半刚性连接刚框架力学模型分析
半刚性连接空间钢框架结构的二阶非弹性分析
维普资讯
第5 期
郑廷银 等 : 半刚性连接空间钢框架结构 的二 阶非 弹性分析
4 7
度 矩阵 的贡 献 。因此 , 该 方 程 可 以 准确 预 测结 构 用 的失稳模 态 与稳 定承 载力 。
对 于三维柱 单 元 的切 线 刚度 矩阵 , 勿需修 正 , 即 直接 采用 二重 非线性 切线 刚 度矩 阵 。
高等分析方法主张 , 在结构分析中充分考虑影响 结构性能的各种非线性因素, 直接计算或验算结构的 整体极限承载力, 彻底免除构件验算步骤…。根据这 概念 , 国内外学者做 了大量工作 , 兴平 、 舒 张文 元 、.. hn 丁洁民 6、 Y RL w’ SL C a[ 、 I J . i [等人利 ]. e
曲变形 。
用塑性铰模型对钢框架结构的双重非线性分析进行
了研究。然而 , 塑性铰模型虽然计算简单 , 效率高 , 但 该模型不能考虑塑性扩展 , , 因此 计算精度差 , 与结构 高等分析的要求有一定的差距 ; 塑性区模型的求解结 果常被视为精确解 , 由于计算量非常巨大 , 但 特别是
模型, 以建立 既具 有足 够精 度 , 又满 足 一定 适 用性 要
求的三维结构高等分析方法。
式中: △ } { } {“ 、 分别 为三维梁柱单元 的节点位移 增量 和节 点力 增 量 ;[ ] 1 k 为 2×1 2阶 的三 维 梁 柱 单元弹性切线 刚度矩 阵, 表达式可见文献 [ ] 其 9 或
考虑 了几何 、 材料和半刚性连接效应。基 于非线性连 续介 质力学理论和考虑 剪切 效应 的稳定插值 函数建 立的严格 三维粱柱 单元 刚度 方程 , 包含 了轴 向、 剪切 、 双向弯曲与扭 转及其各耦合 效应 。三维单 元简化 塑性 区模型 可模 拟 塑 性扩展 , 利用粱单元 两端抗转弹簧 来模拟半 刚性连接 效 应。使 用 包括 几何 、 材料 和连接 非线性 的数值 算例 来检 验
半刚性连接框架结构变形分析
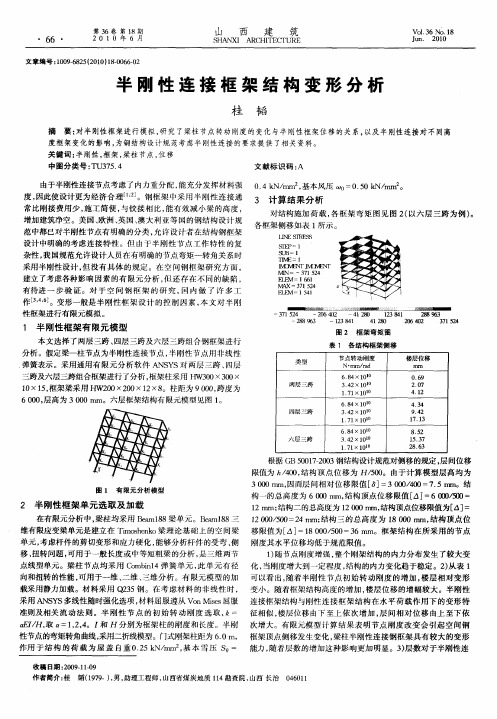
对结构施加荷 载 , 各框架 弯矩 图见 图 2 以六层 三跨为 例 ) ( 。
各框架侧移如表 1 所示 。
范中都 已对半刚性节点有 明确的分 类 , 允许 设计者在结构钢框架
设 计 中 明确 的考 虑 连 接 特 性 。但 由于 半 刚 性 节 点 工 作 特 性 的 复
杂性 , 国规 范允许设计人员在有 明确的节点弯矩一转角关系时 我
。
由于半 刚性连接节点考虑 了内力重分配 , 能充分发挥材 料强 04k m 2基 本 风 压 o =0 5 N . N/ , ) 0 .0k 度, 因此使设计更为经 济合理_' 。钢框架 中采用半 刚性连接通 1 2 J
3 计 算结 果分析
常比刚接费用少 , 施工简便 , 与铰接 相 比, 有效减小 梁的高度 , 能 增加建筑净空 。美国 、 欧洲 、 国、 英 澳大利 亚等国的钢结构设计规
图 1 有 限元 分 析 模 型
构一的总高度为 600r n结构 顶点 位移限值 [ 】 0/1 : 0 g , r z =60050 x 1
2 半 刚性 框架单 元选取 及加载
1 m; 2r 结构二 的总高度为 1 0 , n 200m 结构顶点位移限值为[ = △] 在有限元 分析 中, 梁柱均采用 Ba 8 em18梁单 元。B a 8 em18三 1 0 /0 =2 i; 200 50 4ml 结构三 的总 高度 为 1 0 n, l 80 0m l结构 顶点位 维有限应变梁单元是建立在 Tmohn o梁理论基 础上 的空 间梁 移限值 为[ =1 0 /0 =3 i i sek △] 80 05 0 61m。框架 结构在所采 用的节点 T 单元 , 考虑杆件的剪切变形 和应 力硬化 , 能够分析杆件的受弯 、 侧 刚度其水平位移均低于规范限值。
半刚性连接钢管混凝土框架动力特性的非线性有限元分析
2 0 1 3年 2月
工 程 抗 震 与 加 固 改 造
Vo 1 . 35. No . 1 F e b. 2 Ol 3
Ea r t h q u a k e Re s i s t a n t En g i n e e r i n g a n d Re t r o f i t t i n g
点 采 用 具 有 半 刚性 特 性 的不 同弯 矩 一转 角 曲线 作 为 约 束 条 件 。 对 比 了 2层 两 跨 半 刚 性 框 架 试 验 的荷 载 一 位 移 模 拟 曲线 和试 验 曲线 进 行 模 型验 证 。基 于验 证 结 果 , 对 一 典 型 6层 三 跨 半 刚 性 连 接 的 钢 管 混 凝 土 框 架 进 行 了 模 拟 , 分 析 不 同 连 接 刚 度 条 件 对 钢管 混 凝 土组 合 框 架 的抗 震 性 能 影 响 。结 果 表 明 : 半 刚性 连 接 对 钢 管 混 凝 土 框 架 结 构 的 抗 震 性 能 影 响显 著 。 相 对 于 刚 接 , 采 用 半 刚性 连 接 时 , 钢 管 混凝 土框 架结 构底 层 剪 力 明显 减 小 , 低 阶 振 型 的 自振周 期增 大 , 结 构 动 力 响 应 变化 很 大 。
夏 磊 , 张鹏鹏 , 王文达( 兰 州理工大 学 甘肃省土木工程防 灾减灾重点实验室, 甘肃 兰州 7 3 0 0 5 0 )
[ 提 要] 应用有限元软件 A B A Q U S建 立 半 刚 性 连 接 的 钢 管 混 凝 土 平 面 框 架 模 型 , 采用 S P R I N G 2ቤተ መጻሕፍቲ ባይዱ 元 模 拟 半 刚性 节 点 , 节
[ 文章编号] 1 0 0 2 — 8 4 1 2 《 2 0 1 3 ) 0 1 — 0 0 1 6 — 0 7
半刚性连接对钢框架受力性能的影响
半刚性连接对钢框架受力性能的影响【摘要】采用有限元软件ANSYS对两层和三层的两个单跨钢框架模型分别进行静力、特征值屈曲和模态分析,研究节点半刚性连接钢框架在外荷载作用下的性能,通过与相应的刚性连接钢框架比较,得出半刚性连接对结构内力、位移、稳定性和周期产生的影响。
最后,为使结构设计更合理并与结构实际状态更相符而提出了一些结论和建议。
【关键词】半刚性连接;半刚性钢框架;内力;位移;稳定;周期Effect of Semi-rigid Connection on Performance of Steel FrameFENG Dong-hai ZHU Lian-jun(Design and Research Institute of Zhengzhou Transit,China Railway Engineering Design and Consultant Group Co.,Ltd.,Zhengzhou Henan,450000)【Abstract】With the finite element analysis software of“ANSYS”,one-bay two-floor and three-floor steel frames with semi-rigid connections were analyzed by static analysis,eigen buckling annalysis and modal analysis.The behaviors of internal forces,displacement,stability and period with different rotational stiffness of semi-rigid steel frame were discussed. By comparison with the behaviors of relevant rigid steel frame,the influence of semi-rigid connection on those above-mentioned behaviors was founded. Finally,some conclusion and suggestion is recommended to make the structure design more reasonable and agree with actual appearance of the structure.【Key words】Semi-rigid connection;Semi-rigid steel frame;Internal forces;Displacement;Stability;Period梁、柱连接是钢框架中不可缺少的部分,连接性能直接影响框架结构在荷载作用下的整体行为。
钢框架半刚性连接与分析论文
钢框架半刚性连接研究与分析【摘要】在钢结构设计与分析中,都将框架的梁柱连接节点设计成理想的铰接和刚接。
一般来说,连接对转动的约束达到理想刚接的80%时,就被视为刚接;但当梁柱轴线夹角的改变量在外力作用下达到理想铰接的90%时,即可被视为铰接。
然而,在实际工程中,大部分节点都是处于刚接和铰接之间的,即我们所说的半刚性连接。
半刚性连接,将理想刚接和铰接这两者的特点结合起来,在承受一定弯矩的同时,也产生一定的转角。
所以,半刚性连接钢框架具有其自身的特点,不能简单地将其简化为理想刚接或铰接。
【关键词】钢框架半刚性连接研究性能abstract: in the steel structure design and analysis of the frame beam-column connection will be joint design ideal of a hinged and just answer. generally speaking, the connection to the constraints of turning to achieve the ideal just answer 80%, will be seen as just answer; but when the beam axis angle of change under external force to achieve the ideal of hinged 90% when, can be regarded as hinged. however, in the actual engineering, most of the node is the just answer and between hinged, that what we call semi-rigid connection. semi-rigid connection, ideal to just answer and the characteristics of the two hinged combination, under certain bending moment, but also produce a certain corner. so,semi-rigid connection steel frame has the characteristics of its own, and can’t simply call just ideal or hinged.key words: steel frame semi-rigid connection research performance中图分类号:tu323.5 文献标识码:a 文章编号:引言在钢框架设计中,一般假定梁柱连接是完全刚性或完全铰接。
钢框架半刚性连接研究综述
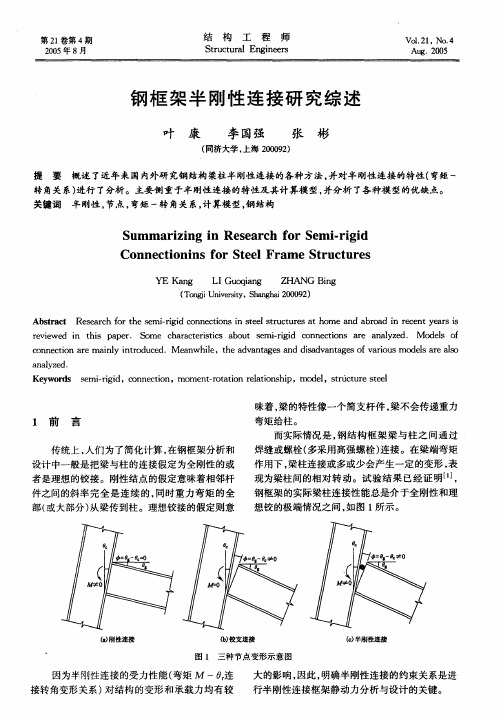
( 1 ) 所有连接所展示的M一 B r 特性, 均处在理 想铰接条件( 水平轴) 和全刚性条件( 垂直轴) 之
! 旬。
在极限情况下, 当重力荷载弯矩等于连接极 限弯矩承载力时, 背风向连接将会像铰接连接, 而 迎风向连接又将像一个线弹性连接, 其刚度等于
初始刚度。
( 2 ) 连接所能传递的最大弯矩( 此处称为极 限弯矩承载力) , 在较为柔性的连接中要降低。 ( 3 ) 弯矩相同时, 连接的柔性愈大, B r 值愈 大。 反之. 对于指定的 B r 值, 柔性大的连接在相邻 杆之间传递的弯矩就要少些。 ( 4 ) 半刚性连接的M一 0 , 关系在全部实际加
载范围内一般是非线性的。
4 连接的模拟
4 . 1 线性模型
如图5 所示三种简单的线性模型:
( 1 ) 单刚度线性模型
采用初始刚度 R k ; 来代表全部加载范围的连
接特性。 当弯矩增加超过连接使用极限后, 这种模 型就不再有效。 ( 2 ) 双线模型 能够更好地表达连接特性, 这种模型在某一 转折弯矩处, 用一条更平坦的线来取代弯矩 一转 角线的初斜率。 ( 3 ) 折线模型 用一组直线段来逼近非线性的M 一9 , 曲线。
妈
转角O r
. | 脚
* 0 1 n 1 t } :0
人 O
{ , ‘ ’
图 4 连接加载 / 卸载特性示例
一 线性
双线性
夏 扮
口 匕
试脸
成许多小组, 每一组跨越 M 的一个小范围。然 后用三次B 样曲线拟合每组数据, 同时保证交点 处各组数据的一阶和二阶导数是连续的。 该模型优点: 能回避负刚度问题, 并能极好地
R b 一 切线刚 度 R a -初始刚度
转角O r
半刚性连接对钢框架结构受力性能的影响

j= 1
EC
j
1 - e- | H| P( 2ja ) + M0 + Rkf | H |
式中 , M0 是曲线拟合的 连接弯 矩初始 值 ; Rkf 是连 接应 变硬化刚度 ; A 是标量参数 , 用来保证数值稳定 ; Cj 是曲线回 归分析得到的曲线拟合常数。 这个模型在曲线拟合试验 数据 方面能够回避负刚度问题 , 并且极好地回避非线性 的 M - H 特性。 31 5 幂函数模型 [ 2] Kishi 和 Chen( 1990) 提出一个幂函数模型 , 其形式为 : H= M Rki [ 1- ( M PMu ) n ] 1Pn
连接方式 均布荷载 5 6
式中 , Rki 为初始连接刚 度 ; Mu 为 连接的 极限 弯矩 承载 力 ; n 为 M - H 曲线的形状参数。 给节点施加弯矩 , 根据 M - H 关 系可得 相应的 转角 , 此 时的节点刚度 R 等于初始刚度 Rki , 因此 , 在弹性阶段就可以 近似地用节点初始刚度 Rki 来模拟节点半刚性 , 用线性 化的 模型来代替非线性的 M - H曲线 [ 3] 。 对于梁柱节点半刚性连 接对刚架受力性能的影响 , 采用螺旋弹簧来考虑节点柔 性对 刚架结构的影 响。 对于任 一梁单 元 i ( 两端 节点为 A, B) , 弹 簧的相对转角 HrA 和 HrB 与弹簧刚度 R kA 和 RkB 与弯矩 MB 的 关系为 : MA = RKA # HrA 4 MB = RKB # HrB 刚性连接与半刚性连接门式刚架的计算比 较 本例对一单层单跨的门式刚架进行计算和分析 , 来 研究 端板连接半刚性节点钢框 架结构 在竖向 荷载作 用下的 受力 性能。计算采用 有限 元软 件 ANSYS 进 行模 拟和 分析 , 梁 柱 均采用 BEAM3 单 元 , 用 COMBINE14 单元 模拟 节 点弹 簧 , 计 算模型见图 3, 梁 柱连接按照半刚性连接进行处理。 荷载作用及计算模型见图 3, 节点和 梁的编 号都在 图中 标出 , 梁柱连接中 的端 板厚度 根据 文献 [ 5] 的 71 21 9 公式 计 算采用 16m m, 端板为 16 @150 @394, 由文献 [ 7] 的 71 21 2 条计 算 , 螺栓采用 81 8 级 高强螺 栓 , 直径 为 16mm, 连 接采 用高 强 度螺栓摩擦 型连 接 , 螺 栓间 距 为 120mm。柱 脚采 用 刚性 连 接。梁柱节点连接的 M- H 模型 采用 Kishi 和 Chen 提出 的
半刚性连接钢框架整体结构屈曲荷载计算模型
第3 期
王新堂 ,等 :半刚性连接钢框架整体结构屈 曲荷载计算模型
35 7
析 与比较得到了一些有价值的结论.
梁 单元 的控 制微 分方 程 为 :
w =0 ( =, ~2 +1 . ,J z +2 n ) () 4
1 半 刚 性 连 接 平 面 框 架 整 体 屈 曲分 析 的 解 析 模 型
第 2 卷 第 3期 1
20 0 8年 9月
宁 波 大 学 学 报 (理 工 版 )
J U NA FN NG O U VE ST NS E) O R L O I B NI R I Y( E
Vb _ l N o 3 l 2 . S p. 2 0 et 0 8
文章 编号 :0 15 3 2 0 10 — 12【 0 8)0 —3 40 30 7 —6
型的 适 用 范 围更 为广 泛.本 模 型 中的 半 刚性 连接 特性 通 过在 所 有 梁柱 连接 处设 置虚 拟 约 束弹 簧
实现 , 弹性支撑则通过在柱顶 引入具有任意刚度参数的水平弹簧实现. 于上述的基本模型, 基 通
过 对 所有 构件 建 立 失稳状 态的控 制 方程 并 引入 相应 的连 续性条 件 和边界 条 件 ,建立 了平 面单 层
任意 多跨框架结构整体失稳 的临界荷载解析计算方法,并研制 了相应的计算程序. 分析 结果表
明 ,半 刚性连 接 特性 和 水平 支撑 效应 对框 架结 构整 体稳 定性 的影 响极 为显 著 ,而且作 用于 多跨
框 架 结构柱 硕 竖 向荷 载 的分 布特征 对 结构 的整 体稳 定性 有 不可 忽视 的影 响.另外 , 结构 的 支撑 刚
图I 为本 文所 研究 的具 有 n 的 半刚性 连 接和 跨
浅谈钢框架结构的半刚性连接

即半刚性连 接。所 以 , 梁柱 连接假 定为理 想刚接或理 把 钢框架是现代多 高层建 筑钢结 构 常用 的结 构体 系。在传统 者之 间 , 的钢框架设计分析过程中 , 一般都假定 满足相应 构造措施的梁 和 想铰接是不科学 , 不符 合实际的 。因此 很有必 要考虑节点半 刚 也 柱 的连接是理想刚接 或者理 想铰 接。理想 刚接就 意味着 相邻杆 性连接的影响 。 件间的斜率完全是连续 的 , 当框架 受载 变形 时 , 柱之 间没有 相 1 欧 美等 国规范 的相 关规 定 梁
后 , 观测成果 、 将 数据 进行 整理 , 对观测 资料进行 归纳 和分析 , 以 作应重视裂缝调查工作 。 便了解裂缝 的特征 , 形 的幅 度 、 势 , 变 趋 再根 据定 期 重复 观测 成 参考 文献 : 果, 判断其稳 定性 , 析寻 找裂缝产 生 的原 因 , 分 对其进行分 类 , 根 [ ] B 5 0 02 0 , 1G 0 1—0 2 混凝土结构设计规 范[ ] S. 据 其性质来判断对建筑物的危害情况 。 [ ] B5 2 219 , 2 G 0 9 —9 9 民用建筑 可靠性 鉴定标 准[ ] S.
浅 谈 钢 框 架 结 构 的 半 刚 性 连 接
叶 汉 成
摘 要: 对钢框架结构半刚性连 接的判定准则 、 连接 类型 、 受力性能以及连 接模 型进 行 了系统 介绍 , 出在钢框架的设计 指 分析过 程中, 应考 虑节点半刚性的影响。 关键词 : 钢框 架, 刚性连接 , 半 受力性能, 连接模型
对转动 , 之间 的夹角保 持不 变 ; 而理想 铰接 的假定 则意味 着梁 的
美国 、 欧洲等 国已经 明确 规定 节点有半刚性连接这种类 型。
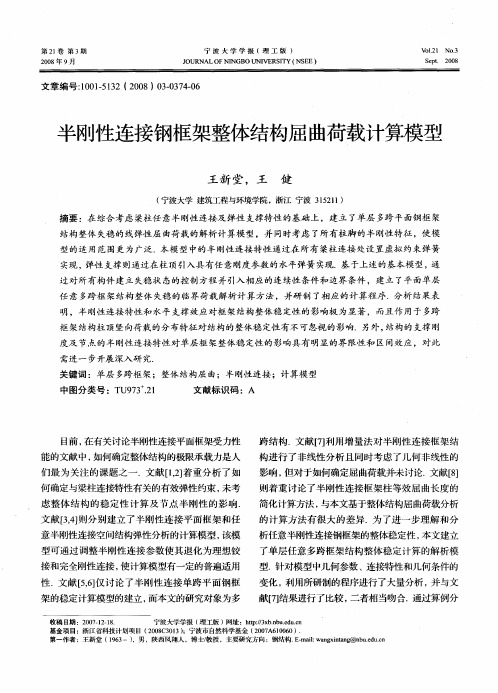
半刚性连接整体钢框架拟动力试验分析
Ab ta t I h e i n o t e r m e ,i i fe s u d t a h o n c i n e we n c l m n n sr c : n t e d sg f s e 1 a s t s o t n a s me h tt e c n e to s b t e o u s a d f
1 实 验及 实验 模 型
c n u t d o h v r l s e lf a e wi e — i i o n c i n S me c n l so s a e g i e , ih o d c e n t e o e a l t e r m t s mirg d c n e t . o o c u i n r a n d wh c h o c n p o i e a x e i n a a i o h a ls e l t u t r e i n c d s a r v d n e p rme t lb ss f rt e t l t e r c u e d sg o e . s Ke r s s e lfa ;s m i i i o n c i n s u o d n m i e t y wo d : t e r me e — g d c n e t ;p e d - y a c t s r o
ห้องสมุดไป่ตู้
半 刚性 连接 整体 钢框 架 拟 动力试 验 分析
完海鹰 , 郑晓清
( 合肥 工 业 大 学 土 木 与 水 利工 程 学 院 , 徽 合 肥 安 200) 3 0 9
半刚性连接刚框架力学模型分析
半刚性连接刚框架力学模型分析摘要:众所周知,节点的刚度影响着钢框架的结构性能。
要准确的确定节点的刚度值需要对节点采用复杂的数值模拟方法(如有限元)。
本文的主要目的是提出一个力学模型以分析节点刚度对框架性质的影响。
力学模型是基于用三个弹簧和一个不产生变形的节点模拟来描述相关节点和单元之间的平动位移和转动位移。
由此模型可以得到梁构件的刚度矩阵和受弯时的荷载向量。
本文举例说明了这种方法的简洁性和实用性。
关键词:刚接;半刚接;连接;计算模型;框架;塑性铰1.引言传统的钢结构分析和设计过程中,框架连接通常简化铰接或者刚接的。
理想的铰接意味着梁柱之间不传递弯矩,理想的刚接意味着连接该节点的构件之间不发生相互转动[1,2]。
但是,这两种情况是实际通常所用的大多数部分传递弯矩的连接的极端形式。
为评估框架的实际性能,有必要考虑连接柔度对框架性能的影响。
连接的柔度取决于紧固件的变形,连接的类型,它们的位置和连接构件的局部变形[7-9]。
连接细部构造涉及结构不同构件间的连接,因此,连接细部构造的任何改变都可能导致连接性质的明显变化[10-12]。
一些研究者如Kishi和Chen[9]收集了现有的实验结果并建立了钢结构连接的数据库,不但能提供给用户实验数据还能给出一些预测性的方程。
但是并不所有的结构工程师都可以接触到这些实验结果,并且当框架分析中连接的细部构造与现有的实验有明显的不同时,通过数据库得到的连接性质并不能正确的反映实际的连接。
De Lima[13]等人利用神经网络的概念来确定梁柱连接节点刚度的初始刚度。
但是这种方法使用范围有限,故作者并没有用实验数据对该方法的正确性加以验证。
Lopez[14]等人分析单层网格时基于数值模拟和实验结果建立了一种模型,该模型考虑了节点的刚度。
Del Savio等人也建立了半刚性连接节点的一种参数化的模型用来分析空腹梁。
梁柱连接实验结果[1,7,8,10_13,16]表明,在所有连接形式中,弯矩—转角关系都是呈非线性的并且随着连接刚度的变化而变化,两者的关系可用以下公式[17,18]表示:θ(1) =kMα由于有大量的参数影响连接的性质,故准确的模拟连接的性质就变得困难起来。
浅谈半刚性与钢框架结构对接技术
不安全或偏于保守的。 因为在实 际工程中。 的刚性 连接 这是 所谓 具有一定的柔度- 而所谓 的理想铰接也是具有一定刚度 。 因此, 把
转 动 刚度 介 于 二者 之 间 的连 接 。 为 半 刚性 连 接 。 称
刚 接 连 接 制 作和 施 工 处 理 很 复 杂 而 半 刚 性 节 点连 接 则 相
刚性 连 接 是 有 限 的转 动 刚 度 。在承 受 弯矩 的 同时 会 产 生 相 应 的 转 角 , 内力 分 析 时 必 须确 定连 接 的 弯矩 转 角 特 性 。 在 以便 考 虑 变 形 的影 响 ” 有 给 出关 系 的 具 体 数值 . 需要 试 验 确 定 。 由此 可 . 没 而 以看 出我 国规 范仅 给 出 了定 性 规 定 . 算 分 析 方 法 上 没 有 给 出 计 明确 的指 示 , 于 半 刚性 连 接 已经 在 我 国工 程 中应 用 . 以 对 其 鉴 所
定 , 许 应 力 设 计 ( S ) 范 (IC 9 9 列 出三 种 类 型 的 连 接 : 容 A D规 AS 18 )
铰接假定 中, 梁与柱之间没有弯矩传递, 仅传递剪力。 梁和柱之间
的转 动 是 相互 独 立 的 。在 理 想 刚性 连 接 假 定 中, 邻 梁 柱之 间不 相
① 类 型 l 刚 性连 接 , 定梁 和 柱 的 连 接 有足 够 的转 动 刚度 . 或 假 能
对 大 体 积混 凝 土 的养 护 , 根 据温 控 措 施 的 要 求进 行 , 混 应 使 凝 土 的 内外 温 差 、 降温 速 率 满 足温 控 指 标 的要 求 。 保温 养 护 的持 续 时 间 , 根 据温 度 应 力 加 以控 制 、 定 , 不 得少 于 1d 保 温 应 确 且 5, 覆盖 的拆 除 应分 层 逐 步进 行 。 保温 过 程 中, 保持 混 凝 土 表面 的 应 湿 润 。在 大 体积 混 凝 土 的养 护 过程 中 , 得采 取 强制 、 均 匀 的 不 不 降温 措 施 。 大体 积 混凝 土 拆 模 后 , 及 时 采 取预 防 寒 潮 袭击 、 应 突 然 降温 和 剧 烈干 燥 等 措施 。
半刚性连接钢框架的内力计算
维普资讯
第 3卷 4
第3 期
四川建 筑科 学研究
Sc u n B i ig S in e ih a ul n ce c d 3 9
20 0 8年 6月
半刚性连接钢框 架的 内力计算
孙 玉萍 , 马洪伟 , 冯东 海
( 兰州理 工大学土木工程学院 , 肃 兰州 甘 7 05 ) 3 0 0
ih s i i on i s r peetdo a s fh e sinp n i e n e ldf t n ae nt s er s wt m -gdcnet n ee rsne nteb i o esproio r c l u dr ma e r ao .B sdo ee ho e . e r i c o w h s t u p t i p s l o i m h t i
摘
要: 采用 比较适 合结构分析 的三参数 力学模型模拟半 刚性连接梁柱节 点 的弯 矩一转角性 能。根据小变 形叠加原 理 , 推导
了半刚接梁单元杆端弯矩 的计算 公式与总 刚度 方程 。在此基础上 , 考虑 了半 刚接钢框 架的几何非 线性 和连 接柔性 的影 响, 利 用有限元方法进行实例分析 , 详细地分析 了刚接框架 与半 刚接框 架的 内力对 比。分 析结果 表明 : 该计算 方法 可靠 , 可供 有关
钢框架半刚性连接分析

钢框架半刚性连接研究与分析摘要:在钢结构设计与分析中,都将框架的梁柱连接节点设计成理想的铰接和刚接。
一般来说,连接对转动的约束达到理想刚接的80%时,就被视为刚接;但当梁柱轴线夹角的改变量在外力作用下达到理想铰接的90%时,即可被视为铰接。
所以,半刚性连接钢框架具有其自身的特点,不能简单地将其简化为理想刚接或铰接。
关键词:钢框架半刚性连接研究性能abstract: in the steel structure design and analysis of the frame beam-column connection will be joint design ideal of a hinged and just answer. generally speaking, the connection to the constraints of turning to achieve the ideal just answer 80%, will be seen as just answer; but when the beam axis angle of change under external force to achieve the ideal of hinged 90% when, can be regarded as hinged. so, semi-rigid connection steel frame has the characteristics of its own, and can’t simply it is reduced to ideal just answer or hinged.keywords: steel frame semi-rigid connection research performance中图分类号: tv332.13 文献标识码:a 文章编号:引言在钢框架设计中,一般假定梁柱连接是完全刚性或完全铰接。
T型钢连接钢框架节点半刚性性能分析
. 4 边界 条件 算, 钢 框 架 的 梁 柱 节 点 连 接 通 常被 假 设 成 完 全 刚 接 或 理 想 铰 1
接 。但是 , 按完全 刚接对 梁柱 节点进 行设 计时 , 其 节点 刚度被 文 章中试 件 利用 A N S Y S的对 称 约 束功 能 取用 半 模 进 行分 试 件关于梁柱腹板 中心 面几何 对称 , 因此施加 约束 和荷 载 也 人为高估 , 导致结构 安 全性偏 低 ; 而按 理想 铰接 考虑则 忽 略 了梁 析 , 不考 虑层 间影 响 , 柱 上 柱节 点约束的有利作用… ; 其 二是 节点构造形 式 的选择 存在一定 关于该 面对称 。柱子 上下 端都 为 固定 铰 , 节点 进行 了较多试验 和研究 【 2 J , 但这 种节 点构 造形 式在工 程质
T型 钢 连 接 钢 框 架 节 点 半 刚 性 性 能 分 析 ★
杨桂权
摘
阎慧群
黎
陟
6 1 0 2 0 7)
( 四川大学建筑 与环境学院 , 四川 成都
要: 利 用有限元分 析软件 A N S Y S对节点进行建模 , 分析结构在承 受竖 向荷载下 的刚度 、 变形 、 承载 力、 破 坏形式 等特征 , 总结 了对 T型钢连接构造 的一些建议 , 并通过模拟分析及 试验 对比 , 得 出了一些 有益 的试 验结论。 关键词 : 钢框架 , T型钢 , 半刚性 节点 , 有 限元分析
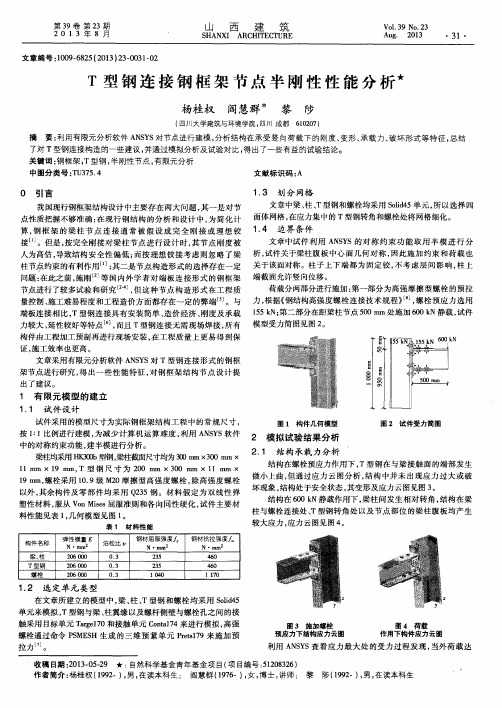
问题 : 在此之前 , 施 刚 等 国 内外学者 对端 板连 接形式 的钢 框架 端截面允许竖 向位移 。 荷载分两部分进行施加 : 第一部分为 高强摩擦 型螺栓 的预拉
根 据《 钢结构高强度 螺栓连接 技术 规程》 J , 螺栓 预应 力选用 量控 制 、 施工难易程度 和工程 造价方 面都存在一 定 的弊端 ] 。与 力 , 5 5 k N; 第二部分在距梁 柱节 点 5 0 0 m i n 处施加 6 0 0 k N静载 , 试件 端板连接 相 比, T型钢连接具 有安装 简单 、 造价经 济、 刚度及 承载 1 。 力较大 、 延 性较好等特点 , 而且 T型钢 连接无需 现场焊接 , 所有 模 型受力简 图见 图 2 构件 由工程加工 预制再 进行 现场安装 , 在工 程质量上更 易得 到保 证, 施工效 率也更高 。
半刚性连接钢支撑框架模态分析

半刚性连接钢支撑框架模态分析关键词: 模态分析;有限元法;钢支撑框架;半刚性钢支撑框架体系是由纯框架体系变化而来,即以纯框架为基本结构,在房屋的纵向、横向或者其他主轴方向,根据侧力的大小,布置一定数量的垂直支撑桁架,框架和垂直支撑形成支撑框架,它属于双重抗侧力结构体系,支撑桁架是第一道防线,框架是第二道防线,由于支撑斜杆一般不承担竖向荷载,所以支撑产生屈曲或破坏不会影响结构承担竖向荷载的能力,不致危及结构的基本安全要求。
然而实际结构总是受到各种动荷载的作用产生振动现象,振动会造成结构因共振或结构疲劳而破坏。
随着钢支撑框架体系大规模的运用,其内部动应力的分析也越来越复杂。
因此 , 钢支撑框架结构的固有振动频率及振型计算分析是其整体设计必须解决的问题,进而避免外力频率和结构的固有频率相同或接近,防止共振现象的发生。
随着有限元理论及计算机技术的发展和广泛应用, ansys 软件能够对钢支撑框架进行有限元建模, 更加全面的分析和评价钢支撑框架的动力性能,对其设计、施工、质量评定具有十分重要的意义。
本文主要运用ansys对二层钢支撑框架结构进行分析,介绍其主要建模过程和动力分析结果[1-3]。
一、模态分析基本原理1.模态分析定义模态分析用于确定设计结构或机器部件的振动特性(固有频率和振型),即结构的固有频率和振型,它们是承受动态载荷结构设计中的重要参数。
同时,也可以作为其他动力学分析问题的起点,例如瞬态动力学分析、谐响应分析和谱分析。
其中模态分析也是进行谱分析或模态叠加法谱响应分析或瞬态动力学分析所必需的前期分析过程。
模态分析在动力学分析过程中是必不可少的一个步骤。
在谐响应分析、瞬态动力学分析的分析过程中均要求先进行模态分析才能进行其他步骤[4]。
模态分析主要分析结构自身的固有振动频率,尽量防止出现结构承受的载荷与其固有频率相同的状况。
一旦外载荷与结构固有频率相同,必然发生共振,造成结构屈服。
典型的无阻尼模态分析求解的基本方程是经典的特征值问题:其中,——刚度矩阵;——第j阶棋态的振型向量(特征向量);——第j阶模态的固有频率(4是特征值)[m]——质量矩阵。
半刚性连接钢框架的弹塑性静力推覆分析
半 刚性 连 接 钢 框 架 的 弹 塑性 静 力 推 覆 分 析
吴 文 军
( 西 工学 院 汽车 工 程 系 , 西 柳 州 5 5 0 ) 广 广 4 06
摘 要 : 于弹 塑 性 静 力 推 覆 分 析 基 本 理 论 , 用 F R R 基 利 O T AN高 级 语 言 编 制 出适 用 于 半 刚 性 连 接 钢 框 架 抗震 性 能分 析 的
关键词 : 覆分析 ; 刚性连接钢框架 ; 推 半 ANS YS; 震 性 能 抗 中图 分 类 号 : 3 1 TU 9 文 献 标 志码 : A
0 引言
随着 世 界经 济 实 力 的增 强 和 技术 水 平 的提 高 , 层 建 筑 的 主要 建 设 材 料逐 渐从 钢 筋 混凝 土 转 向钢 材 . 高 相应 的钢 框 架 结 构体 系 也越 来 越 广 泛 地 应 用 .目前 钢 框 架 结 构 中梁 柱 节 点 连 接 形 式 按 节 点 连 接 方 式分 主
1 4
广 西 工 学 院学 报
第 分 方 程 经 一 足 的 变 换 日 等 效 为 单 目 由 厦 体 系 的 运 动 万 程 , J
空间半刚性钢框架的静力性能分析
作者 简介 : 王新 武(9 1 , 河 南偃师人, 17- 男, ) 博士, 副教授, 主要 从事钢结构方面的研究.
基金项 目:河南省 自然基金项 目(6 1 190. 0 10 0 0 )
不 同扭转方 向的零 长度 弹簧单 元 ,来模 拟粱 的双 向
弯 曲。
第2 期
王新武等 空间半刚性钢框架的静力性能分析
4 3
1 有 限元单元选取及加载求解 . 2
空间钢框架 的梁 、柱均 采用B AM18 E 8 单元 。
材 料特性 采用试 验 数据 ,钢 材 为O2 5 ,实 际屈 3钢
服 强度 为2 7MP ,弹性 模量 为 1 7 ×15 a 8 a . 9 0 MP , 9
采 用A Y 的 多项 性 随动 强化选 项 考虑 材料 的 非 NS S 线 性 。材料 屈服遵 循Vo Mi s n s 屈服 准 则及相 关 流 e
x 正 向施 加 于 各层 柱项 。风 荷 载依 《 筑 轴 建
间钢 框 架进 行 了分析 对 比 ,从 而探 讨 了 空 间钢框 架 的静 力承 载 性 能 与 节 点 刚度 的 关 系 ,得 到 了不 同 节 点 刚度 对 空 间钢 框 架位 移 和 内力 的 影 响 结 果 以 及 随 楼 层 变化 半 刚性 连 接 对 钢 框 架 性 能 的 影 响 研 究 结 果 为 半 刚 性连 接 空 间钢 框 架在 .程 中的应 用提 供 了一 定 的理 论 依 据 。 T -
、 o. 8 1 N o 2 1 . De .2 0 c 0 8
空 间半刚性钢框架的静力性能分析
王新武 ,李跃辉
( . 阳理 工学院 土木工程 系,河南 洛 阳4 12 ;2河南科技 大学 ,河南 洛阳 4 10 1 洛 70 3 . 70 0) 摘 要:对八个带双腹板项底 角钢连接 以及外伸端板 连接 空间钢框 架进行 了非线性有限元分析 ,并与刚・- 1连接 空 9
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
半刚性连接刚框架力学模型分析摘要:众所周知,节点的刚度影响着钢框架的结构性能。
要准确的确定节点的刚度值需要对节点采用复杂的数值模拟方法(如有限元)。
本文的主要目的是提出一个力学模型以分析节点刚度对框架性质的影响。
力学模型是基于用三个弹簧和一个不产生变形的节点模拟来描述相关节点和单元之间的平动位移和转动位移。
由此模型可以得到梁构件的刚度矩阵和受弯时的荷载向量。
本文举例说明了这种方法的简洁性和实用性。
关键词:刚接;半刚接;连接;计算模型;框架;塑性铰1.引言传统的钢结构分析和设计过程中,框架连接通常简化铰接或者刚接的。
理想的铰接意味着梁柱之间不传递弯矩,理想的刚接意味着连接该节点的构件之间不发生相互转动[1,2]。
但是,这两种情况是实际通常所用的大多数部分传递弯矩的连接的极端形式。
为评估框架的实际性能,有必要考虑连接柔度对框架性能的影响。
连接的柔度取决于紧固件的变形,连接的类型,它们的位置和连接构件的局部变形[7-9]。
连接细部构造涉及结构不同构件间的连接,因此,连接细部构造的任何改变都可能导致连接性质的明显变化[10-12]。
一些研究者如Kishi和Chen[9]收集了现有的实验结果并建立了钢结构连接的数据库,不但能提供给用户实验数据还能给出一些预测性的方程。
但是并不所有的结构工程师都可以接触到这些实验结果,并且当框架分析中连接的细部构造与现有的实验有明显的不同时,通过数据库得到的连接性质并不能正确的反映实际的连接。
De Lima[13]等人利用神经网络的概念来确定梁柱连接节点刚度的初始刚度。
但是这种方法使用范围有限,故作者并没有用实验数据对该方法的正确性加以验证。
Lopez[14]等人分析单层网格时基于数值模拟和实验结果建立了一种模型,该模型考虑了节点的刚度。
Del Savio等人也建立了半刚性连接节点的一种参数化的模型用来分析空腹梁。
梁柱连接实验结果[1,7,8,10_13,16]表明,在所有连接形式中,弯矩—转角关系都是呈非线性的并且随着连接刚度的变化而变化,两者的关系可用以下公式[17,18]表示:θ(1) =kMα由于有大量的参数影响连接的性质,故准确的模拟连接的性质就变得困难起来。
总的来讲,初始刚度和极限弯矩是确定节点性质的最重要的两个方面。
[2,17,18]2.力学模型由于有大量的参数影响连接的性质,故准确的模拟连接的性质就变得困难起来。
总的来讲,初始刚度和极限弯矩是确定节点性质的最重要的两个方面。
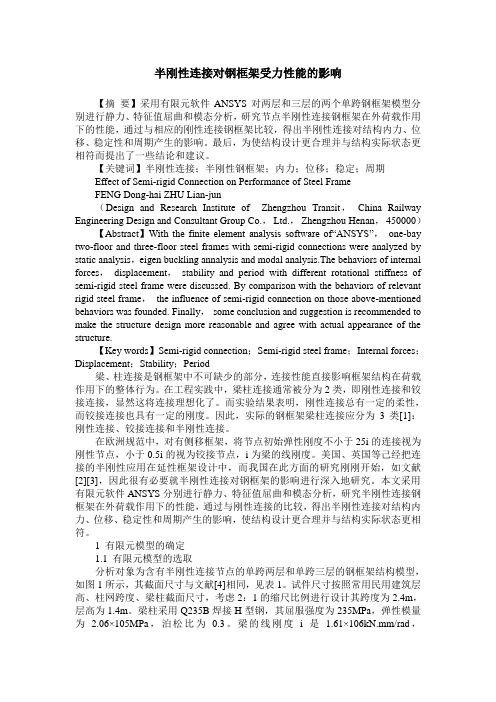
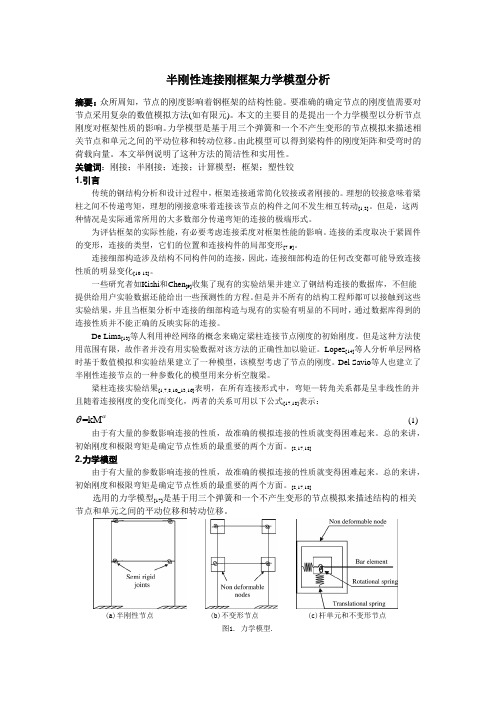
[2,17,18]选用的力学模型[17]是基于用三个弹簧和一个不产生变形的节点模拟来描述结构的相关节点和单元之间的平动位移和转动位移。
(a)半刚性节点(b)不变形节点(c)杆单元和不变形节点图1. 力学模型.图1(a)中结构的节点在图1(b)中用不变形的节点表示,该节点是用平动弹簧单元和转动弹簧单元连接到杆单元上来模拟的,见图1(c)。
因此,杆单元端点处有相对的位移和转动。
建立力学模型的目的是以一个简单的方式导出其刚度矩阵和节点荷载向量。
为此,模型考虑了半刚性节点(图2(b))对应的杆单元承受的横向荷载,见图2(a)。
2.1平衡方程和旋转变形平衡方程可表示为:0i j V V R +-= (2a) 0i j j M M RZ V l ++-= (2b) 建立力学模型的目的是以一个简单的方式导出其刚度矩阵和节点荷载向量。
为此,模型考虑了半刚性节点对应的杆单元承受的横向荷载,见图2(a)。
受弯时,转动弹簧单元起着必不可少的作用,此时,转动变形可以表示为:136ji i MM m ii l l k M ψαωωω∆Θ=+++- (3a)236j iiM M n j j ll k M ψαωωω∆Θ=-++- (3b)(a)横力作用下的杆单元 (b)各种因素影响的节点转动图2.半刚性节点连接节点2.2刚度矩阵框架构件用基于刚度矩阵的位移法分析。
用直接法建立考虑连接刚度后的修正刚度矩阵,即刚度矩阵的k ij 元素代表由于i 方向的单位位移引起的j 方向力。
用直接法建立考虑连接刚度后的修正刚度矩阵,即刚度矩阵的k ij 元素代表由于i 方向的单位位移引起的j 方向力。
局部坐标系的刚度矩阵K e 为:11121314212223243132333441424344e k k k k k k k k K k k k k k k k k = (4)表1 各类连接形式框1梁节点代表在端点处不变形的框架。
正如采用的力学模型中所表示的,梁在节点i,j 两端的刚度是不同的,分别为k 1和k 2。
确定局部坐标系下的单元度矩e K 的每一个元素ij k 都考虑了平衡方程和转动变形。
例如刚度矩阵的元素2j k 就是通过令公式(3a)和公式(3b)中1iθ=,0i ∆=;0j θ=,0R ψ==得到的。
=kM αθ中1α=时为线性情况,此时2211218(12)[4(13)(13)1]k k l k k ωωωω+=-++-(5a)2221212(13)4(13)(13)1k k k k ωωωω+=++-(5b)2321k k =-(5c)241264(13)(13)1k k k ωωω=++- (5d)其它局部单刚e K 可以通过同样的步骤得到。
对于弹簧刚度不同的节点形式,矩阵元素见表1。
值得指出的是,对于一般的普通钢结构建筑,两端连接形式一般是理想化的。
在总体坐标系下,刚度矩阵由下式得到:T e e e e k T K T =(6)其中e T 刚度矩阵的变换矩阵,形式如下:(7)角度β定义了总体坐标系下单元的方向,其中矩阵[]e K 在框1中给出。
2.3节点荷载向量如图3所示,梁两固定端点柔度不同,分别为1k 和2k ,并且受到外部力q 的作用。
得到节点荷载向量需要考虑i,j 节点的不同形式。
图3. 单元刚度矩阵[]e K 中元素2j k局部坐标系下的荷载向量见图4(a),可表示为:e k(7)(a)局部坐标系下的杆单元 (b)半刚性节点支撑的梁图4.杆单元和半刚性节点固端处M i ,Vi和M i,M j见图4(b),计算公式如下:2126[2(13)][4(13)(13)1]im k nl k kMωωωψ+-=-++-(8a)1126[2(13)][4(13)(13)1]jn k ml k kMωωωψ+-=++-(8b)这两个公式是通过节点转动位移的边界条件设为0i i i∆=Θ=Θ=(见图4(b)),由公式(2a),(2b),(3a)和(3b)推导出的。
表2 反力iM和jM对不同类型的节点(不同的约束条件),表2列出了反力iM和jM的计算公式。
节点i和节点j对应的竖直反力iV和jV计算公式,则可通过分别将公式(8a)和(8b)代入公式(2a)和(2b)得到,如下:i jjM M RZlV++=(8c)i jV V R=+(8c)当对称框架受对称竖向荷载作用时,分析只考虑一半的刚架。
因此,反力iM和jM可通过在图5所示的j节点加竖向滑动支座以后计算得到,约束条件为:Vi j j===ΘΘ图5.支撑的悬臂杆单元此时公式(2a),(2b),(3a)和(3b)变为如下公式:2122(12)2[1(])i RZl k l k k M ωωψ++=-++ (9a)1122(12)2[1(])j RZl k l k k M ωωψ-+=++ (9b)i R V = (9c)0i j M M RZ ++= (9d)表3 固端和竖向滑动支座对与竖向滑动支座相关的其它支承情况,表3列出了反力i M 和j M 的计算公式。
总体坐标系下的节点荷载向量可由下式得到:(10)单元内力可由公式(11)计算得到。
[]{}{}e e e K U F = (11)2.4实例分析为验证模型的正确性,需要计算得到一些结果以与文献进行对比。
为此,本文研究了一跨度为16m ,高度为6m 的框架,该框架承受一大小为10KN 的水平集中荷载和一大小为100KN 竖直集中荷载。
通过对刚架采用不同的连接刚度值进行分析,初步提出半刚性连接与梁的刚度相关。
图6.门式刚架[19]表2 反力i M 和j M由现有公式计算得到的弯矩值(见表4),可以推出分析结果与文献[19]结果类似。
3.非线性分析梁柱连接的柔度是通过弯矩—转角曲线表现的,在整个实际的加载过程中,由于轴向变形和剪切变形小于弯曲变形,所以弯矩—转角曲线是非线性的。
这种非线性的关系适用于所有类型的连接[10-12,7-9,16,20],并且随连接的柔度的变化而变化。
图7提出了几种模型以拟合弯矩—转角曲线。
图7. 弯矩—转角曲线拟合模型单调加载情况下,弯矩转角间的非线性关系可表示为:1sc K M K =Θ=Θ (12)在每一个加载阶段,这种关系通过以下关系表示:(1)(1)10j j j k M M +++Θ=(13)其中0j M 为第j 阶段的极限弯矩:第一阶段:(1)(1)1k M =Θ第二阶段:01(2)(2)1k MM +=Θ 其中(1)(2)*011[1]k k M M =-,如图8所示。
图8. 节点极限弯矩在刚架实际设计中弯矩—转角曲线的双线性理想化模型是保守的也是有道理的,这是因为因为实际设计中节点的总体变形特征是必不可少的。
因此,当用弯矩—转角曲线来定义整个节点的特性时,转动变形代表着连接的总体响应。
3.1解决过程:分步方法根据弯矩—转角曲线的形状(双线性和三线性)和结构的状态,分析过程可以分为若干步骤。
第一步,在弯矩—转角曲线的初始阶段,所有节点具有相同的刚度(1)k。
外部荷载逐渐增加直到荷载增量达到节点j 允许达到的图8所示的极限荷载*1M 。
第一阶段荷载增量(1)W∆对应的弯矩增量(1)M∆被认为是第二阶段的残余弯矩。
第二阶段的曲线中,节点j 的柔度变为(2)k,其它节点柔度不变。
荷载继续增加直到荷载增量达到(2)W ∆,此时j 节点总弯矩达到*1M 或者*2M ,见图8。
荷载继续逐渐增加直到施加的总的荷载值达到结构所要承受的荷载值。
()ni iW W ∆=∑(14)因此,结构的最终弯矩等于每一阶段残留弯矩增量的总和。
()ni iM M ∆=∑(15)3.2范例考虑半刚性节点的重要性将在下面的范例中说明。
图9所示的框架是用来对比梁柱受弯时刚性节点和半刚性节点的不同,总共考虑了三种情况,刚接情况,半刚接弯矩—转角关系数为线性(对应(1)k)情况和双线性(对应(1)k和(2)k)情况。
刚架每米抗弯刚度为ω=15067KN m ,受均布荷载W 作用,其中W=35KN/m 。
第一步,在弯矩—转角曲线的初始阶段,所有节点具有相同的刚度(1)k。
(a)范例 (b)节点弯矩—转角曲线图9.文献4中示例第一阶段,所有节点具有相同的刚度(1)k。