基于输出反馈的区域极点配置
7.4 状态反馈和极点配置
可配置条件_极点配置定理
考虑线性定常系统
x Ax Bu
假设控制输入u的幅值是无约束的。如果选取控制规律为
u r Kx
式中K为线性状态反馈矩阵。
定理 (极点配置定理) 线性定常系统可通过线性状态反馈任意地 配置其全部极点的充要条件是,此被控系统状态完全可控。
该定理对多变量系统也成立。
证明 (对单输入单输出系统) 1、充分性 2、必要性
kn 1 ]
由于 u r Kx r KPx ,此时该系统的状态方程为 x ( Ac Bc K ) x Bcr
相应的特征方程为 sI Ac BcK 0
因为非奇异线性变换不改变系统的特征值,当利用 u=r-Kx作为控制输 入时,相应的特征方程与上式相同,均有如下结果。
s
1
0
0
s
0
sI Ac BcK
◆确定将系统状态方程变换为可控标准形的变换矩阵P。若给定的状态方程已是 可控标准形,则P = I。此时无需再写出系统的可控标准形状态方程。非奇异线 性变换矩阵P=QW。
◆利用给定的期望闭环极点,可写出期望的特征多项式为
(s 1() s 2 ) (s n ) sn an1sn1 a1s a0
从而确定出a1* , a2 *,… an *的值。
◆最后得到状态反馈增益矩阵K为
K [ a0 a0 a1 a1
a n1
an1
]
P 1
10
极点配置 例1
【例】 考虑如下线性定常系统
0
1
0
0
x Ax Bu A 0
0
1 , B 0
1 5 6
1
利用状态反馈控制,希望该系统的闭环极点为s = -2±j4和s = -10。试确定状
输出反馈
C H
T
T
(5-15)
(5-15)是一个q个未知量,n个方程的方程组,而 是 任意的n维向量,它由所期望的极点所决定。
方程(5-15)对任意的 有解,显然要求 C 是n×n可逆方阵。
一般来说当q<n 时,对于任意 ,(5-15)无解。
对于给定的 ,方程(5-15)有解的条件是它们 相容,亦即当C的秩为q时,q个方程的唯一解应满足 剩下的n-q个方程。这时,这n-q个等式给出了加在
用静态输出反馈配置极点 首先研究单输入多输出的系统,以说明用静态 输出反馈配置极点时所遇到的困难,而这些困难是 用全部状态变量作反馈时所未遇到的。一个单输入 多输出系统动态方程为
Ax bu x y Cx
(5-11)
(5-12)
u=Hy+v
联合(5-11)和(5-12)可得闭环系统的动态方程为
i
i , i 0 使得扰动后的S非奇异,由于 C 的秩为q,
这总是可以做到的。式(5-17)给出了H的一个明显 表达式,并且 i H i 是给定的 1 , 2 ,, q 的函数, i S非奇异,则可精确地使闭环 如果所给的 能使
全维状态观测器及其设计
状态观测器 状态估计器 状态重构
^
2n阶复合系统:
. x . A ^ L HC x
y C
Bk x B ^ v A Bk HC L x B
x 0 ^ x
ˆ x x ( A Hc )( x x ) L 由(1)-(2):
3. 分离定理: . cx 原系统 x Ax Bu y ^ 引入状态反馈: u v k x
x Ax Bk x Bv, y cx . ^ ^ ^ 全维观测器:
线性系统的状态反馈及极点配置

现代控制理论实验(一)线性系统的状态反馈及极点配置——09级自动化本科一.实验目的1.了解和掌握状态反馈及极点配置的原理。
2.了解和掌握利用矩阵法及传递函数法计算状态反馈及极点配置的原理与方法。
3.掌握在被控系统中如何进行状态反馈及极点配置,构建一个性能满足指标要求的新系统的方法。
二.实验原理及说明一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说,当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。
因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
若有被控系统如图3-3-61所示,它是一个Ⅰ型二阶闭环系统。
图3-3-61 被控系统如图3-3-61所示的被控系统的传递函数为:12021S 11)1(1)(a S a S b T TS T TS S T S i i i ++=++=++=φ (3-3-51) 采用零极点表达式为:))(()(210λλφ--=S S b S (3-3-52)进行状态反馈后,如图3-3-62所示,图中“输入增益阵”L 是用来满足静态要求。
图3-3-62 状态反馈后被控系统设状态反馈后零极点表达式为:))(()(21**--=λλφS S b S (3-3-53)1.矩阵法计算状态反馈及极点配置1)被控系统被控系统状态系统变量图见图3-3-63。
图3-3-63 被控系统状态系统变量状态反馈后的被控系统状态系统变量图见图3-3-64。
图3-3-64 状态反馈后的被控系统状态系统变量图图3-3-61的被控系统的状态方程和输出方程为:状态方程:⎪⎪⎪⎩⎪⎪⎪⎨⎧=+-=+-=••1i 1i 2211X Y u T 1X T 1X X T 1X T 1X (3-3-54)⎪⎩⎪⎨⎧=+==•∑CxY u Ax X B C B A 0),,(式中[]01,T 10B 0T 1T 1T 1A ,i i 21=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=C x x x , 被控系统的特征多项式和传递函数分别为:12010a a b S b )(+++=S S S φB A)C(SI 1--=)(A -SI det a a )(f 0120=++=S S S 可通过如下变换(设P 为能控标准型变换矩阵): —x P X =将∑0C B A ),,(化为能控标准型 ),,(————C B A ∑,即: ⎪⎩⎪⎨⎧=+=•——————x C Y u x A B X 式中 ⎥⎦⎤⎢⎣⎡-==-101a -a 10AP P A — , ⎥⎦⎤⎢⎣⎡==-10B P B 1— , []10b b CP C ==— 2)被控系统针对能控标准型),,(————C B A ∑引入状态反馈:⎥⎦⎤⎢⎣⎡=-=—————式中10k k k xk u ν (3-3-55)可求得对—x 的闭环系统),,—————C B k B A (-∑的状态空间表达式: 仍为能控标准型,即: ⎪⎩⎪⎨⎧=+-=•————————)(x C Y u x B k B A X 式中 ⎥⎦⎤⎢⎣⎡+-+-=-)()(—————1100k a k a 10k B A则闭环系统),,(——————C B k B A -∑的特征多项式和传递函数分别为: )()(—————00112k k a k a k)B (A SI det )(f ++++=⎥⎦⎤⎢⎣⎡--=S S S )k a (k a b S b B )k B A (SI C )(00112011k ———————)(+++++=⎥⎦⎤⎢⎣⎡--=-S S S φ3)被控系统如图3-3-61所示:其中:05.01==T T i则其被控系统的状态方程和输出方程为:[]XY uX X 0110012020=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=期望性能指标为:超调量M P ≤20%;峰值时间t P ≤0.5秒。
6.2 反馈控制和极点配置 共64页

其中
[K1 K2]KPc
状态反馈极点配置定理(9/11)
由上式可知,状态完全不能控子系统的系统矩阵 A~22的特征 值不能通过状态反馈改变,即该部分的极点不能配置。 虽然状态完全能控子系统的 A~11的特征值可以任意配 置,但其特征值个数少于整个系统的系统矩阵 A 的特
2) 期望的极点必须是实数或成对出 现的共轭复数;
3) 期望的极点必须体现对闭环系统 的性能品质指标等的要求。
p2 p1
p3
反馈控制与极点配置(4/5)
基于指定的期望闭环极点,线性定常连续系统的状态反馈极点 配置问题可描述为: 给定线性定常连续系统 x AxBu
确定反馈控制律 uKxv
使闭环系统K(A-BK,B,C)的极点任意配置的充分必要条件为
被控系统(A,B,C)状态完全能控。
□
证明 (1) 先证充分性(条件结论)。
即证明,若被控系统(A,B,C)状态完全能控,则状态反馈闭 环系统K(A-BK,B,C)必能任意配置极点。
由于线性变换和状态反馈都不改变状态能控性,而开环被 控系统(A,B,C)状态能控,因此一定存在线性变换能将其 变换成能控规范II形。
由于状态反馈闭环系统保持其开环系统的状态完全能控 特性,故该闭环系统只能是状态不完全能观的。
这说明了状态反馈可能改变系统的状态能观性。 从以上说明亦可得知,若SISO系统没有零点,则状态反馈不
改变系统的状态能观性。
SISO系统状态反馈极点配置方法(1/10)
6.2.2 SISO系统状态反馈极点配置方法
本节讨论如何利用状态反馈与输出反馈来进行线性定常连续 系统的极点配置,即使反馈闭环控制系统具有所指定的闭环极 点。 对线性定常离散系统的状态反馈设计问题,有完全平行的 结论和方法。
反馈控制与极点配置
例 考察下述能控能观的系统
它在输出反馈下u=-hy下的闭环系统为 其闭环特征多项式为s2+h。
上例说明,输出反馈对能控能观系统可以改变极点位置,但不能 进行任意的极点配置。
2. 系统的开环特征多项式f(s)和由期望的闭环极点所确定的闭 环特征多项式f*(s)分别为
f(s)=s3+3s2+2s f*(s)=s3+4s2+6s+4 则相应的反馈矩阵K为 K=[a3*-a3 a2*-a2 a1*-a1]
因此,在反馈律u=-Kx+v下,闭环系统状态方程为
在例3中,由给定的传递函数通过状态反馈进行极点配置时需 先求系统实现,即需选择状态变量和建立状态空间模型。 ➢ 这里就存在一个所选择的状态变量是否可以直接测量、 可以直接作反馈量的问题。
证明过程的思路为:
•对状态不 完全能控开 环系统进行 能控分解
•对能控分 解后的系 统进行状 态反馈
•其完全不 能控子系统 不能进行极
点配置
•与假设 矛盾,必
要性得 证
➢ 被控系统(A,B,C)状态不完全能控,则一定存在线性变换 x=Pc ,对其可进行能控分解,得到如下状态空间模型:
其中状态变量 是完全能控的;状态变量 是完全不能控
➢ 由于状态反馈闭环系统保持其开环系统的状态完全能控 特性,故该闭环系统只能是状态不完全能观的。
➢ 这说明了状态反馈可能改变系统的状态能观性。
➢ 从以上说明亦可得知,若SISO系统没有零点,则状态反馈不 改变系统的状置方法
极点配置算法1(维数较大) 1. 对于SISO线性定常连续系统的极点配置问题,若其状态 空间模型为能控规范I形,则相应反馈矩阵为 K=[k1 … kn]=[an*-an … a1*-a1] 其中ai和ai*(i=1,2,…,n)分别为开环系统特征多项式和所期 望的闭环系统特征多项式的系数。
7.4 状态反馈和极点配置
这是具有线性状态反馈的闭环系统的特征方程,它一定与期望特征方程相等。 通过使s的同次幂系数相等,可得
7
极点配置定理_充分性
a0 k0 a0
a1 k1 a1
an 1 kn 1 an 1 求解上述方程组,得到 ki
的值,则
K KP 1 [k 0 k1
[ a0 a0 a1 a1
0 1 an1 0
0 0 1 Bc P B 0 1
6
极点配置定理_充分性
设 K KP [k 0 k1 kn 1 ] 由于 u r Kx r KPx ,此时该系统的状态方程为 x ( Ac Bc K ) x Bc r
从而确定出a1* , a2 *,… an *的值。 ◆最后得到状态反馈增益矩阵K为 K [ a0 a0 a1 a1
1 an 1 an 1 ] P
10
极点配置 例1
【例】 考虑如下线性定常系统
1 0 0 0 , B 0 A 0 0 1 Ax Bu x 5 6 1 1 利用状态反馈控制,希望该系统的闭环极点为s = -2±j4和s = -10。试确定状 态反馈增益矩阵K。
0 0 1 Ac P AP 0 a0
x Ac x Bcu
1 0 0 a1
0 1 0 a2
上式为可控标准形。选取一组期望的特征值为 1 , 2 , , n ,则 期望的特征方程为
( s 1 )( s 2 )
* n 1 * * ( s n ) s n an s ... a s a 1 1 0 0
an1 1 0 0 1 0 0 0
极点配置

只要原系统(A,B,C)是能控(见 能控性)的,则这样的反馈增益矩阵K就一定可以找到。反馈 增益矩阵K的 求解,对于单输入单输出情况,已有较为简单的计算公式;对于一般的多输入多输出情况,计算步骤要复杂得多, 往往需要采用计算机来处理。
极点配置
数学术语0103 定Fra bibliotek 05 配置方法
目录
02 意义 04 状态反馈
通过比例环节的反馈把定常线性系统的极点移置到预定位置的一种综合原理。 极点配置的实质是用比例反馈去改变原系统的自由运动模式,以满足设计规定的性能要求。
pole assignment
极点配置定常线性系统的动态特性在很大程度上取决于它的传递函数矩阵(见传递函数)的极点在复数平面 (表示复数 s=x+jy的直角坐标平面)上的位置。
谢谢观看
首先必须指出,状态空间中,任意极点配置的充分且必要的条件是,系统必须是完全状态可控的。
配置方法
如果已知系统的模型或传递函数,通过引入某种控制器,使得闭环系统的极点可以移动到指定的位置,从而 使系统的动态性能得到改善,这种方法称为极点配置法。
有一控制系统其中a>b>0,要求设计一个控制器,使系统稳定, 解:(1)校正前,闭环系统的极点: s-a+s+b=0 s= > 0 因而控制系统不稳定。 (2)在控制对象前串联一个一阶惯性环节, c>0,则闭环系统极点: 显然,当 c-a+1>0,b-ac>0时,系统可以稳定。但此对参数 c的选择依赖于 a、 b。因而,可 选择控制器, c、 d,则有特征方程: 当b+d+c>a,时,系统稳定。 本例由于原开环系统不稳定,因而不能通过简单的零极点相消方式进行控制器的设计,其原因在于控制器的 参数在具体实现中无法那么准确,从而可能导致校正后的系统仍不稳定。
线性系统的状态反馈及极点配置
线性系统的状态反馈及极点配置1.前言随着现代控制理论的不断发展和成熟,线性系统的状态反馈控制在控制理论中得到了广泛的应用,并成为了控制领域中重要的一种控制方法。
状态反馈控制能够将系统的状态进行反馈,并利用反馈得到的信息对系统进行控制,从而达到使系统达到预期控制目标的目的。
本文将从状态反馈控制的原理和实现方法两方面介绍线性系统的状态反馈及极点配置。
2.状态反馈控制的原理状态反馈控制是建立在现代控制理论的基础上的一种高级控制方法。
状态反馈控制的基本思想是在系统中引入反馈环节,设计一个反馈控制器,将系统的状态量反馈给控制器,控制器再根据反馈信号输出控制量,以期望控制系统按照预期的运动轨迹运行。
因此,状态反馈控制要实现以下两个步骤:- 系统状态量的测量:首先要在系统中安装测量传感器,实时地测量系统状态量,使得状态量可以被反馈到控制器中。
- 反馈控制器的设计:设计一个反馈控制器,将系统的状态量反馈给控制器,控制器再根据反馈信号输出控制量,实现对系统的精确控制。
因此,状态反馈控制的基本原理就是将系统状态量反馈到控制器中,以期望控制系统按照预期的运动轨迹运行。
2.2 状态空间模型与状态反馈控制状态空间模型是状态反馈控制的基础。
状态空间模型是一种方便描述线性系统动态行为和控制器的模型。
对于线性时不变系统,我们可以用如下的状态变量描述:x(t) = [x1(t),x2(t),...,xn(t)]T其中,x(t) 是系统在时刻 t 的状态量,n 是状态量的数量,x1(t),x2(t),...,xn(t) 分别是系统的每个状态量。
状态空间模型可以用一组线性常微分方程描述:dx/dt = Ax + Bu其中,A 是系统的状态方程矩阵,B 是输入矩阵,C 是输出矩阵,D 是直接耦合矩阵。
系统的状态反馈控制可以表示为:u(t) = -Kx(t)其中,K 是状态反馈矩阵。
将状态反馈控制引入到状态空间模型中,可以得到控制器的状态空间模型为:y = Cx上述控制器的状态空间模型就是一个闭环系统,通过反馈控制器将系统状态返回到系统,形成了一个反馈环。
极点配置的原理
极点配置的原理今天来聊聊极点配置的原理。
我不是一开始就接触到极点配置这个概念的,之前做项目的时候遇到了控制系统的性能优化问题,就开始研究起它来了。
极点配置就像是给控制系统这个大机器调音一样。
咱们先从生活现象说起,想象一下开车。
汽车有个速度控制系统,我们想要汽车的速度按照我们期望的方式变化,比如说快速稳定地达到一个设定速度,并且在遇到一些小干扰(像路面有点小坡度)的时候还能保持稳定。
这个时候极点配置就像调整汽车的“脾气秉性”的工具一样。
在控制系统里,系统的特性跟极点的位置密切相关。
从原理上讲呢,极点就是系统传递函数分母等于零的根。
我记得第一次接触这个理论公式的时候,觉得满脑袋都是浆糊。
比如说一个简单的二阶系统,它的极点会影响系统的响应速度和稳定性,就像一个跷跷板,两个极点要处于一个合适的位置,系统才会又快又稳。
这可是我琢磨了好久才有点理解的地方。
说到这里,你可能会问,这个极点怎么才能配置到我们想要的位置呢?这就要用到反馈控制理论了。
就像我们在训练宠物一样,通过反馈(知道宠物做的好不好,然后奖惩)来让系统的特性符合我们的要求。
比如说,通过调整反馈增益,就可以改变极点的位置。
老实说,我一开始也不明白极点配置到底为啥这么重要。
后来遇到好多实际例子才恍然大悟。
实际在航空航天领域,飞行器的姿态控制系统要很精确才行,极点配置就大有用武之地。
合理的极点配置能让飞行器快速准确地调整姿态且保持稳定,就像杂技演员总能在高空钢丝上保持平衡一样。
再讲讲相关的注意事项吧。
极点配置虽然很强大,但并不是随心所欲的,要考虑系统的物理可实现性以及对于外部干扰和不确定性的鲁棒性。
比如说,不能要求汽车做到像火箭那样的加速能力,因为汽车有它的物理限制。
这就像我们人一样,虽然有潜力可以挖掘,但是也有自身的极限。
我觉得极点配置这个原理还有很多可以延伸思考的地方。
比如如何在更加复杂多变的环境下进行适当地极点配置,这就像在不断变化的天气下管理一个大农场,要根据不同情况调整策略。
线性系统状态反馈区域极点配置算法研究
线性系统状态反馈区域极点配置算法研究摘要20世纪50年代后期,控制理论由经典控制理论向现代控制理论转变,现代控制理论是在引入状态和状态空间概念的基础上发展起来的。
与经典控制理论一样,现代控制系统中仍然主要采用反馈控制结构,但不同的是,经典控制理论中主要采用输出反馈,而现代控制系统中主要采用内部状态反馈。
状态反馈可以为系统控制提供更多的信息反馈,从而实现更优的控制。
闭环系统极点的分布情况决定于系统的稳定性和动态品质,因此,可以根据对系统动态品质的要求,规定闭环系统的极点所应具备的分布情况,把极点的配置作为系统的动态品质指标。
这种把极点配置在某位置的过程称为极点配置。
在空间状态法中,一般采用反馈系统状态变量或输出变量的方法,来实现系统的极点配置。
本论文对线性系统的状态反馈区域极点配置的算法进行了研究,分别以具有 稳定裕度和具有圆域极点约束的状态反馈控制器设计为例,利用线性矩阵不等式LMI处理方法,编写系统的MATLAB仿真程序。
最后以同样的方法对不确定系统状态反馈区域极点配置进行了研究,结果证明了设计方法的正确性和有效性。
关键词:线性系统;状态反馈;极点配置;线性矩阵不等式;不确定系统Algorithmic Research for Regional PoleAssignment of Linear System Via StateFeedback ControllersABSTRACTIn the late 1950s, control theory later by classical control theory to modern control theory shift, modern control theory is introducing state and state space concept developed on the basis of. As with classical control theory, modern control system still mainly uses the feedback control structure, but different is, classical control theory mainly uses the output feedback, and modern control system mainly uses the internal state feedback. State feedback control for system provide more information feedback, so as to achieve better control.The distribution of closed-loop system poles depends on system stability and dynamic quality, therefore, can according to the system dynamic quality request, provisions that poles of close-loop system should have the distribution of the pole, configuration of the system dynamic quality indicators. The position of the poles in the process called poles. In space, the general state method in the feedback system state variables or output variable method to achieve system poles. This thesis studied the algorithm of linear system state feedback regional poles, and respectively by the state feedback controller design of stability margin of and has round domain constraints as examples, by using the linear matrix inequality LMI treatment methods, writing MATLAB simulation program of system. Finally in the same way the uncertain system state feedback regional poles are studied, and the result shows the design method is correct and effective.Key words:Linear system;State feedback;Pole placement;LMI;Uncertain system目录摘要............................................................................................................................................ΙABSTRACT...........................................................................................................................П1 绪论 (1)1.1课题背景及意义 (1)1.2 极点配置简介 (1)1.3 本论文研究的主要工作 (2)2理论基础及数学准备 (3)2.1 区域极点配置问题 (3)2.2 状态反馈 (4)2.3 线性矩阵不等式LMI (6)2.3.1 线性矩阵不等式LMI基本变换引理 (7)2.3.2 LMI工具箱介绍 (8)2.4 本章小结 (10)3线性定常系统状态反馈区域极点配置算法研究 (11)3.1 精确极点配置 (11)3.1.1 问题描述 (11)3.1.2 算法步骤 (12)3.1.3 仿真分析 (12)3.2具有稳定裕度的区域极点配置 (15)3.2.1 问题描述 (16)3.2.2具有稳定裕度的状态反馈控制器设计 (16)3.2.3程序清单 (17)3.2.4仿真结果 (18)3.3具有圆域极点约束的状态反馈控制器设计 (21)3.3.1 问题描述 (21)3.3.2具有圆域极点约束的状态反馈控制器设计 (21)3.3.3 程序清单 (22)3.3.4仿真结果 (23)3.4 本章小结 (26)4 线性不确定系统状态反馈区域极点配置算法研究 (27)4.1 不确定性 (27)4.2线性不确定系统区域极点配置 (27)4.2.1 问题描述 (27)4.2.2 不确定系统区域极点约束的状态反馈控制器设计 (28)4.2.3 仿真分析 (30)4.3 本章小结 (32)结论 (33)致谢 (34)参考文献 (35)1 绪 论1.1 课题背景及意义在20世纪50年代蓬勃兴起的航天技术的推动下,1960年前后开始了从经典控制理论到现代控制理论的过渡,其中一个重要标志就是卡尔曼系统地将状态空间概念引入到控制理论中来。
极点配置问题.ppt

K
[ 0
* 0
,
1
1* ,... n1
* n 1
]
5 求出原系统的增益阵K
K
K
T 1 c1
x ( A BK)x bv, y cx
5.2 极点配置问题
例题5-2的另一种解法.
w(s)
10
s(s 1)(s 2)
2
(2 k1) k0
f *() ( 1 j)( 1 j) 2 2 2
多项式相等
k0 2, k1 4
5.2 极点配置问题
系统满足什么 条件可以通过 反馈方法任意 配置极点?
单位阶跃(u(t-1))响应
反馈前单位阶跃响应?
5.2 极点配置问题
极点任意配置极点任意配置51线性反馈系统的基本结构和特性?从输出到x导数的反馈bvgcxax第四章作业习题41434652极点配置问题基于图像传感器的模型小车轨迹跟踪控制系统综合的目的是设计反馈增益矩阵将闭环系统的极点恰好配置在根平面上期望极点的位置
5.2 极点配置问题
系统性能指标的要求
一组期望极点的要求
K k0 , k1,...kn1
x ( A b K )x b u
y cx
0
1
0
AbK
0
0
0 ... 0
0
1
(a0 k0 ) (a1 k1) ... (an1 kn1)
5.2 极点配置问题
闭环特征多项式为
1 0
f () det(I A) 0
1
状态反馈极点配置基本理论与方法
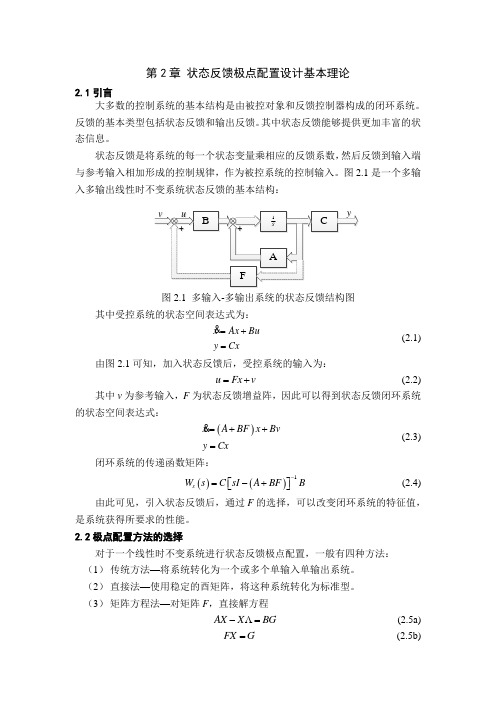
第2章 状态反馈极点配置设计基本理论2.1引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
图2.1是一个多输入多输出线性时不变系统状态反馈的基本结构:图2.1 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+= (2.1)由图2.1可知,加入状态反馈后,受控系统的输入为:u Fx v =+ (2.2)其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++= (2.3)闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦ (2.4)由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
2.2极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3) 矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ= (2.5a) FX G = (2.5b)(4) 特征向量法—先找到特征向量x j (等式(2.5)中矩阵X 的列向量),然后利用等式(2.5b)求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解(2.5a)方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
第13讲 反馈与极点配置

➢ 状态反馈闭环系统的系统结构可如图5-1所示
vu
+
B
x'
+
-
+
A
x
y
C
开环系统
K
图5-1 状态反馈系统的结构图
状态反馈的描述式(2/3)
u=-Kx+v 状态反馈闭环系统的状态空间模型可描述如下:
➢ 设开环系统状态空间模型和状态反馈律分别记为
x Ax Bu
y
Cx
u Kx v
其中K为rn维的实矩阵,称为状态反馈矩阵;v为r维的输入向 量,亦称为伺服输入。
❖ 该问题称为系统鲁棒性问题。
❖ 基于提高系统鲁棒性的控制综合方法也称为鲁 棒控制方法。
下面,本章将就这些系统综合的主要问题,如 ➢ 极点配置、 ➢ 镇定、 ➢ 解耦与 ➢ 观测器问题,
基于状态反馈理论作细致讨论。
概述(12/12)
5.1 状态反馈与输出反馈
状态反馈与输出反馈(1/3)
控制理论最基本的任务是,对给定的被控系统设计能满足所 期望的性能指标的闭环控制系统,即寻找反馈控制律。
➢ 状态反馈和输出反馈是控制系统设计中两种主要的反馈 策略,其意义分别为将观测到的状态和输出取作反馈量以 构成反馈律,实现对系统的闭环控制,以达到期望的对系 统的性能指标要求。
➢ 在经典控制理论中,一般只考虑由系统的输出变量来构成 反馈律,即输出反馈。
➢ 在现代控制理论的状态空间分析方法中,多考虑采用状态 变量来构成反馈律,即状态反馈。
rank[I-A+BK B]=n
来判定,而
r[I -A BK
B] r [I -A
I B] K
0IBiblioteka r[I-A
区域极点配置方法
区域极点配置方法嘿,朋友们!今天咱来聊聊区域极点配置方法。
这玩意儿啊,就像是给一个复杂的大机器装上了精准的操控杆。
你想想看,一个系统就好比是一辆汽车,而极点配置呢,就是让你能随心所欲地掌控这辆车的速度、方向和性能。
它能让系统按照我们期望的方式运行,就像你能让汽车乖乖地沿着你指定的路线前进。
说起来啊,区域极点配置方法可真是个神奇的东西。
它能在看似混乱无章的系统中找到关键的节点,然后通过巧妙的调整,让整个系统变得井井有条。
这难道不厉害吗?就好像一个神奇的魔术师,能把乱七八糟的东西变得整整齐齐。
那怎么才能做好区域极点配置呢?这可得有点技巧啦。
首先得对系统有深入的了解,就像你得知道汽车的每个零部件是干啥的。
然后呢,根据你的需求和目标,找到合适的极点位置。
这可不是随便找的哦,得经过深思熟虑。
在这个过程中,可不能马虎大意。
你得像个细心的工匠一样,一点点地雕琢,一点点地调整。
要是不小心弄错了一点,那可能整个系统就会变得不听话啦。
而且啊,区域极点配置方法可不是一成不变的。
不同的系统,不同的情况,都需要有不同的策略。
这就好比不同的路况需要不同的驾驶技巧一样。
有时候可能很顺利,一下子就找到了最佳配置;但有时候可能会遇到各种难题,让你头疼不已。
但别灰心呀,办法总比困难多嘛!咱再举个例子,好比一个乐团演奏。
每个乐器就像是系统中的一个部分,而指挥家就是那个进行极点配置的人。
指挥家要通过巧妙的指挥,让各种乐器发出和谐美妙的声音。
这可不简单呐!区域极点配置方法在很多领域都有重要的应用呢。
比如在控制工程中,它能让机器更加智能地运行;在通信领域,它能让信号传输更加稳定可靠。
总之呢,区域极点配置方法就像是一把神奇的钥匙,能打开系统高效运行的大门。
虽然它可能有点复杂,有点难搞,但只要我们用心去学,用心去实践,就一定能掌握它的精髓。
你说是不是呢?让我们一起加油,去探索区域极点配置方法的奇妙世界吧!。
极点配置状态反馈控制器设计方法
极点配置状态反馈控制器设计方法
嘿,朋友们!今天咱来聊聊极点配置状态反馈控制器设计方法。
这玩意儿啊,就像是给一个系统装上了精准的导航仪,能让它乖乖地按照咱的想法走。
你看啊,一个系统就好比是一辆汽车,而极点配置状态反馈控制器就是那个掌握方向盘的司机。
咱得通过巧妙的设计,让这个司机能精准地操控汽车,该加速的时候加速,该转弯的时候转弯,不能有一点儿含糊。
设计这个控制器就像是搭积木,一块一块地拼凑起来。
咱得先了解系统的特性,就像了解汽车的性能一样。
然后呢,根据这些特性来选择合适的参数,这可不能马虎,得仔细琢磨。
比如说,要是参数没选好,那可就糟糕啦!就像司机开车老是开歪一样,系统也会变得不稳定,那可不行!咱得让系统稳稳当当的,该干啥干啥。
这其中的学问可大着呢!就好像做菜一样,各种调料得搭配得恰到好处,才能做出美味的菜肴。
极点配置状态反馈控制器的设计也是如此,每个环节都得精心处理。
而且哦,这个设计方法可不是一成不变的。
不同的系统就像不同口味的人,得用不同的方法去对待。
有时候得灵活一点,不能太死板啦。
想想看,如果所有系统都用一种方法去设计控制器,那多无趣啊!就像所有人都穿一样的衣服,那还有啥意思呢?咱得根据实际情况来调整,找到最适合的方案。
在实际应用中,这可真是帮了大忙啦!它能让那些复杂的系统乖乖听话,按照我们的要求运行。
这多厉害呀!难道不是吗?
所以啊,极点配置状态反馈控制器设计方法可真是个宝贝!咱可得好好研究,好好利用。
让它为我们的各种系统服务,让它们变得更智能、更高效。
怎么样,是不是觉得很有意思呢?别犹豫啦,赶紧去试试吧!。
状态反馈与闭环极点配置极点配置条件

状态观测器的闭环极点可任意配置的充要条件为
系统状态完全可观测
30
例: 设系统的状态空间表达式为 1 1 0 1 状态方程同前 1 1 0 x 0 u x 面极点配置例 0 1 3 0
4
状态反馈系统的状态方 程为 ( A BK ) x Br x yCx
状态反馈系统的传递函 数为 G ( s ) C ( sI A BK ) 1 B
综合的手段:改变 K 阵的参数 综合的目的:改变系统矩阵,从而改变系统的特性 注:状态反馈通常只用系数阵即可满足要求, 一般不需要采用动态环节
自动控制原理
控制系统分析与设计的
状态空间方法2 ——综合与设计
(第八章)
1
状态空间法综合的基本概念
综合问题的三大要素:
受控系统、性能指标、反馈控制律
综合与设计的主要特点:
以采用状态反馈为主 具有较系统的综合理论 基于非优化型指标的极点配置方法 基于优化类性能指标的目标函数极值法
2
主要内容
通过状态反馈,将系统的闭环极点配置为
1 2 3 1
15
解: 状态反馈系统的特征多项式为
f ( s ) det[ sI A BK ] s 3 ( k 1 3 )s 2 ( k 2 2 k 1 2 )s ( k 3 3 k 2 3 k 1 6 )
r
-
u
B
x
∫
A
x
C
y
H
6
3.
状态反馈与输出反馈比较
反馈功能: 状态反馈——完全反馈 输出反馈——不完全反馈
反馈作用: 两种反馈均可改变系统的特征方程和特征值; 输出反馈可视为状态反馈的一种特例。
实验二 状态反馈与极点配置
实验二 状态反馈与极点配置一、实验目的a) 掌握状态反馈极点配置的设计方法。
b) 掌握运用模拟运算放大电路实现状态反馈。
c) 验证极点配置理论。
二、实验仪器a) TDN —AC/ACS 型自动控制系统实验箱一台b) 示波器c) 万用表三、实验原理和电路为了更好地达到系统所要求的各种性能指针,需要通过设计系统控制器,改善原有系统的性能。
由于系统的性能与其极点分布位置有密切关系,因而极点配置是系统设计的关键。
极点配置就是利用状态反馈或输出反馈使闭环系统的极点位于所希望的极点位置。
在系统综合设计中,状态反馈和输出反馈是两种常用的反馈形式,而在现代控制理论中系统的物理特性是采用系统内部状态变量来描述的,利用内部状态变量乘以系数(向量)与系统参考输入综合构成的反馈系统,具有更优的控制效果。
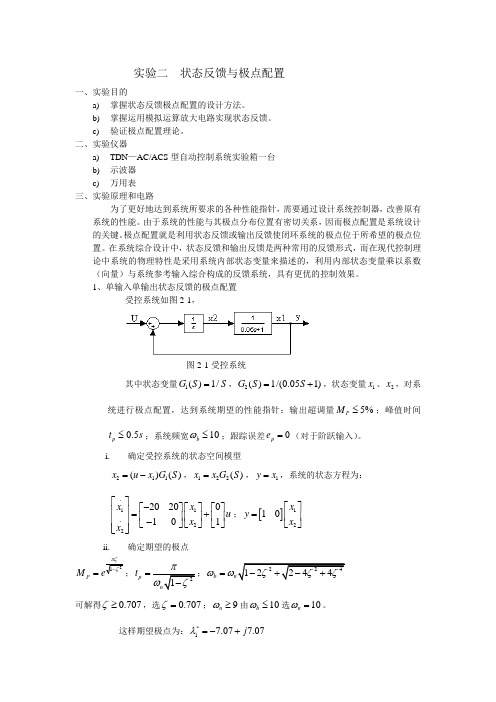
1、单输入单输出状态反馈的极点配置受控系统如图2-1,图2-1受控系统其中状态变量1()1/G S S =,2()1/(0.051)G S S =+,状态变量1x 、2x ,对系统进行极点配置,达到系统期望的性能指针:输出超调量5%P M ≤;峰值时间0.5p t s ≤;系统频宽10b ω≤;跟踪误差0p e =(对于阶跃输入)。
i. 确定受控系统的状态空间模型211()()x u x G S =-,122()x x G S =,1y x =,系统的状态方程为:.11.2220200101x x u x x ⎡⎤-⎡⎤⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦;[]1210x y x ⎡⎤=⎢⎥⎣⎦ ii.确定期望的极点21P M e ζ-=;21p n t ωζ=-;22412244b ωωζζζ=-+-+可解得0.707ζ≥,选0.707ζ=;9n ω≥由10b ω≤选10n ω=。
这样期望极点为:*17.077.07j λ=-+*27.077.07j λ=--iii. 确定状态反馈矩阵K原系统特征多项式:12110det()...2020n s n sI A s a s a s a s s ---=++++=++期望的闭环系统特征多项式:**212det()()()14.1100sI A BK s s s s λλ--=--=++ 计算K :K =[10020-,14.120-]=[80,-5.9]计算变换矩阵p :1111111[...]...1n n n a p A b Ab b a a ----⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦1/20011p ⎡⎤=⎢⎥-⎣⎦[][]1/20080 5.99.9 5.911K K p ⎡⎤==-=-⎢⎥-⎣⎦iv. 确定输入放大系数L闭环传递函数为2()20/(14.1100)G s s s =++系统要求跟踪阶跃信号误差为0则000lim(1())lim (1/()/)1/5p t s e y t s s G s s L →→==-=-=- 得L=52、极点配置的系统结构图图2-2极点配置后的系统将原系统的反馈线路与状态x1反馈线路合并后图2-3极点配置后的系统一、实验内容及步骤1、根据图2-4接线图2-4极点配置后系统的模拟电路M、峰值时间2、输入阶跃信号,用示波器观察并记录系统输出的波形,测量超调量Pt。
输出反馈极点配置ppt
{A Rnn , B Rn p , C R pn }
基于结构特性向量组成p×p矩阵:
E1 E E p
则存在输入变换 {L R p p }
pn 和状态反馈 {K R }
使包含输入变换状态反馈系统可实现动态解耦的充分必要条件 是E为非奇异,即 det E 0
输出反馈极点配置 状态反馈镇定
状态反馈解耦
一、输出反馈极点配置
主要内容:输出反馈在极点配置上的局限性 1、问题的提法 考虑能控多输入多输入连续时间线性时不变受控系统:
AX BU,X R n,U R p X
Y CX,Y R q
输出反馈型控制率: U FY v 所谓输出反馈极点配置就是,对任意给定期望极点组:
{A Rnn , B Rn p , C R pn }
ij " gij (s)分母多项式次数 "- " gij (s)分子多项式次数 "
定义1【结构特性指数】对于连续时间LTI受控系统 i,当ci Ak B 0,k 0,1,...,i 1,而ci A B 0
i
di
n 1 ,当ci Ak B 0,k 0,1,...,n 1
di min{ i1, i 2 ,..., ip} 1 i 1,2,..., p
0 di n 1
两种定义等价
三、状态反馈动态解耦
E为1 p 行向量 定义2【结构特性向量】对于连续时间LTI受控系统 两种定义等价
(2)问题的实质。在整个时间区域内,把一个p输入p输出 的耦合系统,化为p个独立的单输入单输出系统,且一个输 出y由且仅由一个输入v所控制
ˆi (s) gii (s)v ˆi (s),i 1,2,..., p y
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第22卷第2期南 京 理 工 大 学 学 报Vol.22No.21998年4月 Journal of Nanjing University of Science and Technology Apr.1998基于输出反馈的区域极点配置X王子栋X X 郭 治(南京理工大学信息学院,南京210094)摘要 该文研究输出反馈情形下线性定常连续及离散系统区域极点配置的统一代数刻划问题,即利用完全参数化方法,设计输出反馈控制器,使闭环极点配置于指定圆形区域内。
文中导出了期望输出反馈控制器存在的充要条件,并进一步给出了这类控制器的全部参数化刻划。
最后,得到了若干有益的推论,包括线性离散及连续系统稳定化控制器的统一代数表示等。
关键词 线性系统,输出反馈,极点配置,参数法,代数刻划分类号 TP 202.1,T P 214.1众所周知,线性定常系统的稳态及动态特性直接受其极点所在位置的影响,因而极点配置问题一直是控制理论研究中基本而重要的课题之一,其在工程实践中也具有明显的应用背景,如飞行控制系统的设计以及柔性结构的振动控制等[1]。
迄今为止,精确极点的配置问题已得到了很好的研究。
在过去的十年中,区域极点的配置问题也开始受到充分的注意,涌现出一批成果[2][3]。
目前,区域极点配置的相关文献中的大部分均是针对某性能指标给出具体的设计方法,且均集中于状态反馈情形,缺乏一定的通用性。
本文对连续及离散线性定常系统使用统一的代数方法,给出了配置闭环极点至给定圆形区域的输出反馈控制器的全部参数化刻划,为区域极点配置问题提供了一条具有理论意义及应用价值的新途径。
1 问题的描述考虑线性定常连续系统x a (t )=A x (t )+B u (t ),y (t )=Cx (t )及线性定常离散系统x (k+1)=A x (k )+Bu (k ),y (k )=Cx (k ),其中x ∈R n 为状态,u ∈R m 为控制输入,y ∈Rp 为测量输出,A 、B 、C 为适维已知常数阵。
(A ,B )及(A ,C )分别为可控和可观的。
考虑圆形区域D (A ,r ),其中在连续时间情形D (A ,r )表示圆心在A +j 0(A <0)处、半径为r (r <-A )的圆,在离散时间情形D (A ,r )表示单位圆内圆心位于A +j 0、半径为r 的圆。
这里均考虑复平面。
X X XX 王子栋 男 32岁 副教授国家自然科学基金及高校博士学科点专项科研基金资助项目本文于1997年1月14日收到本文考虑的问题可描述为设计输出反馈控制律u(t)=K y(t)或u(k)=K y(k)使得闭环极点,即det[sI-(A+BK C)]=0的根位于预先给定的圆形区域D(A,r)内。
下面将给出期望控制律存在的充要条件及解析表达式。
2 主要结果及证明引理1[2] 令A c=A+B K C,考虑矩阵方程 -A!c P-A PA T c+A c P A T c+(A2-r2)P=-Q(1)其中Q为任意正定矩阵。
则闭环矩阵A c的根位于给定区域D(A,r)内,当且仅当存在正定解P>0满足(1)式。
说明1 由引理1知,若存在反馈增益K、正定阵P、Q同时满足方程(1),则区域极点配置问题即可解决。
为方便叙述,给出如下定义。
定义 对给定的正定矩阵对(P,Q),若存在K使得方程(1)关于该矩阵对(P,Q)成立,则该正定对(P,Q)称为可达的。
这样,本文的目的可等价地叙述为:(1)找到正定矩阵对(P,Q)可达的充要条件;(2)对可达的矩阵对(P,Q),给出相应的输出反馈增益K的代数表达式。
下面给出一个有用的引理。
引理2[5] 设X∈R m×n且Y∈R m×p(n≤p),则存在正交阵V(即VV T=I)满足Y= X V当且仅当X X T=YY T,且此时V的通解可表示为 V=V X I00UV T Y,U∈R(n-r X)×(p-r X),UU T=I其中V X及V Y来自X及Y的奇异值分解 X=U X Z X000V T X,Y=U YZ Y000V T Y这里r X=rank(X),U X=U Y,Z X=Z Y。
下面将首先研究(P,Q)可达的充要条件。
注意到方程(1)可等价地表示为 (A c-A I)P(A c-A I)T=r2P-Q(2)因上式左端非负定,则P、Q应满足r2P-Q≥0。
进一步,假定r2P-Q>0,并令R =r2P-Q=T T T,其中T为R的平方根因子,则(2)式可改写为[(A c-A I)P12][(A c-A I)P12]T=T T T。
由引理2,此式成立等价于存在正交阵V使得(A c-A I)P12=T V,或BK C =T VP-12+A I-A。
而存在K使此式成立的充要条件为[6] (I-B B+)(T VP-12+A I-A)=0(3) (TV P-12+A I-A)(I-C+C)=0(4) (3)式即为 (I-B B+)TV=(I-BB+)(A-A I)P12(5)注意到I-C+C对称且V T=V-1,故(4)式等价于 (I-C+C)(A T-A I)(T T)-1V=(I-(6) 98南 京 理 工 大 学 学 报 第22卷第2期令 X = (I -BB +)T(I -C +C )(A T -A I )(T T )-1,Y =(I -BB +)(A -A I )P 12 (I -C +C )P -12则(5)(6)式成立等价于存在正交阵V ,使 X V =Y(7)由引理2知,(7)式等价于X X T =YY T 。
注意到由此式可产生四个等式,其中两个为恒等式,而另两个为 (I -B B +)[r 2P -Q -(A -A I )P (A -A I )T ](I -BB +)=0(8) (I -C +C )[(A -A I )T (r 2P -Q )-1(A -A I )-P -1](I -C +C )=0(9)从而有如下定理。
定理1 给定期望极点区域D (A ,r )及满足r 2P -Q >0的正定矩阵对(P ,Q ),则(P ,Q )可达当且仅当(P ,Q )满足(8)、(9)两式。
下面继续寻找相应于可达阵对(P ,Q )的输出反馈控制器K 的集合。
由文献[6]知,若(3)、(4)两式成立,或(P ,Q )可达,则K 的通解可表示为 K =B +(T V P-12+A I -A )C ++Z -B +B ZCC +(10)其中Z 为任意适维矩阵,而V 为满足(7)式(即(3)、(4)式)的正交阵,故由引理2,V 可表示为 V =V X I 00UV T Y ,U ∈R (2n -r X )×(2n -r X ),UU T =I (11)将(11)式代入(10)式即可得如下定理。
定理2 若满足r 2P -Q >0的正定矩阵对(P ,Q )关于给定的D (A ,r )是可达的,则使该矩阵对可达的全部输出反馈控制器可表示为 K =B +(T V X I 00UV T Y P -12+A I -A )C ++Z -B +B ZCC +(12)其中TT T =r 2P -Q ,X 、Y 的定义见推导过程,V X 、V Y 如引理2中定义,U ∈R(2n -r X )×(2n -r X )为任意正交阵,Z 为适维任意矩阵。
由引理1、2及定理1、2,不难得到如下主要结果。
定理3 给定期望圆形极点区域D (A ,r ),则使得闭环极点位于D (A ,r )的全部输出反馈控制器可由(12)式刻划,而P 、Q 为满足r 2P -Q >0及(8)、(9)式的任意正定阵。
说明2 在工程应用中,可由r 2P -Q >0及(8)、(9)式直接构造出可达正定阵对(P ,Q ),进而由(12)式求出相应的控制器。
为此,可将P 、Q 的元素置为待定参数,直接导出这些参数所满足的约束关系式,然后利用优化方法(如局部数值搜索)求取解的集合[4]。
注意到I -BB +及I -C +C 通常为对角元素是0或1的对角阵且控制器设计可离线进行,上述方法还是可行的。
说明3 本文主要结果对连续及离散系统同样成立,从而为圆形区域极点配置提供了统一的代数方法。
特别地,当A →-∞且-A >r →+∞时,本文结果相当于对一般线性定常连续系统稳定化控制器的刻划;当A =0且r =1时,则主要结果退化为离散时间系统稳定化控制器的参数表示[7]。
说明4 当赋予P 、Q 直接的工程涵义(如将P 理解为线性随机系统的稳态协方差,将Q 99总第98期 王子栋 郭 治 基于输出反馈的区域极点配置100南 京 理 工 大 学 学 报 第22卷第2期理解为白噪声输入的自协方差)时,则本文结果具有一定的工程应用前景。
3 结论本文研究了线性定常连续及离散系统圆形区域极点配置的参数化代数刻划问题,并得到了若干有益的推论。
文中主要结果可推广至动态输出反馈情形、含参数扰动的情形[4],其设计自由度亦可用来满足新的性能指标约束。
参考文献1 Liebst B S,Gar ra rd W L.Desig n of active flutter suppressio n.J G uid Co nt r D ynam,1986,9(1):64~712 Fur ut a K,K im S B.P ole a ssig nment in a specified disk.I EEE T r ans A utomat Contr,1987,32(2):423~4273 Wang Zido ng,Chen Xuemin,G uo Zhi.Contr oller desig n fo r continuous sy stems w ith var i-ance and cir cular pole co nst raint s.Int J Systems Science,1995,26(5):1249~1256 4 W ang Zido ng,T ang Guo qing,Chen X uemin.Ro bust contr oller design fo r uncer tain linear sy stems with circular pole constr aints.Int J Contr ol,1996,65(6):1045~1054 5 Hsieh C,Skelton R E.A ll co var iance co nt ro llers for linear discret e-tim e systems IEEE T r ans.Auto mat Contr,1990,35(8):908~9156 Ben-Isr ael A,Gr eville T N E.G ener alized inv erses:t heo ry and applica tio ns.New Y or k:John Wiley&Sons Inc,19747 王子栋,郭治.线性离散系统稳定化控制器的统一代数刻划.信息与控制,1995,24(3):157~162A Parametric Approach to Regional Pole AssignmentWang Zidong Guo Zhi(School of Inform atio n,NU ST,Nanjing210094)ABSTRACT The unified alg ebraic characterization o f regional pole assig nm ent for linear time-invariant continuous and discr ete-tim e systems is studied in this paper.The go al of this study is to design the output feedback co ntroller such that the closed-loop po les are placed within the specified circular r eg ion by using the parametric method.Necessar y and sufficient conditions for the ex istence of desired output feedback co ntrollers are derived, and the parametrizatio n o f all expected controllers is also g iven.Finally,so me useful coro l-laries are o btained w hich include the algebraic ex pression o f stabilizing co ntro ller s for lin-ear co ntinuous and discr ete-tim e sy stems.KEY WORDS linear sy stems,output feedback,pole allocation,parametr ic methods,alge-br aic characterization。