混合轮系传动比计算(课堂PPT)
《轮系及计算》课件

齿轮的几何参数
齿数:齿轮的 齿数是决定齿 轮传动比的重
要参数
模数:齿轮的 模数是决定齿 轮尺寸的重要
参数
齿距:齿轮的 齿距是决定齿 轮传动精度的
重要参数
齿形角:齿轮 的齿形角是决 定齿轮传动效 率的重要参数
齿轮的传动比
齿轮传动比:两个齿轮的齿数之比 传动比公式:i=n1/n2,其中i为传动比,n1和n2分别为主动轮和从动轮的齿数 传动比的作用:改变转速和扭矩 传动比的选择:根据实际需求选择合适的传动比,以实现预期的转速和扭矩
05 轮系的计算方法
齿轮的啮合关系
齿轮的啮合关系是指两个齿轮在传动过程中相互接触、相互啮合的状态。
齿轮的啮合关系可以分为直齿圆柱齿轮啮合、斜齿圆柱齿轮啮合、人字齿轮啮合等。
齿轮的啮合关系直接影响到传动的平稳性、效率和寿命。 齿轮的啮合关系可以通过计算齿轮的模数、齿数、压力角等参数来确定。
轮系的传动比计算
轮系的设计实例分析
实例一:自行车轮系设计 实例二:汽车传动轮系设计 实例三:工业机器人轮系设计 实例四:航空航天轮系设计 实例五:医疗设备轮系设计 实例六:家用电器轮系设计
感谢您的观看
汇报人:
06 轮系的设计与优化
齿轮的设计原则
齿形选择: 根据使用 环境和负 载选择合 适的齿形
齿数选择: 根据传动 比和转速 选择合适 的齿数
齿宽选择: 根据载荷 和强度要 求选择合 适的齿宽
齿距选择: 根据传动 精度和噪 音要求选 择合适的 齿距
齿面硬度: 根据使用 环境和载 荷选择合 适的齿面 硬度
04 轮系的工作原理
齿轮的工作原理
齿轮的组成:齿数、模数、齿 距、齿形等
齿轮的传动原理:通过啮合传 递动力和运动
机械工程基础教案课件-轮系、传动比计算-4
【新课讲授】:一、轮系的概念凡由两个以上的齿轮、摩擦轮、带轮或链轮等相互连接成一系统,并将一轴的动力传给其他轴,这样的传动系统称为轮系。
轮系中,最先转动的轮称主动轮;最后转动的轮称为末轮;二、轮系的应用及特点的种类按轮系传动时,各齿轮的几何轴线位置是否相对固定,轮系可分为定轴轮系、周转轮系和混合轮系三大类。
⒈定轴轮系:几何轴线位置均是相对固定的。
2.周转轮系运转时,周转轮系中至少有一个齿轮的几何轴线的位置是不固定的,而是绕另一个齿轮的固定轴线转动。
周转轮系分行星轮系与差动轮系两种。
行星轮系:至少有一个中心轮的转速为零,如视频。
差动轮系:中心轮转速都不为零。
3.混合轮系:在轮系中,既有定轴轮系又有周转轮系。
三、轮系的应用及特点1.用于换向机构换向机构是用来改变从动轮转向的机构。
⒉用于变速机构变速机构是用来改变从动轮转速的机构。
⒊用作较远距离的传动采用轮系传动,可使其结构紧凑,并能进行远距离的传动。
4.获得很大的传动比5.可实现运动的合成与分解采用差动轮系可以将两个独立的回转运动合成为一个回转运动,也可将一个回转运动分解为两个独立的回转运动。
定轴轮系的传动比及相应计算一、定轴轮系的传动比定轴轮系的传动比是指轮系中首末两轮的转速(或角速度)之比。
定轴轮系传动比的计算包括计算轮系传动比的大小和确定末轮的回转方向。
⒈定轴轮系传动比的计算定轴轮系传动比公式为:式中m —轮系中从轮1 到轮k 之间外啮合齿轮的对数。
3.定轴轮系齿轮传动中齿轮旋转方向的表示主从动轮的转向关系可用箭头标注法或“±”法确定。
3. 惰轮的应用在轮系中,既为前一级齿轮副中的从动轮,又为后一级齿轮副中的主动轮,这样的齿轮称为惰轮。
惰轮齿数的多少对轮系的总传动比没有影响,但却可以改变轮系中从动轮的回转方向。
二、定轴轮系传动比的应用1.计算轮系中任意齿轮的转速设轮系中首轮转速为n1,末轮转速为nk,由轮系的传动比计算式可知:例1 在如图12-2-2 所示的定轴轮系中,已知z1 = 30,z2 =40,z2′= 20,z3 = 40,z3′= 2,z4 = 20,齿轮1 的转速为n1 = 1 200 r/min,求蜗轮的转速n4。
轮系及其传动比计算
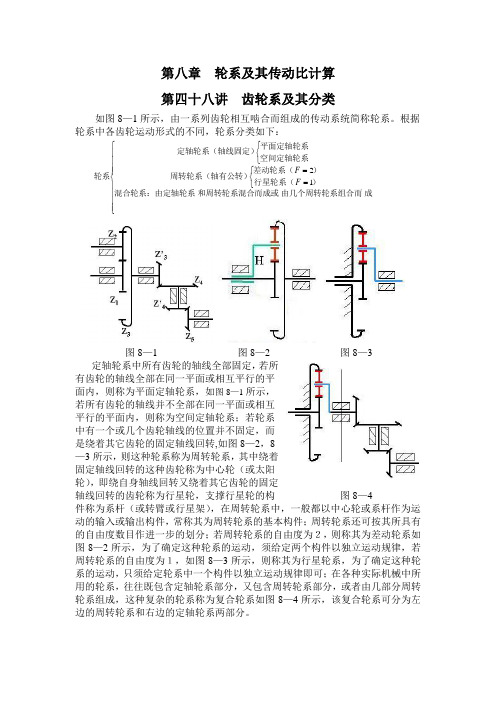
第八章 轮系及其传动比计算第四十八讲 齿轮系及其分类如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。
根据轮系中各齿轮运动形式的不同,轮系分类如下:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧⎩⎨⎧==⎩⎨⎧成由几个周转轮系组合而和周转轮系混合而成或混合轮系:由定轴轮系)行星轮系()差动轮系(周转轮系(轴有公转)空间定轴轮系平面定轴轮系定轴轮系(轴线固定)轮系12F F图8—1 图8—2 图8—3 定轴轮系中所有齿轮的轴线全部固定,若所有齿轮的轴线全部在同一平面或相互平行的平面内,则称为平面定轴轮系,如图8—1所示,若所有齿轮的轴线并不全部在同一平面或相互平行的平面内,则称为空间定轴轮系;若轮系中有一个或几个齿轮轴线的位置并不固定,而是绕着其它齿轮的固定轴线回转,如图8—2,8—3所示,则这种轮系称为周转轮系,其中绕着固定轴线回转的这种齿轮称为中心轮(或太阳轮),即绕自身轴线回转又绕着其它齿轮的固定轴线回转的齿轮称为行星轮,支撑行星轮的构 图8—4件称为系杆(或转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图8—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图8—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图8—4所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。
第四十九讲 定轴轮系的传动比1、传动比大小的计算由前面齿轮机构的知识可知,一对齿轮:i 12 =ω1 /ω2 =z 2 /z 1对于齿轮系,设输入轴的角速度为ω1,输出轴的角速度为ωm ,按定义有:i 1m =ω1 /ωm当i 1m >1时为减速, i 1m <1时为增速。
《机械原理》 轮系的传动比
原周转轮系角速度
1 2
3
H
转化轮系中的角速度
1H 1 H 2H 2 H
3H 3 H
HH H H 0
2.传动比计算的基本思路与方法
根据定轴轮系传动比的公式,可写出转化轮系传动比
iH
13
i1H3
1H 3H
1 H 3 H
z2z3 z1 z 2
z3 z1
“-”号表示在转化机构中1H
z3 z1
2.2 周转轮系传动比的计算
1.周转轮系的组成与类型 2.传动比计算的基本思路与方法 3.注意事项 4.计算实例
例1 已知:双排外啮合行星轮系
z1 100, z2 101, z2 100, z3 99
求:传动比 iH1
解:
i1H3
1H
H 3
1 3
H H
z2 z3 z1 z2
第7章 轮系
1 轮系的类型 2 轮系的传动比 3 轮系的功能 4 轮系的设计 5 其他类型的行星传动简介
第7章 轮系
2 轮系的传动比
2.1 定轴轮系传动比的计算 2.2 周转轮系传动比的计算 2.3 混合轮系传动比的计算
2.1 定轴轮系传动比的计算
1.传动比大小的计算 2.主、从动轮转向关系的确定
只起改变方向作用
称为惰轮
定 轴 轮 系 的 传 动 比
所 有 从 动 轮 齿 数 的 连 乘积 所 有 主 动 轮 齿 数 的 连 乘积
2.1 定轴轮系传动比的计算
2 .传动比方向的确定
平面定轴轮系 所有齿轮均为直齿或斜齿圆柱齿轮,
可用(-1)m 来确定从动轮的转动方向。
m —— 外啮合的对数。
传动比为正,说明主、从动轮转向
轮系及传动比计算-精品课件

三、师生共研 难点突破
1、掌握传动路线,理解主动轮、从动轮
动力输出 Ⅲ
3 Ⅱ
1
动力输入 Ⅰ
4 2
例1 如图1所示轮系,分析该轮系传动路线。
Ⅰ
n1
Ⅱ
Ⅳ Ⅲ
Ⅴ
Ⅵ
n9
图1 轮系
解:该轮系传动路线为
2、传动比计算
轮系的传动比等于首轮与末轮的转速之比。
轮系的传动比:
即
i总
n首 n末
n1 n4
所有从动轮齿数的连乘积 所有主动轮齿数的连乘积
若以1表示首轮,以k轮表示末轮,外啮合的对数为m。 当结果为正,表示首末两轮回转方向相同。 当结果为负,表示首末两轮回转方向相反。
本式只适用于平行定轴轮系,有蜗杆和锥齿轮时不用(-1)的m次方
例2 如图2所示轮系,已知各齿轮齿数及n1转向, 求i19和判定n9转向。
n1
Ⅰ
Ⅱ
解:
即i19
(1)4
z3 z5 z7 z9 z1 z4 z6 z8
3
1 5
2 4
Ⅲ
Ⅳ6 轮回转方向相同。
四、学生展示 重点点拨
下图所示定轴轮系中,已知:n1=1440r/min,各齿轮齿数分别 为Z1=Z3=Z6=18, Z2=27, Z4=Z5=24, Z7=81,试求末轮7的转速n7, 并用箭头在图上标明各齿轮的回转方向。
n1
五、本课小结
定轴轮系的传动比:首末齿轮转速之比,等于轮系中各对啮 合齿轮传动比的连乘积。
i总
i1k
(1)m
各级齿轮副中从动齿轮 各级齿轮副中主动齿轮
齿数的连乘积 齿数的连乘积
本式只适用于定轴轮系中轴线平行的情况
i1k
第11章 混合轮系

第十一章 轮系及其设计
第四节 混合轮系传动比的计算
一、串联式混合轮系 二、封闭组合式混合轮系 三、叠加组合式混合轮系
混合轮系传动比计算步骤:
1.判别该轮系由几种轮系组成的,各轮系如何连接 2.列出各轮系的传动比计算式 3.根据各基本轮系间的连接关系,将各计算式联立
求解
第四节 混合轮系传动比的计算
一、串联式混合轮系
基本思路 前一个轮系的输出构件与后一基本轮系的输入构件固 接组合而成的混合轮系。 整个混合轮系传动比,等于所串联的各轮系传动比的 连乘积。
第四节 混合轮系传动比的计算
一、串联式混合轮系
例11-4
已知:各轮齿数,n1 = 300 r min 求:系杆H的转速nH的大小和转向 解:
= −4
3.联立求解 nH = −30 r min
第四节 混合轮系传动比的计算
一、串联式混合轮系
二、封闭组合式混合轮系
差动轮系的两个构件和自由度为1的轮系封闭联接,形成一个自 由度为1的混合轮系。 被联接的两个构件间始终保持一定的运动约束关系。 例11-5 已知:各轮齿数
z1 = 24, z2 = 52, z2′ = 21, z3 = 78, z3′ = 18, z4 = 30, z5 = 78
运动合成
iH
13
= n1H n3H
= n1 − nH n3 − nH
= − z3 z1
= −1
z1 = z3
nH = (n1 + n3 ) / 2
应用实例:机床、计算机构和补偿装置等。
第五节 轮系的功能及其应用
三、实现运动的合成与分解 运动分解
nH = (n1 + n3 ) / 2
轮系 ppt课件

19
§3 周转轮系传动比计算
6)周转轮系中带有锥齿轮时,公式右边不能用(-1)m判断正、 负号,只能用画虚箭头的方法判断。
i1H3nn13H H
n1nH n3nH
z2z3 z1z2'
3
2'
2
H
1
20
§3 周转轮系传动比计算
例-2 在图示行星轮系中,各轮齿数
z1=27,z2=17,z3=61。n1=6000 r/min ,求传动
iiii n nn nn nn n 1
2 2
1
3 '44 5 2
2 3
3 ' 4
5 4 z z1 2 z z2 3 z z3 4 ' z z4 5 '
i 15
n1 n5
转 化 前
转 化Байду номын сангаас后
17
§3 周转轮系传动比计算
三、 周转轮系的传动比
构件
原有转速
齿轮 1
n1
在转化轮系中的转速 (即相对于行星架 H 的转速)
n 1H= n 1-n H
齿轮 2
n2
n 2H= n 2-n H
齿轮 3
n3
n 3H= n 3-n H
机架 4
n4= 0
n 4H= n 4-n H
行星架 H
14
§3 周转轮系传动比计算
2、 据基本构件不同分类
2K-H型
3K型
15
§3 周转轮系传动比计算
思路: 把动轴齿轮 定轴齿轮
套用定轴轮系传动比 公式
方法:反转法
2
1H
3
周转轮系混合轮系传动比计算例题培训资料

解: iH1=n H / n 1
i1H4=(n 1 - n H )/ (n 4 - n H ) =1- n 1 / n H =-Z2Z4/Z1Z3
=1- i1H
i1H =-(1-99x101/100x100)=-1/10000
iH1=n H / n 1 =1/i1H =-10000
传动比为负,表示行星架H与齿轮(chǐlún)1的转向 相反。
用画箭头法标出转化(zhuǎnhuà)轮系中各构件的转向关系,如
第二页,共4页。
例5: 如图所=0 ,n2= n2 `
i12
n1 n2
z2 z1
=-2
i1H = n1 /nH = -10
负号说明行星架H与齿轮1转向相反。
第四页,共4页。
负号表示行星(xíngxīng)架与齿轮1转向相反。
2.求n3
:(n3 =
H
i12
n2n)1- n H n 2- n H
Z2 Z1
n 2 = - 133 r/min = n3
负号表示轮3与齿轮(c第h三ǐ页,l共ú4页n。 )1转向相反。
混合轮系传动比的计算
先将混合轮系分解成基本周转轮系和定轴轮系,然后分 别列出传动比计算式,最后(zuìhòu)联立求解。
Z2=25, Z3=20, Z4=60,n1=200r/min,
n4=50r/min,且两太阳轮1、4转向相反。试
求行星(xíngxīng)架转速n H及行星(xíngxīng)
轮解转:速n3。
1.求n H i1H4
清华大学机械原理课件--第5章轮系机构

第5章 轮系
行星轮系(F=1)
差动轮系(F=2)
中心轮是转动,还是固定?
2K-H 型 根据基本构件不同
3K 型
第5章 轮系
单排2K-H 型
双排2K-H 型
3K 型
周转轮系的传动比
第5章 轮系
周转轮系
定轴轮系
?
绕固定轴线转动的系杆
- H H
第5章 轮系
周转轮系的 转化机构
周转轮系
H - H=0
行星搅拌器
第5章 轮系
第5章 轮系
机械手
轮系功能小结
实现分路传动 大传动比 变速、换向 大功率传动 运动的合成与分解 执行构件的复杂运动
第5章 轮系
5.4 轮系的设计
5.4.1 定轴轮系的设计 5.4.2 周转轮系的设计
第5章 轮系
5.4.1 定轴轮系的设计
轮系类型的选择
第5章 轮系
关键点: (1)正确掌握各种齿轮机构的特点和应用场合; (2)明确设计要求; (3)满足要求的前提下机构越简单越好。
混合轮系的传动比
i16 16
33 0.0 1H
300
5.3 轮系的功能
5.3.1 实现分路传动
从动轴1 3
主
从动轴2
动
轴
从动轴n
第5章 轮系
9 8 7
4
5
6
主动轴 2
1
某航空发动机附加系统
第5章 轮系
5.3.2 实现大传动比
第5章 轮系
a
b
定轴轮系
第5章 轮系
第5章 轮系
5.3.3 实现变速和换向
5.4.2 周转轮系的设计
各轮齿数的确定:
11-第11章-轮系PPT课件
即:imH 1 imHn
4. 主从关系视传递路线不同而不同。
绝对传动比
公转
5. 平面轮系中行星轮的运动: 自转
H
H m
绝对转速 m
例二 轮系中, z1=z2=20, z3=60
2
1)轮3固定。求i1H 。
轮1逆转1圈,轮3顺转1圈
H
2)n1=1, n3=-1, 求nH 及i1H 的值。
1
3)n1=-1, n3=1, 求nH 及i1H 的值。 轮1、轮3各逆转1圈
解: 1)划分轮系 ✓齿轮1-2组成定轴轮系部分; ✓齿轮2-3-4-H组成周转轮系部分。
2)计算各轮系传动比
➢定轴轮系部分
i1 2
n1 n2
z2 z1
40 20
2
n 1 2 n 2 (1)
➢周转轮系部分
i
H 24
n2 nH n4 nH
z4 z2
z1=20
H z4=80
z3=30
z2=40 z2=20
定轴轮系 周转轮系
i2H4
n2 nH n4 nH
z4 z2
由 n4 0 , n2 n2 , z2 2 0 , z4 8 0
n2 nH nH
4
z1=20 z3=30
H z4=80
z2=40 z2=20
n 2 = 5 n H (2)
3)将(1)、(2)联立求解
n 1 = - 2 n 2 (1)
其它构件:行星轮。其运动有自转和绕中心轮的公转,类似行星运动,故得名。
由于轮2既有自转又有公转,故不
ω 能直接求传动比 3
2
-ωH
2 ω2
H
3
H
ωH
机械基础 教学最好的PPT 第七章_轮系
§7-4 复合轮系传动比的计算
§7-5 轮系的功用
§7-1 齿轮系及其分类
一、定义:由齿轮组成的传动系统-简称轮系。
在机械设备中,为了获得较大的传动比、或变速和换向,常 常要采用多对齿轮进行传动,如机床、汽车上使用的变速箱、差 速器,工程上广泛应用的齿轮减速器等。这种由多对齿轮所组成 的传动系统称为齿轮系,简称轮系。
(2)求n7和n10
n1 2.5 n7 n1 200 80 (r/min) 故 n7 i17 2.5
因
i17
因 i110 故 n10
n1 100 n10
n1 200 2 (r/min) i110 100
用画箭头的方法表示各轮的转向,如图所示。
例4:如图所示,已知各轮齿数Z1=Z4=18,Z2=36,Z2’=20,Z3=80,Z3’=20,
机床变速箱传动系统
圆椎圆柱齿轮减速器
周转轮系:在下图所示的轮系中,传动时齿轮g的几何轴线绕齿轮a,b 和构件H的共同轴线转动,这样的轮系成为周转轮系。
复合轮系
本章要解决的问题: 轮系的运动分析(包括传动比i 的计算和判断从动轮转向)
§7-2 定轴轮系传动比的计算
一、轮系的传动比 轮系始端主动轮与末端从动轮的转速之比值,称为轮系的 传动比,用 i 表示。 n1
例1. 课本例13-1,P193
一电动提升机的传动系统如图所示。其末端为蜗杆传动。已 知 z1 = 18 , z2 = 39 , z2 = 20 , z3 = 41 , z3' = 2 (右), z4 = 50 。若 n1 = 1460r / min , 鼓轮直径 D = 200mm ,鼓轮与蜗轮同轴。试求:(1)蜗轮的转速;(2) 重 物G的运动速度; (3) 当 n转向如图所示(从A向看为顺时针)时,重物G 1 运动的方向。
行星轮系及其传动比详解PPT课件
例3 如下图所示的轮系中,已知各轮的齿数为:z1=48,z2=48, z2′=18,z3=24,又n1=250 r/min, n3=100 r/min,转向如图所示。 试求系杆的转速nH的大小和方向。
解 由式(5-2)有
i1H3n n13 n nH H
z2z3 z1z2'
将已知齿数和转速代入上式得
复合轮系
§5-2
一. 轮系传动比:轮系 中首、末两齿轮构 件的角速度之比。
定轴轮系及其传动比
iⅠⅢ
Ⅰ Ⅲ
nⅠ nⅢ
上式表示从首齿轮Ⅰ到末齿轮Ⅲ的传动比计算公式。 正负号表示首末齿轮的旋转方向的情况,一致时取正,
否则取负。
§5-2 定轴轮系及其传动比
二.一对齿轮传动方向的确 定(用箭头表示) (动画) 外啮合:方向相反 内啮合:方向相同 锥齿轮:
一般都以太阳轮和系杆作为运动和动力的输入或输出构件,称为基本 构件。
§5-3 周转轮系及其传动比
二.周转轮系的组成: 三.由上面的分析可知,常见的周转轮系,它
由中心轮(太阳轮)、行星轮和行星架(又称 系杆或转臂)H组成。
太阳轮
系杆
行星轮
§5-3 周转轮系及其传动比
三. 周转轮系的分类:
1. 行星轮系:自由度F=1的周转轮系。
行星轮系
§5-3 周转轮系及其传动比
2. 差动轮系:自由度F=2的周转轮系。
差动轮系
§5-3 周转轮系及其传动比
3. 2K-H型行星轮系(根据太阳轮个数的不同分)
§5-3 周转轮系及其传动比
4. 3K-H型行星轮系(根据太阳轮个数的不同分)
周转轮系的种类很多,分类方法也很多,机械设 计手册中可以见到不同类别的周转轮系。
第六章轮系及其传动比计算

第六章轮系及其传动比计算6.1引言轮系是指由若干个齿轮组成的一种传动装置,在机械设备中起着重要的作用。
轮系的传动比是指输入轴和输出轴的转速之比,是轮系设计的重要参数之一、本章将介绍轮系的基本概念和传动比的计算方法。
6.2轮系的基本概念轮系由多个齿轮组成,每个齿轮都有一个输入轴和一个输出轴。
输入轴的转速通过齿轮的啮合传递给下一个齿轮,最终传递到输出轴。
在一个轮系中,有一个输入轴和一个输出轴,其它齿轮都是通过啮合传递转速。
在一个轮系中,齿轮的直径与其转速成反比,即直径越大,转速越小。
齿轮之间的啮合关系可以用一个传动比来描述,传动比是输出轴的转速与输入轴的转速之比。
6.3传动比的计算方法传动比的计算方法可分为两种:直接计算法和间接计算法。
6.3.1直接计算法直接计算法是根据齿轮的齿数和直径来计算传动比。
当一组齿轮串联时,传动比等于每个齿轮的齿数比的乘积。
当一组齿轮并联时,传动比等于每个齿轮的齿数比的和。
例如,一个轮系由两个齿轮组成,第一个齿轮的齿数为20,第二个齿轮的齿数为40。
则传动比为40/20=2使用直接计算法需要知道每个齿轮的齿数,因此适用于已知齿轮参数的情况。
6.3.2间接计算法间接计算法是通过测量轮系的输入轴和输出轴的转速来计算传动比。
该方法通过使用转速计或测速仪来测量转速,然后将测得的输入轴转速和输出轴转速之比作为传动比。
例如,通过测量得到输入轴转速为1000rpm,输出轴转速为500rpm,则传动比为500/1000=0.5间接计算法适用于无法直接测量齿轮参数的情况,但需要准确测量转速。
6.4小结本章介绍了轮系的基本概念和传动比的计算方法。
轮系是由多个齿轮组成的传动装置,传动比是描述轮系传动关系的重要参数。
传动比可通过直接计算法和间接计算法来计算。
直接计算法适用于已知齿轮参数的情况,而间接计算法适用于通过测量转速来计算传动比的情况。
轮系ppt课件

一、任意从动齿轮的转速计算
i1k
n1 nk
zz12zz34zz56 zzkk1
(不考虑齿轮旋转方向)
nk
n1 i1k
n1zz12zz34zz56 zzk k1
.
【例4】已知:z1=26,z2=51,z3 =42, z4=29,z5 =49, z6=36,z7=56,z8=43,z9=30,z10=90, 轴Ⅰ的转速nI = 200 r/min。试求当轴Ⅲ上的三联齿轮分别与轴Ⅱ上的三个 齿轮啮合时,轴Ⅳ的三种转速。
.
【例2】如图所示轮系,已知各程
.
【 例 3】 已 知 z1=24 , z2=28 , z3=20 , z4=60 , z5=20 , z6=20,z7=28,齿轮1为主动件。分析该轮系的传动路线并 求传动比i17;若齿轮1转向已知,试判定齿轮7的转向。
.
行星轮系
中心轮——位于中 心位置且绕轴线回转的 内齿轮或外齿轮。
行星轮——同时与中 心轮和齿圈啮合,既作自 转又作公转的齿轮。
行星架——支承行星 轮的构件。
差动轮系
.
3.混合轮系
在轮系中,既有定轴轮系又有周转轮系。
.
二、轮系的应用特点
1.可获得很大的传动比 2.可作较远距离的传动 3.可以方便地实现变速和变向要求 4.可以实现运动的合成与分解
滑移齿轮变速机构
.
利用中间齿轮变向机构
.
4.可以实现运动的合成与分解
采用行星轮系,可以将两个独立的运动合成为一个 运动,或将一个运动分解为两个独立的运动。
.
§6-2 定轴轮系传动比计算
一、定轴轮系中各轮转向的判断 二、传动比 三、惰轮的应用
.
一、定轴轮系中各轮转向的判断
轮系的传动比
轮系的传动比
图5-14所示的带传动轮系中,设主动轮和从动轮的半径分别为 r1
和 r2 ,转动的角速度分别为1 和2 ,不考虑带厚并假定轮与带间
无相对滑动。由于带上的各点速度大小相等且在轮与带的接触点处
两者应具有相等的速度,可以得到
r11 r22
即两轮的角速度与其半径成反比,转动
方向相同。
解
由于直接啮合的或用链条传动的一对
齿轮,转动的角速度与其齿数成反比,
即 因此得
n1 z2 n2 z1
,
n3 z4 n4 z3
n1 z2 z4 n4 z1 z3
或
z2
n1 n4
z1 z3 z4
图5-17
因为传输带的速度等于轮Ⅴ轮缘上点的速度,而轮Ⅴ的转速等于
轮Ⅳ的转速,于是有
v
D 2
5
D 2
4
D 2
n4 30
或
将 n4代入前式中,得
n4
60v D
z2
n1 z1 z3 z4
D 60v
1 200 24 15 45
3.14 46 60 240
96.3
但齿轮的齿数必须为整数,因此可选取 z2 96 ,这时输送带 的速度将为 v 2.41 m/s ,满足每秒约2.4 m的要求。
理论力学36 20Fra bibliotek5.4
n3
n1 i13
1 450 r/ min 5.4
268.5 r/ min
例5-7
如图5-17所示为一带式轮送机。已知由电动机带动的主动轮Ⅰ的转
速 n1 1 200 r/ min ,其齿数 z1 24 ;齿轮Ⅲ和Ⅳ用链条传动,齿数各 为 z3 15 ,z4 45 ,轮Ⅴ的直径 D 46 cm ,如希望输送带的速度约 为 v 2.4 m/s ,求轮Ⅱ应有的齿数 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
混合轮系传动比计算
宇航十组
Ppt by 郭瑞科 陈磊 苏杰超 主讲 龙毅
无忧PPT整理发布
LOGO
例题 5-1 在图中所示周转轮系中,已知各轮的齿数 为z1=30,z2=25,z2’=20,z3=75。齿轮1的转速为
210r/min(箭头向上),齿轮3的转速为54r/min( 箭头向下),求行星架转速 的大小和方向。
.
6
LOGO
将w3,wH,代入式(a),得
1 -H
136
166
3
3 -H
,齿轮3与齿轮6的转向相反
无忧PPT整理发布
.
7
+
LOGO
例题5-4
如图所示为电动卷扬机的减速器,已知各轮齿数z1 =24,
z2 =48, z2’ =30, z3 =90, z3’ =20, z4 =30, z5 = 80
,试求传动比i1H 。
解:这是一个比较复杂的混合 轮系。由图可知,2-2’是行星轮, 与双联齿轮2-2’啮合的齿轮1和齿 轮3为中心轮,而支持行星齿轮 的为行星架5(H)。
无忧PPT整理发布
Page 8
LOGO
因此齿轮1、2-2’、3和5(H) 组成一个差动轮系,整个轮 系是由一个差动轮系中行星 架和中心轮3封闭起来的封 闭差动轮系。
解:由公式(5-3)知:
根据题意,齿轮1、3转向相 反,若假设 为正,则应 将以负值带入上式,得:
Page 2
无忧PPT整理发布
LOGO
解得:
因为 正号,可知 的转 向和 相同。
在已知 、 或 、 的情况下,利用公式(5-3) 还可容易地算出行星齿轮2的 转速 。
Page 3
无忧PPT整理发布
解:轴线位置不固定的双联齿
轮2-2’是行星轮,与双联齿轮 2-2’啮合的齿轮1和3为中心轮, 而支持行星轮的为行星架H。 因此齿轮1,2-2’,3和H组成一 个差动轮系。由于轮系中再没 有其他的行星轮,所以其余的 齿轮6,1’-1’’,5-5’,4组成一 个定轴轮系。
Page 5
无忧PPT整理发布
LOGO
Page 9
无忧PPT整理发布
LOGO
+ 其中w H =w 5 ,w3=w3’。对于定轴轮系有
z 80 3
5
i - -4 3'5
z 20 5
3'
对差动轮系
联立解得
i1 Hi3 1H 3 1- - HH H1zz1 2 zz 2 3 '31-2 4 4 83 9 0 0-6
正号表明行星架5与齿轮1的转向相同
无忧PPT整理发布
Page 10
谢谢!
周转轮系转化轮系的传动比为
i1H3 1 3H H 1 3-- H Hzz1 2zz23' -3
式中,w1,wH由定轴轮系求得
11 '' 6zz1 6 ''66 20 01 36
H46 z z1 6 ''z z5 1 'z z5 4 ' 6 6 2 6 3 0 0 无4 4 0 0忧 P 5 5 P T1 6 整理6发布
LOGO
显然有
整理得:
带入已知数值( 可求得: 其中负号表示的
、
)
转向与 相反
Page 4
无忧PPT整理发布
例L题OGO5-3 在图示5-9所示轮系中,已知w6和各轮齿数 z1=50,z1’=30,z1’’=60,z2=30,z2’=20,z3=100,z4=45 ,z5=60,z5’=45,z6=20。求w3的大小和方向。