塔吊的受力资料分解
塔吊计算书
QTZ80塔吊格构基础设计计算书基本参数1、塔吊基本参数塔吊型号:QTZ80;塔吊自重Gt:490kN;最大起重荷载Q:60kN;塔吊起升高度H:40.50m;塔身宽度B: 1.6m;2、格构柱基本参数格构柱计算长度lo:5.9m;格构柱缀件类型:缀板;格构柱缀件节间长度a1:0.6m;格构柱分肢材料类型:L160x14;格构柱基础缀件节间长度a2:0.6m;格构柱钢板缀件参数:宽420mm,厚10mm;格构柱截面宽度b1:0.50m;格构柱基础缀件材料类型:L160x14;3、基础参数桩中心距a:2.8m;桩直径d:0.9m;桩入土深度l:18.5m;桩型与工艺:泥浆护壁钻(冲)孔灌注桩;桩混凝土等级:C30;桩钢筋型号:HRB400;桩钢筋直径:25mm;承台宽度Bc:4.6m;承台厚度h:1.35m;承台混凝土等级为:C35;承台钢筋等级:HRB400;承台钢筋直径:25;承台保护层厚度:100mm;承台箍筋间距:200mm;4、塔吊计算状态参数地面粗糙类别:B类田野乡村;风荷载高度变化系数:2.09;主弦杆材料:角钢/方钢;主弦杆宽度c:140mm;非工作状态:所处城市:福建莆田市,基本风压ω0:0.70 kN/m2;额定起重力矩Me:800kN·m;基础所受水平力P:74kN;塔吊倾覆力矩M:1712kN·m;工作状态:所处城市:福建莆田市,基本风压ω0:0.7 kN/m2,额定起重力矩Me:800kN·m;基础所受水平力P:18.9kN;塔吊倾覆力矩M:1718kN·m;非工作状态下荷载计算一、塔吊受力计算1、塔吊竖向力计算承台自重:G c=25×Bc×Bc×h=25×4.60×4.60×1.35=714.15kN;作用在基础上的垂直力:F k=Gt+Gc=490.00+714.15=1204.15kN;2、塔吊倾覆力矩总的最大弯矩值M kmax=1712.00kN·m;3、塔吊水平力计算挡风系数计算:φ = (3B+2b+(4B2+b2)1/2)c/Bb挡风系数Φ=0.46;水平力:V k=ω×B×H×Φ+P=0.70×1.60×40.50×0.46+74.00=94.87kN;4、每根格构柱的受力计算作用于承台顶面的作用力:F k=1204.15kN;M kmax=1712.00kN·m;V k=94.87kN;图中x轴的方向是随时变化的,计算时应按照倾覆力矩Mmax最不利方向进行验算。
塔吊基础计算
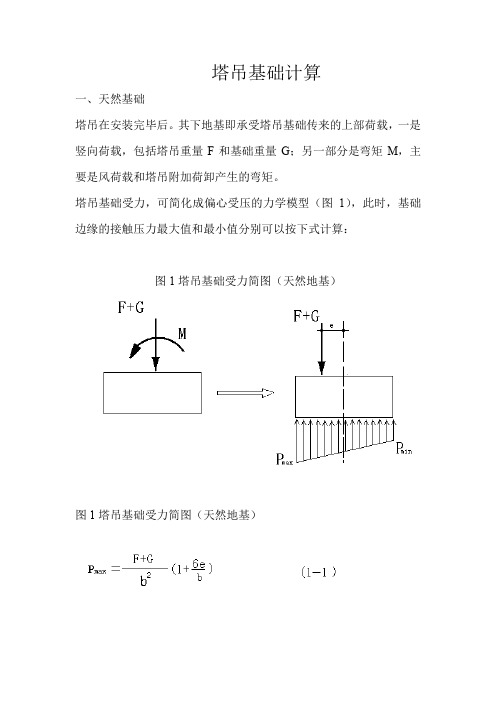
塔吊基础计算一、天然基础塔吊在安装完毕后。
其下地基即承受塔吊基础传来的上部荷载,一是竖向荷载,包括塔吊重量F和基础重量G;另一部分是弯矩M,主要是风荷载和塔吊附加荷卸产生的弯矩。
塔吊基础受力,可简化成偏心受压的力学模型(图1),此时,基础边缘的接触压力最大值和最小值分别可以按下式计算:图1塔吊基础受力简图(天然地基)图1塔吊基础受力简图(天然地基)其中:F————塔吊工作状态的重量,单位KNG————基础自重,单位KNG=b×b×h×ρ,单位KNb×h———基础边长、厚度,单位mρ——————基础比重,取25KN/m3e————偏心距,单位me=M/(F+G)M————塔吊非工作状态下的倾覆力矩。
若计算出的P min<0,即基底出现拉力,由于基底和地基之间不能承受拉力,此时基底接触压力将重新分布。
应按下式重新计算P maxF、M可由塔吊说明书中给出,将计算得出的最大接触压力P max和地质资料中给出的地基承载力标准值相比较,小于地基的承载力标准值即可满足要求。
二、桩基础对于有桩基础的塔吊,必须验算桩基础的承载力。
根据计算分析,在非工作状态下,塔吊大臂垂直于基础面对角线时最危险。
当以对角两根桩的连线为轴(图2—1),产生倾覆力矩时,将由单桩受力,此时桩的受力为最不利情况。
图2—1桩基础1、受力简图图2—2塔吊基础受力简图(桩基础)2、荷载计算当只受到倾覆力矩时:当只受到基础承台及塔吊重力时:3、单桩荷载最不利情况3、单桩最小荷载若计算出的P2<0,即桩将受到拉力,拉力为|P2|L———桩的中心距。
4、单桩承载力单桩的受压承载力由桩侧摩阻力共同承担的,单桩受压承载力为:单桩的抗拔承载力由桩侧摩阻力承担,单桩抗拔力为:R K2=U P∑q Si L i (2—6)其中:q p—————桩端承载力标准值,KP aA P—————桩身横截面面积,m2U—————桩身的周长,mPq Si—————桩身第I层土的摩阻力标准值,KP A kL i—————按土层划分的各段桩长,m将计算所得的P1和R K1相比较,|P2|和R K2相比较,若P1< R K1且|P2|< R K2则可满足要求。
高层建筑机械——塔式起重机的受力分析
毕业设计题目高层建筑机械——塔式起重机的受力分析塔式起重机的受力分析文献综述1.引言塔式起重机是用来对物料进行起重、运输、装卸和安装等作业的机械设备。
随着生产规模日益扩大,特别是现代化、专业化生产的要求,在许多重要的部门中,起重机己经成为不可缺少的重要机械设备,它的发展对国民经济建设起着积极的促进作用。
1.1 塔式起重机的基本概念塔式起重机是现代工业和民用建筑的主要施工机械之一。
据资料记载,塔式起重机溯源于西欧,有关建筑用塔式起重机的第一项专利颁发于1900年。
近代塔式起重机的首批原型样机出现于1912年。
1923年研制成功第一台比较完整的近代塔式起重机。
30年代,德国已开始批量生产塔式起重机并在建筑工地上使用,与此同时,还向国外出口。
1914年公布了建筑用塔式起重机的德国工业标准DIN8670,规定以吊载(吨)和幅度(米)的乘积(吨·米)——起重力矩表示塔式起重机的起重能力[1]。
而早在商朝(公元前1765年到1760年之间),我国劳动人民就使用了汲水的桔棒,它是一种类似塔式起重机的机构,长期以来我国没有自已的起重机制造业,直到新中国成立后,才建立独立制造各种起重机的工业体系。
在生产和使用塔式起重机上,我国起步较晚。
1953年,在北京劳动人民文化宫第一次展出前民主德国的建筑师I型塔式起重机。
1954年,东北抚顺重型机器厂仿建筑师I型试制了TQ2-6型塔式起重机,这是我国自制的第一台塔式起重机。
同年在北京航空学院教学楼施工吊装,这是我国第一次在建筑工地上使用塔式起重机[2]。
在建筑安装工程中,能同时完成重物的垂直升降和水平移动的起重机械很多,其中应用最广泛的是塔式起重机。
因为它具有其他起重机械难以相比的优点。
如:塔身高,起重臂装于塔身顶部,有效起升高度大;起重臂长,有效作业面广;能同时进行起升、回转、行走、变幅等动作,生产效率高;采用电力操纵,动作平稳,安全可靠;和其他起重机械相比,结构较为简单,运转可靠,保养维修也较为容易。
塔吊扶墙点的受力计算

塔吊扶墙点的受力计算F0/23B塔吊为例,来研究其扶墙位置所受的力的状况。
四川建机厂生产的F0/23B其起重臂长50m,重73.1KN ,吊点(重心)在18.8m; 平衡臂长10.90m, 重71KN,吊点(重心)在6.5m ;配重重161KN,总重心在8m。
独立自由高度59.8m,第一道扶墙位置在45m处,扶墙以上允许15个标准节,每个标准节的高度为3m.。
塔吊起重量在50m长时吊重23KN,在0--14.5m之间可以吊重100KN。
一、起重臂与平衡臂产生的最大力矩作用在扶墙点上所产生的力。
由于塔吊的受力可以简化为一个中间与地面铰接的杠杆状的悬臂梁,因此它的受力也简化为力矩及力的计算了。
由于塔吊在垂直方向上的受力总体上(塔吊重量及吊重与地基支座反支力)和为零,且只在垂直方向上的受力产生了一个力矩(见图2).因此在垂直方向的计算如下:首先,以塔身支点为中心计算平衡臂与起重臂所产生的最大力矩。
塔吊在平时不扶墙时有三种状态:㈠塔吊不吊重时:平衡臂端:8m×161KN+6.5m×71KN=1749.5KNm起重臂端:18.8m×73.1KN=1374.3KNm产生的力矩为:375.2KNm㈡塔吊在14.5m吊最大重量100KN时:平衡臂端:8m×161KN+6.5m×71KN=1749.5KNm起重臂端:18.8m×73.1KN+14.5m×100KN=2824.3KNm产生的力矩为:1074.8 KNm㈢塔吊在起重臂最长50m处吊23KN重量时:平衡臂端:8m×161KN+6.5m×71KN=1749.5KNm起重臂端:18.8m×73.1KN+50m×23KN=2524.3KNm产生的力矩为:774.8KNm因此, 塔吊在14.5m吊最大吊重100KN这种状态时,起重臂与平衡臂产生的力矩最大,最大力矩为:1074.8 KNm.由于塔吊在工作时会产生一个如上面所述的力矩,但在不扶墙时这个力矩被塔吊基础所产生的反向力矩所抵消.而一旦扶墙之后,这个力矩的抵消任务就要由扶墙点与塔吊的基础产生的反向力矩来抵消了(见图5).因为整个塔吊的模型已经简化为一个杠杆所产生模型了.而反向力矩也转移到了由扶墙点与支座反力形成的力偶来产生了,因此,当塔吊所受的力矩一定时,扶墙点的受力与塔吊扶墙点与塔吊基础支座之间的距离有关. 当塔吊所受的力矩一定时,当塔吊扶墙点与塔吊基础支座之间的距离变大时,扶墙点的受力变小。
塔吊计算书讲解
QTZ80塔吊格构基础设计计算书基本参数1、塔吊基本参数塔吊型号:QTZ80;塔吊自重Gt:490kN;最大起重荷载Q:60kN;塔吊起升高度H:40.50m;塔身宽度B: 1.6m;2、格构柱基本参数格构柱计算长度lo:5.9m;格构柱缀件类型:缀板;格构柱缀件节间长度a1:0.6m;格构柱分肢材料类型:L160x14;格构柱基础缀件节间长度a2:0.6m;格构柱钢板缀件参数:宽420mm,厚10mm;格构柱截面宽度b1:0.50m;格构柱基础缀件材料类型:L160x14;3、基础参数桩中心距a:2.8m;桩直径d:0.9m;桩入土深度l:18.5m;桩型与工艺:泥浆护壁钻(冲)孔灌注桩;桩混凝土等级:C30;桩钢筋型号:HRB400;桩钢筋直径:25mm;承台宽度Bc:4.6m;承台厚度h:1.35m;承台混凝土等级为:C35;承台钢筋等级:HRB400;承台钢筋直径:25;承台保护层厚度:100mm;承台箍筋间距:200mm;4、塔吊计算状态参数地面粗糙类别:B类田野乡村;风荷载高度变化系数: 2.09;主弦杆材料:角钢/方钢;主弦杆宽度c:140mm;非工作状态:所处城市:福建莆田市,基本风压ω0:0.70 kN/m2;额定起重力矩Me:800kN·m;基础所受水平力P:74kN;塔吊倾覆力矩M:1712kN·m;工作状态:所处城市:福建莆田市,基本风压ω0:0.7 kN/m2,额定起重力矩Me:800kN·m;基础所受水平力P:18.9kN;塔吊倾覆力矩M:1718kN·m;非工作状态下荷载计算一、塔吊受力计算1、塔吊竖向力计算承台自重:G c=25×Bc×Bc×h=25×4.60×4.60×1.35=714.15kN;作用在基础上的垂直力:F k=Gt+Gc=490.00+714.15=1204.15kN;2、塔吊倾覆力矩总的最大弯矩值M kmax=1712.00kN·m;3、塔吊水平力计算挡风系数计算:φ = (3B+2b+(4B2+b2)1/2)c/Bb挡风系数Φ=0.46;0×1.60×40.50×0.46+74.00=94.87kN;水平力:V k=ω×B×H×Φ+P=0.74、每根格构柱的受力计算作用于承台顶面的作用力:F k=1204.15kN;M kmax=1712.00kN·m;V k=94.87kN;图中x轴的方向是随时变化的,计算时应按照倾覆力矩Mmax最不利方向进行验算。
塔吊的受力资料分解

塔吊分析报告——理论力学车辆工程(3)班李晓学号:20052654程驰学号:20052735乔同超学号:20052682张兴华学号:20052660总述1.塔吊综述1.1塔吊外型1.2塔吊的组成1.3我国塔吊发展历程1.4塔吊的作用1.5塔吊结构图1.6塔吊的分类示例2.塔吊分析2.1塔吊静力学分析2.2塔吊运动学分析2.3塔吊动力学分析3. 塔吊常见事故分析及对策3.1 塔吊重大事故分析3.2 对策4. 塔吊现存问题及发展前景4.1 我国塔式起重机存在的主要问题4.2 塔吊的未来发展前景5. 小组总结★1.塔吊综述1.1塔吊外型塔吊,即塔式起重机(如图1-1所示),机身很高,像塔,有长臂,轨道上有小车,可以在轨道上移动,工作面很大,主要用于建筑工地等处。
1.2塔吊的组成塔吊一般由外套架、回转轴承、塔冒、平衡臂、平衡臂拉杆、起重臂(吊臂)、起重臂拉杆、电源、支架、变幅小车,起重吊钩、驾驶室等几部分组成。
另外工作时塔机安全装置还应主要包括:行程限位器和荷载限制器。
行程限位器有:起升高度限位器、回转限位器、幅度限位器。
荷载限制器有:起重力矩限制器、起重量限制器此外还应包括风速仪。
1.3我国塔吊发展历程塔式起重机是我们机械建筑的关键设备,在建筑施工中起着重要作用,我国的塔吊制造如今已跻身于当代国际市场。
五十年代初,我国塔机的制开始起步,生产的是一些小型塔机,六十年代自行设计制造了25TM、40TM、60TM、160TM四种机型,多以摆臂为主;七十年代,随着高层建筑发展,对施工机械提出了新的要求。
于是,160TM附着式、45TM内爬式、120TM自升式等都由我国自己设计并制造;八十年代,国家建设突飞猛进,建筑用最大的250TM塔机也应运而生。
特别是1984年,首先在北京建工集团建机厂引进世界先进的法国POTAIN(波坦)公司技术并于次年成功试制了FO/23B塔机,这可以说是我国塔机发展史的里程碑,它大大缩短了我国与国外的差距,使我国塔机发展步入快行道。
塔吊基础受力计算
三桩基础计算一、塔吊的基本参数信息塔吊型号:QTZ63,塔吊起升高度H=101.00m,塔吊倾覆力矩M=630.00kN.m,混凝土强度等级:C35,塔身宽度B=1.60m,基础以上土的厚度D=1.50m,自重F1=450.80kN,基础承台厚度Hc=1.00m,最大起重荷载F2=60.00kN,基础承台宽度Lc=4.00m,钢筋级别:II级钢,桩直径或者方桩边长=0.60m,桩间距a=2.50m,承台箍筋间距S=200.00mm,承台砼的保护层厚度=50.00mm。
二、塔吊基础承台顶面的竖向力与弯矩计算塔吊自重(包括压重)F1=450.80kN,塔吊最大起重荷载F2=60.00kN,作用于桩基承台顶面的竖向力F=1.2×(F1+F2)=612.96kN,塔吊的倾覆力矩M=1.4×630.00=882.00kN.m。
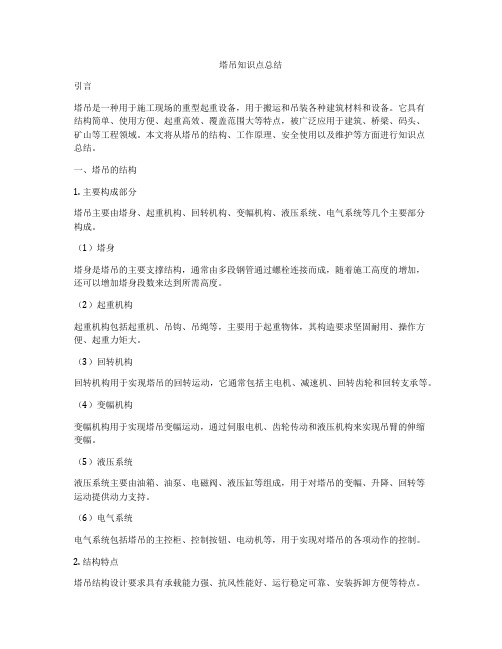
三、矩形承台弯矩的计算计算简图:图中x轴的方向是随机变化的,设计计算时应按照倾覆力矩M最不利方向进行验算。
1. 桩顶竖向力的计算(依据《建筑桩技术规范》JGJ94-94的第5.1.1条)其中 n──单桩个数,n=3;F──作用于桩基承台顶面的竖向力设计值,F=612.96kN;G──桩基承台的自重,G=1.2×(25×1.732×Bc×Bc×Hc/4+20×1.732×Bc×Bc×D/4)=457.26kN;Mx,My──承台底面的弯矩设计值,取882.00(kN.m);xi,yi──单桩相对承台中心轴的XY方向距离(m);Ni──单桩桩顶竖向力设计值(kN)。
经计算得到单桩桩顶竖向力设计值:最大压力:N=(612.96+457.26)/3+(882.00×2.50×1.732/3)/[(2.50×1.732/3)2+2×(2.50×1.732/6)2]=764.12kN。
QTZ6015塔吊基础计算

附:QTZ6015塔吊基础计算1、塔吊概况本塔吊选型为QTZ6015,拟采用钢筋混凝土四桩承台基础,借用四根工程桩作为基础桩,塔吊位于SR/SP/S7/S8轴区域,布设位置如下图:2、TC6015A-10E塔吊基础受力塔吊支座反力标准值M1=5100KN.mN=760KNV=117KN荷载系数取1.4承台尺寸见布置图:长:6945mm,宽:6769mm,高:1200mm承台自重:25×(6.945×6.735×1.2)=1403KN塔吊荷载及承台自重主要由四根工程桩来承担。
由于此承台形状为平行四边形而非矩形,需计算各工况后方可确定最大值。
工况一:塔吊大臂沿X方向时:每根桩分担的荷载为:压力\拉力:1.2×14034⁄+1.4×7604⁄±1.4×(5100+117×1.2)(5.315×2)⁄={1377.1KN−3.3 KN工况二:塔吊大臂平行于Y 方向时: 每根桩分担的荷载为:压力\拉力:1.2×14034⁄+1.4×7604⁄±1.4×(5100+117×1.2)(5.163×2)⁄={1397.4KN −23.6 KN工况三:塔吊大臂平行于长斜边时: 每根桩分担的荷载为:压力\拉力:1.2×14034⁄+1.4×7604⁄±1.4×(5100+117×1.2)7.805⁄={1626.9KN−253.1 KN压力: 1.2×14034⁄+1.4×7604⁄=686.9KN 工况四:塔吊大臂平行于短斜边时: 每根桩分担的荷载为:压力\拉力:1.2×14034⁄+1.4×7604⁄±1.4×(5100+117×1.2)7.036⁄={1729.6KN−355.8 KN压力: 1.2×14034⁄+1.4×7604⁄=686.9KN 综合以上分析桩分担的最大荷载为: 压力: F1=1729.6 KN 拉力: F2=−355.8 KN 3、塔吊承台受力计算3.1承台受弯计算板式承台抗弯计算的主要问题是确定外荷载引起的弯矩,在确定弯矩后,即可按《混凝土结构设计规范》(GB50010-2010)计算承台的配筋。
塔吊知识点总结
塔吊知识点总结引言塔吊是一种用于施工现场的重型起重设备,用于搬运和吊装各种建筑材料和设备。
它具有结构简单、使用方便、起重高效、覆盖范围大等特点,被广泛应用于建筑、桥梁、码头、矿山等工程领域。
本文将从塔吊的结构、工作原理、安全使用以及维护等方面进行知识点总结。
一、塔吊的结构1. 主要构成部分塔吊主要由塔身、起重机构、回转机构、变幅机构、液压系统、电气系统等几个主要部分构成。
(1)塔身塔身是塔吊的主要支撑结构,通常由多段钢管通过螺栓连接而成,随着施工高度的增加,还可以增加塔身段数来达到所需高度。
(2)起重机构起重机构包括起重机、吊钩、吊绳等,主要用于起重物体,其构造要求坚固耐用、操作方便、起重力矩大。
(3)回转机构回转机构用于实现塔吊的回转运动,它通常包括主电机、减速机、回转齿轮和回转支承等。
(4)变幅机构变幅机构用于实现塔吊变幅运动,通过伺服电机、齿轮传动和液压机构来实现吊臂的伸缩变幅。
(5)液压系统液压系统主要由油箱、油泵、电磁阀、液压缸等组成,用于对塔吊的变幅、升降、回转等运动提供动力支持。
(6)电气系统电气系统包括塔吊的主控柜、控制按钮、电动机等,用于实现对塔吊的各项动作的控制。
2. 结构特点塔吊结构设计要求具有承载能力强、抗风性能好、运行稳定可靠、安装拆卸方便等特点。
(1)承载能力塔吊的结构设计要求具有足够的承载能力,能够满足施工中的吊装和起重需求。
(2)抗风性能塔吊在施工现场通常会受到一定的风力影响,因此其结构设计要求具有良好的抗风性能,能够确保在强风天气中的安全使用。
(3)运行稳定可靠塔吊的结构设计要求能够保证其在工作中的运行稳定,并且具有良好的可靠性,能够长时间连续作业。
(4)安装拆卸方便塔吊的结构设计应当考虑到安装和拆卸的方便性,使其能够快速安装到位并且方便进行拆卸运输。
二、塔吊的工作原理1. 吊臂的升降塔吊吊臂的升降是通过液压缸和液压系统提供的动力驱动,通过控制按钮或者遥控器来实现对吊臂的升降操作。
QTZ80塔吊计算书
一.参数信息1. 塔吊参数:塔吊型号: QTZ80塔身宽度B=1.7m,未采用附着装置前,基础受力为最大,有关资料如下表:工况塔机垂直力F v(kN)水平力F h(kN)倾覆力矩M(kN﹒m)工作状态663.4 38.36 1286.59非工作状态603.4 98.2 2546.642. 承台参数:承台厚度:h=1.25m承台宽度:b=3m混凝土强度等级: C30承台主筋:双层双向20﹫150承台箍筋:10﹫200mm保护层厚度:25mm3. 桩参数:桩型:泥浆护壁钻(冲)孔灌注桩桩间距:a=1.7m桩直径:0.8m桩混凝土强度:C30桩身配筋:1216保护层厚度:100mm桩入土深度:38.26m4. 荷载参数:钢筋自重 1kN/m3;混凝土自重 24kN/m3;5. 地质参数:序号土名称土厚度(m) 土侧阻力特征值(kPa) 土端阻力特征值(kPa)1 3淤泥 5.16 6 02 4-2粉质粘土夹粉土 3.8 18 03 6粘土 13.7 30 04 7粉质粘土 6.2 25 05 7-夹含砾粉砂 5.3 32 06 8-1粉砂 1.3 31 07 8-2圆砾 1.6 55 08 10-1全风化粉砂质泥岩 1.2 42 09 10-3中风化粉砂质泥岩 1 0.9 14006. 塔吊计算简图二.工作状态时验算1. 塔吊承台设计验算1) 承台截面主筋验算A. 矩形承台弯矩的计算(依据《建筑桩基技术规范》JGJ94-94)ii x y N m ∑=11 II y X N m ∑=11其 中恒载分项系数取1.2,活载分项系数取1.4;Mx1,My1---计算截面处XY 方向的弯矩设计值(KN.m ); xi,yi----单桩相对承台中心轴的XY 方向距离(m ); Ni1-----扣除承台自重的单桩桩顶竖向力设计值(KN)。
N=1.2×663.4/4+(1.4×1286.59+1.4×38.36×1.25)×(1.7/2)/[4×(1.7/2)2]=748.54kN经计算得到弯矩设计值:Mx1=My1=2×748.54×(1.7/2-1.7/2)=0kN.mB. 承台截面主筋的计算a 依据《混凝土结构设计规范》(GB50010-2002)受弯构件承载力计算。
塔吊受力验算

塔吊受力验算Document number:NOCG-YUNOO-BUYTT-UU986-1986UT2、计算.支座力计算选取2#塔吊作为验算标准,2#塔吊距离建筑物米最大其中重量6t,最大工作幅度50m,最终高度118米,第一道附着位于第7层标高,第二道附着位于第13层标高43m,第三道附着位于第19层标高,第四道附着位于第25层标高76m,第五道附着位于第92层标高92m。
塔机在工作现场架设附着后,塔机产生出的各种主要荷载,基本出现在最上一道附着上部的塔身悬出部分。
因此,这种连续梁的竖直多跨静定支撑,向上伸展中,每加一道附着支承时,只要校核这最上面的一道附着支撑是稳定,无疑下面的支撑也是稳定的,则整体塔身附着也是稳定的。
因此以此道附着杆的负荷作为设计或校核附着杆截面的依据。
附着式塔机的塔身可以简化为一个带悬臂的刚性支撑连续梁,其内力及支座反力计算如下:风荷载标准值应按照以下公式计算:ωk =ω×μz×μs×βz= ××× = kN/m2;其中ω0──基本风压(kN/m2),按照《建筑结构荷载规范》(GBJ9)的规定采用:ω= kN/m2;μz──风压高度变化系数,按照《建筑结构荷载规范》(GBJ9)的规定采用:μz= ;μs ──风荷载体型系数:μs= ;βz ──高度Z处的风振系数,βz= ;风荷载的水平作用力:q = Wk ×B×Ks= ×× = kN/m;其中 W k──风荷载水平压力,W k= kN/m2; B──塔吊作用宽度,B= m;Ks ──迎风面积折减系数,Ks= ;实际取风荷载的水平作用力 q = kN/m;塔吊的最大倾覆力矩:M = kN·m;计算结果: N w = ;附着杆内力计算计算简图:计算参量b1=,a1=,a2=,T1=T3=,T2=T1cosα1-T2cosα2-T3cosα3=-NwcosθΣFy=0T 1sinα1+T2sinα2+T3sinα3=-NwsinθΣM0=0T 1[(b1+c/2)cosα1-(α1+c/2)sinα1]+T2[-(b1+c/2)cosα2+(α2-α1-c/2)sinα2]+T3[-(b1+c/2)cosα3+(α2-α1-c/2)sinα3]=Mw其中:α1=arctan[b1/a1] α2=arctan[b1/(a2-a1)] α3=arctan[b1/(a2- a1-c)]第一种工况的计算:塔机满载工作,风向垂直于起重臂,考虑塔身在最上层截面的回转惯性力产生的扭矩和风荷载扭矩。
附录3:塔式起重机分解
附录三: 塔式起重机一、塔式起重机的分类塔式起重机可按以下几种方式进行分类:(一)按支承方式分为移动式塔式起重机和固定式起重机,如图3-1。
移动式塔式起重机根据行走装置的不同又可分为轨道式(习惯称行走式塔式起重机,如图3-2所示)、轮胎式、汽车式、履带式四种。
轨道式塔式起重机塔身固定于行走底架上,可在专设的轨道上运行,稳定性好,能带负荷行走,工作效率高,因而广泛应用于建筑安装工程。
固定式塔式起重机可分为独立固定式、附着自升式和内爬式三种。
独立固定式又可分为支腿固定式和底架固定式,如图3-3所示。
附着自升塔式起重机能随建筑物升高而升高,适用于高层建筑,建筑结构仅承受由起重机传来的水平载荷,附着方便,但占用结构用钢多,如图3-4(b )所示;内爬式起重机在建筑物内部(电梯井、楼梯间),借助一套托架和提升系统进行爬升,顶升较繁琐,但占用结构用钢少,不需要装设基础,全部自重及载荷均由建筑物承受,如图3-4(a )所示。
内爬式起重机在电力建设中很少使用图3-1 塔式起重机按支承方式分类 移动式塔式起重机 轨道式 轮胎式 汽车式 履带式 固定式塔式起重机 附着自升式 内爬式 塔式起重机 独立固定式 支腿固定式 底架固定式图3-2行走式塔式起重机(a)(b)图3-3固定式塔式起重机(a)支腿固定式;(b)底架固定式(a)(b)图3-4 塔式起重机的附着型式(a)内爬式;(b)附着自升式(二)按变幅方式分为动臂变幅塔式起重机和小车变幅塔式起重机,如图3-5。
动臂变幅塔式起重机是靠起重臂俯仰来实现变幅的,如图3-6所示。
其优点是:能充分发挥塔机的有效高度,机构简单,刚度大,易于实现大型化;缺点是最小幅度被限制,不能完全靠近塔身。
小车变幅塔式起重机是靠水平起重臂轨道上安装的小车行走实现变幅的,又可分为定长臂式、伸缩臂式和折臂式,分别见图3-7 (b )、(a )、(c )。
其优点是:变幅范围大,载重小车可驶近塔身;缺点是:起重臂受力情况复杂,对结构要求高,且起重臂和小车必须处于建筑物上部一定有效高度,塔顶安装高度比建筑物屋面要高出15-20米,甚至更高。
塔吊的塔身结构分类,各塔身结构的特点及应用

金属结构是塔吊的重要组成部分,金属结构自重占塔吊整机总重量的一半以上,合理设计塔吊金属结构,对塔吊减轻自重、提高塔吊性能有非常重要的意义。
塔身结构按构造可分为格构式和实腹式两种;按受力特点分为以承受轴向力为主的旋转塔身和受压弯扭转作用的不旋转塔身。
无论设计哪种型式的塔身,都必须计算其强度、刚度和稳定性等。
目前应用较多的是格构式,其计算可以采用平面静力方法或空间杆系有限元方法来完成。
以最大起重量20t、最大工作幅度70m、臂端最大起重量5t 的塔吊塔身设计为例,分别采用平面分析方法和有限元分析方法进行设计分析、比较两种设计方法的不同和有限元分析法的优越性。
1. 塔身设计思路
无论是采用平面静力分析的方法,还是采用空间杆系有限元分析方法进行设计计算,都要考虑塔身结构的确定和塔身受力分析这两个难题。
首先对塔身结构进行分析,塔身的结构设计与塔吊的类型和所采用的顶升方式有关,同时还要考虑塔身结构中是否有基础节、加重节、加强节或过渡节。
其次是塔身的受力分析,塔身受力分工作和非工作两种状态。
塔身上的载荷有:塔身自重,上部臂架和平衡臂上的各种载荷对塔身产生的作用力;塔吊运行、回转机构起制动。
塔吊受力分析

建筑力学受力分析报告专业:建筑工程技术班级:技术6姓名:******学号:******塔吊的基本组成:塔机的金属结构是构成塔吊的重要部分。
常见的金属结构是起重臂、塔身、转台、承座、平衡臂、底架、塔尖等组成。
塔吊的示意图:塔吊的作用:塔吊主要用于建房时吊装各种材料,如模板、钢筋;也可以用于装卸。
塔吊的结构图:塔吊的受力分析:塔吊的静力学分析先考虑满载时的情形,对塔吊整体为研究对象.要保证机身满载是平衡而不向右倾倒,则必须∑M B=0, W2(a+b)-F A b-W1-W max l max=0;限制条件F A≥0.再考虑空载时的情形,这时W=0. 要保证机身空载时平衡而不向左倾倒,则必须满足平衡方程:∑MA=0, W2 a+FBb-W1(b+e)=0; F1限制条件FB≥0.F x对图2-2塔吊的平衡臂,由平衡 l2条件得:m1g Fy∑Fx=0, F1cosθ=Fx; l1∑Fy=0, F1sinθ+Fy=W2+m1g;W2∑M=0, (F1sinθ-W2)l1=m1gl2;塔吊平衡臂受力情况运动力学分析:塔吊的运动学模型图所示,塔吊的运动情况有几个分运动组成。
以下进行详细分析说明。
Ⅰ:重物分运动的情况:①重物在塔吊吊索的提升下在竖直方向向上或向下平动;②重物在变幅小车的作用下沿水平方向向左或向右平动;③在旋转机构的作用下塔吊吊臂在水平面内转动,从而带动重物在水平面上转动。
Ⅱ:在三维空间坐标系下,重物相对于固定参考系的运动情况:z以地面作为固定参考系,连体基建立在塔吊吊臂上。
当重物同时参与三个分运动时,则重物的绝对运动是重物三y个分运动的合运动,这种运动有点复杂,且不容易进行操控。
一般情况下塔吊在工作时,不同时参与三个分运动,基本上是O x一个或两个运动的合成,这样容易操控,且不容易出现危险。
Ⅲ:重物运动时的速度分析:在塔吊工作时,重物一般情况下都应该是匀速运动,则根据速度合成法重物的绝对速度就等于两个平动速度和一个转动速度的合速度。
塔吊的受力资料分解

塔吊分析报告——理论力学车辆工程(3)班李晓学号:********程驰学号:********乔同超学号:********张兴华学号:********总述1.塔吊综述1.1塔吊外型1.2塔吊的组成1.3我国塔吊发展历程1.4塔吊的作用1.5塔吊结构图1.6塔吊的分类示例2.塔吊分析2.1塔吊静力学分析2.2塔吊运动学分析2.3塔吊动力学分析3. 塔吊常见事故分析及对策3.1 塔吊重大事故分析3.2 对策4. 塔吊现存问题及发展前景4.1 我国塔式起重机存在的主要问题4.2 塔吊的未来发展前景5. 小组总结★1.塔吊综述1.1塔吊外型塔吊,即塔式起重机(如图1-1所示),机身很高,像塔,有长臂,轨道上有小车,可以在轨道上移动,工作面很大,主要用于建筑工地等处。
1.2塔吊的组成塔吊一般由外套架、回转轴承、塔冒、平衡臂、平衡臂拉杆、起重臂(吊臂)、起重臂拉杆、电源、支架、变幅小车,起重吊钩、驾驶室等几部分组成。
另外工作时塔机安全装置还应主要包括:行程限位器和荷载限制器。
行程限位器有:起升高度限位器、回转限位器、幅度限位器。
荷载限制器有:起重力矩限制器、起重量限制器此外还应包括风速仪。
1.3我国塔吊发展历程塔式起重机是我们机械建筑的关键设备,在建筑施工中起着重要作用,图1-1 塔吊实物图我国的塔吊制造如今已跻身于当代国际市场。
五十年代初,我国塔机的制开始起步,生产的是一些小型塔机,六十年代自行设计制造了25TM、40TM、60TM、160TM四种机型,多以摆臂为主;七十年代,随着高层建筑发展,对施工机械提出了新的要求。
于是,160TM附着式、45TM内爬式、120TM自升式等都由我国自己设计并制造;八十年代,国家建设突飞猛进,建筑用最大的250TM塔机也应运而生。
特别是1984年,首先在北京建工集团建机厂引进世界先进的法国POTAIN(波坦)公司技术并于次年成功试制了FO/23B塔机,这可以说是我国塔机发展史的里程碑,它大大缩短了我国与国外的差距,使我国塔机发展步入快行道。
塔吊性能表

目录设备型号众多,恕不一一列举,时间仓促,如有疏漏之处望告知,以便改正,在此谢过,‘助’贵公司,业绩蒸蒸日上,财源广进,北京中建正和建筑机械施工有限公司――项目管理部M1280D内爬式受力:臂长米时最大垂直力为445吨,最大水平力为136吨;臂长米时最大垂直力为442吨,最大水平力为161吨;固定式受力:臂长米时基础受力M=28877吨米;自重V=445吨,剪力S=48吨,压力T=619吨,拉力U=398吨臂长米时基础受力M=28877吨米;自重V=442吨,剪力S=48吨,压力T=619吨,拉力U=398吨M1280单绳吊重表:臂长幅度10 20 30 40 50 60 65 70 75 80 最大半径吊重最小半径°°°°°°°°°°°米吨8.2m 50t 50 50 13最小半径°°°°°°°°°米吨7.4m 50t 50 50 50 50最小半径°°°°°°°米吨6.7m 50t 50 50 50 50最小半径°°°°°°米吨6.0m 50t 50 50 50 50最小半径°°°°°米吨5.3m 50t 50 50 50 50最小半径°°°°米吨4.5m 50t 50 50 50 50 M1280双绳吊重表:臂长幅度10 20 30 40 50 60 65 70 75 80 最大半径吊重7.9m~27.5m °°°°°°°°°°米吨50t 50 50 137.9m~27.5m °°°°°°°°米吨80t 80 80 726.5m~24.5m °°°°°°米吨100t 100 100 795.8m~24.7m °°°°°米吨100t 100 1005.1m~24.9m °°°°米吨100t 100 100 574.3m~25.0m °°°米吨100t 100 100M1280D塔吊主要结构件重量表名称数量高(长)度(m)单件重量(Kg)起重臂 1 72 34000爬升节 1 4 22000标准节12 11 7000平衡臂 1 14535下回转 1 13000上回转 1 21000A架 1 20000 发动机组及卷扬机组1 14000 机械平台 1 12000 加强节2 4 9000 操作室 1 1600 主卷扬筒及钢索 1 23000 塔吊机构参数:回转机构:0~M600D受力情况:固定式(无附着塔身重量及基础受力)No Climbing Frame (没有爬升框)Internal ClimbingFrame(爬升框在内部)External ClimbingFrame(爬升框在外部)Units(单位)Tower 441 442 392 441 442 392 441 442 392H 36 48 36 36 44 36 32 44 36 (m)M 884 1031 886 884 947 886 883 1099 920 (mT) V 174 190 176 189 201 191 185 201 191 (T) S 24 29 24 24 28 24 28 33 29 (T) T 304 344 344 308 329 348 306 367 359U 217 263 256 213 229 252 214 281 264 (T)内爬式Tower Types (塔吊种类) 391 392 441 442 Units(单位) G 两个爬升框最小距离12 12 12 12 (m)J 最后一个附着上的最大距离16 24 24 32 (m)K 最大水平载荷67 72 72 77 (T)L 总体垂直载荷180 191 189 201 (T)H 最大自由高度28 36 36 44 (m)M600D塔吊起重性能表臂长最小幅度50t最大幅度(m) (m) 50T (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) ____M600D塔吊主要结构件重量表名称数量高(长)度(m)单件重量(Kg)备注起重臂15515000 含滑轮组,拉索等12500 不含变幅滑轮组,拉索等爬升节 1 4 15000 含油缸等标准节12 4 5000下回转 1 13000 含回转齿圈上回转 1 11000A架 1 12000主卷扬筒及钢索 1 11000机械平台 1 10000加强节 1 4 6500操作室 1 1200发动机及卷扬机组11000塔吊机构参数:回转机构:0~行走机构:18m/minM440D固定式(无附着塔身重量及基础受力)No Climbing Frame (没有爬升框)Internal ClimbingFrame(爬升框在内部)External ClimbingFrame(爬升框在外部)Units(单位)Tower 441 442 392 441 442 392 441 442 392H 40 48 40 40 48 40 36 44 36 (m)M 885 1122 877 885 1122 877 930 1191 923 (mT) V 176 188 178 191 203 193 187 199 189 (T) S 26 29 25 26 29 25 29 33 29 (T) T 301 369 341 305 373 345 312 392 351U 225 292 261 222 288 257 236 310 273 (T)内爬式Tower Types (塔吊种类) 391 392 441 442 Units(单位)G 两个爬升框最小距离12 12 12 (m) J 最后一个附着上的最大距离28 28 36 (m) K 最大水平载荷98 71 71 90 (T)L 总体垂直载荷156 193 191 203 (T) H 最大自由高度44 40 40 48 (m) M440D塔吊起重性能表臂长最小幅度50吨吊重最大幅度(m) (m) 50T (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m) (m)6 - 25 15- 23 20- 3255 - 44 41 12 1012 50 42 2313 5050 1950 2432 50塔吊机构参数:回转机构:0~行走机构:18m/minM125/75塔身截面:4×4米底架:10×10米(行走式)塔身节主要构件重量:固定脚(预埋节)米(吨X4)标准节米(吨)加强节:米(吨)过渡节:6米(吨)平衡臂:24米(吨)套架总成(吨)回转总成(吨)塔头(吨)最大自由高度基础受力(吨):P=起重性能:双小车:臂长幅度5~ 25 30 35 40 45 50 55 60 65 7070 Ⅷ吊重50幅度5~ 40 45 50 55 60 65 70 Ⅳ吊重2560幅度5~ 25 30 35 40 45 50 55 60 Ⅷ吊重50幅度5~ 40 45 50 55 60Ⅳ吊重25单小车:70 幅度5~ 25 30 35 40 45 50 55 60 65 70Ⅳ吊重50幅度5~ 40 45 50 55 60 65 70Ⅱ吊重2560幅度5~ 25 30 35 40 45 50 55 60 Ⅳ吊重50幅度5~ 40 45 50 55 60Ⅱ吊重25 23自由高度:固定式:满顶15节标准节,钩高米。
起重臂受力分析

1#打印字体大小: t T发表于 2010-7-2 10:25|新手如何挣论坛积分,提高权限 | 只看该作者[分享] 塔机起重臂弯折事故力学分析塔机起重臂弯折事故力学分析作者:浙江广厦建设集团谢建民章旭江王彦理摘要:详细介绍塔吊起重臂折断原因,进行各种工况下力学分析,并阐述节点焊缝失效造成后果,从而得出可靠结论,提出预防事故发生措施。
关键词:塔吊起重臂钢桁架焊缝高层建筑施工,塔吊是竖向运输主要机具,但塔吊使用中经常发生重大安全事故,为此建设部曾多次下文。
文献[1]论述塔吊起重臂弯折事故,发生事故原因是塔吊起重臂中腹杆焊接存在缺陷,导致腹杆失去承载能力,致使起重臂弯折。
这类事故曾发生过多起,对这类事故分析,具有普遍指导意义。
本文从钢结构和结构力学观点出发,分析塔吊某一腹杆失去支承能力后,引发起重臂其他腹杆内力变化,说明起重臂弯折的必然原因。
1 事故概况根据文献介绍,2004年5月25日,河北省石家庄某公司住宅楼的施工现场,突然一声巨响,一台QT25E塔机起重臂弯折,发生一起较严重的事故。
当时司机正在该机驾驶室内操作,准备把一个重量小于0.8t的灰斗放至地面,突然发生了上述事故。
根据事故现场调查,弯折处起重臂弦杆与一根腹杆的连接焊缝已脱开,目测该处焊缝有陈旧性裂纹。
在吊臂弯折处附近,焊缝脱开的腹杆没有弯曲,其他8根腹杆都在接近中点处弯折。
2 事故原因分析2.1 焊接原因分析从焊接破坏腹杆取样发现,金相组织在焊区发现有孔洞,并发现多处从焊区表面伸入基体的沿晶裂纹,裂纹起始部位在焊缝与热影响区交界处。
通过扫描电镜观察,从断口上可以明显看出疲劳裂纹扩展区,裂源在弦杆与腹杆的焊缝边缘,这说明存在焊接缺陷。
8根腹杆都在接近中点处弯折,这是腹杆内力突然增大和失稳的表现,说明焊缝脱开失去承载能力之后,在起吊载荷作用下,引起吊臂各杆内力突然增大和重新分布致使受压的腹杆因超载而失稳,这些腹杆失稳弯折后,起重臂截面高度减小,使该段吊臂失去承载能力而弯曲。
塔吊受力原理

塔吊受力原理
塔吊受力原理主要涉及到力学和结构力学的知识。
塔吊是一种用于起重和搬运重物的机械设备,其主要受力部分包括塔身、臂架、起重机构和配重块等。
塔吊的受力原理可以简单地概括为:塔身承受垂直荷载和水平荷载,臂架承受起重物的重量和惯性力,起重机构承受起重物的重量和惯性力,配重块用于平衡塔吊的重心和提高稳定性。
具体来说,塔身是塔吊的支撑结构,其主要承受垂直荷载和水平荷载。
垂直荷载是指塔吊自身重量和配重块的重量,水平荷载是指风荷载和操作荷载等。
塔身的设计要考虑到这些荷载的作用,以保证塔身的稳定性和安全性。
臂架是塔吊的工作部分,其主要承受起重物的重量和惯性力。
起重机构是连接臂架和起重物的部分,其主要承受起重物的重量和惯性力。
惯性力是指起重物在运动过程中产生的惯性力,需要通过起重机构传递到臂架和塔身上。
配重块用于平衡塔吊的重心和提高稳定性。
配重块的重量和位置需要根据塔吊的工作条件和要求进行设计和调整,以保证塔吊的稳定性和安全性。
总之,塔吊的受力原理是一个复杂的系统工程,需要考虑到多种因素的影响,以保证塔吊的稳定性和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
塔吊分析报告——理论力学车辆工程(3)班李晓学号:20052654程驰学号:20052735乔同超学号:20052682张兴华学号:20052660总述1.塔吊综述1.1塔吊外型1.2塔吊的组成1.3我国塔吊发展历程1.4塔吊的作用1.5塔吊结构图1.6塔吊的分类示例2.塔吊分析2.1塔吊静力学分析2.2塔吊运动学分析2.3塔吊动力学分析3. 塔吊常见事故分析及对策3.1 塔吊重大事故分析3.2 对策4. 塔吊现存问题及发展前景4.1 我国塔式起重机存在的主要问题4.2 塔吊的未来发展前景5. 小组总结★1.塔吊综述1.1塔吊外型塔吊,即塔式起重机(如图1-1所示),机身很高,像塔,有长臂,轨道上有小车,可以在轨道上移动,工作面很大,主要用于建筑工地等处。
1.2塔吊的组成塔吊一般由外套架、回转轴承、塔冒、平衡臂、平衡臂拉杆、起重臂(吊臂)、起重臂拉杆、电源、支架、变幅小车,起重吊钩、驾驶室等几部分组成。
另外工作时塔机安全装置还应主要包括:行程限位器和荷载限制器。
行程限位器有:起升高度限位器、回转限位器、幅度限位器。
荷载限制器有:起重力矩限制器、起重量限制器此外还应包括风速仪。
1.3我国塔吊发展历程塔式起重机是我们机械建筑的关键设备,在建筑施工中起着重要作用,图1-1 塔吊实物图我国的塔吊制造如今已跻身于当代国际市场。
五十年代初,我国塔机的制开始起步,生产的是一些小型塔机,六十年代自行设计制造了25TM、40TM、60TM、160TM四种机型,多以摆臂为主;七十年代,随着高层建筑发展,对施工机械提出了新的要求。
于是,160TM附着式、45TM内爬式、120TM自升式等都由我国自己设计并制造;八十年代,国家建设突飞猛进,建筑用最大的250TM塔机也应运而生。
特别是1984年,首先在北京建工集团建机厂引进世界先进的法国POTAIN (波坦)公司技术并于次年成功试制了FO/23B塔机,这可以说是我国塔机发展史的里程碑,它大大缩短了我国与国外的差距,使我国塔机发展步入快行道。
通过消化、吸收国外先进技术,我国自行研制的QTZ80、QTZ120两种机型已达到国外八十年代同类产品的水平;进入九十年代,现代化进程不断地加快,国内外市场对塔机的要求越来越高,众多城市大型建筑、水利、电力、桥梁等工程不断增加,市场的要求加快了新产品开发的力度,先后有400TM、900TM水平臂和300TM动臂式塔机,主要性能达到了国外九十年代水平,这一系列的塔机的开发不但填补了国内空白,而且替代和减少了大型塔机的进口数量。
回顾50年发展史,我国塔机行业从无到有,从小到大,逐步形成了较为完整的体系,我国增幅最快的新兴行业之一,特别是改革开放以来,塔机行业在设计、制造、管理和市场开拓等方面已形成一套较为健全的机制,以目前我国300余家生产塔机厂家为计,取得生产许可证的达100余家,近几年,塔机产量高升不下,2001年产量9309台,2002年10580台,今年市场需求量在20000台,就总体而言,我国已成为世界民用塔机的生产大国,也是世界塔机主要需求市场之一。
1.4塔吊的作用塔吊一般用于建筑施工、货物搬运、部分事故现场处理等场合,主要作为材料、货物等的高空运输或质量较大物体的运送的工具。
1.5塔吊结构图根据塔吊的组成、用处及发展历程,我们可以对塔吊的结构有一个更加深入的了解。
如下图1-2塔吊的主体结构模型图所示,塔吊的各个部分均已经标出在图上。
图1-2 塔吊主体结构模型1.6塔吊的分类示例实际工作中的塔吊多种多样,现略仅举几例以示说明。
图1-3QTZ31.52系列塔吊图1-4QTZ40、100系列塔吊★2.塔吊分析2.1塔吊静力学分析:OW2W1WbF a F b图2-1 塔吊静力学模型如右图为塔式起重机受力分析图,各种参数均已在图中标出,对此进行受力分析。
对图2-1先考虑满载时的情形,对塔吊整体为研究对象.要保证机身满载是平衡而不向右倾倒,则必须∑M B=0, W2(a+b)-F A b-W1-W max l max=0;限制条件F A≥0.再考虑空载时的情形,这时W=0. 要保证机身空载时平衡而不向左倾倒,则必须满足平衡方程:∑M A=0, W2 a+F B b-W1限制条件F B≥0.对图2-2塔吊的平衡臂,由平衡条件得:∑F x=0, F1cosθ=F x;∑F y=0, F1sinθ+F y=W2+m1g; W2 ∑M=0, (F1sinθ-W2)l1=m1gl2;图2-2塔吊平衡臂受力情况图2-3 塔吊吊臂受力情况 图2-4 塔吊塔帽与拉杆的受力情况Ⅳ: 如图2-3塔吊吊臂,由平衡条件得:∑Fx=0, F x =F 2cos α F 2 F 3+F 3cos β; F X∑F y =0, F 2sin α+ F `y l 3F 2sin β+F `y =m 2g+W ; l 5 m 2g ∑M=0, F 2sin αl 3+ l WF 3sin βl 4=m 2gl 5+Wl . l 4yⅤ:如图2-4塔吊吊帽与拉杆的受力 o情况,则由共点力的平衡条件可得 x 平衡方程如下:F 1 F F 2 F 3∑Fx=0, F 1cos α=F 2cos β+ F 3cos γ∑F y =0, F 1sin α+F 2sin β+ F 3sin γ=FF风力V2/a2MV1/a1FMg2.2塔吊运动学分析:★:如上图2-5塔吊的运动学模型图所示,塔吊的运动情况有几个分运动组成。
以下进行详细分析说明。
Ⅰ:重物分运动的情况:① 重物在塔吊吊索的提升下在竖直方向向上或向下平动; ② 重物在变幅小车的作用下沿水平方向向左或向右平动; ③ 在旋转机构的作用下塔吊吊臂在水平面内转动,从而 带动重物在水平面上转动。
Ⅱ:在三维空间坐标系下,重物相对于固定参考系的运动情况:z以地面作为固定参考系,连体基建立在塔吊吊臂上。
当重物同时参与三个分运动时,则重物的绝对运动是重物三 y个分运动的合运动,这种运动有点复杂,且不容易进行操控。
一般情况下塔吊在工作时,不同时参与三个分运动,基本上是x 一个或两个运动的合成,这样容易操控,且不容易出现危险。
O Ⅲ:重物运动时的速度分析:在塔吊工作时,重物一般情况下都应该是匀速运动,则根据速 度合成法重物的绝对速度就等于两个平动速度和一个转动速度的合 速度。
当有加速度时,同样根据 加速度合成法重物的绝对加速度就 等于两个平动加速度和一个转动加速度的合加速度。
Ⅳ:重物运动情况详细描述:★:重物在实现从一个地点到另一个地点的运动时,大致可以分为三种运动情况,先对其进行详细说明。
① 首先,重物在塔吊吊索的提升下竖直上升运动,先匀加速,后匀速,再匀减速,当到达所需高度时,重物停止上升;其次,变幅小车沿吊臂运动,带动小车平动,当到达所需位置时,重物停止平动;再次,吊臂在旋转装置的作用下旋转,带动重物旋转到所需位置的正上方,停止旋转;最后,吊索带着重物下降到所需地点。
图2-5 塔吊的运动学及动力学模型图2-6这种重物转移方式是最简单的方式,既容易操作,又很安全,但是有一点不好就是很费时间。
如下图2-7所示:该图表示的是这种运动情况下重物的运动路径。
zyxO图2-7②首先,重物在塔吊吊索的提升下竖直上升运动,先匀加速,后匀速,再匀减速,当到达所需高度时,重物停止上升;其次,变幅小车沿吊臂运动,带动小车平动,同时,吊臂在旋转装置的作用下旋转,带动重物旋转,直到将重物移动到所需要的位置的正上方为止。
最后,吊索带着重物下降到所需地点。
这种重物转移方式是有点相对复杂的方式,操作相对容易,也很安全,并且也很节约时间,使一种比较好的操作方式。
但是变幅小车和吊臂在同时运动时,应当尽量匀速,且速度不要太大,加速度要很小,防止产生过大的惯性力,造成危险事故。
如下图2-8所示:该图为变幅小车和吊臂在同时运动时重物运动的速度情况V=Ve+VrzyωVeO Vr x图2-8如下图2-9所示:该图为变幅小车和吊臂在同时运动时重物运动的加速度情况a=a e+a r+a czya e ωO a r xa c图2-9③重物在塔吊吊索的提升下竖直上升运动,同时,变幅小车沿吊臂运动,带动小车平动,吊臂在旋转装置的作用下旋转,带动重物旋转,直到将重物移动到所需要的位置的正上方为止。
然后,吊索带着重物下降到所需地点。
这种重物转移方式很复杂,虽然很节约时间,但操作很困难,且对操作人员的技术要求相当高。
另外这种转运方式也不很安全,容易出现事故,是一种不太好的操作方式,塔吊工作时应当尽量避免这种操作,防止产生危险事故。
如下图2-10、2-11所示:该图为重物、变幅小车和吊臂在同时运动时重物运动的速度和加速度情况zzy y a1v222 ω ωa3 xO v1 v3 x O a2 a42.3塔吊动力学分析:★:如上图2-5所示为塔式起重机的动力学模型图,塔吊所受各种动力及运动的情况均已在图中标出,现对此进行动力学分析。
Ⅰ:动力情况:①塔吊受到动力装置提供的动力矩M 的作用。
②重物自身受重力Mg 作用。
③塔吊工作时还要考虑风力的作用,即受F 风力的作用。
④重物受到吊索提升的力F 的作用。
Ⅱ:动力分析:① 变幅小车带动重物以速度V 0水平匀速运动,由于突然刹车,重物会因惯性绕O 点向前摆动,这时会产生很 O 大的惯性力。
F变幅小车刹车后,取自然坐标系如右图2-12所示, 列运动微分方程: Fmg dv/dt=-mg sin θ ① θ mg v/l=F-mg cos θ ②由式②得:F =mg (cos θ+v /gl)其中v 及cos θ均为变量。
由式①知重物做减速运动,故可判断出在初始位置θ=0时吊索的拉力最大,最大为: V 0 F max=mg (1+v 0 /gl) mg mg考虑到刹车前吊索拉力即为静拉力F 0=mg ,于是动荷因数图2-10 图2-11图2-122Kd=F max/ F0=1+v0 /gl可见,为了避免吊索产生过大的附加动拉力,变幅小车的行走速度不能太大,应力求平稳;在不影响塔吊工作安全的条件下,吊索尽量长些,以减小动荷因数。
②如图2-13所示重物在吊索的提升力F的提升下加速向上运动F=mg(1+a/g)可见在一般情况下,吊索动拉力由两部分组成,一部分是提升重物的静拉力,另一部分是由于加速度而引起的附加动拉力。
F以Kd表示动荷因数,则:a Kd=1+a/g它表示重物加速运动时动拉力与静拉力之比值。
如果加速度越大,则动荷因数越大,吊索拉力就越大,因此在设计和使用塔吊时应注意动荷因数的影响。
图2-13mg③如下图2-14所示,重物在吊索的提升下随吊臂的旋转而做旋转运动。
ωθFω图2-142V mg当重物随吊臂以ω旋转时,要产生摆角θ来使F 与mg 的合力为重物的旋转提供向心力,由此可知:F=mg tan θ=ml sin θ ω则当吊臂旋转时,应该使角速度尽量的小,尽可能没有角加速度,以防止重物旋转时产生过大的向心力,对塔吊整体施加过大的惯性力和惯性力矩,从而降低工作危险。