大连理工自动控制原理本科第2章习题
自动控制原理-第2章习题解答精选全文完整版
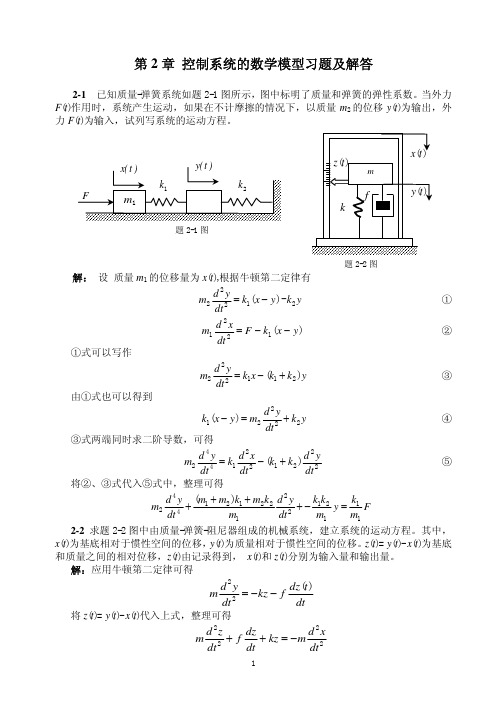
第2章 控制系统的数学模型习题及解答2-1 已知质量-弹簧系统如题2-1图所示,图中标明了质量和弹簧的弹性系数。
当外力F (t )作用时,系统产生运动,如果在不计摩擦的情况下,以质量m 2的位移y (t )为输出,外力F (t )为输入,试列写系统的运动方程。
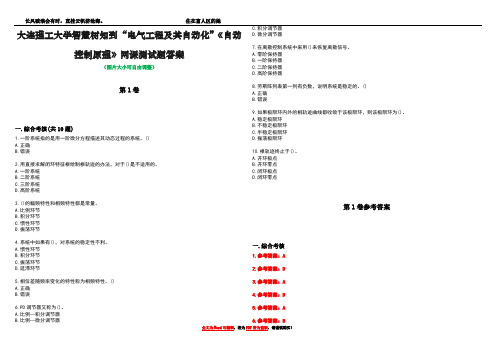
解: 设 质量m 1的位移量为x (t ),根据牛顿第二定律有y k y x k dt yd m 21222-)(−= ①)(1221y x k F dtxd m −−= ②①式可以写作y k k x k dtyd m )(211222+−= ③由①式也可以得到y k dtyd m y x k 22221)(+=− ④③式两端同时求二阶导数,可得2221221442)(dty d k k dt x d k dt yd m +−= ⑤将②、③式代入⑤式中,整理可得F m k y m k k dty d m k m k m m dt y d m 1112122122121442)(=−++++ 2-2 求题2-2图中由质量-弹簧-阻尼器组成的机械系统,建立系统的运动方程。
其中,x (t )为基底相对于惯性空间的位移,y (t )为质量相对于惯性空间的位移。
z (t )= y (t )- x (t )为基底和质量之间的相对位移,z (t )由记录得到, x (t )和z (t )分别为输入量和输出量。
解:应用牛顿第二定律可得dtt dz f kz dt y d m )(22−−= 将z (t )= y (t )- x (t )代入上式,整理可得2222dtx d m kz dt dz f dt z d m −=++题2-2图题2-1图解:(a )引入中间变量u c (t)表示电容器两端的电压。
根据基尔霍夫电流定律有o c c u R u R dt du C2111=+ 根据基尔霍夫电压定律有o i c u u u −=联立消去中间变量,可得描述输入量u i (t )和输出量u o (t )之间关系的微分方程为i i o o u R dt du C u R R R R dt du C121211+=++ (b )引入回路电流i (t )和电容器两端的电压u c (t)作为中间变量,根据基尔霍夫电压定律有i o u u i R =+1 另有电容元件的元件约束关系方程dtdu Ci c =和i R u u o c 2−=联立求解,消去中间变量可得i i o o u R dt du C u R R R R dt du C121211+=++(c )设电容器C 2两端的电压为u c 2(t),根据基尔霍夫电流定律有dtduC u u R dt u u d C c o i o i 2211)(1)(=−+− ①求导可得22221221)(1)(dtu d C dt u u d R dt u u d C c o i o i =−+− ② 另有输出支路电压方程o c c u u dtdu C R =+2222 等式两边求导有dtdu dt du dt u d C R oc c =+222222 ③将①、②代入③式,整理可得i ii ooo u C R dt du C R C R C R dt u d C R u C R dt du C R C R C R C R dt u d C R 2121221121221212122112121122+++=++++2-4 试求题2-4图所示有源RC 电路的微分方程,其中u i (t )为输入量,u o (t )为输出量。
自动控制原理习题2(含答案)

第二章习题及答案2-1试建立题2-1图所示各系统的微分方程[其中外力)(t F ,位移)(tx 和电压)(t u r为输入量;位移)(t y 和电压)(t u c为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dt yd m dt dy f t ky t F =--整理得)(1)()()(22t F m t y m k dt t dy m f dtt y d =++—(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有)()(111dtdydtdxf x x k -=-(1)对B 点有y k dtdydt dx f 21)(=-(2)联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I csR cs Rs U c r ++=(3)`2)()(Rs Uc s I =(4)联立式(3)、(4),可解得:),可解得: Cs R R R R Cs R R s U s U r c 212112)1()()(+++= 微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++ (d) 由图解2-1(d )可写出)可写出[]Cs s I s I s I R s U c R R r 1)()()()(++= (5))()(1)(s RI s RI Css I c R c -= (6)[]Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c |微分方程为微分方程为 rr r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明题2-2图中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
大连理工大学21春《自动控制原理》在线作业2-辅导答案

大工21春《自动控制原理》在线作业2注:本套试卷为学习辅导资料,仅供学生复习使用!!!一、单选题 (共 10 道试题,共 50 分)第1题,用直接求解闭环特征根绘制根轨迹的办法,对于()是不适用的。
【A.】一阶系统【B.】二阶系统【C.】三阶系统【D.】高阶系统提示:按照课程学习要求,完成本学期在线作业【正确答案】:D第2题,()是用来确定根轨迹上某点的相应增益值。
【A.】辐角条件【B.】幅值条件【C.】开环增益【D.】开环零点提示:按照课程学习要求,完成本学期在线作业【正确答案】:B第3题,如果开环零点数目m小于开环极点数目n,则有()条根轨迹终止于无穷远处。
【A.】n【B.】m【C.】n-m【D.】m-n提示:按照课程学习要求,完成本学期在线作业【正确答案】:C第4题,当根轨迹分支在实轴上某点相遇又向复平面运动时,该交点称为根轨迹的()。
【A.】会合点【B.】分离点【C.】相遇点【D.】分离极点提示:按照课程学习要求,完成本学期在线作业【正确答案】:B第5题,在分析中常将同频率下输出信号相位与输入信号相位之差称为()。
【A.】相位差【B.】信号差【C.】频率差【D.】相差提示:按照课程学习要求,完成本学期在线作业【正确答案】:A第6题,()是相位滞后环节,它的低通性能好。
【A.】比例环节【B.】微分环节【C.】积分环节【D.】振荡环节提示:按照课程学习要求,完成本学期在线作业【正确答案】:C第7题,一阶滞后环节的最大滞后相角为()。
【A.】0°【B.】60°【C.】90°【D.】180°提示:按照课程学习要求,完成本学期在线作业【正确答案】:C第8题,()的对数相频特性恒为0°。
【A.】比例环节【B.】惯性环节【C.】积分环节【D.】振荡环节提示:按照课程学习要求,完成本学期在线作业【正确答案】:A第9题,为了减少校正装置的输出功率,以降低成本和功耗,()装置通常被安置在前向通道的前端。
大连理工大学智慧树知到“电气工程及其自动化”《自动控制原理》网课测试题答案卷2
大连理工大学智慧树知到“电气工程及其自动化”《自动控制原理》网课测试题答案(图片大小可自由调整)第1卷一.综合考核(共10题)1.一阶系统指的是用一阶微分方程描述其动态过程的系统。
()A.正确B.错误2.用直接求解闭环特征根绘制根轨迹的办法,对于()是不适用的。
A.一阶系统B.二阶系统C.三阶系统D.高阶系统3.()的幅频特性和相频特性都是常量。
A.比例环节B.积分环节C.惯性环节D.振荡环节4.系统中如果有(),对系统的稳定性不利。
A.惯性环节B.积分环节C.振荡环节D.延滞环节5.相位差随频率变化的特性称为相频特性。
()A.正确B.错误6.PD调节器又称为()。
A.比例—积分调节器B.比例—微分调节器C.积分调节器D.微分调节器7.在离散控制系统中采用()来恢复离散信号。
A.零阶保持器B.一阶保持器C.二阶保持器D.高阶保持器8.劳斯阵列表第一列有负数,说明系统是稳定的。
()A.正确B.错误9.如果极限环内外的相轨迹曲线都收敛于该极限环,则该极限环为()。
A.稳定极限环B.不稳定极限环C.半稳定极限环D.振荡极限环10.根轨迹终止于()。
A.开环极点B.开环零点C.闭环极点D.闭环零点第1卷参考答案一.综合考核1.参考答案:A2.参考答案:D3.参考答案:A4.参考答案:D5.参考答案:A6.参考答案:B7.参考答案:A8.参考答案:B9.参考答案:A10.参考答案:B。
夏德钤《自动控制原理》(第4版)-名校考研真题-第2章 线性系统的数学模型【圣才出品】
圣才电子书
【答案】C
十万种考研考证电子书、题库视频学习平 台
二、填空题
1.系统的微分方程是 输入量,该系统是______。[南京邮电大学研]
其中 c(t)为输出量,r(t)为
【答案】线性系统
【解析】由于系统的微分方程中没有交叉项,也没有高于一次的项,满足线性系统要
即
于是该系统的传递函数模型为
10.由运算放大器组成的控制系统模拟电路如图 2-7 所示,求闭环传递函数 [中科院研]
8 / 28
圣才电子书
十万种考研考证电子书、题库视频学习平 台
图 2-7 解:设第一个运算放大器的输出电压为 ,第二个运算放大器的输出电压为 ,则可 以得到:
求,为线性系统。
2.函数
的拉氏变换式是______。[华南理工大学 2006 年研]
【答案】3/(s+6)
3.积分环节的传递函数表达式为 G(s)=______。[华南理工大学 2006 年研] 【答案】
三、计算题 1.试判断下列用微分方程描述的系统是线性系统还是非线性系统?[大连理工大学研]
解:(1)线性系统; (2)非线性系统; (3)非线性系统; (4)非线性系统。
解:(1)
图 2-3
6.已知 解:
,求
[大连理工大学研]
7.某系统如图 2-4 所示,已知: 研]
,试确定
[大连理工大学
解:由
图 2-4 在零初始条件下两边同时拉普拉斯变换并整理得
6 / 28
圣才电子书
十万种考研考证电子书、题库视频学习平 台
8.设定描述系统的微分方程。图 2-5 中 B 是阻尼器摩擦因数, 是弹簧的弹性系
自动控制原理第二章习题答案

第二章习题答案名词解释1.一阶系统:以一阶微分方程作为运动方程的控制系统。
2.二阶系统:能够用二阶微分方程描述的系统。
3.应用函数方框把控制系统的全部变量联系起来以描述信号在系统中流通过程的图示。
4. 应用节点、支路把控制系统的全部变量联系起来以描述信号在系统中流通过程的图示。
5.初始条件为零时,线性定常系统或元件输出信号的拉氏变换与输入信号的拉氏变换的比。
6.从源点到阱点的通路上,通过任何节点不多于一次,称为前向通路。
7. 既有输入支路又有输出支路的节点。
8.动态模型:描述变量各阶导数之间关系的微分方程。
9.静态数学模型:在静态条件下(即变量各阶导数为零),描述变量之间关系的代数方程 。
简答1.能够提高的稳定裕度,抑制超调,但对噪声信号具有较高的增益。
2.比例微分(PD )控制和测速(微分)反馈。
3.a.系统是线性定常;b.零初始条件。
4.时域中常用的数学模型有微分方程、差分方程、和状态方程;复数域中有传递函数、结构图;频域中有频率特性等。
计算题1.解:通过比较点前移串倒数,引出点后移串倒数得31313322113211)()(H H G G H G H G H G G G G s R s C ++++=2.解:利用复阻抗的概念)(1/1/1)(2s U CsR Ls Cs s U ++= 则,传递函数为11)(1)(22++=RCs LCs s U s U 3.解:2条前向通道:4123211G G P G G G P == 5个回路: 415244232332121211G G L H G L H G G L G G -G L -=-=-==-=H G G L不存在不接触回路。
故,有:GG H G H G G G G G H G G L L L L L 124232321121543211)(1+++++=++++-=∆5个回路均与2个前向通道相接触,于是: 1 121=∆=∆ ()41242323211214132122111G G G G G P P 1P R(S)C(S)G G H G H G G G G G H G G ++++++=∆+∆∆== 4. 解:输入的拉氏变换:s s R /1)(= 输出的拉氏变换:11211)(+++-=s s s s C 则传递函数为: 22111)()()(+++-==s s s R s C s G 5.解:利用复阻抗的概念,有:)(1//)(212s U R CsR R s U r c += 所以,2212)1()1(11//)()(112122112212++=+++=++=+=s s R Cs R R Cs R R R Cs R R R R Cs R R s U s U r c 6 解:利用复阻抗的概念,有:)(1//)(212s U R CsR R s U r c += 所以,21)1()1(11//)()(112122112212++=+++=++=+=s s R Cs R R Cs R R R Cs R R R R Cs R R s U s U r c 7. 解:将G 3(S) 和G 4(S)两方框之间的引出点后移得:传递函数1432134323243211)()(H G G G G H G G H G G G G G G s R s C +++= 8. 解:对方程求拉氏变换,即得传递函数: 25.10125.0)(+=s s G。
大连理工自动控制原理习题答案
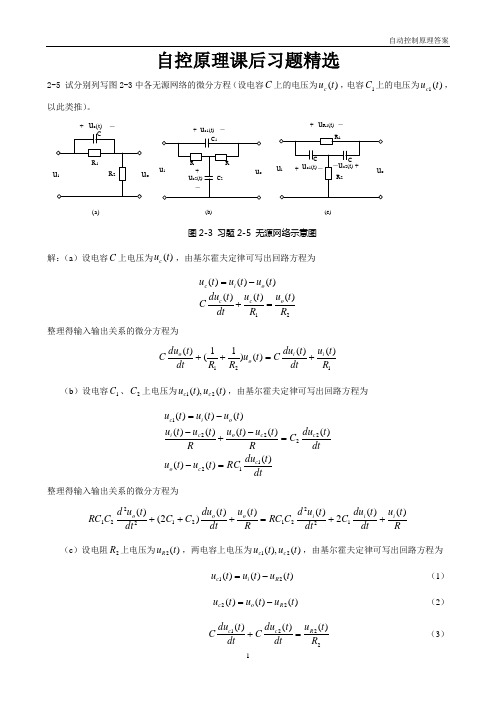
自动控制原理课后习题答案编辑者:潘学俊 第二章2.1 试分别写出图2.68中各无源电路的输入u r (t )与输出u c (t )之间的微分方程。
图2.68 习题2.1图解:(a)11r c u u i R -=,2()r c C u u i -= ,122c u i i R +=,12122121212c c r r R R R R R Cu u Cu u R R R R R R +=++++(b)11()r c C uu i -= ,121r u u i R -=,1221i i C u+= ,121c u i R u =+, 121211122112121121()()c c c r r r R R C C uR C R C R C u u R R C C u R C R C u u ++++=+++ (c)11r cu u i R -=,112()r C u u i -=,1122u i i R +=,1121c u i dt u C =+⎰, 121212222112122221()()c c c r r r R R C C uR C R C R C u u R R C C u R C R C u u ++++=+++ 2.2 试证明图 2.69(a)所示电路与图 2.69(b)所示的机械系统具有相同的微分方程。
图2.69(b)中X r (t )为输入,X c (t )为输出,均是位移量。
(a) (b)图2.69 习题2.2图解:(a)11r cu u i R -=,12()r c C uu i -= ,12i i i +=,221c u idt iR C =+⎰, 121211122212121122()()c c c r r r R R C C uR C R C R C u u R R C C u R C R C u u ++++=+++ (b)2121()c B xx K x -= ,1121()()()r c r c c B x x K x x B x x -+-=- , 121221212121211212()()c c c r r r B B B B B B B B Bx x x x x x K K K K K K K K K ++++=+++ 2.3 试分别求出图2.70中各有源电路的输入u r (t )与输出u c (t )之间的微分方程。
大连理工自动控制原理本科第2章习题
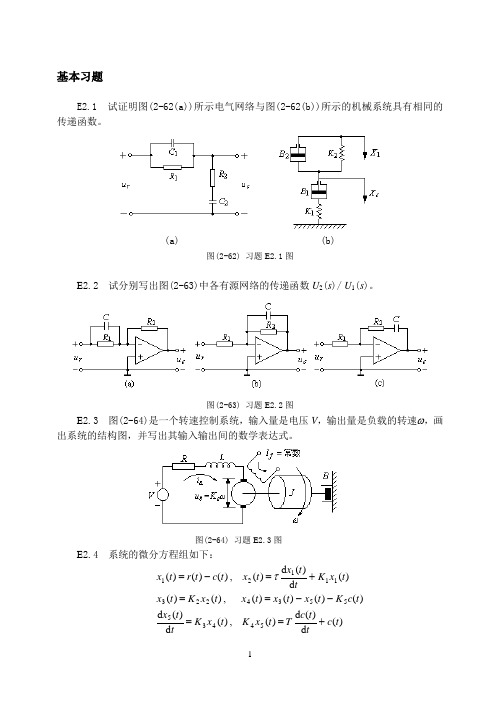
基本习题E2.1 试证明图(2-62(a))所示电气网络与图(2-62(b))所示的机械系统具有相同的传递函数。
(a) (b)图(2-62) 习题E 2.1图E 2.2 试分别写出图(2-63)中各有源网络的传递函数U 2(s )/ U 1(s )。
图(2-63) 习题E 2.2图E 2.3 图(2-64)是一个转速控制系统,输入量是电压V ,输出量是负载的转速ω,画出系统的结构图,并写出其输入输出间的数学表达式。
图(2-64) 习题E 2.3图 E 2.4 系统的微分方程组如下:)(d )(d )( , )(d )(d )()()()( , )()()(d )(d )( , )()()(54435553422311121t c tt c T t x K t x K t t x t c K t x t x t x t x K t x t x K tt x t x t c t r t x +==--==+=-=τ其中τ,K1,K2,K3,K4,K5,T均为正常数。
试建立系统r(t)对c(t)的结构图,并求系统传递函数C(s)/R(s)。
E2.5 试简化图(2-65)中各系统结构图,并求传递函数C(s)/R(s)。
图(2-65) 习题E2.5图E2.6 试用梅逊公式求解习题E2.5所示系统的传递函数C(s)/R(s)。
E2.7 已知系统结构如图(2-66)所示,试求出C(s)/R(s)。
图(2-66) 习题E2.7图一般习题P2.1 图(2-67)是一个模拟调节器的电路示意图。
(a)写出输入u r与输出u c之间的微分方程;(b)建立该调节器的结构图;(c)求闭环传递函数U c(s)/U r(s)。
图(2-67) 习题P2.1图P2.2 某弹簧的力-位移特性曲线如图(2-68)所示。
在仅存在小扰动的情况下,当工作点分别为x0 =-1.2、0、2.5时,试计算弹簧在工作点附近的弹性系数。
图(2-68) 习题P2.2图P2.3 试求图(2-69)所示结构图的传递函数C(s)/R(s)。
自动控制原理作业题 (后附答案)

自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EΘrUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
3 某RC 电路网络原理图如图所示,电压()i u t 为输入量,()o u t 为输出量,试画出其方块图,并求其传递函数。
自动控制原理孟华第二版课后答案
自动控制原理孟华第二版课后答案【篇一:自动控制原理_孟华_习题答案大连理工】t>第一章(略)第二章2.1 试分别写出图2.68中各无源电路的输入ur(t)与输出uc(t)之间的微分方程。
图2.68 习题2.1图解:(a)ur?ucurrrrr2?c?uc?12cu?r??r?u?c)?i2,i1?i2?c,12cu?i1,c(uurr1r2r1?r2r1?r2r1?r2(b)?r?u?c)?i1,c1(uur?u1?1,uc?i1r2?u1, ?i2,i1?i2?c2ur1??c?(r1c1?r1c2?r2c1)u?c?uc?r1r2c1c2u??r?(r1c1?r2c1)u?r?u r r1r2c1c2u(c)u1ur?uc?i1,c1(ur?u1)?i2,i1?i2?1,uc?i1dt?u1, r1r2c2???c?(rc????r1r2c1c2u12?r2c2?r2c1)uc?uc?r1r2c1c2ur?(r2c2?r2c1)ur?ur2.2 试证明图2.69(a)所示电路与图2.69(b)所示的机械系统具有相同的微分方程。
图2.69(b)中xr(t)为输入,xc(t)为输出,均是位移量。
(a)(b)图2.69 习题2.2图解:(a)1ur?uc?r?u?c)?i2,i1?i2?i,uc??i1,c1(uidt?ir2,r1c2???c?(r1c1?r1c2?r2c2)u?c?uc?r1r2c1c2u??r?(r1c1?r2c2)u?r?u r r1r2c1c2u(b)?c?x?1)?k2x1,b1(x?r?x?c)?k1(xr?xc)?b2(x?c?x?1), b2(x b1b2bbbbbbb??c?(1?2?2)x?c?xc?12??r?(1?2)x?r?xrxxk1k2k1k2k1k1k2k1k22.3 试分别求出图2.70中各有源电路的输入ur(t)与输出uc(t)之间的微分方程。
自动控制原理第2章课后习题及解答
+
1 C2R2
uc
=
du
2 r
dt 2
+
2 CR
dur dt
+
1 C2R2
ur
(c) 由图解 2-2(c)可写出
Ur (= s) R1 [I1(s) + I2 (s)] + (Ls + R2 )I2 (s) (6)
1 Cs
I1
(s)
=
(Ls
+
R2
)I2
(s)
(7)
U c (s) = R2 I 2 (s)
第 2 章习题及解答
2-1 建立图 2-32 所示各机械系统的微分方程(其中 F (t) 为外力,x(t) 、y(t) 为位移; k 为弹性系数, f 为阻尼系数, m 为质量;忽略重力影响及滑块与地面的摩擦)。
图 2-32 系统原理图
解. (a)以平衡状态为基点,对质块 m 进行受力分析(不再
考虑重力影响),如图解 2-1(a)所示。根据牛顿定理可写出
2
2
X (s=)
e−s s2
(s
+
1) 2
−
e−3s s2
(2s
+
1) 2
(c) x(t) = a + (b − a)(t − t1 ) − (b − c)(t − t2 ) − c(t − t3 ) X (s) = 1 [a + (b − a)e−t1s − (b − c)e−t2s − ce−t3s ] s
k1k 2
k1 k2 k1
图解 2-3(a)
(b) 由图可写出
Uc (s) =
Ur (s)
R2
自动控制原理部分习题参考答案胥布工
⾃动控制原理部分习题参考答案胥布⼯《⾃动控制原理》部分习题参考答案第1章1-4 有差系统。
1-5 接线端1接地,2与4相连,3接地,5不需连接。
1-8 (1)略;(2)⽆差系统。
第2章2-1 (a) 1)(1)()()()(G 222111221212211221210+++++++==s C R C R C R s C C R R s C R C R s C C R R s U s U s i (b) 212211 2120111)()()(G C C s C LC C Lss C s C s C s U s U s i ++=++== (c) s C R s C R C R C R s C C R R s U s U s i 111323122213201)()()()(G ++++-== (d )sC R s C R C R s C C R s U s U s i 2121112212101)()()()(G +++-== 2-2 (a )1)(1)()()()(12221122121221122121+++++++==s k f k f k f s k k f f s k fk f s k k f f s Y s Y s G i o (b )k s f f Ms s F s Y s G o +++==)(1)()()(212 2-3 )()()()()()(1221222122N N l s l s J J l ls M s s G =+++==ββθ2-4 )1)(1()()()(G 221122++==s C R s C R R s Q s H s i ,其中,1R 和2R 分别为在各⾃⼯作点的参数(液阻)。
2-5 1)()()()(G 2212112212122++++==s C R C R C R s C C R R R s Q s H s i ,其中,1R 和2R 分别为在各⾃⼯作点的参数(液阻)。
自动控制原理-大连理工2022年春期末考试复习题
机密★启用前大连理工大学网络教育学院2022年春《自动控制原理》期末考试复习题☆注意事项:本复习题满分共:200分。
一、选择题1、为了降低扰动引起的稳态误差,应该()。
A.增大扰动作用点之后的前向通道放大系数B.减小扰动作用点之后的前向通道放大系数C.增大扰动作用点之前的前向通道放大系数D.减小扰动作用点之前的前向通道放大系数2、稳定的一阶系统对阶跃输入信号的响应是()。
A.振荡的过程 B.指数飞升过程C.有超调的 D.无阻尼的3、信号流图中不含有()。
A.节点 B.方框C.支路 D.增益4、将连续信号经过采样并变换成离散的数字信号的转换环节称为()。
A.模-数转换器 B.数-模转换器C.信号转换器 D.离散转换器5、对于同一系统,采用超前校正的系统带宽()采用滞后校正的系统带宽。
A.大于 B.小于C.等于 D.小于或等于6、系统开环传递函数为51()(1)sG ss s+=+,则系统的开环零点为()。
A.1 B.-0.5 C.5 D.-0.27、控制系统开环传递函数为1()()(1)(2)(3)G s H s s s s s =+++,则该系统根轨迹有( )条渐近线。
A .1 B .2C .3D .48、( )是单位阶跃信号对时间的一阶导数。
A .单位正弦信号B .单位脉冲信号C .单位抛物线信号D .单位斜坡信号9、某系统开环传递函数为10()(1)G s s s =+,则当输入为2()43r t t =+时,系统的稳态误差为()。
A .10 B .0.1C .2.5D .∞10、单位阶跃函数1()t 的Z 变换为( )。
A .1[1()]Z t z =B .1[1()]1Z t z =-C .[1()]1zZ t z =- D .[1()]1Z t =答案:1. C 2. B 3. B 4. A 5. A6. D 7. D 8. B 9. D 10. C二、判断题1、传递函数和微分方程一样,都可以表征系统的动态特性。
自动控制原理+课后答案.
(1)
(2)
(2)代入(1),整理得传递函数为
(b)由图得
(1)
(2)
整理得传递函数为
(c)由图得
(1)
(2)
(3)
(4)
整理得传递函数为
2-8 试简化图2-6中所示系统结构图,并求传递函数 和 。
解:(a)
⑴求传递函数 ,按下列步骤简化结构图:
1 令 ,利用反馈运算简化如图2-8a所示
求系统传递函数
由信号流图2-10b可见,从源节点 到阱节点 之间,有一条前向通路,其增益为
有三个相互接触的单独回路,其回路增益分别为
, ,
与 互不接触
流图特征式为
由于前向通路与所有单独回路都接触,所以余因子式
根据梅森增益公式,得系统闭环传递函数为
3-3已知二阶系统的单位阶跃响应为 ,试求系统的超调量 ,峰值时间 和调节时间 。
②实轴上根轨迹区间为
③根轨迹的渐近线条数为 , ,
④分离点方程为
解得分离点
根轨迹如下图4-2d所示:
4-6已知单位反馈系统的开环传递函数为:范围。
解:由题得
开环极点: 和
开环零点:
分离、会合点:从 平面的零点、极点分布可知在区间内 可能有分离、会合点。
解:
(1)对于题5-4的系统,分 和 的两种情况来讨论系统的闭环稳定性。
当 时,系统的开环幅相曲线如图5-4a所示,由图可知,系统的开环幅相曲线不包围 ,根据奈奎斯特判据可得
又由系统得开环传递函数可知
即 ,闭环系统在 右半平面无极点, 时闭环系统稳定。
当 时,系统的开环幅相曲线如图5-4b所示,由图可知,
解:
由题目可知,系统的频率特性如下
大连理工大学自动控制原理
R (s ) E (s )
G (s )
C (s )
- B (s )
H (s )
图3-1 控制系统
R( s ) E ( s) ≡ R( s) − B( s) = 1 + G ( s) H ( s)
误差的时间响应: 误差的时间响应 3. 稳态误差
−1 −1
R( s ) e(t ) = L [E ( s )] = L 1 + G( s) H ( s)
G2 ( s )
2. 开环传递函数 令 N ( s ) = 0 , 则典型控制系统的开环传递函数为 B( s) = G1 ( s )G2 ( s ) H ( s ) E ( s) B( s) C ( s) = = G1 ( s )G2 ( s ) 当 H ( s) = 1 时 , E ( s) E ( s) 3. 闭环传递函数 输入信号作用下: ① 输入信号作用下 R ( s ) ≠ 0 , N ( s ) = 0 C ( s) G1 ( s )G2 ( s ) φ ( s) = = R ( s ) 1 + G1 ( s )G2 ( s ) H ( s ) 扰动作用下: ② 扰动作用下 R ( s ) = 0 , N ( s ) ≠ 0 C ( s) G2 ( s ) = φn ( s ) = N ( s ) 1 + G1 ( s )G2 ( s ) H ( s )
《自动控制原理》 自动控制原理》
复习提纲
适用于《控制理论与控制工程》学科2004年 硕士研究生入学考试
1
第一章 基本概念
自动控制: 一.自动控制:在没有人直接参与的情况下,通过控制器,使被控 自动控制 在没有人直接参与的情况下,通过控制器 对象或过程自动地按预定的规律运行。 对象或过程自动地按预定的规律运行。 二. 控制方式 1.开环控制 控制器与被控对象之间只有顺向作用而没有反 开环控制: 开环控制 向联系的控制过程. 向联系的控制过程 其特点是 ① 系统的控制精度取决于各元件的精度及参数的稳定性; ② 误差不能靠系统本身来克服; 结构比较简单; ③ 结构比较简单; 不存在稳定性问题。 ④ 不存在稳定性问题。
自动控制原理习题集及其解答

自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0sin 22=++θθθmg dt d al dtd ml (2-1)此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。
自动控制原理参考答案-第2章

La ⎧ ⎪Tl = R a ⎪ JRa ⎪ ⎪Tm = C C e m ⎪ ⎨ ⎪ K = 2k1 H 0 ⎪ 1 k2 ⎪ 2F H 0 ⎪ ⎪T1 = k2 ⎩
题 2-8:试用动态结构图简化方法求解题 2-8 图所示两系统的传递函数。
u2
L R ia
+
u i(t)
+
u d (t)
+
Ea
M m(t)
J1
f1 r 1 f2
-
-
-
ω1 r2
M c(t)
+ if 题 2-5 图
ω2
J2
电枢控制直流电动机拖动开环系统
(1) ud (t ) = 2.34U 2 {0.82 − 0.57[ K1ui (t ) − 35o ]} = 2.34U 2 {1.168 − 0.57 K1ui (t )} (2) 参照教材 38 页图 2-24 (3) 参照教材式(2-4)、(2-5)、(2-6)、(2-17) 2.73U 2 ⎧ ′ ( s) = M c ( s) / i ⎧M c − 1.34 K1U 2U i ( s) ⎪U d ( s ) = s ⎪ ⎪ ⎪i = r2 / r1 ⎪ LsI ( s ) + RI ( s ) + C Ω ( s ) = U ( s ) 其中, ⎨ a e 1 d ⎨ a 2 ⎪ J = J1 + J 2 / i ⎪ M ( s ) = Cm I a ( s ) ⎪ f = f + f / i2 ⎪ 1 2 ⎩ ′ ( s) ⎪ ⎩ JsΩ1 ( s ) + f Ω1 ( s ) = M ( s ) − M c
⇒
[iJLs 3 + (iJR + ifL) s 2 + (ifR + iCmCe ) s ]Ω1 ( s ) = 2.73CmU 2 − 1.34 K1CmU 2 sU i ( s ) − ( Ls + R ) M c ( s )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基本习题
E2.1 试证明图(2-62(a))所示电气网络与图(2-62(b))所示的机械系统具有相同的传递函数。
(a) (b)
图(2-62) 习题E 2.1图
E 2.2 试分别写出图(2-63)中各有源网络的传递函数U 2(s )/ U 1(s )。
图(2-63) 习题E 2.2图
E 2.3 图(2-64)是一个转速控制系统,输入量是电压V ,输出量是负载的转速ω,画出系统的结构图,并写出其输入输出间的数学表达式。
图(2-64) 习题E 2.3图 E 2.4 系统的微分方程组如下:
)(d )(d )( , )(d )(d )()()()( , )()()(d )(d )( , )()()(54435553422311121t c t
t c T t x K t x K t t x t c K t x t x t x t x K t x t x K t
t x t x t c t r t x +==--==+=-=τ
其中τ,K1,K2,K3,K4,K5,T均为正常数。
试建立系统r(t)对c(t)的结构图,并求系统传递函数C(s)/R(s)。
E2.5 试简化图(2-65)中各系统结构图,并求传递函数C(s)/R(s)。
图(2-65) 习题E2.5图
E2.6 试用梅逊公式求解习题E2.5所示系统的传递函数C(s)/R(s)。
E2.7 已知系统结构如图(2-66)所示,试求出C(s)/R(s)。
图(2-66) 习题E2.7图
一般习题
P2.1 图(2-67)是一个模拟调节器的电路示意图。
(a)写出输入u r与输出u c之间的微分方程;
(b)建立该调节器的结构图;
(c)求闭环传递函数U c(s)/U r(s)。
图(2-67) 习题P2.1图
P2.2 某弹簧的力-位移特性曲线如图(2-68)所示。
在仅存在小扰动的情况下,当工作点分别为x0 =-1.2、0、2.5时,试计算弹簧在工作点附近的弹性系数。
图(2-68) 习题P2.2图
P2.3 试求图(2-69)所示结构图的传递函数C(s)/R(s)。
图(2-69) 习题P2.3图
难题
AP2.1 系统的结构如图(2-70)所示。
(a)求传递函数C1(s)/R1(s),C2(s)/R1(s),C1(s)/R2(s),C2(s)/R2(s)。
(b )求传递函数阵G (s )(C (s )=G (s )R (s ),其中C (s )=⎥⎦⎤⎢⎣⎡)()(21s C s C ,R (s )=⎥⎦
⎤⎢⎣⎡)()(21s R s R )。
图(2-70) 习题AP 2.1图
AP 2.2 已知系统结构图如图(2-71)所示。
(a )求传递函数C (s )/R (s )和C (s )/N (s )。
(b )若要消除干扰对输出的影响(即C (s )/N (s )=0),问G 0(s )=?
图(2-71) 习题A P 2.2图。