三点拟合圆心计算
基于三点迭代的聚类圆拟合算法
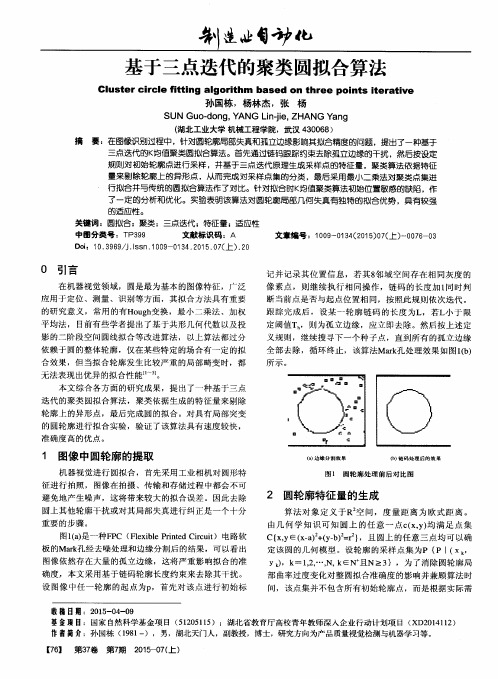
定 阂值 T ,则 为孤 立边 缘 ,应 立 即去 除 。然 后按 上 述 定
迭代 的聚类 圆拟 合 算法 ,聚类 依据 生 成 的特征 量 来剔 除 轮廓 上 的异 形 点 ,最后 完 成 圆的拟 合 。对 具有 局 部突 变
的 圆轮 廓进 行拟 合 实验 ,验 证 了该 算 法具 有速 度 较快 ,
准确 度 高 优 点 。
1 图像 中圆轮廓 的提取
机 器 视觉 进行 圆拟合 ,首先 采 用工业 相 机 对 圆形特 征 进行 拍 照 , 图像 在 拍摄 、传 输 和存 储 过程 中都会 不可
了一定 的分析和优 化。 实验 表明该算 法对 圆轮廓局 部几何 失真有独特 的拟合优 势 ,具有 较强
的适应性。
关键词 :圆拟合 ;聚类 ;三点迭代 ;特征量 ; 适应性 中图分类号 :T P 3 9 9 文献标识码 :A
Oo i :1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 -0 1 3 4 . 2 0 1 5 . 0 7 (I - ). 2 0
摘
( 湖北工业大学 机械 工程学院 ,武汉 4 3 0 0 6 8 ) 要: 在 图像识别过程 中 ,针对圆轮廓局部失真和孤立边缘影 响其拟合精度的问题 ,提出了一种基于
三点迭代的K 均值聚类圆拟合算法。首先通过链码跟踪约束去除孤立边缘的干扰 ,然后按设定
规 则对 初始轮廓点 进行采样 ,并基 于三点迭 代原理生 成采样 点的特征 量 ,聚类 算法依 据特征 量来剔 除轮廓上的 异形点 ,从而完成 对采样 点集的分 类 ,最 后采用最 小二乘法 对聚类 点集进 行 拟合并与传统 的圆拟合算法作 了对 比。针对拟合 I ] - , J K 均值 聚类算法初始位置 敏感的缺陷 ,作
空间三点 求圆方程 matlab

空间三点求圆方程matlab一、引言在空间几何学中,我们经常需要根据给定的三点坐标来求解出对应的圆方程。
而在数学软件matlab中,我们可以利用其强大的计算能力和编程能力来实现这一过程。
本文将介绍如何利用matlab来求解空间三点的圆方程。
二、圆方程的一般形式空间中的圆可以由其一般形式的方程表示:(x - a)^2 + (y - b)^2 + (z - c)^2 = r^2其中(a, b, c)为圆心坐标,r为半径。
三、空间三点求圆方程的步骤1. 输入三个点坐标我们首先需要输入三个空间点的坐标,假设这三个点分别为A(x1, y1, z1),B(x2, y2, z2),C(x3, y3, z3)。
利用数学公式可以求解出圆心坐标(a, b, c):a = (x1 + x2) / 2b = (y1 + y2) / 2c = (z1 + z2) / 23. 求解圆半径利用欧式距离公式可以求解出圆半径r:r = sqrt((x1 - a)^2 + (y1 - b)^2 + (z1 - c)^2)4. 求解圆方程将圆心坐标和圆半径代入圆的一般形式方程,即可得到圆的具体方程。
四、matlab代码实现接下来,我们将用matlab代码来实现空间三点求圆方程的过程:```matlab输入三个点坐标x1 = 1; y1 = 2; z1 = 3;x2 = 2; y2 = 3; z2 = 4;x3 = -1; y3 = -2; z3 = -3;a = (x1 + x2) / 2;b = (y1 + y2) / 2;c = (z1 + z2) / 2;求解圆半径r = sqrt((x1 - a)^2 + (y1 - b)^2 + (z1 - c)^2);求解圆方程fprintf('圆的具体方程为:(x - .2f)^2 + (y - .2f)^2 + (z - .2f)^2= .2f\n', a, b, c, r^2);```五、示例与结果解析我们输入以上示例的三个点坐标,经过matlab计算得到的圆方程为:(x - 1)^2 + (y - 2)^2 + (z - 3)^2 = 7.00这便是通过matlab计算得到的空间三点的圆方程。
三点拟合圆机械手旋转中心标定

一、背景介绍1. 三点拟合圆机械手在工业自动化领域有着广泛的应用,其旋转中心的准确定位对于机械手的运动轨迹和精度具有至关重要的影响。
2. 三点拟合圆是一种常用的测量方法,通过测量三个非共线的点确定一个圆的圆心和半径,可以用于定位和校准旋转中心。
3. 机械手的旋转中心标定是一项复杂的工程,需要借助专业的设备和精密的算法来完成。
二、旋转中心标定的意义1. 机械手的旋转中心标定是确保机械手运动准确性和精度的关键一步,对于提高生产效率和产品质量具有重要意义。
2. 准确的旋转中心标定可以保证机械手在工作中的稳定性和可靠性,避免由于旋转中心偏移导致的装配和加工误差。
3. 合理的旋转中心标定可以提高机械手的运动精度,减小机械手运动轨迹的误差,提高生产线的整体效率和生产能力。
三、三点拟合圆机械手旋转中心标定的原理1. 三点拟合圆需要通过测量三个非共线的点来确定旋转中心的位置,这三个点可以通过机械手上的测量工具或者外部测量设备获取。
2. 通过测量获得的数据,可以利用数学计算和拟合算法来求解出旋转中心的位置和旋转半径,从而实现机械手旋转中心的准确定位。
3. 在实际标定过程中,需要考虑到测量误差的影响以及机械手本身的结构特点,采用合适的算法和校准方法才能达到较高的标定精度。
四、三点拟合圆机械手旋转中心标定的关键技术1. 数据采集技术:包括机械手上的测量传感器、外部测量设备等,需要确保所采集的数据准确可靠。
2. 拟合算法:通过数学计算和拟合算法来对所采集的数据进行处理,求解出旋转中心的位置和旋转半径。
3. 校准方法:根据机械手的实际结构和运动特点,选择合适的校准方法,包括静态标定、动态标定等。
五、三点拟合圆机械手旋转中心标定的实际应用1. 工业机械手:在自动化装配线、焊接生产线等领域中,机械手的旋转中心标定可以保证产品装配的精度和焊接的质量。
2. 三维测量设备:利用三点拟合圆机械手旋转中心标定技术,可以提高三维测量设备的测量精度和稳定性。
matlab三点定圆公式

matlab三点定圆公式Matlab是一种常用的科学计算软件,它在各个领域都有广泛的应用。
在几何学中,Matlab提供了一种称为"三点定圆"的方法,用于确定三个已知点构成的圆的圆心和半径。
本文将介绍这个方法的基本原理和使用步骤。
我们先了解一下"三点定圆"方法的原理。
假设我们已知三个点A(x1, y1)、B(x2, y2)和C(x3, y3),我们的目标是确定经过这三个点的圆的圆心和半径。
根据几何学的知识,我们知道,如果一个圆的圆心坐标为(x, y),半径为r,那么这个圆上任意一点P(x', y')到圆心的距离等于半径r,即:(x' - x)^2 + (y' - y)^2 = r^2我们可以将上述方程应用到已知的三个点A、B和C上,得到三个方程:(x1 - x)^2 + (y1 - y)^2 = r^2 (1)(x2 - x)^2 + (y2 - y)^2 = r^2 (2)(x3 - x)^2 + (y3 - y)^2 = r^2 (3)将方程(1)和(2)相减,得到:(x1 - x)^2 - (x2 - x)^2 + (y1 - y)^2 - (y2 - y)^2 = 0化简后得到:2x(x1 - x2) + 2y(y1 - y2) = x1^2 - x2^2 + y1^2 - y2^2 (4)同理,将方程(2)和(3)相减,得到:2x(x2 - x3) + 2y(y2 - y3) = x2^2 - x3^2 + y2^2 - y3^2 (5)现在,我们有了两个方程(4)和(5),我们可以通过求解这个方程组来得到圆的圆心坐标(x, y)。
在Matlab中,我们可以使用线性方程组求解函数"linsolve"来求解这个方程组,代码如下:```matlabA = [2*(x1-x2), 2*(y1-y2); 2*(x2-x3), 2*(y2-y3)];B = [x1^2-x2^2+y1^2-y2^2; x2^2-x3^2+y2^2-y3^2];X = linsolve(A, B);x = X(1);y = X(2);```这样,我们就得到了圆的圆心坐标(x, y)。
圆周上三点坐标计算圆心坐标

] 圆周上三点坐标计算圆心坐标.半径、圆面积Fx5800编程本程序为圆周上已知的三点坐标计算圆半径、圆心坐标、圆面积及弓形面积,希望大家共同学习并指点.谢谢了.用圆周上三点坐标计算圆半径、圆心坐标、圆面积及弓形面积CASIO(5800)计算程序3P-R-O-AREA 程序名Fix3:“XA=”? →A:“YA=”? →B:“XB=”? →C:“YB=”? →D:“XC=”? →E:“YC=”?→F↙↙∍ C-A→G:D-B→H:E-A→I:F-B→J:E-C→K:F-D→Ltan-1(J÷I) →X:I﹤0=﹥X+180→X ↙∍↙∍ tan-1(H÷G) →Y:G﹤0=﹥Y+180→Ytan-1(L÷K) →Z:K﹤0=﹥Z+180→Z ↙∍X-Y→M: M﹤0=﹥M+360→M :Z-X→N: N﹤0=﹥M+360→N :M+N→O↙∍(G^2+H^2)开平方→U: (K^2+L^2)开平方→V: (I^2+J^2)开平方→W:“R=”:W÷2÷sin(O) →R◢tan-1(H÷G) →Q:If G﹥0 ↙∍:Then Q+180→Q :Goto 1: IfEn dLb1: U÷2→S: (R^2+S^2)开平方→T ↙∍“X0=”:C+Scos(Q)+Tsin(Q) ◢“Y0=”:D+Ssin(Q)-Tcos(Q) ◢“CIRC-AREA(M2)=”:ΠR2→P◢(ROΠ)÷90→L:“BOW-AREA(M2)=”:R(L-Wcos(O)) ÷2◢∍“End”说明:输入显示:XA、YA、XB、YB、XC、YC 分别为圆周上已知的三点坐标值。
结果显示:R为圆半径; X0,Y0为所求的圆心坐标;“CIRC-AREA(M2)=”为圆面积;“BO W-AREA(M2)=”为所求的弓形面积。
三点圆方程公式

三点圆方程公式三点圆方程公式,这可真是个有点烧脑但又超级有趣的数学知识!咱们先来说说什么是三点圆方程公式。
简单来说,就是通过三个不在同一直线上的点,来确定一个圆的方程。
这就好像你和两个小伙伴手拉手围成一个圈,通过你们三个的位置,就能算出这个圈的大小和位置。
我想起之前给学生们讲这个知识点的时候,有个小家伙瞪着大眼睛,一脸迷茫地问我:“老师,这和我们生活有啥关系呀?”我笑着跟他们说:“你们想想看,建筑师在设计圆形的建筑时,是不是得先确定这个圆的方程,才能知道怎么搭建呀?还有你们喜欢的摩天轮,工程师也要用这个知识来保证它能稳稳地转起来呢!”要得到三点圆的方程,咱们得先设出圆的一般方程 x² + y² + Dx +Ey + F = 0 。
然后把这三个点的坐标分别代入这个方程,得到一个三元一次方程组,解出D、E、F 的值,就搞定啦!听起来是不是有点复杂?别担心,咱们多做几道题就熟练了。
比如说,给你三个点 A(1, 2) 、B(3, 4) 、C(5, 6) ,咱们就把它们分别代入方程,得到:\[\begin{cases}1 + 4 + D + 2E + F = 0 \\9 + 16 + 3D + 4E + F = 0 \\25 + 36 + 5D + 6E + F = 0\end{cases}\]然后通过解方程组,算出 D、E、F 的值,就能得到这个圆的方程啦。
在解题的过程中,可别粗心大意哦。
有时候一个小数字算错了,整个答案就都错啦。
我记得有一次,一个学生算得特别认真,草稿纸都写满了好几页,可最后还是错了,原因就是把一个数字的正负号给弄反了。
当时他那个懊恼的表情,别提多有意思了。
学会了三点圆方程公式,咱们就能解决好多实际问题啦。
比如说,在地图上有三个已知的地点,你想在这三个地点围成的区域中心建一个信号塔,那就要用到这个公式来确定信号塔的最佳位置。
总之,三点圆方程公式虽然有点小复杂,但只要咱们用心去学,多做练习,一定能掌握得妥妥的!就像咱们生活中的很多事情一样,一开始觉得难,只要坚持下去,就会发现其实也没那么难。
已知三点求圆的标准方程

已知三点求圆的标准方程全文共四篇示例,供读者参考第一篇示例:已知三个点求圆的标准方程是解析几何中一个常见且重要的问题。
在数学上,圆是一个平面上所有点到给定点的距离相等的集合。
而已知三个点,可以确定一个唯一的圆。
在求解三个已知点求圆的标准方程时,通常采用数学方法进行推导和计算。
下面将详细介绍求解这一问题的步骤和方法。
假设我们已知三个点A、B、C,它们的坐标分别为(x1, y1)、(x2, y2)、(x3, y3)。
我们要求解通过这三个点的圆的标准方程。
步骤一:确定圆的中心坐标我们需要确定圆的中心坐标。
已知三个点确定的圆一定是一个唯一的圆,因此这个圆的中心一定在三个已知点的垂直平分线的交点上。
具体地,我们可以根据两点确定一直线的斜率公式来计算出A和B 的垂直平分线的斜率,然后根据斜率求垂直线斜率的倒数得到垂直平分线的斜率。
利用已知的三点A、B、C,结合求出的垂直平分线的斜率和中点坐标,我们就可以确定圆的中心坐标。
接下来,我们需要确定圆的半径。
已知圆的中心坐标和任意一点坐标就可以确定一个圆,其余两点到圆心的距离一定等于圆的半径。
我们可以利用圆心坐标和其中一个点的坐标,来计算得到圆的半径。
步骤三:写出圆的标准方程我们已经确定了圆的中心坐标和半径,可以写出圆的标准方程。
圆的标准方程通常为:(x-a)^2 + (y-b)^2 = r^2a和b分别是圆的中心坐标的x坐标和y坐标,r是圆的半径。
通过以上步骤,我们可以得到通过三个已知点求圆的标准方程。
这个问题在几何分析中起到了重要的作用,不仅可以帮助我们理解圆的性质,还可以应用到解决实际问题中。
总结:已知三个点求圆的标准方程是解析几何中一个重要的问题,通过确定圆的中心坐标和半径,我们可以得到圆的标准方程。
这个问题展示了数学在几何中的应用,对于加深我们对圆的理解有很大帮助。
【字数不足,请问还需要继续增加内容吗?】第二篇示例:已知三点求圆的标准方程是解析几何学中的一个重要问题。
已知三点求圆的方程简便方法

已知三点求圆的方程简便方法
在数学中,我们需要知道如何通过三个已知点来确定一个圆的方程。
此操作在几何学中有广泛的应用,尤其是在计算机视觉和图像处
理中。
首先,我们需要知道一个基本的定理:圆心在三角形外心上。
这
个定理的证明是基于欧拉线的存在。
接下来,我们使用三点确定一条直线,然后求出这条直线的中垂线,它垂直于这条直线,并且经过直线上的中点。
这条中垂线的交点
就是三角形的外心,也就是我们所要找的圆心。
接下来,我们需要计算半径。
半径可以通过测量任意点到圆心的
距离来计算。
因此,我们可以通过选择任意一个已知点,并计算它到
圆心的距离来计算半径。
最后,我们需要写出圆的标准方程:$(x - a)^2 + (y - b)^2 =
r^2$,其中$(a,b)$是圆心的坐标,$r$为半径。
当然,这一过程可以用一个类似于奥卡姆剃刀的技巧来简化,即
使用向量和矩阵的方法。
我们可以将三个已知点表示为向量,然后构
建一个矩阵,通过它来求出圆心和半径。
这种方法基于线性代数的原理,具有更高的效率和适用性。
总之,通过三个已知点确定圆的方程是几何学中的一个基本问题,也是应用数学中的常见问题。
我们可以采用不同的技巧来解决这个问
题,包括基于欧拉线的方法和向量矩阵的方法。
掌握这些技巧可以帮助我们更好地理解几何学和应用数学。
过坐标轴上三点的圆的半径公式
过坐标轴上三点的圆的半径公式假设坐标轴上有三个点A(x1,0), B(x2,0)和C(x3,0)。
我们可以使用公式来计算这三个点形成的圆的半径。
首先,计算出三点之间的距离AB、AC和BC。
可以使用距离公式来计算:
AB的距离= √((x2 - x1)^2 + (0 - 0)^2) = √((x2 - x1)^2) AC的距离= √((x3 - x1)^2 + (0 - 0)^2) = √((x3 - x1)^2) BC的距离= √((x3 - x2)^2 + (0 - 0)^2) = √((x3 - x2)^2) 接下来,我们计算三个距离的平均值d:
d = (AB的距离+ AC的距离+ BC的距离) / 3
最后,计算圆的半径R:
R = d / √3
综上,计算过坐标轴上三点A(x1,0), B(x2,0)和C(x3,0)所形成
的圆的半径,首先计算出三个点之间的距离AB、AC和BC,然后计算出这三个距离的平均值d,最后使用公式R = d / √3计算出圆的半径R。
值得注意的是,以上公式仅适用于坐标轴上的三个点。
如果三个
点不在坐标轴上,我们需要使用更复杂的公式来计算圆的半径。
三坐标轮廓圆最佳拟合
三坐标轮廓圆最佳拟合说到“三坐标轮廓圆最佳拟合”,嗯,这个名字一听就感觉像是个高大上的数学课题,心里不免有点发虚。
不过别急,听我慢慢说。
其实这个问题,大家的日常生活中肯定碰到过。
比方说你拿着个圆规,瞄准纸上的一个点,开始画圈。
画得稳稳当当的,可是有时候发现圆并没有完美地贴合那些数据点。
就像你画个大饼,可饼上的陷下去的部分和凸起的地方,总是差那么一点。
那怎么办呢?这就是我们说的“拟合”了。
说到拟合,你可能会想:不是就是把数据弄得更像个圆吗?对!但是不只是弄成个圆,还得是最合适、最贴合的数据点的圆。
我们就得算算,哪些点离圆心最远,哪些点又特别贴心地在圆上,甚至能帮我们找出那个圆心在哪,圆的半径又多大。
你可以把它想象成你在做一个拼图,拼图的每一块就是数据,而你要做的就是找出最合适的拼法,把这些碎片拼成一个尽可能完美的圆。
这个问题的核心就是找到一个“最佳拟合”。
说简单点,就是在一堆散乱的点中找出一个最能代表所有点的大致形状。
就像你把一群不太相干的朋友凑在一起,大家站成一排,站得远近不一,宽窄不一,但你得让他们站成一条直线或一个圆圈,怎么站才最和谐,最让人看得舒服呢?这个过程,就是在调皮的点之间找到平衡,弄清楚他们的脾气,最后让它们乖乖地站成你想要的形状。
很多时候,我们做这个拟合的目标是为了优化设计。
比如,制造工厂可能要根据产品的三维轮廓来精确设计机器的动作。
想象一下,如果机器的刀头稍微跑偏,工件的轮廓就可能歪了,甚至产品的精度都可能不合格。
这个时候就需要精准的三坐标数据,这样机器才能根据数据做出调整。
又比如,做设备检测时,如果传感器收集的数据点没有在预期的圆形轨迹上,就得靠拟合技术把数据点调整到最佳位置,保证检测结果精准无误。
拟合的过程就像我们小时候画圆。
可能你刚开始画出来的圆,不够圆,甚至可能看起来有点歪。
然后你试着调整一下圆规的长度,调整画圆的手势,慢慢地,圆就越画越好。
这里的“调整”其实就像是在找数据的“最佳位置”。
三点坐标求圆的半径
三点坐标求圆的半径1. 引言在几何学中,我们经常需要求解圆的半径。
一种常见的方法是给定圆的三个点的坐标,通过计算来得到圆的半径。
本文将详细讨论如何根据三个点的坐标来求解圆的半径。
2. 圆的定义在开始讨论之前,让我们先来回顾一下圆的定义。
在平面几何中,圆是指与平面上一个确定点距离相等的所有点的集合。
圆由圆心和半径唯一确定。
3. 三点确定一个圆根据圆的定义,我们知道要确定一个圆需要知道圆心和半径。
给定三个点的坐标,我们可以通过计算来确定这个圆。
3.1 定义三个点假设我们有三个点A(x1, y1),B(x2, y2)和C(x3, y3),我们要求解以这三个点为圆上三点的圆的半径。
3.2 求解圆心坐标首先,我们需要求解圆的圆心坐标。
可以使用以下公式来计算圆心坐标:圆心x坐标 = (x1 + x2 + x3) / 3 圆心y坐标 = (y1 + y2 + y3) / 3这是因为圆的圆心是这三个点的重心。
3.3 求解半径确定了圆心坐标后,我们可以使用以下公式来计算半径:半径 = sqrt((x1 - 圆心x坐标)^2 + (y1 - 圆心y坐标)^2)其中,sqrt表示取平方根。
4. 实例演示让我们通过一个实际的例子来演示如何根据三个点的坐标求解圆的半径。
假设我们有三个点A(1, 1),B(5, 5)和C(9, 1)。
首先,我们可以计算出圆心的坐标:圆心x坐标 = (1 + 5 + 9) / 3 = 5 圆心y坐标 = (1 + 5 + 1) / 3 = 2.333然后,我们可以计算半径:半径 = sqrt((1 - 5)^2 + (1 - 2.333)^2) = sqrt(16 + 2.111) = sqrt(18.111) ≈ 4.26所以,给定三个点A(1, 1),B(5, 5)和C(9, 1),这三个点确定的圆的半径约为4.26。
5. 总结通过本文的讨论,我们了解了如何根据三个点的坐标来求解圆的半径。