第五章 稳定性
胶体化学第5章 胶体的稳定性

式中,VA为范德华引力势能(为负值);a是球半径;H是两球最短 距离;A是Hamaker常数 。 两平行的等同平板粒子:
VA A 12 D
2
式中,D是两板间距。
上两式表明,VA随距离的增大而下降。 Hamaker常数A是一个重要的参数,它与粒子性质有关,是物质的 特性常数,具有能量的单位,在10-19~10-20J之间。下表是一些物质的 Hamaker常数。
影响絮凝作用的主要因素有: ①絮凝剂的分子结构 絮凝效果好的高分子应有直链结 构,交联和支链结构的效果差。应有水化基团和架桥 功能,电离度越大,荷电越多,分子越伸展,利于架 桥;但若高分子与胶粒荷相同电性时,带电多,产生 静电斥力不利于絮凝。 ②絮凝剂的分子量 分子量越大越好,但过大时,不容 性和远距离则不利絮凝,一般分子量在106左右。 ③絮凝剂的浓度 研究表明存在一个最佳浓度,为胶 粒表面饱和吸附量一般是最好,可见上图示。 ④搅拌 要均匀,不可带激烈。 ⑤酸性和盐 它们对絮凝影响很大。 下面给出了一些代表性的高分子絮凝剂:
4.临界聚沉浓度 电解质是影响V的重要因素之一。见下图示。电解质浓度大(κ亦大), 势垒越低。把势垒值为零时的电解质浓度称为临界聚沉浓度,用Cccc表 示。根据DLVO理论的势能公式,可得到
C ccc 常数
( kT )
3 5
4 0
A z
2
6
这表明,Cccc 与离子价数的六次 方成反比,这与Schulze-Hardy经 验规则相符,也证明了DLVO理 论的合理性。
4.3 高分子的稳定性和絮凝作用
1.空间稳定作用 人们很早就发现高分子物质对溶胶具有稳定作用。稳定机理有如下几 个原因。 ①带电高分子吸附後会增加胶粒间的静电斥力势能。 ②高分子吸附层通常能减小Hamaker常数,从而降低粒子间的范德华 引力势能。 ③带有高分子吸附层的胶粒相互接近时,吸附层的重叠会产生新的斥 力势能阻止粒子聚集。这种稳定作用称为空间稳定作用,产生的斥力势 能称为空间斥力势能,用VS表示。这样粒子间总的相互作用势能为 V = VA + VR + VS
第五章第五节 生态系统的稳定性

恢复力稳定性高的生态系统特征:
① 生物种类较少,物种扩张受到的制约较小。
恢复力强
恢复力弱
恢复力稳定性高的生态系统特征:
②、生物个体小,繁殖快。能以休眠方式渡 过不利时期或产生适应新环境的变异。
6、在草原上人工种草,为了防止鸟把草籽吃掉, 用网把试验区罩上,后来发现,草的叶子几乎被 虫吃光,而没加网罩的草地反而长得较好。造成 这种现象的原因是( C ) A.植被破坏 B.环境污染 C.食物链被破坏 D.缺水干旱 7、生态系统能够保持稳定的原因主要是( A.相对稳定的物质循环 B.缺水干旱 C.自动调节能力 D.食物链被破坏
丁 甲 乙 丙 甲 乙
丙
甲 乙 丁
丙 甲
丁
乙 丁 丙
A
B
C
D
6、某生态学家以“保护和利用草原生态系统”为课题, 对某草原进行了几项专题研究,并绘制了如下两图。其 中:甲图表示一个鼠群迁入一个新的生态系统后的种群 增长曲线;乙图表示单位面积的放牧量与生产者的净生 产量的关系,图中的虚线代表未放牧时,草原中生产者 的净生产量,请据图分析并回答下列问题:
负反馈调节 兔与植物的关系
兔的数量增加 兔吃大量植物 兔因饥饿死亡
兔吃少量植物 植物减少
兔的食物增加
植物增加
结果:抑制或减弱了最初发生的变化,使 生态系统达到或保持稳定。 范围:生物群落内部、 生物群落与无机环境之间
正反馈
生态系统中某一成分 的变化所引起的其它 一系列的变化,反过 来加速最初发生变化 的成分所发生的变化。
恢复力强
恢复力较弱
3、抵抗力稳定性与恢复力稳定性的关系
第五章第五节生态系统的稳定性
生物圈Ⅱ号的启示
人类应保持对自然的敬畏,不 满300万岁的人类想对45亿高龄的 地球指手划脚当家作主,为时尚早 。人类要避免对自然环境的种种自 作聪明,否则,人们很可能不会再 有下一个五千年文明。
第五节生态系统稳定性
少量砍伐森林中的树木,森林的 结构功能不会破坏。
草原上适量放养牲畜,草原不至 于破坏。
பைடு நூலகம்
丙
7、如图是某温带草原生态系统中一个食物网简图。请据图 回答: (1)在生态系统稳定性方面,该生态系统 恢复力稳定性 _____________ 比森林生态系统要强。 捕食、竞争 (3)猫头鹰和蛇的关系属于 _________。该生态系统成分 中未表示的成分有 非生物物质和能量、分解者 。
8.根据下列材料,回答问题: 材料一 红树林是生长在热带、亚热带海岸潮间带 特有的植被,具有丰富的动植物资源。广东是我国红树 林资源最丰富的省份之一,其中雷州半岛和深圳湾的红 树林分布区被列为国家级红树林自然保护区,红树林的 保护和发展也被列为广东建设林业生态省的八大工程之 一。 材料二 2004年12月,印度洋地震引起的海啸导致 死亡十多万人,几百万人无家可归。但因为有茂密的红 树林,印度泰米尔纳德邦一个渔村里的172户人家在这次 海啸中幸免遇难。
课题:设计并制作生态缸,观察其稳定性
阅读后思考:在制作生态缸时,有哪些制作要求?
课题:设计并制作生态缸,观察其稳定性
设计要求 相关分析 小生态瓶中所形成的生态系统, 防止外界生物或非生物因素的 必须是封闭的 干扰 投放的生物,必须具有很强的生 要能够进行物质循环和能量流 活力,成分齐全。 动,以免破坏食物链。 让里面的植物见光,又便于学生 小生态瓶必须是透明的 进行观察。 生态瓶宜小不宜大,瓶中的水 便于操作;缸内储备一定量的 量应为容器的4/5。 空气
线性系统理论(第五章)系统运动的稳定性

的一个状态 。
t [t0,)
如果 xe 不在坐标原点,可以通过非奇异线性变换,使 xe 0,
因此,平衡状态的稳定性问题都可以归结为原点的稳定性问题。
对线性定常系统:x Ax 其平衡状态 Axe 0
A 非奇异,只存在一个位于状态空间原点的平衡状态。
主要内容为: •外部稳定性和内部稳定性 李亚普诺夫意义下稳定性的一些基本概念 •李亚普诺夫第一法 •李亚普诺夫第二法 •性连续系统的稳定性 •线性定常离散系统的稳定性
§5.1 外部稳定性和内部稳定性
一、外部稳定性
外部稳定性:称一个因果系统为外部稳定(BIBO)是指对任何
一个有界输入u(t), ‖u(t)‖≤β1<∞ t [t0, ) 的任意输入u(t),对应的输出y(t)均为有界,即
§5.2 李亚普诺夫意义下运动稳定性的一些基本概念
一、李亚普诺夫第一方法和第二方法 李亚普诺夫第一方法也称李亚普诺夫间接法,属于小范围 稳定性分析方法。是求出线性化以后的常微分方程的解, 从而分析原系统的稳定性。
李亚普诺夫第二方法也称李亚普诺夫直接法,不需要求解 微分方程的解,就能够提供系统稳定性的信息。
x2 x2
fx22
可见,只有在 x2 0 时,d E / dt 0 。在其他各处均有d E / dt 0 ,
这表明系统总能量是衰减的,因此系统是稳定的。
Lyapunov第二法是研究系统平衡状态稳定性的。
二、自治系统、平衡状态和受扰运动
1、自治系统:没有输入作用的一类动态系统
x f (x,t) x(t0) x0 t [t0,)
A 奇异,存在无穷多个平衡状态。
3、受扰运动:动态系统的受扰运动定义为其自治系统由初始 状态扰动 x0 引起的一类动态运动,即系统的状态零输入响 应。
《自动控制原理》第五章:系统稳定性
5.2 稳定的条件
当σi和λi均为负数,即特征根的 σi和λi均为负数, 均为负数 实部为负数,系统是稳定的; 实部为负数,系统是稳定的; 或极点均在左平面。 或极点均在左平面。
5.3 代数稳定性判据
定常线性系统稳定的充要条件 定常线性系统稳定的充要条件是特征方程的根具有负 充要条件是特征方程的根具有负 实部。因此,判别其稳定性,要解系统特征方程的根。为 实部。因此,判别其稳定性,要解系统特征方程的根。 避开对特征方程的直接求解,可讨论特征根的分布, 避开对特征方程的直接求解,可讨论特征根的分布,看其 是否全部具有负实部,并以此来判别系统的稳定性,这样 是否全部具有负实部,并以此来判别系统的稳定性, 也就产生了一系列稳定性判据。 也就产生了一系列稳定性判据。 其中最主要是E.J.Routh(1877 )h和Hurwitz( 其中最主要是E.J.Routh(1877年)h和Hurwitz(1895 E.J.Routh(1877年 年)分别提出的代数判据。 分别提出的代数判据 代数判据。
习题讲解: 习题讲解:
µ
G1
Q21
G1
h2
k1 k1 G1 ( s ) = , G1 ( s ) = (T1s + 1) (T1s + 1) k1k 2 G0 ( s ) = (T1s + 1)(T2 s + 1)
kp
G0 ( s ) G(s) = 1 + G0 ( s ) K p
5.4 Nyquist稳定性判据 Nyquist稳定性判据
系统稳定的条件? 系统稳定的条件?
5.2 稳定的条件
d n y (t ) d ( n −1) y (t ) dy (t ) 线性系统微分方程: 线性系统微分方程: n a + an −1 + L + a1 + a0 y (t ) n ( n −1) dt dt dt d m x(t ) d ( m −1) x(t ) dx(t ) = bm + bm−1 + L + b1 + b0 x(t ) m ( m −1) dt dt dt d n y (t ) d ( n −1) y (t ) dy (t ) + a( n −1) + L + a1 + a0 y (t ) = 0 齐次微分方程: 齐次微分方程: an n ( n −1) dt dt dt an s n + an −1s n −1 + L + a1s + a0 = 0 设系统k 设系统k个实根
第五章劳斯稳定性判据

如果劳斯表中第一列的系数均为正值,则其特征方程 式的根都在S的左半平面,相应的系统是稳定的。
如果劳斯表中第一列系数的符号有变化,其变化的 次数等于该特征方程式的根在S的右半平面上的个数,相应 的系统为不稳定。
C(s)
bmsm bm1sm1 sn an1sn1
b1s b0 a1s a0
xi
s
n1
aj
n2 i (s ii ) i i
1
2 i
j1 s p j i1
s2 2ii s i2
06-7-20
控制系统的稳定性分析
S4
2
12Biblioteka 16明该方程在S右半平面S3
0
0
0
8
24
上没有特征根。令 F(s)=0,求得两对大 小相等、符号相反的
S2
6
16
根 j 2 , j2
S1
8
0
3
,显然这个系统处于临界稳定状态。
06-7-20 S 0
16
控制系统的稳定性分析
23
劳斯判据特殊情况之三 特征方程在虚轴上有重根
如果特征方程在虚轴上仅有单根,则系统的响应是持续 的正弦振荡,此时系统既不是稳定的,也不是不稳定的,因 而称之为临界稳定;如果虚根是重根,则系统响应是不稳定
1.稳定性是控制系统自身的固有性质,这稳定性取决于系 统的固有特征(结构、参数),与系统的输入信号无关;
A:对线性系统,系统是大范围稳定的(与输入偏差无 关);
第五章 控制系统的稳定性分析

控制工程基础
第五章 稳定性分析
3、曲线Ls、Lf的形状对于N、p、z的数值没 有影响,即Lf绕原点的圈数N仅取决于Ls所包 含F(s)的零极点数,而与Ls的形状无关,Ls、 Lf也称为奈奎斯特轨迹。
控制工程基础
第五章 稳定性分析
三、Nyquist稳定判据
1、[s]平面上Ls的选择 [s]平面上L 平面上 正半平面的无穷大半圆 。若在虚轴上有 奇点,则用无穷小半圆绕开。
an−1an−4 − an an−5 A2 = an−1
⋮
A1an−3 − an−1 A2 B1 = A1
A1an−5 − an−1 A3 B2 = A1⋮控 Nhomakorabea工程基础
第五章 稳定性分析
(3)若劳斯计算表中,第一列各元素的符号都 相同,系统是稳定;若第一列各无符号不同, 则系统是不稳定的,其各符号依序改变的次数, 等于正实部特征根的个数。 系统稳定的充要条件: 系统稳定的充要条件: Routh表中第一列各元素的符号均为正且 Routh 表中第一列各元素的符号均为正且 值不零。 值不零。
将系统特性由复域引入频域来分析,即通 过开环 GK ( jw) 的Nyquist图,利用图解法来判 闭环系统的稳定性的,又称作几何判据。
控制工程基础
第五章 稳定性分析
优点:
1、由开环传递函数来求解闭环系统的稳定性, 避开了求解特征方程根的繁锁工作; 2、当系统的传递函数无法用分析法列写时, 可以通过实验来获得这些环节的频率特性曲 线来判断系统的稳定性。 3、奈奎斯特判据不仅能告诉绝对稳定性,还 能告诉系统相对稳定性,以及提高稳定性的 途径;
P1
F(s1)
o
o
Z1
o
σ
σ
【高中生物】必修三第5章第5节生态系统的稳定性
第5章生态系统及其稳定性第5节生态系统的稳定性【学习目标】1.阐明生态系统的自我调节能力2举例说明抵抗力稳定性和恢复力稳定性3.简述提高生态系统稳定性的措施4.设计并制作生态缸,观察其稳定性【学习重难点】1.阐明生态系统的自我调节能力2.抵抗力稳定性和恢复力稳定性的概念【自主学习与点拨】知识点一、生态系统的自我调节能力生态系统的自我调节能力的基础:负反馈调节在生态系统中普遍存在1.生态系统所具有的或自身结构和功能相对稳定的能力,叫做生态系统的稳定性。
2.负反馈调节在生态系统中普遍存在,它是生态系统的基础。
知识点二、抵抗力稳定性和恢复力稳定性3.生态系统的稳定性表现在两个方面:一方面是生态系统并使的能力,叫做抵抗力稳定性;另一方面是生态系统在的能力,叫做恢复力稳定性。
4.一般来说,生态系统中的组分越,食物网越,其自动调节能力就,抵抗力稳定性就。
知识点三、提高生态系统的稳定性5.提高生态系统的稳定性,一方面要,对生态系统的利用应该,不应超过生态系统的自我调节能力;另一方面,对人类利用强度较大的生态系统,应实施相应的投入,保证生态系统内部的协调。
【思考与交流】〖例1〗下列生态系统中自动调节能力最强的是()A. 温带阔叶林 B.热带雨林 C.寒带针叶林 D. 温带草原解析:生态系统具有抵抗力稳定性主要是由于其内部具有一定的自动调节能力,生态系统的自动调节能力有大有小。
一般地说,生态系统的成分越单纯,营养结构越简单,自动调节能力就越小。
题中的四个生态系统中生物成分最复杂的是热带雨林,在热带雨林生态系统中,动植物种类繁多,营养结构非常复杂,假如其中的某种植食性动物大量减少,它在食物网中的位置还可以由这个营养级的多种生物代替,整个生态系统的结构和功能仍然能够维持在相对稳定的状态,其自动调节能力最强。
答案:B。
〖例2〗(2000年上海卷)在某个池塘生态系统中,因污染导致水生植物大量死亡后,池塘中首先减少的物质是()A.CO2 B.O2 C.硝酸盐 D.磷酸盐解析:生态系统发展到一定阶段,都具有一定的自动调节能力。
第五章稳定性理论

第五章稳定性理论稳定性理论5.1 外部稳定性和内部稳定性运动稳定性分为基于I/O 描述的外部稳定性和基于状态空间描述的内部稳定性。
内容包括外部稳定性内部稳定性内部稳定性和外部稳定性关系(1)外部稳定性考虑以I/O 描述的线性因果系统,假定初始条件为零,外部稳定性定义如下:定义5.1 称⼀个因果系统为外部稳定,如果对任意有界输⼊u (t ),对应输出y (t )均有界,即 102(),[,]()u t t t y t ββ?≤<∞∈∞?≤<∞外部稳定也称为BIBO 稳定。
定理5.1 对零初始条件线性时变系统,t 0时刻BIBO 稳定的充分必要条件是 01212(,),,,,;,,,tij t h t d i q j pττβ≤<∞==∫L L证明:先证SISO 情形。
充分性,已知脉冲响应函数绝对可积,证明系统BIBO 稳定。
由基于脉冲响应的输出关系式,有ττβττττττd u d u t h d u t h t y tt tt tt ∫∫∫≤?≤=000)()(),()(),()(因此,对任意有界输⼊u (t ) ∞<≤1β)(t u ∞<≤≤?∫10ββττβd u t y tt )()(即系统BIBO 稳定。
再证必要性,已知系统BIBO 稳定,反设有t 1,使得 ∞=∫ττd t h t t 11),(构造有界输⼊ +==0100011111),(,),(,),(,),(sgn )(ττττt h t h t h t h t u∞===?∫∫τττττd t h d u t h t y tt t t 1010111),()(),()(这与系统BIBO 稳定⽭盾,必要性得证。
MIMO 情形:对输出的每⼀分量,有 pj q i dt t h ij ,,,;,,,,)(L L 21210==∞<≤∫∞β定理5.2 对零初始条件线性时不变系统,BIBO 稳定的充分必要条件是,传递函数矩阵G (s )所有极点均具负实部。
第5章现代控制理论之系统运动的稳定性分析
由稳定性定义知,球域S(δ) 限制着初始状态x0的取值,球域
S(ε)规定了系统自由运动响应 xt xt; x0的, t0边 界。
简单地说:1.如果 x t; x0, t0 有界,则称 xe 稳定;
2.如果 x t; x0, t0 不仅有界,而且当t→∞时收敛于原点,则
5.1.1 平衡状态
李雅普诺夫关于稳定性的研究均针对平衡状态而言。
1. 平衡状态的定义
设系统状态方程为: x f x,t , x Rn
若对所有t ,状态 x 满足 x 0 ,则称该状态x为平衡状
态,记为xe。故有下式成立:f xe ,t 0
由平衡状态在状态空间中所确定的点,称为平衡点。
2.平衡状态的求法
由定义,平衡状态将包含在 f x,t 这样0 一个代数方程组
中。
对于线性定常系统 x A,x其平衡状态为 xe 应满足代数
方程 。Ax 0
只有坐标原点处是线性系统的平衡状态点。
对于非线性系统,方程 方程而定。
如:
x1 x2
x1 x1
x2
x
3 2
f x的,t 解 可0 能有多个,视系统
稳定性是系统的重要特性,是系统正常工作的必要条件。
稳定性是指系统在平衡状态下受到扰动后,系统自由运动 的性质。因此,系统的稳定性是相对于系统的平衡状态而 言的。它描述初始条件下系统方程是否具有收敛性,而不 考虑输入作用。
1. 线性系统的稳定性只取决于系统的结构和参数,与系统 初始条件及外作用无关; 2. 非线性系统的稳定性既取决于系统的结构和参数,也与 系统初始条件及外作用有关;
当稳定性与 t0 的选择无关时,称一致全局渐近稳定。
第五章 系统的稳定性PDF

第五章系统的稳定性讲授内容5.1系统稳定的初步概念一、稳定性的定义系统稳定性是指系统在干扰作用下偏离平衡位置,当干扰撤除后,系统自动回到平衡位置的能力。
若系统在初始状态的影响下,由它所引起的系统的时间响应随着时间的推移,逐渐衰减并趋向于零(即回到平衡位置),则称系统为稳定的;反之,由它所引起的系统的时间响应随着时间的推移而发散(即偏离平衡位置越来越远),则称系统为不稳定的。
线性系统的稳定性是系统的固有特性,仅与系统的结构及参数有关;而非线性系统的稳定性不仅与系统的结构及参数有关,而且还与系统的输入有关。
二、系统稳定的充要条件系统稳定的充要条件是的系统所有特征根的实部全都小于零,或系统传递函数的所有极点均分布在s平面的左半平面内。
若系统传递函数的所有极点中,只有一个位于虚轴上,而其它极点均分布在s平面的左半平面内,则系统临界稳定。
而临界稳定的系统极易因为系统的结构或参数的细微变化而变成不稳定的系统。
因此,临界稳定往往也归结为不稳定的一种。
5.2 (劳斯)稳定判据Routh Routh 判据是判别系统特征根分布的一个代数判据。
一、系统稳定的必要条件要使系统稳定,即系统全部特征根均具有负实部,就必须满足以下两个条件:1)特征方程的各项系数都不等于零。
2)特征方程的各项系数的符号都相同。
此即系统稳定的必要条件。
按习惯,一般取最高阶次项的系数为正,上述两个条件可以归结为一个必要条件,即系统特征方程的各项系数全大于零,且不能为零。
二、系统稳定的充要条件系统稳定的充要条件是表的第一列元素全部大于零,且不能等于零。
Routh 运用判据还可以判定一个不稳定系统所包含的具有正实部的特征根的个数为表第一列元素中符号改变的次数。
Routh Routh 运用判据的关键在于建立表。
建立表的方法请参阅相关的例题或教材。
运用判据判定系统的稳定性,需要知道系统闭环传递函数或系统的特征方程。
Routh Routh Routh Routh 在应用判据还应注意以下两种特殊的情况:Routh 1.如果在表中任意一行的第一个元素为0,而其后各元不全为0,则在计算下一行的第一个元时,该元将趋于无穷大。
第五章稳定性理论

稳定性理论5.1 外部稳定性和内部稳定性运动稳定性分为基于I/O 描述的外部稳定性和基于状态空间描述的内部稳定性。
内容包括 外部稳定性 内部稳定性内部稳定性和外部稳定性关系(1)外部稳定性考虑以I/O 描述的线性因果系统,假定初始条件为零,外部稳定性定义如下:定义5.1 称一个因果系统为外部稳定,如果对任意有界输入u (t ),对应输出y (t )均有界,即 102(),[,]()u t t t y t ββ∀≤<∞∈∞⇒≤<∞外部稳定也称为BIBO 稳定。
定理5.1 对零初始条件线性时变系统,t 0时刻BIBO 稳定的充分必要条件是 01212(,),,,,;,,,tij t h t d i q j pττβ≤<∞==∫L L证明:先证SISO 情形。
充分性,已知脉冲响应函数绝对可积,证明系统BIBO 稳定。
由基于脉冲响应的输出关系式,有ττβττττττd u d u t h d u t h t y tt tt tt ∫∫∫≤⋅≤=000)()(),()(),()(因此,对任意有界输入u (t ) ∞<≤1β)(t u ∞<≤≤⇒∫10ββττβd u t y tt )()(即系统BIBO 稳定。
再证必要性,已知系统BIBO 稳定,反设有t 1,使得 ∞=∫ττd t h t t 11),(构造有界输入 ⎪⎩⎪⎨⎧<−=>+==0100011111),(,),(,),(,),(sgn )(ττττt h t h t h t h t u∞===⇒∫∫τττττd t h d u t h t y tt t t 1010111),()(),()(这与系统BIBO 稳定矛盾,必要性得证。
MIMO 情形:对输出的每一分量,有 pj q i dt t h ij ,,,;,,,,)(L L 21210==∞<≤∫∞β定理5.2 对零初始条件线性时不变系统,BIBO 稳定的充分必要条件是,传递函数矩阵G (s )所有极点均具负实部。
现代机械控制工程 第五章 系统的稳定性

其中,ai>0 (i=0,1,2,…,n),即满足系统稳定的 必要条件。
劳斯稳定判据的判别过程如下:
n列出劳斯阵列 s a0 a2 sn-1 a1 a3 sn-2 b1 b2 sn-3 c1 c2 sn-4 d1 d2 …… s2 e1 e2 s1 f1 s0 g1
a1a2 a0a3 b1 a1 b2
K 0 6 5 K 0
即:当0<K<30时系统稳定。
例2:单位反馈系统的开环传递函数为:
K ( s 1) G( s) s(Ts 1)(5s 1)
求系统稳定时K和T的取值范围。 解:系统闭环特征方程为:
5Ts3 (5 T )s 2 (1 K )s K 0
系统稳定条件为:
T 0 K 0 (5 T )(1 K ) 5TK 0
T 0 5T 0 K 4T 5
劳斯阵列的特殊情况 劳斯阵列表某一行中的第一列元素等于 零,但其余各项不等于零或不全为零。 处理方法:用一个很小的正数 代替该行第 一列的零,并据此计算出阵列中的其余 各项。然后令 0,按前述方法进行判别。 如果零( )上下两项的符号相同,则系统存在 一对虚根,处于临界稳定状态;如果零 ( )上 下两项的符号不同,则表明有一 个符号变化,系统不稳定。
e t (a1 a2t ar t r 1)
当- < 0时,该输出分量指数单调衰减。 当- > 0时,该输出分量指数单调递增。 当- = 0时,该输出分量多项式递增。 对于一对r重复根-+j,相应的时域分量为:
e t (b1 b2t br t r 1 ) cos t (c1 c2t cr t r 1 ) sin t e t
第五章稳定性分析
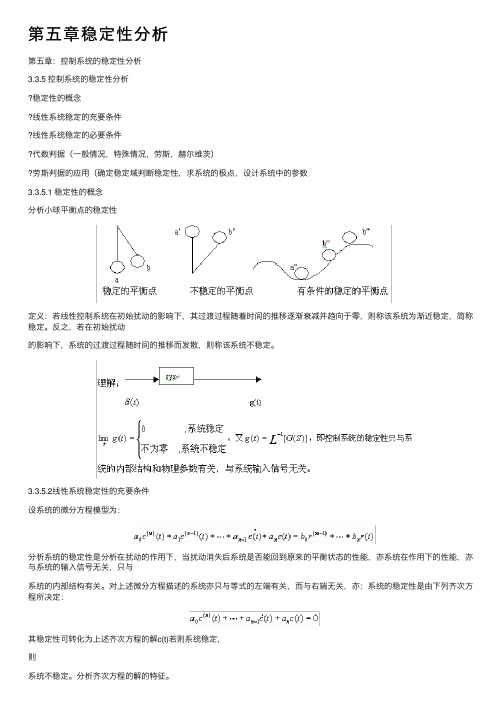
第五章稳定性分析第五章:控制系统的稳定性分析3.3.5 控制系统的稳定性分析稳定性的概念线性系统稳定的充要条件线性系统稳定的必要条件代数判据(⼀般情况,特殊情况,劳斯,赫尔维茨)劳斯判据的应⽤(确定稳定域判断稳定性,求系统的极点,设计系统中的参数3.3.5.1 稳定性的概念分析⼩球平衡点的稳定性定义:若线性控制系统在初始扰动的影响下,其过渡过程随着时间的推移逐渐衰减并趋向于零,则称该系统为渐近稳定,简称稳定。
反之,若在初始扰动的影响下,系统的过渡过程随时间的推移⽽发散,则称该系统不稳定。
3.3.5.2线性系统稳定性的充要条件设系统的微分⽅程模型为:分析系统的稳定性是分析在扰动的作⽤下,当扰动消失后系统是否能回到原来的平衡状态的性能,亦系统在作⽤下的性能,亦与系统的输⼊信号⽆关,只与系统的内部结构有关。
对上述微分⽅程描述的系统亦只与等式的左端有关,⽽与右端⽆关,亦:系统的稳定性是由下列齐次⽅程所决定:其稳定性可转化为上述齐次⽅程的解c(t)若则系统稳定,则系统不稳定。
分析齐次⽅程的解的特征。
由微分⽅程解的知识,上述⽅程对应的特征多项式为:设该⽅程有k个实根(i=1,2,…k)r对复根(i=1,2,…r)k+2r=n 且各根互异(具有相同的根时分析⽅法相同,推导稍繁琐)则上述齐次⽅程的⼀般解为:其中为常数,由式中的决定,分析可见:只有当时,否则。
注:只能是⼩于零,等于或⼤于均不⾏。
等于零的情况为临界稳定,属不稳定。
综:线性系统稳定的充要条件(iff)是:其特征⽅程式的所有根均为负实数或具有负的实部。
亦:特征⽅程的根均在根平⾯(复平⾯、s平⾯)的左半部。
亦:系统的极点位于根平⾯(复平⾯、s平⾯)的左半部。
从上⾯的充要条件可以看出:系统稳定性的判断只需计算上系统的极点,看其在s平⾯上的位置,勿需去计算齐次⽅程的解(当系统复杂时的计算可能很繁),勿需去计算系统的脉冲响应。
3.3.5.3 线性系统稳定的必要条件设系统特征⽅程式中所有系数均为实数,并设(若,对特征⽅程两端乘(-1)),可以证明上述特征⽅程中所有系数均⼤于零(即)是该特征⽅程所有根在s平⾯的左半平⾯的必要条件。
第五章 药物制剂的稳定性

第三节 制剂中药物化学降解的途径
2.酰胺类药物的水解 青霉素类、头孢菌素类 结构中存在不稳定的 β—内酰胺四元环,在H+或OH-影响下,很易裂 环失效。因四元环张力大,β—内酰胺环与抗菌活 性有很大的直接关系。 如氨苄西林在中性和酸性中水解为α-氨苄青霉 酰胺酸,碱性下酰胺键断裂。 最稳定pH为5.8 pH 6.6, t1/2=39天 故本品只宜制成固体剂型、粉末安瓶制剂。
第第五五章章 药药物物制制剂剂的的稳稳定定性性
第 一节 概述
药剂学的宗旨是制备安全、有效、稳定、使 用方便的药物制剂制剂。药物制剂稳定性是保证 安全有效的前提。制剂稳定性研究主要是指体外 稳定性情况。
药物制剂稳定性包括: 1.化学稳定性:药物的化学变化,如水解、 氧化、光解等降解反应,含量下降,色泽变化。 2.物理稳定性:如固体药物颗粒结块、结晶 生长、晶型变化;混悬剂沉降、粒度变化;乳剂 分层。 3.生物学稳定性:因微生物污染,药物腐败 变质。
3.空气(氧)的影响 抗氧剂:①本身为强还原剂,首先被氧化而消耗 氧,保护主药免遭氧化,抗氧剂逐渐被消耗。
②为链反应阻化剂,能与游离基结合,中断 链反应,抗氧剂不被消耗。 分类:水溶性抗氧剂和油溶性(阻化)抗氧剂
焦亚硫酸钠、亚硫酸氢钠用于弱酸性药液, 亚硫酸钠用于偏碱性药液,硫代硫酸钠碱性药液。
协同剂:枸橼酸、酒石酸等。 VE、卵磷脂为天然抗氧剂。
第五章 药物制剂的稳定性
第二节 药物稳定性的化学动力学基础
药物降解可按零级、一级、伪一级反应处理:
1.零级反应:- dC /d t = K C=C0 – k0t 反应速度与反应物浓度无关,而受其它因素影响 2.一级反应: -dC /d t = KC lgC= -kt/2.303 +lgC0 反应速度与反应物浓度一次方成正比
第五章溶液中稳定性

12 10
dien: NH2 NH NH2
8
6
4
2 0
5
10
15
20
en NH2 NH2
Mn2+ Fe2+Co2+Ni2+ Cu2+Zn2+
问题: 变化规律
结论:成环作用使配合物稳定性增加, 且随着环的 数目增加稳定性增加。
(2)环的大小对配合物稳定性的影响 问题:
环的大小对配合物稳定性有何影响 结论:
t2g
由于: (水)很小, Dq(h)可忽略。
因此:
稳定化能对配离子能量的贡献为:
[4n1(t2g)-6n2(eg)] Dq(c)
金属离子:
Mn2+ Fe2+ Co2+ Ni2+ Cu2+ Zn2+
稳定化能(Dq): 0 -4 -8 -12 -6 0
问题:
为何Cu2+ 的配合物稳定性出现异常情况
2.软硬酸碱(Hard and soft acid and base)与配合物的稳定性
配体 乙二胺
lgk1(25 0C, I=0.1) 10.55
1,2-二氨基丙烷
10.65
1,3-二氨基丙烷
9.98
1,2,3-三氨基丙烷
11.1
1. 试判断下列配离子的几何结构 [SbCl5]2-
解:Sb3+价电子层构型: 4d105s25p5d
sp3d2杂化
.. .. .. .. .. Cl Cl Cl Cl Cl
硬酸 软酸
软碱 形成不稳定的配合物
硬碱
交界酸(碱)
软(硬)酸(碱)
形成的配合物稳 定性差别不大
第5章系统的稳定性

经典控制论中,系统稳定性判据
代数判据
Routh(劳斯)判据 Hurwitz(古尔维茨)判据 Nyquist判据 Bode判据
几何判据
5.2 Routh(劳斯)稳定判据
Routh稳定判据
不求解特征方程的根,直接根据特征方程的系 数,判断系统的稳定性,回避了求解高次方程根 的困难。
【例】D(s) s 4 3s3 4s 2 12s 16
【解】:Routh表为: s4 s3 s2 s1 s0 1 3 4 16 12
12 48 48
0( ) 16 12 48 0
很小时,
12
0
16
【结论】:系统不稳定,并有两个正实部根。
【情况2】:
n n n an1 an2 an3 si, si s j, an an an i 1 i j i j k i 1, j 2
(1)
n
s
i 1
n
i
si s j sk,
i 1, j 2, k 3
n a0 n , (1) si an i 1
系统稳定的必要条件:特征方程中所有项的系数均大 于0,只要有一项等于或小于0,则为不稳定系统。 充分必要条件:Routh表第一列元素均大于0。
必要条件证明
D(s) an s n an1s n1 an1 n1 得:s s an 再展开,得
n
a1s a0 0,两端同除以an,并分解因式, (s sn )
其中N+为:正穿越与半次正穿越次数的和。 其中N-为:负穿越与半次负穿越次数的和。
第五章 稳定性理论
为向量的2范数或欧几里德范数 15
且
x(t, x0 , t0 ) xe
t t0
球域S()
则称xe 是李氏意义下的稳定。
当与t0无关时,称为一致稳定
2.渐近稳定
1)是李氏意义下的稳定
2) lim t
x(t,
x0 , t0 )
xe
0
当与t0无关时,称为一致渐近稳定
球域S()被称为平衡状态xe=0的吸引域。
第五章 稳定性理论
1
5.1 外部稳定性和内部稳定性
1、外部稳定性(又称有界输入有界输出稳定性) 定义:对于零初始条件的因果系统,如果存在一个固定的有限常
数k及一个标量使得对于任意的 t [t0 , )
当系统的输入u(t)满足
u(t) k , t [t0 , )
所产生的输出y(t)一定满足
y(t) k , t [t0, )
4.不稳定性
对于某个和任意个,不管有多小、有多
大,只要由S() 内的x0 出发的轨迹超出S()
以外,则xe不稳定
17
(a)稳定平衡状态及一条典型轨迹 (b)渐近稳定平衡状态及一条典型轨迹 (c)不稳定平衡状态及一条典型轨迹
在经典控制理论稳定的概念与李亚普诺夫意义下稳定不完全一
致。
经典控制理论 (线性定常系统)
V (0) 0
V (x) 0(x 0) V (0) 0(x 0)
V(x)正定 V (x) x12 x22 V(x)负定 V (x) 2(x12 3x22 )
V (x) 0(x 0),V (0) 0 V (x) 0(x 0),V (0) 0
正半定 V (x) (x1 x2 )2 负半定 V (x) (2x1 x2 )2
自动控制理论 自考 习题解答第5章稳定性分析

第五章 稳定性分析5—1 解:(1) 系统的特征方程为020)1(212=++⇒=++s s s s 。
因为二阶特征方程的所有项系数大于零,满足二阶系统的稳定的充分必要条件,即两个特征根均在S 平面的左半面,所以此系统稳定。
(2) 系统的特征方程为030)1(312=+-⇒=-+s s s s 。
因为二阶特征方程的项系数出现异号,不满足二阶系统的稳定的充分必要条件,所以此系统不稳定。
(注:BIBO 稳定意旨控制系统的输入输出(外部)稳定,系统稳定的充分必要条件是输出与输入之间传递函数的极点均在S 平面的左半平面。
若传递函数无零极点对消现象时,内部稳定与外部稳定等价。
此系统只含极点不含零点,所以传递函数的极点和特征方程的特征根等价,故直接可以用特征根的位置判系统的稳定性。
) 5—2 解: (1)Θ特征方程中所有项系数大于零,满足稳定的必要条件;又Θ三阶系统的系数内项乘积大于外项乘积(5011020⨯>⨯),满足稳定的充分条件。
∴ 该控制系统稳定。
(2)Θ特征方程中所有项系数大于零,满足稳定的必要条件;Θ特征方程中所有项系数大于零,满足稳定的必要条件;列写Routh故系统有两个特征根在S平面的右半部。
(3)Θ特征方程中所有项系数大于零,满足稳定的必要条件;又Θ三阶系统的系数内项乘积小于外项乘积(30020⨯⨯),不满足<81稳定的充分条件。
∴该控制系统不稳定。
(4)Θ特征方程中所有项系数大于零,满足稳定的必要条件;稳定。
由于第一列元素符号变化两次,系统特征根有两个在右半平面,其它4个根在左半平面。
(5)Θ特征方程中所有项系数大于零,满足稳定的必要条件;不稳定。
由于表中出现全为0的行,为确定特征根的分布可构造辅助方程012048402324,43324=+⇒=+⇒=++=s s s s s s k利用辅助方程的导数方程的对应项系数代替全零行元素,继续完成表的列写。
结果:第一列元素无负数,右半平面无根,有4个根在虚轴上。
第5章系统的稳定性
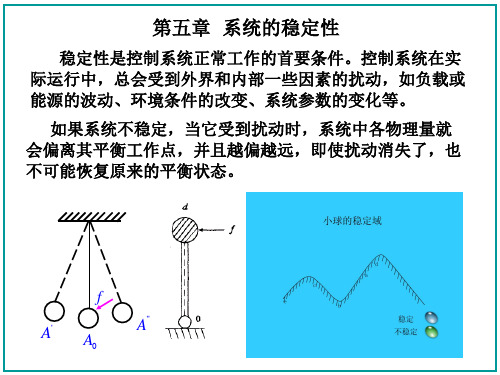
稳定性是控制系统正常工作的首要条件。 稳定性是控制系统正常工作的首要条件。控制系统在实 际运行中,总会受到外界和内部一些因素的扰动, 际运行中,总会受到外界和内部一些因素的扰动,如负载或 能源的波动、环境条件的改变、系统参数的变化等。 能源的波动、环境条件的改变、系统参数的变化等。 如果系统不稳定,当它受到扰动时, 如果系统不稳定,当它受到扰动时,系统中各物理量就 会偏离其平衡工作点,并且越偏越远,即使扰动消失了,也 会偏离其平衡工作点,并且越偏越远,即使扰动消失了, 不可能恢复原来的平衡状态。 不可能恢复原来的平衡状态。
例
系统特征方程 D( s ) = s 6 + 2s 5 + 8s 4 + 12s 3 + 20s 2 + 16s + 16 = 0, 试用劳斯判据判别系统的稳定性。 试用劳斯判据判别系统的稳定性。
解: (1)特征方程的所有系数均为正实数,满足系统稳定 )特征方程的所有系数均为正实数, 的必要条件。 的必要条件。 (2)列劳斯数列表 )
得系统的脉冲响应函数
A C(s) = φ(s) = ∑ i i=1 s − si
n sit i=1
n
g(t) = c(t) = ∑Ae i
若系统稳定
n sit t →∞ t →∞ i=1
lim g(t) = lim∑Ae = 0 i
si (2)若 (2)若 s 为复数 i
(1)若 (1)若 为实数
t →∞
例
已知系统特征方程 D( s ) = s 5 + 3s 4 + 3s 3 + 9s 2 − 4s − 12 = 0 , 试用劳斯判据判别系统的稳定性。 试用劳斯判据判别系统的稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
补上补充习题奈氏判据的内容。
§5.4 稳定性裕量
一、相位裕量和幅值裕量 是系统稳定程度的度量。
Nyquist图上,曲线与单位圆相交时的频率ωc称为幅值交界频率。 Bode 图上,对数幅频特性曲线与0dB线相交时的频率ωc称为幅值穿越频率。 (开环截止频率、开环剪切频率)。
图5-16 a)正的相位裕量和幅值裕量
解:P=1 N(+) =1, N(-) =1/2
N(+) - N(-) =1 - 1/2 = 1/2 = P/2
此非最小相位系统稳定。
例2: 如图是3个系统开环传递函数的相应Bode图,试判断闭环系统稳定性并 讨论K值变化时对系统稳定性的影响。
解:(a) P=0 ,γ=1, N(+ ) = N(-) = 0 ,N(+ ) - N(-) =P/2,闭环系统稳定。
例:当K=10和K=100时,求系统的相位、 幅值裕量。
解:
当K=10时, γ=21 Kg=8dB 当K=100时, γ=-21 Kg=-12dB
三、相位裕量与时间响应的关系 为得满意性能,相位裕量应在30°~60°之间,相当于 ξ=0.28~0.6。 根据相位裕量,与根据ξ一样分析系统的振荡特性。
若 P =2
则系统稳定
三、对数频率特性的奈氏判据(Bode判据)
对应关系: Nyquist 判据 (-1, j0 )点
对(-1, j0)点以左的穿越
Bode判据 A(ω) = 1 [即L(ω) = 0] φ(ω) =-180° A(ω) > 1 [即L(ω) > 0 ] φ(ω)对-180°线的穿越
最小相位系统稳定时应有 γ>0
2. 幅值裕量 在相位交界频率处开环频率特性幅值的倒数。
K
1
g | G( j)H ( j) |
K g (dB)
20lg Kg
20lg | G(
1
jg )H (
jg ) |
20lg | G( jg )H ( jg ) |
最小相位系统稳定时应有 Kg>0
二、关于幅值裕量和相位裕量的一些说明 1. 两个裕量均可作为设计准则; 2. γ =30°~60°,Kg >6dB; 3. 最小相位系统稳定时,应有γ>0 及 Kg>0; 4. 对于最小相位系统,开环幅频和相频特性之间有确定的 对应关系。
K
S1 (0.35-0.025K)/0.35
S0
K
要使系统稳定,必须ai>0,且劳斯表中第一列数都大于零,即 K>0, (0.35-0.025K)/0.35 >0
得
0<K<14
§ 5.3 奈奎斯特稳定判据
一、奈奎斯特稳定判据
由幅角定理可以证明 Z=P-N
其中, Z——闭环右极点数; P——开环右极点数; N ——ω从- ∞ →+ ∞变化时,G(jω)H(jω)封闭曲线在 [GH]平面内包
第五章 系统的稳定性
§5.1 系统稳定的条件
一、稳定的概念及定义 稳定性是指系统在使它偏离稳定平衡状态的扰动消除之后, 系统能够以足够的精度恢复到原来的状态。 稳定性是系统的一种固有属性,取决于系统的结构参数, 与初始条件及外作用无关。
二、系统稳定的充要条件
系统传递函数的极点全部位于[S]复平面的左半部,或系统特征方程根 必须全部具有负实部。
s(Ts 1)
判断系统稳定性。
解:N= - 1/2 , P = 1,Z = P - 2N = 1 - 2×(- 1/2)= 2≠0, 系统不稳定。
见图5-10。
例3:Ⅱ型系统开环传递函数 G(s)H (s) 10 , s2 (0.15s 1)
判断系统稳定性。
解:N=-1,P=0系统不稳定。 系统串接一个一阶微分环节 G(s)H (s) 10(2.5s 1) s2 (0.15s 1) 变稳定。
K较大时,N=-1,P=0,系统不稳定。
结论:开环增益K的增大不利于系统稳定性。
二、奈奎斯特稳定判据的特殊情况
(1)开环传递函数中包含γ个积分环节(即有零极点) 作辅助线: 以无穷大为半径,从Nyquist曲线的起始端逆时针绕过γ×90° 作圆与实轴相交,找到ω=0时曲线G(jω)H(jω)的起点。
若有部分闭环极点位于 ① 虚轴上,系统等幅振荡,属于临界稳定状态, ② [S]复平面的右半部,是一种发散状况,属于不稳定状态。
§ 5.2 劳斯稳定性判据
系统特征方程
ansn + an-1sn-1+….+ a1s + a0=0
① 各项系数 ai>0;
② 列劳斯表
Sn Sn-1 Sn-2 Sn-3
…...
Nyquist图上,曲线与负实轴相交时的频率ωg 称为相位交界频率。 Bode 图上,对数相频特性曲线穿越-180°线时的频率ωg 称为相位穿越频率。
图5-16 b)负的相位裕量和幅值裕量
1. 相位裕量
在幅值交界频率ωc上,使系统达到不稳定边缘所需要附加
的相角滞后量(或超前量)。 γ=φ(ωc )- ( -180°) = 1大
正穿越:由下→上 对应相角增大
Bode判据:
在开环Bode图上,当ω从0 →+ ∞变化时,若L(ω) >0 dB的所有频段内, φ(ω)曲线在-180° 线上正负穿越次数之差等于P/2,则系统稳定。
若恰在L(ω)=0dB处, φ(ω)曲线穿过-180 °线,系统临界稳定。
an an-2 an-1 an-3 b1 b2 c1 c2
an-4 …… an-5 …… b3…… c3……
其中,b1 = ( an-1an-2-anan-3 ) / an-1 b2 = ( an-1an-4-anan-5 ) / an-1 c1 = ( b1an-3-b2an-1 ) / b1 c2 = ( b1an-5-b3an-1 ) / b1
(b) P=0 ,γ=2, N(+ ) - N(-) = 0-1 ≠ P/2,闭环系统不稳定。 (c) P=1 ,γ=1, N(+ ) - N(-) = 1 – 1/2 = P/2,在此时K值下闭环系统稳定。
若K值增大, L(ω)曲线平行上移,闭环系统仍稳定; 若K值减小, L(ω)曲线平行下移,闭环系统可能不稳定。
N :ω从0 →+ ∞变化时,曲线对(-1, j0 )点的包围 次数。
应用举例:
例1:单位负反馈系统的开环传递函数为
G(s)
K 0.1s 1
,用奈氏判
据 判断K=4和K=-4时系统稳定性。
解:K=4时,N = 0,且P = 0,系统稳定。
K=-4时,N = -1/2,且P = 0,系统不稳定。
例2:判断由一个振荡环节
1/2 ——曲线始于或止于(-1, j0 )点以左的实轴上。
奈奎斯特稳定判据改为:
当ω从0 →+ ∞变化时,若开环Nyquist曲线在(-1, j0 )点以左实轴 上的正穿越次数减去负穿越次数等于P/2,则闭环系统稳定,否则不稳定。
N(+ ) - N(-) = P / 2
如: N(+ )=2
N(-) =1
解: ① a4=1 a3 =3 a2 =1 a1=3 a0=1 ,ai>0 ② 列劳斯表
S4
1
S3
3
11 3
S 2 ε(0) 1 (可用一个很小的正数ε代替0)
S1 3-(3/ε)
S0
1
③ ε>0, 3-(3/ε) < 0,系统不稳定,且存在2个右极点。
例: 系统结构图如图,试求系统稳定时K的取值范围。
例1:一单位反馈系统
G(s)
s2 (T1s
k(T4s 1) 1)(T2s 1)(T3s
1)
在某一K值下开
环Nyquist曲线如图,试分析系统闭环稳定性。
解: γ=2,逆时针作2×90°辅助线。
由系统开环传递函数知 P=0。
由图知 N=0。
故 P = 2N ,闭环系统稳定 。
例2:设某非最小相位系统传递函数的开环传递函数 G(s)H (s) K
则判据改为 Z = P - 2 N N :ω从0 →+ ∞变化时,曲线对(-1, j0 )点的包围次数。
奈奎斯特稳定判据: 当ω从0 →+ ∞变化时, 开环频率特性曲线G(jω)H(jω) 逆时针包围[GH]平面内 ( -1, j0)点的次数N如果等于开环 右极点数P的一半,则闭环系统是稳定的,否则闭环系统 不稳定。 Z = P-2N即为闭环右极点数。
Bode判据的特殊情况:
若开环传递函数中有γ个积分环节。 辅助线:在φ(ω)曲线最左端由下至上补作γ·90°的虚线段, 找到相当于 ω=0时φ(ω)曲线的起点。
φ(ω)起于或止于-180°,算半次穿越,也有正负之分。
例1:用波德判据判断具有下列传递函数的 非最小相位系统的稳定性。
G(s)H (s) 10(s 3) s(s 1)
(2)开环奈氏曲线形状复杂 “穿越”:开环Nyquist曲线穿过(-1, j0 )点以左的实轴部分。 正穿越:曲线由上→下穿过(-1, j0 )点以左的实轴段,
对应相角增大; 负穿越:曲线由下→上穿过(-1, j0 )点以左的实轴段,
对应相角减小。
穿越次数: 1——曲线完整穿越(-1, j0 )点以左的实轴一次;
③ 考察表中第一列各数符号 ▪ 第一列所有元素均大于0,则系统稳定; ▪ 第一列出现负数,则系统不稳定,而符号变化次数即系
统存在右极点数。
例:设系统特征方程
s5 +3s4 +2 s3+ s2 +5s + 6=0 解: ① a5=1 a4=3 a3=2 a2 =1 a1 =5 a0 =6 ,ai>0
解:闭环传递函数
Φ(s) = K / [s(0.1s+1)(0.25s+1) + K] R(s)