三次元培训教材
三次元培训

椭圆 圆柱 连接 要素 坐标 系统 探针
PN AN TO LP
投影 面
DI
计算 距离 记忆 呼出 点的 距离 程序 输入 复制 元素
IN ED DE PP
相交 程序 结束 图像 放大 补偿 点 时间 显示
角度 MR 公差 计算 探针 数据 坐标 转换
SD LM
CR 圆
CO
圆锥
DP SY
CM CP
KI
TI RS
SP 球
分中
转换 RM 测头
调出 程序
清除 荧屏
六、三次元基准建立及简单测量
1பைடு நூலகம்探针直径校正
①输入DP 2 ②对标准球测量五点(顶点一点、截面大圆测量四点) ③屏幕显示探针直径(标准探针直径相差太大则需要重新校准
2.坐标建立
①将工件擦拭干净于花岗岩平台上固定 ②选一个面为坐标基准面(投影面)
三、三次元的基础知识(开、关机)
1开启程序 ①接通气源将气压调至适当压力(3~4kg f/cm平方) ②按下POWER开关,接通三座标电源 ③打开电脑电源开关及屏幕显示开关 ④输入GEOPAK调出测量软件 ⑤进入测量系统 ⑥调出探针数据或重新校正 ⑦进行测量
三、三次元的基础知识(开、关机)
2.退出程序 ①退出GEOPAK测量软件 ②输入RS清除荧屏 ③输入EX退出软件 ④可关机
六、三次元基准建立及简单测量
6.坐标系 CS CS3 轴设置 CS4 轴补偿设置 CS5 面补偿设置 CS6 旋转坐标系 CS7 提取坐标系 CS8 保存坐标系 CS9 退出
谢 谢!
三次元培训
课程结构
一、三次元的定义、优点 二、三次元的保养 三、三次元的基础知识(开、关机) 四、三次元操作注意事项 五、三次元指令代号表 六、三次元基准建立及简单测量
蔡司全自动三次元培训教材

测量策略
不同的元素有不同的测量策略 常用的策略: 定义安全参数
1. 定义安全平面 2. 定义回退距离 3. 定义探针
定义测量方式
(打点还是扫描)
定义点列表
坐标系
一、基本坐标系
笛卡尔坐标
圆柱坐柱
球坐标
坐标系
二、附加坐标系
资源→其它→坐标系
附加坐标系和基本 坐标系可以是相互独 立的坐标系,也可以 只在原有的基本坐标 系之上修改需要的相 关参数。
RDS VAST/XXT
探针系统
三、手动装卸探针
✓探针组装
✓探针安装
✓探针卸载
✓探针定义
1. 探针组定义、添加、删除 2. 测针定义
旋转探头 增加测针
创建探针组 增加测针
旋转探头
探针系统
四、自动更换探针
✓ 增加库位盒 ✓ 定义主探针长度 ✓ 定义库位盒位置 ✓ 定义库位盒探针 ✓ 定义接近参数 ✓ 自动取放探针
坐标系
三、元素坐标系
每个元素都有其自身坐标系,不同的元素其坐 标系不一样。
四、机器坐标系
系统在默认状态下会有自己的坐标系,其原点 在左上角。
坐标系
五、坐标变换
当图纸上的基准不 在同一线上或同一面 上时,需要通过坐标 变换来补正坐标
1. 坐标平移 2. 坐标按角度旋转 3. 坐标按距离旋转
特性输出
元素采集
二、构造元素
➢无法通过直接测量识别,需要用已测量的元素构造而成。
➢ 常见的构造元素
• 3D直线 • 相交 • 对称 • 最大最小结果
备注:常用的椭圆,圆槽,方槽,圆环最好不要自动识别, 当然有时也不能,测量时需要注意探测策略。
蔡司全自动三次元培训教材

笛卡尔坐标 圆柱坐柱 球坐标
坐 标 系
二、附加坐标系
资源→其它→坐标系 附加坐标系和基本 坐标系可以是相互独 立的坐标系,也可以 只在原有的基本坐标 系之上修改需要的相 关参数。
坐 标 系
三、元素坐标系
每个元素都有其自身坐标系,不同的元素其坐 标系不一样。
四、机器坐标系
系统在默认状态下会有自己的坐标系,其原点 在左上角。
曲 线 知 识
三、策略和评定
策略主要用于选择 曲线的获取方式
评定主要用于曲线 获取后的计算方法
曲线策略
曲线评定
曲 线 知 识
四、曲线输出
轮廓度 Sat曲线实体 曲线实体 ASCII文件 文件
硬 件 知 识
一、硬件
机器型号: 机器型号: CONTURA G2 机器坐标系及零点 量程: 量程:700*1000*600 最大载重量: 最大载重量:720公斤 公斤 精度: 精度:0.0018mm
元 素 采 集
定义:元素具有规则的几何形状, 定义:元素具有规则的几何形状,以不同的 方式定义,可以用测量机测量. 方式定义,可以用测量机测量. 通常我们这台机器有以下三种采集的方法
自动识别元素 构造元素 从模型上采集元素
元 素 采 集
一、自动识别元素
1 2
可以通过探针 打点自动获得的 元素。 元素。 注意每个元素 的合理打点数。 的合理打点数。
8 9
3 4
10
5 6 7
常用的测量元素 有如右图1~10 有如右图
元 素 采 集
二、构造元素
无法通过直接测量识别,需要用已测量的元素构造而成。 无法通过直接测量识别,需要用已测量的元素构造而成。
常见的构造元素
蔡司全自动三次元培训教材 共36页PPT资料

一、基本尺寸输出
基本输出
角度输出
距离输出
特性输出
二、形位公差输出
形状输出
位置输出
CNC 编 程
一、编程步骤
1. 建立工件坐标系 2. 建立安全平面 3. 采集测量元素 4. 元素策略及评定设置 5. 输出测量特性 6. 安全五项检查
a) 安全平面 b) 安全距离 c) 回退距离 d) 探针组的设定 e) 探针的设定
四、简单维护
每日酒精清理导轨 导轨上不能摆放物品 不要挤压导轨
Thanks!!!
Thank you
自动探针更换
备注:库位的定义添加需要 用主探针进行
探针系统
五、手动校动探针
主探针校准 工作探针校准 探针被动校准 探针几何再校准
备注:
校准判断 主探针 s<=0.0005mm 工作探针 s<=0.001mm
手动校准探针
探针系统
六、自动校准探针
新建程序 建立机器坐标系 增加“探针校准”特性 选择校准的探针 定义“缺省输出报告”
元素采集
二、构造元素
无法通过直接测量识别,需要用已测量的元素构造而成。
常见的构造元素
• 3D直线 • 相交 • 对称 • 最大最小结果
备注:常用的椭圆,圆槽,方槽,圆环最好不要自动识别, 当然有时也不能,测量时需要注意探测策略。
元素采集
从模型上采集元素 常用的:
1. 定义点 2. 在圆柱上定义圆
输出报告设置
1.报告格式修改
2.报告表头修改 3.报告保存路径修改
用户输出格式
紧凑报告格式
缺省报告格式
探针系统
探针校准目的 探头介绍 手动装卸探针 自动装卸探针 手动校准探针 自动校准探针
蔡司全自动三次元培训教材 (1)ppt课件
2、软件基本操作
(1)、软件启动 启动软件后,出现如下对话框图示1,直接确定,等待系统出现
归零对话框图示2,点击确定。
图示1
图示2
基本操作
(2)、进入软件界面如下:
(3)、软件基本操作
基本操作
I. 创建新的测量程序 II. 打开已有的测量程序 III. 保存测量程序 IV. 关闭测程序
备注:几乎所有元素可以通 过这两种方式解决。
测量策略
不同的元素有不同的测量策略 常用的策略: 定义安全参数
1. 定义安全平面 2. 定义回退距离 3. 定义探针
定义测量方式
(打点还是扫描)
定义点列表
坐标系
一、基本坐标系
笛卡尔坐标
圆柱坐柱
球坐标
坐标系
二、附加坐标系
资源→其它→坐标系
附加坐标系和基本 坐标系可以是相互独 立的坐标系,也可以 只在原有的基本坐标 系之上修改需要的相 关参数。
输出报告设置
1.报告格式修改
2.报告表头修改 3.报告保存路径修改
用户输出格式
紧凑报告格式
缺省报告格式
探针系统
➢探针校准目的 ➢探头介绍 ➢手动装卸探针 ➢自动装卸探针 ➢手动校准探针 ➢自动校准探针
探针系统
一、目的
✓获取红宝石的直径 ✓探针间的相互位置关系
二、探头介绍
✓探头类型 ✓探头允许最大承重50g ✓探头允许最大接长125mm
RDS VAST/XXT
探针系统
三、手动装卸探针
✓探针组装
✓探针安装
✓探针卸载
✓探针定义
1. 探针组定义、添加、删除 2. 测针定义
旋转探头 增加测针
创建探针组 增加测针
三次元培训资料
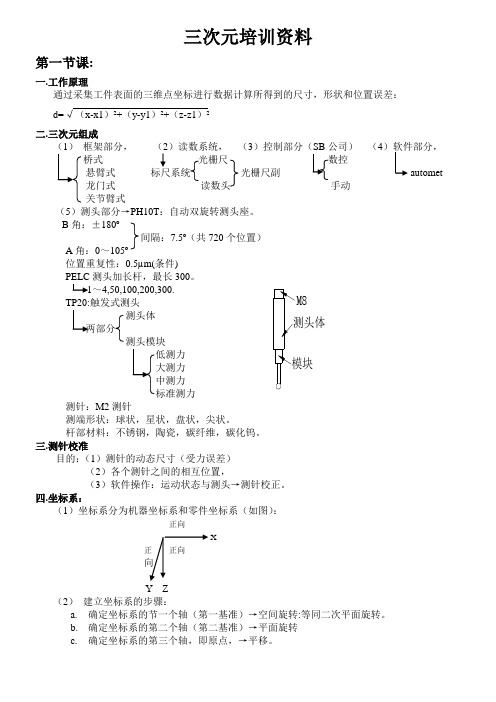
块头体M8三次元培训资料第一节课:一.工作原理通过采集工件表面的三维点坐标进行数据计算所得到的尺寸,形状和位置误差:d=√(x-x1)²+(y-y1)²+(z-z1)²二.三次元组成框架部分,(2)读数系统,(3)控制部分(SB 公司) (4桥式悬臂式 标尺系统 光栅尺副 automet 龙门式 读数头 手动 关节臂式(5)测头部分→PH10T :自动双旋转测头座。
B 角:±180º间隔:7.5º(共720个位置) A 角:0~105º 位置重复性:0.5µm(条件)测头加长杆,最长300。
~4,50,100,200,300.测头体两部分测针:M2测针测端形状:球状,星状,盘状,尖状。
杆部材料:不锈钢,陶瓷,碳纤维,碳化钨。
三.测针校准目的:(1)测针的动态尺寸(受力误差)(2)各个测针之间的相互位置,(3)软件操作:运动状态与测头→测针校正。
四.坐标系:(1)坐标系分为机器坐标系和零件坐标系(如图):正向X正 正向向Y Z(2) 建立坐标系的步骤:a. 确定坐标系的节一个轴(第一基准)→空间旋转:等同二次平面旋转。
b. 确定坐标系的第二个轴(第二基准)→平面旋转c. 确定坐标系的第三个轴,即原点,→平移。
第二节课:一.基本几何元素:1.点元素:点、圆、球、椭圆。
2.线元素:线、圆柱、圆锥(方向性元素)。
3.面元素:面(方向性元素)。
应用基本几何元素:组合元素(功能)组成8个基本几何元素注意:测点不可以组合基本几何元素,只能通过几何元素基本点。
第三节课:一.相关功能:距离、角度、相交、对称、镜像、垂足;点线线线线线→点1、距离点面2、角度线面3、相交线面→点线线面面面面→线线面点点→点点线→点线线→线线线→点点面→点4、对称点点→点5、垂直6、镜像线线→线面面→面点面→点线面→线二.投影功能:xy→z=0 →z=0xz→y=0 点xz→y=0 线x、y、z轴1、点投影到yz→x=0 2、线投影到yz→x=0 3、提取特殊几何元素任意面xy、xz、yz轴三.形状误差:1、母线采点→平面直线度→平行平面→操作 2、连直线3、选择投影面141、采若干个正截面作圆→空间直线度→圆柱→操作 2、每个圆转换成中心点3 42、平面度: 圆度 直接测量得出读数 3、圆柱度a) 采点至少8点,最多40点b) 作成圆柱 ←4点 c) 点圆柱度按健 ←4点第四节课:一、位置误差: 圆柱(线对线)∥ 线对线 1.首先检测基准要素 平行度 平行平面(线对线) 1、定向误差 ⊥ 线对面 操作 2.然后检测被测要素 ∠ 面对线 3.点击相应∥/⊥/∠按钮 垂直度面对面 线对面顷斜度 平行平面注:基准要素无要求,但被测要素却不能由组合功能得到的元素只能由测量点构成的元素 ◎ 2、定位误差同心度⊙基准被测点元素 a.同轴度◎ 轴线长短决定同轴度◎,基准是线元素,被测是圆柱 同心度操作步骤:①选择投影面②基准要素③被测要素④点击“⊙” 同轴度操作步骤:①基准要素②被测要素→圆柱③点击“◎”b.对称度:面对面→操作步骤:①基准要素②被测要素③另一个被测要素④点击“ ” 采点要对应。
三次元培训教程

二. 坐标系建立 2. 迭代法坐标系建立原理及方法 无CAD模型时迭代法坐标系的建立
如果沒有CAD模型, 创建的元素必须正确输入其理论值, 其坐标系建立方法与有CAD模型的 建立方法一致!
26
二. 坐标系建立 3. 最佳擬合坐标系建立原理及方法 用途与原理:
此方法可提高坐标系精度, 特別是对于曲线曲面类零件, 通过理论曲线和实际曲线的匹配得 到更精确的坐标系. 常用于有CAD模型的情況. 如下图所示, 该零件沒有任何可用于测量的元 素, 只能用最佳擬合坐标系建立方法建立坐标系.
16
一. 测头校验 4. 盤形测针定义及校验 盤形测针校验:
取消该选项
17
一. 测头校验
4. 盤形测针定义及校验
特別说明:
由盤形测针的结构可知, 盤形测杆的工作面为边缘部分, 而下表 面不能使用! 因此, 在校验盤形测针时, 不能使用盤形测针下表 面去点击标准球頂面, 而是先换上一根球形测针进行校正以找到 标准球的位置, 再换上盤形测针进行自动校正!
可在此输入添加 也可在此选择添加
12
一. 测头校验 3. 柱形针定义及校验
校验采点数 专用于校验柱形针之圆柱部分 校验圆柱有校长度
13
一. 测头校验 3. 柱形针定义及校验
在前一对话框中点击 Measure键, 出现如下提示框:
在上一次校验操作之后, 如果标准球位置改变, 则必须点 “Yes”, 以便手动在标准球 上采点, 反之选择 “No”. 如果选择 “Yes”, 会出现如下提示框, 回答 “OK” 即可.
14
一. 测头校验 4. 盤形测针定义及校验 盤形针结构分析
(以厚度为2mm的盤形针为例):
注意: 此为盤形针的工作 部分. 其边缘为球面的一 部分!
三次元培训教材

影视制作案例
影视制作案例
在影视制作中,三次元技术可以用于 特效制作、场景搭建、道具设计等方 面,提高电影或电视剧的视觉效果 模技术,将实物道具转化为数字模型, 进行特效制作和场景合成,打造出更 加震撼的视觉效果。
07
总结与展望
总结
教材内容丰富
本教材涵盖了三次元领域的多个 方面,包括基础知识、技能提升、 案例分析等,为学习者提供了全
面的学习资源。
实践性强
教材注重实践应用,通过丰富的 实例和案例分析,帮助学习者掌 握实际操作技能,提高解决实际
问题的能力。
结构清晰
教材结构清晰,层次分明,便于 学习者系统地掌握知识体系,提
高学习效率。
未来发展方向
更新内容
随着三次元技术的不断发展,教材内容需要不断更新和完善,以 反映最新的技术和趋势。
总结词
市面上有许多三次元软件可供选择,如Maya、3ds Max、Blender等。
详细描述
Maya是一款专业的三维动画软件,功能强大,广泛应用于电影、游戏和广告行业。3ds Max是一款面向建筑师 和设计师的三维渲染和建模软件,适用于创建室内设计和建筑可视化效果。Blender是一款开源的三次元软件, 适合初学者和小型制作团队使用。
渲染概念
渲染是利用计算机图形学和图 像处理技术,将三维模型转换 成二维图像的过程。
渲染流程
包括几何、光照、纹理、渲染 等步骤,其中光照是渲染中的 核心部分。
渲染器类型
分为扫描线渲染器、光线追踪 渲染器和全局光照渲染器等。
高级渲染技术
01
02
03
光线追踪
利用光的折射、反射和漫 反射等特性,模拟真实的 光照效果,提高图像质量。
2024年三次元培训教程
三次元培训教程引言:随着科技的不断发展,三次元技术已经逐渐成为各个领域的重要组成部分。
为了帮助大家更好地了解和应用三次元技术,我们特此推出本教程,通过系统的培训,让您掌握三次元技术的核心知识和应用技巧。
第一章:三次元技术概述1.1三次元技术的定义三次元技术,又称三维技术,是指通过计算机技术对三维空间进行建模、渲染、动画等处理,从而实现虚拟现实、增强现实、三维打印等功能的技术。
1.2三次元技术的应用领域三次元技术广泛应用于工业设计、建筑设计、影视动画、游戏开发、虚拟现实、医疗仿真、教育等领域。
1.3三次元技术的发展趋势随着科技的不断进步,三次元技术将更加智能化、自动化、普及化,其应用领域也将进一步扩大。
第二章:三次元建模技术2.1三次元建模的概念三次元建模是指通过计算机软件创建三维模型的过程,包括几何建模、纹理映射、光照渲染等步骤。
2.2常用的三次元建模软件常用的三次元建模软件有AutodeskMaya、3dsMax、Blender、ZBrush等。
2.3三次元建模的基本流程(1)确定建模目标(2)收集参考资料(3)创建基础模型(4)细化模型(5)纹理映射(6)光照渲染第三章:三次元渲染技术3.1三次元渲染的概念三次元渲染是指将三维模型转换为二维图像的过程,包括光线追踪、阴影、反射折射等效果。
3.2常用的三次元渲染软件常用的三次元渲染软件有V-Ray、Arnold、Corona、mentalray 等。
3.3三次元渲染的基本流程(1)设置渲染器(2)调整材质和灯光(3)设置渲染参数(4)渲染输出第四章:三次元动画技术4.1三次元动画的概念三次元动画是指通过计算机软件创建三维动画的过程,包括角色动画、场景动画、特效动画等。
4.2常用的三次元动画软件常用的三次元动画软件有AutodeskMaya、3dsMax、Blender 等。
4.3三次元动画的基本流程(1)确定动画目标(2)创建动画模型(3)设置关键帧(4)调整动画曲线(5)渲染输出第五章:三次元技术的应用实例5.1工业设计领域通过三次元技术,设计师可以快速创建和修改产品模型,提高设计效率。
三次元培训教程(一)

三次元培训教程(一)引言概述:本文是关于三次元培训教程(一)的文档。
三次元培训教程旨在帮助学员全面了解三次元技术的基础知识和应用实践。
本文将从五个大点展开介绍,包括三次元技术概述、三次元建模基础、三次元渲染技术、三次元动画制作和三次元应用案例等。
通过这些内容的学习,读者将能够掌握三次元技术的核心概念和应用方法,并能够在实践中灵活运用。
正文:一、三次元技术概述1. 三次元技术的定义和发展历程2. 三次元技术在电影、游戏和虚拟现实等领域的应用3. 三次元技术的核心原理和关键技术要点4. 三次元技术与传统二维技术的比较和区别5. 三次元技术的未来发展趋势和前景二、三次元建模基础1. 三次元建模的基本概念和原则2. 三次元建模软件的选择和使用3. 三次元建模的基本技术和步骤4. 三次元建模的常见问题及解决方法5. 三次元建模实例分析和实践操作指导三、三次元渲染技术1. 三次元渲染的基本原理和技术框架2. 三次元渲染的光影效果和纹理贴图技术3. 三次元渲染的渲染器选择和参数设置4. 三次元渲染中的渲染优化和效率提升策略5. 三次元渲染实例分析和渲染效果调优指南四、三次元动画制作1. 三次元动画制作的基本流程和技术要素2. 三次元动画制作软件的选择和使用3. 三次元动画的关键帧设计和插值技术4. 三次元动画的角色建模和动作捕捉技术5. 三次元动画的渲染和后期制作技巧五、三次元应用案例1. 三次元技术在电影制作中的应用案例2. 三次元技术在游戏开发中的应用案例3. 三次元技术在虚拟现实领域的应用案例4. 三次元技术在建筑设计中的应用案例5. 三次元技术在教育培训中的应用案例总结:通过本文的介绍,我们了解了三次元培训教程(一)的内容架构和学习目标。
本教程共分为五个大点,包括三次元技术概述、三次元建模基础、三次元渲染技术、三次元动画制作和三次元应用案例等。
每个大点下包含了5-9个小点,涵盖了三次元技术的核心知识和应用实践。
三次元培训教程

三次元培训教程引言:随着科技的不断发展,三次元技术已经逐渐成为各个领域的重要组成部分。
为了帮助大家更好地了解和应用三次元技术,我们特此推出本教程,通过系统的培训,让您掌握三次元技术的核心知识和应用技巧。
第一章:三次元技术概述1.1三次元技术的定义三次元技术,又称三维技术,是指通过计算机技术对三维空间进行建模、渲染、动画等处理,从而实现虚拟现实、增强现实、三维打印等功能的技术。
1.2三次元技术的应用领域三次元技术广泛应用于工业设计、建筑设计、影视动画、游戏开发、虚拟现实、医疗仿真、教育等领域。
1.3三次元技术的发展趋势随着科技的不断进步,三次元技术将更加智能化、自动化、普及化,其应用领域也将进一步扩大。
第二章:三次元建模技术2.1三次元建模的概念三次元建模是指通过计算机软件创建三维模型的过程,包括几何建模、纹理映射、光照渲染等步骤。
2.2常用的三次元建模软件常用的三次元建模软件有AutodeskMaya、3dsMax、Blender、ZBrush等。
2.3三次元建模的基本流程(1)确定建模目标(2)收集参考资料(3)创建基础模型(4)细化模型(5)纹理映射(6)光照渲染第三章:三次元渲染技术3.1三次元渲染的概念三次元渲染是指将三维模型转换为二维图像的过程,包括光线追踪、阴影、反射折射等效果。
3.2常用的三次元渲染软件常用的三次元渲染软件有V-Ray、Arnold、Corona、mentalray 等。
3.3三次元渲染的基本流程(1)设置渲染器(2)调整材质和灯光(3)设置渲染参数(4)渲染输出第四章:三次元动画技术4.1三次元动画的概念三次元动画是指通过计算机软件创建三维动画的过程,包括角色动画、场景动画、特效动画等。
4.2常用的三次元动画软件常用的三次元动画软件有AutodeskMaya、3dsMax、Blender 等。
4.3三次元动画的基本流程(1)确定动画目标(2)创建动画模型(3)设置关键帧(4)调整动画曲线(5)渲染输出第五章:三次元技术的应用实例5.1工业设计领域通过三次元技术,设计师可以快速创建和修改产品模型,提高设计效率。
蔡司培训教材
探 针 系 统
四、自动更换探针
增加库位盒 定义主探针长度 定义库位盒位置 定义库位盒探针 定义接近参数 自动取放探针
自动探针更换
备注:库位的定义添加需要
用主探针进行
探 针 系 统
五、手动校动探针
备注:
校准判断 主探针 s<=0.0005mm 工作探针 s<=0.001mm
自动校准探针
数 据 备 份
一、数据的备份
程序文件的备份 Config文件夹的备份 配置文件的备份
要数据备份文件存放的路径
机 器 配 置
一、机器配置
设置路径
需要配置的有:
机器 探头 温度
管理员
控制
配置对话框
曲 线 知 识
一、曲线种类
2D曲线 3D曲线
二、曲线生成
名义值导入
公式生成
二、软件
Calypso软件 版本:4.10
硬 件 知 识
三、使用环境
温度:20℃±2℃ 湿度:50%±10% 气源:6磅 气压:4.8~5.2磅 电源:稳压、UPS
四、简单维护
每日酒精清理导轨 导轨上不能摆放物品 不要挤压导轨
Thanks!!!
a) 安全平面 b) 安全距离 c) 回退距离 d) 探针组的设定 e) 探针的设定
二、运行程序
1. 2. 设点 置击 运运 行行 程程 序序 参图 数标
CNC 编 程
运行程序图 标
1
2
3
4 5
6 7
8
CNC 编 程
三、导入CAD模型编程
导入模型的三种格式 从模型上采集元素 修改所采集元素的策略