现代信号处理教程 - 胡广书(清华)
胡广书《现代信号处理教程》第一章
1. 傅里叶变换在时间、频率“定位”的不足
如果我们想求一个信号,如 x(t ) ,在某一个频 率,如 0 处的值,则
X ( j0 ) x(t )e j 0t d t
需要
t ~
;
反之,如果我们想求某一个时刻,如 t 0
处的值,需要 ~
1 x(t0 ) 2
a: 是尺度定标常数,决定频率中心及带宽; b: 是位移,决定分析位置; (t ) : 又称为基本小波或母小波。
方法四、信号的子带分解
将信号的频谱均匀或非均匀地分解成若干部分, 每一个部分都对应一个时间信号,我们称它们为 原信号的子带信号 。
H0 ( z)
x ( n)
x0 (n)
M
v0 (n)
“分辨率(resolution)”是信号处理中的基本概念, 能作出辨别的时域或频域的最小间隔(又称最小分辨
细胞)。频率分辨率是通过一个频域的窗函数来观察 频谱时所看到的频率的宽度,时间分辨率是通过一个 时域的窗函数来观察信号时所看到的时间的宽度。显 然,这样的窗函数越窄,相应的分辨率就越好。分辨
能力的好坏一是取决于信号的特点,二是取决于信号
(二)多抽样率信号处理; (三)小波变换; (四)高阶统计量分析; (五)独立分量分析(ICA); (六)压缩感知理论(CS);
现代信号处理这十多年来的新进展
一、Hilbert-Huang变换 二、信号的稀疏表达 (sparse representations) -1998;
-1998;
三、压缩感知 ( compressed sensing,CS) -2006
g ( , ) 1 then
Cohen类分布变成Wigner-Ville分布
现代信号处理--清华胡广书讲义-第6章滤波器组基础
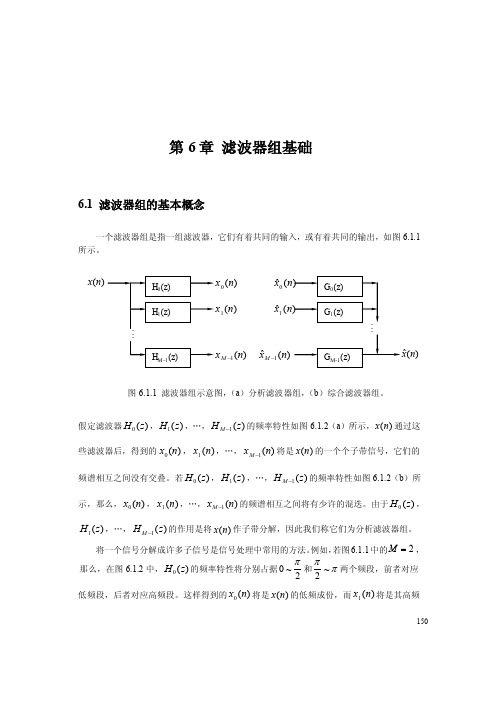
150第6章 滤波器组基础6.1 滤波器组的基本概念一个滤波器组是指一组滤波器,它们有着共同的输入,或有着共同的输出,如图6.1.1所示。
图6.1.1 滤波器组示意图,(a )分析滤波器组,(b )综合滤波器组。
假定滤波器)(0z H ,)(1z H ,…,)(1z H M -的频率特性如图6.1.2(a )所示,)(n x 通过这些滤波器后,得到的)(0n x ,)(1n x ,…,)(1n x M -将是)(n x 的一个个子带信号,它们的频谱相互之间没有交叠。
若)(0z H ,)(1z H ,…,)(1z H M -的频率特性如图6.1.2(b )所示,那么,)(0n x ,)(1n x ,…,)(1n x M -的频谱相互之间将有少许的混迭。
由于)(0z H ,)(1z H ,…,)(1z H M -的作用是将)(n x 作子带分解,因此我们称它们为分析滤波器组。
将一个信号分解成许多子信号是信号处理中常用的方法。
例如,若图6.1.1中的2=M ,那么,在图6.1.2中,)(0z H 的频率特性将分别占据2~0π和ππ~2两个频段,前者对应低频段,后者对应高频段。
这样得到的)(0n x 将是)(n x 的低频成份,而)(1n x 将是其高频)(0n x )(1n x )(1n x M -)(n x(ˆ0x (ˆ1x)(ˆ1n xM -)(ˆn x151成份。
我们可依据实际工作的需要对)(0n x 和)(1n x 作出不同的处理。
例如,若我们希望对)(n x 编码,设)(n x 的抽样频率为20KHz ,若每个数据点用16bit ,那么每秒钟需要的码图6.1.2 分析滤波器组的频率响应,(a )无混迭,(b )稍有混迭流为320Kbit 。
若)(n x 是一低频信号,也即)(n x 的有效成份(或有用成份)大都集中在)(0n x 内,)(1n x 内含有很少的信号能量。
这样,我们可对)(0n x 仍用16bit ,对)(1n x 则用8bit ,甚至是4bit ,由于)(0n x 和)(1n x 的带宽分别比)(n x 减少了一倍,所以,)(0n x 和)(1n x 的抽样频率可降低一倍。
现代信号处理教程 - 胡广书(清华)

- 230 -第8章 M 通道滤波器组8.1 M 通道滤波器组的基本关系图8.1.1是一个标准的M 通道滤波器组。
图8.1.1 M 通道滤波器组由第五章~第七章的讨论,我们不难得到图中各处信号之间的如下相互关系: ()()()k k X z X z H z = (8.1.1)1101111()()1 ()() (8.1.2)M lMk kM l M l lMMMk M l V z XW z M X Wz H W z M-=-===∑∑及 101()()()() M l lMk k Mk M l U z V z X zWH zW M-===∑ (8.1.3)滤波器组的最后输出111ˆ()()()1()()() (8.1.4)M k kk M M llM k M k l k X z G z U z X zW H zW G z M-=--====∑∑∑. . . ˆ()z (X- 231 -令 101()()() (8.1.5)M ll kM k k A z HzW G z M-==∑则 10ˆ()()() (8.1.6)M l l Ml X z A z X zW -==∑ 这样,最后的输出ˆ()X z 是()lMX zW 的加权和。
由于 (2/)()()j lj l M M z e X zW X e ωωπ-== (8.1.7)在0l ≠时是()j X e ω的移位,因此,ˆ()j Xe ω是()j X e ω及其移位的加权和。
由上一章的讨论可知,在0l ≠时,(2/)()j l M X e ωπ-是混迭分量,应想办法去除。
显然,若保证()0 1~1l A z l M ==- (8.1.8)则可以去除图8.1.1所示滤波器组中的混迭失真.再定义1001()()()()M kk k T z A z Hz G z M-==∑ (8.1.9)显然,()T z 是在去除混迭失真后整个系统的转移函数。
这时,ˆ()Xz 是否对()X z 产生幅度失真和相位失真就取决于()T z 的性能。
现代信号处理教程 - 胡广书(清华)

69第3章 Wigner 分布3.1 Wigner 分布的定义我们在第一章讨论了对非平稳信号作时-频联合分析的必要性,在第二章介绍了具有线性形式的时-频分布,如STFT 及Gabor 变换。
这一类形式的时-频分布还有小波变换,我们将在第九章以后详细讨论。
本章及下一章集中讨论具有双线性形式的时-频分布,主要是Wigner 分布及具有更一般形式的Cohen 类分布。
所谓双线性形式,是指所研究的信号在时-频分布的数学表达式中以相乘的形式出现两次。
在有的文献中又称为非线性时-频分布。
令信号()t x ,()t y 的傅立叶变换分别是()Ωj X ,()Ωj Y ,那么,()t x ,()t y 的联合Wigner分布定义为:()()(),,22j x y W t x t y t e d ττττ∞-Ω-∞Ω=+-⎰* (3.1.1)信号()t x 的自Wigner 定义为 ()()(),22j x W t x t x t e d ττττ∞-Ω-∞Ω=+-⎰* (3.1.2)Wigner 于1932年首先提出了Wigner 分布的概念[120],并把它用于量子力学领域。
在之后的一段时间内并没有引起人们的重视。
直到1948年,首先由Ville 把它应用于信号分析。
因此,Wigner 分布又称Wigner -Ville 分布,简称为WVD 。
1973年,DE .Bruijn 对WVD分布作了评述,并给出了把WVD 用于信号变换的新的数学基础[32]。
1966年,Cohen 给出了各种时-频分布的统一表示形式[46],1980年,Classen 在Philips .J .Res .上连续发表了三篇关于WVD 的文章[38,39,40],对WVD 的定义、性质等作了全面的讨论。
由于这些工作,使得80年代后对WVD 的研究骤然引起了人们的兴趣,发表的论文很多,也取得了一些可喜的成果。
由下面的讨论可知,在已提出的各种时-频分布中,WVD 具有最简单的形式,并具有很好的性质。
现代信号处理教程 - 胡广书(清华)

33及 ∑+==NL n nx x d 122),(α(1.7.8)此即信号正交分解的最小平方近似性质。
我们在有限项傅立叶级数的近似中曾经遇到过[19]。
现推导(1.7.7)及(1.7.8)两式。
将(1.7.6)式展开,有∑∑∑∑+-==jj Li i i nnn n x n x x x d 2122))()()((2|)(|),(βϕβ (1.7.9)将上式对k β求偏导,并使之为零,则有02)()(2),(2=+-=∑∂∂k n k x x d n n x kβϕβ及k nk k n n x αββ==∑)()(将此结果代入(1.7.9)式,即得(1.7.8)式。
若空间X 由向量N ϕϕϕ,......,,21张成,即},......,,{21N span X ϕϕϕ=,并有},......,,{211L span X ϕϕϕ=及},......,,{212N L L span X ϕϕϕ++=,我们称1X 和2X 是X 的子空间。
如果:1.021=X X ,即1X 和2X 没有交集;2.21X X X =,即X 是1X 和2X 的并集;这时,我们称X 是1X 和2X 的直和,记作:21X X X ⊕=(1.7.10)这些概念我们将在小波变换中用到。
性质5:将原始信号x 经正交变换后得到一组离散系数N ααα,......,,21。
这一组系数具有减少x 中各分量的相关性及将x 的能量集中于少数系数上的功能。
相关性去除的程度及能量集中的程度取决于所选择的基函数}{n ϕ的性质。
这一性质是信号与图像压缩编码的理论基础。
有关这一点,我们在本节还要继续讨论。
作为正交变换的最后一个性质,由于其重要性,我们现用定理的方式给出:定理 1.2:)(t ϕ是一个原型函数,其傅立叶变换为)(ΩΦ,若)}({k t -ϕ,Z k ∈是一组正交基,则34∑=+ΩΦkk 1|)2(|2π(1.7.11)若)(1k t -ϕ,)(2k t -ϕ是两组正交基,即0)(),(2211>=--<k t k t ϕϕ 21,k k ∀则0)2()2(*21=+Φ+Φ∑kk k πωπω(1.7.12)证明[13,21,8]:因为}),({Z k k t ∈-ϕ是一正交基,设x 是它构成空间中的一个元素,则x 可表示为)(k t -ϕ的线性组合,即∑-=kk k t a x )(ϕ(1.7.13)由性质3,有∑=kkax 22||||||,对(1.7.13)式两边作傅立叶变换,有∑∑⎰Ω-Ω-ΩΦ=-=Ωkjk k ktj k e a j dt ek t a j X )()()(ϕ(1.7.14)注意,该式是傅立叶变换(FT )和离散时间傅立叶变换(DTFT )的混合表达式。
chapter04 清华大学《现代信号处理》讲义-胡广书

1.幅度是中心在(0,0)的高斯信号; 2.在 θ , τ 两个方向上是振荡的,振荡频率 由 Ω 0 , t0 决定 ;注意,Ω 0 , t0 并不影响
AF的中心位置; 3. AF是复函数。
例2
α 2 x(t ) = ∑ exp − α (t − t i ) 2 + jΩ i t i =1 π
结论:Cohen 类的任一成员都可由Wigner分布 得到。
(5)用广义模糊函数表示
M x (θ,τ ) = Ax (θ,τ )g(θ,τ )
Cx (t,Ω) = ∫∫ M x (θ,τ )e
− j (θt +Ωτ )
dτdθ
(6)用广义时间相关表示
− jtθ ′ 定义: g ( t,τ ) = ∫ g (θ,τ ) e dθ
上一例已求出,中心在 (θ , τ ) = (0, 0) 处;
互项:
1 2 α 2 1 Ax1 ,x2 (θ,τ ) = exp − (θ −Ωd ) + (τ − td ) exp j ( Ωuτ +θ tu +Ωd tu 2π 4 4α
1 2 α 2 1 Ax1 ,x2 (θ,τ ) = exp − (θ −Ωd ) + (τ − td ) exp j ( Ωuτ +θ tu +Ωd tu ) 2π 4 4α
Wx ( t,Ω ) = ∫ rx (t , τ )e − jΩτ dτ
WVD定义为瞬时自相关对 时间延迟 的傅里叶正变换
τ
rx ( t,τ ) = ∫ Ax (θ ,τ ) e − jθ t dθ
Wx ( t,Ω ) = ∫ rx (t , τ )e − jΩτ dτ = ∫∫ Ax (θ ,τ ) e
现代信号处理教程_-_胡广书(清华)

- 352 -
a1 (n)
a 0 ( n)
H0 (z-1)
′ ( n) a1
↑2
H0(z)
↓2
ˆ 0 ( n) a
d 1 2
H1(z)
↓2
图 12.1.1 双正交滤波器组
a1 ( n ) = a0 ( n ) ∗ h0 ( 2n )
= ∑ a0 ( k )h0 ( k − 2n ) = a0 ( k ), h0 ( k − 2n )
- 355 -
(12.1.14a)
ˆ 1 ( z ) = z − ( 2 l +1) H 0 ( − z −1 ) H
假定 l = 0 ,它们对应的时域关系是
(12.1.14b)
ˆ (1 − n ) h1 ( n ) = ( −1) n +1 h 0
ˆ ( n ) = ( −1) n +1 h (1 − n ) h 1 0
重建的充要条件是:
* ˆ 0 (ω ) + H 1* (ω + π ) H ˆ 1 (ω ) = 0 H 0 (ω + π ) H
(12.1.6a) (12.1.6b)
及
ˆ 0 (ω ) + H 1 (ω ) H ˆ 1 (ω ) = 2 H 0 (ω ) H
* *
证明:仿照(7.1.5)式的导出,有
ˆ ∗ (ω + π ) H 1 (ω ) = e − j ( 2 l +1)ω H 0 ˆ (ω ) = e − j ( 2 l +1)ω H ∗ (ω + π ) H 1 0
或
(12.1.13a) (12.1.13b)
ˆ 0 ( − z −1 ) H 1 ( z ) = z − ( 2 l +1) H
现代信号处理教程 - 胡广书(清华)-推荐下载

81 为了看清图3.3.4中交叉项的行为,我们将该图作了旋转,因此,水平方向为频率,垂直方向为时间。
图3.3.3 例3.3.3的WVD 图3.3.4 例3.3.4的WVD例3.3.5 令 ()2142t x t e ααπ-⎛⎫= ⎪⎝⎭(3.3.5)可求出其WVD 为 ()22,2exp[]x W t t ααΩ=--Ω(3.3.6)这是一个二维的高斯函数,,且是恒正的,如图3.3.5所示。
()Ω,t W x 由该图可以看出,该高斯信号的WVD 的中心在处,峰值为2。
参数控()()0,0,=Ωt α制了WVD 在时间和频率方向上的扩展。
越大,在时域扩展越小,而在频域扩展越大,反α之亦然。
其WVD 的等高线为一椭圆。
当WVD 由峰值降到时,该椭圆的面积。
1-e π=A 它反映了时-频平面上的分辨率。
如果令 ,,则的谱图()2142t h t e ααπ-⎛⎫=⎪⎝⎭()2142t x t eββπ-⎛⎫= ⎪⎝⎭()t x ()⎥⎦⎤⎢⎣⎡Ω+-+-+=Ω2221exp 2,βαβααββααβt t STFT x82(3.3.7)图3.3.5 例3.3.5的WVD,(a )高斯信号,(b )高斯信号的WVD它也是时-频平面上的高斯函数。
当其峰值降到时,椭圆面积。
这一结果说明,1-e π2=A WVD 比STFT 有着更好的时-频分辨率。
如果令 ()()tj et t x t x 001Ω-=(3.3.8)式中是(3.3.5)式的高斯函数。
是的时移加调制,其WVD 是:()t x ()t x 1()t x (3.3.9)()12200,2exp[()()/]x W t t t ααΩ=---Ω-Ω它将(3.3.6)式的由移至处。
其WVD 图形请读者()Ω,t W x ()()0,0,=Ωt ()()00,,Ω=Ωt t 自己画出。
83例3.3.6令 ()2201422j tt j t z t ee e αβαπΩ-⎛⎫=⎪⎝⎭(3.3.10)它是由(3.3.5)式的与()t x ()202j t j t y t Aee βΩ=(3.3.11)相乘而得到的(在(3.3.9)式中,A=1)。
现代信号处理教程 - 胡广书(清华)

98第4章 Cohen 类时-频分布4.1 前言除了Wigner 分布和谱图以外,近几十年来人们还提出了很多其它具有双线性行式的时-频分布。
1966年,Cohen 给出了时-频分布的更一般表示形式[44]: ()()()()() ,:,⎰⎰⎰-Ω+-*-+=Ωθττθττπθτθd dud eg 2u x 2u x 21g t C u t j x (4.1.1)该式中共有五个变量,即t ,Ω,τ,θ和u ,它们的含义我们将在下一节解释。
式中()τθ,g 称为时-频分布的核函数,也可以理解为是加在原Wigner 分布上的窗函数。
给出不同的()τθ,g ,就可以得到不同类型的时-频分布。
通过后面的讨论可知,目前已提出的绝大部分具有双线性形式的时-频分布都可以看作是Cohen 类的成员。
通过对Cohen 类分布的讨论有助于我们更全面地理解时-频分布,深入地了解它们的性质,并提出改进诸如交叉项这些不足之处的方法。
在Cohen 类时-频分布的讨论及抑制交叉项的方法中,在雷达信号处理中广泛应用的模糊函数(Ambiguity Function, AF )起着重要的作用。
因此,本章首先给出模糊函数的定义及其与Wigner 分布的关系,然后讨论Cohen 类分布及其不同的成员。
在4.4节讨论为确保Cohen 类分布具有一系列好的性质而对()τθ,g 所提出的要求。
最后,在4.5节讨论核的设计问题。
文献[47]对非平稳信号的联合时-频分布给出了较为详细且是较为权威性的论述。
4.2 Wigner 分布与模糊函数令()t x 为一复信号,我们在第三章已定义()()()22τττ-+=*t x t x t r x , (4.2.1)为()t x 的瞬时自相关函数,并定义()τ,t r x 相对τ的傅立叶变换 ()()⎰Ω-=Ωτττd t r t W j x x ,, (4.2.2)为()t x 的WVD 。
除去特别说明,该式及以下各式中的积分均是从∞+∞-~。
现代信号处理教程 - 胡广书(清华)
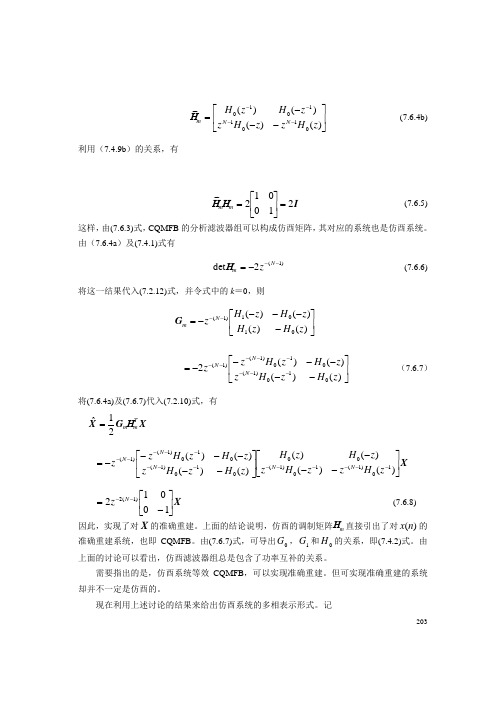
203⎥⎦⎤⎢⎣⎡---=----)()()()(~01011010z H z z H z z H z H N N m Η (7.6.4b)利用(7.4.9b )的关系,有I ΗΗ210012~=⎥⎦⎤⎢⎣⎡=m m(7.6.5)这样,由(7.6.3)式,CQMFB 的分析滤波器组可以构成仿酉矩阵,其对应的系统也是仿酉系统。
由(7.6.4a )及(7.4.1)式有)1(2det ---=N m z Η(7.6.6)将这一结果代入(7.2.12)式,并令式中的k =0,则⎥⎦⎤⎢⎣⎡-----=--)()()()(0101)1(z H z H z H z H zN m G⎥⎦⎤⎢⎣⎡------=--------)()()()(2010)1(010)1()1(z H z H zz H z H z zN N N (7.6.7) 将(7.6.4a)及(7.6.7)代入(7.2.10)式,有X ΗG X T m m 21ˆ=X ⎥⎦⎤⎢⎣⎡---⎥⎦⎤⎢⎣⎡------=--------------)()()()()()()()(10)1(10)1(00010)1(010)1()1(z H z z H z z H z H z H z H zz H z H z zN N N N N X ⎥⎦⎤⎢⎣⎡-=--10012)1(2N z(7.6.8) 因此,实现了对X 的准确重建。
上面的结论说明,仿酉的调制矩阵m Η直接引出了对)(n x 的准确重建系统,也即CQMFB 。
由(7.6.7)式,可导出0G ,1G 和0H 的关系,即(7.4.2)式。
由上面的讨论可以看出,仿酉滤波器组总是包含了功率互补的关系。
需要指出的是,仿酉系统等效CQMFB ,可以实现准确重建。
但可实现准确重建的系统却并不一定是仿酉的。
现在利用上述讨论的结果来给出仿酉系统的多相表示形式。
记204)()()(20112000z E z z E z H -+= (7.6.9a ) )()()(21112101z E z z E z H -+=(7.6.9b ) )()()(20120010z R z R z z G +=- (7.6.9c ) )()()(21121011z R z R z z G +=-(7.6.9d )式中)(ij ij R E 的下标i 代表0H ,1H 的序号,j 代表多相结构的序号。
《现代信号处理》课程教学大纲

(2) 熟悉线性时不变系统对随机信号的响应;(3) 了解估计子的性能评价标准,熟悉Cramer-Rao界;(4) 了解bayes估计和最大似然估计;(5)掌握线性均方估计和最小二乘估计。
2.重、难点提示(1) 重点是随机过程的时域、频域表示,线性均方估计和最小二乘估计;(2) 难点是随机过程相关函数与功率谱之间的关系,线性均方估计和最小二乘估计在滤波中的应用。
第2章功率谱估计(5学时)1.教学内容(1) 熟悉经典功率谱估计的方法及缺点;(2) 掌握现代功率谱估计的方法——参数模型法;(3) 掌握AR模型的Yule—Walker方程的导出;(4) 熟悉Levinson—Durbin算法;(5) 了解AR谱估计的性质和AR模型参数提取方法;(6) 掌握Capon谱估计方法。
2.重、难点提示(1) 重点是现代功率谱估计的方法——参数模型法、Levinson—Durbin算法、Capon谱估计;(2) 难点是AR模型的Yule—Walker方程推导、Capon谱估计算法推导。
第3章维纳滤波与卡尔曼滤波(6学时)1.教学内容(1) 了解维纳滤波的条件,掌握维纳霍夫方程;(2) 掌握FIR维纳滤波器的求解,了解因果IIR滤波器的求解;(3) 掌握均方误差的概念,均方误差性能曲面及其性质;(4) 掌握FIR维纳滤波器的设计;(5) 熟悉标量卡尔曼滤波器,了解矢量卡尔曼滤波器;(6) 了解维纳滤波器和卡尔曼滤波器的应用。
2.重、难点提示(1) 重点是维纳滤波的条件、维纳滤波器求解思路、FIR滤波器的求解;(2) 难点是维纳滤波标准方程的导入、FIR滤波器的求解思路。
第4章自适应滤波器(6学时)1.教学内容(1) 熟悉自适应滤波器的原理,掌握自适应线性组合器的实现;(2) 熟悉最陡下降法的基本思想;(3) 熟悉学习曲线和收敛速度的概念及与迭代次数的关系;(4) 掌握LMS算法,了解LMS算法的改进;(5) 掌握RLS算法,了解RLS算法的改进;(6) 了解自适应滤波器应用——谱线增强器和陷波器。
现代信号处理教程-胡广书(清华)

现代信号处理教程-胡广书(清华)jtt2g t, g,ed qt2q(4.4.2)式中g t,由(4.3.7)式定义。
由(4.3.8)和(4.3.9)及上式结果,有Cx t,21jxu2xu2qt u2qt u2dued,则上式变成令u2,u2Cx t,1j x x qt qt ed d21j jx qt ed x qt ed(4.4.3)221Xq2于是结论得证。
式中Xq是x t乘上窗函数q t后的傅立叶变换。
该式说明,如果g,是某一函数的模糊函数,那么用此g,所得到的Cx t,等效于谱图。
因此,谱图也是Cohen类成员。
2.P1,实值性,即Cxt,R,t,,Q1:g,g,证明:由(4.1.1)式,t,Cx12j t u xu2xu2g,ed du d 令,,则上式变为t,Cx12j t uxu2xu2g,ed dud显然,如要求t,Cx t,,必有g,g,Cx3、时移:P2:若s t x t t0,则Cs t,Cx t t0,Q2: g,不决定于t证明:因为g 4、频移:,处于,域,和t无关,所以它不影响分布的时移性质;若sP3:t x t ej t,则Cs t,Cx t,0Q3:g,与无关性质P2与P3称为Cohen类时-频分布的“移不变”性质,它包含了时移和频移。
5、时间边缘条件,即12Ct,d xtP4:x2Q4:g,0 1证明:将(4.1.1)式两边对积分,有Cx t,d12j t uxu2xu2g,edud d dx u2x u2g,e j t u dud d x u g,0e j t u dud2欲使上式的积分等于x t,必有欲使该式成立,必有j(t u)g(,0)ed2(t u)01,也就是说,为保证C t,具有WVD的边界性质,g,xg,在轴上始终为1。
6、频率边缘条件,即P5: Q5:Cx t,dt Xg0, 12其证明请读者自己完成。
112前已述及,为了有限的抑制AF中远离,0,0的互项,希望g,应为,平面上的2-D低通函数。
现代信号处理教程-胡广书清华

0 / 1第3章 短时傅立叶变换3.1连续信号的短时傅立叶变换由于在实际工作中所遇到的信号往往是时变的,即信号的频率在随时间变化,而传统的傅立叶变换,由于其基函数是复正弦,缺少时域定位的功能,因此傅立叶变换不适用于时变信号。
信号分析和处理的一个重要任务,一方面是要了解信号所包含的频谱信息,另一方面还希望知道不同频率所出现的时间。
早在1946年,Gabor 就提出了短时傅立叶变换(Short Time Fourier Transform ,STFT )的概念,用以测量声音信号的频率定位[64]。
给定一信号)()(2R L t x ∈,其STFT 定义为>-=<-==ΩΩΩ-Ω⎰⎰ττττττττττj j t x et g x d et g x d g x t STFT )(),()()()()(),(**,(3.1.1)式中τττΩΩ-=j t et g g )()(,(2.1.2) 及1||)(||=τg ,1||)(||,=Ωτt g并且窗函数)(τg 应取对称函数。
STFT 的含义可解释如下:在时域用窗函数)(τg 去截)(τx (注:将)(t x ,)(t g 的时间变量换成τ),对截下来的局部信号作傅立叶变换,即得在t 时刻得该段信号得傅立叶变换。
不断地移动t ,也即不断地移动窗函数)(τg 的中心位置,即可得到不同时刻的傅立叶变换。
这些傅立叶变换的集合,即是),(Ωt STFT x ,如图2.1.1所示。
显然,),(Ωt STFT x 是变量),(Ωt 的二维函数。
由于)(τg 是窗函数,因此它在时域应是有限支撑的,又由于τΩj e在频域是线谱,所以STFT 的基函数ττΩ-j et g )(在时域和频域都应是有限支撑的。
这样,(3.1.1)式内积的结果即可实现对)(t x 进行时-频定位的功能。
当然,我们自然要关心这一变换时域及频域的分辨率。
对(0 / 13.1.2)式两边作傅立叶变换,有 ⎰-ΩΩ-=ττυυττd e e t g G j j t )()(,⎰''='Ω--Ω--t d e t g et j tj )()()(υυ t j e G )()(Ω--Ω-=υυ (3.1.3)式中υ是和Ω等效的频率变量。
现代信号处理教程-胡广书(清华)
现代信号处理教程-胡广书(清华)jtt2g t, g,ed qt2q(4.4.2)式中g t,由(4.3.7)式定义。
由(4.3.8)和(4.3.9)及上式结果,有Cx t,21jxu2xu2qt u2qt u2dued,则上式变成令u2,u2Cx t,1j x x qt qt ed d21j jx qt ed x qt ed(4.4.3)221Xq2于是结论得证。
式中Xq是x t乘上窗函数q t后的傅立叶变换。
该式说明,如果g,是某一函数的模糊函数,那么用此g,所得到的Cx t,等效于谱图。
因此,谱图也是Cohen类成员。
2.P1,实值性,即Cxt,R,t,,Q1:g,g,证明:由(4.1.1)式,t,Cx12j t u xu2xu2g,ed du d 令,,则上式变为t,Cx12j t uxu2xu2g,ed dud显然,如要求t,Cx t,,必有g,g,Cx3、时移:P2:若s t x t t0,则Cs t,Cx t t0,Q2: g,不决定于t证明:因为g 4、频移:,处于,域,和t无关,所以它不影响分布的时移性质;若sP3:t x t ej t,则Cs t,Cx t,0Q3:g,与无关性质P2与P3称为Cohen类时-频分布的“移不变”性质,它包含了时移和频移。
5、时间边缘条件,即12Ct,d xtP4:x2Q4:g,0 1证明:将(4.1.1)式两边对积分,有Cx t,d12j t uxu2xu2g,edud d dx u2x u2g,e j t u dud d x u g,0e j t u dud2欲使上式的积分等于x t,必有欲使该式成立,必有j(t u)g(,0)ed2(t u)01,也就是说,为保证C t,具有WVD的边界性质,g,xg,在轴上始终为1。
6、频率边缘条件,即P5: Q5:Cx t,dt Xg0, 12其证明请读者自己完成。
112前已述及,为了有限的抑制AF中远离,0,0的互项,希望g,应为,平面上的2-D低通函数。
胡广书《现代信号处理教程》第二章

mn
[
x(t)
g* m,n
(t
)dt
]hm
,n
(t
)
mn
x(t)[
g
* m,n
(t)hm,n
(t
)]dt
mn
if x(t) t h e n
gm *,n(t)hm ,n(t)(tt)
Байду номын сангаасmn
m
n
gm *,n(t)hm ,n(t)(tt)
假定内积 结果就是
x(t),gm,n(t)
x(t)g*(tna)ej2mbtdtCm,n
目标:找到 g(t), h(t) 的关系:
x(t)
Cm,nhm,n(t)
mn
Cm,nx(t),gm,n(t)
x(t)
x(t), gm,n (t) hm,n (t)
右 边 2 1 x()g(t)ej() dd
x ( ) g ( t) ( ) d x ( ) g ( t)
l e t
t
x(t)2g 1(0) STFTx(t,)ejtd
STFT的一维反变换表示
STFT的二维反变换来表示 :
0.4 0.3 0.2 0.1
0 168 84 0
Frequency [Hz]
20
40
60
80
100 120
Time [s]
例4 令 g()(),则 STFT x(t, )x(t)ej t
可准确地实现时域定位,但无法实现频域定位。
Energy spectral density
Linear scale
现代信号处理教程-胡广书(清华)
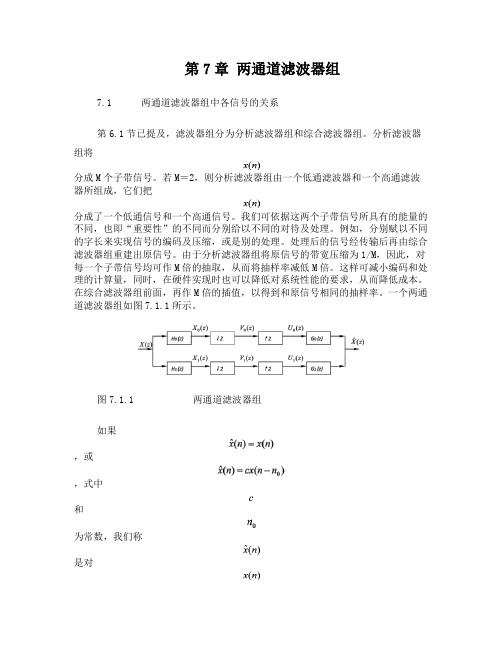
第7章两通道滤波器组7.1 两通道滤波器组中各信号的关系第6.1节已提及,滤波器组分为分析滤波器组和综合滤波器组。
分析滤波器组将分成M个子带信号。
若M=2,则分析滤波器组由一个低通滤波器和一个高通滤波器所组成,它们把分成了一个低通信号和一个高通信号。
我们可依据这两个子带信号所具有的能量的不同,也即“重要性”的不同而分别给以不同的对待及处理。
例如,分别赋以不同的字长来实现信号的编码及压缩,或是别的处理。
处理后的信号经传输后再由综合滤波器组重建出原信号。
由于分析滤波器组将原信号的带宽压缩为1/M,因此,对每一个子带信号均可作M倍的抽取,从而将抽样率减低M倍。
这样可减小编码和处理的计算量,同时,在硬件实现时也可以降低对系统性能的要求,从而降低成本。
在综合滤波器组前面,再作M倍的插值,以得到和原信号相同的抽样率。
一个两通道滤波器组如图7.1.1所示。
图7.1.1 两通道滤波器组如果,或,式中和为常数,我们称是对的“准确重建(Perfect Reconstruction,PR)”。
本节首先讨论图7.1.1中各信号间的关系,然后讨论实现准确重建的途径。
也即,如何确定,,和才能去除混叠失真,幅度失真及相位失真。
由图7.1.1及第五章关于抽取与插值的输入、输出关系,对图中的分析滤波器组,有:,( 7.1.1a )_(7.1.1b)即:(7.1.2)对综合滤波器组,有:而,所以(7.1.3)将(7.1.2)式代入(7.1.3)式,有:(7.1.4)该式给出了和及分析滤波器组,综合滤波器组之间的关系(i=0,1)。
将(7.1.4)式展开,有:令(7.1.5a)(7.1.5b)则(7.1.6)由于是移位后的结果,因此它是混叠分量。
显然,若令,则可有效的去除混叠失真,这样:(7.1.7)反应了去除混叠失真后的两通道滤波器组的总的传输特性。
系统的幅度失真及相位失真均与有关,因此又称“失真传递函数(distortion transfer function)”。
推荐信号与系统、信号处理书籍的个人看法

1、《Linear Systems and Signals》——thi这本书个人觉得很不错,是一本线性系统和信号的入门好书。
可以适用于通信、电路、控制等专业。
虽说是入门的好书,但是本书的编排是内容由浅入深,讲述可是深入浅出。
我通读全书后,觉得深有体会,看这本书就像在看小说一般,对于一个话题的介绍,往往从其历史发展说起,让你知道其来龙去脉。
不像国内的书,一上来就是定理、定律。
同时,书中每讲完一个知识点,都会有适当的例题让你加深理解。
本书给我的一种感觉就是,作者将一种菜吃透了,消化了,而且掌握了作者这种菜的方法,然后把这种做法告诉你,然你自己去做菜,做出来的菜可能不一样,但是方法你是掌握了。
最根本的你掌握了,做什么菜是你自己的发挥了。
不像国内的教科书,就要你做出一样的菜才是学会了做菜。
这本书讲述了线性系统的一般原理,信号的分析处理,例Fourier变换、Laplace 变换、z变换、Hilbert变换等等。
从连续信号说到离散信号,总之是一气呵成,中间似乎看不出什么突变。
对于初学者,这是一本很好的入门书,对于深入者,这又是一本极好的参考书。
极力推荐。
实话说,Lathi的书每看一回都会有新的感觉,常看常新。
2、《Fundamentals of Statistical Signal Processing,Volume I: Estimation Theory》——Steven M. Kay3、《Fundamentals of Statistical Signal Processing,Volume II: Detection Theory》——Steven M. Kay这两本书是Kay的成名作。
我只读过第一卷,因为图书馆只有第一卷:p这两本书比Van Trees的书成书要晚,所以内容比较新。
作者的作风很严谨,书中的推导极其严密。
不失为一位严谨的学者的作风!虽说推导严密,但是本书也不只是单纯讲数学的,与工程应用也很贴近。
第9章9.1-9.2(胡广书)

m=−∞
∑x(1− m)h(3m +1) = x(1)h(1) = u(4)
例 考查一个多抽 样率系统是如 何工作的
n: x ( n) : v1 (n) : u1 (n) : 0
x(n)
z −1
↓2 ↓2
v1 (n)
v2 (n)
↑2 ↑2
u 1(n)
z −1
u 2(n)
y (n)
1
2
3
4
5
6
7
x(0) x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(0) x(2) x(4) x(6) x(8) x(10) x(12) x(14) x(11) x(13) x(6) x(5) 0 x(5) 0 x(7) x(6) x(6) x(0) 0 x(2) 0 x(1) x(0) 0 0 x(4) 0 x(3) x(2) 0 0 0 x(4)
jω
M −1
如何理解
令: M = 3
1 jω jω /3 Y(e ) = X (e ) 3 1 + X (e j (ω−2π )/3 ) 3 1 j (ω−4π )/3 + X (e ) 3
将 X (e jω ) 作3倍 的扩展 将 X (e )移动 2π 后作3倍的扩展 将 X (e jω )移动 4π 后作3倍的扩展
x(n)
| ω |≤ π L 其它
↑L
v (n)
h (n)
y (n)
y(n) =υ(n) *h(n) = ∑υ(k)h(n − k)
= ∑x(k L)h(n − k)
y(n) =
k =−∞
k
∑x(k)h(n − kL)
∞
k
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
81为了看清图3.3.4中交叉项的行为,我们将该图作了旋转,因此,水平方向为频率,垂直方向为时间。
图3.3.3 例3.3.3的WVD 图3.3.4 例3.3.4的WVD例3.3.5 令()2142t x t e ααπ-⎛⎫= ⎪⎝⎭(3.3.5)可求出其WVD 为()22,2exp[]x W t t ααΩ=--Ω (3.3.6)这是一个二维的高斯函数,,且()Ω,t W x 是恒正的,如图3.3.5所示。
由该图可以看出,该高斯信号的WVD 的中心在()()0,0,=Ωt 处,峰值为2。
参数α控制了WVD 在时间和频率方向上的扩展。
α越大,在时域扩展越小,而在频域扩展越大,反之亦然。
其WVD 的等高线为一椭圆。
当WVD 由峰值降到1-e 时,该椭圆的面积π=A 。
它反映了时-频平面上的分辨率。
如果令 ()2142t h t e ααπ-⎛⎫=⎪⎝⎭,()2142t x t e ββπ-⎛⎫= ⎪⎝⎭,则()t x 的谱图 ()⎥⎦⎤⎢⎣⎡Ω+-+-+=Ω2221exp 2,βαβααββααβt t STFT x (3.3.7)82图3.3.5 例3.3.5的WVD,(a )高斯信号,(b )高斯信号的WVD它也是时-频平面上的高斯函数。
当其峰值降到1-e 时,椭圆面积π2=A 。
这一结果说明,WVD 比STFT 有着更好的时-频分辨率。
如果令 ()()tj et t x t x 001Ω-= (3.3.8)式中()t x 是(3.3.5)式的高斯函数。
()t x 1是()t x 的时移加调制,其WVD 是:()12200,2exp[()()/]x W t t t ααΩ=---Ω-Ω (3.3.9)它将(3.3.6)式的()Ω,t W x 由()()0,0,=Ωt 移至()()00,,Ω=Ωt t 处。
其WVD 图形请读者自己画出。
例3.3.6 令 ()2201422j t t j t z t ee e αβαπΩ-⎛⎫= ⎪⎝⎭(3.3.10) 它是由(3.3.5)式的()t x 与83()202j tj t y t Aee βΩ= (3.3.11)相乘而得到的(在(3.3.9)式中,A=1)。
我们已熟知()t y 为线性调频Chirp 信号,其WVD 是:()()20,2y W t A t πδβΩ=Ω-Ω- (3.3.12)其图形我们已在图1.1.2中给出。
(3.3.9)式()t z 的WVD 是()220,2exp[()/]z W t t t αβαΩ=--Ω-Ω- (3.3.13)它是恒正的。
显然,高斯信号、Chirp 信号都是(3.3.9)式()t z 的特例。
()Ω,t W z 如图3.3.6所示。
图3.3.6 例3.3.6的WVD ,(a )Chirp 信号,(b )Chirp 信号的WVD例3.3.7 令()x t 为一多普勒信号。
所谓多普勒信号指的是一个物体相对一个位置不变的“观察者(如雷达)”运动时,“观察者”所听到或所记录到的该物体运动的信号,如其运动84的速度或发出的声音。
众所周知,当该运动物体接近和远离“观察者”时,其信号当频率会发生变化。
图3.3.7 给出了该信号当时域波形、频谱及时-频分布。
由该图可看出信号的能量随时间和频率的分布。
图3.3.6 例3.3.6的WVD3.4 Wigner 分布的实现如同许许多多的其它信号处理的算法一样,我们最终的目的是要将它们应用于科研或工程的实际。
这时所遇到的问题同样是信号的离散化及数据的有限长问题。
在(3.1.2)式中,若令对信号()t x 的抽样间隔为s T ,即s nT t =,并令s kT =2τ,则s kT 2=τ,这样,(3.1.2)式对τ的积分变成对k 的求和,即 ()()()∑∞-∞=Ω-*-+=Ωk T k j sssssx sekT nT x kT nT x T t W 22, (3.4.1)若将s T 归一化为1,并考虑到相对离散信号的频率s T Ω=ω[19],则上式变为:()()()∑∞-∞=-*-+=k k j x ek n x k n x t W ωω22, (3.4.2)85我们知道,将()t x 变成()n x ,则()t x 的频谱()Ωj X 将变成周期的频谱()ωj e X ,周期为π2,且π2对应的抽样频率为s f 。
与此同样的是,()t x 的WVD ()Ω,t W x 也变成周期的()ω,n W x ,但是,由(3.4.2)式,()ω,n W x 的周期为π,即: ()()()()∑∞-∞=+-*-+=+k k j x ek n x k n x n W πωπω22, (3.4.3)众所周知,若()t x 的最高频率为max f ,那么,抽样频率至少应满足max 2f f s ≥。
这是由抽样定理所决定的。
如若按max 2f f s =对()t x 抽样,那么用抽样后的()n x 做WVD ,由于其周期变为π,因此在WVD 中必将产生严重的混迭。
解决这一问题的直接方案是提高抽样频率,要求s f 至少要满足max 4f f s ≥ (3.4.4) 但是,一旦信号()t x 由max 2f f s =抽样变成()n x 后,要想对()t x 重新抽样是困难的。
解决该问题的较为简便的方法有两个:1、采用解析信号,由解析信号的性质可知,将()t x 作Hilbert 变换得到()t x ˆ,按()()()t xj t x t z ˆ+=构成解析信号。
()t z 只包含()t x 的正频率部分。
这样,既可减轻由正、负频率分量所引起的交叉项干扰,又可在保持原有抽样频率max 2f f s =的情况下,避免了频域的混迭;2、对()n x 作插值,人为地将其抽样频率s f 提高。
具体办法是:若想将抽样频率s f 提高一倍,则可将()n x 每两点之间插入一个零,然后再让该信号通过一低通数字滤波器,从而将插入的这些零值变成原信号相应点的插值,有关插值的原理,详见本书第5章,此处不在讨论。
对(3.4..3)式,现余下两个问题要解决。
一是频率ω仍需离散化,二是式中对k 的求和需要取有限长。
式中k 是信号x 的时间序号,n 代表时移。
现令()()()k n x k n x k n r x -+=*, (3.4.5)86并假定()k x 的长度为N ,即1,,1,0-=N k ,现分析一下()k n r x ,的取值情况。
如图3.4.1(a )所示,()1,,1,0-=N k x ,将()k x 翻转得()k x -,现将()k x 、()k x -分别向左和向右移动n 个时刻,如取2=n ,6=N ,则如图3.4.1(b )和(c )所示。
(a )、()k x(b )、()k x +2(c )、()k x -2图3.4.1 ()k n r x ,的解释当6=N 时,读者不难写出:(){}(){}(){}(){}(){}(){}⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫===-===-===-===-======******************0 时, ,,时, ,,,,3时, ,,,,时, ,,时, 时,1524334251k x x k r n k x x x x x x k r n k x x x x x x x x x x k r n k x x x x x x x x x x k r n k x x x x x x k r n k x x k r n x x x x x x 55354453041322314002112000,551~1,442~2,32~2,221~1,110,00(3.4.6) 假定将()k n r x ,都扩充成N 点序列,即在其后补零,那么,(3.4.2)式可写成 ()()∑-=kkl Njx x ek n r l n W π4,2, (3.4.7)式中,()k n r x ,在任一n 时刻的长度都变成了N ,k 的实际取值情况由(3.4.4)决定。
这样,对(3.1.6)式稍作变化后即可用DFT 来实现。
上述过程即是离散WVD 的思路。
具体实现方k⋅⋅⋅⋅)(k x 012345k⋅⋅⋅⋅)2(k x +01232-1-k⋅⋅⋅⋅)2(k x -0121-2-3-87案见MA TLAB 中High -Order Spectral Analysis Toolbox 中的Wig2.m 文件。
注意:()l n W x ,在频域是周期的,周期为π(归一化频率为0.5)。
该方法有明显的缺点,即在不同的n 下,计算()k n r x ,时所利用的()k x 的点数有着明显的不同(见(3.4.6)式)。
此外,由于WVD 是二次函数的分布,有交叉项存在,因此,希望能对这种交叉项有所抑制。
针对这两个原因,人们自然提出了“加窗WVD ”,即“伪WVD (Pseudo WVD ,PWVD )”。
取窗函数()n w ,()n w 应是实对称的函数,假定其宽度为14-L ,即当L k 2≥时,()0=k w ,用()k w 乘()k n r x ,,由(3.4.5)式得:()()()() k n x k n x k w k n pr x -+=*, (3.4.8) 将其代入(3.4.2)式,有()()()()()()()()()()()()()()()()()()() n x n x e k n x k n x k w n x n x e k n x k n x k w e k n x k n x k w e k n x k n x k w k n PW L k k j L k k j L k kj L L k kj x *-=-**-=-*--=-*---=-*-⎭⎬⎫⎩⎨⎧-+=--++-+=-+=∑∑∑∑22Re 42222,12021202012212122ωωωω现将ω离散化,可将π2分成L 2等份,即l Ll 22πω=,则(3.4.9)式变为: ()()()()()() n x n x e k n x k n x k w l n PW L k L kl j x *-=⎪⎭⎫⎝⎛-*-⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-+=∑2Re 4,12024π (3.4.10) 式中12~0-=L l 。
注意, 由该式,有()() iL l n Pw l n PW x x +=,, (3.4.11) 即()l n PW x ,以L 为周期。
这样,若按(3.4.10)式计算L 2点FFT ,则求出的()l n PW x ,将有一半的冗余。
通常,我们假定:()() ,当L k k n x k n x >=-+*0 (3.4.12)这样,(3.4.10)式可变成88()()()()()() n x n x e k n x k n x k w l n PW L k kl L j x *-=⎪⎭⎫⎝⎛-*-⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-+=∑2Re 4,102π (3.4.13) 这是一个标准的L 点的FFT 。