圆形工件正次品的检验模型 (数学建模)
圆形工件正次品检验数学模型讲解
由以上方法依次类推,我们就可用计算机编程得到覆盖36个点的最小的圆。
缺点:数据随机性太大,不能处理,极端误差数据 ,所以圆心确定,丢失精度,导致判断结果不准。
模型二:优点:从 maxx,maxy,minx,miny 角度进行筛选,最大程度上避免了极端数据。
缺点:效率比较低下,复杂度为(n^2) 要遍历所有可行解,但每次增加的距离 0.005,不够精确,损失精度
模型三:优点:很好的考虑整体的效果,每次从最小解增长,从而满足所有的情况,
double y1=(TT[1].y+TT[2].y)/2;
double x2=(TT[2].x+TT[3].x)/2;
double y2=(TT[2].y+TT[3].y)/2;
double k1=(TT[2].y-TT[1].y)/(TT[2].x-TT[1].x);
double k2=(TT[3].y-TT[2].y)/(TT[3].x-TT[2].x);
下面是5个工件的测量文件,存放顺序为
( , ),( , ),……,( , )
( , ),( , ),……,( , )
( , ),( , ),……,( , )
( , ),( , ),……,( , )
( , ),( , ),……,( , )
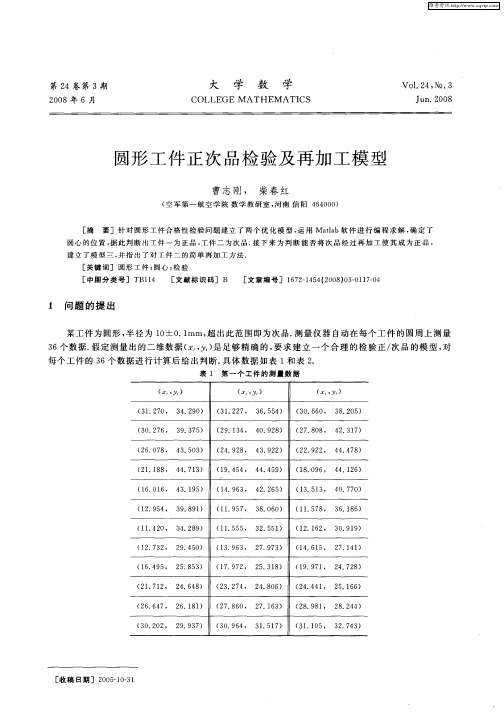
其中 表示第 个工件第 个测量数据(1 5, 1 36)。如第一个工件中 31.270, 34.290, 31.227, 36.554,……, 30.964, 31.517, 31.105, 32.743。
品检中常用的数学模型分析
品检中常用的数学模型分析在品质控制中,数学模型是评估和分析产品或过程的质量的重要工具之一。
数学模型可以帮助品质控制人员了解产品或过程中的潜在问题,并为制定改进措施提供依据。
本文将介绍品质控制中常用的数学模型分析方法,包括统计过程控制、回归分析、方差分析和贝叶斯网络分析。
统计过程控制(SPC)是品质控制中最常用的数学模型分析方法之一。
它通过收集和分析产品或过程的数据,确定其稳定性和可靠性。
SPC通常使用控制图来监控过程的变化。
控制图是一种图形化工具,可以帮助品质控制人员识别出过程中的特殊原因变异,并及时采取相应的措施进行调整。
常见的控制图包括X-Bar图、R 图和P图等。
X-Bar图用于监控过程的平均值,R图用于监控过程的变异性,而P 图则用于监控过程的不良率。
通过分析控制图上的点的分布情况,品质控制人员可以判断过程是否处于控制状态,进而采取相应的控制措施。
回归分析是一种用于研究变量之间关系的数学模型分析方法。
在品质控制中,回归分析可以帮助确定影响产品质量的因素,并建立预测模型。
通过收集产品或过程的数据并进行回归分析,可以找到与产品质量相关的变量,并建立预测模型,从而预测产品或过程的质量状况。
回归分析可以采用线性回归、非线性回归或多元回归等方法进行。
通常,品质控制人员会选择最合适的回归模型,并通过相关系数和回归系数等指标评估模型的拟合度和预测准确性。
方差分析(ANOVA)是一种用于比较多个样本均值是否相等的数学模型分析方法。
在品质控制中,方差分析可以用于确定不同因素对产品质量产生的影响,并找出最重要的因素。
方差分析基于平方和、均方和和F值等统计指标来评估样本均值的差异性。
通过进行方差分析,品质控制人员可以确定最佳因素组合,从而优化产品的质量。
方差分析还可以用于分析不同分组之间的差异,进一步确定改进策略。
贝叶斯网络是一种用于建立概率推断模型的数学模型分析方法。
在品质控制中,贝叶斯网络可以用于分析不同因素之间的依赖关系,并预测产品或过程的质量。
数学建模论文之圆形工件的检
产品检验问题(圆形工件的检验)内容摘要某种圆形工件需要一个检验正/次品的方法,本论文针对该问题,给出了图像分析模型;关键词图像分析模型问题的重述与分析某工件为圆形,半径为10mm±0.1mm,超出此范围即为次品。
测量仪器自动在每个工件的圆周上测量36个数据。
假定测量出的二位数据(xi,yi)是足够精确的,要求建立一个合理的检验正/次品的模型,对每个工件的36个数据进行计算后给出判断。
本问题是一个通过采样评定工件正/次品等级的问题。
问题的数学实质在于判定:36个离散的点能否位于一个r=9.9mm,R=10.1mm的同心圆环之间。
也就是说,我们要做的,是判断对每组数据,能否找到这样一个点,使得题目所给的36个点能够被包含于以该点为圆心,分别以r=9.9mm,R=10.1mm为半径的圆环之间。
我们首先考虑到一种基于图形的分析法,通过直接观察做出判断。
之后,为了寻找一种更通用、更精确的方法,我们考虑一种逐步加细步长的搜索法。
但问题的关键和难点在于,如何尽可能小的确定初始的考查范围(在此处,我们从第一种方法中获得了一些启发)。
另外,还存在着更为快速、有效的算法。
在模型Ⅲ中我们把对半径的限制转化为某一目标函数的约束条件,进而利用惩罚因子,建立无约束的优化模型,并利用Matlab在此方面的强大功能,顺利求解。
基本假设√1.36个数据采样已经能够判定此工件是否为正品;2.不考虑测量误差,即认为所给的数据是足够精确的;√3.数据采样点是比较均匀的分布在圆周上(见封面),以保证采样的全面性,有效性。
4.半径在10mm±0.1mm的范围内的工件为正品,其余为次品。
5.当某工件用我们的模型无法判断是正品或次品时,我们就认为该工件是次品。
符号说明Oi(ai,bi):若第i个工件是正品,用所给36个点所确定的半径为10mm±0.1mm的圆的圆心;Aij(x/ij,y/ij):我们首先将第i组的36个数据在坐标系下表出,以该组的第一对数据为起点,按照顺时针的方向依次标定为Ai1,Ai2,…Ai36(1≢i≢5);Li:由Ai1,Ai2,…Ai36,Ai1按顺序首尾相连而形成的闭合折线;r:r≡9.9mm,即工件半径的下限;R:R≡10.1mm,即工件半径的上限;模型的建立与求解2.模型Ⅰ)图像分析模型我们设计了一种能够直观判断Oi存在与否的方法。
次品规律公式
次品规律公式次品规律公式,这可真是个有趣又有点烧脑的话题。
咱先来说说啥是次品。
想象一下,你去买一包糖果,结果打开发现有几颗味道怪怪的,或者形状不太对,这些不好的糖果就是“次品”。
在数学世界里,次品问题常常出现在找东西的情境中。
比如说,有一堆看起来一模一样的零件,里面混进了几个有缺陷的次品。
那怎么才能用最快最准的方法把这些次品找出来呢?这就得靠咱们的次品规律公式啦。
就拿一个常见的例子来说,有 9 个外观相同的小球,其中 1 个是次品,次品的质量比正品轻一些。
要找到这个次品,咱们可以把这 9 个球平均分成 3 份,每份 3 个。
先称其中两份,如果这两份重量一样,那次品就在没称的那一份里;如果这两份重量不一样,轻的那一份里就有次品。
然后再把有次品的那一份,按照同样的方法,平均分成 3 份,每份 1 个,再称一次就能找出次品啦。
这里面其实就藏着一个简单的规律。
一般来说,如果要找的次品在n 个物品当中,而且知道次品是轻了还是重了,那么用天平称的次数最少就是把 n 尽量平均分成 3 份,称的次数大约是 log₃n(这里的 log₃表示以 3 为底的对数),然后向上取整。
记得我之前给学生们讲这个知识点的时候,有个小家伙特别较真。
他就一直追问我:“老师,为啥要这么分呀?我就想一个一个称不行吗?”我笑着跟他说:“那你想想,如果有100 个小球,你一个一个称,得称到啥时候呀?咱们用这个规律,就能又快又准地找到次品。
”这孩子听了,皱着小眉头想了好一会儿,突然一拍脑袋说:“哎呀,老师我懂啦!”看着他那恍然大悟的样子,我心里可高兴了。
在实际生活中,次品规律公式也挺有用的。
我有次去买鸡蛋,一篮子鸡蛋里我总觉得有几个不太新鲜。
我就想到了这个次品规律公式,虽然不能像称小球那样准确地称出重量,但我通过观察和比较鸡蛋的外观、手感,大概分成几份来挑选,还真让我把那几个不太好的鸡蛋给找出来了。
所以说呀,这个次品规律公式可不只是在数学题里有用,学会了它,能帮咱们在生活中解决不少类似找次品的小难题呢!希望大家以后遇到类似的问题,都能想起这个神奇的次品规律公式,轻松搞定那些隐藏在一堆物品中的次品。
圆形工件正次品检验及再加工模型
第2 4卷
( 0 28, 45 3 1 .O .1 O) ( .5 0, 5 7 ( 0.5 3, 3 ( 3. 85, 一 9 47 1 .1 5) 46 72 . 2) 4 .2 ) 3 78
( .1 5, 4 4 6 7.1 O0) (一 1 4 O, 45 81 .3 .5 ) (一 4. 5, 83 42. 78) 1
曹 志 刚 , 柴 春 红
( 空军 第 一 航 空 学 院 数 学 教 研 室 , 南 信 阳 4 4 0 ) 河 6 0 0
[ 摘
要 ] 针 对 圆形 工 件 合 格 性 检 验 问题 建 立 了 两 个 优 化 模 型 , 用 Mal 运 t b软 件 进 行 编 程 求 解 , 定 了 a 确
[ 图 分 类 号 ] T 14 中 B 1
4 4 2 0 )3O 】一4 文 6 215 (0 8 O 一l 7O
1 问题 的提 出
某工 件 为圆形 , 半径 为 1 ±0 1 0 . mm, 出此范 围即为次 品. 量 仪器 自动在 每个 工 件 的 圆周 上测 量 超 测
( 4. 2 441。 2 5.1 6) 6
( . 7, 26 64
26 81 .1 )
( .8 27 60, 2 16 7. 3)
( 8. 2 981,
28 4 .2 4)
( 0. O2, 2 93 3 2 9. 7)
( . 4, 3 .51 3O 96 1 7)
( 60 一 . 45, 3 .27 9 8) ( 4 97 3 5 ~ . 2, 2. 08) (一 1 53, 28 57 .1 . 2) ( . 4, 27 4 1 92 . 36) ( . 7, 27 66 7 09 . 0) ( I 7I, 3I 04 1 .6 . 6)
数学建模常用各种检验方法

数学建模常用各种检验方法数学建模是利用数学方法解决实际问题的过程。
在进行数学建模时,需要对模型的合理性进行检验,以确保模型的可靠性和准确性。
本文将介绍数学建模中常用的各种检验方法。
1.残差分析方法残差(residual)是指观测值与模型预测值之间的差异。
残差分析可以通过比较残差的大小、分布和形态,来检验模型的合理性。
常用的残差分析方法包括:正态性检验、稳定性检验、独立性检验和同方差性检验。
2.敏感性分析方法敏感性分析(sensitivity analysis)用于分析参数对模型结果的影响程度。
通过改变参数的值,并观察输出结果的变化,可以评估参数对模型的敏感性。
常用的敏感性分析方法包括:单参数敏感性分析、多参数敏感性分析和全局敏感性分析。
3.假设检验方法假设检验(hypothesis testing)用于判断模型的假设是否成立。
通过对模型的假设进行检验,可以评估模型的合理性和拟合优度。
常用的假设检验方法包括:t检验、F检验和卡方检验。
4.误差分析方法误差分析(error analysis)用于评估模型的误差水平。
通过比较实际观测值与模型预测值之间的误差,可以评估模型的准确性和精度。
常用的误差分析方法包括:平均绝对误差(MAE)、均方根误差(RMSE)和平均百分比误差(MAPE)。
5.稳定性分析方法稳定性分析(stability analysis)用于评估模型的稳定性和鲁棒性。
通过对模型进行参数扰动或输入扰动,并观察输出结果的变化,可以评估模型的稳定性和可靠性。
常用的稳定性分析方法包括:参数扰动分析、输入扰动分析和鲁棒性分析。
6.验证方法验证(validation)用于评估模型的预测能力和适用范围。
通过对模型进行验证,可以判断模型在不同情况下的预测效果和适用性。
常用的验证方法包括:留一验证(leave-one-out validation)、交叉验证(cross-validation)和外部验证(external validation)。
《数学建模与数学实验》(第三版)6.5习题作业2
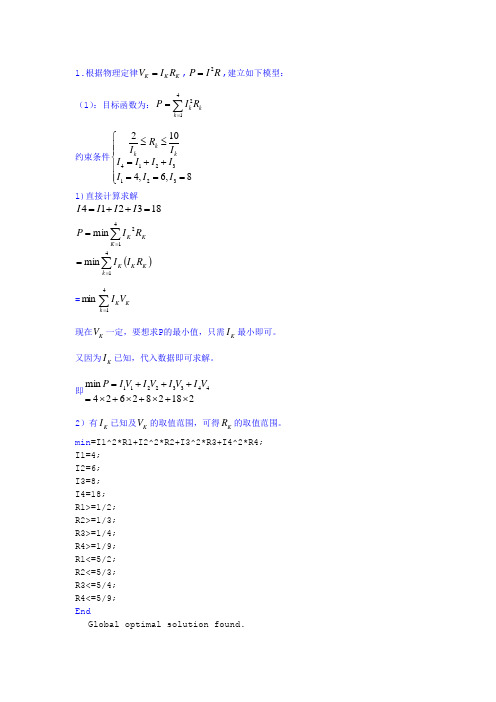
1.根据物理定律K K K R I V =,R I P 2=,建立如下模型:(1):目标函数为:∑==412k k k R IP 约束条件⎪⎪⎩⎪⎪⎨⎧===++=≤≤8,6,41023213214I I I I I I I I R I k k k 1)直接计算求解183214=++=I I I I()K K k K K K K R I I R I P ∑∑====41412min min=K k K V I∑=41min现在K V 一定,要想求P 的最小值,只需K I 最小即可。
又因为K I 已知,代入数据即可求解。
即218282624min 44332211⨯+⨯+⨯+⨯=+++=V I V I V I V I P2)有K I 已知及K V 的取值范围,可得K R 的取值范围。
min =I1^2*R1+I2^2*R2+I3^2*R3+I4^2*R4;I1=4;I2=6;I3=8;I4=18;R1>=1/2;R2>=1/3;R3>=1/4;R4>=1/9;R1<=5/2;R2<=5/3;R3<=5/4;R4<=5/9;EndGlobal optimal solution found.Objective value: 72.00000Total solver iterations: 0Variable Value Reduced Cost I1 4.000000 0.000000 R1 0.5000000 0.000000 I2 6.000000 0.000000 R2 0.3333333 0.000000 I3 8.000000 0.000000 R3 0.2500000 0.000000 I4 18.00000 0.000000 R4 0.1111111 0.000000Row Slack or Surplus Dual Price 1 72.00000 -1.000000 2 0.000000 -4.000122 3 0.000000 -4.000081 4 0.000000 -4.000061 5 0.000000 -4.000027 6 0.000000 -16.00000 7 0.000000 -36.00000 8 0.000000 -64.00000 9 0.000000 -324.0000 10 2.000000 0.000000 11 1.333333 0.000000 12 1.000000 0.000000 13 0.4444444 0.000000(2):目标函数:∑==412k k k R I P 约束条件为:⎪⎪⎩⎪⎪⎨⎧≤≤===≤≤++=628,6,4263213214k kk kI V V V V R V I I II1)183214=++=I I I I()K K k K KK K R I I R I P ∑∑====41412min min=K k K V I ∑=41min)min(44332211V I V I V I V I P +++=要使P 最小,取4V =0,则)min(332211V I V I V I P ++=现在K V 一定,要想求P 的最小值,只需K I 最小即可。
数学建模常用各种检验方法及常用方法

数学建模各种检验方法1.单个总体2Nμσ的均值μ的检验:(,)2σ已知,关于均值的检验用ztest命令来实现.[h,p,ci]=ztest(x,mu,sigma,alpha,tail)2σ已知,关于均值的检验用ttest命令来实现.[h,p,ci]=ttest(x,mu,alpha,tail)2.两个正态总体均值差的检验(t 检验)还可以用t 检验法检验具有相同方差的2 个正态总体均值差的假设。
在Matlab 中由函数ttest2 实现,命令为:[h,p,ci]=ttest2(x,y,alpha,tail)3.分布拟合检验在实际问题中,有时不能预知总体服从什么类型的分布,这时就需要根据样本来检验关于分布的假设。
下面介绍2χ检验法和专用于检验分布是否为正态的“偏峰、峰度检验法”。
2χ检验法0 H :总体x的分布函数为F(x) ,1 H : 总体x的分布函数不是F(x).在用下述χ 2检验法检验假设0 H 时,若在假设0 H 下F(x)的形式已知,但其参数值未知,这时需要先用极大似然估计法估计参数,然后作检验。
偏度、峰度检验4.其它非参数检验Wilcoxon秩和检验在Matlab中,秩和检验由函数ranksum实现。
命令为:[p,h]=ranksum(x,y,alpha)其中x,y可为不等长向量,alpha为给定的显著水平,它必须为0和1之间的数量。
p返回产生两独立样本的总体是否相同的显著性概率,h返回假设检验的结果。
如果x和y的总体差别不显著,则h为零;如果x和y的总体差别显著,则h为1。
如果p 接近于零,则可对原假设质疑。
5.中位数检验在假设检验中还有一种检验方法为中位数检验,在一般的教学中不一定介绍,但在实际中也是被广泛应用到的。
在Matlab中提供了这种检验的函数。
函数的使用方法简单,下面只给出函数介绍。
signrank函数signrank Wilcoxon符号秩检验[p,h]=signrank(x,y,alpha)其中p给出两个配对样本x和y的中位数相等的假设的显著性概率。
数学建模案例分析--最优化方法建模5产品试验与设计

n
n
n
n
(1)
x
k 1
n
jk
1,
j 1,2,, n
(2)
x
j 1
n
jk
1,
k 1,2,, n
(3)
x jk 0,1 j, k 1,2,, n
由于乘积项 x jk x pq 在(1)式中出现,这是一个二次规划模型。
(4)
k 2k / n, (k 1,2,, n) ,于是当叶片 j
安装在位置 k 上时,产生的离心力(向量)可用复数
f ( j, k ) rj eik , eik cosk i sin k
表示。叶片的安装方案可以看作一个任务分派问题,我们引入0—1变量
1 , 叶片j安装在位置k x jk 0 , 否则
则 n 个叶片的合力(向量)为
F r j e i k x jk
j 1 k 1
n
n
问题的目标函数可取合力F的模的平方
Z
约束条件显然为
r e
j 1 k 1 j
n
n
2 i k
x jk
Hale Waihona Puke r j rp cos( k q ) x jk x pq
j 1 k 1 p 1 q 1
*
(3) (4)
*
x
i 1
n
i
1
(5)
x1 , x2 ,, xn 0
*
(6)
其中 y2 是硬度指标下限, y3 是变形率的上限, (5)是将 x1 , x2 ,, xn 作为配比(%)而引入的。 一般来说,这是一个非线性规划模型。实际上,由(1)式确定 y j f j ( x1 , x2 ,, xn ), j 1,2,3 也可视为非线性规划问题,只不过当它们是线性函数时,问题化为线性规划,很容易求解。 例11 某厂生产 n 种饲料 P 1, P 2 ,, P n ,它们均由 m 种原料 Q1 , Q2 ,, Qm 配合而成, Q j 在 Pi 中 含量(百分比)的上限为 uij ,下限为 l ij 。若 Pi 的售价为 pi (元/千克) , Q j 的成本为 q j (元/千
数学建模-圆盘内零件排序
圆盘内零件排序问题摘要:1957年,人类第一颗人造地球卫星在拜科努尔发射场被发射上地球轨道,苏联于1961年4月12日实现了首次载人航天.从此人类便开始了漫长的太空探索。
在中国第一颗人造地球卫星“东方红”一号上天之后,当时的国防部五院院长钱学森就提出,中国要搞载人航天。
1999年11月20日,中国第一艘无人试验飞船“神舟”一号起飞,并成功着陆,接着“神舟”二号,三号,四号相继发射成功.在2003年10月15日9时,我国自行研制的“神舟”五号载人飞船也顺利完成任务。
航天技术被广泛应用于军事侦察和地球资源勘测,以及进行临时性的天文观测和发展航太医学。
航天飞船一般是由轨道舱、返回舱和推进舱三部分组成,推进舱位于飞船的尾部,形状像一个圆筒,主要用于飞船的姿态控制、变轨和制动,因此,在零件的生产和组装过程中对工艺的要求非常高.飞船尾部中一套设备由不同的由24个零件组成,设备的24个零件均匀分布在等分成六个扇形区域的一个金属圆盘的边缘上,零件的排序不仅要是每个区域内的质量之差尽可能小,以保持整个尾部的平衡,而且相邻零件之间体积差距越大越好.本文对此问题建立了三个优化模型,并给出了相应算法,首先由质量约束,以相邻区域质量差最小为目标得出最优方案,再加以各零件的体积约束进行修正,最后对零件质量体积进行灵敏性分析.模型Ⅰ:针对问题一,建立了模型,采用0-1规划模型,引入0-1变量:若第i号(i=1,2,…,24)零件装在第j号区域则C ij=1,否则C ij=0.由于每个零件只能放入一个区域,一个区域只能放4个零件,再结合相邻区域质量差小于4这三个约束条件,再以相邻区域间质量差的总和最小为目标函数,然后用lingo8.0无限制版解出这些变量。
.模型Ⅱ:针对问题二,考虑到不光对区域间质量有约束,而且相邻零件之间体积也有约束,所以问题转化为一个圆盘上24个零件的排序问题,所以将圆盘划分为24个区域,沿用模型Ⅰ的思想,再加上体积约束进行修正,得到模型Ⅱ.即在保证质量最优的前提下加入对各零件的体积约束,限定大于3,用Lingo软件实现.模型Ⅲ:建立方差分析模型,根据给出的数据,分析分布特征,分成两组,用方差分析对数据进行调整,并求出调整范围。
圆形工件的检验
圆形工件的检验内容摘要某种圆形工件需要一个检验正/次品的方法,本论文针对该问题,给出了三个合理、有效的模型:Ⅰ)图像分析模型;Ⅱ)聚焦搜索模型;Ⅲ)规划模型;我们利用这三个模型,分别对题目所给的5组数据进行判断,得到了一致的结论:第1个和第4个零件是正品,第2,3和第5个零件是次品。
结论的一致性,证明了三个模型的正确性。
为了进一步验证模型的稳定性和有效性,我们利用随机生成的10000组数据,对模型Ⅱ)和模型Ⅲ)进行模拟检验,结果令人十分满意。
在模型的进一步讨论中,我们首先讨论了模型的“小区域状态”,并给出了合理的分析,得出了有益的结论:在实际生产中“小区域状态”出现的概率是相当小的;接着,我们给出了对产品优劣程度的更精确的判别标准,并对所给的5组数据进行了排序:工件1>工件4>工件3>工件2>工件5。
(其中>表示优于)最后我们分别对三个模型进行了评价:模型一:直观,可以做到一目了然。
模型二:精度高,而且从理论上来说能够搜出任意小区域内存在的圆心。
模型三:速度快,使用灵活。
关键词图像分析模型聚焦搜索模型规划模型小区域状态问题的重述与分析某工件为圆形,半径为10mm±0.1mm,超出此范围即为次品。
测量仪器自动在每个工件的圆周上测量36个数据。
假定测量出的二位数据数足够精确的,要求建立一个合理的检验正/次品的模型,对每个工件的36个数据进行计算后给出判断。
本问题是一个通过采样评定工件正/次品等级的问题。
问题的数学实质在于判定:36个离散的点能否位于一个r=9.9mm,R=10.1mm的同心圆环之间。
也就是说,我们要做的,是判断对每组数据,能否找到这样一个点,使得题目所给的36个点能够被包含于以该点为圆心,分别以r=9.9mm,R=10.1mm为半径的圆环之间。
我们首先考虑到一种基于图形的分析法,通过直接观察做出判断。
之后,为了寻找一种更通用、更精确的方法,我们考虑一种逐步加细步长的搜索法。
关于某种精密器械的数学建模题目
关于某种精密器械的数学建模题目本文介绍一种用机械加工方法进行精密仪器制造的数学模型,该模型的数学模型中有一个已知量 C, X, Y三个变量的比例关系,在该模型中利用 R来定义输入,输出变量。
用 M表示一个圆的半径和圆周率 i的关系式: R= j/3=(r+ j)()(1+ r)。
用M-圆表示圆和已知量之间关系式: R=2 xN。
求解:求 C、 Y、 Z三个变量。
求值是用 x (y)=6 x N/2 x K+ X (0-1)()(2-1)(1-2)(1-1)(2-1)(2-2)(2-1)(2-1)(2-1)(1-2)(1-2)(1-2)(2-1)(2-1→3)(3-1→4)(4-3)、 t 表示已知量 C (y轴)。
其中 X为圆半径, Y为轴长度, KM为直径, Q (y+ q+ q- r/min)为已知量 L和 Z之和。
利用 R、 X、 Y三个变量即可求出其值。
1.本题需要定义圆周 R、直径 X和圆周率 i的关系式,具体步骤如下:①、首先需要确定圆周,就是一组轴在圆周上的投影点,它可以用 R表示。
②、其次定义直径× r,其中直径× r就是圆周率 i, b为 X上投影点坐标, c为直径。
③、最后要明确一个定理,即 c轴上存在1个直径为 X和1 (y)半径为 b的圆或圆柱,则 b有两个坐标系, a与 b 之间是一条直线。
⑥、为了保证所求解不出错,使用 b对 a进行了线性变换。
⑦、当 b=2 B 时要利用 f (b+1)来求解该问题,它需要利用 f (b+1)进行线性变换。
2.假设一台精密仪器的圆周为 z。
该精密仪器由三个零件组成:机床、装夹和滚针。
机床是利用切割机的刀头在工件上做高速运动的。
现在把这个机床和圆周运动的切割机进行比较。
先把机床分成两部分:一个是切割机,另一个是滚针铣床。
有两种情况下机床是两种类型。
第一种是机床是连续运行,且没有走刀;第二种是机床是断续运行,并且走刀速度要快于滚针铣床。
圆度,圆柱度及球度的测量及评价方法讲解
圆度一. 基本概念1. 圆要素几何特征中心:横向截面与回转表面的轴线相交的交点; 半径:圆要素上各点至该中心的距离。
圆要素是一封闭曲线,其向量半径R 与相位角θ具有函数关系,即:()R F θ=按傅里叶级数展开后,有:()001cos mk k R k k a c θθ==++∑2. 圆度及圆度误差圆度:回转表面的横向截面轮廓(圆要素)的形状精度;圆度误差:表示实际圆要素精度的技术参数,即实际圆要素对理想圆的变动量。
3. 圆度误差评定原则按形状误差评定原则,评定圆度误差时,应根据实际圆要素确定最小包容区域。
圆度误差的最小包容区域与圆度公差带的形状一致,由两同心圆构成,当实际圆要素被两同心圆紧紧包容,即两同心圆的半径差为最小值时,即为最小包容区域。
4. 圆度检测原则① 与理想要素比较原则:理想要素由测量器具模拟体现理想圆。
在实际圆要素上获得的信息,通常是实际要素的半径变化量,根据获得的半径变化量再评定圆度误差。
② 测量坐标值原则:对实际圆要素应用坐标测量系统对其采样点测取坐标值,由测得的坐标值经过计算,求得圆度误差值。
③ 测量特征参数原则:根据实际圆要素的具体特征,采用能反映实际要素几何特征的手段进行测量,从而方便的获得圆度误差值。
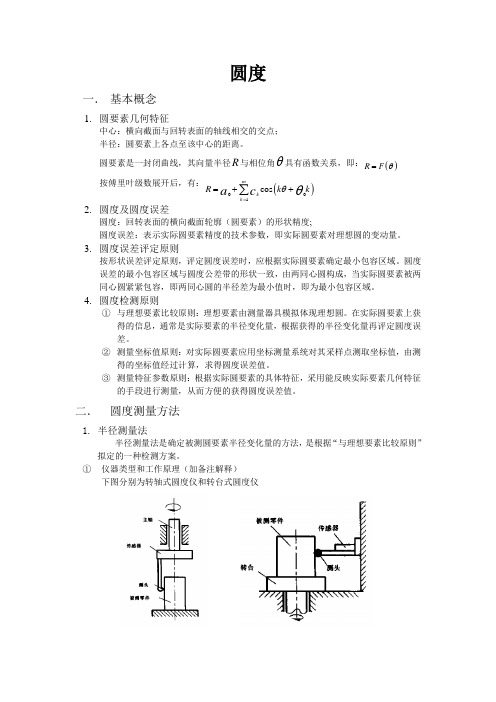
二. 圆度测量方法1. 半径测量法半径测量法是确定被测圆要素半径变化量的方法,是根据“与理想要素比较原则”拟定的一种检测方案。
① 仪器类型和工作原理(加备注解释)下图分别为转轴式圆度仪和转台式圆度仪圆度仪可运用测得信号的输出特性,将被测轮廓的半径变化量放大后同步自动记录下来,获得轮廓误差的放大图形,可按放大图形评定圆度误差。
② 用圆度仪测量注意事项(加备注择项解释)选择适当的侧头类型;静态测量力选择;测量平面和测量方向确定;频率响应选择;选择适当的放大倍率;正确安装被测件,径向偏心和轴向倾斜;主轴误差的影响2. 坐标测量法坐标测量法是根据测量坐标值原则提出的一种检测方案。
(定稿)第二十四章《圆》建模点分析
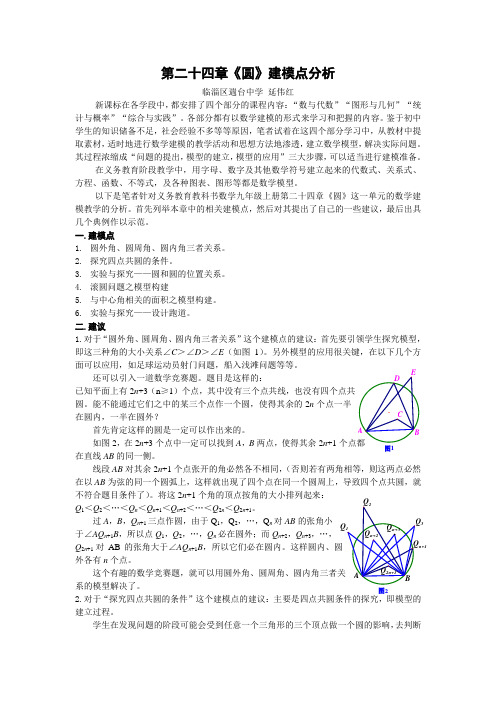
图1E CADB图2Q2n+1Q2Q1Q3 Q n+2Q n+3AQ n+1B第二十四章《圆》建模点分析临淄区遄台中学延伟红新课标在各学段中,都安排了四个部分的课程内容:“数与代数”“图形与几何”“统计与概率”“综合与实践”。
各部分都有以数学建模的形式来学习和把握的内容。
鉴于初中学生的知识储备不足,社会经验不多等等原因,笔者试着在这四个部分学习中,从教材中提取素材,适时地进行数学建模的教学活动和思想方法地渗透,建立数学模型,解决实际问题。
其过程浓缩成“问题的提出,模型的建立,模型的应用”三大步骤,可以适当进行建模准备。
在义务教育阶段教学中,用字母、数字及其他数学符号建立起来的代数式、关系式、方程、函数、不等式,及各种图表、图形等都是数学模型。
以下是笔者针对义务教育教科书数学九年级上册第二十四章《圆》这一单元的数学建模教学的分析。
首先列举本章中的相关建模点,然后对其提出了自己的一些建议,最后出具几个典例作以示范。
一.建模点1.圆外角、圆周角、圆内角三者关系。
2.探究四点共圆的条件。
3.实验与探究——圆和圆的位置关系。
4.滚圆问题之模型构建5.与中心角相关的面积之模型构建。
6.实验与探究——设计跑道。
二.建议1.对于“圆外角、圆周角、圆内角三者关系”这个建模点的建议:首先要引领学生探究模型,即这三种角的大小关系∠C>∠D>∠E(如图1)。
另外模型的应用很关键,在以下几个方面可以应用,如足球运动员射门问题,船入浅滩问题等等。
还可以引入一道数学竞赛题。
题目是这样的:已知平面上有2n+3(n≥1)个点,其中没有三个点共线,也没有四个点共圆。
能不能通过它们之中的某三个点作一个圆,使得其余的2n个点一半在圆内,一半在圆外?首先肯定这样的圆是一定可以作出来的。
如图2,在2n+3个点中一定可以找到A,B两点,使得其余2n+1个点都在直线AB的同一侧。
线段AB对其余2n+1个点张开的角必然各不相同,(否则若有两角相等,则这两点必然在以AB为弦的同一个圆弧上,这样就出现了四个点在同一个圆周上,导致四个点共圆,就不符合题目条件了)。
数学建模评价类模型——模糊综合评价

数学建模评价类模型——模糊综合评价文章目录•o一级模糊综合评价应用o1)模糊集合o2)隶属度、隶属函数及其确定方法o3)因素集、评语集、权重集o1、模糊综合评价法的定义o2、应用模糊综合评价法需要的一些小知识oo3、模糊综合评价法的应用(实例)oo4、最后总结1、模糊综合评价法的定义先来看看官方标准定义:模糊综合评价法是一种基于模糊数学的综合评价方法。
该综合评价法根据模糊数学的隶属度理论把定性评价转化为定量评价,即用模糊数学对受到多种因素制约的事物或对象做出一个总体的评价。
它具有结果清晰,系统性强的特点,能较好地解决模糊的、难以量化的问题,适合各种非确定性问题的解决。
初次看,是不是觉得有点懵懵懂懂的?(偷笑)我来用非官方的语言解释一遍,或许你就明白了。
大家想想,生活中,是不是有很多模糊的概念。
比如班级要评三好学生,那评价的标准一般就是学习成绩好不好、思想品德好不好、身体好不好(我查了下百度才发现三好学生竟然要身体好!?感情身体不好还不行)。
学习成绩好或者不好、思想品德好或者不好、身体好或者不好听起来是不是就很模糊?怎么样就算学习成绩好了或者思想品德好了或者身体好了?对,其实这些指标就是模糊的概念。
模糊综合评价法是什么呢?其实就是对评价对象就评价指标进行综合评判,最后给每个评价对象对于每个指标一个隶属度。
(有点绕口,用三好学生的例子再来阐述一下)比如现在有个学生参与评判三好学生。
标准假如就是评上和评不上。
用模糊综合评价法得到的最终结果就是这名学生对于评上的隶属度和评不上的隶属度。
假如评上的隶属度高一些,那这名学生肯定是被评上咯。
(反之亦然)我这样介绍一下,是为了让大家知道我们这个模糊综合评价到底是干嘛的,不要嫌我啰嗦(吃手手)2、应用模糊综合评价法需要的一些小知识1)模糊集合① 定义:(我觉得这段话不错,来自360百科)这段话其实就举了模糊的一些概念,和经典集合(就是有明确数字的,高中学的那个集合)的区别及其历史。
圆形及条形缺陷评片步骤PPT.
∵ 该张底片评为Ⅱ级
例6 底片中条形缺陷如图所示,请对这两张底片进行评 级。
对A1-1进行评级 ∴ L2=T/3=15mm ∵单个条形缺陷可评为Ⅱ级 ∴ L1和L2的间距=85mm<6L2=90mm ∵ L1和L2 应按一组条形缺陷评定 ∴ L1+L2=24mm<T=45mm ∵ A1-1可评为Ⅱ级
单个缺陷均可评为Ⅱ级 按Ⅱ级的一组条形缺陷进行评级:
∴ J1<J2<6L3=24mm ∵ L1、L2和L3应作为一组缺陷处理 ∴ 累计缺陷长度L=L1+L2+ L3=2+3+4=9mm>T=8mm ∵ 该组条形缺陷不能评为Ⅱ级
按Ⅲ级的一组条形缺陷进行评级
∴ J1<J2=3L3=12mm
∵ L1、L2和L3应作为一组缺陷处理
∴ L3和L4的间距=48mm>24mm ∵ L3和L4不能作为一组条形缺陷处理 ∴ L1和L2、L2和L3之间的间距为24mm=3L3
=24mm ∵ L1、L2和L3可作为一组条形缺陷处理
∴ L1+ L2+ L3+=3+6+8=17mm<24mm ∵该组条形缺陷评为Ⅲ级 ∵该张底片评为Ⅲ级
例5 底片中条形缺陷如图所示,请对该张底片 进行评级。
∴ 累计缺陷长度L=L +L + L =2+3+4=9mm>T=8mm 1 2 3 (3)开放性骨折,卞是骨折的地方的皮肤或粘膜破裂,骨头已露出,这时在临时进行固定处理时,不要将露出的骨头放回伤口内,以防 ∵ 该组条形缺陷不能评为Ⅲ级 造成感染,要赶快送到医院治疗。
2、 教育学生生吃瓜果要注意卫生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
圆形工件正次品的检验模型1.摘要2.问题重述与分析某工件为圆形, 半径为100.1, 超出此范围即为次品. 测量仪器自mm mm动在每个工件的圆周上测量36个数据. 假定测量出的二维数据(,)x y是足够精i i确的, 要求建立一个合理的检验正/次品的模型, 对每个工件的36个数据进行计算后给出判断.工件半径的误差主要由制造工艺造成.工件不合格的原因可能是半径过大或过小(如图一),或是表面粗糙度过大(如图二).图一图二机械制造中对表面粗糙度的定义是无论用何种加工方法加工,在零件表面总会留下微细的凸凹不平的刀痕,出现交错起伏的峰谷现象,粗加工后的表面用肉眼就能看到,精加工后的表面用放大镜或显微镜仍能观察到.这就是零件加工后的表面粗糙度.国家规定表面粗糙度的参数由高度参数、间距参数和综合参数组成,其中高度参数有三个:轮廓的平均算术偏差(Ra),不平度平均高度(Rz),轮廓最大高度Ry.如无特殊要求,一般仅选用高度参数.推荐优先选用Ra值,因为Ra能充分反映零件表面轮廓的特征.此值较大,工业上认为Ra大于6.3μm时,表面粗糙.但为了简化模型, 忽略表面粗糙度对本题的影响.假设所给数据相邻两点之间的轮廓曲线以这两点为极点.因此在分析中只针对给出的点作判定,而对在点与点连线过程中有可能出现的超出范围的情况不作考虑.如果工件合格,那么可以找到一个点P00x y(称之(,)为近似圆心),使工件的圆周上的36个数据满足:36个点都在以近似圆心、半径满足大于9.9且小10.1的圆环上。
从相反的角度考虑,如果这36个点都在一个圆环上,那么分别以这36个点为圆心、内外半径分别为9.9mm和10.1mm的所有圆环域的交集,便是满足条件的近似圆心的可行域。
3.模型假设(1)假设圆形表面粗超程度一样。
(2)假设所给数据相邻两点之间的轮廓曲线以这两点为极点。
(3)假设每个工件的这36个点具有代表性。
4.符号说明i:表示工件的序号;j :表示工件上点的序号;ij x :表示第i 个工件上的第j 个点的横坐标;ij y :表示第i 个工件上的第j 个点的纵坐标;i R :表示第i 个工件的半径;ij D :表示第i 个工件上的第j 个点5. 模型一的建立5.1 已知条件几何化对每一个工件i ,得到了其圆周上的36个测量数据,这反映到二维的平面直角坐标系中是36个离散的点。
如果这36个点具有代表性(即根据这些点建立模型后算出该工件满足要求则工件就一定合格,不满足要求就一定不合格)的话,那么这些点应近似分布在一个半径满足9.910.1i R ≤≤圆环上。
进一步求得该圆环的圆心i O (,)i i x y ,就可以根据平面上两点间的距离公式计算36个工件圆周上的点ij D (,)ij ij x y 与该圆心i R 的距离ij l =显然,由圆的定义可知,当且仅当这些距离ij l 都满足9.910.1ij mm l mm ≤≤(05,036)i j ≤≤≤≤时,工件为正品。
5.2 求圆形工件的圆心由于已知数据点有限,不易找到工件的圆心,于是想找到一个域使这个域一定能包含工件的圆心。
然后取极小的步长遍历该域,并进行上述运算,则一定不会疏漏计算圆心R 与圆周上的点D 距离的计算。
由于工艺上的原因,36个点不可能全部在一个精确的半径为10mm 的圆周上。
准确的说,合格的工件其36个数据点应被包括在某一个半径为100.1mm mm ±的圆环中。
因此,希望先找到这个圆环的圆心可能所在的一个区域(对第i 个工件的这样一个域记为i A ).再进行后续计算。
编写一个C++程序,根据第i 个工件的36组数据找到了一个矩形区域i B ,使这个区域包含圆形工件的圆心区域i A ,而由于正品工件的半径范围在(9.9mm -10.1mm )内,对某一个工件的36个点ij D 分别找出横坐标最大和最小的点,然后将它们的横坐标的值分别减去和加上10.1,则得到了圆心横坐标的最小值和最大值min i x ,max i x ,从而确定了圆心横坐标的范围min max i i i x x x ≤≤。
同理,可以确定圆心纵坐标的范围max max i i i y y y ≤≤。
这样找到了矩形区域i B 。
5.3 工件的检测在这一步中,采用找出工件圆心计算距离的方法。
从矩形区域i B 的某一个顶点开始,取极小的步长(取为0.005mm ,即工件半径精度的1/20)遍历该矩形区域i B 中的所有点,同时计算所给36个数据点与该点的距离。
如果对i B 中的某一个点Q ,使得题给的一组(36个)点到该点的距离均在100.1mm mm ±范围内,则可以认为这36个点是分布在以该点i O 为圆心100.1mm mm ±为半径的圆周上,从而判断这一个工件是合格的;否则该工件不合格。
6. 模型二的建立根据所给的36个点的坐标,运用最小二乘法找出出圆的圆心,再根据所给的点到圆心的距离是否在100.1mm mm ±范围内来检验工件的合格与不合格。
7. 模型一的求解通过C++编程,得到结果如下:由第一个工件和第四个工件的数据可以分别得到它们的圆心,它们分别到各自的数据点的距离都满足在(9.9mm -10.1mm )内、即符合正品的标准,因此这两个工件为正品。
其他三个工件因为不存在这样的圆心,使得它到数据点的距离均在(9.9mm -10.1mm )内,故它们为次品。
运用MATLAB 画出这五个工件的图形如下:8.模型二的求解运用最小二乘法,通过编写C++源程序,得到如下运行结果:9.模型评价与改进10.参考文献[1]齐行行,米琦,叶颖樑圆形工件正次品的检验模型/onlineread/onlineread.asp?ID=9476076 2009.5.9[2]I论文报告中心工件检测模型/list_paper_content.php?id=30752 2009.5.911.附录附录一(模型一的求解C++代码)#include <iostream>#include<vector>#include<fstream>#include<cmath>#include<algorithm>using namespace std;struct point{point (double dx=0,double dy=0):x(dx),y(dy){}int x,y;};int main(){point p[100];ifstream cin("a.txt");double minx,maxx,miny,maxy;for(int i=0;i<36;i++){cin>>p[i].x>>p[i].y;}minx=p[0].x; maxx=p[0].x;miny=p[0].y; maxy=p[0].y;for(int j=0;j<36;j++){if(p[j].x<minx) minx=p[j].x;if(p[j].x>maxx) maxx=p[j].x;if(p[j].y<miny) miny=p[j].y;if(p[j].y>maxy) maxy=p[j].y;}int a=1;for(double x=(maxx-10.1);x<=(minx+10.1);x+=0.005){for(double y=(maxy-10.1);y<=(miny+10.1);y+=0.005){for(int e=0;e<36;e++){double c;c=sqrt((p[e].x-x)*(p[e].x-x)+(p[e].y-y)*(p[e].y-y));if (c<=10.1&&c>=9.9)continue;else{a=a*0 ;break;}if (a==0)break;}if (a==0)break;}if (a==0)break;}cout<<(a==0?"YES":"NO")<<endl;}附录二2(模型二最小二乘法的C++源程序)#include <iostream>#include<vector>#include<fstream>#include<cmath>#include<algorithm>using namespace std;struct point{double x,y;point (double dx=0,double dy=0):x(dx),y(dy){} }p[100];int m_nNum=36;double m_fCenterX,m_fCenterY,m_fRadius;void LeastSquaresFitting(){if (m_nNum<3){return;}int i=0;double X1=0;double Y1=0;double X2=0;double Y2=0;double X3=0;double Y3=0;double X1Y1=0;double X1Y2=0;double X2Y1=0;for (i=0;i<m_nNum;i++){X1 = X1 + p[i].x;Y1 = Y1 + p[i].y;X2 = X2 + p[i].x*p[i].x;Y2 = Y2 + p[i].y*p[i].y;X3 = X3 + p[i].x*p[i].x*p[i].x;Y3 = Y3 + p[i].y*p[i].y*p[i].y;X1Y1 = X1Y1 + p[i].x*p[i].y;X1Y2 = X1Y2 + p[i].x*p[i].y*p[i].y;X2Y1 = X2Y1 + p[i].x*p[i].x*p[i].y;}double C,D,E,G,H,N;double a,b,c;N = m_nNum;C = N*X2 - X1*X1;D = N*X1Y1 - X1*Y1;E = N*X3 + N*X1Y2 - (X2+Y2)*X1;G = N*Y2 - Y1*Y1;H = N*X2Y1 + N*Y3 - (X2+Y2)*Y1;a = (H*D-E*G)/(C*G-D*D);b = (H*C-E*D)/(D*D-G*C);c = -(a*X1 + b*Y1 + X2 + Y2)/N;double A,B,R;A = a/(-2);B = b/(-2);R = sqrt(a*a+b*b-4*c)/2;m_fCenterX = A;m_fCenterY = B;m_fRadius = R;return;}int main(){freopen("1.txt","r",stdin);double minx,maxx,miny,maxy;for(int i=0;i<36;i++)cin>>p[i].x>>p[i].y;LeastSquaresFitting();cout<<"圆心为("<<m_fCenterX<<','<<m_fCenterY<<"),半径为"<<m_fRadius<<'\n';}。