carsim的动力学模型基础方程
基于CarSim的整车动力性建模
基于CarSim的整车动力性建模张绅山东省潍坊市潍坊学院 山东省潍坊市 261061摘 要: C arSim软件是一款越来越受到汽车研发人员喜爱的一款汽车仿真软件,利用软件对汽车进行整车建模以及仿真测试,可以通过三维动画或者数据图表分析仿真结果,从而便于汽车研发人员提升汽车的各项性能。
本文是针对汽车动力性进行建模仿真,文章首先对CarSim软件进行了简单介绍以及简单的使用教学,介绍了汽车动力性研究意义、影响因素及评价指标等相关内容,最后介绍了CarSim中车辆的各个部分参数设置问题。
关键词:CarSim;动力性;整车建模;仿真1 CarSim软件介绍1.1 CarSim软件的简介CarSim是一款专门针对中小型汽车的仿真软件,软件在本质上就是先建立一个车辆模型,再根据自己的仿真内容进行参数设置,处理器运算以后通过3D动画或表格数据展示仿真结果。
利用CarSim在计算机上进行模拟仿真速度比实际测试实验速度快许多倍,软件可以用来仿真车辆对驾驶员、地面情况等输入的响应,主要用来帮助提升汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性。
现如今CarSim凭借自身的优势已经逐渐被更多研发人员所应用。
CarSim软件系统可以与许多软件共同进行模拟仿真,例如CarSim和Simulink的协同仿真,从Simulink的各种变量中选择需要的导入到CarSim中进行模拟仿真,变量包括车辆控制输入、轮胎力和力矩、弹簧和阻尼力、转向系统驱动角度、传动系扭矩、制动扭矩和制动压力、空气动力学相关变量等超过160个变量。
CarSim建模和仿真后的数据也可以导出到其他模拟软件作为数据源进行模拟仿真和数据分析。
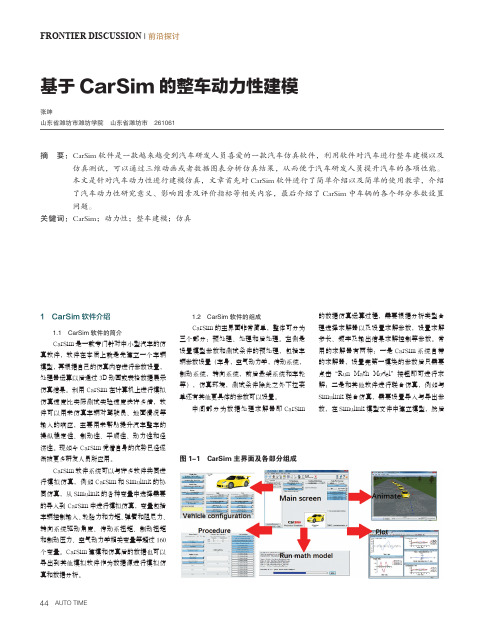
1.2 CarSim软件的组成CarSim的主界面非常简单,整体可分为三个部分:预处理、处理和后处理。
左侧是设置模型参数和测试条件的预处理,包括车辆参数设置(车身,空气动力学,传动系统,制动系统,转向系统,前后悬架系统和车轮等),仿真环境,测试条件除此之外下拉菜单还有其他更具体的参数可以设置。
Carsim整车建模参数

Carsim整车建模参数一车体空载情况下的车体信息(1) 簧上质量的质心距前轴的距离mm (2) 簧上质量质心距地面的高度mm (3) 轴距mm(4) 质心的横向偏移量mm(5) 簧载质量kg(6) 对x轴的极惯性矩(lxx)kg-m2 (7) 对y轴的极惯性矩(lyy)kg-m2 (8) 对z轴的极惯性矩(lzz)kg-m2 (9) 对x、y轴的惯性积(lxy)kg-m2 (10) 对x、z轴的惯性积(lxz)kg-m2 (11) 对y、z轴的惯性积(lyz)kg-m2二空气动力学(1) 空气动力学参考点X mm(2) 空气动力学参考点Y mm(3) 空气动力学参考点Z mm(4) 迎风面积 m21(5) 空气动力学参考长度 mm(6) 空气密度 kg/m3(7) CFx(空气动力学系数)与slip angle (行车速度方向与空气流动方向的夹角)的关系(8) CFy与slip angle的关系(9) CFz与slip angle的关系(10) CMx与slip angle的关系(11) CMy与slip angle的关系(12) CMz与slip angle的关系三传动系1 最简单的一种(1) 后轮驱动所占的比值,为1时,后轮驱动;为0时,前轮驱动(2) 发动机的功率KW2 前轮驱动或后轮驱动1)发动机特性(1) 各个节气门位置下,发动机扭矩(N-m)与发动机转速(rpm) 的2关系(2) 打开节气门的时间迟滞sec(3) 关闭节气门的时间迟滞sec(4) 曲轴的旋转惯量kg-m2(5) 怠速时发动机的转速rpm2)离合器特性a 液力变矩器(1) 扭矩比(输出比输入)与速度比(输出比输入)的关系 (2) 液力变矩器的参数1/K与速度比(输出比输入)的关系 (3) 输入轴的转动惯量kg-m2(4) 输出轴的转动惯量kg-m2b 机械式离合器(1) 输出的最大扭矩(N-m)与离合器接合程度(0代表完全结合,1代表完全分离)的关系(2) 接合时间迟滞sec(3) 分离时间迟滞sec(4) 输入轴的转动惯量kg-m2(5) 输出轴的转动惯量kg-m23)变速器(1) 正向挡位和倒挡的传动比,转动惯量(kg-m2),正向传动与反3向传动效率(2) 中间挡的转动惯量(kg-m2)(3) 换挡时间sec(4) 各个挡位中低速齿轮的输出转速(rpm)与节气门开口位置的关系4)差速器(1) 左右车轮扭矩差(N-m)与车轮速度差(rpm)的关系 (2) 抗扭刚度N-m/deg(3) 抗扭阻尼N-m-s/deg(4) 传动比(5) 正反向的传动效率(6) 驱动轴的惯性量kg-m2(7) 半轴到左侧车轮的惯性量kg-m2(8) 半轴到右侧车轮的惯性量kg-m2还包括传动系(不包括发动机)的自然频率(Hz)与阻尼率3 四轮驱动与前轮驱动相比,增加分动箱,其中包括:(1) 前后轴的扭矩差(N-m)与前后轮的转速差(rpm)的关系 (2) 分配到后轮上的扭矩(百分比形式)4(3) 传动比(4) 扭杆刚度N-m/deg(5) 扭杆阻尼N-m-s/deg还包括传动系的正效率与逆效率四制动系统1 简单制动系统(1) 制动力矩(N-m)与车轮汽缸压力(MPa)的关系,分左前轮,右前轮,左后轮,右后轮,为一比例常数或一条变化曲线 (2) 比例阀之后的管路压力(MPa)与其输入压力(MPa)的关系,分左前轮,右前轮,左后轮,右后轮,通常为一比例常数(3) 流体动力学时间常数,包括左前,右前,左后,右后,单位为sec (4) 流体迟滞,包括左前,右前,左后,右后,单位为sec (5) 前后车轮ABS工作的滑移率区间(6) ABS工作截止的最低速度km/h(7) 经ABS控制后输出的压力MPa2 考虑助力与热衰退的制动系统(1) 比例阀输出压力(Mpa)与比例阀输入压力(Mpa)的关系,包5括左前,左后,右前,右后(2) 制动盘质量kg(3) 在0摄氏度时制动盘的比热kJ/kg/C(4) 单位温度升高比热的变化量kJ/kg/C2(5) 制动钳压力(MPa)与制动钳体积(mm3)的关系 (6) 制动钳气缸中单位流量所产生的压力MPa/(mm3/s) (7) 冷却系数(1/s)与车辆速度(km/h)的关系(8) 不同制动盘温度(C)下,制动力矩(N-m)与制动轮缸压力(Mpa)的关系(9) 控制策略(A型为调节主缸后的压力值;B型为调节比例阀后的管路压力;也可不控制)(10) 四个车轮的制动盘初始温度(C)(11) 空气温度(C)(12) 助力后输出的力(N)与助力前输入的力(N)的关系,助力后输出的力为主缸压力(13) 踏板的杠杆比(14) 主缸直径mm(15) 启动助力的时间迟滞sec(16) 关闭助力的时间迟滞sec6五转向系统1) 转向柱管系统:(1) 转向柱管的惯性kg-m2(2) 转向系统的惯量kg-m2(3) 转向柱管阻尼Nm-s/deg(4) 转向柱管干摩擦N-m(5) 转向盘自由角行程deg2) 主销的几何特性:(1) 汽车前进方向投影,主销轴线与半轴轴线的交点距车轮中心的距离mm,包括四个车轮(2) 主销内倾角deg(3) 主销后倾角deg(4) 水平路面行驶,汽车侧面投影中,车轮质心所驶过的直线与主销轴线的交点距车轮中心的距离mm3) 前轮转向方式包括非助力齿条齿轮式和循环球式,助力齿条齿轮式和循环球式助力齿条齿轮式(1) 齿条的行程(mm)与齿轮转角(deg)的关系 (2) 左右转向轮转角(deg)与齿条的行程(mm)的关系7(3) 因转向系统柔性所引起的转向角(deg)随主销力矩(N-m)的关系,主销力矩为左右主销力矩之和。
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模一、本文概述随着电动汽车技术的快速发展,分布式驱动电动汽车(Distributed Drive Electric Vehicles, DDEV)因其高效能源利用、优越操控性能以及灵活的驱动方式,正逐渐成为新能源汽车领域的研究热点。
为了更深入地理解和研究DDEV的动态特性与控制策略,建立精确的车辆模型是关键。
本文旨在探讨基于Carsim与Simulink 联合仿真的分布式驱动电动汽车建模方法,以期在车辆动力学建模、控制策略优化和系统集成等方面提供有效的技术支撑。
本文首先介绍分布式驱动电动汽车的基本结构和特点,阐述其相较于传统车辆的优势。
随后,详细介绍Carsim和Simulink两款软件在车辆建模和仿真分析方面的功能和特点,以及它们联合仿真的优势。
接着,将重点介绍如何利用Carsim建立DDEV的车辆动力学模型,包括车辆动力学方程、轮胎模型、驱动系统模型等。
将探讨如何利用Simulink构建DDEV的控制策略模型,包括驱动控制、制动控制、稳定性控制等。
在建立了DDEV的车辆动力学模型和控制策略模型后,本文将详细阐述如何将这两个模型进行联合仿真,并分析仿真结果。
通过对比分析不同控制策略下的车辆性能表现,验证所建模型的准确性和有效性。
本文还将讨论分布式驱动电动汽车建模面临的挑战和未来的研究方向,为相关领域的研究者提供参考和借鉴。
二、Carsim软件介绍Carsim是一款由密歇根大学开发的高级车辆动力学仿真软件,广泛应用于车辆控制、车辆动力学、主动和被动安全、电动和混合动力车辆以及先进的驾驶员辅助系统等领域的研究和开发。
该软件以模块化的方式集成了车辆各个子系统的动力学模型,包括发动机、传动系统、制动系统、转向系统、悬挂系统、轮胎以及车身等。
Carsim的核心优势在于其强大的物理引擎和精确的仿真能力。
通过精确的算法和详尽的车辆参数数据库,Carsim能够模拟出车辆在各种道路条件和驾驶操作下的动态行为,如加速、制动、转向、侧滑等。
理想差速轮车的动力学模型
理想差速轮车的动力学模型引言差速轮车是一种常见的机动车辆,它通过差速器来控制两个驱动轮的转速差异,从而实现转向和转弯的功能。
理想差速轮车的动力学模型是对差速轮车运动状态和力学特性进行描述的数学模型。
本文将详细介绍理想差速轮车的动力学模型,并探讨其应用。
1. 车辆运动状态描述理想差速轮车的运动状态可以由车辆的位置、速度和方向来描述。
我们可以使用一组状态变量来表示车辆的运动状态,包括车辆的横向位置x、纵向位置y、航向角θ、车辆的速度v和转角δ。
2. 车辆运动方程理想差速轮车的运动方程可以分为横向运动方程和纵向运动方程。
2.1 横向运动方程差速轮车的横向运动方程描述了车辆在横向方向上的运动状态变化。
横向运动方程可以表示为:ẋ=v⋅cos(θ)ẏ=v⋅sin(θ)θ=vL⋅tan(δ)其中,ẋ和ẏ分别表示车辆横向位置的变化率和纵向位置的变化率,θ表示车辆航向角的变化率,L表示车辆的轴距,δ表示车辆的转角。
2.2 纵向运动方程差速轮车的纵向运动方程描述了车辆在纵向方向上的运动状态变化。
纵向运动方程可以表示为:v̇=a其中,v̇表示车辆速度的变化率,a表示车辆的加速度。
3. 力学特性描述差速轮车的力学特性可以通过车辆的质量、惯性矩阵和轮胎的摩擦系数来描述。
3.1 质量和惯性矩阵差速轮车的质量和惯性矩阵可以表示为:]M=[m00I其中,m表示车辆的质量,I表示车辆关于质心的惯性矩阵。
3.2 轮胎摩擦力差速轮车的轮胎摩擦力可以通过摩擦系数和轮胎垂向力来计算。
轮胎摩擦力可以表示为:F f=μf⋅F nF r=μr⋅F n其中,F f和F r分别表示前轮和后轮的摩擦力,μf和μr分别表示前轮和后轮的摩擦系数,F n表示轮胎的垂向力。
4. 动力学模型求解理想差速轮车的动力学模型可以通过数值方法求解。
我们可以使用欧拉法或者龙格-库塔法等数值方法来求解车辆的运动方程。
具体求解过程如下:1.初始化车辆的状态变量,包括横向位置x、纵向位置y、航向角θ、车辆速度v和转角δ。
carsim输入、输出常用变量
输入变量32 IMP_CLT_D1_2(- );离合器控制的前差速器(第二离合器)33 IMP_CLT_D2_2(- );离合器控制后差速器(第二离合器)36 IMP_CLUTCH_D1(- );离合器控制的前差速器37 IMP_CLUTCH_D2(- );离合器控制后差速器51 IMP_DSTEER_L1(度/秒);直接控制车轮的转向齿轮的导数 L193 IMP_FX0_L1(N);纵向力在车轮中心的L1从轮胎(S)122 IMP_FX_L1(N);纵向力轮胎L1126 IMP_FY0_L1(N);侧向力在车轮中心的L1从轮胎(S)155 IMP_FY_L1(N);侧向力轮胎L1188 IMP_FZ_L1(N);垂直力轮胎L1192 IMP_F_BOOST_1(N);转向齿条助推力203 IMP_GEAR_TRANS(- );传动齿轮214 IMP_MODE_TRANS(- );传动方式:-1 - >反向,0 - >中性,1 - > 手动档位选择,2 - 18 - >自动模式的限制(最大齿轮可用)215 IMP_MUX_L1(- );轮胎L1接地纵向摩擦力219 IMP_MUY_L1(- );轮胎L1接地侧摩阻力223 IMP_MX0_L1(N-M);侧倾力矩在车轮中心的L1从轮胎(S)236 IMP_MX_L1(N-M);侧倾力矩轮胎L1244 IMP_MYBK_L1(N-M); L1制动力矩253 IMP_MYSM_L1(N-M); L1转。
瞬间施加到车轮的悬挂质量263 IMP_MY_L1(N-M);滚动阻力矩轮胎L1265 IMP_MY_OUT_D1_L(N-M);前差速器的左输出轴扭矩266 IMP_MY_OUT_D1_R(N-M);前差速器的右输出轴扭矩267 IMP_MY_OUT_D2_L(N-M);后差速器的左输出轴扭矩268 IMP_MY_OUT_D2_R(N-M);后差速器的右输出轴扭矩269 IMP_MY_R1(N-M);滚动阻力矩轮胎R1270 IMP_MY_R2(N-M);滚动阻力矩轮胎R2288 IMP_M_DIFF_D1(N-M);前差速器的扭矩差289 IMP_M_DIFF_D2(N-M);后差速器的扭矩差295 IMP_M_LOCKUP_CLUTCH_CAP(N-M);转矩的最大转矩容量变矩器锁离合器299 IMP_M_OUT_TR(N-M);变速器输出轴扭矩300 IMP_PBK_L1(兆帕); L1制动轮缸(室)的压力304 IMP_PCON_BK(兆帕);制动主缸压力317 IMP_ROT_ENG(转);发动机转速(发动机外部专用)324 IMP_R_EFF_D1(- );前差速器的效率325 IMP_R_EFF_D2(- );后差速器的效率328 IMP_R_GEAR_D1(- );前差速器的齿轮比329 IMP_R_GEAR_D2(- );后差速器的齿轮比334 IMP_STEER_CON_L1(度);L1轮转向齿轮控制(输入非线性转向运动学表)338 IMP_STEER_L1(度);直接控制L1车轮的转向342 IMP_STEER_RACK_CON_L1(毫米);对于L1车轮转向齿条控制(输入非线性转向运动学表)346 IMP_STEER_SW(度);方向盘角度347 IMP_STEER_T_IN(N-M);转向输入扭矩350 IMP_WIND_SPEED(公里/小时);风速相对于地输出变量1 AAx(弧度/秒2)全名:侧倾角加速度。
车辆碰撞避免系统的设计与仿真分析

3110.16638/ki.1671-7988.2021.05.009车辆碰撞避免系统的设计与仿真分析*郭贵中,杨松,程剑锋,舒宁(新乡学院,河南 新乡 453003)摘 要:汽车作为人们日常出行所使用的交通工具,在给我们的生活带来方便的同时,各类交通事故的发生也导致很多人受伤甚至死亡。
为减少乃至避免交通事故的发生,本次研究主要是在不同路面附着状态辨识的基础上进行智能车辆碰撞避免系统的设计,通过联合滑移率和雷达检测的方法进行道路附着状态识别,并运用CarSim 与Simulink 进行联合仿真,对车辆位移、纵向和横向速度以及加速度进行耦合控制分析,验证本次设计的合理性。
关键词:智能车辆碰撞避免;CarSim ;Simulink ;动力学模型;控制策略 中图分类号:U461.91 文献标识码:A 文章编号:1671-7988(2021)05-31-04Design and Simulation Analysis of Vehicle Collision Avoidance System *Guo Guizhong, Yang Song, Cheng Jianfeng, Shu Ning( Xinxiang University, Henan Xinxiang 453003 )Abstract: As a means of transportation for people's daily travel, cars bring convenience to our life. At the same time, various kinds of traffic accidents also lead to many injuries and even death. In order to reduce or even avoid the occurrence of traffic accidents, this study mainly designs the intelligent vehicle collision avoidance system based on the identification of different road adhesion States, identifies the road adhesion state through the joint slip rate and radar detection method, and uses CarSim and Simulink for joint simulation to couple the vehicle displacement, longitudinal and transverse velocity and acceleration Combined with control analysis, the rationality of the design is verified.Keywords: Intelligent vehicle collision avoidance; CarSim; Simulink; Dynamic model; The control strategy CLC NO.: U461.91 Document Code: A Article ID: 1671-7988(2021)05-31-04前言近年来,我国汽车保有量增长迅速,但各类交通事故也给我们带来了巨大的损失。
电动汽车ABS最优滑移率滑模控制研究

电动汽车ABS最优滑移率滑模控制研究尹安东;李聪聪【摘要】设计了一种基于混合趋近律的ABS最优滑移率滑模控制方法,并使用双曲正切函数代替趋近律中的符号函数.结合电动汽车复合制动系统制动力分配策略,制定基于最优滑移率滑模控制的电动汽车ABS控制策略;然后基于CarSim与Simulink联合仿真,运用遗传算法优化滑模控制趋近律参数.实例样车制动仿真试验结果表明该控制方法可以有效地将车轮滑移率控制在最优滑移率处,且遗传算法优化能够改善滑动模态到达过程的动态品质.【期刊名称】《汽车科技》【年(卷),期】2018(000)002【总页数】7页(P8-14)【关键词】电动汽车;滑移率;制动防抱死系统;滑模控制;遗传算法【作者】尹安东;李聪聪【作者单位】合肥工业大学汽车与交通工程学院,合肥230009;汽车技术与装备国家地方联合工程研究中心,合肥230009;合肥工业大学汽车与交通工程学院,合肥230009【正文语种】中文【中图分类】U469.72引言再生制动和制动防抱死是电动汽车的两项重要技术。
再生制动能够回收部分制动能量,延长电动汽车的续驶里程;制动防抱死系统(Anti-lock Braking System, ABS)通过调节车轮的制动力矩,将车轮的滑移率控制在路面能提供峰值制动力相对应的最优滑移率附近,从而防止车轮抱死而发生危险。
再生制动的参与改变了汽车的制动特性,在电动汽车ABS控制中,如何协调再生制动与机械制动是近年来新能源汽车领域重要的研究课题之一[1,2]。
目前ABS最优滑移率控制方法主要有逻辑门限值控制、模糊控制、滑模控制、自适应控制等[3-10]。
其中滑模控制具有响应快速、物理实现简单,鲁棒性良好等优点,是一种良好的处理非线性系统的控制方法,能够很好地实现最优滑移率控制,但在现实系统运用中仍存在一些有待解决的问题,如滑模控制在本质上的不连续开关特性会造成系统的抖振。
本文设计了基于等速趋近律与幂次趋近律相结合的混合趋近律的最优滑移率滑模控制方法,为解决抖振问题,使用双曲正切函数tanh(x)代替趋近律中符号函数sign(x)。
CarSim 笔记
Carsim软件●图形化数据库该图形库包括图形用户界面(SGUI)和图形数据管理系统,是CarSim的主要界面,包括整车模型数据库、控制输入(速度、转向、制动、油门、驾驶员模型、路面信息)数据库、仿真设置(仿真起始时间、距离和仿真频率)数据库。
共有150多组数据库连在一起构成CarSim总的数据库,每一个数据库都是通过不同的界面显示,使得软件易于操作使用。
●车辆数学模型及求解器密歇根大学交通运输研究所(UMTRI)的MichaelSayers博士为汽车及其它多体系统开发了世界上最先进的自动代码生成器。
UMTRI用这种自动代码生成器一AutoSim一构建车辆动力学方程,能很快地创建新模型或扩展现有模型,满足实时及优化的需求:同时能通过更新AutoSim产生新的代码,以迅速满足新的接口及操作系统的需求。
由AutoSim生成的零误差代码支持高精度的数学模型并具有高效的并行运算效率,可大大减少出错的几率,加强软件运算的可靠性,并提高软件的计算速度。
VehicleSim求解器可以迅速求解AutoSim产生的车辆模型运动方程式、计算输出变量、进行频谱分析(spectrumanalyzer),同时求解器内嵌Simulink接口,结合精确数学车辆模型可实现快速的联合仿真。
●仿真动画显示器(SurfaceAnimator)通过动画模拟可显示每一时刻车辆的运行状态、车轮受力和车辆在不同环境(输入)下的动态响应。
新的动画软件SurfaceAnimator运用OpenGL技术,可表现出阴影路面,提供更快、更逼真的动画模拟效果,且易于输出到其它演示文档。
●绘图器(WindowsEngineeringPlotter)可以选择输出某些特性参数随时间或另一特性参数变化的曲线,能产生超过500组变量的仿真曲线,也可生成来自不同车辆模型数据库的仿真对比曲线,或将数据结果输出至其它的软件,如MATLAB、Excel。
与许多面向结构建模的动力学软件如MSC.ADAMS、Altair.MotionView不同,CarSim具有面向参数建模的特点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车动力学模型基础方程
在汽车工程中,动力学模型是一个重要的概念,它描述了汽车在运动
过程中的力学特性和行为。
其中,汽车动力学模型的基础方程起着至
关重要的作用,它们是描述汽车动力学特性的数学表达式,是汽车工
程中的核心理论基础。
一、运动方程
汽车在运动中受到多种力的作用,这些力包括牵引力、阻力、重力等。
通过牛顿第二定律,可以得到描述汽车运动的基本方程:
F = ma
其中,F是受到的合外力,m是汽车的质量,a是汽车的加速度。
根据牵引力、阻力和重力的关系,可以得到更加细致的运动方程:
F_traction - F_drag - F_roll - F_grade = ma
其中,F_traction是牵引力,F_drag是阻力,F_roll是滚动阻力,
F_grade是上坡或下坡时产生的力。
这些力可以通过具体的公式计算
得到,从而得到汽车的加速度。
二、转向方程
在汽车运动中,转向是一个重要的问题。
汽车的转向能力与转向系的设计和轮胎的特性有关。
描述汽车转向行为的基础方程可以通过转向角速度、侧向力和横摆刚度等参数建立,具体方程如下:
Mz = Iz * ωz + Fy * a
其中,Mz是横摆力矩,Iz是车辆绕垂直轴的惯性矩,ωz是车辆的横摆角速度,Fy是轮胎的侧向力,a是车辆的横向加速度。
这个方程描述了汽车在转向过程中受到的各种力的平衡关系。
三、刹车方程
刹车是汽车行驶中不可或缺的部分,汽车刹车性能与刹车系统、轮胎和路面特性等有关。
汽车刹车性能的基础方程可以描述如下:
Fbrake = μ * Fz
其中,Fbrake是刹车力,μ是刹车系数,Fz是轮胎受力。
刹车系数与刹车系统和轮胎的摩擦特性有关,它是刹车性能的一个重要参数。
总结
通过以上的分析可以看出,汽车动力学模型的基础方程是汽车工程中的核心内容,它涉及到多个力学和运动学的概念,并且需要深入的数学和物理知识。
汽车动力学模型的基础方程不仅对汽车设计和优化具有重要意义,对于理解汽车行驶过程中的各种力学特性也有着重要意义。
只有深入理解和掌握这些基础方程,才能更好地理解汽车的运动行为和设计原理。
个人观点
作为汽车工程师,我深刻理解汽车动力学模型的重要性。
在实际工程中,我们需要根据这些基础方程对车辆的各种性能进行分析和优化,以求得更好的驾驶体验和安全性能。
汽车动力学模型的基础方程也是汽车工程教育和研究中的重要内容,它对培养工程学习者的逻辑思维和问题解决能力有着重要作用。
我认为深入理解和掌握汽车动力学模型的基础方程对于汽车工程领域的学习和发展具有重要意义。
总结回顾
在本文中,我们对汽车动力学模型的基础方程进行了解析和探讨。
通过对运动方程、转向方程和刹车方程的分析,我们了解了汽车动力学模型的基础方程在汽车工程中的重要作用,以及它们对汽车设计和性能优化的重要意义。
我们也共享了个人对这一主题的理解和观点。
希
望本文能够帮助读者更好地理解汽车动力学模型的基础方程,并对汽
车工程领域有所启发。
汽车动力学模型的基础方程是描述汽车在运动
过程中的力学特性和行为的数学表达式。
它们是汽车工程中的核心理
论基础,对于汽车的设计、优化和性能提升具有重要意义。
在汽车动力学模型中,运动方程是其中最基础的方程之一。
它描述了
汽车在运动中受到的各种力的平衡关系。
在这个方程中,牵引力、阻力、滚动阻力和上坡/下坡力都被综合考虑,从而得出汽车的加速度。
这个方程不仅能够帮助工程师分析汽车的加速性能,还可以用于优化
汽车的动力系统,提升汽车的燃油经济性和性能表现。
另外一个重要的方程是转向方程。
汽车在转向过程中受到横摆力矩、
侧向力和横向加速度的影响。
转向方程通过描述这些力的平衡关系,
帮助工程师设计优化车辆的悬挂系统和轮胎参数,从而提升车辆的转
向性能和操控稳定性。
刹车方程则描述了汽车刹车性能的基础关系。
刹车力和轮胎受力之间
的关系通过刹车系数来描述,刹车系数在很大程度上取决于刹车系统
和轮胎的摩擦特性。
刹车方程可以帮助工程师设计更有效的刹车系统,提升汽车的安全性能。
在实际的汽车工程应用中,这些基础方程都发挥着重要的作用。
工程
师们可以通过这些基础方程对汽车的各项性能进行分析和优化。
通过
对运动方程的分析,工程师可以优化发动机和传动系统,以提升汽车
的加速性能和燃油经济性。
通过对转向方程的分析,工程师可以设计
更稳定的悬挂系统和轮胎,提升汽车的操控性能和舒适性。
通过对刹
车方程的分析,工程师可以改善刹车系统,提升汽车的安全性能和驾
驶舒适性。
深入理解和掌握汽车动力学模型的基础方程对于汽车工程
中的设计和优化至关重要。
不仅如此,汽车动力学模型的基础方程也是汽车工程教育和研究中的
重要内容。
通过学习这些基础方程,工程学习者可以培养逻辑思维和
问题解决能力,为未来从事汽车工程领域的工作打下坚实的理论基础。
汽车动力学模型的基础方程对于汽车工程领域的学习、发展和实际应
用都有着重要意义。
通过深入理解和掌握这些基础方程,我们可以更
好地理解汽车的运动行为和设计原理,为汽车工程领域的发展和进步
做出更大的贡献。
希望本文能够帮助读者更好地理解汽车动力学模型
的基础方程,并对汽车工程领域有所启发。