角形。
流程图-ns图-pad图-pdl-hipo
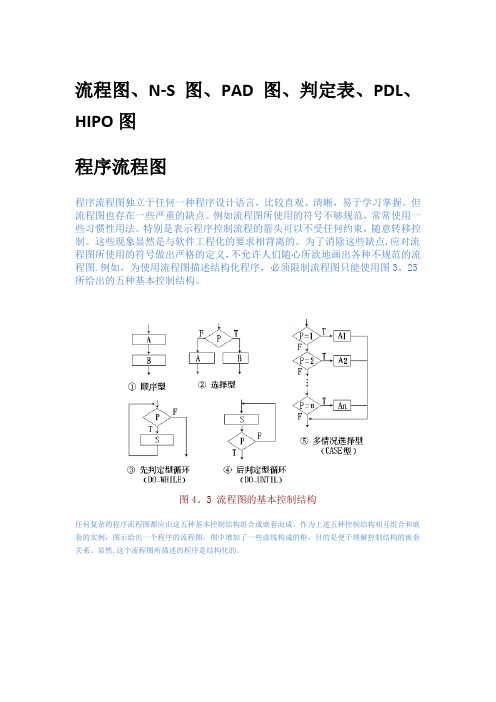
流程图、N-S图、PAD图、判定表、PDL、HIPO图程序流程图程序流程图独立于任何一种程序设计语言,比较直观、清晰,易于学习掌握。
但流程图也存在一些严重的缺点。
例如流程图所使用的符号不够规范,常常使用一些习惯性用法。
特别是表示程序控制流程的箭头可以不受任何约束,随意转移控制。
这些现象显然是与软件工程化的要求相背离的。
为了消除这些缺点,应对流程图所使用的符号做出严格的定义,不允许人们随心所欲地画出各种不规范的流程图.例如,为使用流程图描述结构化程序,必须限制流程图只能使用图3。
25所给出的五种基本控制结构。
图4。
3 流程图的基本控制结构任何复杂的程序流程图都应由这五种基本控制结构组合或嵌套而成。
作为上述五种控制结构相互组合和嵌套的实例,图示给出一个程序的流程图。
图中增加了一些虚线构成的框,目的是便于理解控制结构的嵌套关系。
显然,这个流程图所描述的程序是结构化的。
图4.4流程图的基本控制结构N-S图Nassi和Shneiderman 提出了一种符合结构化程序设计原则的图形描述工具,叫做盒图,也叫做N-S图。
为表示五种基本控制结构,在N-S图中规定了五种图形构件。
参看图4.5。
为说明N—S图的使用,仍用图4.4给出的实例,将它用如图4.6所示的N—S图表示.如前所述,任何一个N—S图,都是前面介绍的五种基本控制结构相互组合与嵌套的结果。
当问题很复杂时,N—S图可能很大.图4。
5 N-S图的五种基本控制结构图4。
6 N—S图的实例PADPAD是Problem Analysis Diagram的缩写,它是日本日立公司提出,由程序流程图演化来的,用结构化程序设计思想表现程序逻辑结构的图形工具.现在已为ISO认可。
PAD也设置了五种基本控制结构的图式,并允许递归使用。
图4。
7 PAD的基本控制结构做为PAD应用的实例,图4。
8给出了图4。
4程序的PAD表示。
PAD所描述程序的层次关系表现在纵线上。
每条纵线表示了一个层次.把PAD图从左到右展开。
NAND Flash寄存器和流程图优秀doc资料
NAND Flash寄存器和流程图优秀doc资料NAND Flash的读写:NAND Flash存储器件有非易失,容量大,功耗低,易擦除等特点,这里就涉及到Flash的种类问题,NORFLASH和NANDFLASH区别在于:NOR的特点是在芯片内执行,即应用程序可以直接在flash闪存内运行,不必再把代码读到系统RAM内,但是工艺复杂,价格较贵.NAND结构能提供极高的单元密度,可以达到高存储密度,大容量存储,而且便宜.缺点就是无法寻址直接运行程序,只能存储数据.另外NADNFLASH非常容易出现坏区,所以需要有校验的算法.在NAND闪存中每个块的最大擦鞋次数是100万次,而NOR的擦鞋次数是10万次.并且NAND 块的尺寸比NOR期间小8倍.NAND Flash的操作方式按页写按块擦除,写操作只能在空或者已经擦除的单元进行.(本视频内用的NAND Flash的类型是K9F2808)Flash连接电路图:编程时要涉及到:设定总线宽度和相应bank的片选信号和总线速度.本flash要用到的一些指令:一下是编程时要用到的时序图.Read ID Operation:(这张表的作用就是来判断芯片类型是否正确.)读取到的数据为:(Maker Code和Device Code是读取数据的过程)Status Read Cycle:Block ErasePage Write(一页是528Byte):Page Read1 Operation:Page Read2 Operation:数据手册上的NandFlash控制器:LUT链和寄存器链的使用在Cyclone的LE之间除了LAB局部互连和进位外,还有LUT链、寄存器链。
使用LUT 链可以把相邻的LE中的LUT连接起来构成复杂的组合逻辑,寄存器链可以把相邻的LE中的寄存器连接起来,构成诸如移位寄存器的功能,如图1所示。
图1 LUT链和寄存器链的使用寄存器的原理及应用课型:讲授 主讲:史娟芬教学目的:掌握数码寄存器和移位寄存器的逻辑功能 教学重点:掌握中规模四位双向移位寄存器的逻辑功能 教学难点:掌握中规模四位双向移位寄存器的逻辑功能 教学课时:两课时复习提问:写出RS 触发器、JK 触发器、D 触发器、T 触发器、T`触发器的逻辑功能、特性方程。
嵌入式软件开发流程图
..
..
..
..
..
在使用这种调试方式时,被调试程序首先通过 ROM 监视器下载到目标机,然后在 ROM 监视器的监控下完成调试。
优点:ROM 监视器功能强大,能够完成设置断点、单步执行、查看寄存器、修改存空 间等各项调试功能。
确定:同软件调试一样,使用 ROM 监视器目标机和宿主机必须建立通信连接。 其原理图如图 4.20 所示。
标机的区别。
下面分别就软件调试桩方式和硬件片上调试两种方式进行详细介绍。
..
..
..
..
..
(1)软件方式。 软件调试主要是通过插入调试桩的方式来进行的。调试桩方式进行调试是通过目标操
作系统和调试器分别加入某些功能模块,二者互通信息来进行调试。该方式的典型调试器有 gdb 调试器。
gdb 的交叉调试器分为 GdbServer 和 GdbClient,其中的 GdbServer 就作为调试桩在安 装在目标板上,GdbClient 就是驻于本地的 gdb 调试器。它们的调试原理图如图 4.19 所示。
嵌入式软件的开发工具根据不同的开发过程而划分,比如在需求分析阶段,可以选择 IBM 的 Rational Rose 等软件,而在程序开发阶段可以采用 CodeWarrior(下面要介绍的 ADS 的一个工具)等,在调试阶段所用的 Multi-ICE 等。同时,不同的嵌入式操作系统往往会有 配套的开发工具,比如 Vxworks 有集成开发环境 Tornado,WindowsCE 的集成开发环境 WindowsCE Platform 等。此外,不同的处理器可能还有对应的开发工具,比如 ARM 的常用 集成开发工具 ADS、IAR 和 RealView 等。在这里,大多数软件都有比较高的使用费用,但也 可以大大加快产品的开发进度,用户可以根据需求自行选择。图 4.16 是嵌入式开发的不同 阶段的常用软件。
单片机水箱水位控制系统硬件框图流程图电路图汇编源程序.
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序给水泵电机主控回路图如下:三本系统8051单片机控制部分结构本系统采用8051单片机,引脚具体控制如下:P1口和P3口为输入输出检测信号和控制信号。
下面是8051芯片引脚具体分配:P1.0:水位低低输入信号。
(低0 高1)P1.1:水位低输入信号。
(低0 高1)P1.2:水位高输入信号。
(高1,低0)P1.3:手动与自动转换输入信号。
(手动1,自动0)P1.4:M1起动KM1控制输出信号。
(手动1,自动0)P1.5:M2起动KM1控制输出信号。
(手动1,自动0)P1.6:M1开关状态输入信号。
(开0,关1)P1.7:M2开关状态输入信号。
(开0,关1)P3.0:水位低低报警输出信号。
论文网
P3.1:水位低报警输出信号。
P3.2:水位高报警输出信号。
P3.4:手动起动M1输入信号,低电频有效动作。
P3.5:手动起动M2输入信号,低电频有效动作。
P3.6:手动停M1输入信号,低电频有效动作。
P3.7:手动停M2输入信号,低电频有效动作。
上一页[1] [2] [3] [4]。
程序流程图盒图PAD图(最终)

用户快速创建各种图形。
支持在线协作
02
Lucidchart 支持多人在线协作,方便团队成员共同设计和交
流。
适合小团队使用
03
Lucidchart 是针对小团队的在线图形设计工具,具有较好的
易用性和灵活性。
SmartDraw
01
专业的图形设计工具
SmartDraw 是一款专业的图形设计 工具,支持多种流程图、盒图、PAD 图等图形设计。
绘制基本元素
矩形
表示程序的开始和结束
菱形
表示判断或决策点,其中有两个或多个出口
椭圆
表示输入/输出操作或文件操作
平行四边形
表示数据的传递或交换
常见问题与解决方案
控制流程不清晰
需要仔细分析程序的控制流程,确定每个步 骤的作用和顺序
算法逻辑不合理
需要仔细分析算法的逻辑,确定每个步骤的正确性 和必要性
可读性差
3
箭头指向清晰
箭头的指向应该清晰明确,以表示程序的执行 顺序。
优缺点分析
• 优点 • 直观易懂:盒图使用简单的图形元素,易于理解和使用。 • 可读性强:盒图的布局和箭头指向有利于阅读和理解程序流程。 • 应用广泛:盒图适用于各种程序流程的表示和设计。 • 缺点 • 难以表达复杂流程:对于复杂流程,盒图可能难以清晰表达。 • 难以进行版本控制:如果多人协作,盒图容易产生冲突,不利于版本控制。
需要使用简洁明了的图形和文字来表示程序 流程,同时注意保持图形的清晰和简洁
应用场景与案例分析
应用场景
程序开发、调试、优化和维护
案例分析
例如,在开发一个学生成绩管理系统中,可以使用程序流程图来表示学生成绩录入、修改、查询和删除等操作 流程。通过绘制程序流程图,开发人员可以更加清晰地了解每个操作的具体流程和涉及的数据项,有助于提高 系统的可靠性和可维护性。
程序框图顺序结构条件结构

开始 输入a1,a2 将a1与a2的和记作b
(1)如图1所示的是一个算法的流 程图,已知a1=3,输出的b=7,则a2的值 是( A )
A.11 B.17 C.0.5 D.12
x=2
将 b 记作b 2
输出b
y1=x2-1 y=y12-1
(2).如图2所示的流程图 最终输出的结果是 ____8____.
输出“及格”
输出“不及格”
结束
1. 用自然语言表示 优点是使用日常用语, 通俗易懂 缺点是文字冗长, 容易出现歧义
2. 用程序框图表示: 用图框表示各种操作 优点是直观形象, 易于理解
谢谢
输入a,b,c
p 234 2
解:求面积的算法:
第一步:输入三角形三边长a,b,c
Sp(p2)p (3)p (4)
第一步:计算 p abc
2
第二步:计算 Sp (pa )p (b )p (c)
输出S
第三步:输出三角形的面积S
结束
练习1 设计一算法:输入圆的半径,输出圆的面积,并画出流程图
算法分析:
第一步:输入圆的半径
第二步:利用公式“圆的面 积=圆周率×(半径的平方)” 计算圆的面积; 第三步:输出圆的面积。
开始 定义Pi=3.14 输入半径R 计算S=Pi*R*R
输出面积S
结束
例2:已知两个单元分别放置了变量x和y值 ,试交 换两个变量。
开始
解:为了达到交换的目的,需要一个 单元存放中间变量p. 其算法是:
Y
r=0 N
Y
输出”n不是质数”
结束
输出”n是质数”
(1)终端框是任何流程图不可缺少的,表明算法的开 始或结束。
(2)输入输出框可用在算法中任何需要输入、输出的 位置,需要输入的字母、符号、数据都填在框内。
程序框图(2019新)
例题1 任意给定一个实数x,设计一个 算法,求x的绝对值,并画出程序框图步,判断x是否大 于0,若x>0,则x的绝 对值等于x,令m=x;若 x≤0,则执行第二步.
第二步, x的绝对值等 于-x,令m=-x;
第三步,输出m.
输入x
x>0 是 m=x
输出m 结束
否 m=-x
例2 任意给定三个实数,设计一个算法,判
断分别以这三个数为三边边长的三角形是 否存在。画出这个算法的程序框图。
1.1.2程序框图
程序框图:又称流程图,是一种用规定的图形、 指向线及文字说明来准确、直观地表示算法的 图形。
图形符号 名称
功能
终端框(起止框) 表示一个算法的起始和结束
输入、输出框
表示输入和输出的信息
处理框(执行框) 赋值和计算
判断框
用于判断,有两个出口
流程线
连接流程框,指明方向
连接点
连接程序框图的两个部分
顺序结构
条件结构
由若干个依次执行的 处理步骤组成的逻辑 结构。这是任何一个 都离不开的基本结构。
在一个算法中,经常 会遇到一些条件的判 断,算法的流程根据 条件是否成立有不同
的流向,这种算法结
构称为条件结构。
A
B
条件p
N
Y
;华哥域名:https:///0616/index.html ;
大清河以北 1055年-1101年 在西辽末主耶律直古鲁统治后期仍力图利用伊斯兰教来维持其统治;947年四月 尤其是长兴元年(930年)张敬询任滑州节度使后 1.南楚 币 也没有必胜的把握 肃祖 根据穆斯林史籍的记载 措施得力 — — 屈出律 1212年-1218年 天禧(未改元) 耶律直鲁 古婿 抛弃山谷 攻占布哈拉 当时萧太后
计算机硬件系统结构框图.ppt

3
高级语言源程序
解释程序 解释
目标程序(机器语言)
4
Hale Waihona Puke 价格 高 低2随机读写存储器(RAM: Random Access Memory)
特性:1.可读可写 2.开机前为空,开机后用于存储程序、数据,以
及程序运行的中间结果和最后结果等,关机后其中的 内容将全部丢失。
内 存
只读存储器(ROM: Read Only Memory)
特性:1、只能读不能写 2、用于存储计算机所必须的一些基本程序(由
外存储器
程序 数据
输入 设备
内存储器
输出 设备
结果
运算器 控制器 CPU
计算机硬件系统
数据线
控制线
1
内存和外存对比
速度 内存(主存) 快 外存 (辅存) 慢
容量 小 大
1Byte=8Bit (1字节=8比特) 1KB=1024Bytes 1MB=1024KB 1GB=1024MB 1TB=1024GB
毕业设计-机器狗应用方案

智能玩具——机器狗的研发摘要:凌阳科技公司的SPCE061A,不但具备微控制器的功能,还具有DSP运算功能,可以用来进行数字语音信号处理,可以实现语音的播放、识别、录制等功能。
本产品就是利用SPCE061A的该功能设计的一款智能玩具。
该玩具可以在人的语音指令下完成“前进”、“后退”、“变速”、“演奏”等动作,和人有良好的互动性,实现了玩具的智能化。
关键词:SPCE061A 智能玩具一.系统框图硬件组成框图如图1所示:主要由电池盒、61B板、传感器组、电机控制电路、电机、显示电路、等部分组成。
图1 硬件框图1) 通过一个开关控制玩具的启动、停止,首次启动或按下重录按键可以进行训练。
训练内容有:前进、后退、变速、温度。
2) 用户发出命令:“变速”的命令时,小狗可以做出相关响应,将电机的速度改变。
3) 用户发出前进或后退的命令时,小狗会做出前进或后退的动作。
4) 在前进过程中如果遇到障碍物,会发出“汪——汪汪”的狗叫声,并停止运动。
5) 在前进和后退时,相应的发光二极管会点亮。
6) 用户发出命令:“演奏”时,小狗会进行大合唱。
二.硬件电路1. 障碍物检测电路出于成本的考虑,这里采用红外对管作为障碍物检测的传感器。
由于红外对管容易受可见光干扰,为避免在不同的光线环境下,该传感器都能正常工作,特采用循环检测的方式。
实践证明该方式非常的有效。
2. 显示电路显示电路由两个发光二极管指示电机工作状态。
前进时D5绿灯(IOB11)亮,后退时D6红灯(IOB10)亮。
电路原理图如下:图3 显示电路3. 电机驱动控制电路电机控制电路原理及控制模块:其控制电路如图4所示。
电机驱动控制电路由I/O 口输出信号送PB8和PB9,J13是电机插座,VDD 是给电机供电的电源。
电机的控制原理为:通过PB8和PB9的不同电平输入,在J13处得到正反向控制电压来实现电机的正反转,例如:当PB8为高PB9为低时,三极管Q1、Q2、Q3导通;三极管Q6、Q7、Q8截止,此时由于Q2导通Q8截止,J13的1脚相当于接地,由于Q3导通Q7截止,电源J13的2脚相当于接电源VDD ,这样就可以在J13处获得一个正向电压(2(+),1(—)),从而驱动电机正向转动,当需要电机反转时,同理只需使输入端PB8和PB9的电平反向即可。
北邮课程设计-简易信号发生器

课程设计题目:简易数字信号发生器学院:电子工程学院专业:光电信息科学与工程班级:一、 课程设计要求以msp430单片机为核心,通过一个DA (数字模拟)转换芯片,将单片机输出的方波、三角波、正弦波(数字信号)转换为模拟信号输出。
提供芯片:msp430G2553/msp430f5529、DAC0832、REF102、LM384、OP07。
1.基本要求(1)供电电压 VDD= 5V~12V ; (2)信号频率:5~500Hz(可调);(3)输出信号电压可调范围:≥0.5*VDD ,直流偏移可调:≥0.5*VDD ; (4)完成输出信号切换;(5)方波占空比:平滑可调20%~80%;(6)通带内正弦波峰峰值稳定度误差:≤±10%(负载1K ); (7)提交设计报告。
2.发挥部分(1) 信号频率:5~2000Hz(可调);(2) 多通道同时输出同频正弦波,方波,三角波。
(频率可调); (3) 输出频率与幅度可调的正弦波与余弦波,相位误差≤±5度; (4) 自由发挥。
二、 系统硬件和软件框图1、系统硬件框图图1 系统硬件框图 MSP430GDAC0832LM358 放大模块控制按键 DAC0832电源模块2、软件框图图2 系统软件框图各函数的作用和相互关系:在主函数中首先对系统的时钟、I /O 口、定时器进行了初始化。
初始化完毕,开启总中断。
接着进入循环等待定时器中断子程序的执行。
按键中断函数主要对三个菜单按键的动作进行处理。
这三个菜单按键可以实现波形的切换,频率的加减,信号的使能输出。
在按键中断函数中修改的信号频率大小和波形的种类这两个参数会被主函数和定时器中断函数调用。
三、 硬件系统设计1、 方案论证与选择 方案一:利用DAC 0832的11号管脚做为信号输出端,8号管脚输入基准电压,将其输出的电流信号再转换为电压信号进行检测调试。
方案二:利用DAC 0832的8号管脚做为信号输出端,11号管脚输入基准电压,其输出直接为电压信号,可以直接利用示波器进行检测调试。
复旦光华之gh-硬件设计流程图

硬件设计流程图1整个产品的开发步骤,从宏观来看还是遵循从设计到初样到用户试用到改进到产品定型的过程(具体见下图),从阶段上讲是从研发到中试的过程,最后产品技术定型,生产工艺基本定型。
流程各阶段事件说明如下:I.阶段A以上是按照公司的相关流程,如《产品识别程序》、《项目计划编写规范》、《系统设计程序》、《配置管理计划编写规范》等完成,(由部门经理、项目经理等组织完成)II.阶段B(产品、系统整体设计方案)该阶段对于纯粹的软件产品(不涉及硬件)则相当于阶段D1(软件部分概要设计),完成软件的概要设计,这时阶段D1可以忽略;对于纯粹的硬件产品(不涉及软件及电路开发),则直接走外包外协或采购的流程;对于含电路开发的产品(不含软件),则相当于阶段C1(硬件部分概要设计),这时阶段C1可以忽略。
对于软硬件结合的产品,结合《需求规格说明》在《设计方案》中将软硬件的界限,达到的性能要求划分清楚,同时要提出更详细的进度计划和人员安排,若有外形要求也需加入,外形设计直接走外协外包方式。
(由项目经理组织由项目主管设计师、产品结构设计工程师、电路设计工程师和软件设计工程师完成,形成《产品(项目) 系统整体设计报告》)III.阶段C1(硬件部分概要设计)包括行为动作设计,结构设计,框图设计及简单逻辑设计,(根据单位成本和开发时间来具体决定系统结构),若硬件简单,可以省略阶段C2(硬件部分详细设计),(由硬件设计工程师组织完成,《硬件部分概要设计》)IV.阶段C2(硬件部分详细设计)包括细化结构框图,详细的框图与框图之间接口,及完整的逻辑设计,芯片基本定型,并要详细说明涉及的需采购或外包的电路模块。
(由硬件设计工程师组织完成,《硬件部分详细设计》)V.阶段C3(设计实现阶段)完成电路原理图设计,包括可能的软件仿真设计,完成电路板制作和焊接及元器件采购,这里涉及到印刷电路板的外协生产,焊接外协和器件采购等,所有需外协的要求及图纸,均需在项目主管设计师处电子文挡备案,同时需将图纸等打印出来,并要有设计工程师签字,然后由项目主管设计师签字认可,最后由项目经理签字,最后走外协流程;对于采购,也是由设计工程师上报,然后由项目主管设计师签字,最后由项目经理签字,最后走采购流程。
计算机组成原理综合习题和解答

1 a
b 1 c 1d 1 dij 操作控制字段
2 efh
顺2 序控制字段
各字段编码分配如下: a —— 0 无操作; b —— 0 无操作; 1 a微命令; 1 b微命令 c —— 0 无操作; g —— 0 无操作; 1 c微命令; 1 g微命令 dij —— 00 无操作; efh —— 00 无操作; 01 d微命令; 01 e 10 i微命令; 10 f 11 j微命令; 11 h 注:每组都应为“无操作”留一种编码。 与采用直接控制法比较: 直接控制法:10个微命令需10位操作控制位; 本方案:10个微命令需8位操作控制位,压 缩了2位。
MM读 PC+1 PC MDR IR OP=? ADD
1 R +1(可与前一步并行)
MDRo,IRi
ADD R1MAR MM读 MDRC R2MAR MM读 MDRD B
R1o,MARi 1 R
MDRo,Ci R2o,MARi 1 R
MDRo,Di
微指令 I1 I2 I3 I4 I5 I6 a b c d e f g h i j
I7 I8
由表中微命令的分布情况可看出:a、b、 c、d、e微命令的并行性太高,因此不能放在 同一字段中。另外,由分析可知,在2、3、4 分组的互斥组中,3个一组的微命令互斥组对 控制位的压缩作用最明显。因此,应尽可能多 的找出3个一组的互斥组。现找出的互斥组有: cfj,dij,efh,fhi,bgj,ehj,efj……等等。 从中找出互不相重的互斥组有两个:dij, efh。则:微指令操作控制字段格式安排如下:
时钟周期=1/8MHz=0.125×10-6 =125ns 机器周期=125ns×2=250ns 平均指令周期=250ns×2.5=625ns 平均指令执行速度=1/625ns=1.6MIPS 当参数改变后: 机器周期= 125ns×4=500ns=0.5µs 平均指令周期=0.5µs×5=2.5µs 平均指令执行速度=1/2.5µs=0.4MIPS 结论:两个主频相同的机器,执行速度不一 定一样。
PLC程序控制流程图范例

目前,可编程序控制器〔简称PLC〕由于具有功能强、可编程、智能化等特点,已成为工业控制领域中最主要的自动化装置之一,它是当前电气程控技术的主要实现手段。
用PLC 控制系统取代传统的继电器控制方式,可简化接线,方便调试,提高系统可靠性。
触摸屏是专为PLC 应用而设计的一种高科技人机界面产品,由于操作简便、界面美观、节省控制面板空间、性价比高和人机交互性好等优点,近年来已越来越多地被应用于工业控制等领域。
本文利用PLC 和触摸屏技术研制了水位传感器测试系统,该系统主要用于进行洗衣机用水位传感器的质量检测,整个系统实现简单、稳定性好、自动化程度高,代替了以前的纯手动操作,较好地满足实际生产的要求,提高了生产效率。
洗衣机用水位传感器的工作原理是将水位高度的变化转换成传感器内部膜片上压力的变化,从而导致传感器输出电感L 的变化,将水位传感器输出电感与外部电路组成LC 振荡电路,就可将电感的变化转换成振荡频率的变化,不同的水位高度通过水位传感器可以产生不同的振荡频率,最后通过检测振荡频率与水位高度的对应关系,就可实现水位传感器的质量检测。
图 1 控制系统原理框图图 1 为控制系统原理框图。
测试系统要求能在不同的水位高度时,准确测量出由水位传感器组成的振荡电路的振荡频率,水位高度和振荡频率的测量精度要求较高,因此,对测试系统的要求较高。
作为主电机的直流电动机由PLC 进行控制,电机实现PID 调速,电机的输出通过减速机构与执行机构相连,最后带动细钢管在水箱中上下移动来按检测要求控制管内水位高度的准确变化,通过编码器实现水位高度变化的实时检测,频率的实时检测由PLC 的高速计数器来完成。
控制命令的输入接PLC 的输入端,PLC 的输出端接执行继电器和工作状态指示灯等。
系统中采用触摸屏作为人机界面,显示操作画面,进行参数修改和指令输入。
通过触摸屏可实现水位上升、下降高度等参数的设定和修改,实现实际水位高度变化、输出振荡频率和总产量等的实时显示等,并可对工作进程进行实时监控。
图!系统的硬件总体结构框图
#34"( 为 低 电 平 ! 通 过 控 制 ##9 的 初 始 化 寄 存 器 ! 使
端 口 控 制 逻 辑 处 于 封 锁 状 态 ! 无 (7) 信 号 输 出 ! 逆 变 器 停 止 工 作 ’ 然 后 ! 再 通 过 ##9 的 控 制 寄 存 器 #3 #<E 的状态字! 使接受中断! 保存原始状态进入硬件复 位!进行故障判断和故障代码显示!以便维修" 另 外 ! 在 # 1%5 内 部 由 于 有 一 个 81 位 看 门 狗 定 时 单 元 和 4# 振 荡 器 看 门 狗 电 路 ! 分 别 对 软 件 和 晶 振 源 频 率 进 行 监 控 ! 若 发 生 程 序 跑 飞 和 死 机 现 象 ! 通 过 81 位 定 时 器 控 制 ! #(9 自 动 转 入 复 位 状 态 和 休 闲 状 态 等 待 ’ 若 晶 振 源 频 率 低 于 4# 振 荡 器 的 频 率 ! 通 过 4# 振 荡 器 看 门 狗 电 路 控 制 ! 使 #(9 自 动 转 入 复 位 状 态 和 休 闲 状 态 等 待 ’ 防 止 数 据 丢 失 和 #(9 非 正 常 运 行 ! 提
=@@ 8 " 电 流 @ I %3 * ’ " 经 过 多 次 反 复 实 验 " 结 果 表 明 $
电 机 输 出 频 率 在 ;J%@,K 变 化 时 " 启 动 运 行 平 稳 " 性 能 可 & 下 转 第 ’3 页 ’
!!
计算机应用
放像机上各功能按键的按 动$ 采用这种方法的控制 单元组成如图 - 所示$ 它 由两部分组成# 虚线左边 的部分基本等同于电视机 的控制单元# 但缺少了对 遥控器信号的接收和解码 部分$ 为了降低成本#多台 录放像机可用一种控制单 元但各输出接口具有不同 的地址$ 对录像机的控制也 不再模拟遥控器#而是直接 短路相应的功能按键$ 一般 功能键均是一个无锁的开 关#按动某键#则此键对应 地 开关闭合#而且此开关一端接地$ 这样#如果想通过 接口控制开关实际上让开关的上端接地即可$
第四章 框图流程图课件
2.计数累加:n=n+1,S=S+n;
3.判断“S>2012”是否成立; 4.若成立,输出n,算法结束; 5.若不成立,执行第2步.
NHale Waihona Puke 其他的一些关于流程图的例子:
入库
找书
阅览
借书 出库
还书
流程图
挂号
就诊
住院
办理住院手续
处方划价 缴费 到相应科室 化验或检查 流程图 化验缴费
取药或注射
流程图,是人们将思考的过程和工作(操作) 的顺序进行分析、整理,用规定的文字、符号、图 形的组合加以直观描述的方法。 流程图可用来描述工业生产的流程,称为工序 流程图.
分析问题
弄清关系
写出算法
画出框图
1.选择主线、明确关系、准确选框; 2.遵循从左到右、从上到下的顺序.
作业1:写出求半径为10的圆的面积 的一个算法,并画出流程图. 算法步骤: S1 r 10 ; S2 S r
2
开始
;
r 10
S3 输出 S ;
S r 输出S
结束
2
作业2 写出1+2+3+….+100的 一个算法,并画出流程 图
方案一:
洗水壶 2min 烧开水 15min 洗茶壶杯 3min 取放茶叶 2min 沏茶 1min
方案二:
洗水壶 2min 洗茶壶杯 3min 烧开水 15min 沏茶 1min
取放茶叶
2min
问:上述两种安排哪一种比较省时? 流程图么?
还可以画出其它
某工厂加工某种零件有三道工序:粗加工、返修 加工和精加工。每道工序完成时,都要对产品进行检 验。粗加工的合格品进入精加工,不合格品进入返修 加工;返修加工的合格品进入精加工,不合格品作为 废品处理;精加工的合格品为成品,不合格品为废品 . 用流程图表示这个零件的加工过程.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交流电压采样
计算T和Theta1, Theta2,Theta3
计算 Tc(1+Msin(Theta4))/4 →TAon2
数据储存在缓冲区
处理发送标志位
交流电流采样 计算 Tc(1+Msin(Theta1))/4 →TAon1
发电机电压、电流采样
温度采样
三相时计算 Tc(1+Msin(Theta5))/4 →TBon2 Tc(1+Msin(Theta6))/4 →TCon2
负 载
系统初始化
eCAN初始化 Init_Ecan()
初始化PIE模块的寄存 器到默认状态
初始数据
G(k)=u(k)-Be(k) +Ce(k-1)
f(k)=B`e(k)
禁止CPU中断、 清除CPU中断标志位
清中断标识 使能全局中断
输出u(k)
主电路
蓄 电 池 组 Buck Chopper
否 初始化中断向量表 等待中断 while()
ADC1中断请求
ADC2中断请求
Epwm中断请求
CAN接收中断请求
CAN发送中断请求
配置引脚为ePWM输出
选择内参考源、上电带隙
CANME写0禁止邮箱
保护中断现场
保护中断现场
保护中断现场
Boost升压电压采样 时间基准子模块设置 内部缓冲电路带电、使能ADC 通过寄存器CANMC请求改变数据区 蓄电池端电压、电流采样 比较功能子模块设置 转换触发源设置 设置邮箱的ID、控制、数据和方向
对接收标志置位
发送数据
动作限定子模块设置
转换通道设置
请求正常操作
Hale Waihona Puke 电压PID调节电压PID调节 三相时计算 Tc(1+Msin(Theta2))/4 →TBon1 Tc(1+Msin(Theta3))/4 →TCon1 N 系统正常工作 K+1→K K+1<2N? 否 是 TAon=TAon1+TAon2 (TBon=TBon1+TBon2) (TCon=TCon1+TCon2) K=0
开始
获取给定值r(k)和反馈值c ( k)
开始
e(k)=r(k)-c(k)
|e(k)|≤ε? 是 PID控制 U(k)=Ae(k) +g(k-1) 否 PD控制 U(k)=A`e(k) -f(k-1)
风 力 发 电 机
不 可 控 整 流 电 路 Boost Chopper Inverter circuit
g(k)→g(k-1) f(k)→f(k-1) e(k)→e(k-1)
否 PWM初始化 Init_Epwm() 有中断? 是 是 故障处理 有故障?
返回
CAN通 讯电路
eCAN
PWM波输出
A/D初始化 Init_ADC()
中断处理
积 分 分 离 PID 算 法 系统电源模块
开始
TMS320F28035 AD采样
清中断标志位
清中断标志位
死区产生子模块设置
采样窗口设置
向CANME写1使能邮箱 Y
给蓄电池 充电? N 关闭充电器 Y 系统停止工作
温度异常?
中断返回
中断返回
事件触发子模块设置
结果寄存器设置
返回
启动充电器
返回
返回
中断返回
中断返回
计算T和Theta4, Theta5,Theta6
Pwma.mDuty1=1-TAon (Pwma.mDuty2=1-Tbon) (Pwma.mDuty3=1-Tcon)
温度 保护 电路
IGBT 驱动 电路
电压 采样 电路
电流 采样 电路
单片机
交流电压采样值 N
检测驱动电路 主 程 序 流 程 图 电源
Y
D=DMAX?
调用PID调节调制比M
调用PID调节占空比D
双 电 压 闭 环 控 制 算 法
硬 件 电 路 框 图
Init_Epwm
Init_Adc
Init_Can
中断返回
名
称
小型风力发电控制系统算法及软件的设计 倪堂森 学 号 201103024421
初 始 化 流 程 图
中 断 程 序 流 程 图
设 计 人 专业班级 学 校
电子信息工程学院自动化B114班 华北科技学院 指导教师 张全柱