渐进法及其它算法简述
算法的渐进复杂度分析
算法优化可以降低算法的渐进复杂度, 从而提高算法的效率。常见的算法优化 方法包括选择更高效的算法、减少重复 计算、使用更有效的数据结构等。
算法优化可以减少算法在处理大规模数据时 的计算量和时间复杂度,从而提高算法的实 用性。
算法优化可以改进算法的并行性和 分布式计算能力,从而更好地利用 多核处理器和分布式计算资源,提 高算法的执行效率。
在游戏开发中的算法选择与渐进复杂度分析
要点一
总结词
要点二
详细描述
游戏开发中,算法的渐进复杂度分析有助于优化游戏性能 和提升用户体验。
游戏开发中,算法的选择直接影响到游戏的运行效率和性 能表现。渐进复杂度分析可以帮助我们评估不同算法在游 戏中的性能表现,从而选择适合的算法来优化游戏性能。 例如,对于游戏物理引擎,可以使用碰撞检测和碰撞响应 算法来提高游戏交互性和真实性;对于游戏渲染,可以采 用光线追踪和阴影渲染等技术来提升画面质量和用户体验 。
渐进复杂度分析可以用于比较不同算 法的性能,为实际应用中选择合适的 算法提供依据。
促进学科发展
渐进复杂度分析是计算科学领域的重 要研究方向之一,对算法设计和分析 理论的发展具有重要意义。
未来研究方向与挑战
探索更复杂的算法模型
随着计算科学的发展,越来越多的复杂算法涌现出来,需 要发展更精确、更复杂的渐进复杂度分析方法来评估这些 算法的性能。
THANKS.
渐进复杂度通常用大O表示法来表示 ,例如O(n)、O(n^2)、O(log n)等, 其中n表示输入规模。
为什么关心算法的渐进复杂度
01
算法的效率是衡量算法好坏的重 要标准之一,而渐进复杂度是评 估算法效率的重要指标。
02
通过分析算法的渐进复杂度,可 以了解算法在不同规模输入下的 性能表现,从而在实际应用中选 择合适的算法。
渐进式教学法在算法与程序设计教学中的应用

K y rs( eA c s n gr eP es K y si A t e) i Ie
维 果 茨基 的研 究 表 明 : 育对 学生 的发 展 能 起 到 主导 作 用 教 和促 进 作用 , 需 要确 定 学生 的 两种 水 平 : 但 一种 足 已经 达 剑 的发 展水 平 ( 即现 有 水 平 ) 另 一 种 足 学 生 H 以达 到 的发 展 水 平 , ; f 表 现 为“ 生不 能 独立 完成 任 务 , 『 另 人 的帮 助 下 , 集 体 活 动 学 f在 Ⅱ I 在 中, 通过 模仿 却 能完 成 这些 任 务 ” 。这 两 种 水 平 之 『 的距 离 , 自 j 就
一
程序设计
课 堂教学
渐进式教学法
( ) 次 在义 小 框 t t 1依 e 2坐输 入各 电 阻位 , 叫 车键 来 标 志 x 用 结 束 每 个 电阻位 的输 入 , 加入 列 表框 ; ( ) 每 个 电阻 位 的倒 数 都 累加 到变 量 R 中 ,l s / 1 2把 s H R =lR J
Di RsAsDo be . m u l
Prv t u x2 i ae S b Te t
一
二、 渐进式教学法实施方法
( 找 出所教 内容 的前 置准备知 识及前后新 旧知识 的联 系 一)
实施 渐进 式 教学 法 , 足 找 出所 教 内容 的前 置准 备知 识 , 关键
≯ g簿誊 荔 旁 j ¥ 荔 t 嚣 | } 尊 嚣|簿慧 髫 嚣 雾 |
渐 进 式 教 学法 在 算 法 与 程 序 设 计 教 学 中 的应 用
350 浙 江 省瑞 安 市 第二 中学 220 金 春 成
【 摘 要】 渐进式教 学法是指在教 学过程 中, 照一定的步骤逐 渐深入 或提 高, 按 以达到预期教 学的 目的。渐进式教 学法在 高中 《 法 与程序 设 计》 块 教 学 中有 着 重要 的作 用 。 实施 渐进 式教 学法 , 算 模 关键 是 找 出所教 内容 的前 置 准 备 知 识 , 确 前后 新 旧知 识 的联 明 系 。 准 学生 最近 发展 区 , 教 学 中作 好 铺垫 , 据 学 生认 知规 律 , 简 单到 复 杂 , 入 浅 出去教 学。 找 并在 根 从 深 【 关键词 】 算法
结构力学 渐进法

EI=1 6m
D
iBC iCD
M F -60
1 2 S 4 BA 6 3 S 4 1 1 BC 4
1 6 2 1 8 4 1 6
B
分 14.7 配 与 传 1.5 递
0.2
Mij -43.6 43.6 A 21.9
0.3
92.6 -92.6 92.6 B
B
F
CB 0.445 CF 0.222 0.333 CD
单独使用时对连续梁和无结点线位移刚架的 计算特别方便。
一、基本概念
(1)转动刚度(S): 使杆端发生单位转角时需要施加的杆端弯矩。 SAB=4i
A B
SAB=3i
1
A B
1
SAB=i
A B
SAB=0
A
B
1
SAB=4i SAB与杆的i(材料的性质、横截面 的形状和尺寸、杆长)及远端支承 有关, 而与近端支承无关。
F 21 2
A
q 12kN / m
M1
1
M2
2
B
28.6
50
6.1
100
-28.6 -57.1 -42.9
21.4
-9.2 -12.2
1.8 1.8
-6.1
6.1 3.5 2.6
放松结点1(结点2固定):
S12 4i S1 A 3i 12 0.571 1 A 0.429
… … ...
41.3
-41.3
0
2 3 0.4 BA 2 1 3 0.6 BC 1 S 4 1 CB 4 S 3 1 1 CD 6 2
渐进分布求法
渐进分布求法
渐进分布是指某种特定分布的大样本性质,即在样本量足够大时的极限分布。
求渐进分布的方法主要有以下两种:
1. 样本数据量足够大时,可以根据样本数据的性质和分布情况推断出总体分布的情况。
如果样本数据符合某种分布的特征,可以认为总体分布也符合该分布的特征。
2. 当样本数据量不足或者无法根据样本数据的分布情况推断总体分布时,可以采用假设检验的方法来求渐进分布。
首先,假设总体分布为某种特定的分布,然后利用样本数据检验该假设的合理性。
如果样本数据支持该假设,则可以认为总体分布符合该假设的分布特征;否则,需要重新假设其他分布特征,直到找到最合理的分布特征为止。
在实际应用中,要根据具体情况选择合适的方法来求渐进分布。
同时,要注意样本数据量和分布特征的合理性,避免出现错误的推断。
17个机器学习的常用算法!

17个机器学习的常用算法!1. 监督式学习:在监督式学习下,输入数据被称为“训练数据”,每组训练数据有一个明确的标识或结果,如对防垃圾邮件系统中“垃圾邮件”“非垃圾邮件”,对手写数字识别中的“1“,”2“,”3“,”4“等。
在建立预测模型的时候,监督式学习建立一个学习过程,将预测结果与“训练数据”的实际结果进行比较,不断的调整预测模型,直到模型的预测结果达到一个预期的准确率。
监督式学习的常见应用场景如分类问题和回归问题。
常见算法有逻辑回归(Logistic Regression)和反向传递神经网络(Back Propagation Neural Network)2. 非监督式学习:在非监督式学习中,数据并不被特别标识,学习模型是为了推断出数据的一些内在结构。
常见的应用场景包括关联规则的学习以及聚类等。
常见算法包括Apriori算法以及k-Means算法。
3. 半监督式学习:在此学习方式下,输入数据部分被标识,部分没有被标识,这种学习模型可以用来进行预测,但是模型首先需要学习数据的内在结构以便合理的组织数据来进行预测。
应用场景包括分类和回归,算法包括一些对常用监督式学习算法的延伸,这些算法首先试图对未标识数据进行建模,在此基础上再对标识的数据进行预测。
如图论推理算法(Graph Inference)或者拉普拉斯支持向量机(Laplacian SVM.)等。
4. 强化学习:在这种学习模式下,输入数据作为对模型的反馈,不像监督模型那样,输入数据仅仅是作为一个检查模型对错的方式,在强化学习下,输入数据直接反馈到模型,模型必须对此立刻作出调整。
常见的应用场景包括动态系统以及机器人控制等。
常见算法包括Q-Learning以及时间差学习(Temporal difference learning)在企业数据应用的场景下,人们最常用的可能就是监督式学习和非监督式学习的模型。
在图像识别等领域,由于存在大量的非标识的数据和少量的可标识数据,目前半监督式学习是一个很热的话题。
渐进决策模式

渐进决策模式
渐进决策模式是一种以渐进步骤(gradual steps)形式制定决策的方式,在决策实
施过程中,每一步都有明确的目标,并逐步弥补知识、技能不足之处。
渐进决策模式一般
包括以下几个步骤:
1、拟订目标:渐进决策开始于设定目标,确定需要实现的目标,以及这些目标之间
的重要性。
2、获取信息:收集与渐进决策相关的信息,供决策制定参考。
3、进行决策:完全判断信息的可靠性,并将其综合考虑,提出合理决策方案,具体
可包括确定实施举措、预估成本、制定风险管理计划、跟进可能出现的状况等。
4、汇报:对于尚未达到预期目标的情况,尽快向决策主体汇报,指出问题所在,并
平衡行动方向。
5、实施:将决策方案付诸实施,贯彻落实每一个步骤,并进行细部的指导和监控。
6、总结:总结实施过程,把握实施中可能出现的问题,利用实践中的反馈信息进行
改进,并将思考结果和政策做出调整。
渐进决策模式具有很多优势,可以改善决策制定时的不确定性,将决策分为一系列不
同步骤,使过程逐步实现,可以提高制定决策者抗压能力,更利于让参与者都能清晰地了
解决策作用和角色,也更容易更好地协调准备、经验和决策能力,以及多方相关人员的努力。
此外,渐进决策模式还能帮助决策者更好地控制风险,为他们提供机会分析决策过程,从而获得更多可能得收获。
渐进法及其它算法简述
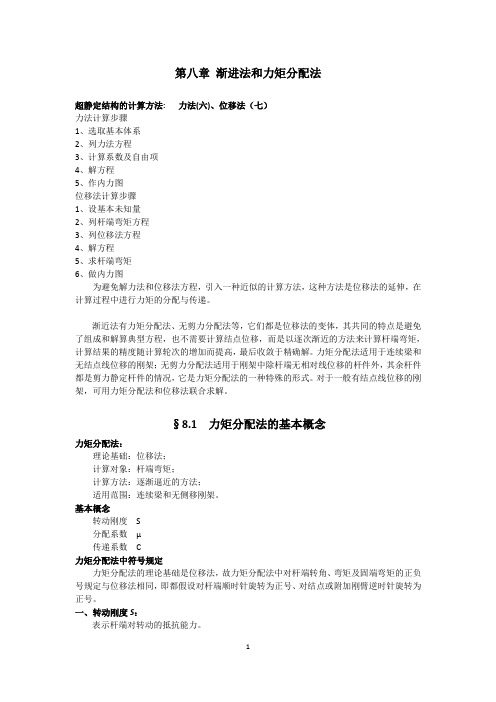
第八章渐进法和力矩分配法超静定结构的计算方法: 力法(六)、位移法(七)力法计算步骤1、选取基本体系2、列力法方程3、计算系数及自由项4、解方程5、作内力图位移法计算步骤1、设基本未知量2、列杆端弯矩方程3、列位移法方程4、解方程5、求杆端弯矩6、做内力图为避免解力法和位移法方程,引入一种近似的计算方法,这种方法是位移法的延伸,在计算过程中进行力矩的分配与传递。
渐近法有力矩分配法、无剪力分配法等,它们都是位移法的变体,其共同的特点是避免了组成和解算典型方程,也不需要计算结点位移,而是以逐次渐近的方法来计算杆端弯矩,计算结果的精度随计算轮次的增加而提高,最后收敛于精确解。
力矩分配法适用于连续梁和无结点线位移的刚架;无剪力分配法适用于刚架中除杆端无相对线位移的杆件外,其余杆件都是剪力静定杆件的情况,它是力矩分配法的一种特殊的形式。
对于一般有结点线位移的刚架,可用力矩分配法和位移法联合求解。
§8.1 力矩分配法的基本概念力矩分配法:理论基础:位移法;计算对象:杆端弯矩;计算方法:逐渐逼近的方法;适用范围:连续梁和无侧移刚架。
基本概念转动刚度S分配系数μ传递系数 C力矩分配法中符号规定力矩分配法的理论基础是位移法,故力矩分配法中对杆端转角、弯矩及固端弯矩的正负号规定与位移法相同,即都假设对杆端顺时针旋转为正号、对结点或附加刚臂逆时针旋转为正号。
一、转动刚度S:表示杆端对转动的抵抗能力。
在数值等于使杆端产生单位转角时需要施加的力矩。
转动刚度SAB 与杆的线刚度i (材料的性质、横截面的形状和尺寸、杆长)及远端支承有关,而与近端支承无关。
二、分配系数设A 点有力矩M ,求M AB 、M AC 和M AD如用位移法求解:A AB A AB AB S i M θθ==4A AC A AC AC S i M θθ==A AD A AD AD S i M θθ==30=∑AM A AD AC ABS S SM θ)(++=∑=++=AAD AC AB A SMS S S M θ所以有M SS M AABAB ∑=M S S M AAC AC ∑= M S S M AAD AD ∑=M M Aj Aj ⋅=μ ∑=AAjAj SS μ 1=∑μ三、传递系数=远端弯矩/近端弯矩M AB = 4 i ABθAM BA = 2 i ABθA在结点上的外力矩按各杆分配系数分配给各杆近端截面,各杆远端弯矩分别等于各杆近端弯矩乘以传递系数。
8.渐进法(1)

EI =1 6m
B
4m
EI =2 4m
C
EI =1 6m
D
i AB
iBC =
2 1 = 8 4
1 2 S BA = 4 × = 6 3 S = 4 × 1 = 1 BC 4
B
2 3 µBA = 2 = 0.4 1+ 3 µ = 0.6 BC
不建立方程组的渐近解法有: 3、不建立方程组的渐近解法有: (1)力矩分配法:适于连续梁与无侧移刚架。 (1)力矩分配法:适于连续梁与无侧移刚架。 力矩分配法 (2)无剪力分配法:适于规则的有侧移刚架。 (2)无剪力分配法:适于规则的有侧移刚架。 无剪力分配法 (3)迭代法:适于梁的刚度大于柱刚度的各种刚架。 (3)迭代法:适于梁的刚度大于柱刚度的各种刚架。 迭代法 它们都属于位移法的渐近解法。 它们都属于位移法的渐近解法。
§8-1 力矩分配法的基本概念
理论基础:位移法; 理论基础:位移法;
力矩分配法
计算对象:杆端弯矩; 计算对象:杆端弯矩; 计算方法:逐渐逼近的方法; 计算方法:逐渐逼近的方法; 适用范围:连续梁和无侧移刚架。 适用范围:连续梁和无侧移刚架。
1、名词解释 、
转动刚度S ⑴ 转动刚度 : 表示杆端对转动的抵抗能力。 表示杆端对转动的抵抗能力。 仅使杆端发生单位转动时需在杆端施加的力矩。 在数值上 = 仅使杆端发生单位转动时需在杆端施加的力矩。
SAB=4i
1
SAB=3i
1
SAB=i
1
SAB=0
SAB :与杆的线刚度 i(材料的 、横截面的 、杆长)及 远端支承有关, (材料的E、横截面的I、杆长) 远端支承有关,
龙驭球《结构力学Ⅰ》(第4版)笔记和课后习题(含考研真题)详解(渐进法及其他算法简述)【圣才出品】

第8章渐近法及其他算法简述8.1 复习笔记本章介绍了几种属于位移法类型的渐近方法。
这些渐近方法的基础是力矩分配法,在力矩分配法的基础上,衍生出了适用于不同结构类型的子方法,如无剪力分配法、分层计算法、反弯点法。
渐近法舍弃了一部分精度,但以此换来了更高的效率。
一、力矩分配法的基本概念(见表8-1-1)1.转动刚度、分配系数、传递系数表8-1-1 力矩分配法的基本概念2.基本运算环节(单结点转动的力矩分配)(见表8-1-2)表8-1-2 单结点转动的力矩分配图8-1-1图8-1-2二、多结点的力矩分配(见表8-1-3)表8-1-3 多结点的力矩分配图8-1-3三、无剪力分配法(表8-1-4)表8-1-4 无剪力分配法图8-1-4四、近似法(见表8-1-5)表8-1-5 近似法图8-1-5 分层法五、超静定结构各类解法的比较和合理选用(见表8-1-6)表8-1-6 超静定结构各类解法的比较和合理选用8.2 课后习题详解8-1 试用力矩分配法计算图8-2-1所示结构,并作M图。
图8-2-1解:(a)求固端弯矩M AB F=-F P l/8=-20kN·m,M BA F=F P l/8=20kN·m求分配系数μBA=EI/(EI+EI/2)=1/(1+1/2)=0.667,μBC=(EI/2)/(EI+EI/2)=(1/2)/(1+1/2)=0.333放松B点进行力矩分配(B点的集中力偶应该与固端弯矩一起分配),分配过程如图8-2-2所示,并作出M图如图8-2-2所示。
图8-2-2(b)考虑去掉悬臂部分CD,去掉后在C点施加大小为10kN·m的顺时针力偶矩。
求固端弯矩(注意,C点的附加力偶传递到B点的作用不能忽略)M BC F′=-3F P l/16=-18kN·m(集中力引起)M BC F″=1/2×10kN·m=5kN·m(附加力偶引起)M BC F=M BC F′+M BC F″=-13kN·m,M CB F=10kN·m。
第九章 渐进法

(successive appoximation method)
渐进法又称为力矩分配法是基于位 移法的逐步逼近精确解的近似方法。 从数学上说,是一种异步迭代法。 力矩分配法单独使用时只能用于无 侧移(线位移)的结构。
力矩分配法基本思想
以图示具体例子加以说明 按位移法求解时,可得下页所示结果
解: 3 EI S BA = 3 × = EI 10 10 EI S BC = 5 0.3 EI μ BA = = 0.6 (0.3 + 0.2) EI 0.2 EI μ BC = = 0.4 (0.3 + 0.2) EI
100kN .m
A
100kN .m
EI
B
EI
C
10m
5m
100
50
μ
M F − 100
M
A
EI1 l1
C
EI 2 l2
B
r11 = 4i1 + 3i2
R1P = − M
M
i1 = EI1 / l1 i2 = EI 2 / l 2 B A C l2 l1
Z 1 = M /( 4i1 + 3i2 )
M CA = M × 4i1 /( 4i1 + 3i2 ) M CB = M × 3i2 /( 4i1 + 3i2 ) M AC = M CA × 2i1 / 4i1
M
例3
20kN / m 40kN .m
求不平衡力矩
A
EI
B
EI
C
6m
20kN / m
4m
40kN .m
60
A
60
B
40kN.m
u MB
渐进hash 原理

渐进哈希(Progressive Hashing)的基本原理渐进哈希是一种用于处理大数据集的哈希算法,它将数据分块进行哈希计算,并循序渐进地生成最终哈希值。
在处理大数据集时,渐进哈希算法可以提高哈希计算的效率和速度,并且能够在数据流式处理中实时生成哈希值。
渐进哈希的基本原理包括以下几个步骤:1.分块:将待哈希的数据按照固定大小(通常是512比特)进行分块。
如果数据长度不能被块大小整除,则最后一个块可以是不完整的。
2.初始化:选择一个合适的哈希函数,并初始化哈希算法所需要的参数。
这些参数可以是初始哈希值、轮数、初始密码和密钥等。
3.消息扩展:对每个分块进行消息扩展。
消息扩展是通过将当前分块与上一个分块的哈希值进行异或运算得到的。
4.轮迭代:对消息扩展后的分块进行多轮迭代计算,以生成更复杂的哈希值。
每一轮迭代都会通过哈希函数和密钥来对当前分块进行变换。
5.哈希合并:在每轮迭代之后,将当前分块的哈希值与上一轮迭代的哈希值进行合并。
合并的方式可以是异或、加法、或者其他逻辑运算。
6.生成结果:在处理完所有的分块后,将最后一块的哈希值作为最终的哈希结果。
渐进哈希的主要优势是能够在处理大数据集时减少计算量和内存消耗。
由于数据被分块处理,渐进哈希可以进行流式处理,即数据可以一块一块地产生而不需要全部加载到内存中。
同时,渐进哈希可以在数据流经过的过程中实时生成哈希值,这在实时应用和流式处理中非常有用。
渐进哈希的应用场景渐进哈希算法广泛应用于以下场景:1.大数据处理:在处理大数据集时,传统的哈希算法可能会遇到内存不足和计算量大的问题。
而渐进哈希通过分块处理和流式计算的方式,能够有效降低内存和计算资源的需求。
2.实时应用:渐进哈希算法能够在数据流经过的过程中实时生成哈希值,使得实时应用能够及时获取处理结果。
例如,在网络流量监控中对数据流进行哈希可以用于判断是否有恶意攻击。
3.数据验证:通过对数据的哈希值进行比对,可以验证数据的完整性和一致性。
五大常用算法简介

五⼤常⽤算法简介1、递归与分治递归算法:直接或者间接不断反复调⽤⾃⾝来达到解决问题的⽅法。
这就要求原始问题可以分解成相同问题的⼦问题。
⽰例:阶乘、斐波纳契数列、汉诺塔问题斐波纳契数列:⼜称黄⾦分割数列,指的是这样⼀个数列:1、1、2、3、5、8、13、21、……在数学上,斐波纳契数列以如下被以递归的⽅法定义:F1=1,F2=1,Fn=F(n-1)+F(n-2)(n>2,n∈N*))。
分治算法:待解决复杂的问题能够简化为⼏个若⼲个⼩规模相同的问题,然后逐步划分,达到易于解决的程度。
1、将原问题分解为n个规模较⼩的⼦问题,各⼦问题间独⽴存在,并且与原问题形式相同2、递归的解决各个⼦问题3、将各个⼦问题的解合并得到原问题的解⽰例:棋盘覆盖、找出伪币、求最值棋盘覆盖:在⼀个(2k)*(2k)个⽅格组成的棋盘上,有⼀个特殊⽅格与其他⽅格不同,称为特殊⽅格,称这样的棋盘为⼀个特殊棋盘。
要求对棋盘的其余部分⽤L型⽅块填满2、动态规划动态规划与分治法相似,都是组合⼦问题的解来解决原问题的解,与分治法的不同在于:分治法的⼦问题是相互独⽴存在的,⽽动态规划应⽤于⼦问题重叠的情况。
动态规划⽅法通常⽤来求解最优化问题,这类问题可以有很多可⾏解,每个解都有⼀个值,找到具有最优值的解称为问题的⼀个最优解,⽽不是最优解,可能有多个解都达到最优值。
设计动态规划算法的步骤:1、刻画⼀个最优解的结构特征2、递归地定义最优解的值3、计算最优解的值,通常采⽤⾃底向上的⽅法4、利⽤算出的信息构造⼀个最优解⽰例:0-1背包问题,钢条切割问题等。
3、贪⼼算法贪⼼算法是就问题⽽⾔,选择当下最好的选择,⽽不从整体最优考虑,通过局部最优希望导致全局最优。
贪⼼算法的要素1)贪⼼选择性质:可以通过局部最优选择来构造全局最优解。
换⾔之,直接做出在当前问题中看来最优的选择,⽽不必考虑⼦问题的解。
2)最优⼦结构:⼀个问题的最优解包含其⼦问题的最优解。
10种机器学习算法介绍

线性回归
针对线性回归容易出现欠拟合的问题,采取局部加权线性回归。
在该算法中,赋予预测点附近每一个点以一定的权值,在这上面基于波长函数来进行普通的线
性回归.可以实现对临近点的精确拟合同时忽略那些距离较远的点的贡献,即近点的权值大,远 点的权值小,k为波长参数,控制了权值随距离下降的速度,越大下降的越快。
缺点:
(1) SVM算法对大规模训练样本难以实施
(2) 用SVM解决多分类问题存在困难
经典的支持向量机算法只给出了二类分类的算法,而在数据挖掘的实际应用中,一般要解决多类 的分类问题。
朴素贝叶斯
#Import Library from sklearn.naive_bayes import GaussianNB #Assumed you have, X (predictor) and Y (target) for training data set and x_test(predictor) of test_dataset # Create SVM classification object model = GaussianNB() # there is other distribution for multinomial classes like Bernoulli Naive Bayes, Refer link # Train the model using the training sets and check score model.fit(X, y) #Predict Output predicted= model.predict(x_test)
终止树
(1)节点达到完全纯性; (2)树的深度达到用户指定的深度; (3)节点中样本的个数少于用户指定的个数; (4) 异质性指标下降的最大幅度小于用户指定的幅度。
数学物理方法概论之——渐进方法
§ 3 渐近方法
3) 量级小于
若x x0时,f (x) / g(x) 0,则记f (x) o(g(x))
例: x 0, tan(x3) o(x2 ),
x , 对n 0, xn o(ex )
f (x) O(1) 的意义是说 f (x)有界,而f (x) o(1) 义是说f (x)趋于零。
§ 3 渐近方法
获得积分 渐近展式的
一、 逐项积分法: 瓦特森引理:设
方法有两种 (1)F (t) f (ta )tb , a 0,b 1;
(1)把被积函数 (2) f (x)对 | x | 有麦克劳林展式;
的一部分展 (3)t 时, 存在常数M 和C,| F (t) | Mect ;
§ 3.2 渐近展开
§ 3 渐近方法
六、 幂函数的展
式
wn (z) (z z0 )n, n 0,1, 2, , 在D 中,
若当z → z0,对每一个N 有:
N
f (z) an (z z0 )n o[(z z0 )n ]
N
n0
则: an (z z0 )n 是D中,z z0 时,f (z)
的
n0
一个渐近
幂级数展式,f (z记) 为 N an (z z0 )n z z0 n0
其中一种重要的特殊情形是在D中,当z0 时,如
果
f (z)
N n0
an zn
o(zn )
则在D中,当 z 时
f
(z)
~
N n0
an zn
§ 3.3 渐近展式的运算
例: n , Pn (x) O(xn ),
渐进网格简化模型的改进算法

0引言三维造型的主要方法是网格模型,复杂的多边形网格模型给计算机的分析、显示、存储与传输带来很大的负担,而网格简化是提高计算机处理复杂模型速度的有效方法。
近年来,有关三维网格简化算法的研究越来越热门[1]。
比如,Hoppe 提出的渐进网格(progressive mesh ,PM )算法,Garland 在1997年提出了二次误差测度的边折叠方法,Schroeder 提出基于点删除的三角网格模型简化方法,Turk 给出基于重新划分的多边形网格模型简化方法等[2,4-5]。
在这些算法中,PM 算法是应用最为广泛的一种。
PM 的思想很简单,它不仅在网格简化和数据量,压缩方面都十分有效,而且为建立多分辨率模型提供了极大的方便[1]。
许多现有的方法都是建立在此基础之上的。
本文分析了渐进网格模型,并且针对渐进网格在简化和重建的过程中,各边权值计算的不准确,以及不能很好的消除各个块之间的裂缝等方面的不足,对渐近网格模型进行了一些改进。
1相关技术1.1三角形网格的表示方法三角形网格的主要组成要素有顶点和面(三角形)。
顶点记录了表面上各点的空间坐标,而三角形的组合决定着各个表面总的拓扑形态结构[3]。
对于顶点v ,需要记录它的空间三维坐标,另外还保存了与该点邻接的三角形集合,称二元组(v,f )为一个corner 。
这里的f 是一个与v 相邻的三角形。
与顶点v 相邻的三角形表示为v.corners ,称作v 的邻域。
而三角形结构简单很多,其中仅存放了该三角形3个顶点的索引号。
定义了上述结构之后,三角网格的结构就变的很简单了,只需要用一个顶点序列和一个三角形序列即可描述一个网格模型。
三角形网格顶点的结构如图1所示。
1.2渐进网格的原理渐进算法是一种迭代收缩算法,利用一系列边收缩将原始网格(用M 表示)的分辨率逐级降低,最后得到一个比较粗糙的简化网格(用M 0表示)和对应各个边收缩的一系列细节信收稿日期:2007-10-08E-mail :*******************作者简介:谷冬冬(1982-),男,河南临颍人,硕士研究生,研究方向为信息管理系统、多媒体技术;潘正运(1940-),男,河南新乡人,教渐进网格简化模型的改进算法谷冬冬,潘正运(解放军信息工程大学电子技术学院,河南郑州450004)摘要:渐进网格模型可以用于层次细节的实现、三维网格的简化及重建等。
渐进时间复杂度的计算

渐进时间复杂度的计算\时间复杂度计算首先了解一下几个概念。
一个是时间复杂度,一个是渐近时间复杂度。
前者是某个算法的时间耗费,它是该算法所求解问题规模n的函数,而后者是指当问题规模趋向无穷大时,该算法时间复杂度的数量级。
当我们评价一个算法的时间性能时,主要标准就是算法的渐近时间复杂度,因此,在算法分析时,往往对两者不予区分,经常是将渐近时间复杂度T(n)=O(f(n))简称为时间复杂度,其中的f(n)一般是算法中频度最大的语句频度。
此外,算法中语句的频度不仅与问题规模有关,还与输入实例中各元素的取值相关。
但是我们总是考虑在最坏的情况下的时间复杂度。
以保证算法的运行时间不会比它更长。
常见的时间复杂度,按数量级递增排列依次为:常数阶O(1)、对数阶O(log2n)、线性阶O(n)、线性对数阶O(nlog2n)、平方阶O(n^2)、立方阶O(n^3)、k次方阶O(n^k)、指数阶O(2^n)。
1. 大O表示法定义|设一个程序的时间复杂度用一个函数T(n) 来表示,对于一个查找算法,如下:int seqsearch( int a[], const int n, const int x){int i = 0;for (; a[i] != x && i < n ; i++ );if ( i == n) return -1;else return i;}这个程序是将输入的数值顺序地与数组中地元素逐个比较,找出与之相等地元素。
在第一个元素就找到需要比较一次,在第二个元素找到需要比较2次,……,在第n个元素找到需要比较n次。
对于有n个元素的数组,如果每个元素被找到的概率相等,那么查找成功的平均比较次数为: f(n) = 1/n (n + (n-1) + (n-2) + ... + 1) = (n+1)/2 = O(n)这就是传说中的大O函数的原始定义。
用大O来表述要全面分析一个算法,需要考虑算法在最坏和最好的情况下的时间代价,和在平均情况下的时间代价。
渐进时间复杂度的计算

时间复杂度计算首先了解一下几个概念.一个是时间复杂度,一个是渐近时间复杂度。
前者是某个算法的时间耗费,它是该算法所求解问题规模n的函数,而后者是指当问题规模趋向无穷大时,该算法时间复杂度的数量级。
当我们评价一个算法的时间性能时,主要标准就是算法的渐近时间复杂度,因此,在算法分析时,往往对两者不予区分,经常是将渐近时间复杂度T(n)=O(f(n))简称为时间复杂度,其中的f(n)一般是算法中频度最大的语句频度。
此外,算法中语句的频度不仅与问题规模有关,还与输入实例中各元素的取值相关。
但是我们总是考虑在最坏的情况下的时间复杂度。
以保证算法的运行时间不会比它更长。
常见的时间复杂度,按数量级递增排列依次为:常数阶O(1)、对数阶O(log2n)、线性阶O(n)、线性对数阶O(nlog2n)、平方阶O(n^2)、立方阶O(n^3)、k 次方阶O(n^k)、指数阶O(2^n).1. 大O表示法定义设一个程序的时间复杂度用一个函数 T(n) 来表示,对于一个查找算法,如下:int seqsearch( int a[], const int n, const int x){int i = 0;for (; a[i] != x && i < n ; i++ );if ( i == n) return —1;else return i;}这个程序是将输入的数值顺序地与数组中地元素逐个比较,找出与之相等地元素。
在第一个元素就找到需要比较一次,在第二个元素找到需要比较2次,……,在第n个元素找到需要比较n次。
对于有n个元素的数组,如果每个元素被找到的概率相等,那么查找成功的平均比较次数为:f(n) = 1/n (n + (n-1) + (n-2) + ... + 1) = (n+1)/2 = O(n)这就是传说中的大O函数的原始定义。
用大O来表述要全面分析一个算法,需要考虑算法在最坏和最好的情况下的时间代价,和在平均情况下的时间代价。
渐进时间复杂度的计算
渐进时间复杂度的计算时间复杂度计算首先了解一下几个概念。
一个是时间复杂度,一个是渐近时间复杂度。
前者是某个算法的时间耗费,它是该算法所求解问题规模n的函数,而后者是指当问题规模趋向无穷大时,该算法时间复杂度的数量级。
当我们评价一个算法的时间性能时,主要标准就是算法的渐近时间复杂度,因此,在算法分析时,往往对两者不予区分,经常是将渐近时间复杂度T(n)=O(f(n))简称为时间复杂度,其中的f(n)一般是算法中频度最大的语句频度。
此外,算法中语句的频度不仅与问题规模有关,还与输入实例中各元素的取值相关。
但是我们总是考虑在最坏的情况下的时间复杂度。
以保证算法的运行时间不会比它更长。
常见的时间复杂度,按数量级递增排列依次为:常数阶O(1)、对数阶O(log2n)、线性阶O(n)、线性对数阶O(nlog2n)、平方阶O(n^2)、立方阶O(n^3)、k次方阶O(n^k)、指数阶O(2^n)。
1.大O表示法定义设一个程序的时间复杂度用一个函数T(n)来表示,对于一个查找算法,如下:int seqsearch( int a[], const int n, const int x) {int i = 0;for (; a[i] != x && i < n ; i++ );if ( i == n) return -1;else return i;}这个程序是将输入的数值顺序地与数组中地元素逐个比较,找出与之相等地元素。
在第一个元素就找到需要比较一次,在第二个元素找到需要比较2次,……,在第n个元素找到需要比较n次。
对于有n个元素的数组,如果每个元素被找到的概率相等,那么查找成功的平均比较次数为: f(n) = 1/n (n + (n-1) + (n-2) + ... + 1) = (n+1)/2 = O(n)这就是传说中的大O函数的原始定义。
用大O来表述要全面分析一个算法,需要考虑算法在最坏和最好的情况下的时间代价,和在平均情况下的时间代价。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第八章渐进法和力矩分配法超静定结构的计算方法: 力法(六)、位移法(七)力法计算步骤1、选取基本体系2、列力法方程3、计算系数及自由项4、解方程5、作内力图位移法计算步骤1、设基本未知量2、列杆端弯矩方程3、列位移法方程4、解方程5、求杆端弯矩6、做内力图为避免解力法和位移法方程,引入一种近似的计算方法,这种方法是位移法的延伸,在计算过程中进行力矩的分配与传递。
渐近法有力矩分配法、无剪力分配法等,它们都是位移法的变体,其共同的特点是避免了组成和解算典型方程,也不需要计算结点位移,而是以逐次渐近的方法来计算杆端弯矩,计算结果的精度随计算轮次的增加而提高,最后收敛于精确解。
力矩分配法适用于连续梁和无结点线位移的刚架;无剪力分配法适用于刚架中除杆端无相对线位移的杆件外,其余杆件都是剪力静定杆件的情况,它是力矩分配法的一种特殊的形式。
对于一般有结点线位移的刚架,可用力矩分配法和位移法联合求解。
§8.1 力矩分配法的基本概念力矩分配法:理论基础:位移法;计算对象:杆端弯矩;计算方法:逐渐逼近的方法;适用范围:连续梁和无侧移刚架。
基本概念转动刚度S分配系数μ传递系数 C力矩分配法中符号规定力矩分配法的理论基础是位移法,故力矩分配法中对杆端转角、弯矩及固端弯矩的正负号规定与位移法相同,即都假设对杆端顺时针旋转为正号、对结点或附加刚臂逆时针旋转为正号。
一、转动刚度S:表示杆端对转动的抵抗能力。
在数值等于使杆端产生单位转角时需要施加的力矩。
转动刚度SAB 与杆的线刚度i (材料的性质、横截面的形状和尺寸、杆长)及远端支承有关,而与近端支承无关。
二、分配系数设A 点有力矩M ,求M AB 、M AC 和M AD如用位移法求解:A AB A AB AB S i M θθ==4A AC A AC AC S i M θθ==A AD A AD AD S i M θθ==30=∑AM A AD AC ABS S SM θ)(++=∑=++=AAD AC AB A SMS S S M θ所以有M SS M AABAB ∑=M S S M AAC AC ∑= M S S M AAD AD ∑=M M Aj Aj ⋅=μ ∑=AAjAj SS μ 1=∑μ三、传递系数=远端弯矩/近端弯矩M AB = 4 i ABθAM BA = 2 i ABθA在结点上的外力矩按各杆分配系数分配给各杆近端截面,各杆远端弯矩分别等于各杆近端弯矩乘以传递系数。
单结点的力矩分配用力矩分配法计算连续梁和无侧移刚架计算步骤:第一,计算单跨超静定梁的固端弯矩;第二,计算结点处各杆端的弯矩分配系数;将不平衡弯矩(固端弯矩之和)反号后,在结点处按分配系数进行分配。
第三,计算各杆件由近端向远端传递的弯矩传递系数。
在各杆上按传递系数进行传递。
第四,将各杆的固端弯矩、分配弯矩、传递弯矩相加,即得各杆的最后弯矩。
作内力图。
【例】试用力矩分配法作图示连续梁的弯矩图。
§2 多结点的力矩分配1、原理与方法对于具有多个结点角位移但无结点线位移(简称无侧移)的结构,思路是,首先把所有结点锁住,然后依次逐个放松结点,使结构处于“单结点”状态,再使用力矩分配法消去结点上的不平衡力矩,如此反复进行,使结点不平衡力矩逐渐减小,直至可以忽略,因此,它是一种渐近法。
2、计算步骤(1)计算各结点的分配系数;(2)将所有中间结点固定,计算各杆固端弯矩;(3)将各结点轮流放松,分配与传递各结点的不平衡力矩,直到传递弯矩小到可忽略为止;(4)把每一杆端历次的分配弯矩、传递弯矩和原有的固端弯矩相加,即为各杆端的最后弯矩。
例.用力矩分配法列表计算图示连续梁。
力矩分配法小结:1)单结点力矩分配法得到精确解;多结点力矩分配法得到渐近解。
2)首先从结点不平衡力矩绝对值较大的结点开始。
3)结点不平衡力矩要变号分配。
4)结点不平衡力矩的计算:5)不能同时放松相邻结点(因定不出其转动刚度和传递系数),但可以同时放松所有不相邻的结点,以加快收敛速度。
例. 带悬臂杆件的结构的力矩分配法。
§3 对称结构的计算例、求矩形衬砌在上部土压力作用下的弯矩图。
k当竖柱比横梁的刚度大很多时(如i2>20i1),梁端弯矩接近于固端弯矩l2/12。
此时竖柱对横梁起固定支座的作用。
k当横梁比竖柱的刚度大很多时(如i1>20i2),梁端弯矩接近于零。
此时竖柱对横梁起铰支座的作用。
k由此可见:结构中相邻部分互为弹性支承,支承的作用不仅决定于构造作法,也与相对刚度有关。
k如本例中只要横梁线刚度i1 超过竖柱线刚度i2的20倍时,横梁即可按简支梁计算;反之只要竖柱i2 超过横梁线刚度i1的20倍时,横梁即可按两端固定梁计算。
k§4 无剪力分配法1、概述1)两类刚架的区别在位移法中,刚架被分为无侧移刚架与有侧移刚架两类,它们的区别在位移法的基本未知量。
无侧移刚架——基本未知量只含结点角位移;有侧移刚架——基本未知量既含结点角位移,也含结点线位移。
2)两类解法的用途力矩分配法——求解无侧移刚架的渐近法;无剪力分配法——求解符合某些特定条件的有侧移刚架的渐近法。
2、无剪力分配法的应用条件1)两种杆件的概念无侧移杆件——杆件两端没有相对线位移(即没有垂直杆轴的相对位移)的杆件;剪力静定杆件——杆件两端虽有侧移,但剪力是静定的,即可根据静力平衡条件直接求出剪力的杆件。
2)无剪力分配法应用条件适用于刚架中除两端无相对线位移的杆件(无侧移杆)外,其余杆件都是剪力静定杆件的有侧移刚架。
可以解只有一根竖柱的刚架,且横梁端部的链杆应与柱平行的问题。
但也可以推广到单跨多层对称刚架等问题。
对图示有侧移刚架,则不能直接应用无剪力分配法。
因竖柱AB、CD既不是两端无线位移杆件,也不是剪力静定杆件,不符合无剪力分配法的应用条件。
单层单跨刚架上面两个过程主要讨论剪力静定杆件的变形和受力特点。
(1)求剪力静定杆的固端弯矩时,先由平衡条件求出杆端剪力;将杆端剪力看作杆端荷载,按该端滑动,远端固定杆件计算固端弯矩。
(2)剪力静定杆件的转动刚度S=i;传递系数C=-1。
(3)AC杆的计算与以前一样。
1、剪力静定杆的固端弯矩:求剪力静定杆的固端弯矩时先由平衡条件求出杆端剪力;将杆端剪力看作杆端荷载,按该端滑动,另端固定的杆计算固端弯矩。
2、剪力静定杆的转动刚度和传递系数:剪力静定杆的S= i C=-1§ 5 力矩分配法与位移法联合应用•有侧移时,与位移法联合,解部分方程。
•步骤:1、加侧向线位移约束•2、力矩分配法作M p图,求荷载约束力F1p•3、给定单位侧向线位移,用力矩分配法求单位位移约束力K11•4、剪力位移法方程,求位移•5、叠加法作内力图§8 超静定力的影响线(自学)首先复习一下静定结构影响线的制作。
图示一简支梁,要作k点的弯矩影响线,其步骤是:1)让单位力在k点的左侧移动,写出k点弯矩的影响线方程:M k=xb/L2)让单位力在k点的右侧移动,写出k点弯矩的影响线方程:M k=xa/L3)由影响线方程,用描点法画出影响线。
对于超静定结构的影响线从理论上讲,可以完全按静定结构的方法及步骤进行。
例如图示一超静定梁作k点的弯矩影响线,其步骤是:1)让单位力在k点的左侧移动,写出k点弯矩的影响线方程;2)让单位力在k点的右侧移动,写出k点弯矩的影响线方程;3)由影响线方程,用描点法画出影响线。
但是上述写影响线方程的过程,均需用力法求解超静,因此工作量特别大。
下面介绍用力法来制作超静定结构影响线,为此先要建立一个概念:力法的基本体系可以取超静定的.图示一两次超静定梁,可以去掉一个约束,取图示的基本体系,它是一次超静定的,力法方程为:11110 PXδ+∆=但是求系数和自由项时,要在基本体系上画弯矩图,因此需要解两遍“一次超静定结构”。
以图示超静定连续梁MK 的影响线为例,说明用力法求作超静定影响线的方法。
1)取基本体系(超静定、几何不变体系)——去掉与MK 相应的约束,代之以(暴露出来的)约束反力XK2)力法方程由于荷载是单位力,因此:又由位移互等定理:力法方程可写成:--在Xk=1作用下,k 点处的相对转角,是常数。
--在Xk=1作用下,P 点处的竖向位移,由于单位力可以在梁上任意移动,因此它是整个梁的挠度,是变量。
力法方程可写成:由上式可见:X K 与 成正比,Xk(x)即为影响线方程。
因此 作用下,基本体系产生的挠曲线即为 影响线的轮廓线.下面分两部分介绍:1)绘制超静定结构影响线的大致图形;2)绘制超静定结构影响线的精确图形。
kP kP δ∆=kP Pk δδ=Pk k kk X δδ=-kk δPk δ()()Pkk kk x X x δδ=-1、绘制超静定结构影响线的大致图形步骤如下:(1)撤去所求量值的相应约束,代之以多余力XK,得到一个n-1次超静定的基本体系;(2)使体系沿X1方向发生位移,作出荷载作用点的挠度图,即为影响线形状。
(3)在 图中令 即为影响线数值(4)横坐标以上图形为正号,横坐标以下图形为负号2、绘制超静定结构影响线的精确图形步骤如下:(1)撤去所求量值的相应约束,代之以多余力XK,得到一个n-1次超静定的基本体系;(2)建立力法方程,由于只有一个多余力,力法方程为:即为影响线方程;kk k kP X δ+∆=。