玻璃搬运机器人38页PPT
第五章搬运机器人系统工作站(搬运工作站工业机器人的选型2)优质教学课件PPT

MESSI
外部设备控制机器人信号时序
MESSI
MESSI
5.3.4 安川MH6机器人的认识
(2)外部设备控制机器人伺服电源接通
MESSI
只有伺服接通信号的上升沿有效,所以在机器人伺服电 源接通后,必须取消伺服接通信号,为下一次重新接通伺服电 源做准各。
MESSI
CPU单元(JZNC-YRK01-1E)
MESSI
MESSI
5.3.4 安川MH6机器人的认识
MESSI
② CPU单元内的单元基板
a)控制基板(JANCD-YCPO1-E)。控制基板用于控制 整个系统、示教编程器上的屏幕显示、操作键的管理、操 作控制、插补运算等。它具有RS-232C串行接口和LAN接 口(100BASE-TX/10BASE-T)。
MESSI
CPS单元(JZNC-YRS01-E)
MESSI
MESSI
CPS单元(JZNC-YRS01-E)技术参数
MESSI
MESSI
5.3.4 安川MH6机器人的认识
MESSI
5) 断游叫器基板 (JANCD-YBK01-□E)。 断路器基板是根据从基本轴控制基板(SRDA-EAXA01□) 的指令信号,对机器人轴以及外部轴共计9个轴的断路器进行控 制,如下图所示。 6) I/O单元 (JZNC-YIU01-E)。 I/O单元 (JZNC-YIU01-E) 用于通用型数字输入输出,有4 个插头CN306~CN309,如下图所示。I/O单元共有输入/输出 点数40/40点,根据用途不同,有专用输人输出和通用输入输出 两种类型。
MESSI
5.3.4 安川MH6机器人的认识
玻璃基板搬运机器人的设计

( . c o lo c a ia gn eig 1 S h o fMe h nc l En i ern ,Dain U iest o e h oo y l nv ri f c n lg ,DainL a nn 6 2 a y T l io ig1 0 4;2 D n g a a 1 . o gu n
0 引 言
・
精度和高洁净度的特点。 1 玻 璃 基 板 搬 运 机 器 人 构 型 方 案 的确 定
目前 , P F D产业 中 玻 璃 基 板搬 运 机 器 人 常用 构 型 有 多关 节 型机 器 人 、 角 坐 标 型 机 器 人 和 圆柱 坐 标 型 直 机 器人 。多关 节型 机器人 通 常含 有 4~6个 自由度 ,
块 为例 , 转 矩 匹配和 转动 惯量 匹配两 个方 面校核 了电机 与 负载 的 匹配性 能 。验 证 结 果表 明 , 璃基 板 从 玻
搬运 机 器人 所选 电机 与 负载的 匹配 性 能 良好 , R向伸 缩模块 的 转动惯 量 具有 周期 性 变化 的规 律 。 且
关 键 词 : 璃 基 板 搬 运 机 器人 ; 块 ; 矩 匹 配 ; 动 惯 量 匹 配 玻 模 转 转 中 图 分 类 号 :G 5 ; P 4 T 69 T 2 文 献 标 识 码 : A
A w l Eet nc o t. D nw nD ng a 2 0 0 hn ) n e lc ois .Ld , o g a o gu n5 3 8 ,C ia l r C
A bsr c : The c m m o o fg r to fga s s s rt o t f rFPD r s us e ta t o n C n u a ins o ls ub ta e r bo o i a e dic s d,t yl rc lc o d - he c i ia o r i nd na er b t i deem ie .Ba e n t e de in a d r s ac fga s s bsr t a dl g r b t he f n to d t o o s tr n d s d o h sg n e e rh o ls u ta e h n i o o ,t u c in a n n m e h nia tu t r fR e pa son m o u e 0 r v l i gm o ul n l tn c a c ls r c u e o x n i d l , e o v d e a d Z i i g mod e a ea l n f ul r nayze A n a i g d. dtkn t e R x a in m o u e a x m pl,t ot rm a c i iu to ls u tae h n l g r b ti h c e h e p nso d l se a e hem o t hng st a in ofga s s bsr t a di o o s c e k d n fo hef l w ig t o a pe t : o q a c i d m o e to e tam a c ng T tr s ls s o t tm o o r m t ol n w s c s t r uem t hng a m n fi ri t hi . e e u t h w ha t r o n n s n o d m thi r o m n e ae pe f c ,a d t m nto n r a o e a d l a ac ng pe f r a c r re t n he m o e fi e i fR x a so o u e i ro i. t p n in m d l sPe i dc Ke y wor ds:ga s u ta e h dl g r bo ; o ul;t r u a c i g m o e t o e i a c i g ls s bsr t a i o t m d e o q e m t h n n n ; m n fi r a m t h n t n
智能循迹搬运机器人PPT课件

基于ARM系统的智能循迹搬运机器人
团队成员
指导老师:邵民
13机电1班 :文鸣 张军强 刘派派
13机电4班: 魏子明
.
1
智能循迹搬运机器人研究目的及意义
智能循迹搬运机器人(又称AGV小车)以ARM新一代嵌入式并行读 写操作部件为 控制核心,实现对小车的智能控制。此控制系统不仅在机器人中有很强的使用价值, 在汽车领域,智能家居等方面都有很高的是实用价值,尤其在智能机器人领域有很 高发展前景。所以本设计与实际相联系,具有很重要的意义。本机器人是由上海未 来伙伴公司提供新型机器人MF13以及我们的改造创新。
.
12
小组成员
零件组装:文鸣 魏子明
程序设计: 张军强 刘派派
.
13
谢谢各位老师!
.
14
本设计结构简单,调试方便,系统反映快速灵活,硬件电路由可拆卸模 块拼接而成有很大的扩展空间。经实验测试,该智能小车设计方案正确、 可行,各项指标稳定、可靠。虽然智能小车系统有很多优点,但在设计当 中也存在着一些不足。如光电开关受光线影响,没有很好的解决措施,所 以在使用中需要注意环境影响,由于没采用双电源供电,使系统的抗干扰 性还是欠佳,红外循线部分还可以使用红外对管ST178,可以更加好的隔 绝光线的干扰,使小车更加稳定行走。
.
8
基于ARM系统循线程序原理图
.
9
执行机构
行星减速电机调速稳定 采用大轮胎运行速度更快 更加稳定
机械爪
AGV搬运机器人课件.doc
AGV搬运机器人1.了解AGV搬运车随着科技水平的迅猛发展,许多高科技产品也在不断地发生质的变化,特别是工厂应用中,搬运车的进步就更加体现了人类的智慧,更是加速了工业化的发展。
所谓搬运车,就是搬运货物作用的物流设备,又叫托盘车,常见于工厂或仓库中物料的搬运。
搬运车分为手动搬运车,半自动搬运车以及全自动搬运车。
手动搬运车在使用时将其承载的货叉插入托盘孔内,由人力驱动液压系统来实现托盘货物的起升和下降,并由人力拉动完成搬运作业,是托盘运输中最简便,最有效,最常见的装卸,搬运工具。
如今最常用的搬运车,AGV,经过数次的改造与优化,已经大大的促进了工厂里的工作效率,节省了人力,同时也应用到更多其他领域,包括医院,实验室等操作场所。
AGV意为无人引导小车,指装有自动引导装置,能够沿规定的路径行驶,在车体上具有编程和车体选择装置,安全保护装置以及各种物料移载功能的搬运车辆。
根据美国物流协会定义,AGV是指备有电磁或光学引导装置,能够按照规定的导引路线行驶,具有小车运行和停车装置,安全保护装置以及具有各种移载功能的运输小车。
米-克-力-美-科-技2.与传统搬运车的比较传统搬运车界面操作复杂,按钮多,非专业人员很难在短时间内学会并控制好搬运车的移动与运货作业。
而现代的智能AGV搬运小车,采用了安卓控制系统,操作人员无需培训,只要会玩手机就能操作AGV小车的移动与搬运作业。
界面简洁明了,美观大方,更是工业制造中的好帮手。
传统搬运车,按钮多。
智能AGV小车,安卓界面,简洁明了。
传统的搬运小车大多采用红外线障碍物检测,无法做到全范围检测,存在大量盲区。
红外线检测会受光线,温度,颜色的干扰,因此造成检测结果的不精确性。
一旦检测到有障碍物,会停止工作,直到障碍物排除,这在一定程度上降低了车间工作的效率。
而智能AGV 采用自动避障物测距系统,可根据障碍物距离进行多级减速缓冲停车,智能AGV实时量化测量障碍物距离,而非传统AGV的探测障碍物后产生的开关信号。
机械手搬运ppt

整个搬运机构能完成四个自由度动作,手臂 伸缩、手臂旋转、手爪上下、手爪松紧。
手爪提升气缸: 提升气缸采用双向电控气阀控制。
磁性传感器: 用于气缸的位置检测。检测气缸伸 出和缩回是否到位,为此在前点和后点上各 一个,当检测到气缸准确到位后将给PLC发 出一个信号;(在应用过程中棕色接PLC主 机输入端,蓝色接输入的公共端)
电感式传感器:检测金属材料, 检测距离为3~5mm。
光纤传感器:用于检测不同颜 色的物料,可通过调节光纤 放大器来区分不同颜色的灵 敏度。 三相异步电机:驱 动传送带转动,由变频器控 制。
推料气缸:将物料推入料槽, 由电控气阀控制。
钮按 程下 序启 断动 电按 保钮 持程 ,序 停开 止始 标运 志行 位, 得按 电下 。停
个工件到达后,再以30Hz的频率正向高速运行。
3.系统的停止
设备运行过程中如按下停止按钮,圆盘直流电动机立即停止,机械手将完成当前工件的搬运后 回到原位停止,分拣装置必须完成输送皮带上工件的分拣后才能停止,运行指示灯灭。
设备运行过程中如出现紧急情况,需要立即停止设备时,可按下急停开关,按下后所有装置都停 止运行,蜂鸣器响,急停开关复位后,蜂鸣器停止报警,如要启动设备,再按下启动按钮,设备 接着急停时的工作顺利进行。
1-磁性开关D-C73 2-传送分拣机构 3-落料口传感 器 4-落料口 5-料槽 6-电感式传感器 7-光 纤传感器 8-光纤传感器 9-节流阀 10-三相异 步电动机 11-光纤放大器 12-推料气缸
落料口传感器:检测是否有物 料到传送带上,并给PLC一 个输入信号。 落料孔:物 料落料位置定位。 料槽: 放置物料。
玻璃搬运机器人设计说明书最终

五自由度玻璃搬运机器人设计说明书目录1.任务描述 (3)2.自由度分解和坐标系的选择 (4)3 .玻璃搬运机器人的结构设计 (5)4 .玻璃搬运机器人的技术参数和气动原理图 (9)7 .控制系统 (10)8 . 设计与感受. ....................................... 错误!未定义书签。
9 . 参考文献 (19)一.任务描述该设计的目的是为了设计一台五自由度玻璃搬运机器人,主要对五自由度玻璃搬运机器人的机械结构部分进行设计和分析。
设计机器人大体上可分为两个阶段:1、系统分析阶段错误!未找到引用源。
根据系统的目标,明确所采用机器人的目的和任务;错误!未找到引用源。
分析机器人所在系统的工作环境;错误!未找到引用源。
根据机器人的工作要求,确定机器人的基本功能和方案。
如机器人的自由度、信息的存储量、计算机功能、动作精度的要求、所能抓取的重量、容许的运动范围、以及对温度、震动等环境的适应性。
2、技术设计阶段错误!未找到引用源。
根据系统的要求确定机器人的自由度和允许的空间工作范围,选择机器人的坐标形式;错误!未找到引用源。
拟订机器人的运动路线和空间作业图;错误!未找到引用源。
确定驱动系统的类型;错误!未找到引用源。
选择各部件的具体结构,进行机器人总装图的设计;下面结合设计的基本要求和基本原则确定本系统的方案见图2-1。
图2-1玻璃搬运机器人的总体方案图二、自由度描述和坐标系的选择2.1 自由度和坐标系的选择机器人的运动自由度是指各运动部件在三维空间相当于固定坐标系所具有的独立运动数,对于一个构件来说,它有几个运动坐标就称其有几个自由度。
各运动部件自由度的总和为机器人的自由度数。
机器人的手部要像人手一样完成各种动作是比较困难的,因为人的手指、掌、腕、臂由19个关节组成,共有27个自由度。
而生产实践中不需要机器人的手有这么多的自由度一般为3-6个(不包括手部)。
本次设计的搬运机器人为5自由度,即:手爪张合;腕部回转;臂部伸缩;臂部回转;臂部升降。
搬运机器人.

搬运机器人的机械设计------臂部设计
手臂的各种运动通常用 驱动机构(如液压缸或 者气缸)和各种传动机 构来实现,从臂部的受 力情况分析,它在工作 中既受腕部、手部和工 件的静、动载荷,而且 自身运动较为多,受力 复杂。因此,它的结构、 工作范围、灵活性以及 抓重大小和定位精度直 接影响机械手的工作性 能。
搬运机器人的机械设计------腕部设计
目前 , 应 用最为广 泛 的手腕回 转运动机 构 为回转液压(气)缸, 它的结构 紧凑 , 灵 巧 但回转角 度小 ( 一 般 小于 270 °) , 并且要 求严格密 封 , 否则 就 难保证稳 定的输出 扭 矩。因此 在要求较 大 回转角的 情况下 , 采 用齿条传 动或链轮 以 及轮系结 构 。 举例 设 计的搬运 机器人的 腕 部是实现手部 180°的 旋转运动
手部多为两指(也有多指);根 据需要分为外抓式和内抓式两种; 也可以用负压式或真空式的空气 吸盘(主要用于可吸附的,光滑 表面的零件或薄板零件)和电磁 吸盘。
传力机构形式较多,常用的有: 滑槽杠杆式、连杆杠杆式、斜楔 杠杆式、齿轮齿条式、丝杠螺母 式、弹簧式和重力式。本次设计 的手部选择夹持类回转型结构手 部。
搬运机器人可安装不同的末端执行器 以完成各种不同形状和状态的工件搬 运工作,大大减轻了人类繁重的体力 劳动。目前世界上使用的搬运机器人 愈10万台,被广泛应用于机床上下料、 冲压机自动化生产线、自动装配流水 线、码垛搬运、集装箱等的自动搬运。 部分发达国家已制定出人工搬运的最 大限度,超过限度的必须由搬运机器 人来完成。
1.步进电机 2.标准气缸 3.标准气缸 4.平行气爪
四自由度搬运机器人结构简图
机械手结构示意图
第五章搬运机器人系统工作站(搬运工作站外围控制系统的设计1)优质教学课件PPT

MESSI
纸箱的通过检测
MESSI MESSI
5.5.1 光敏传感器的选型
MESSI
(4)限定反射型 限定反射型光敏传感器与扩散反射型一 样,投光器和受光器置于一体。由发射器发出光信号,并在限 定范围内由接收器接受被检物反射的光,并引起光敏传感器 动作,输出开关控制信号。如下左图所示,呈正反射光结构, 检测距离限定于某个范围,不易受到背景物体的干扰。
对射型光敏传感器的特点: 1)动作的稳定度高,检测距离长(数厘米~数十米)。 2)即使检测物体的通过线路变化,检测状态也不变。 3)检测物体的光泽、颜色、倾斜等的影响很少。 对射型光敏传感器的应用如下图所示。
MESSI
车辆的通过检测
MESSI MESSI
5.5.1 光敏传感器的选型
MESSI
(2)回归反射型 回归反射型光敏传感器的投光器与受光器装 在同一个机壳里,通常投光器发出的光线将反射到相对设置的反 射板上,回到受光器。如果检测物体遮蔽光线,进人受光器的光量 将减少。根据这种光的变化,便可进行检测。
视觉传感器、旋转编码器和超声波传感器等,每种传感器都有自身的 特点和应用范围。
在工业机器人工作站中大量使用光敏传感器、光纤传感器,用于 工件有无的检测、设备运行中位置的检测等。光敏传感器、光纤传 感器以其无触点、无机械碰撞、响应速度快、控制精度高等特点在 工业控制装置和机器人中得到了广泛的应用。
MESSI
第五章 搬运机器人系统工作站
5.5 搬运工作站外围控制系统的设计 5.5.1 光敏传感器的选型 5.5.2 变频器的选型
MESSI
MESSI MESSI
MESSI
学习目标
▪ 目标一 ▪ 目标二 ▪ 目标三 ▪ 目标四 ▪ 目标五
AGV搬运机器人PPT课件

3、RFID Sensing Navigation:Leading AGV by means of RFID label and recognizing device to testify the location.Stations can be difined anywhere,even the most complicated case.
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
Leading Method of AGV
1、Magnetic Senseing Navigation:Led by magnehrough clicking magnetic stripe to the ground.There is magnetic senseing behind AGV,when it passes,it can sense the magnetic stripe in order to finish automatic goods-carrying.
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
The Main Features of AGV
1、It's automatic-moving transfer robot,take no fixed position,easy to change its location.
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
工业机器人技术及应用 搬运机器人及其操作应用PPT课件

所 处 位
机、控制系统、搬运系统(气体发生装置、真空发生装置和手爪等)和安全保护装 置组成。
置
———
5 3
—
1
2
6
【
课
堂
认
知 】
4
1 — 机器人控制柜; 2 — 示教器; 3 — 气体发生装置; 4 — 真空发生装置; 5 — 操作机; 6 — 端拾器(手 爪)
搬运机器人系统组成
精选PPT课件
10/52
夹钳式tcp生产再现返回目录2252电气照明是建筑电气技术的基本内容是保证建筑物发挥基本功能的必要条件合理的照明对提高工作效率保证安全生产和保护视力都具有重要的意义53搬运机器人的作业示教531冷加工搬运作业以机加工件搬运为例选择龙门式5轴末端执行器为气吸附采用在线10返回搬运运动轨迹图例目录2352电气照明是建筑电气技术的基本内容是保证建筑物发挥基本功能的必要条件合理的照明对提高工作效率保证安全生产和保护视力都具有重要的意义53搬运机器人的作业示教531冷加工搬运作业程序点说明吸盘动作程序点说明吸盘动作程序点1程序点8机器人原点搬运中间点吸取程序点2程序点9移动中间点搬运中间点吸取程序点3程序点10搬运临近点搬运作业点放置程序点4程序点11搬运作业点吸取搬运规避点程序点5程序点12搬运中间点吸取移动中间点程序点6程序点13搬运中间点吸取机器人原点程序点7搬运中间点吸取返回目录2452电气照明是建筑电气技术的基本内容是保证建筑物发挥基本功能的必要条件合理的照明对提高工作效率保证安全生产和保护视力都具有重要的意义53搬运机器人的作业示教531冷加工搬运作业登陆程序点8登陆程序点9示教前的准备登陆程序点7新建一个程序登陆程序点10再现搬运登录程序点1登陆程序点6登陆程序点11登陆程序点12运行确认跟踪登录程序点2登录程序点5登陆程序点13设定搬运条件登录程序点3登录程序点4返回目录冷加工搬运机器人作业示教流程2552电气照明是建筑电气技术的基本内容是保证建筑物发挥基本功能的必要条件合理的照明对提高工作效率保证安全生产和保护视力都具有重要的意义53搬运机器人的作业示教531冷加工搬运作业程序点的登录示教模式下手动操作移动龙门搬运机器人轨迹设定程序点1至程序点13和程序点13需设置在同一点可方便编写程序此外程序点1至程序点13处于与工件夹具互不干涉位置
玻璃搬运机器人
400kg可搬6轴多关节机器人 SC400LC 应用案例
第19页/共38页
大型玻璃基板搬运机器人
Artis SJ系列
第20页/共38页
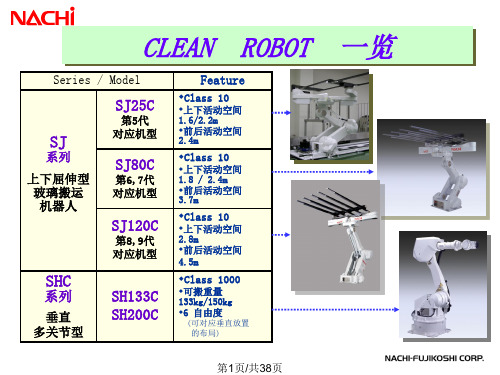
CLEAN ROBOT 一览
Series / Model
Feature
SJ25C
第5代 对应机型
Class 10
上下活动空间 1.6/2.2m 前后活动空间 2.4m
第22页/共38页
基本规格
Freedom (No. of motor)
Single Arm Double Arm
Work Range
Z-axis Rotation-axis Horizontal-axis
Max Velocity
Z-axis Rotation-axis Horizontal-axis
1300 kg
1345 kg
Class 1000 (Federal Standard 2090)
1 [rad] = 180 / [° ], 1 [N・m] = 1 / 9.8 [kgf・m]
Note 1) During development, specifications may change without notice.
Horizontal operation area comparison +700mm UP
(+/- 135deg. and +/-125deg.)
第9页/共38页
基本规格(与他社对比)
机器人型号
他社
ARTIS SH200C CR165-200
构造 自由度
多关节型 6
多关节型 6
最大臂长
mm