内模控制
内模控制的概念
内模控制的概念
内模控制是一种控制理论和方法,旨在通过对控制系统内部模型进行建模和设计,来实现对系统的高性能控制。
它将系统模型与控制器相结合,以实现对系统输入输出信号的精确跟踪和鲁棒性。
与传统的外模控制不同,内模控制能够通过对系统内部结构和参数进行调整,控制系统的动态特性和稳定性质。
内模控制的核心思想包括两个关键概念:内模和内模控制器。
内模是指可以完全描述系统动态特性的模型,它能够准确地反映系统的输入输出关系。
内模控制器则是根据内模来设计的控制器,它能够根据系统的内部模型对输入信号进行调整,以实现对系统输出的精确控制。
内模控制的优点在于它能够适应各种复杂的现实控制系统,并具有一定的鲁棒性和适应性。
它能够实现对系统多变量输入输出的高性能控制,并具有抗干扰和鲁棒性强的特点。
此外,内模控制还能够利用系统内部的信息和模型来进行在线参数调整和自适应控制。
总的来说,内模控制是一种基于系统内部模型的高级控制方法,它通过对系统的内部结构和参数进行建模和设计,能够实现对复杂系统的高性能控制。
内模控制和Smith预估器
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
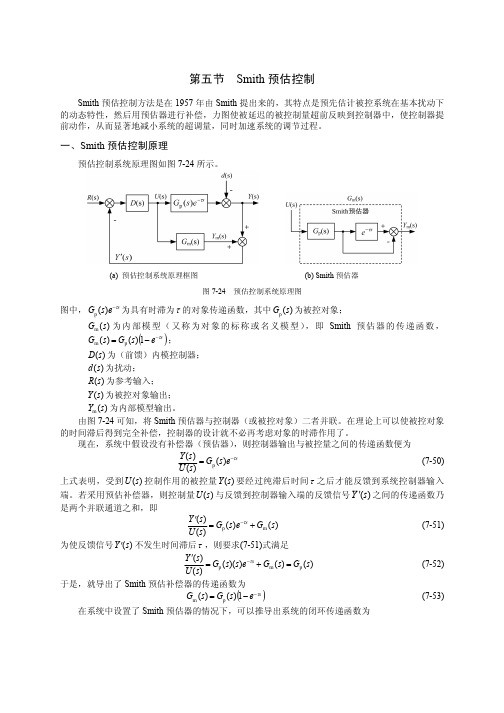
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
6.内模控制

这里 f 为IMC滤波器。选择滤波器的形式,以保证 内模控制器为真分式。
对于阶跃输入信号,可以确定Ⅰ型IMC滤波器的形式
1 f ( s) (Tf s 1)r
对于斜坡输入信号,可以确定Ⅱ型IMC滤波器的形式为
rTf s 1 f ( s) (Tf s 1)r
Tf ——滤波器时间常数。
4.采用理想控制器构成的系统,对模型误差极为敏感,鲁棒性、 稳定性变差。
2. 内模控制器的设计
步骤1 因式分解过程模型
ˆ G ˆ G ˆ G p p pˆ 包含了所有的纯滞后和右半平面的零点,并 式中,G p ˆ 为过程模型的最小相位部分。 规定其静态增益为1。G p
步骤2 设计控制器
GIMC ( s ) 1 ˆ ( s) G p f ( s)
过程无扰动Leabharlann 图6-3过程有扰动
例3-2 考虑实际过程为
R( s)
D( s)
10s 1 5s 1
1 G( s) e 10 s 10s 1
1 10 s 1
e
10 s
Y (s)
1 e 8s 10s 1
内部模型为
ˆ ( s) G 1 e8 s 10s 1
讨论(1)当 K 1 , T 2 , 1 时,滤波时间常数取不同值 时,系统的输出情况。(2)当 K 1 , T 2 ,由于外界干扰 使 由1变为1.3,取 Tf 不同值时,系统的输出情况。
1~4曲线分别为 Tf 取0.1、0.5、1.2、2.5时,系统的输 出曲线。
图6-2
2.若对象含有s平面右半平面( RHP)零点,
ˆ 1 ( s) 中含有RHP极点,控制器本身不稳定,闭 则 GIMC (s) G p 环系统不稳定。
内模控制
然后在反馈和输人通道上增加反馈滤波器
和输人滤波器
,通过调整滤波器的结构和参数,使系统获得所期望的性能。 下面就对开环稳定过程进行离散内模控制器设计。
考虑一般情况,令被控对象为有纯滞后的非最小相位过程,则过
程模型可分解为两部分:
控制器取为: 设计时为保持闭环系统零稳态偏差特性,需满足:
可实现因子可取为:
经输人滤波器
后再送至控制器。
经柔化后的输人参考轨迹的一般形式为:
即
第4章 内模控制 4.6 简化模型预测控制(SMPC) 内模控制是一种极具理论价值的基于模型的控制策略,但其工程实
现因涉及模型求逆和滤波器合理设计等问题,设计过程较为复杂,尤
其是对于多输人多输出过程,实施难度更大。 1987年以后,Arulalan等人提出了一种简化模型预测控制(SMPC),其
对象输入为:
闭环系统输出为:
闭环系统误差为:
其中:
第4章 内模控制
对于模型无差,即 em (s) 的 0特殊情况,上式可简化为:
以上两式表明:对于无模型失配的情形,闭环传递函数
除了
中必须包含所有的滞后和右半
平面零点,且 必须有足够的阶次来避免物理上的不可实
现外,其他都是可以任意选择的。因此,闭环响应可以直接设
第4章 内模控制 4.3.3 设计示例
4.3.3.1 一阶加纯滞后过程
4.3.3.2 高阶过程
情形A.无右半平面(RHP)零点
情形B.具有右半平面(RHP)零点
第4章 内模控制
4.4 内模控制器设计——离散过程
当过程模型采用离散脉冲传递函数形式时,内模控制系统的性质仍
然成立。在离散时间条件下,设计内模控制器也仍然分为两步进行: 首先是设计一个稳定的理想控制器;
内模控制和Smith预估器

第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
内模控制.ppt

内模控制的主要性质
2.理想控制器特性
当模型是准确的,且模型稳定,若设计控制器
使
GIMC
(s)
1 Gp (s)
,且 1 存在并可实现
Gp (s)
则,控制器具有理想控制器特性,即在所有时间 内和任何干扰作用下,系统输出都等于输入设定 值,保证对参考输入的无偏差跟踪。
内模控制的主要性质
3.零稳态偏差特性
Gˆ p Gˆ pGˆ p-
式中,Gˆ p 包含了所有的纯滞后和右半平面的零点,并 规定其静态增益为1。Gˆ p 为过程模型的最小相位部分。
步骤2 设计控制器
1 GIMC(s) Gˆ p (s) f (s)
这里 f 为IMC滤波器。选择滤波器的形式,以保证
内模控制器为真分式。
对于阶跃输入信号,可以确定Ⅰ型IMC滤波器的形式
其反馈信号
Dˆ (s) [Gp(s) Gˆp(s)]U(s) D(s) 0 ——内模控制系统具有开环结构。
内模控制的主要性质
1.对偶稳定性 若模型是准确的,则IMC系统内部稳定的充要
条件是过程与控制器都是稳定的。 所以,IMC系统闭环稳定性只取决于前向通
道的各环节自身的稳定性。 结论:对于开环不稳定系统,在使用IMC之
R(s)
GIMC(s) U(s)
Dˆ (s)
Gp (s)
D(s)
Y (s)
Gˆ p ( s)
Ym (s)
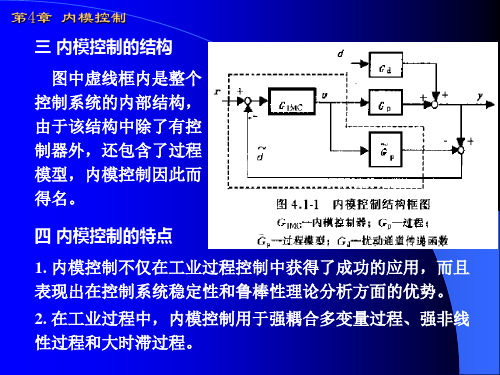
图6-1 内模控制结构框图
Gp (s) ——实际对象; Gˆ p(s) ——对象模型;
R(s) ——给定值;
Y (s) ——系统输出;
内模控制器的设计思路是从 理想控制器出发,然后考虑 了某些实际存在的约束,再 回到实际控制器的。
第4章 内模控制

控制器传递函数为:
模型匹配时
思考:SMPC的缺陷?
第4章 内模控制 4.7 内模控制的工业应用
4.7.2 热交换器温度控制
右图所示是一个蒸汽加热器实 验装置,加热介质为蒸汽,冷流 体为水。控制目标是通过调节加 热蒸汽流量来保证热交换器出口 热水温度平稳。 图中温度控制器采用微机实现。
(一) 对象建模
热交换器出口温度与蒸汽流量 的关系可由开环阶跃响应的实验获得:
第4章 内模控制 (二) 内模控制器设计
(i)对象模型分解: (ii)滤波器设计(即IMC控制器设计):
(三) 算法实现
第4章 内模控制
4.3.2 滤波器设计
f (s) p(s) q(s) 取如下形式:
满足上式的滤波器最简单形式为:
滤波器可以采取其他形式,甚至可获得更快的响应。 例如r=2,滤波器可取为:
第4章 内模控制
4.3.3 设计示例
4.3.3.1 一阶加纯滞后过程
4.3.3.2 高阶过程
情形A.无右半平面(RHP)零点
结构和参数,可以有效地抑制输出振荡,且可获得所期望的动态特性 和鲁棒性。
通常,反馈滤波器可选较为简单的一阶形式:
第4章 内模控制
在反馈通道中插人滤波器,可使原来不稳定的闭环系统镇定下来, 同时还有另外一个作用:就是可抑制干扰的作用。 模型匹配时,由于干扰引起的输出为: 举例:
若已知输出端的干扰为指数上升形式,即
2. 类型2系统 若闭环系统稳定,即使模型与过程失配,即 , 只要控制器满足 ,且 则此系统属于类型2。该系统对于所有斜坡输入和干扰均不存 在稳态误差。
第4章 内模控制 4.2.3 内模控制的实现问题 对于IMC系统,在模型准确情况下,只要令 即可获得理想的设定值跟踪和完全的干扰抑制效果。 然而,理想控制器性质常难以获得,其原因在于: 1. 若对象含有时滞特性; 2. 若对象模型含有右半平面(RHP)零点; 3. 若对象模型严格有理; 4. 采用理想控制器构成的系统,对于模型误差极为敏感,若 模型不准确,则无法确保闭环系统的鲁棒稳定性。 为了解决上述问题,在设计内模控制器时应分为两步进行: 1. 设计一个稳定的理想控制器,而不考虑系统的鲁棒性和约束; 2. 引人滤波器,通过调整滤波器的结构和参数来获得期望的动 态品质和鲁棒性。
6内模控制

R(s)
10s 1 5s 1
D(s)
1
Y (s)
10 s 1
e 10s
1 e8s 10s 1
内部模型为
Gˆ (s) 1 e8s 10s 1
比较IMC和Smith预 估控制两种控制策 略。
R(s)
(a)IMC系统结构
D(s)
101 1 2s
D(s) ——在控制对象输出上叠加的扰动。
讨论两种不同输入情况下,系统的输出情况:
(1)当 R(s) 0, D (s) 0 时:
假若模型准确,即 GˆP(s) Gp(s)
由图可见 Dˆ (s) D (s)
Y (s) D(s)[1 GIMC(s)Gp(s)] D(s)[1 GIMC(s)Gˆp(s)]
(s)
(
p
s
K
1)(0.5
s
1)
Gˆp (s) 0.5 s 1
⑶ 构成理想控制器
Gˆ IMC
(s)
( p s
1)(0.5
K
s
1)
⑷ 加一个滤波器
f
(s)
1 s
这时不需要使
1
GIMC
( s ) 为有
理,因为PID控制器还没有得到,容许 GIMC (s) 的分子比
f
(s)
(Tf
1 s
1)r
对于斜坡输入信号,可以确定Ⅱ型IMC滤波器的形式为
f
(s)
rTf s 1 (Tf s 1)r
Tf ——滤波器时间常数。
r ——整数,选择原则是使 GIMC(s)成为有理传递函数。
内模控制介绍
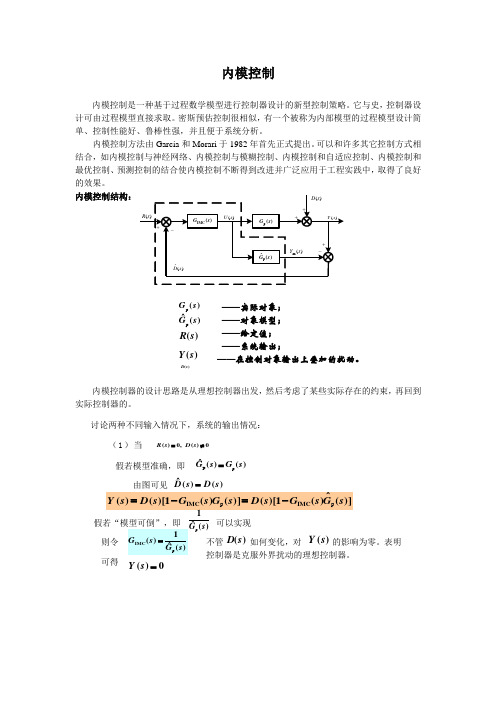
内模控制内模控制是一种基于过程数学模型进行控制器设计的新型控制策略。
它与史,控制器设计可由过程模型直接求取。
密斯预估控制很相似,有一个被称为内部模型的过程模型设计简单、控制性能好、鲁棒性强,并且便于系统分析。
内模控制方法由Garcia 和Morari 于1982年首先正式提出。
可以和许多其它控制方式相结合,如内模控制与神经网络、内模控制与模糊控制、内模控制和自适应控制、内模控制和最优控制、预测控制的结合使内模控制不断得到改进并广泛应用于工程实践中,取得了良好的效果。
内模控制结构:内模控制器的设计思路是从理想控制器出发,然后考虑了某些实际存在的约束,再回到实际控制器的。
讨论两种不同输入情况下,系统的输出情况:(1)当 0)(,0)(≠=s D s R 假若模型准确,即 由图可见)()(ˆs G s G p P =)()(ˆs D s D =)](ˆ)(1)[()]()(1)[()(IM C IM C s G s G s D s G s G s D s Y pp -=-= 可以实现 )(ˆ1s p)(=s Y 可得 不管如何变化,对 的影响为零。
表明控制器是克服外界扰动的理想控制器。
则令 )(s D )(s Y——实际对象; ——对象模型; ——给定值; ——系统输出; ——在控制对象输出上叠加的扰动。
)(s G p )(ˆs G p)(s R )(s Y )(s D(2)当时: 0)(,0)(≠=s R s D )()(ˆs G s G pP =假若模型准确,即 0)(=s D 0)(ˆ=s D表明控制器是 跟踪 变化的理想控制器。
)(s R )(s Y 当模型没有误差)()]()(1[)()()()(IMC IMC s D s G s G s R s G s G s Y p p -+=其反馈信号 0)()()](ˆ)([)(ˆpp =+-=s D s U s G s G s D ——内模控制系统具有开环结构。
基于内模控制原理的PID控制器设计
5、结论
本次演示基于内模控制原理设计了PID控制器,并对其参数设置、性能等进行 了详细分析。通过仿真实验,我们验证了该控制器在工业控制中的应用效果。 结果表明,基于内模控制原理设计的PID控制器具有优异的控制效果、稳定性 和鲁棒性,可为工业控制系统提供更加精确、快速的控制。
未来研究方向可包括进一步优化PID控制器的参数设置方法,研究更加智能的 控制策略,以及拓展PID控制器在其他领域的应用等。结合具体工程应用实例, 对PID控制器进行实践和验证,也是极具意义的研究方向。
参考内容
一、引言
在工业控制系统中,PID(比例-积分-微分)控制器被广泛使用,其对于误差 的及时响应和精确的控制使其在许多领域中表现出色。然而,传统的PID控制 器并不总是能提供最佳的控制效果,尤其是在复杂的、非线性的、时变的系统 中。为了解决这个问题,我们提出了一种基于内模控制的PID控制系统,以提 高控制器的性能和鲁棒性。
(4)仿真验证:利用仿真实验对设计的PID控制器进行验证,以确定其性能和 稳定性。
2、参数设置
Hale Waihona Puke PID控制器的三个主要参数为比例系数、积分时间和微分时间,它们对控制器 的性能有着重要影响。
比例系数用于调节控制器对误差的敏感度,增大比例系数可以使系统更快地响 应误差信号,但过大的比例系数会使系统不稳定。积分时间用于调节控制器对 误差的累积效应,它的作用是消除系统的稳态误差,但过长的积分时间可能导 致系统超调增大。微分时间则用于调节控制器对误差的变化率,它有助于减小 系统的超调量,但过大的微分时间可能导致系统对噪声的敏感度增加。
一、PID控制器原理及应用
PID控制器是一种线性控制器,通过比较设定值与实际输出值之间的误差,利 用比例、积分和微分三个环节对误差进行修正。它的基本原理是:误差信号经 过比例环节后得到比例输出,再经过积分环节得到积分输出,微分环节则给出 微分输出,最后将这三个输出加起来得到最终的控制信号。
内模控制在永磁同步电机中的应用
1现状与展望作者简介:曾成(1993- ),男,硕士研究生,研究方向为永磁同步电机控制; 张维(1992- ),男,硕士研究生,研究方向为永磁同步电机控制。
内模控制在永磁同步电机中的应用曾成,张维(东南大学 电气工程学院,江苏 南京 210096)摘 要:永磁同步电机控制系统是典型的非线性多变量强耦合系统,应用内模控制(IMC)策略能够很好实现电机电流解耦以及速度快速跟踪。
阐述了IMC 的发展及IMC 控制器的设计,介绍了当前永磁同步电机主流控制策略,分析了IMC 在永磁同步电机控制系统中的应用及存在的问题,并提出改进思路。
关键词:永磁同步电机;内模控制;解耦;算法中图分类号:TM341;TM921.5 文献标识码:A 文章编号:1007-3175(2018)06-0001-09Abstract: Permanent magnet synchronous motor (PMSM) control system is a typical nonlinear multivariable strong coupling system. The application of internal model control (IMC) strategy could achieve good motor current decoupling and fast speed tracking. This paper described the development of IMC and the design of IMC controller. Introduction was made to the current mainstream control strategy of PMSM. This paper analyzed the application of IMC in PMSM control system and the problems existing in the application of the internal model control in the permanent magnet synchronous motor control and proposed the improvement ideas. Key words: permanent magnet synchronous motor; internal model control; decoupling; algorithmZENG Cheng, ZHANG Wei(School of Electrical Engineering, Southeast University, Nanjing 210096, China )Application of Internal Model Control in PermanentMagnet Synchronous Motor0 引言永磁同步电机控制系统是一个具有多个耦合状态和参数变化的非线性系统[1]。
内模控制技术讲解

表明控制器是Y (s) 跟踪 R(s) 变化的 理想控制器。
1 Y (s) GIMC(s)Gp (s)R(s) Gˆ p (s) Gp (s)R (s) R(s)
Y (s) GIMC(s)Gp (s)R (s) [1 GIMC(s)Gp (s)]D (s) 当模型没有误差,且没有外界扰动时
其反馈信号
Dˆ (s) [Gp(s) Gˆp(s)]U(s) D(s) 0 ——内模控制系统具有开环结构。
内模控制的主要性质
1.对偶稳定性 若模型是准确的,则IMC系统内部稳定的充要
条件是过程与控制器都是稳定的。 所以,IMC系统闭环稳定性只取决于前向通
道的各环节自身的稳定性。 结论:对来自开环不稳定系统,在使用IMC之
G (s)
Gm (s)
es
Y(s)
带纯滞后特性闭环系统的典型结构图
2.带纯滞后特性闭环系统的近似模型
Gb
(s)
1
Gc (s)G(s)es Gc (s)G(s)Gm (s)es
Gc (s)G(s)es
1 Gc (s)G(s)Gm (s)Pd (s)
R(s) -
Gc(s) Gm (s)
G (s) Pd(s)
前将其稳定。
内模控制的主要性质
2.理想控制器特性
当模型是准确的,且模型稳定,若设计控制器
使
GIMC
(s)
1 Gp (s)
,且 1 存在并可实现
Gp (s)
则,控制器具有理想控制器特性,即在所有时间 内和任何干扰作用下,系统输出都等于输入设定 值,保证对参考输入的无偏差跟踪。
内模控制的主要性质
3.零稳态偏差特性
I型系统(模型存在偏差,闭环系统稳定,只要设
IMC控制
p 1
如果过程包含N个采样周期的纯滞后,则 ˆ ( z ) z ( N 1) G
p
反映采样过程的 固有延迟。
ˆ ( z ) z 1 。 在过程没有纯滞后的情况下,G p
如果过程模型中包含有单位圆外的零点
z Vi 1 Vi ˆ Gp1 ( z ) z V 1 V i i ˆ ( z ) 的零点,而且 式中, V 是 G
(a)IMC系统结构
D( s)
1 101 2s
1 10 s 1
e
10 s
Y (s)
比较IMC和Smith预 估控制两种控制策 略。
1 e 8 s
1 10 s 1
(b)Smith预估控制系统结构 图6-4 存在模型误差时的系统结构图
(b)
(a) (a)不存在模型误差仿真输出
GIMC ( s) Gc ( s ) ˆ ( s) 1 GIMC (s)G p
可以看到控制器 Gc ( s) 的
因为在 s 0 时,
f ( s) 1 ˆ ( s) G ˆ ( s) G p p
得: Gc ( s) | s 0
零频增益为无穷大。因此 可以消除由外界阶跃扰动 引起的余差。这表明尽管 内模控制器 GIMC ( s) 本身 没有积分功能,但由内模 控制的结构保证了整个内 模控制可以消除余差。
f 是可调整参数,当 f 很小,能改善闭环性能,但 对模型误差变得敏感;而当 f 较大时,则相反。
2 模型预测控制技术
模型预测控制算法是以模型为基础,同时 包含有预测的原理;另外,作为一种优化控制 算法,它还具有最优控制的基本特征。 模型预测控制不管其算法形式如何,都具 有以下三个基本特征;即模型预测、滚动优化 和反馈校正。
内模控制器设计
(1) 当对象含有时滞特性时 ,控制器物理上是不可实 现的 ; (2)当对象模型严格有理,而控制器非有理; (3) 当对象模型含有右半平面零点 ,致控制器本身不稳 定,从而使闭环系统也不稳定 ; (4) 由理想控制器构成的控制系统,对于模型误差极为 敏感 ,当模型不匹配时,无法确保闭环稳定性。
第二部分 内模控制器设计
1
1.内模控制原理
内模控制系统结构如图所示
2
内模控制的核心有三部分: 内部模型,用以预测被控对象的输
出并加以较正; 内模控制器,调节控制量使生产过
程的输出跟踪控制系统的给定值; 滤波器,改善控制系统的鲁棒性。
3
内模控制器的设计思路:使 其传递函数为被控对象传递函数
的逆
即: Gc (s) Gm1(s)
8
4.内模控制器的设计步骤
第一步设计一个稳定的理想控制器, 而不考虑系统的鲁棒性和约束;
第二步引入一个滤波器,通过调整 滤波器的结构,使控制其物理可实现, 通过参数调整来获得期望的动态品质和 鲁棒性。
9
步骤1. 过程模型的分解:
Gm (s) Gm (s) *Gm (s)
步骤2 . IMC控制器设计
必须增加 的值以克服它们的影响,而
的增加又提高了系统的鲁棒性。
19
u1 Gc * r
u2
Gc * Gm * u1 1 Gc * Gm
y p Gmu1 Gu1 Gpu2
16
对象稳定,要系统稳定,则要虚线 框环节稳定。根据小增益理论
|| Gc (s)Gm (s) || 1
|| Gc (s)Gm (s)W * (s) || 117Fra bibliotek结论:
(1) IMC系统的本质是一种开环控制系统 ;
内模控制原理

内模控制原理介绍如下:
内模控制是一种先进控制策略,内模控制器的设计是基于被控对象过程数学模型的。
内模控制具有设计结构简单、调节参数方便的特点;特别是增强了控制系统的鲁棒性,并且提高了系统的抗干扰能力。
内模控制方法在工业过程控制中应用广泛,与传统的控制方法相比内模控制方法具有更好的控制效果,具有实际的应用价值。
可以互相转换,但单位负反馈系统与内模控制系统的设计思路存在本质不同。
在单位负反馈系统中,将过程的输出作为反馈,使得外部扰动在反馈量中与其它因素混在一起影响输出,有时得不到及时的补偿。
在内模控制系统中,反馈量变为扰动估计量,在模型与对象不匹配时,扰动估计量包含模型失配的一些信息,使系统的鲁棒性更强,当模型与对象匹配时,系统相当于幵环。
的主要作用是实现对设定值。
的良好跟踪,保证控制系统的跟踪性、鲁棒性和抗干扰性。
线性系统内模控制器设计简单,分为模型完全可逆和模型不堯全可逆两种情况;当模型完全可逆时控制器由模型的逆和合适的滤波器组成;当模型不完全可逆时,模线性系统内模控制器设计简单,分为模型完全可逆和模型不堯全可逆两种情况;当模型完全可逆时控制器由模型的逆和合适的滤波器组成;当模型不完全可逆时,模型可以分解为可逆和不可逆两部分,控制器由可逆部分的逆和合适的滤波器组成。
内模控制
U (s)
Gp(s)
D (s) + Y (s)
+
受控过程
Gm(s)
Ym (s)
+
_
内部模型
IMC闭环传递函数
由基本的内模控制结构图,可得
U (s)
Gc (s)
(R(s) D(s))
1 Gc (s)(Gp (s) Gm (s))
Y (s) D(s)
Gp (s)Gc (s)
(R(s) D(s))
1 Gc (s)(Gp (s) Gm (s))
内模控制系统的性质 1
稳定性
当Gp(s) = Gm(s)时,闭环系统稳定的充 分条件是控制器与过程本身均为稳定。 推 论: (1)IMC不能直接应用于开环不稳定对象; (2)对于开环稳定对象,系统稳定的充分 必要条件为:控制器本身稳定。
内模控制系统的性质 2
逆模控制器
若Gm(s) = Gp(s) = Q(s) /P(s)*e-τs, 而且 Gp(s)为开环稳定;则存在理想控制器
Gc
(s)
P(s) Q (s)
*
Tc s
1
1 nc
其中Q-(s)由Q(s) 中的稳定零点部分组成。 问题:对模型误差过于敏感,即鲁棒性极差.
内模控制系统的性质 3
内模控制 (Internal Model Control)
戴连奎
浙江大学控制科学与工程系 浙江大学智能系统与决策研究所
2000/11/09
内容
引 言 基本内模控制结构 内模控制系统的性质 完全的内模控制系统 仿真举例
基本内模控制结构
R (s) + _
Gc(s) 控制器
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章 基本概念............................................................................................................. 4
2.1、 鲁棒性与鲁棒控制 .......................................................................................... 4
3.2、前馈控制器 Q 的设计 ....................................................................................... 9
3.3、反馈滤波器 F................................................................................................... 10
1.2、发展现状
经过十多年的发展,IMC 方法不仅已扩展到了多变量和非线性系统,还产生了 多种设计方法,较典型的有零极点对消法、预测控制法、针对 PID 控制器设计的 IMC 法、有限拍法等。IMC 与其他控制方法的结合也是很容易的,如自适应 IMC,采用 模糊决策、仿人控制、神经网络的智能型 IMC 等.值得注意的是,目前已经证明,已 成功应用于大量工业过程的各类预测控制算法本质上都属于 IMC 类,在其等效的 IMC 结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅 可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改 进提供了有力的工具。
内模控制器设计 : 摘 要 将内模控制器和传统的 Smith 控制器进行比较对照,总体论述内模控
制器的主要优缺点及其发展前景,然后分别通过预测控制法以及将 Taylor 级数展开,根据内模控制结构原理来设计控制器,并利用 Matlab 语言编程软件对其进行仿真研究。通过各种仿真结果表明,内模控制 与传统的 PID 反馈控制在工程应用中比较,其动态性能更好,稳定性 更强,鲁棒性更突出。通过论证可以得出内模控制设计简单方便,具 有一定的实用性及广阔的发展环境。
4.2、Taylor 级数展开的内模控制器的设计........................................................... 16
第五章
仿真研究................................................................................................... 19
5.1、MATLAB 及其 Simulink 仿真研究 ................................................................ 19
5.2、基于预测控制法的内模控制器设计的仿真研究 .......................................... 20
2
第一章 引 言
1.1 产生背景及研究意义
内模控制(IMC)是 80 年代初提出的,由 Garcia 和 Morari 引进,其产生的背景主 要有两个方面,一是为了对当时提出的两种预测控制算法 MAC 和 DMC 进行系统分 析;其次是作为 Smith 预估器的一种扩展,使设计更为简便,鲁棒及抗扰性大为改 善。
1.3、本文所做工作
本文主要通过对比 Smith 预估器与内模控制器(IMC)来论述内膜控制器制器 (IMC)的工作原理,分别通过预测控制法以及 Taylor 级数展开来设计内膜控制器, 并利用 MATLAN 仿真软件进行实例仿真研究,来说明内模控制器在工程应用中的主 要特点及其广阔的发展前景。
3
第二章 基本概念
1.2、发展现状............................................................................................................ 3
1.3、本文所做工作.................................................................................................... 3
2.1、 鲁棒性与鲁棒控制
当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测 量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系 统的响应。这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才 能更好地纠正系统。
鲁棒控制(Robust Control)方面的研究始于 20 世纪 50 年代。在过去的 20 年中, 鲁棒控制一直是国际自控界的研究热点。所谓“鲁棒性”,是指控制系统在一定(结 构,大小)的参数摄动下,维持某些性能的特性。根据对性能的不同定义,可分为 稳定鲁棒性和性能鲁棒性。以闭环系统的鲁棒性作为目标设计得到的固定控制器称 为鲁棒控制器。
参考文献........................................................................................................................... 28
致谢................................................................................................... 错误!未定义书签。
内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由 控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性 能,后者影响系统的鲁棒性。它是一种实用性很强的控制方法,其主要特点是结构 简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。特别是对于 鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。因此自从其产生以来, 不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比 PID 更为优越的效果。IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰 的影响,一直为控制界所重视。
5.3、Taylor 级数展开的内模控制器的设计的仿真研究....................................... 23
第六章
ቤተ መጻሕፍቲ ባይዱ
结论及展望............................................................................................... 25
6.1 基于预测控制法设计的内模控制器设计结论 .............................................. 25
6.2 Taylor 级数展开的内模控制器的设计结论................................................... 25
第三章 内模控制器控制原理 ....................................................................................... 7
3.1、内模控制器(IMC)与 Smith 预估器 ............................................................. 7
KEYWORDS: Internal model control, Smith predictor, Feed-forward controller,
Feedback filter. Robustness, Taylor series, System simulation, Matlab software.
2.2、PID 控制简介 .................................................................................................... 5
2.3、Smith 预估器 ..................................................................................................... 6
第四章
控制器设计............................................................................................... 13
4.1、基于预测控制法的内模控制器设计 .............................................................. 13
: 关键词 内模控制,Smith 预估器,前馈控制器,反馈滤波器,鲁棒性,Taylor
级数,系统仿真,Matlab 软件
ABSTRACT: Compared the IMC and the Smith controller in this article. It describes
the important character and developing condition of the IMC, and then introduce the design of the controller according to the internal model control mechanism use predictor control and after to spread out the delay segment on first-order Taylor series simulates using Matlab. The result indicates that the dynamic function of internal model control is excellent compared it with PID feedback control. The design of IMC is very simple and practically.