日本演算工坊(ENZAN)自动导向系统概述
日本横河系统硬件构成介绍
浙江大学控制科学与工程学系 太原工业学院自动化系
一、CS1000系统构成及设备
—集散控制系统 计算机控制系统 — ——
1.1 CS1000系统构成及设备 域的概念:由一条控制总线连接的站的集合。 域的最小配置: 1个FCS、1个HIS。 域的最大配置: 一个域中可有以下设备HIS、FCS、BCV总共最多 24个站,其中HIS最多8个。
浙江大学控制科学与工程学系 太原工业学院自动化系
一、CS1000系统构成及设备
—集散控制系统 计算机控制系统 — ——
CS1000系统规格 监视工位号数:8000个工位号 最大站号:24个站 人机接口站:8台 现场控制站:16个 通信网络:185m同轴电缆,数据传输速率为10Mbps
浙江大学控制科学与工程学系 太原工业学院自动化系
浙江大学控制科学与工程学系 太原工业学院自动化系
—集散控制系统 计算机控制系统 — ——
补存 日本横河集散控制 系统介绍
浙江大学控制科学与工程学系 太原工业学院自动化系
基本术语介绍
—集散控制系统 计算机控制系统 — ——
HIS:人机接口站,也叫 操作站,就是我们所说 的“上位机”。 FCS:现场控制站,也叫控制站,就是我们说的 “下位机”。 VL-net:是一个虚拟的网,建立在普通的乙太 网上,用于控制站和操作站之间的通讯 I/O模件:输入/输出模件,在下微机中的卡件。 双重化 :或叫冗余,在cs1000系统中,所有的设备 都是双重化的,目的是防止在生产中某个设备出现 故障而影响生产,发生危险。
通过BCV(总线转换器)可将CS1000系统域接入 CS3000系统域,将μXL系统域接入CS3000系统域。
浙江大学控制科学与工程学系 太原工业学院自动化系
日本演算工坊自动排版软件在软土盾构施工中的应用
2018.07Doors &Windows日本演算工坊自动排版软件摘T(TBM Guidance System)control system )、)。
”,δ1δ2δ3δ4应用与实践206Doors&Windows 被确定以后”,3宁波市属典型的软土地区由于盾构机实际操作过程中环号102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120实际拼装点位1541241241272712412415412146演算工坊20环排版2415412161461461416513571214演算工坊每次排版取第1环211241241272712412414412146环号130131132133134135136137138139140141142143144145146147148实际拼装点位124124641241241241246116412演算工坊20环排版6146146146161116614161464614演算工坊每次排版取第1环1541242115115115112141411341512112212312412512612712812911314641271274124124271214161464121412714915015115222022122222322441241512412412314614151353141114151511512“;“),通过以上对软件的使用可以发现在每次取一环排版和实际施工选择不同的((下转第210页)应用与实践2072018.07Doors&Windows([1]宋瑞恒.盾构隧道通用管片排版与动态纠偏管理软件开发[D]. 32~34.基于悬挑支撑架的特点6悬挑支撑架作为传统落地式支撑架的改进型钢悬挑支撑架适用范围广经过本工程实际应用回填而造成施工停滞参考文献]JGJ作者简介(上接第207页)应用与实践2102018.07。
RMS-D自动导向系统(激光靶、两点法)

---上海力信
前言
伴随着我国城镇化进程的高速发展,地铁 隧道行业的新型崛起,隧道掘进机市场正在不 知不觉的蔓延。自动化导向系统是隧道机械化 施工的重要组成部分,竞争也随之日趋激烈。 作为国内导向系统领域的标杆,上海力信 始终追求更领先的技术、更过硬的品质、更优 质的服务。
目 录
软件介绍
RMS-D自动导向系统由上海力信测量技术有限公司 在2005年研发而成,发展至今已有两套成熟的方案。是中 国第一套成功商业化的自动导向系统。经过多年的发展, 上海力信已然成为世界三大导向系统之一。针对目前主流 盾构机制造技术,RMS-D自动导向系统 已经为日系、欧系 盾构设计开发出棱镜法和激光靶法两套方案。普遍的运用 于在国内、外大部分的盾构机厂家(铁建重工、中铁装备、 上海力行、天地重工、北方重工、华遂通、三一重工、海 瑞克、小松)。成功施工案列达到上百余条隧道,分布全 国各个省市。
自动导向系统的工作原理
在隧道始发前建立目 标单元(棱镜或激光靶)与 掘进机确定空间相对位置关 系。在利用全站仪测量目标 单元的坐标与角度换算出掘 进机实时掘进方向。通过与 隧道设计轴线的对比计算出 掘进机的实时姿态。
棱 镜
激 光 动导向系统的特点
高精度测量
全站仪主机精度有0.5″、1″、2″可选; 双轴数字倾斜仪精度达到0.005°,超出行业标准,提供更多精度保证; 软件算法采用7参数转换模式,精度更高,数据更有保证;
• 先进的理论技术 • 可靠的产品质量 • 快捷的售后服务
最先进的理论技术 国产自动导向系统的领路人 无线通讯模块 RMS-D自动导向软件 可靠的产品质量 快捷的售后服务
国产自动导向系统的领路人
作为国产自动导向系统的领路人,上海力信公 司有着深厚的历史底蕴,对隧道内自动导向和相关 联系测量也有着独到的见解。公司现有棱镜法和激 光靶法两种非常成熟的方案的自动导向系统,也是 国内目前最主流的两类自动导向系统。
“智慧盾构”重要一环!日本开发盾构洞内自动测量系统

㊀第2期武铁路:㊀基于深度学习的破碎带盾构施工沉降预测分析㊀463.ZHAO Yaoqiang,LI Yuanhai,ZHU Shiyou,et al.Study ofrules of influence of shield launching in different strata onground surface settlement[J].Tunnel Construction,2011,31(4):463.[10]㊀SAGASETA C.Analysis of undrained soil deformation dueto ground loss[J].Geotechnique,1987,37(3):301.[11]㊀LEE K M,ROWE R K.Deformations caused by surfaceloading and tunneling:The role of elastic anisotropy[J].Geotechnique,1989,39(1):125.[12]㊀韦凯,宫全美,周顺华.基于蚁群算法的地铁盾构隧道长期沉降预测[J].铁道学报,2008,30(4):79.WEI Kai,GONG Quanmei,ZHOU Shunhua.Forecast oflong-term settlement of metro tunnel based on ant colonyoptimization[J].Journal of the China Railway Society,2008,30(4):79.[13]㊀黄宏伟,张冬梅.盾构隧道施工引起的地表沉降及现场监控[J].岩石力学与工程学报,2001,20(增刊1):1814.HUANG Hongwei,ZHANG Dongmei.Shield tunnelinginduced surface settlement and in-situ monitoring[J].Chinese Journal of Rock Mechanics and Engineering,2001,20(S1):1814.[14]㊀朱才辉,李宁,柳厚祥,等.盾构施工工艺诱发地表沉降规律浅析[J].岩土力学,2011,32(1):158.ZHU Caihui,LI Ning,LIU Houxiang,et al.Analysis ofground settlement induced by workmanship of shield tunneling[J].Rock and Soil Mechanics,2011,32(1):158. [15]㊀谢自韬,江玉生,刘品.盾构隧道壁后注浆压力对地表沉降及围岩变形的数值模拟研究[J].隧道建设,2007,27(4):12.XIE Zitao,JIANG Yusheng,LIU Pin.Numericalsimulation study of surface settlement and surrounding rockdeformation caused by backfill grouting pressure in shieldtunneling[J].Tunnel Construction,2007,27(4):12.智慧盾构 重要一环!日本开发盾构洞内自动测量系统近日,日本大林组与从事测量业务的演算工房共同开发了一项用于盾构隧道洞内自动测量的系统 OGENTS/SURVEY ㊂该系统可通过移动终端远程操控自准直全站仪,实现自动化的测量作业㊂相比以往测量方式可减少30%的作业时间㊂开发背景盾构施工中,为了管理工程进度和施工精度需要每天进行洞内测量㊂目前对于盾构位置和姿态的测量(盾构测量)已实现了自动化,但对于管片的水平和竖直方向蛇形量的测量(管片测量)等依然采用手动方式㊂由于作业空间狭小,并且对测量仪器进行视准时测量员需弯腰操作,身体负担较重㊂此外,为了不影响盾构掘进进度,测量作业时间也受到限制㊂因此亟需一种自动化测量技术㊂系统概况OGENTS/SURVEY 系统是对盾构施工中必要的4个测量项目(洞内基准点测量㊁水准点测量㊁管片测量㊁盾构测量)全部通过移动终端远程操控自准直全站仪实施自动化测量,并且无需使用其他测量设备㊂该系统具有以下特征:1)通过移动终端远程操控进行自动测量㊂目前的盾构洞内测量工作普遍由负责视准作业的测量员及其辅助人员共计2人进行㊂采用该自动测量系统,管理人员在设置了测量所必须的标靶和全站仪后,可使用移动终端对全站仪进行远程操控,完成测量作业㊂因此无需测量员和辅助人员㊂2)适用于所有洞内测量,提升工作效率㊂该系统使用1台全站仪完成盾构测量㊁洞内基准点测量㊁水准点测量㊁管片测量的自动化㊂测量结果可发送至盾构掘进管理系统,省去了现场记录和输入至系统的工作,测量时间可缩短30%,并且防止了人为差错㊂3)自我诊断与校正,维持高测量精度㊂使用自准直全站仪时可能会受振动或冲击等影响造成精度下降,而迄今为止,盾构自动测量系统尚无检测精度下降的功能㊂该系统则是引入了可立即检测到精度下降的自诊断功能,并搭载了自动校正仪器的自校正功能,能够维持高测量精度㊂为了响应日本国土交通省的智能化建设i-Construction项目,大林组正在研发适用于各类盾构隧道施工现场的盾构自动化系统 大林智慧盾构 ㊂该系统包含了盾构施工中的 盾构自动测量 管片自动拼装 盾构设备自动化 自动壁后注浆 自动出渣 盾构无人驾驶 6个领域㊂计划在2020年前完成各要素技术的开发工作,在2021年前完成主系统㊂大林组计划在今后的盾构施工中利用新开发的自动测量系统提升施工进度,实现快速施工㊂(摘自隧道网https:///PNews/NewsDetail.aspx?newsId=32142㊀2019-02-15)302。
导向系统方案
导向系统方案1. 引言导向系统(Guidance system)是指一种通过传感器、计算机和执行器等组件,对目标进行实时检测与跟踪,并计算最佳路径或行动指导的系统。
导向系统广泛应用于自动驾驶、无人机导航、导弹制导等领域。
本文将介绍一种导向系统方案,包括其基本架构、工作原理和关键技术等内容。
2. 导向系统基本架构导向系统的基本架构主要包括传感器模块、计算模块、执行器模块和人机界面模块。
传感器模块用于实时检测目标的状态和环境信息,常用的传感器包括激光雷达、摄像头、GPS等。
激光雷达可以提供高精度的距离和角度测量,用于检测目标的位置和姿态信息;摄像头可以获取目标的图像信息,用于目标识别和追踪;GPS用于获取导航信息,包括位置、速度和方向等。
2.2 计算模块计算模块负责对传感器数据进行处理和分析,计算出最佳路径或行动指导。
计算模块一般由嵌入式处理器、算法库和相关软件组成。
嵌入式处理器负责进行数据处理和算法计算;算法库提供了常用的导航算法,如最短路径算法、避障算法等;相关软件用于系统控制和参数配置等。
执行器模块根据计算模块的指令,控制相关设备进行相应的动作。
执行器可以是电机、舵机、液压缸等,用于控制导向系统的运动或行动。
执行器模块还负责监测执行器的状态和输出,以确保系统正常运行。
2.4 人机界面模块人机界面模块用于与导向系统进行交互和控制。
人机界面可以是显示屏、触摸屏、按钮等,用于显示系统状态和操作指导,并接收操作人员的指令。
3. 导向系统工作原理导向系统的工作原理主要分为三个步骤:感知、计算和控制。
3.1 感知导向系统通过传感器模块对目标进行感知。
传感器模块采集目标的位置、姿态、速度等信息,并将这些信息传输给计算模块。
3.2 计算计算模块接收传感器模块传输的数据,对其进行处理和分析,并基于算法库进行计算。
计算模块通过最短路径算法、避障算法等,计算出最佳路径或行动指导,并生成相应的指令。
3.3 控制执行器模块接收计算模块生成的指令,控制相应的设备进行运动或行动。
2.5 自动导向系统

城市轨道交通分类概述1234单轨交通系统轻型轨道交通有轨电车交通56地下铁路交通7市域快轨交通8磁悬浮系统交通自动导向交通第二章城轨交通系统类型及技术经济特征9城轨系统运输组织特性5.自动导向系统(AGT)•自动导向系统(AGT)是一种通过非驱动的专用轨道引导列车运行的轨道交通方式。
•电动车辆在专用的轨道线路上运行,而且车轮均为橡胶轮胎,沿着特制的混凝土轨道运转,车站无人管理,由中央调度室的电子计算机集中控制。
•导向方式有中央凸型导向、中央内侧导向和两侧侧面导向三种。
线路分岔是以混凝土轨道侧面分岔道岔的沉浮方式实现的。
•自动导向交通系统车站分为终点站、中间站和管理站,站间距较短。
长度5-15km,坡度7%-10%,最小曲线半径可达10-30m。
法国VAL系统5.自动导向系统(AGT)⏹较早的AGT系统是日本1981年开通的两条线路:⏹一是神户新交通公司开通的三宫-中公园线路,全长6.4公里,后来开通三宫-机场线路;⏹二是大阪市住之江公园-中埠头间的6.6公里南港线路。
⏹目前这三条线路均采用无人驾驶的ATO系统,运营速度22~27km/h,最大速度达到60km/h;高峰期最小间隔达到了3分左右。
日本大阪南港线5.自动导向系统(AGT)•日本三宮車站:•三宮車站(三宮駅)是一位於日本兵庫縣神戶市中央區,由阪急電鐵、神戶高速鐵道、阪神電氣鐵道、神戶新交通與神戶市交通局五個單位所共用的鐵路車站建物組合,其中阪急與神戶高速所屬的站區位於加納町4丁目,阪神所屬的站區位於小野柄通8丁目,神戶新交通所屬站區位於雲井通8丁目,神戶市營地下鐵的站區則位於北長狹通1丁目。
除了上述各單位之外,三宮車站與JR西日本所屬的三之宮車站(三ノ宮駅)同樣都座落於神戶市正中央的三宮地區神户三宫车站神户机场神户自动导向系统中间站和终点站及导向轨道首都国际机场自动导向捷运系统首都国际机场自动导向捷运系统AGT系统主要技术特性指标:(1)最小运行时间间隔:2分;(2)每节车厢乘客人数:70人(按0.14m2/人计算);(3)每列车编组车厢节数:4-12;(4)每小时单向最大运送能力:8000-25000人;(5)时刻表速度:30km/h;(6)最低经济运输量:4300人/km 天.AGT系统的优点:1 客运能力为5000~15000人/h,高于公共汽车,而且建设成本与地铁、轻轨相比又低得多。
enzan测量导向系统工程应用探析
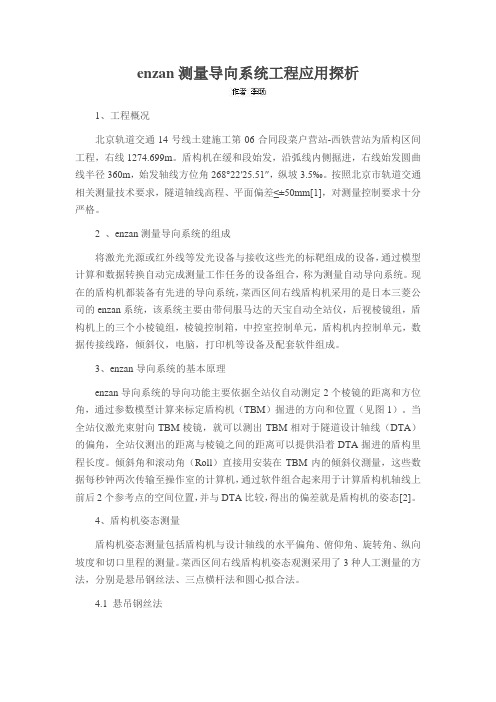
enzan测量导向系统工程应用探析1、工程概况北京轨道交通14号线土建施工第06合同段菜户营站-西铁营站为盾构区间工程,右线1274.699m。
盾构机在缓和段始发,沿弧线内侧掘进,右线始发圆曲线半径360m,始发轴线方位角268°22′25.51″,纵坡3.5‰。
按照北京市轨道交通相关测量技术要求,隧道轴线高程、平面偏差≤±50mm[1],对测量控制要求十分严格。
2 、enzan测量导向系统的组成将激光光源或红外线等发光设备与接收这些光的标靶组成的设备,通过模型计算和数据转换自动完成测量工作任务的设备组合,称为测量自动导向系统。
现在的盾构机都装备有先进的导向系统,菜西区间右线盾构机采用的是日本三菱公司的enzan系统,该系统主要由带伺服马达的天宝自动全站仪,后视棱镜组,盾构机上的三个小棱镜组,棱镜控制箱,中控室控制单元,盾构机内控制单元,数据传接线路,倾斜仪,电脑,打印机等设备及配套软件组成。
3、enzan导向系统的基本原理enzan导向系统的导向功能主要依据全站仪自动测定2个棱镜的距离和方位角,通过参数模型计算来标定盾构机(TBM)掘进的方向和位置(见图1)。
当全站仪激光束射向TBM棱镜,就可以测出TBM相对于隧道设计轴线(DTA)的偏角,全站仪测出的距离与棱镜之间的距离可以提供沿着DTA掘进的盾构里程长度。
倾斜角和滚动角(Roll)直接用安装在TBM内的倾斜仪測量,这些数据每秒钟两次传输至操作室的计算机,通过软件组合起来用于计算盾构机轴线上前后2个参考点的空间位置,并与DTA比较,得出的偏差就是盾构机的姿态[2]。
4、盾构机姿态测量盾构机姿态测量包括盾构机与设计轴线的水平偏角、俯仰角、旋转角、纵向坡度和切口里程的测量。
菜西区间右线盾构机姿态观测采用了3种人工测量的方法,分别是悬吊钢丝法、三点横杆法和圆心拟合法。
4.1 悬吊钢丝法在盾构机方便观测的一面作为控制面,盾壳上悬挂4根钢丝(见图2),选用直径0.3mm钢丝,挂10kg重锤,反射片选用Leica 30mm,油桶内注入适量阻尼液,确保重锤不碰桶壁,待钢丝稳定后方可进行观测,观测前要确保盾构铰接伸长量为零,观测采用边角法,测角应尽量采用1″全站仪,不少于4测回,测角中误差应在±2.5″内[1]。
ASIMO

诞生于1993~1997年的P1/2/3,可以说是成了真正意义上的机器“人”,因为,严格来说,在P1之前的E系 列,只能算是机械腿,到了P1才是真正地加入了上身,模拟人类全身运动的机器人。他可是个超大个儿,身高 1.9米,体重175千克。电源和控制计算机都是放在主体之外,可以实现开关门、抓东西搬运等动作。
机器人简介
本田的ASIMO机器人ASIMO身高1.3米,体重48公斤。它的行走速度是0-9km/h。早期的机器人如果直线行走 时突然转向,必须先停下来,看起来比较笨拙。而ASIMO就灵活得多,它可以实时预测下一个动作并提前改变重 心,因此可以行走自如,进行诸如“8”字形行走、下台阶、弯腰等各项“复杂”动作。此外,ASIMO还可以握手、 挥手,甚至可以随着音乐翩翩起舞。
ASIMO
仿人机器人
目录
机器人简介
03 功能
02 技术参数 04 进化史
05 身体结构
07 新技术
目录
06 动作原理
ASIMO(日本语:アシモ,罗马音:Ashimo,中文:阿西莫),日本本田技研工业株式会社研制的仿人机器 人。这款机器人模仿人类的动作更精准,以达到帮助人类,特别是行动不便者的设计目的。
ASIMO装载的大量传感器,既包括传统人类的传感器,也拥有一些超越人类的特殊感应器,能够迅速地了解 周围情况,在复杂的环境下也能快速顺畅地移动。
●视觉感应器:其眼部摄影机通过连续拍摄图片,再与数据库内容作比较,以轮廓的特征识别人类及辨别来 者身份;
●水平感应器:由红外线感应器和CCD摄像机构成的sensymg系统共同工作,可避开障碍物。
盾构(TBM)导向系统

盾构(TBM)导向系统
一、导向系统简介
1、作用
(1)盾构姿态:盾构(TBM)掘进过程中,导向系统连续测量盾构姿
•
五、导向系统使用注意事项
12、贯通前
洞内中线、高程——测量组 全站仪、后视棱镜托架——测量组 导向系统测量结果——测量组 洞门检查——测量组
隧道贯通前,精确调整盾构姿态,提高贯通精度——主司机
六、维护与故障处理
1、导向系统保护
导向系统各部件:激光靶(马达棱镜)、全站仪、棱镜、工业电脑、控 制箱、电台、天线、电池等,是精密的光学、机械、电子仪器,很容易 受到施工现场水、油、浆液、灰尘、震动和机械伤害,主司机和值班工 程师有责任提醒洞内相关人员对导向系统部件注意保护,并给导向系统 提供尽量大的测量窗口。
六、维护与故障处理
2、简单故障排除
一些影响因素可能会使导向系统不能正常工作,可简单排除: • 测量窗口阻挡; • 灰尘大; • • • • 管片旋转; 管片振动; 电缆故障; 电脑故障;
• 注意观察导向系统界面中的一些常用警示信号及其意义,向测量组了 解。
四、管片选型介绍
2、管片选型要素
盾构姿态偏差
B
中线
A 管片计算
C
推进油缸行程
铰接油缸行程
E
D
盾尾间隙
五、导向系统使用注意事项
1、主要职责
导向系统工作状态 测量组 值班工程师
盾构姿态数据 的正确性和精度
管片基础知识与管片选型

二、管片选型相关基础知识
管片超前量示意图 人工测量管片超前量
二、管片选型相关基础知识
任意点位楔形量的计算
本工程所采用的管片为带双面等腰楔形,楔形量为 40mm。管片各点位的楔形量通用计算公式:
(式1)
式(1)中:B——任意点位与最窄处(即K块中心 )之间的夹角如图所示。
当小角度时。式(1)可为简化δ =20×(1-
二、管片选型相关基础知识
二、管片选型相关基础知识
错缝拼装点位分布 所谓“拼装点位”,是指管片拼装时封顶块所在的位置。管片划分点位的依据有两 个:管片的分块形式和螺栓孔的布置。
常见的管片环缝连接螺栓有10根和16根,本区间采用16个根环缝连接螺栓,螺栓孔 的沿管片圆周均匀分布,对应的在圆周上一共有16个点位可以选择。
二、管片选型相关基础知识 2.2、管片选型的概念
管片选型是指通过灵活选用盾构管片,从而满足拟合设计线路行进的要求,同时保证 管片的成型质量,达到满足验收及使用的目的。
本区间采用通用楔形管片拼装,每一环除了因埋深不同而配筋不同的区别以外,楔形 量的布置的都是完全相同的,只要通过K块位置的选择从而旋转管片调整管片在各个方向 上的超前量进行符合设计线路的行进,有别于标准环、转弯环设置的管片需要进行不同类 型的管片组合使用。因此此类管片选型的核心就在于选择K块拼装的点位。
二、管片选型相关基础知识 2.3、通缝与错缝的区别
按照相邻两环管片拼装缝的位置不同,管片的拼装可以分成两种形式,通缝拼装 和错缝拼装,通缝即每一坏与上一环相对的位置是完全重合的,错缝即上一环与下一 环之间的纵缝不能重合,错缝拼装比通缝拼装在工程应用上出现的晚,但由于它在承 受纵向力和保持成圆度方面比通缝拼装优越,所以在很多工程中被大量应用。本区间 管片亦是采用错缝拼装。
盾构(TBM)导向系统简介

一、导向系统简介
1、作用
(1)盾构姿态:盾构(TBM)掘进过程中,导向系统连续 测量盾构姿态数据,并显示在主控室电脑屏幕上;主司机按 照姿态数据调整盾构掘进参数,保证盾构按照隧道设计轴线 (DTA)精确掘进;
(2)纠偏曲线:操纵TBM从目前的偏差位置 沿纠偏曲线平滑地调整到DTA 上;
• VMT、ZED导向系统中,盾构的平面趋势 是在盾构中部位置,盾构轴线与DTA的夹 角。
• PPS显示的是盾构轴线与刀盘处切线的夹 角。
• 两者差值与曲线半径和盾构长度相关。
二、使用
5、断链
断链前后编辑相互重叠一段 距离的两个DTA文件,在重叠 段切换。
三、误差与错误
1、测量误差
影响因素——盾构结构形式、导向系统类型、激光靶或马达棱镜到 刀盘的距离、马达棱镜间距、盾构震动、管片位移、 管片旋转、全站仪精度和状态、测量环境(烟 尘、温差)、全站仪~激光靶距离等;
(3)管片选型:
一、导向系统简介
2、盾构姿态
一、导向系统简介
2、盾构姿态
一、导向系统简介
3、分类
(1)陀螺仪
日本GYRO
(2)三棱镜
上海力信
(3)两(三)棱镜
德国PPS
日本演算工房
上海米度 上海力信……
(4)激光靶
英国ZED
德国VMT 德国TACS
上海米度 上海力信
中铁装备 铁建重工
……
一、导向系统简介
二、使用
2、偏差超限
二、使用
3、姿态预调整
管片上浮——盾构姿态适当调低; 盾构或管片下沉——调高; 小半径曲线段——偏向曲线内侧; 盾构始发——割线始发、抬高姿态和趋势; 贯通前——对准贯通面前方的接收洞门。
自动导向交通_发展中的新型轨道交通
、
,
列 车运 行 在 欧 美 国 家 自动 导 向交 通 的 列 车
。
,
行速 度 较 低 家称 为
的 概念 和 技术 在 日 本 等 国
。
编 组通常为
。 。人
辆 单 向 小 时运输 能 力 为 在 日本 由于 自动 导 向 交 通
,
,
,
年 美 国 达 拉 斯 的 沃 斯 堡 机场 建 成
,
的 列 车 编 组 辆 数 较 多 因 而 运 输 能 力 也 就相
间隔时 间 为 人员
人
。
年 澳 大利 亚 的 阿 德莱 德 建 成 了 世
界 上 第 一 条 商 业 运 营 的轨 行 公 共 汽 车 线 路
, ,
。
秒 全 线配 备车 辆
,
、
、
。
辆 运营
,
。
该 线路 为双 线 地 面 线 路 路 权 专 用 全 长 约
车 辆 的最 高 运 行 速 度可 达
、
。 。
或 自动 控 制 导 向 运 行 它 们 以 地 铁 和 轻 轨 为
自动 导 向 交 通 的车 辆 通常 采 用 轻 小型 和 橡 胶轮胎 外 观类 似公共汽 车 车辆定 员 在
人 间 车 辆采 用 电 力 驱 动 和 导 向 运 行
。
代表 新型 轨 道 交 通 的 基本 特 征 是 胶 轮 车 辆 沿 导 向 轨 自动控 制 导 向 运 行 它 们 以 自动 导 向交 通 为代 表
又先后 出 现 了市 郊铁 路 地 下铁道 高 架 铁
、
分 为 下 列 四 种 类型 即 新 型 轨道 交 通 系统 新
型 无 轨 交 通 系 统 连 续运 输 系 统 和 复 合 交 通 系 统 其 中复 合交 通 系 统 是 一 种 有 轨 和 无 轨
堀厂CEMS系统说明

堀厂CEMS说明一.CEMS介绍Horiba是日本的品牌,型号是ENDA-600ZG,该系统采用的是冷干抽取法,SO2,NO的测量采用的是非分散红外(NDIR)的原理,氧气测量采用的是顺磁法(俗称磁风)顺磁法的具体原理就是:顺磁氧传感器利用了氧气具有顺磁性,在传感器气室内的两个磁极之间,安装了两个充满氮气的玻璃球(俗称“哑铃”),它们固定在一个可以转动的同轴支架上。
被测气体中的氧气会被吸入磁场,产生对球体的作用力,从而对转轴产生一个力矩,这个力矩大小和氧气的含量具有线性关系。
该系统采用的分析仪是,如下图:二.ENDA-600ZG系统内部详解此系统和3080A有很多相似之处,气路比较复杂,具体示例如下图:三.ENDA-600ZG系统机柜内部气路图由于有两个泵,该系统和岛津3080A差不多,也是有两个独立的气路样品气气路图解:基准气气路图解四.分析仪的零点满点校准校准前我们需要将系统切换至维护模式,如下:点击分析仪面板上的MENU,如图1(图1)打开MENU,在弹出的的窗口中选择MAINTENANCE MODE,如图2(图2)打开MAINTENANCE MODE项,在弹出的窗口中选择ON,并按SET键退出,如图3(图3)维护模式切好后,我们就可以校准了,不过一定要切记,校准完成后,一定要将维护模式关闭。
1.分析仪的零点校准切好维护后,按一下分析仪面板上的CAL键,进入校准设置界面,选择NOX零点校准,如图4(图4)NO零点是通过空气来校的,待NOX数值基本保持不变时,按下CAL即可,如图5:(图5)2.分析仪的满点校准在此我们以SO2为例,其他因子与其的校准方法基本一致。
如果现场SO2标气需要更换时,我们需要在校正条件里面重新设置一下SO2跨度,主要目的就是检查校正条件里面的SO2浓度和标气的跨度值是否一致,具体步骤如下:点击分析仪面板上的MENU,如下:打开MENU后,弹出OPERATION窗口,然后按向右箭头,如下:按住向右箭头,待出现SETTING界面,然后选择CALIBRATION SET项,如下:打开CALIBRATION SET项,在此界面中输入SO2标准气的浓度,如下:跨度值设定好后,我们就可以做SO2满点校准了将SO2标准气连接到系统的标定气管上,如下:然后点击分析仪面板上的CAL键,在弹出的的界面上,选择SO2 SPAN GAS,并按SET退出,如下:此时打开SO2标气减压阀,将分析仪面板上的流量计流量调整到0.7L/min即可,然后待SO2数值基本保持不变时,按下CAL即可,SO2满点校准完成,如下:。
演算工房自动测量系统
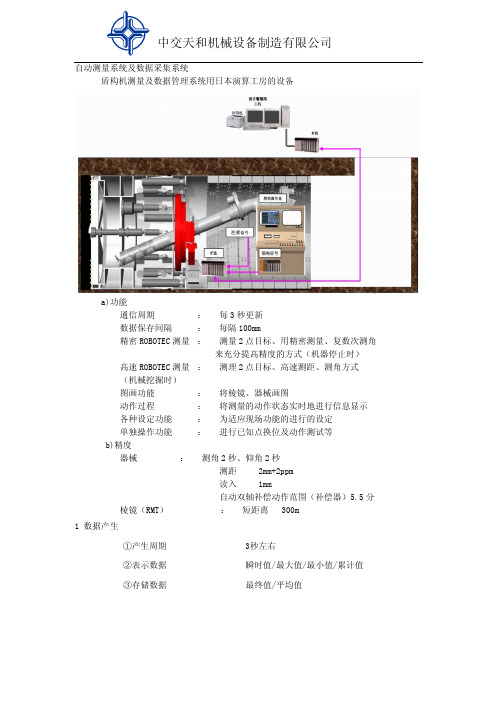
自动测量系统及数据采集系统盾构机测量及数据管理系统用日本演算工房的设备a)功能通信周期 : 每3秒更新数据保存间隔 : 每隔100mm精密ROBOTEC测量 : 测量2点目标、用精密测量、复数次测角来充分提高精度的方式(机器停止时) 高速ROBOTEC测量 : 测理2点目标、高速测距、测角方式(机械挖掘时)图画功能 : 将棱镜、器械画图动作过程 : 将测量的动作状态实时地进行信息显示各种设定功能 : 为适应现场功能的进行的设定单独操作功能 : 进行已知点换位及动作测试等b)精度器械 : 测角2秒、仰角2秒测距 2mm+2ppm读入 1mm自动双轴补偿动作范围(补偿器)5.5分 棱镜(RMT) : 短距离 300m1 数据产生①产生周期 3秒左右②表示数据 瞬时值/最大值/最小值/累计值③存储数据 最终值/平均值2 数据记录及保存①时间系列数据 每5秒(数据表示)②环片的详细数据 20mm(数据表示)③环片的代表数据 挖掘结束时(存储数据)3 系统的工作状态①掘进时 掘进机正在进行挖掘时的状态②准备时 已经开始挖掘并已经过环状片号码更新,而后又中断挖掘时的状态③组装时 正在装配铺装板、或装配结束正在准备下次挖掘时的状态4 环片掘进的开始和结束①辅助机 可以自动判断环形挖掘的开始和结束5 监视收集数据①主机(中央监视室等等) 可操作全部画面②辅机(远距离监视) 可表示计测监视画面③切削面(操作室) 通过操作监视器可表示操作盘上不能表示的数据6 已收集数据的管理 土压/注浆/加泥/排土量的各数据均备有通过统计方法做成的管理画面7 保存数据的表示 可以用数值或图表来表示已存储的数据8 报表制作 可印刷日报表/环片报表※ 注1)标准格式印刷(参照报告样品集) ※ 注2)标准格式以外的印刷格式属于可选择部分9 数据的有效利用 数据可在Microsoft Excel上使用※ 注1)Microsoft Excel为附带软件盾构机测量及掘进数据显示画面二 测量设备(ROBOTEC)1 目的:本系统是为了在隧道工程施工中降低测量作业劳动强度、提高施工质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
日本演算工坊(ENZAN)自动导向系统浅析
崔广宇
(中铁九局集团有限公司沈阳地铁项目部,沈阳110013 )
摘要:结合沈阳地铁一号线第五标段两个盾构区间、沈阳地铁二号线第十六标一个区间隧道掘进的测量实践,对日本演算工坊(ENZAN)自动导向系统进行了研究,阐述了自动导向系统姿态定位测量的原理和方法,以及自动导向系统调试方法和换站步骤。
关键词:地铁;盾构;自动导向系统
1前言
随着科学技术的发展,激光导向技术已经广泛应用于隧道掘进施工中。
其原理就是利用具有良好直线性光束的激光投射到盾构里,通过数据计算使盾构操作人员及时了解盾构的偏离、偏转情况,并随时纠正掘进方向,保证隧道施工的质量,提高隧道施工进度。
本文主要以沈阳地铁一号线重工街~启工街区间、启工街~保工街区间、沈阳地铁二号线下深沟~上深沟区间隧道掘进的测量项目为背景,阐述了演算工坊(ENZAN)自动导向系统定位测量的功能、原理、调试方法及换站步骤。
2自动导向系统的主要作用
盾构在掘进中由于地层阻力、刀盘掘削反力及推力千斤顶作用力不均等原因,使盾构偏离设计轴线。
自动导向系统主要有以下作用:
(1)可以通过隧道设计的几何元素计算出隧道的理论轴线。
(2)通过测倾仪器测量盾构的俯仰角和滚动角并予以显示。
(3)在显示器上实时以图形直观显示盾构轴线相对于隧道设计轴线的偏差,便于盾构操作人员根据偏差随时调整盾构掘进的姿态,使盾构轴线逼近隧道设计轴线。
(4)通过调制解调器和电话线与地面监控室电脑建立网络联系,将盾构掘进数据传输到监控室,便于工程管理人员实时监控盾构的掘进情况,查阅各环的掘进资料、测量资料及其他资料。
3演算工坊(ENZAN)自动导向系统的基本原理
演算工坊(ENZAN)自动导向系统通过全站仪测量设置在盾构中盾上方固定位置上的三个目标棱镜的绝对坐标(一般设置三个,其中一个备用),根据预先测定棱镜与盾构机切口和盾尾的相对位置关系以及盾构的俯仰角、滚动角推算出切口和盾尾的绝对坐标。
然后将切口和盾尾的绝对坐标与设计轴线相比较得出盾构的偏离情况,即平面偏差和高程偏差。
根据系统显示的轴线偏差和偏差趋势,以隧道设计轴线为目标,把偏差控制在设计要求范围内,从而达到通过控制盾构姿态来指导隧道掘进的目的。
盾构导向系统原理示意图
4演算工坊(ENZAN)自动导向系统的组成及其功能
日本演算工坊(ENZAN)的ROBOTEC自动测量系统主要由以下4个部分组成:
(1)具有自动照准目标功能的全自动马达全站仪,主要用于测量角度(水平角、垂直角)、距离和发射激光。
(2)高精度圆棱镜,主要用于接收、反射激光信号。
(3)计算机和隧道掘进软件,演算工坊(ENZAN)软件是自动测量系统的核心,它从全站仪等通信设备接收数据,并通过软件计算,把数据以数字和图形的形式显示在计算机上。
(4)通信电源箱,供给全站仪电源,保证全站仪和计算机之间的数据传输和通信。
5演算工坊(ENZAN)自动导向系统调试方法
在盾构组装始发前都要对导向系统进行调试。
始发前根据导线网测人工测量出切口中心、盾尾中心、全站仪站点、后视点绝对坐标以及盾构机俯仰角、滚动角。
将全站仪、后视点的三维坐标输入到计算机,机械校正盾构机俯仰角(头高为正)、滚动角(顺时为正)。
通过全站仪自动测量盾构机三个目标棱镜的绝对坐标。
进入TargetCalc.exe程序,输入全站自动测量的三个目标棱镜、人工测量的切口中心、盾尾中心绝对坐标以及俯仰角、滚动角。
程序会生成三个棱镜以切口中心为坐标原点建立的相对坐标系的坐标。
如下图:
其中平移长度请输入0即可,都输入完成后单击计算(俯仰角和旋转角须确认和盾构上的已经调适到一样)。
则棱镜几何坐标会出现计算结果,接着将结果输到下面的测量系统的棱镜设定画面中,进行目标间确认,保证三个目标棱镜的相对误差小于10mm。
根据设计图纸在CAD上画出隧道中线,在线形上每0.6m记录一个点,将数据导入Excel表格,进入senkei-ENG.exe程序(如下图),通过Excel表格生成一个线形文件,将线形文件拷贝到测量文件目录下,修改配置文件中线形显示的范围。
调试完成后在计算机上进行测量操作,即可显示盾构轴线相对隧道理论轴线的位置关系。
当隧道掘进完成后需要将存储的数据备份起来,以便以后查询使用。
6演算工坊(ENZAN)自动导向系统换站步骤
地铁隧道自动测量是一条支导线,它指示着盾构的推进方向,随着盾构机的推进延伸,全站仪也要向前换站,保证全站仪和目标棱镜的通视。
首先要记录换站前盾构的姿态坐标,在一号台车附近选定一环管片安装放置新站点的吊蓝,在吊篮上放置换站棱镜,新站点必须保持与全站仪通视。
通过自动导向系统的换站系统测定换站棱镜的坐标,然后将全站仪迁移至新吊篮上,后视点棱镜迁移至原站点吊篮上。
恢复全站仪通信电源,继续掘进,反复换站操作直至整条隧道贯通。
7结论
在沈阳地铁一号线重工街~启工街区间、启工街~保工街区间和沈阳地铁二号线下深沟~上深沟区间的实际应用中,自动导向系统共进行了三次始发调试,始发姿态精度均满足施工要求。
在盾构掘进施工过程中,自动导向系统实时监控,信息准确,动态连续,数据传输快速稳定,避免了人工测量的人为错误,减少了隧道测量人员的作业强度。
在贯通测量中,由于采用了先进的自动导向系统指导推进配合人工辅助测量,保证隧道准确贯通,满足贯通误差的精度要求。
参考文献:
[1] 陈馈、洪开荣、吴学松.《盾构施工技术》.人民交通出版社,2009
[2]周文波.《盾构法隧道施工技术及应用》.中国建筑工业出版社,2004
[3]《地下铁道工程施工及验收规范》(GB50299-1999).中国计划出版社,2003。