Sensors and Actuators APhysical
传感器与检测技术英文书籍英语

传感器与检测技术英文书籍英语Sensors and Detection Technologies: A Comprehensive Guide.Introduction.Sensors and detection technologies play a crucial role in various scientific, industrial, and commercial applications. These technologies enable us to measure, monitor, and analyze physical, chemical, and biological parameters in real-time or over time. This guide provides a comprehensive overview of the different types of sensors, their working principles, applications, and advancements in sensing technologies.Types of Sensors.1. Physical Sensors:Pressure sensors: Measure force or pressure applied toan object.Temperature sensors: Detect changes in temperature and provide real-time temperature readings.Position sensors: Determine the position or displacement of an object.Velocity and acceleration sensors: Measure the speed and acceleration of moving objects.2. Chemical Sensors:Gas sensors: Detect and measure the presence and concentration of gases in the environment.Biosensors: Utilize biological recognition elements to detect specific molecules or analytes.Chemical arrays: Employ multiple sensors to provide a comprehensive analysis of chemical composition.3. Biological Sensors:Biosensors: Detect and measure biological substancesor organisms.Microfluidic devices: Enable precise control and manipulation of small fluid volumes for biological analysis.Lab-on-a-chip: Integrate multiple analytical functions into a single portable device.4. Optical Sensors:Optical fiber sensors: Utilize optical fibers to transmit light signals and detect changes in thesurrounding environment.Fiber Bragg grating (FBG) sensors: Measure strain, temperature, and other parameters based on the wavelength shift of reflected light.Surface plasmon resonance (SPR) sensors: Utilize theinteraction of light with metal nanoparticles to detect changes in refractive index caused by specific molecules.Working Principles.Sensors convert physical, chemical, or biological signals into electrical or optical signals. The working principles vary depending on the sensor type:1. Physical Sensors:Piezoelectric sensors: Generate an electrical charge when subjected to mechanical stress or vibration.Thermistors and thermocouples: Change their electrical resistance or generate voltage in response to temperature changes.Potentiometers: Measure position or displacement by varying resistance as a movable contact slides along a resistive element.2. Chemical Sensors:Electrochemical sensors: Utilize electrochemical reactions to generate electrical signals proportional to the analyte concentration.Optical sensors: Detect changes in light absorption, reflection, or fluorescence caused by the presence of specific molecules.3. Biological Sensors:Antibody-based sensors: Employ specific antibodies to bind and detect target molecules or organisms.Nucleic acid-based sensors: Utilize DNA or RNA sequences to detect and analyze specific genetic material.Applications.Sensors and detection technologies find applications in a wide range of fields, including:Environmental monitoring: Air quality, water quality, and soil analysis.Industrial automation: Process control, robotics, and quality assurance.Medical diagnostics: Blood analysis, disease detection, and patient monitoring.Agricultural technology: Crop monitoring, soilnutrient analysis, and pest detection.Aerospace and defense: Navigation, guidance, andtarget detection.Advancements in Sensing Technologies.Miniaturization and integration: Development of smaller, more integrated sensors with improved portability and cost-effectiveness.Enhanced sensitivity and selectivity: Advancements in materials science and signal processing techniques to achieve higher detection limits and reduced false positives.Wireless connectivity: Integration of sensors with wireless communication technologies for remote monitoring and data transmission.Artificial intelligence (AI): Utilization of AI algorithms to enhance sensor performance, analyze data in real-time, and make predictions or recommendations.Conclusion.Sensors and detection technologies are essential tools for scientific research, industrial processes, and various commercial applications. The different types of sensors, their working principles, and recent advancements enable us to gather valuable information, monitor processes, and make informed decisions. Continued research and development in sensing technologies hold the promise of further innovation and expanded capabilities in the future.。
sensors and actuators b-chemical模板 -回复
sensors and actuators b-chemical模板-回复sensors and actuators in chemical industryIntroduction:In the chemical industry, the use of sensors and actuators plays a crucial role in maintaining efficient operations, ensuring product quality, and enhancing safety measures. Sensors are devices that detect changes in the environment and convert them into an electrical signal, while actuators are mechanisms that control or manipulate physical systems. Together, these two technologies form a fundamental part of process control, enabling automation and optimization in chemical manufacturing. In this article, we will explore the various types of sensors and actuators used in the chemical industry and delve into their applications.1. Sensors in the chemical industry:1.1 Temperature sensors:Temperature sensors are widely used in chemical facilities to monitor and control reaction temperatures. They help to ensure that reactions occur at the desired temperature range to achieveoptimum product yields and reduce the risk of unwanted side reactions. Additionally, temperature sensors aid in maintaining safe operating conditions by triggering alarms and shutdown mechanisms when temperatures exceed predefined limits.1.2 Pressure sensors:Pressure sensors are critical in the chemical industry for maintaining optimal operating conditions and ensuring safety. They help monitor and control pressure levels in storage tanks, pipelines, and reactors. By providing real-time pressure data, these sensors enable operators to take corrective actions promptly, preventing overpressure situations that could lead to equipment failure or even catastrophic incidents.1.3 Flow sensors:Flow sensors are utilized to monitor and regulate the flow rate of liquids or gases during chemical processes. Accurate measurement of flow rates is crucial for maintaining product quality and controlling production volumes. Flow sensors also play a vital role in detecting leaks or blockages in pipelines, preventing potential safety hazards and minimizing product losses.1.4 Level sensors:Level sensors are employed to monitor and control the liquid or solid levels in tanks, vessels, and reactors. They help prevent overflow or underflow situations, ensuring consistent process conditions and preventing environmental pollution. Level sensors also aid in inventory management, enabling timely replenishment of raw materials and avoiding production disruptions.2. Actuators in the chemical industry:2.1 Control valves:Control valves are one of the most commonly used actuators in the chemical industry. They regulate the flow rate, pressure, and temperature of fluids within a system. By responding to signals from sensors or control systems, valves modulate the flow of liquids or gases, allowing precise control over process variables. This enables operators to maintain desired conditions, optimize energy consumption, and ensure product quality.2.2 Motorized valves:Motorized valves are employed to control the opening and closing of fluid passages in chemical plants. They are typically used inlarger pipelines or critical systems where manual valve operation may be impractical or unsafe. Motorized valves can be operated remotely, enhancing operational flexibility and enabling rapid response in emergency situations.2.3 Solenoid valves:Solenoid valves are extensively used in the chemical industry for their fast response time and precise control capabilities. These valves use electromagnetic force to open or close fluid passages, making them ideal for applications that require quick and accurate fluid flow control. Solenoid valves are commonly used in automated systems and are invaluable for process optimization, energy efficiency, and safety enhancement.2.4 Pumps and motors:Pumps and motors are critical actuators used in the chemical industry to move fluids within a process. They provide the necessary pressure and flow required for various operations, such as transferring fluids between vessels, circulating cooling or heating media, and mixing reagents. Efficient and reliable pumps and motors are crucial for maintaining process stability, ensuring product consistency, and minimizing energy consumption.Conclusion:Sensors and actuators are essential components in the chemical industry, enabling efficient and safe operations. They play a vital role in monitoring and controlling process variables, optimizing energy consumption, and ensuring product quality. By providing real-time data and enabling precise control, sensors and actuators contribute to increased productivity, reduced waste, and enhanced safety measures. As technology advances, the application of sensors and actuators in the chemical industry will continue to evolve, revolutionizing manufacturing processes and driving innovation in the field.。
激光测距英文资料

0,8
535
0,6.
0,4
-
el~ax ,'
~. IA
Li. . . .
"u..-._~l
0,2 ~0~_--,~~'---~ik .........
-0,2 ,
1
{~
,~
lOOg. -0,ຫໍສະໝຸດ .-O,S -.
.
.
'"
VRF/ UT Fig. 2. Simulationof phase-shifterrors introducedby a real mixer(O) and a mixerwith Q.~...Q6negligiblecapacitiveeffects(O). Comparisonwith the fundamentalphase of Al(t) (A). The circuit is BFR92 transistors, 2Rn= 100 D.,I = 2 mA. emitter-coupled pair (Q~, Q~), increasing the linear input range for the input signal VRF(t) = VRFsin(~ORFt+~O~F).This circuit is in linear operation when the amplitude voltage VRF<elmax=2UT( 1 + grnR~) with u r = k T / q = 2 6 mV (1)
Xia_2010_Sensors-and-Actuators-A-Physical
Sensors and Actuators A 157 (2010) 307–312Contents lists available at ScienceDirectSensors and Actuators A:Physicalj o u r n a l h o m e p a g e :w w w.e l s e v i e r.c o m /l o c a t e /s naActuation mechanism of plasticized PVC by electric fieldHong Xia a ,∗,Midori Takasaki b ,Toshihiro Hirai aa Smart Materials Engineering,Faculty of Textile and Technology,Shinshu University,3-15-1Tokida,Ueda,Nagano 386-8567,Japan bSVBL Center,Faculty of Textile and Technology,Shinshu University,3-15-1Tokida,Ueda,Nagano 386-8567,Japana r t i c l e i n f o Article history:Received 20February 2009Received in revised form 2September 2009Accepted 27November 2009Available online 11 December 2009Keywords:PVC gelsSpace charge distribution Attraction force Maxwell forceInterfacial adhesive forcesa b s t r a c tThe deformation of plasticized poly(vinyl chloride)(PVC)gels in an electric field was considered to result from the electric charging and the interaction between the electrodes.Basic experiments were carried out to investigate the deformation response of PVC gels.PVC and the plasticizer dibutyl adipate (DBA)showed strong polarization phenomena in an external electric field.This was confirmed by a constituent electric response test,in which PVC particles flocked together at the anode and adopted an arrangement of line-like tracks in the electric field due to the contribution of DBA as a solvent,while DBA moved from cathode to anode very quickly.The space charge distribution of PVC gel was clearly different from that of poly(methyl methacrylate)(PMMA)film and silicone film.The intrinsic polarization charges of PVC gel accumulated on the gel surface near the anode,and their intensity was much stronger than for PMMA and silicone.With this comparison the polarization of PVC gel was further confirmed.Furthermore,by using a force measurement method,the Maxwell force and the variation of interfacial adhesive force were evaluated.The force generated in the PVC gels was expected as the result of polarization response of charges,and it mainly took place between the gel and the anode due to the accumulated negative charges on the surface of the PVC gel near the anode.With this force,the PVC gel was deformed asymmetrically,resulting in creeping motion along the anode.Thus the deformation of PVC gels depended on the attractive force between the two electrodes due to the polarization of accumulated charge density in the electric field.© 2009 Elsevier B.V. All rights reserved.1.IntroductionOne of the important aspects of the development of poly-mer actuators is to find or fabricate a material with electrical or dielectric behavior.Recently,many kinds of materials have been developed for polymer actuators such as dielectric elastomers,polymer gels (electrical and dielectric)and so on.At the same time,many analysis methods have been developed for deforma-tion evaluation,electromechanical/electrochemical response and materials structure simulation.For example,Mukai [1]reported that a bucky gel actuator that was based on an ion transfer mecha-nism.Kofod [2]attempted to measure the pressure arising between the two electrodes of a capacitor when it is charged,which is known as the Maxwell pressure and is due to the positive charges on one electrode attracting the negative charges on the other electrode.Plasticized poly(vinyl chloride)(PVC)gel that deforms in response to an applied electric field has been researched as an actuator material for several years in our laboratory [3–5].It is found that although the deformation of PVC gels between two∗Corresponding author.Tel.:+81268215390;fax:+81268215391.E-mail address:s08t107@shinshu-u.ac.jp (H.Xia).parallel electrodes is usually on a small scale,some large defor-mations and different motions can be obtained by controlling the boundary conditions,such as electrode size,shape,the loca-tion of gel or electrodes,and so on.For example,the bending actuator (in which the gel position relative to the length of the electrodes was changed as in Fig.1a)and the variable focal length lens (with anode designed in a cylindrical shape as in Fig.1b)[6–8]were invented in previous studies in our laboratory.For the PVC gels,there exists a special deformation in an applied elec-tric field.This unique performance of PVC gels may be related to their components (polymer and plasticizer),electrochemistry and electromechanical characteristics.Thus the PVC gel is a unique actuator material and can be used to develop various actuators with large deformation and different motions by designing appropriate boundary conditions.Understanding the structure and electrome-chanical/electrochemical response of PVC gels will be important for further polymer actuator development.It is believed that the deformation response of PVC gels results from electric charges,ion transfer and Maxwell force in an applied electric field.Based on this supposition,in the present study we attempt to conduct some basic experiments to determine the motion of chemical reagents,to compare the space charge distri-bution of some dielectric polymer materials,and to measure the forces between the materials and electrodes in electric fields.These0924-4247/$–see front matter © 2009 Elsevier B.V. All rights reserved.doi:10.1016/j.sna.2009.11.028308H.Xia et al./Sensors and Actuators A157 (2010) 307–312Fig.1.Applications of the PVC gel actuator.(a)Image of a bending actuator;(b)variable focal length lens.experiments will be helpful to clarify the deformation mechanism of PVC gels in an applied electric field.2.Experimental2.1.Materials and displacement measurementPlasticized PVC was made from commercial PVC powder (n =3700),with tetrahydrofuran (THF)solvent and dibutyl adipate (DBA)plasticizer.The ratio of PVC:DBA is 10:90%(w/w)[9].PVC was dissolved in the THF/DBA mixture,and then the THF was evap-orated at room temperature for 3–5days to give a soft,gel-like dielectric elastomer with high transparency.PVC gel was set between two parallel electrodes under a polar-ized light microscope.When an electric field was applied,a camera recorded the deformation of the gel,and its corresponding displace-ment was measured using image analysis software.2.2.Electric response testIn the electric field the PVC gel showed a creeping motion between the two electrodes.To investigate this mechanism,PVC particles and paper scraps were put into DBA,and set between two parallel electrodes under the polarized light microscope,as shown in Fig.2,to observe the motion of the PVC particles and paper scraps in an applied electric field.The distance between the two electrodes was 3mm and the applied DC voltage was 1000V.Fig.2.Setup for reagent electric responsetest.Fig.3.The principle of the pulsed electroacoustic (PEA)method.2.3.Space charge measurementThe space charges for PVC gels with varying DBA contents,PMMA film and silicone film were measured with a pulsed elec-tro acoustic (PEA)method.The principle of PEA measurement is shown in Fig.3.The samples were set between two electrodes at a specified pressure,and a distribution of space charge was obtained when an electric field was applied.The PVC:DBA ratios %(w/w)used were 10:0,10:25,10:50and 10:90.The sample size was at least 10mm ×10mm,and the thickness was about 1mm.The applied electrical fields were 500,1000,2000and 3000V mm −1.2.4.Force measurementIt is thought that the deformation of PVC gel occurs due to the interaction of charges [10]and/or the attractive force between two charged electrodes.We used the setup of Fig.4to measure the force between electrode and PVC gel.The side of the bottom electrode with an insulating layer was fixed to the stage that was moved up and down by a screw that was used to control the pressure on the sample.Since the gel was very soft,the deformation of the gel and the distance between the two electrodes may have had an influ-ence on the test results.For that reason the force sensor was used to adjust the pressure close to zero.When the DC voltage was turned on (with the upper electrode positive and the bottom electrode neg-ative)for 20s and turned off,then tuned on again with the opposite polarity for another 20s as depicted in Fig.5,the forces generated between the anode and cathode were measured.In the same way,a force–voltage curve for silicone film was measured for compari-son.The specimen (15mm ×10mm and 0.5mm thick)for thePVCFig.4.The setup for force measurement between the electrode and sample.(1)Force gauge;(2)an insulation holder;(3)electrodes;(4)PVC gel;(5)DC source;(6)an insulating layer fixed on a moveable stage.H.Xia et al./Sensors and Actuators A157 (2010) 307–312309Fig.5.The applied electricfield for force measurement.gels was in the form of a sandwich between the two electrodes.The applied voltage was varied from400to1000V.3.Results and discussion3.1.Displacement associated with PVC gel deformationPVC gel had a creeping motion as shown in Fig.6when it was charged.This deformation is usually difficult to measure,but it may appear in locations such as at an edge of the gel,at the interface between gel and electrode,and so on,where the local displace-ment can be easily observed.Fig.7shows the displacement at the corners of a PVC gel near the electrodes,at point1and point2 (Fig.7(a)and(b)),for a specimen with thickness500m before and after charging.The displacement at point1corresponding to deformation along the anode increased up to about250m,and the displacement at point2from the cathode was up to about 300m,when the voltage was increased to1000V.The displace-ments at points1and2reached more than50%of the sample thickness.These local displacements showed that the deformation area increased significantly with increase of the applied voltage. Using the local displacement,various actuations were obtained by changing boundary conditions.The deformation process may be conceptualized as follows. Together with the transfer of constituents due to the polarization of charges,the extent of migration of charges in PVC gel varies with the location,and the attractive force near the edge of the sample resulted in two stress components(F1and F2in Fig.6).The stress component,F2,parallel to the anode caused shear deformation at the edge and facilitated the creeping motion in the gel.3.2.Constituent electric responseTo confirm the transfer of constituents in the PVC gels,Fig.8 shows a test to observe the motion of particles in DBA,in anelectricFig.6.Schematic of PVC geldeformation.Fig.7.The displacement in PVC gel deformation as a function of applied voltage.(a and b)Polarized light microscope photographs;(c)displacement curves of point1and point2with different DC voltages.310H.Xia et al./Sensors and Actuators A157 (2010) 307–312Fig.8.The polarized light microscope photographs of constituent electric response test results.(a)–(c)are the motion of paper scraps;(d)–(f)show PVC particles in the plasticizer DBA in an electric field of 1kV.field.The polarized light microscope photographs in Fig.8show the motion of PVC particles and scraps of paper in an electric field of 1000V.In Fig.8a,in the absence of the electric field,the paper scraps were static in the center of the area between the electrodes.When the electric field was turned on,the paper scraps moved to the anode (upper side in Fig.8b)within about 0.5s.When the elec-tric field was reversed the paper scraps again moved to the anode side (lower side in Fig.8c)with a slightly longer time due to the longer distance.One of the paper scraps remained near the upper electrode due to adhesion between the surface fibers of the paper and the electrode.For comparison,when the paper scraps were put between two electrodes with water or air in place of DBA,they did not move in the electric field.The motion of the paper scraps in DBA implies that DBA flowed from the cathode to the anode when the electric field was applied.Fig.8d–f shows the motion of PVC particles in DBA in an elec-tric field of 1000V.The PVC particles were randomly distributed in the absence of the electric field (Fig.8d).When the electric field was applied,the PVC particles began to move in a circular fash-ion close to the anode (upper electrode;Fig.8e)in line-like tracks.When the polarity was reversed the PVC particles began to depart from the cathode (upper electrode)and moved to the anode (the lower electrode)again in a line-like arrangement (Fig.8f).This phe-nomenon did not occur with PVC particles in water.It is thought that DBA may be a type of electrorheological (ER)fluid whose vis-cosity increased when the electric field was applied,and the ER effect should thus occur in a line-like arrangement of PVC particles in DBA.However,for the dispersion of PVC particles in water the viscosity increase does not occur since water is not an ER fluid.Due to the movement and viscosity increase of DBA by the electric field,the gel surface near the anode is more adhesive than is the surface near the cathode.From the viewpoint of the molecular microstructure,both PVC and DBA have strong polarizability due to the existence of C–Cl and C O bonds.Under the influence of the polarizable solvent,the dipole moment (C–Cl)of PVC may cause molecules to beordered in some fashion and the C O bonds [11–12]made solvent move from cathode to anode in an electric field;these processes may also occur in a PVC gel.The PVC gel is a physical gel and a mixture of PVC polymer and plasticizer,such as DBA,and the optimum composition of PVC gels for actuating appears to be 10%PVC/90%plasticizer.Thus,the mesh size of the gel network in PVC gels is large and their crosslink points may be not very strong.When an electric field is applied to PVC gel,the network of PVC polymer chains may become ordered,although not as eas-ily as in the liquid phase.This structural reorganization in PVC gels facilitates DBA movement.When the plasticizer molecules accumulate at the anode,the gel deformation will become large and will extend to both sides along the anode (see Fig.6).This is one reason why the deformation of PVC gel always occurs on the anode.3.3.The distribution of space chargeAccording to the electric/chemical behavior discussed above,charge transfer may cause interior charges to accumulate on the gel surface when an electric field is applied,and this will have an influence on the deformation of the materials [13–14].In order to confirm the charge transfer in PVC gels,space charge measurement by the PEA method was carried out.Fig.9shows the space charge density of PVC gels,PMMA film and silicone film.For the PVC gels,negative charges accumulated on the gel surface near the anode and its space charge density was much higher than for the other two materials.For the PMMA film and silicone film,there was almost no accumulation of charge between the two electrodes,while a weak peak of injection electronic charge was observed on the sil-icone film surface near the anode.Although charge accumulation already exists in pure PVC,for the PVC gels with DBA the polariza-tion became much stronger due to the contribution of the polarized response of the DBA.Figs.10and 11show the induction and accumulation charge densities,respectively,of PVC samples in different electric fields.H.Xia et al./Sensors and Actuators A 157 (2010) 307–312311Fig.9.The space charge distribution of PVC gel,PMMA and siliconefilm.Fig.10.The induction charge density of PVC gels with varying DBA content in various electric fields.For pure PVC the space charge density of both induction charges and accumulation charges were almost unchanged when the electric field increased.However,for the PVC gels with DBA,the induction charges increased almost linearly and the density of accumulation charge also showed an increasing tendency with increase of the applied electric field,except for the PVC gel with 50wt%DBA in the 3kV electric field.The PVC gel with 90wt%DBA had the largest DBA content of all of the samples,but its space charge density for both the induction and accumulation charges was not thelargest.Fig.11.The accumulation charge density of PVC gels with different DBA contents in various electricfields.Fig.12.The force curves between PVC gel and the electrodes at different voltages.Thus,it was found that the DBA content has a great influence on the space charge density and there may be an optimum content of DBA for higher polarization response.3.4.Force measurementUsing the high resolution of the force sensor in the force mea-surement setup in Fig.4,we were able to measure the force acting on the samples between the two electrodes.Fig.12shows the measured force for the PVC gel with 90wt%DBA during periods with the electric field ON and OFF.Corresponding to the ON and OFF periods of the electric field and their duration,the measured force curves varied significantly.When the applied electric field was ON with the upper electrode positive (see Fig.4),an induced force was immediately observed.For example,for the 800V elec-tric field about 0.004N was measured,which can be considered as a Maxwell force between the two electrodes.With progressive deformation,the contact area between the PVC gel and the bottom electrode decreased (see Figs.6and 7)and this may have resulted in the reduction of the attractive force.Thus the measured force decreased after the electric field was switched ON,after which the applied voltage was OFF for a period of time.When the electric field was turned ON again with opposite polarity (bottom electrode positive),an induced force was again immediately observed with almost the same magnitude as in the first step.The force then clearly increased during the electric field ON period,because when the electric field was turned OFF recov-ery of the interior polarization state required time even though the gel deformation was recovered.The polarization of C**O C=O bonds and electric charge accumulation on the surface may change sur-face wettability [15–18]and the interfacial adhesive properties of PVC gel.This results in adhesion between the PVC gel surface and the upper electrode even after the electric field was turned OFF.The adhesive force maintained the contact of the upperelectrodeFig.13.The force curves between silicone film and the electrodes at different volt-ages.312H.Xia et al./Sensors and Actuators A157 (2010) 307–312with the PVC gel,and when the electricfield was applied again with opposite polarity an attractive force between the PVC gels and bottom electrode occurred and pulled the PVC gels together with the upper electrode.With progressive PVC gel deformation, the force increased due to increase of the contact area between the PVC gel and the bottom electrode.However,for the siliconefilm (Fig.13),irrespective of the polarity of the upper and bottom elec-trodes the force curve was symmetrical.This was confirmed by the space charge distribution of the siliconefilm in Fig.9where the accumulation charges are distributed uniformly with neutraliza-tion.4.ConclusionIn this study we carried out some basic experiments to elucidate the motion of the chemical constituents and to measure the forces between PVC gel and electrodes.We successfully implemented a method for measuring the force between the two electrodes,that enabled not only the Maxwell force but also the variation of inter-facial adhesive forces to be measured.The force generated in the PVC gels was expected as the result of the polarization response of charges and has a strong dependency on the intensity of the elec-tricfield.In the constituent electric response tests,we found that PVC particles in the plasticizer DBA moved to the anode in line-like tracks.And the DBA moved quickly from the cathode to anode by the motion of paper scraps in DBA.The polarization phenomenon was also observed in the space charge measurement.The space charge density on the anode was much higher than for PMMA and siliconefilms.According to the results of these measurements,the PVC and DBA moved to the anode,and the negative charges accu-mulated on the surface of PVC gel near the anode.These results may well support the Maxwell force arising from the polarization of charges and the deformation of PVC gels that occurred on the anode.With this force,the PVC gel is deformed asymmetrically and stretched along the anode.The deformation of PVC gel increased with increase of the Maxwell force,which depends strongly on the applied electricfield.AcknowledgmentsThis work was partly supported by a Grant-in-Aid for Global COE Program by the Ministry of Education,Culture,Sports,Science,and Technology.We also acknowledge Professor Minoru Hashimoto and Ms.Misaki Yamano for their device support.Appendix A.Supplementary dataSupplementary data associated with this article can be found,in the online version,at doi:10.1016/j.sna.2009.11.028.References[1]K.Mukai,K.Asaka,K.Kiyohara,T.Sugino,I.Takeuchi,T.Fukushima,T.Aida,High performance fully plastic actuator based on ionic-liquid-based bucky gel, Electrochmica Acta53(2008).[2]G.Kofod,R.Kornbluh,R.Pelrine,P.Sommer-Larsen,Actuation response ofpolyacrylate dielectric elastomers,Journal of Intelligent Material Systems and Structures14(12)(2003)787–793.[3]T.Hirai,The present and the future of polymer actuators,Polymer Preprints,Japan56(1)(2007).[4]Md.Z.Uddin,M.Watanabe,H.Shirai,T.Hirai,Creeping and novel huge bendingof plasticized PVC,Journal of Robotics and Mechatronics14(2)(2002).[5]Md.Z.Uddin,M.Yamaguchi,M.Watanabe,H.Shirai,T.Hirai,Electricallyinduced creeping and bending deformation of plasticized poly(vinyl chloride), Chemistry Letters(2001).[6]O.Kinoshita,T.Hirai,The circular creep deformation and the bending actua-tion of DBP content PVC gel by applying an electricfield,in:3rd International Conference on Advanced Fiber/Textile Materials2005in Ueda,25–27August, 2005.[7]O.Kinoshita,The specific actuation of plasticizer component PVC gel and theapplication by an electricfield,master’s thesis,P33–P58,2005.[8]K.Fujii,T.Hirai,Influence of the plasticizer on the electrical deformation of PVC,in:3rd International Conference on Advanced Fiber/Textile Materials2005, Ueda,25–27August,2005,pp.P144–P145.[9]S.Arora,T.Ghosh,J.Muth,Dielectric elastomer based prototypefiber actuators,Sensors and Actuators A136(2007)P321–P328.[10]M.Watanabe,Bending electrostriction and space–charge distribution inpolyurethanefilms,Journal of Applied Physics94(4)(2003).[11]Poly(Vinyl Chloride)–The Chemistry and Industry,Kinki Chemistry and Indus-try,1961.[12]H.Luther,W.Stein,Z.Elektro-Chem.60(1956)1115.[13]P.-D.Hong,J.-H.Chen,Network structure and chair mobility of freeze-driedpolyvinyl chloride/dioxane gels,Polymer39(23)(1998)5809–5817.[14]P.-D.Hong,J.-H.Chen,Structure and properties of polyvinyl chloride physicalgels,Polymer39(3)(1998)711–717.[15]N.Guarrotxena,et al.,Exploration of the space charge behavior of polyethyleneusing measurement of thermally stimulated discharge current coupled with the determination of space charge distribution by the thermal step method in hydrogenated poly(vinyl chloride),Polymer40(1999)2639–2648.[16]M.Yedji,G.G.Ross,Effect of electric charge accumulation on surface proper-ties of PS samples irradiated with low energy ions,Nuclear Instruments and Methods in Physics Research B256(2007)P396–401.[17]P.Iemura,Mitiou,Introduction to Electric Magnetic,p.P106.[18]P.-D.Hong,H.-T.Huang,Effect of polymer–solvent interaction on gelation ofpolyvinyl chloride solutions,European Polymer Journal35(1999)2155–2164. BiographiesHong Xia B.E.degree from Zhejiang Sci-Tech University,China,1982.M.S.degree from Kyoto Institute of Technology,Japan,1995.At present a Ph.D.student at Shin-shu University,Japan.Researchfield:the deformation mechanism and measurement methods of polymer actuators.Midori Takasaki:Ph.D.degree from Tokyo Institute of Technology,Japan,2002.At present an Assistant Professor at the Satellite Venture Business Laboratory,Shinshu University,Japan.Main research:fiber engineering,high performance polymers. Toshihiro Hirai:Ph.D.(Engineering)degree from Osaka Prefecture University, Japan,1976.At present,the Dean of the Faculty,the leader of Global COE Program International Center of Excellence on Fiber Engineering and Professor of Shinshu University,Japan.Main research:development of artificial muscle from polymer materials,active transport membrane system,analysis offlow dynamics in narrow gel tubing,control of enzyme activity and so on.。
测控技术与仪器专业英语unit

全句译为:然而,微处理器技术的出现使得传感器必须要 有电信号输出,这样便于接口以实现无人测控。
8
Unit3 Smart Sensors
That also required the analog signal level to be amplified and converted to digital format prior to (在……之前) being supplied to the process controller. Today’s MCUs and analog-to-digital (A/D) converters typically have a 5V power supply, which has dictated the supply voltage for many amplified and signal conditioned sensors.
译为:应用微电子技术之前,传感器或转换器用于测量 物理量,如温度,压力,流量,通常直接与读数装置相连, 通常一个仪表有一个观察员读数。
6
Unit3 Smart Sensors
The transducer converted the physical quantity being measured to a displacement. The observer initiated system corrections to change the reading closer to a desired value. The typical blocks of a measurement system are shown in Figure 3.1.
译为:在今天几乎一切的技术领域都将智能一词作为 其前缀的候选。智能传感器这一术语是在20世纪80年代 中期出现的,从那以后,一些设备已被称之为智能传感器。
微系统技术介绍
2
1 What Is MICROSYSTEMS
微系统是以微电子技术、射频与无线电技术、光学(或光电子学) 技术、微机电系统(MEMS)等技术为核心,从系统工程的高度出 发,通过封封、互连等精细加工技术,在框架、基板等载体上制 造、装配、集成微小型化功能装置。
我们所讨论的微系统大量应用于信息工程领域,因此微系统也可 以称为信息工程微系统。
4、什么是微电子封装(Microelectronic Packaging)
5、微电子封装发展进程(Development)
6、微系统封装技术的地位和作用(Role)
7、微系统封装中的技术挑战(The Challenge)
4/13/2020
13
2 微系统相关技术基础
Microsystems Products And Related Technologies Relations
4/13/2020
7
1 What Is MICROSYSTEMS
微系统与集成电路制造的关系(Cont.)
• 因此,微系统的整个制造过程,即芯片加工、集成组装、封装测试等要 比集成电路制造过程复杂得多。
• 微系统技术的发展已经使许多高速信息处理、大容量存储、超低功耗的 电子产品成为现实,未来的微系统产品将覆盖人类生活的方方面面。
4/13/2020
8
1 What Is MICROSYSTEMS
Typical 微系统产品
Smart Watches
4/13/2020
9
1 What Is MICROSYSTEMS
Typical 微系统产品
Multimedia Personal
Communication Terminal
MEMS 版杂志投稿
MEMS 版 (精华区)发信人: dtl (意大利,蓝色的梦,远走), 信区: MEMS标题: [合集] 请问关于MEMS的SCI杂志有哪些?发信站: BBS 水木清华站 (Mon Jun 28 22:47:25 2004), 站内☆─────────────────────────────────────☆memsgg (小猪) 于 (Wed Jun 2 23:11:13 2004) 提到:我知道的有Sensors and ActuatorsIEEE sensor JournalJMMJMEMSMicrosystem TechnologySmart materials and structures请各位大虾补充另外请介绍一下各个杂志的影响因子、发表的难易程度以及侧重方向。
兄弟有一篇关于器件集成工艺方面的文章,不知发到哪里好。
☆─────────────────────────────────────☆moran (MOrality & RAtioNality) 于 (Thu Jun 3 09:48:30 2004) 提到:Journal IF2002 点评JMEMS 2.835 MEMS领域最牛的杂志,不过没有电子投稿J. Micromech.Microeng 1.755 MEMS影响范围最广的杂志(或许是),方便投稿Sensors and Actuators B 1.893 好像是化学类的,看得少SMAR T MATER STRUCT 1.439 不了解Microscale Therm. Eng. 1.403 微尺度机理方面的牛杂志,不过每期文章太少Sensors and Actuators A 1.299 器件方面影响力最大的杂志,估计很多人投过Microelectronic Eng. 0.900 不了解,我师兄中过Microelectronics Inter. 0.457 不了解Microsystem Technology 0.341 不了解SENSORS AND MATERIALS 0.029 不了解,不知道为什么这么低的if物理类子学科的最高境界当然是能在物理顶级刊物上发文了,除考古、生物外能在下面的任何一个期刊上发文都是很了不起的事情(物理系的兄弟也除外),以下可以与MEMS相关的期刊Science 28.956Physical Review Letter 7.323Applied Physics Letters 4.207Physical Review E 2.397Journal of Applied Phys 2.128国内的总类期刊也有一些,例如Chinese Science Bulletin. 0.570 虽然比中国科学的影响因子高,但水平未必SCI in China E 0.412 国内比较难投的期刊......【在 memsgg (小猪) 的大作中提到: 】: 标题: 请问关于MEMS的SCI杂志有哪些?: 发信站: BBS 水木清华站 (Wed Jun 2 23:11:13 2004), 站内:: 我知道的有: Sensors and A ctuators: IEEE sensor Journal: JMM: JMEMS: Microsystem Technology: Smart materials and structures: 请各位大虾补充: 另外请介绍一下各个杂志的影响因子、发表的难易程度以及侧重方向。
Sensors and Actuators A
Sensors and Actuators A: PhysicalVolume 132, Issue 1, 8 November 2006, Pages 147–153The 19th European Conference on Solid-State TransducersA thermal convective accelerometer system based on a siliconsensor—Study and packaging∙a Technologi c al Educational Institution (TEI) of Athens, Department of Electroni c s, 12210 Egaleo, Athens, Greece∙∙∙∙∙liquids. The effect of the different liquid viscosities on the sensor characteristics was examined. The dependence of the accelerometer signal on both frequency and acceleration was determined for various configurations. It was found that depending on the packaging configuration the 3 db cut-off signal can be adjusted from some Hertz to several hundreds of Hertz. The sensitivity of the device as well as the accuracy of the waveform shapes can also be adjusted by regulating specific packaging parameters. A specially designed electronic interface was implemented for interface and controlling the input and output signals of the accelerometer. Different modes of operation were considered in order to improve the long term stability of the device.Keywords∙Thermal sensor;∙Accelerometer;∙Packaging;∙Interface circuitFig. 1. Experimental set-up, used for PSTA characterization.View in workspaceFig. 2. PSTA tank-shaped housing.View in workspaceFig. 3. PSTA response at 1 Hz square pul s es of 2 g acceleration for two oil types in the CFP case.View in workspaceFig. 4. PSTA response at 1 Hz square pul s es of 2 g acceleration for two oil types in the PView in workspaceView in workspacefunction of frequency forView in workspaceFig. 8. Normalized sensitivity of the PSTA for 2 g acceleration, as a function of frequency for different oil types and package configurations.View in workspaceFig. 9. PSTA background signal and heating resistance variations for 17 h of operation in constant voltage mode. The voltage applied to the sensor was of 12 V.View in workspaceFig. 10. Block diagram of the interface circuit.View in workspaceFig. 11. PSTA background signal and heating resistance variations for 22 h of operation in constant powerView in workspacebackground signal and heating resistanceView in workspaceCopyright © 2006 Elsevier B.V. All rights reserved.Dr. Grigoris Kaltsas received BSc degree in Physics from National University of Athens in 1993. He joined the Institute of Microelectronics of NCSR “Demokritos” in 1993 as a PhD student and he received his PhD in the field of thermal integrated sensors, from the TechnicalUniversity of Athens, in 1999. He has worked in the field of silicides from 1993 to 1994 and then on fabrication and characterization of thermal integrated sensors using porous silicon technology, focusing in the field of flow and acceleration sensors. He is now as sistant professor in the technical Institution of Athens (TEI).Dr. Dimitris Goustouridis was born in 1969. He received the BS in 1992 from the Department of Physics of the University of Patras. In 2002 he received the PhD degree in microelectronics from the Department of Applied Sciences of National Technical University of Athens for his work on capacitive type pressure sensors. He is currently with the Institute of Microelectronics at NCSR “Demokritos”. His interests include silicon sensors and pressure s ensors in particular, and silicon micromachining.Dr. Androula Nassiopoulou is the director of the Institute of Microelectronics (IMEL) at NCSR Demokritos since 1997. IMEL is the Greek National Center of Excellence in Micro, Nanotechnologies and Systems. Her current research interests are in the field of semiconductor nanostructures for nano- and optoelectronic devices, nanocrystal memories, sensing, etc. and in the field of silicon sensors and microfluidics. She is at the head of the group on silicon nanostructures and their applications at IMEL. She is member of the Advisory group of experts on Nanotechnology (NMP) of the EU 6th Framework Program for Research and Technology and she coordinates an important number of EU and national research projects in the above fields. She chaired or co-chaired several National and International Conferences and Symposia, including two successful E-MRS Symposia related with nanostructured semiconductors. For more information please see at www.imel.demokritos.gr.FDr. Grigoris Kaltsas received BSc degree in Physics from National University of Athens in 1993. He joined the Institute of Microelectronics of NCSR “Demokritos” in 1993 as a PhD student and he received his PhD in the field of thermal integrated sensors, from the Technical University of Athens, in 1999. He has worked in the field of silicides from 1993 to 1994 and then on fabrication and characterization of thermal integrated sensors using porous silicon technology, focusing in the field of flow and acceleration sensors. He is now assistant professor in the technical Institution of Athens (TEI).Dr. Dimitris Goustouridis was born in 1969. He received the BS in 1992 from the Department of Physics of the University of Patras. In 2002 he received the PhD degree in microelectronics from the Department of Applied Sciences of National Technical University of Athens for his work on capacitive type pressure sensors. He is currently with the Institute of Microelectronics at NCSR “Demokritos”. His interests include silicon sensors and pressure sensors in particular, and silicon micromachining.Dr. Androula Nassiopoulou is the director of he Institute of Microelectronics (IMEL) at NCSR Demokritos since 1997. IMEL is the Greek National Center of Excellence in Micro, Nanotechnologies and Systems. Her current research interests are in the field of semiconductor nanostructures for nano- and optoelectronic devices, nanocrystal memories, sensing, etc. and in the field of silicon sensors and microfluidics. She is at the head of the group on silicon nanostructures and their applications at IMEL. She is member of the Advisory group of experts on Nanotechnology (NMP) of the EU 6th Framework Program for Research and Technology and she coordinates an important number of EU and national researchprojects in the above fields. She chaired or co-chaired several National and International Conferences and Symposia, including two successful E-MRS Symposia related with nanostructured semiconductors. For more information please see at www.imel.demokritos.gr.The following popper user interface control may not be accessible. Tab to the next button to revert the control to an accessible version.Destroy user interface controlDisplay Settings:AbstractThe following popper user interface control may not be accessible. Tab to the next button to revert the control to an accessible version.Destroy user interface controlSend to:Sensors (Basel). 2012;12(1):233-59. doi: 10.3390/s120100233. Epub 2011 Dec 28.A theoretical model to predict both horizontal displacement andvertical displacement for electromagnetic induction-based deep displacement sensors.Shentu N, Zhang H, Li Q, Zhou H, Tong R, Li X.SourceState Key Laboratory of Industry Control Technology, Zhejiang University, Hangzhou, Zhejiang 310027, China. stnying_2@AbstractDeep displacement observation is one basic means of landslide dynamic study and early warning monitoring and a key part of engineering geological investigation. In our previous work, we proposed a novel electromagnetic induction-based deep displacement sensor (I-type) to predict deep horizontal displacement and a theoretical model called equation-based equivalent loop approach (EELA) to describe its sensing characters. However in many landslide and related geological engineering cases, both horizontal displacement and vertical displacement vary apparently and dynamically so both may require monitoring. In this study, a II-type deep displacement sensor is designed by revising our I-type sensor to simultaneously monitor the deep horizontal displacement and vertical displacement variations at different depths within a sliding mass. Meanwhile, a new theoretical modeling called the numerical integration-based equivalent loop approach (NIELA) has been proposed to quantitatively depict II-type sensors' mutual inductance properties with respect to predicted horizontal displacements and vertical displacements. After detailed examinations and comparative studies between measured mutual inductance voltage, NIELA-based mutual inductance and EELA-based mutual inductance, NIELA has verified to be an effective and quite accurate analytic model for characterization of II-type sensors. The NIELA model is widely applicable for II-type sensors' monitoring on all kinds of landslides and other related geohazards with satisfactory estimation accuracy and calculation efficiency.PMID:22368467[PubMed - indexed for MEDLINE]PMCID:PMC3279211Free PMC ArticleImages from this publication.See all images (12) Free textThe following toggler user interface control may not beaccessible. Tab to the next button to revert the control to an accessible version.Destroy user interface control Publication Types, MeSH Terms Publication Types∙Research Support, Non-U.S. Gov'tMeSH Terms∙Electricity∙Electromagnetic Phenomena*∙Geology/instrumentation*∙Landslides*∙Models, Theoretical*∙Numerical Analysis, Computer-Assisted∙Photography∙Reproducibility of ResultsThe following toggler user interface control may not be accessible. Tab to the next button to revert the control to an accessible version.Destroy user interface control LinkOut - more resourcesFull Text Sources∙Europe PubMed Central∙PubMed Central∙PubMed Central CanadaOriginal ArticleA tactile sensor for detection of physical properties of human skin in vivo1998, V ol. 22, No. 4 , Pages 147-153∙PDF (1290 KB)∙PDF Plus (413 KB)∙Reprints∙PermissionsO. A. Lindahl1, S. Omata2 and K.A. ängquist31Departments of Biomedical Engineering, University Hospital of Northern Sweden, S-901 85, Umeå, Sweden2Departments of Surgery, University Hospital of Northern Sweden, S-901 85, Umeå, Sweden3College of Engineering, Nihon University, Koriyama Fukushima, 963, JapanA spring loaded tactile sensor with displacement sensing has been evaluated for non-invasive assessment of physical properties, stiffness and elasticity, of human skin in vivo. The tactile sensor consists of a piezoelectric vibrator (61 kHz) with a vibration pickup, electronics and PC with software for measurement of the change in frequency when the sensor is attached to an object. Integrated with the tactile sensor is a displacement sensor that shows the compression of the spring that loads the sensor element against the object during measurement. Under certain conditions (e.g. fixed contact pressure) this change in frequency monitors the acoustic impedance of the object and is related to the stiffness of soft tissue. The experimental results on silicone gum and on healthy Japanese and Swedish women indicated that the instrument was able to detect changes in stiffness and elastic related properties of human skin, related to age, day-to-day variations and application of cosmetics. The instrument was concluded to be easy to handle and suitable for field work.∙PDF (1290 KB)∙PDF Plus (413 KB) - What is PDF Plus?Read More: /doi/abs/10.3109/03091909809032532Issue TOC | Previous Article | Next ArticleOriginal ArticlesDesign of inductive sensors for tongue control system for computers and assistive devicesJuly 2010, V ol. 5, No. 4 , Pages 266-271 (doi:10.3109/17483101003718138)∙HTML∙PDF (989 KB)∙PDF Plus (990 KB)∙Reprints∙PermissionsEugen R. Lontis, Lotte N. S. A. StruijkDepartment of Health Science and Technology, Center for Sensory Motor Interaction, SMI, Aalborg, DenmarkE. R. Lontis, Department of Health Correspondence: Science and Technology, Center for Sensory Motor Interaction, SMI, Fredrik Bajers V ej 7, D3, 9220 Aalborg East, Denmark. E-mail: lontis@hst.aau.dkPurpose.The paper introduces a novel design of air-core inductive sensors in printed circuit board (PCB) technology for a tongue control system. The tongue control system provides a quadriplegic person with a keyboard and a joystick type of mouse for interaction with a computer or for control of an assistive device.Method.Activation of inductive sensors was performed with a cylindrical, soft ferromagnetic material (activation unit). Comparative analysis of inductive sensors in PCB technology with existing hand-made inductive sensors was performed with respect to inductance, resistance, and sensitivity to activation when the activation unit was placed in the center of the sensor. Optimisation of the activation unit was performed in a finite element model.Results.PCBs with air-core inductive sensors were manufactured in a 10 layers, 100 μm and 120 μm line width technology. These sensors provided quality signals that could drive the electronics of the hand-made sensors. Furthermore, changing the geometry of the sensors allowed generation of variable signals correlated with the 2D movement of the activation unit at the sensors' surface.Conclusion.PCB technology for inductive sensors allows flexibility in design, automation of production and ease of possible integration with supplying electronics. The basic switch function of the inductive sensor can be extended to two-dimensional movement detection for pointing devices.KeywordsPrinted circuit board inductor, assistive devices, disabled people, tongue control, keyboard and pointing devices, computer interface∙HTML∙PDF (989 KB)∙PDF Plus (990 KB) - What is PDF Plus?Read More: /doi/abs/10.3109/17483101003718138Analog Integrated Circuits and Signal ProcessingJune 2006, V olume 47, Issue 3, pp 293-301A high precision temperature control system for CMOS integrated wide range resistive gas sensors∙Giuseppe Ferri,∙Vincenzo StornelliLook Inside Get AccessAbstractIn this work we present an integrated interface for wide range resistive gas sensors able to heat the sensor resistance through a constant power heater block at 0°C–350°C operating temperatur es. The proposed temperature control system is formed by a sensor heater (which fixes the sensor temperature at about 200°C), a R/f (or R/T) converter, which converts the resistive value into a period (or frequency), and can be able to reveal about 6 decades variation (from 10 KΩ up to 10 GΩ), and a digital subsystem that control the whole systems loop. This interface allows high sensibility and precision and performs good stability in temperature and power supply drift and low power characteristics so it can be used also in portable applications. Test measurements, performedon the fabricated chip, have shown an excellent agreement between theoretical expectations and simulation results.Giuseppe Ferri is an associate professor in Electronics at the Department of Electrical Engineeri ng of L’ Aquila University, Ital. In 1993 he has been a visiting researcher at SGS-Thomson Milano, working in bipolar low-voltage op-amp design. In 1994-95 he has been visiting researcher at KU Leuven working in low-voltage CMOS design in the group of Prof. Sansen. His research activity is actually centred on the analog design of integrated circuits for portable applications (e.g., sensors and biomedicals) and circuit theory. He is co-author of a book entitled “Low Voltage, Low Power CMOS Current Conveyors”, Kluwer ed. (2003) and four text-books in Italian on Analogue Microelectronics (2005, 2006). Moreover, he is author and co-author of 74 papers on international and Italian journals and 123talks at national and international conferences.Vincenzo Stornelli was born in A vezzano (AQ), Italy, on May 31, 1980. He received the Electronics Engineering degree (cum laude) in July 2004. In October 2004 he joined the Department of Electronic Engineering, University of L’Aquila, where he is actually involved with problems concerning project and design of integrated circuits for RF and sensor applications, CAD modelling, characterization, and design analysis of active microwave components, circuits, and subsystems. He regularly teaches courses of the European Computer patent and has regular collaborations with national corporations such as Thales ItaliaPage %PClose Plain textLookInsideShareShare this content on Facebook Share this content on Twitter Share this content on LinkedIn Other actionsExport citations∙Register for Journal Updates ∙About This Journal∙Reprints and Permissions。
sensors and actuators b-chemical模板

sensors and actuators b-chemical模板"Sensors and Actuators in Chemical Engineering: Enhancing Process Efficiency and Control"Introduction:Chemical engineering plays a crucial role in numerous industries, including pharmaceuticals, petrochemicals, and food processing. The advancement in technology has allowed chemical engineers to employ sensors and actuators in their field to enhance process efficiency and control. This article will delve into the importance of sensors and actuators, their applications in chemical engineering, and the benefits they offer in terms of process optimization, safety, and cost-effectiveness.1. Sensors in Chemical Engineering:Sensors are essential devices that gauge specific parameters in a chemical process. They can measure various factors such as temperature, pressure, flow rate, pH level, conductivity, and concentration of substances. The data provided by sensors helps engineers monitor and control processes, ensuring optimalperformance. For example, temperature sensors allow precise control of reaction rates, while pressure sensors ensure safety by preventing excessive pressure build-up.2. Actuators in Chemical Engineering:Actuators, on the other hand, are devices that act upon the data provided by sensors. They control specific process variables by adjusting valves, pumps, motors, or dampers. Actuators are vital in maintaining process stability and achieving desired results. For instance, actuators may regulate the flow rates of various substances to maintain a precise ratio in a chemical reaction, optimize heat transfer, or handle the movement of materials during a manufacturing process.3. Applications of Sensors and Actuators in Chemical Engineering:a) Process Optimization: By providing real-time data on various process parameters, sensors enable chemical engineers to optimize reaction conditions. This optimization leads to increased product yield, reduced waste generation, and improved energy efficiency. Actuators then respond to the data provided by sensors to controlvariables and maintain optimal conditions. This iterative process helps achieve the best possible outcome.b) Safety Enhancement: Sensors play a crucial role in ensuring the safety of chemical processes. They monitor parameters such as temperature, pressure, and gas concentrations, allowing timely detection of anomalies and potential hazards. Actuators respond to these inputs by taking corrective actions, such as shutting down equipment or adjusting process parameters to prevent accidents or damage to equipment.c) Quality Control: Sensors aid in quality control by continuously monitoring critical product parameters. For example, pH sensors are used to monitor and adjust the acidity of a solution during a chemical reaction, ensuring the desired product quality. Actuators respond to sensor inputs by adjusting process parameters to maintain consistency and compliance with quality standards.d) Environmental Protection: Sensors and actuators also contribute to environmental protection by monitoring and controlling emissions, waste treatment processes, and resource consumption. For example, gas sensors can detect emissions of harmful gases,triggering appropriate actions to minimize their release. Actuators can also optimize process parameters to minimize environmental impact, such as reducing energy consumption or recycling waste materials.4. Benefits of Sensors and Actuators in Chemical Engineering:a) Enhanced Efficiency: By providing real-time data and enabling precise control of process parameters, sensors and actuators improve overall process efficiency. This improvement translates into increased productivity, reduced energy consumption, and optimized resource utilization.b) Improved Safety: The ability of sensors and actuators to detect anomalies and control critical parameters enhances the safety of chemical processes. They help prevent accidents, equipment failures, and the release of hazardous substances.c) Cost-effectiveness: Utilizing sensors and actuators optimizes process conditions, reduces waste generation, and minimizes resource consumption. These benefits lead to cost savings in terms of raw materials, energy, and waste management.d) Automation and Control: Sensors and actuators facilitate process automation, minimizing the need for manual intervention. This automation results in consistent product quality, reduced human errors, and improved overall process control.Conclusion:Sensors and actuators are invaluable tools in chemical engineering, enabling enhanced process efficiency, safety, and control. Their integration into chemical processes allows engineers to monitor and adjust critical parameters in real-time, optimizing conditions for maximum output and minimal waste. Furthermore, sensors and actuators contribute to environmental protection by controlling emissions and resource consumption. Implementing these technologies in chemical engineering is vital for achieving sustainable and cost-effective operations.。
自动化专业英语
自动化专业英语自动化专业英语是指在自动化工程领域中所使用的英语词汇和表达方式。
自动化专业英语的学习对于自动化专业的学生来说非常重要,因为它能够帮助他们更好地理解和应用自动化技术。
下面将介绍自动化专业英语的相关内容。
一、自动化概述自动化是指利用计算机和控制设备对生产过程进行监控和控制的技术。
它可以提高生产效率、降低成本,并且能够实现生产过程的自动化管理。
自动化技术在各个行业中都得到了广泛的应用,如工业自动化、交通运输自动化、农业自动化等。
二、自动化专业英语词汇1. Automation(自动化): The use of computers and control devices to monitor and control production processes.2. Control system(控制系统): A system that manages and regulates the operation of machines and processes.3. Programmable logic controller (PLC)(可编程逻辑控制器): A digital computer used for automation of electromechanical processes.4. Sensor(传感器): A device that detects and responds to physical input from the environment.5. Actuator(执行器): A device that converts control signals into physical action or movement.6. Feedback(反馈): Information about the output of a system that is used to adjust the system's input or operation.7. HMI (Human-Machine Interface)(人机界面): The interface between humans and machines, typically consisting of a graphical user interface (GUI).8. SCADA (Supervisory Control and Data Acquisition)(监控与数据采集系统):A system for remote monitoring and control of industrial processes.9. Robotics(机器人技术): The design, construction, and use of robots for automation.10. Industrial Internet of Things (IIoT)(工业物联网): The network of physical devices, vehicles, and other objects embedded with sensors, software, and connectivity to enable data exchange and automation in an industrial environment.三、自动化专业英语表达方式1. Introduction to Automation(自动化简介)Automation is the use of computers and control devices to monitor and control production processes. It has revolutionized various industries by improving efficiency, reducing costs, and enabling automated management of production processes. With the advancement of technology, automation has become an integral part of many industries, including manufacturing, transportation, agriculture, and more.2. Control Systems(控制系统)Control systems are essential components of automation. They manage and regulate the operation of machines and processes, ensuring their efficiency and accuracy. Programmable logic controllers (PLCs) are commonly used in control systems. These digital computers are designed to automate electromechanical processes and provide precise control over various industrial operations.3. Sensors and Actuators(传感器和执行器)Sensors play a crucial role in automation by detecting and responding to physical input from the environment. They collect data on temperature, pressure, position, and other variables, which is then used for control and decision-making purposes. Actuators, on the other hand, convert control signals into physical action or movement. They enablemachines and processes to perform specific tasks based on the input received from sensors.4. Feedback and Control Loops(反馈和控制回路)Feedback is an important concept in automation. It refers to the information about the output of a system that is used to adjust the system's input or operation. By continuously monitoring and analyzing feedback data, control systems can make real-time adjustments to ensure optimal performance. This is achieved through control loops, which consist of sensors, controllers, and actuators working together to maintain desired system conditions.5. Human-Machine Interface(人机界面)The human-machine interface (HMI) is the interface between humans and machines. It allows users to interact with automation systems through a graphical user interface (GUI) or other input devices. HMIs provide real-time data visualization, system status monitoring, and control options, enabling operators to effectively manage and control automated processes.6. SCADA Systems(监控与数据采集系统)SCADA (Supervisory Control and Data Acquisition) systems are used for remote monitoring and control of industrial processes. They collect data from various sensors and devices, analyze it, and provide real-time information to operators. SCADA systems play a crucial role in ensuring the efficient and safe operation of automated processes, as they enable operators to monitor and control multiple systems from a centralized location.7. Robotics(机器人技术)Robotics is a branch of automation that focuses on the design, construction, and use of robots. Robots are programmable machines that can perform tasks autonomously or with minimal human intervention. They are widely used in manufacturing, healthcare, agriculture, and other industries to automate repetitive or dangerous tasks, improve efficiency, and enhance overall productivity.8. Industrial Internet of Things(工业物联网)The Industrial Internet of Things (IIoT) refers to the network of physical devices, vehicles, and other objects embedded with sensors, software, and connectivity. IIoT enables data exchange and automation in an industrial environment. By connecting machines, systems, and processes, IIoT facilitates real-time monitoring, predictive maintenance, and improved decision-making, leading to increased efficiency and productivity in industrial operations.以上是关于自动化专业英语的相关内容,包括自动化概述、自动化专业英语词汇和表达方式。
机械工程及自动化 英语
机械工程及自动化英语Mechanical Engineering and Automation: A Dynamic Duo.Introduction.The fields of mechanical engineering and automation are intertwined, forming a synergistic relationship that drives innovation and technological advancements. While mechanical engineering focuses on the design, analysis, and manufacturing of mechanical systems, automation involves the use of control systems to automate tasks traditionally performed by human operators. Together, these disciplines enable the creation of efficient, reliable, and cost-effective systems that enhance productivity and improve quality.Mechanical Engineering.Mechanical engineering encompasses a broad range of subfields, including:Design and Analysis of Machines: This involves the development and evaluation of machines and components, such as engines, turbines, and transmissions.Manufacturing and Materials: This area focuses on the processes and materials used to produce mechanical systems, including casting, forging, and welding.Thermal and Fluids Engineering: This subfield deals with the transfer of heat and fluids in systems, such as power plants, refrigeration units, and pumps.Solid Mechanics: This area of mechanical engineering investigates the behavior of solids under load, including stress analysis, fracture mechanics, and fatigue analysis.Automation.Automation refers to the use of technology to automate tasks that are repetitive, dangerous, or time-consuming. It involves the integration of sensors, actuators, and controlsystems to achieve self-operation. Key concepts in automation include:Sensors and Actuators: Sensors detect physical parameters, while actuators convert electrical signals into physical actions. These components provide the interface between the control system and the physical world.Control Systems: Control systems use algorithms to monitor system performance and regulate inputs to achieve desired outputs. They can range from simple feedback loops to complex hierarchical systems.Programmable Logic Controllers (PLCs): PLCs are specialized computers used in industrial automation. They execute programs that control the operation of machines and devices.Robotic Systems: Robots are automated machinery capable of performing a wide range of tasks, including assembly, welding, and painting.Synergy between Mechanical Engineering and Automation.The combination of mechanical engineering and automation creates powerful synergies that drive innovation and enhance the capabilities of systems. Some key advantages of this integration include:Increased Efficiency and Productivity: Automation reduces human intervention, leading to increased production rates and reduced labor costs.Improved Quality and Reliability: Automated systems can maintain consistent precision and accuracy, reducing defects and improving product quality.Cost Reduction: Automation can save companies money by eliminating the need for human labor, reducing energy consumption, and minimizing waste.Safety Enhancements: Automation can remove humans from hazardous environments, reducing the risk of accidents and injuries.New Product Innovation: Automation enables the development of new products and services that would not be feasible with manual operation.Applications of Mechanical Engineering and Automation.The integration of mechanical engineering and automation finds applications in various industries, including:Manufacturing: Automated assembly lines, robotic welding, and CNC (computer numerical control) machining.Automotive: Engine control systems, self-driving cars, and automated car manufacturing.Aerospace: Flight control systems, aircraft design, and automated manufacturing of aircraft components.Medical: Surgical robots, automated drug delivery systems, and diagnostic imaging equipment.Energy: Power plant automation, renewable energy systems, and smart grids.Conclusion.Mechanical engineering and automation are complementary disciplines that synergistically enhance the capabilities of systems. The integration of these fields enables the creation of efficient, reliable, cost-effective, and innovative solutions that drive technological advancements and improve our lives. As technology continues to evolve, the combination of mechanical engineering and automation will continue to shape the future of industries and bring about transformative changes.。
ESI期刊简介
39 AUTOMATICA Automatica 自动化
40 APPL SPECTROSC Applied spectroscopy 应用光谱学
36 IEEE TRANS IMAGE PROCESSING IEEE transactions on image processing 成像过程——IEEE 协议
37 IEEE TRANS BIOMED ENG IEEE transactions on biomedical engineering 生物化学工程——IEEE 协议
34 MICROELECTRON ENG Microelectronic engineering 微电子工程
35 SPECTROCHIM ACTA PT B-AT SPEC Spectrochimica Acta Part B: Atomic Spectroscopy 吉林大学文献 B 部分——原子光谱学
微电子力学系统学报 57 IEEE TRANS POWER SYST
IEEE transactions on power systems 电力系统——IEEE 协议 58 NEURAL COMPUT Neural computation 神经计算原理 59 PROC COMBUST INST Proceedings of the combustion institute 燃烧学会诉讼 60 IEEE TRANS WIREL COMMUN IEEE transactions on wireless communications 无线通讯——IEEE 协议 61 INT J PLASTICITY International journal of plasticity 国际塑性材料学学报 62 J AIR WASTE MANAGE ASSOC Journal of the air 与 waste management association 空气与废气管理联合会学报 63 LECT NOTE ARTIF INTELL Knowledge-based intelligent information and engineering systems 基于学术的智能信息工程系统 64 SMART MATER STRUCT Smart materials 与 structures 智能材料与结构 65 IEEE TRANS CIRC SYST VIDEO T IEEE transactions on circuits and systems for video technology 动态影像技术的电路系统——IEEE 协议 66 INT J PROD RES International journal of production research 国际产业研究学报 67 J BIOMECH ENG Journal of biomechanical engineering-transactions of the asme 生物力学工程学报——ASME 协议
航空航天类及仪器仪表类的SCI期刊(不包括SCIE)
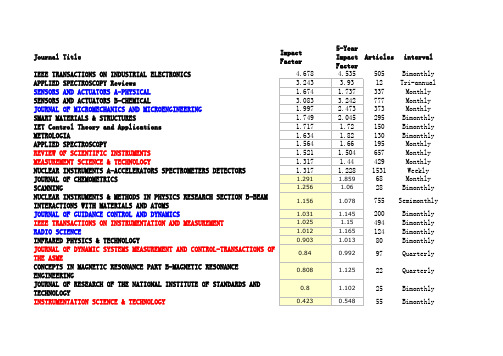
5-Year Impact Factor 4.535 3.93 1.737 3.242 2.473 2.045 1.72 1.82 1.66 1.504 1.44 1.228
Articles
interval
AMERICAN LABORATORY
0.152
0.166
28
Semimonthly
Aerospace SCI
0.127
3.571 1.26 1.757 1.022 0.918 0.81 0.612 0.553 0.626
0.226
20 301 166 68 27 138 29 226 36
Monthly Monthly Quarterly Bimonthly Bimonthly Bimonthly Bimonthly Quarterly Bimonthly Quarterly
Journal Title
Impact Factor
4.678 505 Bimonthly IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS 3.243 12 Tri-annual APPLIED SPECTROSCOPY Reviews 1.674 337 Monthly SENSORS AND ACTUATORS A-PHYSICAL 3.083 777 Monthly SENSORS AND ACTUATORS B-CHEMICAL 1.997 373 Monthly JOURNAL OF MICROMECHANICS AND MICROENGINEERING 1.749 295 Bimonthly SMART MATERIALS & STRUCTURES 1.717 150 Bimonthly IET Control Theory and Applications 1.634 130 Bimonthly METROLOGIA 1.564 195 Monthly APPLIED SPECTROSCOPY 1.521 657 Monthly REVIEW OF SCIENTIFIC INSTRUMENTS 1.317 429 Monthly MEASUREMENT SCIENCE & TECHNOLOGY 1.317 1531 Weekly NUCLEAR INSTRUMENTS A-ACCELERATORS SPECTROMETERS DETECTORS 1.291 1.859 68 Monthly JOURNAL OF CHEMOMETRICS 1.256 1.06 28 Bimonthly SCANNING 1.156 1.078 755 NUCLEAR INSTRUMENTS & METHODS IN PHYSICS RESEARCH SECTION B-BEAM INTERACTIONS WITH MATERIALS AND ATOMSSemimonthly 1.031 1.145 200 Bimonthly JOURNAL OF GUIDANCE CONTROL AND DYNAMICS 1.025 1.15 494 Bimonthly IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT 1.012 1.165 124 Bimonthly RADIO SCIENCE 0.903 1.013 80 Bimonthly INFRARED PHYSICS & TECHNOLOGY 0 0.992 97 Quarterly JOURNAL OF DYNAMIC SYSTEMS MEASUREMENT AND CONTROL-TRANSACTIONS OF THE ASME.84 0.808 1.125 22 Quarterly CONCEPTS IN MAGNETIC RESONANCE PART B-MAGNETIC RESONANCE ENGINEERING 0.8 1.102 25 Bimonthly JOURNAL OF RESEARCH OF THE NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY 0.423 0.548 55 Bimonthly INSTRUMENTATION SCIENCE & TECHNOLOGY 0.4 0.482 9 Bimonthly JOURNAL OF AUTOMATED METHODS & MANAGEMENT IN CHEMISTRY 0.331 0.286 160 Bimonthly INSTRUMENTS AND EXPERIMENTAL TECHNIQUES 0.251 0.238 165 Monthly AUTOMATION AND REMOTE CONTROL 0.16 0.129 209 Monthly MEASUREMENT TECHNIQUES
sensors and actuators b chemical不超过5000字
sensors and actuators b chemical不超过5000字Sensors and Actuators are crucial components in the fieldof chemical engineering. These devices play a significant role in monitoring and controlling various chemical processes and reactions. Sensors are responsible for detecting physical or chemical changes in the environment, while actuators are used to initiate a certain action based on the information received from sensors.传感器和执行器是化学工程领域中不可或缺的部件。
这些设备在监测和控制各种化学过程和反应中起着重要作用。
传感器负责检测环境中的物理或化学变化,而执行器则根据传感器接收到的信息来启动某种动作。
Chemical sensors are specialized sensors that are designedto detect the presence of specific chemicals or gases. These sensors work based on various principles such as electrochemical, optical, or catalytic reactions. They can be used to monitor parameters such as temperature, pressure, pH, concentration of a particular chemical species, andmany more.化学传感器是专门设计用于检测特定化学物质或气体存在的传感器。
描写机器人的外观英语作文
描写机器人的外观英语作文Appearance of a Robot.In the realm of science fiction and technological advancements, robots have captured the imaginations of humans for centuries. As we delve into the creation of these artificial beings, their physical appearance becomes a crucial aspect of their design and functionality.Structure and Materials.The structure of a robot is the foundation upon which its other features are built. Robots can take on a wide range of forms, from humanoid figures to wheeled or tracked vehicles. Each design choice is influenced by the specific purpose of the robot and the intended environment in which it will operate.Many robots are constructed from metal alloys, such as aluminum, steel, or titanium. These materials provide abalance of strength, durability, and weight. Others may incorporate polymers or composite materials for enhanced flexibility or resistance to specific elements.Body Shape and Dimensions.The body shape and dimensions of a robot are determined by the tasks it is designed to perform. Humanoid robots, often used for social interaction or assistance, typically mimic the shape and proportions of the human body. This allows them to interact with humans in a natural and intuitive manner.Other robots may have specialized body shapes optimized for specific tasks. For example, industrial robots used in manufacturing often have elongated arms and joints for increased reach and precision. Underwater robots, on the other hand, often adopt streamlined shapes to reduce drag and facilitate movement through water.Sensory Apparatus.Sensors are vital for robots to perceive their surroundings and interact with the world. These sensors are often integrated into the robot's body or attached to external appendages.Cameras are essential for vision, allowing robots to gather visual information about their environment. Other sensors include microphones for sound detection, infrared sensors for heat detection, and force sensors for detecting physical contact.Actuators and Motors.Actuators and motors provide the mechanical power to move the robot's body and limbs. These components are typically powered by electric motors or hydraulics. The type and configuration of actuators and motors depend on the desired movement capabilities of the robot.For example, humanoid robots require a complex system of actuators and motors to replicate the range of motion of the human body. Industrial robots, on the other hand, mayuse simple actuators for repetitive and precise movements.Additional Features.In addition to the core components mentioned above, robots may also incorporate a variety of additional features depending on their intended use. These features can include:Displays: LED screens or other display technologiesfor communicating information or displaying data.Grippers and Manipulators: Mechanical devices for grasping and manipulating objects.Communication Systems: Wireless or wired communication modules for data transmission and control.Sensors for Environmental Monitoring: Sensors for detecting temperature, humidity, or air quality.Customization and Design.The appearance of robots is not limited to functional considerations. Robots can also be customized with aesthetic features and designs to appeal to different tastes or reflect the brand or purpose of the robot.For example, companion robots designed for personal use may have sleek and stylish designs, while robots used in healthcare settings may have more clinical and utilitarian appearances.Conclusion.The appearance of a robot is a complex and multifaceted aspect of their design. From the choice of materials to the integration of sensors and actuators, every aspect of a robot's body is carefully considered to optimize its functionality and aesthetic appeal. As the development of robotics continues to advance, we can expect to see an increasingly diverse range of robot appearances thatreflect the myriad applications and capabilities of these artificial beings.。
4.液态金属微流体及其应用
微泵大规模集成
• 单排微泵双层结构: • 多排微泵多层集成 :
微传感器:
• 微流式传感器 • 微压力传感器 • 微流道压力传感器
液态金属柔性微传感器
Байду номын сангаас
液态金属微加热器/温度传感器
连续流PCR
片上细胞培养温度控制系统
全液态金属微器械芯片系统
• 纯液态金属组件 • 多组件联合工作 • 高集成性 • 通电即运行!
10 50 1 2.65
220 2000
铂电极 铂丝(0.35毫米直径) 铂电极
铂电极,双流体驱 动,复杂,寿命长 凝胶电极,寿命短 铂电极,
1. Meng G., Lin G.*, Lab on a chip, 2014
2. Kilsung K.,Sensors and Actuators A. 2012 3. Siyong J. Journal of Electrostatics, 2011 4. Ye A. etc. Journal of colloid and Interface Science, 2010 5. Shawn L. etc. Sensors and Actuators A: Physical, 2010 6. Tom G. etc. Lab on a Chip, 2009 7. Shaorong L. etc. Journal of Chromatography A, 2003
特征尺寸(毫米) 0.1
最低驱动电压(伏) 电极制作工艺
0.5
液态金属超细灌注
工艺,微米量级尺寸,
寿命长,制作简单
Kilsung K. 20122 398
Siyong J. 20113 8
Ye A. 20104
MEMS 版杂志投稿
MEMS 版 (精华区)发信人: dtl (意大利,蓝色的梦,远走), 信区: MEMS标题: [合集] 请问关于MEMS的SCI杂志有哪些?发信站: BBS 水木清华站 (Mon Jun 28 22:47:25 2004), 站内☆─────────────────────────────────────☆memsgg (小猪) 于 (Wed Jun 2 23:11:13 2004) 提到:我知道的有Sensors and ActuatorsIEEE sensor JournalJMMJMEMSMicrosystem TechnologySmart materials and structures请各位大虾补充另外请介绍一下各个杂志的影响因子、发表的难易程度以及侧重方向。
兄弟有一篇关于器件集成工艺方面的文章,不知发到哪里好。
☆─────────────────────────────────────☆moran (MOrality & RAtioNality) 于 (Thu Jun 3 09:48:30 2004) 提到:Journal IF2002 点评JMEMS 2.835 MEMS领域最牛的杂志,不过没有电子投稿J. Micromech.Microeng 1.755 MEMS影响范围最广的杂志(或许是),方便投稿Sensors and Actuators B 1.893 好像是化学类的,看得少SMAR T MATER STRUCT 1.439 不了解Microscale Therm. Eng. 1.403 微尺度机理方面的牛杂志,不过每期文章太少Sensors and Actuators A 1.299 器件方面影响力最大的杂志,估计很多人投过Microelectronic Eng. 0.900 不了解,我师兄中过Microelectronics Inter. 0.457 不了解Microsystem Technology 0.341 不了解SENSORS AND MATERIALS 0.029 不了解,不知道为什么这么低的if物理类子学科的最高境界当然是能在物理顶级刊物上发文了,除考古、生物外能在下面的任何一个期刊上发文都是很了不起的事情(物理系的兄弟也除外),以下可以与MEMS相关的期刊Science 28.956Physical Review Letter 7.323Applied Physics Letters 4.207Physical Review E 2.397Journal of Applied Phys 2.128国内的总类期刊也有一些,例如Chinese Science Bulletin. 0.570 虽然比中国科学的影响因子高,但水平未必SCI in China E 0.412 国内比较难投的期刊......【在 memsgg (小猪) 的大作中提到: 】: 标题: 请问关于MEMS的SCI杂志有哪些?: 发信站: BBS 水木清华站 (Wed Jun 2 23:11:13 2004), 站内:: 我知道的有: Sensors and A ctuators: IEEE sensor Journal: JMM: JMEMS: Microsystem Technology: Smart materials and structures: 请各位大虾补充: 另外请介绍一下各个杂志的影响因子、发表的难易程度以及侧重方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Sensors and Actuators A:Physical1.IntroductionAt present several wireless capsule endoscopy systems areavailable on the market(Given Imaging,Olympus EndoCapsule)[1].Although appealing to the patient for comfort reasons,they lack three major properties:adequate image resolution (256×256 pixels),sufficient frame rate(2–7 frames per second (fps)),and the ability to move around in a controlled way through the GI tract.These shortcomings hamper their breakthrough with gastro-enterologists,who still prefer the traditional endoscopes[2].These limitations are a direct consequence of the finite energy supply available in these capsular endoscopes.All of them being battery powered,their lifetime is limited between 6 and 8 h,consuming 25 mW.The tight energy limit does not exist in the case of inductive powering[3,25].Without the energy constraint,a higher resolution sensor and higher frame rates become possible.However,in order to get the mass of image data outside the body to the receiver,a high speed data transmitter is required.2.Requirements2.1.Data rateModerm wired endoscopes are already equipped with High-Definition(HD)CCD cameras, providing up to 30 fps at 1920×1080 pixels per frame[4].This resolution would requirea raw Bayer data rate of 78 MByte/D image sensors are not suitable for use in capsular endoscopes because of their high power consumption compared to their CMOS equivalent.HD resolution in wireless endoscopy,even highly compressed,sounds like a fairy tale,for the simple reason that high data rate and low power is hard to combine.It is a questionable prognosis if the big advantage of patient comfort will surpass the need for HD image resolution.Compared to the presently used 256×256 pixel resolution,a big improvement in image quality can already be obtained by using a 640×480 pixel(VGA)image sensor.For 10 fps,which is a major step ahead of the current 2 fps,a raw Bayer data rate of 3.84 MByte/s is required.Still being too high for low power transmission,appropriate compression algorithms have to be used to reduce the raw data rates to acceptable levels suitable for low power transmission.pressionImage compression basically removes visually redundant information from a picture or video stream,without exaggerated loss of detail or introduction of compression artifacts. The (lossy) compression algorithms are either based on removal of high frequency image content(e.g.JPEG)or on removing redundancy from the image colors[5].A20-fold compression can easily be reached without disturbing artifacts or visual image degradation.This will relax the data rate requirement to a more feasible 1.5 Mbps.The choice of the compression engine is important at system level design:depending on the type of compression more bulky and power consuming RAM is needed.2.3.Carrier frequency and modulationLittle research has been done on the choice of the carrier frequency for through-body wireless near-field transmission.The paper of Johnson and Guy describes the attenuation of electromagnetic(EM)waves through the human body[6].This paper suggests to choose a relatively low(<200 MHz)carrier,as the attenuation increases exponentially with the carrier frequency.The reduced attenuation would lead to less required transmitted power.It is currently not known if the same behavior can be expected for near fields,so it is hard to draw a definitive conclusion on the choice of frequency.The work of Chirwa et al.suggests using a carrier between 450 and 900 MHz for maximum radiation[7].This work is based on finite-difference time-domain(FDTD)simulations on a human body model,and does not include antenna loading effects.The same antenna model was used for all frequencies,which partly accounts for the lower radiation intensities at lower frequencies.This work confirms the rapidly increasing absorption above 500 MHz,both for near-and far-fields,as described by Johnson[6].The experiments of Wang et al.describe the in-vitro characterization of ingestible capsules for 30 MHz and 868 MHz[8].They conclude that the low frequency capsule is less influenced by surrounding tissues,shows less orientation-dependent fading and a higher signal to noise(S/N)ratio for a certain power consumption.The research suggests to use a carrier below 500 MHz,although there must exist a trade off between antenna size and wavelength.For far fields,a higher carrier frequency would require a smaller antenna,so less occupied space inside the capsule.As we are working in,or close to the near-field region(the transmission and reception antenna distance is smaller or equal to the wavelength),it is not sure whether this trade-off is still valid.Near-field simulations and experiments will lead to an optimal choice of the carrier.Governmental(FCC and ERO)regulations will eventually define which frequency band can be used[9,10].Candidates could be ISM(433.05–434.79 MHz)or MICS(402–405 MHz),although the defined bandwidth limits the maximum data rate.Currently the 2 m amateur band(144 MHz)is used for data transmission,as this limits the interference with other important bands.FSK is chosen as modulation type,for its simplicity in modulation and demodulation,and its inherent insensitivity to systemnon-linearities.2.4.AntennasThe space around the transmitter antenna can be divided into two main regions as illustrated in Fig.1:far field and near field.In the far field,electric and magnetic fields propagate outward as an electromagnetic wave and are perpendicular to each other and to the direction of propagation.The angular field distribution does not depend on r,the distance from the antenna.The fields are uniquely related to each other viafree-space impedance and decay as 1/r.An the near field,the field components have different angular and radial dependence(e.g.1/r3).The near-field region includes two sub-regions:radiating,where the angular field distribution is dependent on the distance,and reactive,where the energy is stored but not radiated.For antennas whose size is comparable to wavelength(as used in UHF RFID),the approximate boundary between the far-field and the near-field region is commonly given as r=2*D2/λ,where D is the maximum antenna dimension and λis the wavelength.For electrically small antennas(as used in LF/HF RFID and in this application),the radiating near-field region is small and the boundary between the far-field and the near-field regions is commonly given as r=/2π.When the receiver antenna is located in the near field of the transmitter antenna,the coupling between the antennas affects the impedance of both antennas as well as the field distribution around them.The equivalent antenna performance parameters (gain and impedance)can no longer be specified independently from each other and become position and orientation-dependent [11].In general,to calculate the power received by the receiver in such a situation,one needs to perform a three-dimensional electromagnetic simulation of the near-field problem except when the transmitter is small and does not perturb the field of the receiving antenna.The near field of a transmitter antenna can have several tangential and radial electric and magnetic field components which can all contribute to coupling.Two ultimate cases are magnetic (inductive) coupling and electric (capacitive) coupling.In magnetic RFID systems,both receiver and transmitter antennas are coils,inductively coupled to each other like in a transformer.If the transmitter antenna is small,the coupling coefficient is proportional to[12]:where f is the frequency,N is the number of turns in transmitter coil,S is the cross-section area of the coil,B is magnetic field at the transmitter and?is the coil misalignment loss.The primary coupling mechanism in near-field transmission can be either magnetic(inductive)or electric(capacitive).Depending on the environment,the field distribution can be affected by the presence of various objects.Inductive coupled systems,where most reactive energy is stored in the magnetic field,are mostly affected by objects with high magnetic permeability.The magnetic permeability of biological tissue is practically equal to the magnetic permeability of air.On the other hand,capacitive coupling systems,where most reactive energy is stored in electric field,are affected by objects with high dielectric permittivity and loss.Since the body has high epsilon,it seems that inductive coupling is much more efficient for this kind of applications.3.Design strategy3.1.TransmitterThe first work on endoscopic telemetric capsules dates from 1957,where Mackay used a single transistor Hartley oscillator as transmitter[13].The capsule was used to measure gastric pressures,where a pressure sensitive membrane connected to an iron core modulated the oscillator inductance and thereby the oscillation frequency.The operating frequency of this device was in the 100 kHz range.The transmitter developed in earlier work[14]was redesigned such that the power consumption dropped with 66%while doubling the data rate.The transmitter consists of a single transistor Colpitts oscillator as shown in Fig.2.The circuit is built up as a common collector circuit,with the antenna connected to the collector side.The presented topology operates the transistor with a unique double function:(1)it provides gain to the feedback loop to sustain the oscillation and(2)it provides acascode function at the collector.During the capsule GI tract transit,the parasitic loads seen by the antenna change continuously.The cascode limits the antenna load detuning of the LC tank,which greatly improves frequency stability,and therefore reception.FSK modulation is achieved through modulation of the transistor base current.A change in the base current causes a change in base-emitter voltage,which influences the depletion layer width of the base-emitter junction.In this way the base-emitter capacitance is modulated,controlling the tuning of the LC tank.The maximal data rate of this transmitter is limited by the RC time constant of the R data resistor and the capacitance seen at the base.It is clear that from a frequency higher than 1/(R data*C base),the modulation index decreases,because the injected base current is shorted in the base capacitance.Although the occupied bandwidth decreases,the S/N ratio decreases too,and robust demodulation becomes more difficult at faster modulation rates.From experiments,the limit was found to be at 2 Mbps.As stated earlier in the requirements,it is more beneficial to use inductive near-field coupling for the transmitter–receiver system. For that purpose a coil transmitter antenna was developed,which was tuned to resonance around the transmitter frequency,using a trimmable capacitor.The tuned regime(for maximum power output)was measured using a spectrum analyzer.The antenna was designed as a proof of concept,but not simulated or optimized.For that reason further optimization regarding coupling,coil layout and matching is required in the future,when dedicated antennas will be designed and simulated.3.2.ReceiverThe receiver of[14]was reused,which is based on a SA639 IC application note.It consists of an IF mixing system used in DECT receivers.The FSK modulated carrier is converted back to a serial data stream by mixing the IF carrier with a phase-shifted version of itself.This results in a DC component containing the data and a component at twice the IF frequency,which is attenuated using a low pass filter.A2 m low noise amplifier(LNA)was built and included in the system,to improve the noise figure(NF)of the receiving system.The SA639 receiver has a NF of 11 dB,where the LNA has NF of3 dB with a gain of 20 dB.By including the LNA,the overall NF decreased with 6 dB.A tuned loop was used as receiving antenna,designed as a proof of concept for near-field reception.The received data is resynchronized in a hardware developed data recovery system,written in VHDL and implemented in a Xilinx Spartan XC3S200.When a synchronization pattern for a newimage frame is detected in the data stream,the data is buffered in a FIFO and sent through USB to a PC.On the PC the image data is visualized on the screen.The receiver setup is depicted in Fig.3,showing from left to right the USB interface+data recovery,the FSK demodulation board with the PLL below,and the LNA+loop receiver antenna.4.SimulationsThe transmitter circuit was simulated using ELDO[23],in order to:•optimize the component values to maximize the output power,•optimize the component values for the correct carrier frequency,•check for stable and fast start-up behavior,•check the influence of parasitic(capacitive)load changes on the output,•optimize the frequency deviation depending on the DA TA input.The sweep simulation depicted in Fig.4 shows the output frequency at DC modulation.The typical frequency deviation between DA TA=0 and DA TA=1 is approximately 180 kHz.The simulation results in Fig.5 shows the modulated frequency of the transmitter with the DA TA input toggling at 2 Mbps.The short nanosecond spikes are a result of the frequency measurement algorithm.Note the exponential curves at each data edge.This is the consequence of the base capacitance being(dis)charged through the R data resistor.This RC time constant puts a limit on the maximum achievable data rate.An important advantage of this transmitter topology is the insensitivity of the frequency vs.load capacitance variations(Fig.6).The change in frequency is<0.15%for a change in capacitive load of 20 pF.This is a huge improvement compared to[13],where the output frequency is directly proportional to the output capacitive load.5.MeasurementsThe transmitter–receiver system functionality was initially characterized using the setup as described in[24].This setup showed an unmodulated output power of -18 dBm at 50,for a supply voltage of 1.8 V.The power consumption is 2 mW at a modulation rate of 2 Mbps,being equivalent to 15–20 VGA frames/s,using appropriate compression.This results in a FOM of 1 nJ/bit,which is lower than most state-of-the-art transmitter circuits,see Table 1.Fig.7 depicts the data output of the receiver together with the data from the pseudorandom generator,showing that we are able to transmit and receive a data stream a 2 Mbps.A more qualitative test setup was conceived in the meantime, depicted in Figs.8 and 9.The transmitted data is generated from a Micron MT9V013 VGA image sensor(Fig.8 top board+sensor were provided by V ector partner Neuricam).As 30 VGA frames per second are continuously provided,and maximally 2 Mbps can be handled by the transmitter,only one out of 30 frames is buffered in a DRAM,and then slowly released from the buffer(Fig.8,bottom board).This leads to a data rate of 1.5 Mbps,or about 0.5 VGA fps which is fed to the transmitter.To avoid ground loops,or influence/crosstalk between the transmitter and the data generation board,a galvanic isolation between both is mandatory.A TOSLINK optical transmitter and receiver(TOTX147 and TORX147)were used for this purpose,allowing complete galvanic isolation between the data source and the transmitter.Fig.9 depicts the functional transmitter/receiver setup,together with the GUI showing the received picture.Transmitter and receiver are at a distance of about 20 cm.The big difference between[24] and this setup is the use of real VGA image data,as well as the use of near field instead of far-field antennas.For these tests,the transmitter was battery powered by a 3 V coin cell.The transmitter measures only 0.42 cm2 which easily enablesintegration into an endoscopic capsule.Fig.10 depicts the assembled FSK transmitter.6.ConclusionA simple,high data rate and low power transmitter is designed,fabricated and measured.It enables a 4–5 times higher image resolution(VGA instead of QVGA)and 15–17 fps for inductively powered endoscopic capsules.This development greatly improves the acceptation level by the surgeon,and will help to achieve correct diagnosis for GI tract diseases.Future improvements and measurements consist of improving the Tx-Rx antenna system,full integration with a wireless powering module and quantitative tests of the transmitter module,like Bit Error Rate(BER)vs.distance and BER vs.transmission power.More tests need be done on the functional integration of an inductive powering module and transmitter,especially with regards to harmonics of the inductive power link disturbing the transmitted FSK spectrum.AcknowledgmentsThis work is supported by the European Community,within the 6th Framework Programme, through the V ector project(contract number 0339970).The authors wish to thank the project partners and the funding organization.。