台达canopen教程
C2000 CANOPEN 应用范例
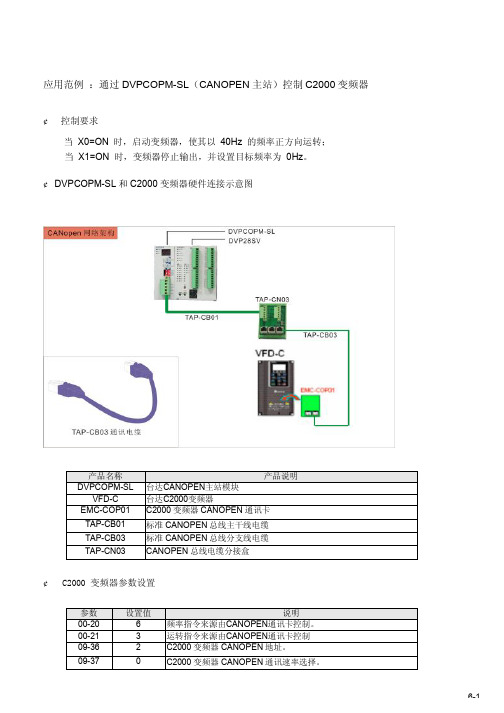
应用范例:通过DVPCOPM-SL(CANOPEN主站)控制C2000变频器¢控制要求当X0=ON 时,启动变频器,使其以40Hz 的频率正方向运转;当X1=ON 时,变频器停止输出,并设置目标频率为0Hz。
¢DVPCOPM-SL和C2000变频器硬件连接示意图产品名称产品说明DVPCOPM-SL 台达CANOPEN主站模块VFD-C 台达C2000变频器EMC-COP01 C2000变频器CANOPEN通讯卡TAP-CB01 标准CANOPEN总线主干线电缆TAP-CB03 标准CANOPEN总线分支线电缆TAP-CN03 CANOPEN总线电缆分接盒¢C2000 变频器参数设置参数设置值说明00-20 6 频率指令来源由CANOPEN通讯卡控制。
00-21 3 运转指令来源由CANOPEN通讯卡控制09-36 2 C2000变频器CANOPEN地址。
09-37 0 C2000变频器CANOPEN通讯速率选择。
0:1Mbps1: 500Kbps2: 250Kbps3: 125Kbps4: 100 Kbps5: 50Kbps09-30 0 变频器通讯解码方式选择。
0:20XX区域的地址有效。
1: 60XX区域的地址有效。
09-40 0 CANOPEN解码方式选择。
0:由C2000自己定义。
1:CANOPEN标准DS402规范。
09-45 0 C2000主从站模式选择。
0:C2000做CANOPEN从站。
1:C2000做CANOPEN主站。
¢此范例中按照下表分别对DVPCOPM-SL 主站模块、C2000变频器进行设置模块名称节点地址通讯速率DVPCOPM-SL 主站模块01 1M bpsC2000变频器02 1M bps备注:DVPCOPM-SL通讯速率、节点地址及接线可参考DVPCOPM-SL手册。
¢使用CANopenBuilder网络配置工具配置CANOPEN网络Ø EDS文件的添加EDS文件为文字档,用以描述设备的参数信息。
CANopen使用手册(V1.00)
CAN open使用手册ProNet伺服驱动器ESTUN修订记录日期修订版本描述作者2009/4/25 1.00 初稿完成移振华2009/9/22 1.00 增加第8章移振华—— 目录 ——1、概述 (5)1.1 CAN 主要相关文档 (5)1.2 本手册使用的术语和缩语 (5)1.3 CANopen概述 (6)2、接线和连接 (7)3、CANopen通讯 (8)3.1 CAN标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC报文 (20)3.5 Emergency报文 (21)3.6 HEARTBEAT报文 (23)3.7网络管理(NMT) (24)4、单位换算单元(Factor Group) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3 shutdown_option_code (39)6.2.4 disable_operation_option_code (40)6.2.5 quick_stop_option_code (40)6.2.6 halt_option_code (41)6.2.7 fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1 modes_of_operation (42)7.1.2 modes_of_operation_display (43)7.2 回零模式(HOMING MODE) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零方法 (47)7.3 速度控制模式(PROFILE VELOCITY MODE) (49)7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITION MODE) (53)7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN通讯相关参数 (58)附录对象字典表 (59)1、概述1.1 CAN 主要相关文档Document Name Source 3014.01: CiAVDSCiACANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiACANopen Device Profile1.2 本手册使用的术语和缩语CAN控制器局域网CiA在自动化国际用户和制造商协会中的 CAN。
台达CANopen现场总线产品通讯整合应用实例
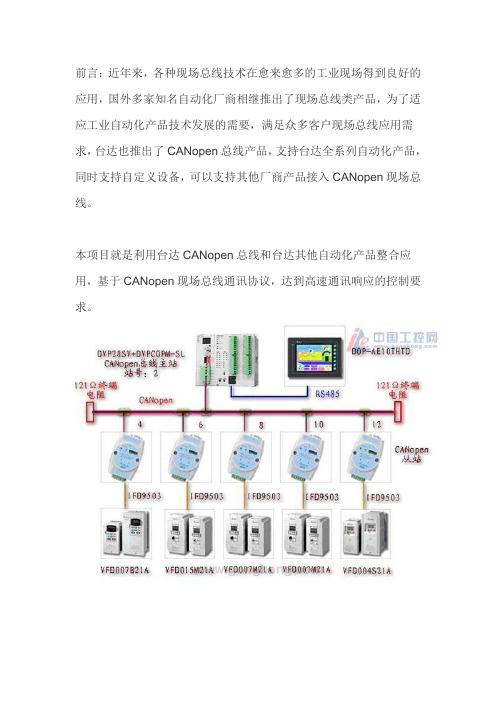
前言:近年来,各种现场总线技术在愈来愈多的工业现场得到良好的应用,国外多家知名自动化厂商相继推出了现场总线类产品,为了适应工业自动化产品技术发展的需要,满足众多客户现场总线应用需求,台达也推出了CANopen总线产品,支持台达全系列自动化产品,同时支持自定义设备,可以支持其他厂商产品接入CANopen现场总线。
本项目就是利用台达CANopen总线和台达其他自动化产品整合应用,基于CANopen现场总线通讯协议,达到高速通讯响应的控制要求。
控制系统技术方案配置:详见下表序号元件名称型号规格数量(台)备注1人机界面DOP-AE10THTD110.4”2PLC主机DVP28SV11R116K Step3CANopen主站DVPCOPM-SL1SV左侧高速扩展4CANopen从站IFD95035CANopen/Modbus5变频器VFD007B21A750W,单相220V6变频器VFD007M21A3750W,单相220V7变频器VFD004S21A1400W,单相220V上述表格仅列举出技术方案主要元器件,此外还包括121Ω终端电阻以及其他通讯连接电缆等辅助器件,此处均不予赘述。
控制系统原理框图简要介绍:采用CANopen现场总线作为通讯介质,主要为了实现多从站大量数据高速通信响应和提高通讯稳定性,和传统Modbus通讯协议比较,CANopen总线通讯协议有质的飞跃,数据通讯不再受到Modbus轮询方式的制约,大大提高了主从站之间的大量数据通讯响应速度和稳定性。
人机界面通过RS485和主站28SV PLC连接,28SV左侧高速并行接口连接CANopen总线主站模块DVPCOPM-SL,5台CANopen 总线从站模块IFD9503分别连接5台台达变频器,系统实现人机输入频率和启停命令,实时显示变频器输出频率、电流、电压等参数数值。
控制系统原理框图:人机界面画面如下:人机界面可以实现:分别设定5台变频器给定频率和启动、停止运转信号;可以分别显示5台变频器运行参数数据,包括输出频率、输出电流、输出电压等等。
CANopen使用手册_V1.01_.

ProNet 伺服驱动器ESTUNCANopen 使用手册修订记录日期修订版本描述作者初稿完成移振华增加第8章移振华1、第3,3,1章“PDO 参数”,修正PDO 默认表格中的COB-ID 和default 值;易健2、增加第9章“通讯例程”——目录——1、概述............................................................................................................................................ . (5)1.1 CAN 主要相关文档 (5)1.2 本手册使用的术语和缩语 (5)1.3 CAN OPEN 概述 (6)2、接线和连接 (7)3、CANOPEN 通讯 (8)3.1 CAN 标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC 报文 (20)3.5 E MERGENCY 报文 (21)3.6 HEARTBEAT 报文 (23)3.7网络管理(NMT ) (24)4、单位换算单元(FACTOR GROUP) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3shutdown_option_code (3)96.2.4disable_operation_option_code (40)6.2.5quick_stop_option_code (4)6.2.6halt_option_code (41)6.2.7fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1modes_of_operation (42)7.1.2modes_of_operation_display (43)7.2 回零模式(HOMINGMODE ) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零方法 (47)7.3 速度控制模式(PROFILE VELOCITYMODE ) (49)7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITIONMODE ) (53)7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN 通讯相关参数 (58)9、CANOPEN 通讯例程 (59)9.1 SDO 操作; (59)9.2 PDO 配置 (59)9.3 位置控制例子(P ROFILE P OSITON MODE ) (60)9.4 位置插补控制(I NTERPLATE P OSITION MODE ) (61)9.5 速度控制(P ROFILE V ELOCITY MODE ) (62)9.6 回零 (6)2对象字典表 (64)1、概述1.1 CAN 主要相关文档 CiA DS 301 V 4.01: CiA CANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiA CANopen Device Profile1.2 本手册使用的术语和缩语CANCiACOBEDSLMTNMTOD参数PDORORWSDO控制器局域网在自动化国际用户和制造商协会中的 CAN。
台达CANopen通讯伺服速度S控制

16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
CANopen通信

Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
关于CANopen通讯模块的使用方法
关于1 SICANopen通讯模块的使用方法一、STEP7硬件组态的建立:1、按实际硬件情况建立组态并将1 SI CANopen模块插入;3(0)inisi-8 nm CPU「1A2 ________ ms 1-8 P9/W "VIl n /irIFpjr-iDPert i,三12 P2 K Fort 2X1 P3\Are 31234PM-E DC24V5| 1 SI CANopen 32 Byt<6789101112ni- 4| co) imsi-8 PS/DP CPU怖稽[j 酸...订货号固一nn Jfiid i地址Q地址诊得地址注穿12即msi-s P9/DP CFV6IS7 151-GABO1-0A90Y3 22212047^Xi n *I*/冢如Il P2 l 1 foe 22(X5/力乃J P。
八3aw*的分1234y PH-E DC24y BEST 138-4CAOI-OAAO204A2043*5 1 1 SI CAKopon 32 Byte020570-B VI.0100. . 13!100. 13167在STEP 7硬件组态中,双击1 SI CANopen模块,在弹出的窗口中选择Addresses页面。
此处设置32个输入和输出字节的起始地址。
本例中起始地址设为十进制100。
2、1 SI CANopen模块的设置;在性-1 SI CANopen 32 Byte - (R0/S5)常规Addresses | Identification确定选择“参数”页面,设置“Baudrate”以及input/output data size,如上图所示。
PS:理论上Process data mode因为本次传输数据在32 Byte内,可选择Standard模式,但不知道为什么会报错,所以选择Fragmented模式。
双击STEP 7硬件组态中的CPU,选择“周期/时钟存储器”,修改过程映像输入/输出区的大小。
台达CANopen及A 伺服简易手册

台达产品简易操作手册(一)台达A2伺服马达接头及对应线序(二)台达A2伺服编码器对应接口视图及线序(三)台达A2伺服PR模式参数设定及对应关系表模式设定P1‐01=1DI1=101伺服使能DI2=108相应PR触发DI3=111(POS0)DI4=112(POS1)DI5=113(POS2)DI6=11A(POS3)DI7=11B(POS4)DI8=11C(POS5)一点说明:(1) 当选定一个PR需要运行时,请首先选择,然后在一点延时触发,这样保证能够运行起来,因为触发是脉冲沿有效。
(2) 当需要行走的距离很长时,PR设定的脉冲无法满足要求是,请设定电子齿轮比,相关参数为P1‐44,P1‐45,电子齿轮比是全局参数,一旦设定所有的PR都按照这个比例行走。
(四)CANopen组态介绍1.首先需要安装台达相应的组态软件CANopen Builder,图标如下图2.安装完成如下图3.开始组态步骤一,如下图一图一4.操作如下:请双击右侧窗口的相应的伺服图片,出现如下窗口。
图二4.开始组态步骤三,配置PDO ,如下图三操作如下:窗口1(如下图)的C 部分,打开时可能有默认数据,如有则没有关系可以把它删除掉,然后根据实际需要进行重新配置。
PDO 里面的Rceive PDO Comm…表示伺服接收的内容,即上位机发送给伺服。
PDO 里面的Transmit PDO Comm…表示伺服发出的内容,即上位机从伺服接收。
双击此图标图三5.开始组态步骤四,配置PDO ,如下图四‐1,图四‐2 操作如下:(1)双击窗口1里面的C 部分的一个参数,出现窗口 图四‐1,如下图四‐1在“参数群”部分选择需要的参数,这里必须需要选择P4‐07,利用“下移”按钮进行选择,也可利用“上移”按钮进行移除。
完毕之后确定即可。
(2)双击窗口1里面的C 部分的另外一个参数,同样出现窗口 图四‐2,如下图四‐2 在“参数群”部分选择需要的参数,这里根据需要可以选择P0‐01(伺服报警),利用“下移”按钮进行选择,也可利用“上移”按钮进行移除。
台达Canopen总线应用

添加PDO PDO映射
Delta Confidential
确定控制对象或参数
DS301协议: 如果应用的是DS301模式,需要根据项目要求确定需要通过Canopen进行交 换的伺服参数,例如P3-06 DS402协议: 如果应用的是DS402协议,需要根据项目要求,确定必须的控制对象,例如 控制字6040H。 以上参数及控制字根据项目不同是不同的,每个项目都需要在对项目工艺本身 进行详细了解之后确定
Canopen总线
公司:中达电通股份有限公司 部门:运动控制产品处(IMS) 日期:2013年12月01
内容大纲
Canopen总线型伺服
A2-M
硬件连接&参数设置
硬件连接,站号,通讯协议,通信波特率
上位配置
通讯设置,网络搭建,总线配置
Delta Confidential
Canopen总线伺服A2-M
Delta Confidential
DS031&DS402
DS301协议: 单纯通讯协议,上位机可以通过DS301协议,读写驱动器中的参数,在速度、位置、 扭矩模式下都可以使用。 例如在PR模式下,可以通过DS301下载PR路径参数及触发命令。 DS402协议: 一种现场运动控制协议,上位机可以设置驱动器工作在PP、PV、IP或者Home等模 式下进行操作。驱动器需设置在0B或0C模式下(P1-01) 在此协议下,驱动器只需设置工作模式,站号,通讯波特率。其他一切配置及控制 逻辑都有上位机根据协议规定下达指令就可以了。
Delta Confidential
Smarter. Greener. Together. 共创智能绿生活
谢谢
想深入了解中达电通,请浏览
工作模式(P1-01):0B或者0C 驱动器站号(P3-00):按顺序设置,不可重复 通讯波特率(P3-01):与上位机保持一致
台达CANOPEN模块
台达PLC通讯控制伺服教程
4
A
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入
(1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
5
A
PDO配置
6
A
PDO配置 7
A
P4-07位控制定义8A9 NhomakorabeaA
10
A
11
A
伺服通过软件设置站号、通信格式、波 12 特率
属性设置为同步 P5-05 (回零第一段速) RX1401 P5-75 (运行速度) RX1401 P6-03 (运行位置) RX1402 P6-21 (待机位置) RX1402 读; P0-01 (伺服报警) TX1800 P0-09 (伺服当前位置) TX1800
以下
修改监控时间,延长通讯时间
A
5;显示外部给定目标位置
18
A
A
19
定位控制时P6-03为位置来源
1;点击原点复归模式
2;选择到路径10(路径10设置为回零点进行设置)
16
3;选TYPE路径型式
4;选位置命令
A
5;选运行速度
6;p621待机位给定目标位置
决对定位伺服软件设置: (决对定位路径1设置)
1;选择到路径10
2;选TYPE路径型式
17
3;选位置命令终点
4;选运行速度(选择PLC-PDO配置运行速度P5-75)
1
A
台达PLC以Canopen控制伺服
2
在线描硬件,
SDO自动配置
A
SDO配置内容
3
A
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
台达CAN模块与BECKHOFF_CAN主站通讯实现方法
台达CAN模块与BECKHOFF_CAN主站通讯实现方法台达CAN模块与BECKHOFF CAN主站通讯实现方法摘要:本文主要介绍基于标准的CANopen协议,如何实现不同厂牌工业产品之间的高速通讯。
以台达COPM-SL 模块和BECKHOFF EL6751系列CAN主站为例。
关键词:CANopen、主站、高速通讯实现步骤:一、首先打开Delta CANopenBuilder软件。
〉Master parameter。
1,单击Network—2,弹出对话框,如下进行设置,设置完毕后,单击OK。
3,单击Network—〉Online:4,弹出对话框如下,将Simulated online选中,单击OK。
5,单击Network—〉Download:6,等待进度条进行,当进度条结束后,以下对话框会自动消失,如果单击“OK”,则会取消这次下载。
二、通过Twincat PLC Control建立beckhoff PLC程序,将D32——D63设置成T %I* :INT 类型,将D0——D31设置成AT %Q* :INT类型。
A1,打开TwinCAT System Manager软件2,在configuartion状态下进行扫描,扫描出Ethercat slave EK1100,以及EL6751模块。
3,将波特率设置成和从站一样的速率125K。
4,左键单击“Device 2(EL6751)”,单击“Append BOX…” 5,选中“CANopen Node”,单击OK。
6,在新建的Box4中插入“TxPDO1”,“RxPDO1”7,在“TxPDO1”,“RxPDO1”中分别插入4个 UINT类型数据。
,但分别注意,“TxPDO1”与“RxPDO1”起始数据地址都为0 (0x0),SIZE为2是两个数据区。
新建TxPDO,或在TxPDO1下新建数据,必须依次往下设置,不如TxPDO1下面的4个UINT类型数据地址分别为0,2,4,6。
M340与ATV71的CANopen通信(CANopen通信给定速度、数字量输出控制启停)_快速操作指南
4,禁止电机缺相故障
图形显示终端的设置如下:
RDY Term
+0.0Hz
1 变频器菜单
1.5 输入/输出设置
1.6 命令
1.7 应用功能
1.8 故障管理 1.9 通讯
0.0A
Code
<<
>>
QUICK
按 ENT 进 入,并旋转导 航键选择 电机缺相
RDY HMI
+0.0Hz
1.8 故障管理 自动重起动
CAn
2
CTL-CHCF
Sep
3 4
CTL-Cd1 Flt-OPL
控制方式
tEr No
5
IO-rrS
LI2
6
FLt-rSF
LI3
7 8
CON-AdC0 CON-bdC0
通信参数
3 500
变频器上电后,即可根据以下的 8 个图快速完成相关参数的设置:
集成显示终端的设置如下:
1,配置给定 1 为 can
10
施耐德技术服务中心 TSC
集成显示终端的设置如下:
8,CANopen 通信速率设为 500bits/s
图形显示终端的设置如下:
RDY HMI
+0.0Hz
1 变频器菜单
1.5 输入/输出设置
1.6 命令
0.0A
1.7 应用功能 1.8 故障管理 1.9 通信
Code
<<
>>
QUICK
RDY HMI
2.《完全通信指导》---Know Why, 满足了客户“系统学习通信知识”的需求。
知识全---不仅给出了详细的调试步骤和详细解释,还使客户在完成通信的同时系统学习相关 的产品和通信知识
es3台达canopen位置模式原点
让我们先来掅清楚“es3台达canopen位置模式原点”这个主题的基本概念。
在此之前,我们需要了解一些相关的背景知识。
ES3是一种工业控制器产品,而台达则是其生产厂家。
而CANopen则是一种通信协议,用于实现不同设备之间的数据交换和通信。
在工业自动化领域,通常会使用CANopen协议来实现设备之间的联动和协同工作。
接下来,让我们来探讨一下“位置模式原点”的概念。
在工业控制中,位置模式原点是指机器或设备运动时的起点或参考点。
它可以是机床上的某一特定位置,也可以是其他类型设备上的特定位置。
在控制系统中,通过设定位置模式原点,可以实现设备的精确定位和运动控制。
现在,我们可以开始着手撰写关于“es3台达canopen位置模式原点”的文章了。
我们可以从基本概念和背景知识入手,以便读者能够更好地理解这个主题。
我们可以深入探讨ES3控制器在CANopen通信协议下如何实现位置模式原点的设置和控制,以及其在工业自动化中的实际应用。
在文章的主体部分,我们可以逐步展开讨论,介绍ES3控制器如何通过CANopen协议与其他设备进行通信,以及如何在这个过程中实现位置模式原点的设定。
我们可以举例说明不同类型设备上的位置模式原点设置方法,并分析其优缺点。
还可以探讨在工业生产中,位置模式原点对于设备精确定位和运动控制的重要性,以及如何通过ES3控制器和CANopen协议来实现更高效的生产。
在文章的结尾部分,我们可以对所讨论的内容进行总结和回顾,重点强调ES3控制器在CANopen通信协议下的位置模式原点设置和应用。
可以共享个人对这个主题的观点和理解,以及对未来发展趋势的展望。
为了更好地向读者呈现相关内容,我们可以使用序号标注的方式,将不同的观点和案例进行排列,以便更清晰地展现出文章的结构和逻辑。
我们还可以多次提及“es3台达canopen位置模式原点”,以强调文章的核心主题。
我们需要注意文章的整体字数,确保其达到3000字以上的要求。
CANopen教程全解
七、CANopen与DeviceNet区别
1.传输距离 CANopen网络可实现远距离传输 (≤10 km),工作速率可调(1 Mb/s≥ 通讯 速率≥ 5 kb/s)。 DeviceNet最大传输距离为500 m。 因此,在实际应用中,要考虑到传 输距离的限制而选择总线协议。
七、CANopen与DeviceNet区别
五、仲裁机制
(2)网络中的节点检测到硬件或软件的错误可 将其通过紧急对象通知其它节点。内部的任何 错误都将被编码为定义好的错误代码传送给其 他节点,如果错误全部被纠正,则节点将发送 一个带有代码“无错误”的报文。
六、差分传输
CAN总线采用差分信号传输,通常情况下只需要两根信 号线(CAN-H和CAN-L)就可以进行正常的通信。在干 扰比较强的场合,还需要用到屏蔽地即CAN-G(主要功 能是屏蔽干扰信号),CAN协议推荐用户使用屏蔽双绞 线作为CAN总线的传输线。在隐性状态下,CAN-H与 CAN-L的输入差分电压为0 V(最大不超过0.5 V),共模输 入电压为2.5 V。在显性状态下,CAN-H与CAN-L的输入 差分电压为2 V(最小不小于0.9 V),如图 1所示。
(1)、AI 主结点定时每隔8毫秒读取AI结点的数据
四、状态机
(1)一个从节点可以实现一个NMT状态机,NMT状态 机如下图:
四、状态机
该状态机将在上电复位后自动运行,进入预运行状态, 通过SDO配置参数,但不可以实现PDO通信。 NMT主节点可以控制所有的从节点进入“运行状态”。 在“运行状态”PDO的通信才被允许。 如果一个节点被转换到“停止状态”,那么它将不能 实现PDO和SDO通信,但可以执行NMT命令。
(2楼)1.要结合网络节点数据吞吐量来看,DI、AI变化 发送(触发)方式实时性好,而且比主节点定时查询 方式占用网络资源少,缺点是万一触发发送失败,没 有第二次机会让主节点知道变化,只能等到下一次变 化,而且触发发送还有个变化多大幅度才触发发送的 问题,幅度小了可能是场数据灾难,大了可能灵敏度 有下降。定时申请数据的查询方式优点就是触发的缺 点,缺点也就是触发的优点。两种方式结合着来,一 般AI采用查询方式,DI就要综合考虑了。 2.AO和DO一般采用触发方式
台达工控产品canopen解决方案

台达工控产品canopen解决方案台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
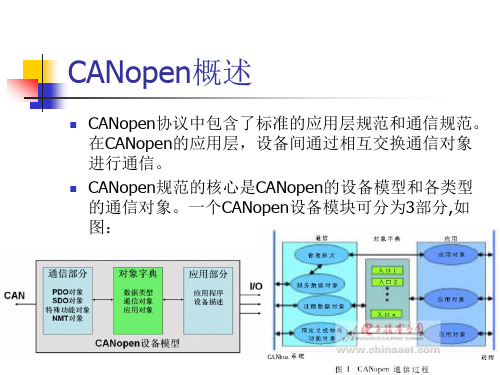
Abstract: In this paper, the solution in CANopen for Deltaindustrial products is presented, whichdisplays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络 (Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
台达工控产品CANopen解决方案

台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Delta industrial products is presented, which displays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络(Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
A.DVPCOPM-SL具备特性为:●CANopen通讯主站,可连接127个站点;●最快通讯速率达到1M bps;●最长的网络长度可支持1000m(配合合适的通讯速率和物理线材);●具有同步和异步的通讯能力;B.C2000具备的特性为:●支持CANopen主站连接(仍在测试中);●CANopen通讯直接连接无需转换;●最快通讯速率达到1M bps;●By Pass连接功能(搭配外部扩展卡);C.A2具备的特性为:●最快通讯速率达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;●By pass 连接功能;D.E-C具备的特性为:●最快通讯速度达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;可以看出,台达工控产品中,真正能实现CANopen直接通讯的非控制类产品目前为C2000变频器、A2伺服驱动器以及E-C变频器,之所以称为直接通讯是因为其无需通讯模式的转换,而直接采用CANopen物理连接。