机械原理第四章 齿轮机构(杨家军版)
合集下载
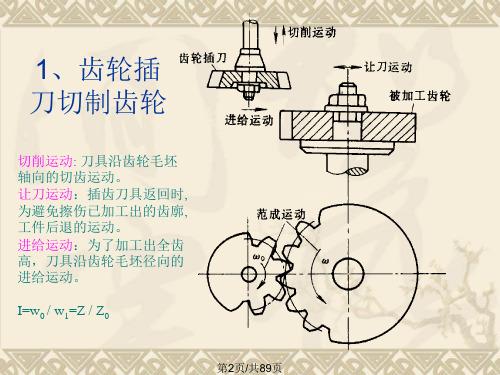
华中科技大学杨家军机械原理5齿轮系
z 2z 3 n1 101 99 1 H 1 i13 1 1 nH z 1 z 2' 100 100 10000
或 iH1=10000
可见行星轮系可实现很大的传动比。
(一般用于减速传动)
§5-3 复合齿轮系及其传动比
3
1 2 4 H 2'
复合轮系:既有行星轮系又有定轴轮系或有若干个行星系 组合而成的复杂轮系。 轮系的传动比:轮系中首轮与末轮的角速度的比 传动比的计算内容包括:传动比的大小和齿轮的转向。
对上式作以下说明: 1)只适用于转化齿轮系的首末轮的回转轴线平行(或重 合)的周转齿轮系。 2)齿数比前一定有“+”或“—”号。其正负号判定,可将 z2 转臂H视为静止,然后按定轴齿轮系判别主从动轮转向关 HH 注意 i 系的方法确定。 例 1k 与i1K的区别 3)注意1 、 k 、 H 应分别用正负号代入(推导时假 z1 定三者同向); 4)1 、 k 、 H 三个量,须知其中任意两个角速度的 大小和转向,才能确定第三个角速度的大小和转向;
2 1 3
2
H 1
OH
2
3
1
3
行星轮
转臂
中心轮
2、周转齿轮系传动比的计算(反转法)
构件名称 转臂 中心轮1 中心轮3 各构件的绝对角速度 H 各构件的相对角速度 HH = H — H = 0 1H = 1 — H 3H = 3 — H
1 3
-H
H 1 3
转化齿轮系的传动比就可以按定轴 齿轮系传动比求解:
z 2z 3z 4z 5 1 i 15 5 z 1z 2'z 3 z 4' Z3:仅改变转向,惰轮
3.首、末两轮转向关系的确定(与齿轮传动类型有关) 1)全部由平行轴圆柱齿轮组成的定轴齿轮系,可在传 动比计算公式的齿数比前乘以(-1)m,m为外啮合 齿轮的对数。 1
机械原理第四章 齿轮机构(杨家军版)

p
分度圆上有: d=z
p
为了设计、制造等方面的方便性,令:
p
于是有: d = mz
p
=m
标准值
模数系列
第 系 一 列 0.1 0.8 8 第 系 二 列 0.35 (6.5) 0.12 1 10 0.7 7 9 1.25 12 0.9 0.15 1.5 16 1.75 (11) 14 20 2.25 18 0.2 2 25 2.75 22 28 0.25 2.5 32 (3.25) 3.5 (30) 0.3 3 40 0.4 4 50 (3.75) 36 4.5 45 5.5 0.5 5 0.6 6
A
AB = AN2 - N2B
= =
=
同侧
7)渐开线齿廓各点具有不同的压力 角,点K离基圆中心O愈远,压力 角愈大。K0的压力角为0
Vk
k
Pk
N
K
rk
NOK=
rb cos k = rk
k
rb k k
O
K0
基圆
3. 渐开线方程
F VK 渐开线
K——渐开线在K点的压力角。
αK
K
rb(θK + K) =AN=KN= rbtan K
(2)蜗杆蜗轮传动
总结:齿轮传动的特点
①传动比稳定 ②传动效率高 ③工作可靠性高 ④结构紧凑 ⑤使用寿命长
①制造和安装精度要求较高
特点:蜗杆蜗轮传动多用 于两轴交错角为90的传 动,其传动比大,传动平 稳,具有自锁性,但效率 较低。
②不适宜用于两轴间距离较大的 传动
4. 齿轮机构的机构运动简图
齿廓曲线,均可作为齿轮机构的齿廓。实际上
摆线和圆弧等作为齿廓曲线。 2)节圆作纯滚动,外啮合中心距=节圆半径之和 3)相互啮合传动时存在节圆 还应该考虑制造、安装和强度等要求。渐开线、
机械原理齿轮机构解析
第60页/共89页
二、正确啮合条件
第61页/共89页
三、传动比及从动轮转向
当
时,
v v v
c2
c1
c 2c1
第62页/共89页
四、交错轴斜齿轮传动的优点
第55页/共89页
四、 斜齿轮的当量齿数
1) 原因 2) 研究对象 3) 方法 其长半轴 a=d/2cosβ 短半轴 b=d/2 椭圆在c点的曲率半径 当量齿数: a2 d
b 2cos2
Zv
2p mn
d mn cos2
mn z mn cos2
Z
cos3
第56页/共89页
五、斜齿轮的优缺点
法向模数mn和端面模数mt mn= mt cos β
第52页/共89页
法向(AOC平面)压力角an、端面 (AOB平面) 压力角at
法向(AOC平面)压力角an、 端面(AOB平面) 压力角at
tgan
OC OA
,
tgat
OB OA
及 OC=OBcosB 所以
tgan tgat cos
第53页/共89页
①可以减小齿轮机构的尺寸 ②可以改善齿轮的磨损情况 ③可以提高齿轮的承载能力 ④a’=a,可以成对替换标准齿轮和修复旧齿轮 ⑤必须成对设计、制造、使用,互换性差 ⑥εα略有减小 ⑦小齿轮正变位,齿顶易变尖
第39页/共89页
二、正传动(不等移距变位传动、角度变位传动)
(1)齿数条件:Z1+ Z2不受限制,α’>α,a’>a, y>0, △y >0
第9页/共89页
5-6 渐开线齿轮加工中的几个问题
1、齿厚计算与测量 2、 根切现象及原因 3、标准齿轮不发生根切的最少齿数 4、避免根切的最小变位系数xmin
二、正确啮合条件
第61页/共89页
三、传动比及从动轮转向
当
时,
v v v
c2
c1
c 2c1
第62页/共89页
四、交错轴斜齿轮传动的优点
第55页/共89页
四、 斜齿轮的当量齿数
1) 原因 2) 研究对象 3) 方法 其长半轴 a=d/2cosβ 短半轴 b=d/2 椭圆在c点的曲率半径 当量齿数: a2 d
b 2cos2
Zv
2p mn
d mn cos2
mn z mn cos2
Z
cos3
第56页/共89页
五、斜齿轮的优缺点
法向模数mn和端面模数mt mn= mt cos β
第52页/共89页
法向(AOC平面)压力角an、端面 (AOB平面) 压力角at
法向(AOC平面)压力角an、 端面(AOB平面) 压力角at
tgan
OC OA
,
tgat
OB OA
及 OC=OBcosB 所以
tgan tgat cos
第53页/共89页
①可以减小齿轮机构的尺寸 ②可以改善齿轮的磨损情况 ③可以提高齿轮的承载能力 ④a’=a,可以成对替换标准齿轮和修复旧齿轮 ⑤必须成对设计、制造、使用,互换性差 ⑥εα略有减小 ⑦小齿轮正变位,齿顶易变尖
第39页/共89页
二、正传动(不等移距变位传动、角度变位传动)
(1)齿数条件:Z1+ Z2不受限制,α’>α,a’>a, y>0, △y >0
第9页/共89页
5-6 渐开线齿轮加工中的几个问题
1、齿厚计算与测量 2、 根切现象及原因 3、标准齿轮不发生根切的最少齿数 4、避免根切的最小变位系数xmin
齿轮机械原理课件

G2
b a
K1K3 K1'K3'
齿轮机械原理课件
• 问题2:G1、G3为同一基圆上所生成的两条反向渐
开线,试问 k1k 2 和 k '1 k 2 '有何关系?
k1 K2’
K1’
k2
齿轮机械原理课件
• 问题2:G1、G3为同一基圆上所生成的两条反向渐
开线,试问 k1k 2 和 k '1 k 2 '有何关系?
齿轮机械原理课件
齿轮传动机构的特点 (1)直接接触的啮合传动;可传递空间任意两轴之
间的运动和动力; (2)功率范围大,速比范围大,效率高,精度高; (3)传动比稳定,工作可靠,结构紧凑; (4)改变运动方向; (5)制造安装精度要求高,不适于大中心距,成本
较高,且高速运转时噪声较大。
齿轮机械原理课件
,齿条的齿距均相等.
斜角(齿形角)。
(3) 分度线至 齿顶线的 高 度为齿顶高 ,分
度线至齿 根线的高 度 为齿根高
齿轮机械原理课件
标准安装
N1
B1
01
C
02
N2
B1点进入啮合瞬时
齿轮机械原理课件
标准安装
N1
r b1ቤተ መጻሕፍቲ ባይዱ
01
B1
C
r r ,
2
2
02
r r ,
1
1
B2
r b2
, N2
B2点脱离啮合瞬时
齿轮机械原理课件
设计:潘存云
m=4 z=16 m=2 z=16
齿轮机械原理课件
m=1 z=16
rb rk c o k s rc os Vk
F
k
齿轮机构全解.pptx

刀具外移χ · m→正变位
因刀具不变,故变位齿轮的齿距.模数 和压力角均不变,分度圆和基圆也保持 不变。 变位→齿廓形状不相同。 刀具外移(正变位)→齿轮的齿根变宽,齿顶变窄。 刀具内移(负变位)→齿轮的齿根变窄,齿顶变宽。 ∵齿廓取同一渐开线的不同部位,不同部位的渐开线其曲率半径不相同
刀具中线
第16页/共25页
└tgαn=tgαt·cosβ
4,p.68) ┌d=mnZ/cosβ ( ha*=1 ,C*=0.25) │da=d+2ha=d+2mn │df=d-2hf=d-2.5mn └a=(d1+d2)/2=mn(Z1+Z2)/(2cosβ)
3. 斜齿的重合度:由于螺旋角的影响,斜齿传动的啮合弧增长了,故重合
装和强度。
第8页/共25页
n K
(P12)
C
2
(P23)O2 图4-2
§4-3渐开线齿廓
(二)渐开线齿廓满足定角速比要求
p.56
→i 瞬 =常数 (齿廓公法线通过节点P) 证明:渐开线齿廓E1和E2在任一点K接触,过K点作两齿廓的
公法线nn与两轮连心线交于P点。根据渐开线的性质,nn必同时 与两基圆相切 →两齿廓公法线nn即为两基圆内公切线,齿轮传 动时基圆位置变,同一方向的内公切线只有一条 → nn与连心线 O1O2交点P 为定点→故渐开线满足定角速比的条件。
和啮合角是两个齿轮啮合时才出现的。
第11页/共25页
三、重合度及连续传动条件
开始啮合点: 主动论齿根与从动轮齿顶接触点与N1N2交于A点。
退出啮合点:主动轮齿顶与从动轮齿顶根接触点与N1N2交于E点
ω1 da1
∴AE为实际啮合线段。 当两轮齿顶加大时,A和E驱
因刀具不变,故变位齿轮的齿距.模数 和压力角均不变,分度圆和基圆也保持 不变。 变位→齿廓形状不相同。 刀具外移(正变位)→齿轮的齿根变宽,齿顶变窄。 刀具内移(负变位)→齿轮的齿根变窄,齿顶变宽。 ∵齿廓取同一渐开线的不同部位,不同部位的渐开线其曲率半径不相同
刀具中线
第16页/共25页
└tgαn=tgαt·cosβ
4,p.68) ┌d=mnZ/cosβ ( ha*=1 ,C*=0.25) │da=d+2ha=d+2mn │df=d-2hf=d-2.5mn └a=(d1+d2)/2=mn(Z1+Z2)/(2cosβ)
3. 斜齿的重合度:由于螺旋角的影响,斜齿传动的啮合弧增长了,故重合
装和强度。
第8页/共25页
n K
(P12)
C
2
(P23)O2 图4-2
§4-3渐开线齿廓
(二)渐开线齿廓满足定角速比要求
p.56
→i 瞬 =常数 (齿廓公法线通过节点P) 证明:渐开线齿廓E1和E2在任一点K接触,过K点作两齿廓的
公法线nn与两轮连心线交于P点。根据渐开线的性质,nn必同时 与两基圆相切 →两齿廓公法线nn即为两基圆内公切线,齿轮传 动时基圆位置变,同一方向的内公切线只有一条 → nn与连心线 O1O2交点P 为定点→故渐开线满足定角速比的条件。
和啮合角是两个齿轮啮合时才出现的。
第11页/共25页
三、重合度及连续传动条件
开始啮合点: 主动论齿根与从动轮齿顶接触点与N1N2交于A点。
退出啮合点:主动轮齿顶与从动轮齿顶根接触点与N1N2交于E点
ω1 da1
∴AE为实际啮合线段。 当两轮齿顶加大时,A和E驱
机械原理齿轮传动ppt课件
(50p)
齿顶高ha ha* m 齿根高hf (ha* C*) m
标准值Cha**
1.0 0.25
4.4.2 渐开线标准直齿圆柱齿轮的几何尺寸计算 标准齿轮的特征: 分度圆上模数和压力角为标准值; 齿距p所包含的齿厚s与齿槽宽e相等; 具有标准的齿顶高与齿根高。
4.6.4 渐开线齿廓的根切 1. 根切的现象
2.根切的危害 齿根强度削弱,重合度减小
根切位置
3. 根切的原因 标准齿轮:
刀具的齿顶线超过
了极限啮合点N。
CN CB
CN mz sin
2 CB mha*
sin
z
2ha*
sin 2
标准齿轮:
20,h
* a
1.0
z 17.097 17
vc1 vc2
1 O1C 2 O2C
i12
ω1 ω2
O2C O1C
const
C点:啮合节点,简称节点 27p
齿廓啮合基本定律 齿廓接触点的公法线始终通过中心连线上一 定点,速比恒定。 节圆:由节点决定的圆 共轭齿廓 凡满足齿廓啮合基本定律而相互啮合的一对 齿廓
16
轭
两头牛背上的架子称为轭,轭使两头牛同步行
rb—基圆半径; BK—渐开线发生线 θ K—渐开线上K点的展角
4.3.2 渐开线的性质
1.渐开线的发生线展直前后长度不变;
弧AB KB
K
2. B 是渐开线K点处的曲率中心,BK 是曲率半径; A 处的曲率半径为0 KB 为渐开线在K点的法线,并与基圆相切
3.渐开线的形状取决于基圆的大小 rb↑→∞,渐开线→直线;
齿轮机械原理
C=c*m
作用:1)储油润滑
2)避免一齿h轮a*的齿顶与另c一* 个齿轮 的齿槽相接触。
只要z、m、α、ha 、hf 这五个参数一经确定,齿轮的几何 尺寸,包括轮齿的渐开线形状也即全部确定,因而以上五个 参数称为渐开线标准齿轮的基本参数。
二、标准直齿轮的几何尺寸计算
标准齿轮:标准齿轮是指m、α、ha*、c* 均取标准值,具有
①m、z决定了分度圆的大小,而齿轮的大小主要取决于分度圆,因此m、z是
决定齿轮大小的主要参数
②轮齿的各部分尺寸大小与m, ha* , c* 有关与z无关
③至于齿形,与m,z,α有关
表 5-5 渐 开 线 标 准 直 齿 圆 柱 齿 轮 几 何 尺 寸 公 式 表
名
称 代号
公
式
分度圆直径
d
d1=mz1 d2=mz2
齿轮传动与带传动相比主要缺点有:
(1)制造、安装精度要求较高,因而成本也较高; (2)不宜作远距离传动。 (3)无过载保护 (4)需专门加工设备
类型
1.按两轴位置 平面齿轮机构 (圆柱齿轮机构)
齿 轮 机 构
空间齿轮机构
直齿圆柱齿轮机构 (轮齿与轴平行)
外啮合 内啮合 齿轮齿条
斜齿圆柱齿轮传动 外啮合
渐开线齿廓啮合满足定传动比传动。
i12
1 2
O2 P O1P
r2 r1
rb2 rb1
常数
三.渐开线齿廓啮合的特点
1.中心距可分性
上式表明:渐开线齿轮的传动比等于两轮基圆半径的反比。当
一对齿轮制成后,其基圆半径是确定不变的,因而其传动比也是确
定不变的,即使由于安装误差或轴承磨损间隙加大等因素导致中心
啮合线、公法线、两基圆内公切线, 发生线 ,力的作用线五线重合。
机械原理-齿轮
ω1
节圆
r1
p
1 n k1
中心距a’
r2 因为: i12 , 且a r1 r2 r1 i12 a a1 所以: r1 ; r2 1 i12 1 i12
凡能满足齿廓啮合基本定律的 一对齿廓称为共轭齿廓,理论上有 无穷多对共轭齿廓,其中以渐开线 齿廓应用最广。
4、齿轮齿条传动
直齿
斜齿
非圆齿轮
二、齿轮机构传动的特点
①传动比稳定; ②传动效率高; ③工作可靠性高; ④结构紧凑; ⑤使用寿命长。 ①制造和安装精度要求 较高;
缺点:
优点:
②不适宜用于两轴 间距离较大的传动。
三、齿轮机构设计内容
①齿轮齿廓形状的设计 ②单个齿轮的基本尺寸的设计 ③一对齿轮传动设计
第四章 齿轮机构
齿轮机构的主要内容
§4-1 齿轮机构的类型和特点
§4-2 齿廓啮合基本定律及渐开线齿形
§4-3 渐开线直齿圆柱齿轮机构 的基本参数与尺寸计算 §4-4 渐开线直齿圆柱齿轮机构
§4-5 渐开线斜齿圆柱齿轮机构
§4-6 直齿圆锥齿轮机构 §4-7 其他齿轮机构简介
引言
据史料记载,远在公元前400~200年的中国古代就已开始使用 齿轮,在我国山西出土的青铜齿轮是迄今已发现的最古老齿 轮,作为反映古代科学技术成就的指南车就是以齿轮机构为 核心的机械装置。 齿轮传动用来传递任意两轴间的运动和动力,其圆周速度可 达到300m/s,传递功率可达105KW,齿轮直径可从不到1mm 到150m以上,是现代机械中应用最广的一种机械传动。
O1 ' r1 c ' ' r2 O2
m a r1 r2 r1 r2 ( z1 z2 ) 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
o1
ω1 1 k1 k n
节圆 r1
i12 a1 a r2 = r1 = 1 i12 1 i12
r2 i12 = 又 a = r1 r2 r1
n
p
节圆
o2
a
中心距
r 2 2
ω2
结论:
3 ω1 1 k1 k
P13 1)理论上,凡能满足齿轮啮合基本定律的一对 o 1
A
AB = AN2 - N2B
= =
=
同侧
7)渐开线齿廓各点具有不同的压力 角,点K离基圆中心O愈远,压力 角愈大。K0的压力角为0
Vk
k
Pk
N
K
rk
NOK=
rb cos k = rk
k
rb k k
O
K0
基圆
3. 渐开线方程
F VK 渐开线
K——渐开线在K点的压力角。
αK
K
rb(θK + K) =AN=KN= rbtan K
齿廓曲线,均可作为齿轮机构的齿廓。实际上
摆线和圆弧等作为齿廓曲线。 2)节圆作纯滚动,外啮合中心距=节圆半径之和 3)相互啮合传动时存在节圆 还应该考虑制造、安装和强度等要求。渐开线、
n
(P12)
p
n
4)变传动比齿轮的节点不再是定点, 是按一定规律在连心线上移动轨迹 不是两个圆,而是两条封闭曲线, 封闭曲线为节线
(2)蜗杆蜗轮传动
总结:齿轮传动的特点
①传动比稳定 ②传动效率高 ③工作可靠性高 ④结构紧凑 ⑤使用寿命长
①制造和安装精度要求较高
特点:蜗杆蜗轮传动多用 于两轴交错角为90的传 动,其传动比大,传动平 稳,具有自锁性,但效率 较低。
②不适宜用于两轴间距离较大的 传动
4. 齿轮机构的机构运动简图
§4-1 齿轮机构的应用及分类
内啮合齿轮传动 用于平行轴间传 动的齿轮机构 齿 轮 机 构 分 类 外啮合齿轮传动 齿轮齿条传动 用于相交轴间传 —— 圆锥齿轮传动 动的齿轮机构 螺旋齿轮传动 蜗轮蜗杆传动 直齿轮传动 斜齿轮传动 人字齿轮传动 直齿 斜齿 曲齿 用于交错轴间传 动的齿轮机构
1. 用于平行轴之间传递的齿轮机构 (1)直齿圆柱齿轮机构
(avi)
非圆齿轮传动可以把一个匀速转动变换为非匀速转动, 或者把一个非匀速转动变换为匀速转动
二、齿廓啮合基本定律
对齿轮传动的基本要求是保证 瞬时传动比:
3 P13 o1 ω1 1 (P12) k1 k n
i12=w1/w2= C
两齿廓在任一瞬时(即任意点k接 触时)的传动比:i12=w1/w2=?! 点p是两齿轮廓在点K接触时的相 对速度瞬心, 则有 Vp=w o p=w o p
齿轮机构及其设计
中国古代机器人
•
木牛流马
三国时,诸葛亮制作的木牛流马是脍 炙人口的,可惜失传于世。传说诸葛亮 的木牛流马可以不吃不喝,用其在崎岖 的栈道上运送军粮。魏兵很是羡慕,夺 得木牛流马后也仿制了许多,用来驮粮 食。结果被蜀兵截住,把嘴内的机关一 扳,木牛流马个个不能走动,魏兵再次 夺回去也无法驱赶,反而损失掉很多粮 食。
5. 齿轮机构的功能
齿轮用于传递(变换)运动和力。 (1)转速大小的变换
w1
z1
z1 w2 = z w1 2
w2
z2
z1 齿数比 决定转速变换量 z2
(2) 转速方向的变换
(avi)
(avi)
(avi)
平行轴外啮合齿轮传动改变齿轮的回转方向
(avi)
(avi)
平行轴内啮合齿轮传动不改变齿轮的回转方向
p
分度圆上有: d=z
p
为了设计、制造等方面的方便性,令:
p
于是有: d = mz
p
=m
标准值
模数系列
第 系 一 列 0.1 0.8 8 第 系 二 列 0.35 (6.5) 0.12 1 10 0.7 7 9 1.25 12 0.9 0.15 1.5 16 1.75 (11) 14 20 2.25 18 0.2 2 25 2.75 22 28 0.25 2.5 32 (3.25) 3.5 (30) 0.3 3 40 0.4 4 50 (3.75) 36 4.5 45 5.5 0.5 5 0.6 6
齿轮齿条机构
(3)人字齿圆柱齿轮机构
特点:由两排旋
向相反的斜齿轮 对称组成,其轴 向力被相互抵消。 适合高速和重载 传动,但制造成 本较高。
(4)非圆齿轮机构
特点:轮齿分布在非圆柱体上,可实现一对齿轮的变传 动比。需要专用机床加工,加工成本较高,设计难度较 大。
2. 相交轴之间传递运动 ——圆锥齿轮机构
o1
r'
1
c
' r2
短齿标准: h* c* = 0.3 a = 0.8,
o2
'
2.渐开线标准直齿圆柱齿轮的几何尺寸
1)基圆
d 前面已有公式 cos k = b d
k
进而可得:
基圆直径为
d b = d cos = mz cos
基圆上的齿距 P b = pd b / z = pm cos
2)标准齿轮 且有
r2'
o2 m 2 = r a=r ( z1 z2 ) 1 r 1 r 2 = 2
'
s =e
' 1
' 2
s =e
' 2
' 1
4)几何尺寸计算:
表5-5渐开线标准直齿圆柱齿轮几何尺寸公式表 名 称
代 号 d db ha hf da 公 d1=mz1 ,d2=mz2 db1=mz1 cos a ,db2=mz2 cos a
内啮合直齿轮
外啮合直齿轮 a. 轮齿分布在圆柱上,且与其轴线平行; 齿轮齿条齿轮 b. 外啮合齿轮转向相反,内啮合齿轮转向相同。
(2)斜齿圆柱齿轮机构
(avi)
内啮合圆柱齿轮机构
外啮合斜齿圆柱齿轮
特点:轮齿与其轴线倾斜;传 动平稳,适合于高速传动,但 有轴向力;有外啮合、内啮合 和齿轮齿条传动类型。 (avi)
a
ha hf h df da d
ha= h* 齿顶高: am
*) (5)径向间隙系数( c
——亦称顶隙系数
*) m 齿根高: c hf=( h* + a
O
轮齿间的径向间隙: c = c* m 齿顶高系数 h* 和径向间隙系数 a c* 均为标准值。 正常齿标准: h* c * = 0.25 a = 1,
b. 模数的意义 ◆ 模数的量纲 mm m=
p ,确定模数 m 实际上就是确定周节 p ,也就是确
p
定齿厚和齿槽宽e。模数m越大,周节p越大,齿厚s和齿槽 宽e也越大。 模数越大,轮齿的抗弯强度越大。
c. 确定模数的依据 根据轮齿的抗弯强
度选择齿轮的模数
一组齿数相同,模数不同的齿轮。
分度圆:计算基准圆,及具有标准模数和标准压力角的圆 任何齿轮都有且仅有一个分度圆 d = mz
•
汽 车
打印机
内燃机
录音机
光驱
第四章 齿轮机构及其设计
§4-1 齿轮机构的应用及分类 §4-2 渐开线与渐开线齿廓啮合传动的特点 §4-3 齿轮各部分的名称、符号及标准齿轮几何尺寸的计算 §4-4 渐开线直齿圆柱齿轮的啮合传动 §4-5 渐开线齿廓的加工原理 §4-6 渐开线齿轮加工中的几个问题 §4-7 变位齿轮传动的类型、应用与变位系数的选择 §4-8 斜齿圆柱齿轮传动 §4-9 直齿圆锥齿轮传动
1 1 2 2
p
i12 =
w1 O2 P = w2 O1 P
n
o2
2 P23
由此可见,两轮的瞬时传动比与 瞬时接触点的公法线把连心线分成的 两段线段成反比。
ω2
齿廓啮合基本定律 要使两齿轮的瞬时传动比为 一常数,则不论两齿廓在任何位 置接触,过接触点所作的两齿廓 公法线都必须与连心线交于一定 点p 。
O
K0
4) 基圆以内没有渐开线。
5) 渐开线的形状仅取决于其基圆的大小。
A
K1 K2 A1 θ
1
∞
A2
rb1 O1
N1 N2
其中:1= 2
θ2
rb2
O2 N
∞
6) 同一基圆上任意两条渐开线间的法向距离相等。 a. 异侧 A1B1= A1N1 + N1B1
A2
K1
K2 B1
=
AB = AN1 + N1B A2B2= A2N2 + N2B2
(3)分度圆压力角(齿形角) :在分度圆上的受力方向线 与被作用点速度方向线所夹锐角。
VK 渐开线 rK A
F
αK
K 发生线
rK = rb /cos aK cos a = rb /r
国家标准(GB1356-88) 中规定分度圆压力角为标准
θK
O
rb
αK
N
值为20。
(4)齿顶高系数( h* )
AB = AN2 + N2B 所以 A1B1= A2B2 异侧
= =
= =
A1
N1
N2 B
B2
A
=
b. 同侧 A1B1= A1N1 - N1B1 = AB = AN1 - N1B = 所以 A1B1= A2B2 =
A2 A1 K1 B2 B1 B N1 N2 K2
A2B2= A2N2 - N2B2
2 o2 P23 ω2
三、齿轮机构设计内容
内容包括
①齿轮齿廓形状的设计 ②单个齿轮的基本尺寸的设计 ③一对齿轮传动设计
§4-2 渐开线与渐开线齿廓啮合传动的特点