S120 简单抱闸控制
S120 抱闸控制说明

精心整理1简单抱闸控制特点S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。
本文主要介绍简单抱闸控制。
S120简单抱闸控制的特点主要有:?通过顺序控制自动激活?静态P1227(零速P1228)检测监控?强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸?无条件关闭抱闸(p0858=1)?取消“使能速度控制器”信号后的抱闸应用(p0856=0)2抱闸功能描述“简单抱闸控制”专门用于电机抱闸的控制。
当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ传送至电机模块,直接把信号互连到电机模块上并进行监控。
然后电机模块执行动作并激活保持抱闸的输出。
可在SINAMICSS120/S150参数手册(功能图2701,2704)中看到详细的顺序控制框图。
通过参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。
打开抱闸的过程:(1)当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。
完成后,开始建立励磁;(2)励磁完成后,打开抱闸的输出信号为1;(3)此处还可以通过p0855=1强迫释放抱闸命令;(4)打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。
此时电机并不会立即加速,否则会出现溜钩的现象;(5)延迟时间p1216到达之后,电机立即加速,直到稳定状态。
p1216的时间需根据现场情况调节。
关闭抱闸的过程:(1)当控制单元发出OFF命令后,电机速度开始下降;(2)电机实际速度或设定速度小于p1226所设定的值;(3)延迟p1227或p1228时间后,关闭抱闸的输出信号为1;(4)此处还可以通过p0858=1强迫输出关闭抱闸命令;(5)关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。
S120常见故障处理
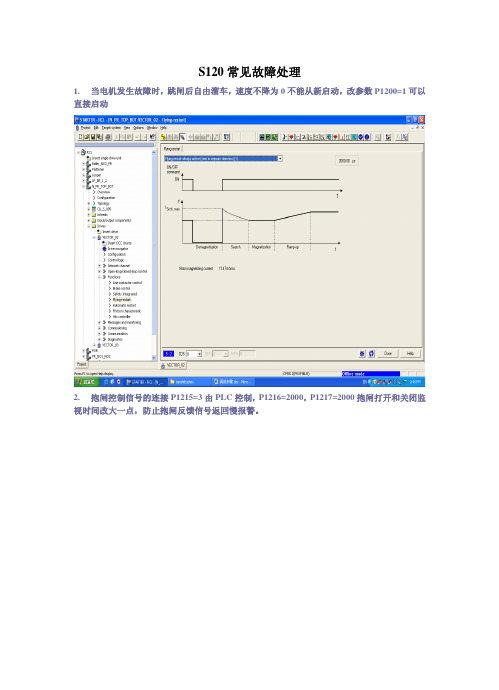
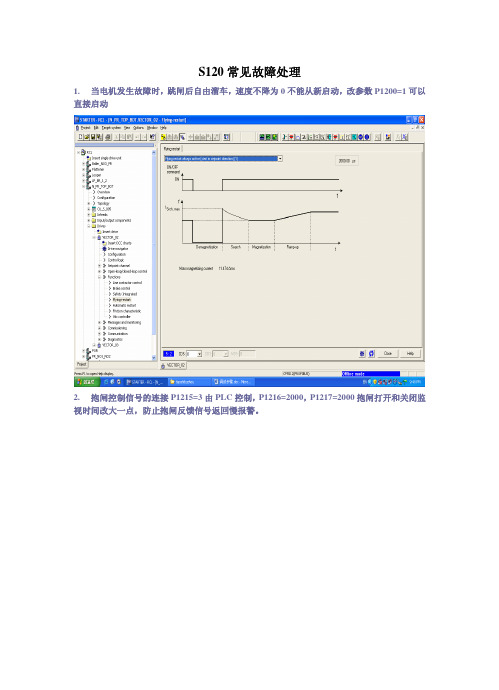
S120常见故障处理1.当电机发生故障时,跳闸后自由溜车,速度不降为0不能从新启动,改参数P1200=1可以直接启动2.抱闸控制信号的连接P1215=3由PLC控制,P1216=2000,P1217=2000抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警。
3.报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值。
改参数:P2175 =2.03%改到1.53% 速度设定监视极限值P2177=10s 改到15s 故障延时时间分两种情况(p1300≥20或p1300<20)p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization.p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode.p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotatingmeasurement and speed controller optimization can be selected.改参数:P1082 =110%改到115% 速度限幅值或者KP增大5.报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报故障。
改参数:P1745=20%改到25% 速度设定监视极限值P2178=10s 改到15s 故障延时时间6.报(A7903)堵转报警,即速度偏差大于设定值经过延时后报故障改参数:P2163 =20%改到30% 速度设定监视极限值P2166=200ms改到400ms 故障延时时间7.急停报F01611(F01600)F30611(F30600),检查急停继电器信号是否正常,并注意端子极性,Motor Module 和Control Unit 各封锁半个桥臂,并且两个信号在相同的延时后(CuP9650,MMP9850)同时收到,不然报故障,如果信号恢复后仍然不能复位,需重新上电。
实现S120主从控制的方案全解

实现S120主从控制的方案全解S120主从控制是指在工业自动化系统中,通过一个主控制器(Master controller)对多个从设备(Slave device)进行统一控制和管理的一种方案。
下面将详细介绍S120主从控制的实现方案。
一、硬件设备方案:1.主控制器:选取一台性能强大的工控机或PLC作为主控制器,用于控制和管理整个系统。
主控制器可以连接各种输入输出设备,如传感器、执行器、显示器等。
2.从设备:每个从设备都配备一个控制器或PLC,用于实现该设备的独立控制和运行。
从设备之间通过通信模块与主控制器进行数据交互。
从设备可以是各种执行器,如电机、驱动器等。
3.通信模块:主控制器和从设备之间需要通过可靠的通信方式进行数据传输和命令下发。
可以选择常用的通信方式,如以太网、RS485等。
通信模块需具备高速传输和可靠性强的特点。
4.IO模块:主控制器和从设备之间的数据交互需要经过输入输出模块。
IO模块负责将输入信号与输出信号进行转换和传输,通常具备多个输入输出端口,可以与各种传感器和执行器进行连接。
5.传感器和执行器:系统中的传感器用于采集各种环境参数和设备状态,执行器用于实现各种动作。
根据实际需求选择合适的传感器和执行器,并与IO模块进行连接。
二、软件方案:1.主控制软件:主控制器上的软件主要负责整个系统的调度和控制。
其功能包括:接收从设备发送的数据,对从设备进行控制和配置,分配任务给从设备,处理异常情况等。
主控制软件需要具备良好的实时性和稳定性。
2.从设备控制软件:每个从设备上的控制软件可以根据具体应用需求编写。
主要功能是接收主控制器发送的命令、读取传感器数据、控制执行器运动等。
从设备控制软件还可以实现一些本地的逻辑判断和控制。
3.数据库系统:为了对系统的运行状态进行数据记录和分析,可以采用数据库系统来存储各种运行数据。
数据库系统可以记录从设备的状态、传感器数据、报警信息、故障记录等,以便于后期的查询和分析。
电气抱闸的控制方法
一、抱闸结构和控制原理制动的方法一般有两类:机械制动和电气制动。
A、机械制动利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
常用的方法:电磁抱闸制动。
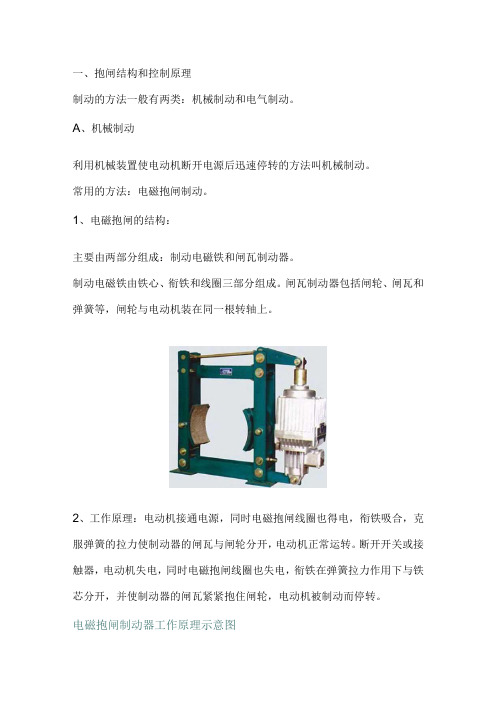
1、电磁抱闸的结构:主要由两部分组成:制动电磁铁和闸瓦制动器。
制动电磁铁由铁心、衔铁和线圈三部分组成。
闸瓦制动器包括闸轮、闸瓦和弹簧等,闸轮与电动机装在同一根转轴上。
2、工作原理:电动机接通电源,同时电磁抱闸线圈也得电,衔铁吸合,克服弹簧的拉力使制动器的闸瓦与闸轮分开,电动机正常运转。
断开开关或接触器,电动机失电,同时电磁抱闸线圈也失电,衔铁在弹簧拉力作用下与铁芯分开,并使制动器的闸瓦紧紧抱住闸轮,电动机被制动而停转。
电磁抱闸制动器工作原理示意图3、电磁抱闸制动的特点机械制动主要采用电磁抱闸、电磁离合器制动,两者都是利用电磁线圈通电后产生磁场,使静铁芯产生足够大的吸力吸合衔铁或动铁芯(电磁离合器的动铁芯被吸合,动、静摩擦片分开),克服弹簧的拉力而满足工作现场的要求。
电磁抱闸是靠闸瓦的摩擦片制动闸轮.电磁离合器是利用动、静摩擦片之间足够大的摩擦力使电动机断电后立即制动。
优点:电磁抱闸制动,制动力强,广泛应用在起重设备上。
它安全可靠,不会因突然断电而发生事故。
缺点:电磁抱闸体积较大,制动器磨损严重,快速制动时会产生振动。
4、电动机抱闸间隙的调整方法停机。
(机械和电气关闭确认、泄压并动力上锁,并悬挂“正在检修”、“严禁启动”警示牌。
)卸下扇叶罩;取下风扇卡簧,卸下扇叶片;检查制动器衬的剩余厚度(制动衬的最小厚度);检查防护盘:如果防护盘边缘已经碰到定位销标记时,必须更换制动器盘;调整制动器的空气间隙:将三个(四个)螺栓拧紧到空气间隙为零,再将螺栓反向拧松角度为120。
,用塞尺检查制动器的间隙(至少检查三个点),应该均匀且符合规定值;不对请重新调整;(注:抱闸的型号不同,其反向拧松的角度、制动器的间隙也不一样)。
手动运行,制动器动作声音清脆、停止位置准确、有效。
S120故障输出和抱闸设置
选择电流 门限值, 推荐设为 20%
选择延时时间
- 39 -
• 抱闸控制位输出设定
选择 DI/DO11 作为抱 闸输出点
- 40 -
- 41 -
. - -
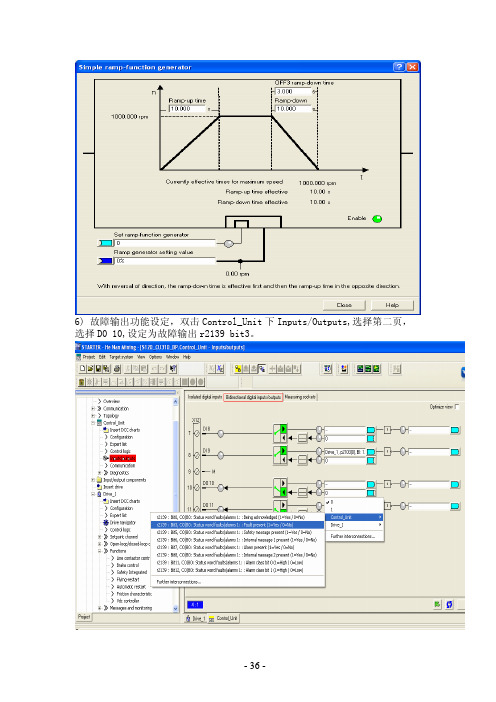
6) 故障输出功能设定,双击 Control_Unit 下 Inputs/Outputs,选择第二页, 选择 D0 10,设定为故障输出 r2139 bit3。
- 36 -
7) 抱闸控制功能设定,双击 Functions 下的 brake control,分别单击 Close brake 和 release brake.
7 ) 闭闸设定, 原则是当转速低于一定值的时候闭闸 • 单击 standstill detection
单击这里
选择实际转速 r63[0]
- 37 -
实际转速 关闸门限值
延时时间
• 选择故障信号接入闭闸信号
选择故障输 出信号
- 38 -
• 开闸设定,原则是当实际电流值高于一定值的时候开闸
选择实际电流 r68
应用探讨——S120抱闸控制探讨

应用探讨——S120抱闸控制探讨随着S120在工控行业的深入和广泛应用,工程师积累了许多关于调试方面的宝贵经验。
在这里我们将一起探讨一下电机抱闸的控制,希望大家踊跃发言,共同探讨应用案例,分享应用经验,一起解析使用中遇到的问题。
我们将从以下几个方面展开讨论:1、在抱闸装置的打开时间P1216内,装置处于STOP2状态,在此状态下,装置运行在什么状态。
STOP2状态应该是打开抱闸命令开始,经过1216时间结束。
关闭抱闸命令开始到脉冲关闭(P1217)。
在STOP2状态中,装置的ON信号存在,脉冲使能r899.11存在,运行使能信号=0,(r899.2),此时装置的电流和转矩(如果设定值通道强制为1,p1152=1)不受控。
---------------------------------------------------------------------------------------------------------------------------------------2、速度设定值使能,默认只有在抱闸打开后才释放,如果需要在抱闸打开前输出转矩如何设置,此处需要考虑STOP2状态。
---------------------------------------------------------------------------------------------------------------------------------------------将p1152改为1后可实现这一功能,可以方便地设置开闸电流门槛的大小。
从实际应用来讲,对于提升类负载,采用“在抱闸打开后再释放速度设定值使能”的方式,当向变频器发出启动信号后,在励磁过程已结束时打开抱闸(开闸电流门槛设置到略高于励磁电流,电机在励磁过程中的励磁电流是大于额定励磁电流的),吊重载时的使用情况也很正常。
如果采用将p1152改为1后,在抱闸打开前就输出转矩的设置,开闸输出转矩的大小要根据实际使用情况逐步调整到合理的值。
西门子S120变频器调试步骤
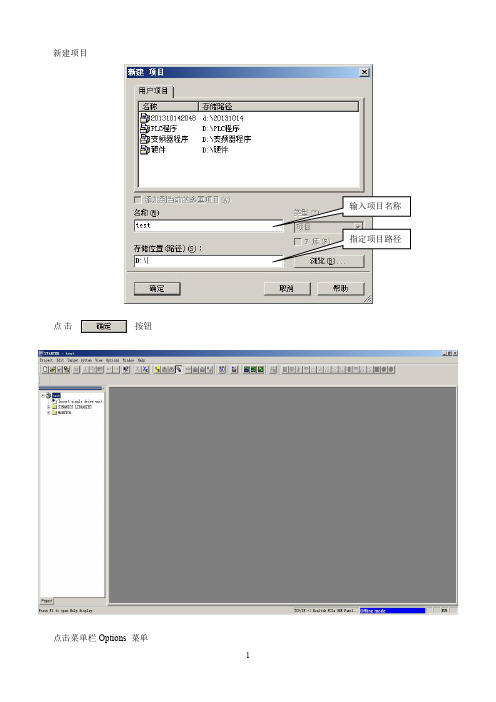
新建项目点击按钮点击菜单栏Options菜单输入项目名称指定项目路径点击设置PG/PC(使用USB编程电缆连接)点击按钮点击按钮,再次点击按钮,完成PG/PC 设置点击设置PG/PC(使用网线连接)点击按钮,完成PG/PC设置选择用于通讯的网卡点击这里点击上图标记(接口信息)按钮,弹出如下所示对话框(如显示?可能是软件版本低)勾选点击按钮点击上图标记(接口信息)按钮,弹出如下所示对话框(如显示?可能是软件版本低)勾选点击按钮待软件左侧显示如上图,点击按钮,点击上图标记(在线)按钮点击这里点击按钮点击上图标记(恢复出厂设置)按钮点击按钮系统会执行Copy Ram to Rom操作点击这里完成后,出现如下界面双击这里双击上图标记(自动组态)按钮点击按钮点击按钮,完成后出现如下界面点击按钮以下进行参数设置:注意这里第一步:右击这里第二步:单击这里单击OK 按钮第一步:双击这里第二步:选择组0的扫描时间注意:如果没有整流模块时,变频器启动信号直接连接到电机模块的P840;并将r20047连接到p852。
有整流模块时,也将r20047连接到p852。
选择组0第一步:双击这里正向信号连接或门输入端0反向信号连接或门输入端1故障复位变频器启动注意:这两个参数一定在做完电机辨识以后再设定禁止反向运行禁止正向运行第一步:单击这里变频运行注意箭头方向变频故障抱闸输出注意:抱闸输出要在下面设置好抱闸条件以后,才能设置,否则找不到参数r1229.1注意:TB30的设置与TM31的设置类似,只是TB30集成在CU 上,并且TB30只能选择-10V~10V 信号,但是可以在Scaling 里更改其适用范围。
第一步:双击这里选择就绪第一步:双击这里第二步:设置速度给定输入类型第三步:设置模拟量死区第四步:点击这里并根据实际情况设定最后点击这里设置信号输出类型设置信号输出类型频率电流点击这里并根据实际情况设定点击这里并根据实际情况设定第一步:双击这里第二步:单击这里矢量控制最后点击这里带编码器直接点击这里直接点击这里应用在重载场合最后点击这里普通旋转电机最后点击这里输入正确的电机参数最后点击这里直接点击这里直接点击这里选择电机辨识然后点击这里选择抱闸方式选择选择外部抱闸然后点击这里点击这里进行编码器设置编码器设置完成后点击这里编码器脉冲无零位标记四线AB 相编码器最后点击这里八线ABZ 反编码器注意电压静态和动态辨识最后点击这里直接点击这里检查与实际是否相符设置加减速时间最后点击这里直接点击这里双击这里选择就绪编码器故障导致无编码器运行,继续运行,报警或门输出端给变频器使能快速励磁双击这里点击这里设置关抱闸条件点击这里设置开抱闸条件第一步:点击这里第二步:设置关抱闸转速第三步:点击这里第四步:点击这里设置电流百分比设置开抱闸条件(电流)最后点击这里双击这里再点击这里反转信号上文提到的禁止正反向信号参数设置完成后,开始电机的静态动态辨识静态辨识:单击按钮1,变频器启动,电机不会转动,等待变频器自动停止后单击按钮0;动态辨识:静态辨识结束后单击按钮1,电机转动,等待变频器自动停止。
西门子S120书本型伺服驱动器如何使用STARTER进行快速调试
西门子S120书本型伺服驱动器如何使用STARTER进行快速调试使用 STARTER 进行调试(示例)下表中举例说明了使用调试工具 STARTER 进行调试的步骤。
列表: 使用调试工具 STARTER 进行调试的步骤(示例)做什么?如何做?注释1.创建新项目1.调用菜单“Project > New...”。
2.在对话框“New Project” 中输入项目名称。
3.点击“OK”。
-2.自动配置1.调用菜单“Project > Connect to selected target device”。
2.因为现在项目中无任何设备,调试工具 STARTER 提供查找可访问的接口。
3.点击“OK”。
4.勾选一台可访问的驱动设备。
5.点击“Accept”。
6.该驱动对象被传送到项目窗口中。
7.重新调用菜单“Project” > “Connect to selected target device”。
8.现在已和驱动设备在线连接。
9.双击“Automatic configuration”。
点击“Configuration”。
10.在自动调试期间,向导会为您提供可以选择的驱动对象类型。
所有组件都选择缺省设置“SERVO”。
11.点击“Create”。
12.在自动配置结束后,会提供转至离线或保持在线选项。
选择“GO OFFLINE ”。
-3.配置电源模块1.双击项目树形图中的“Infeeds”2.双击创建的电源模块3.点击黄色按钮“Wizard...”4.根据 3.2 检查自动设置并输入附加数据(如设备标识符等)。
-提示:由于在出厂设置中 p7826 = 1,因此在首次启动所配置的 DRIVE-CLiQ 组件时,固件会自动升级到存储卡上的固件版本。
该过程会持续几分钟。
与此同时该组件上 READY LED 以绿色/红色闪烁,控制单元上的 LED 以橙色闪烁(0.5 Hz)。
在所有升级结束后,控制单元上的READY LED 以橙色(2 Hz)闪烁,完成更新的组件的 READY LED 以绿色/红色闪烁(2 Hz)。
西门子变频器S120安全功能介绍

西门子变频器S120安全功能介绍
西门子变频器S120的控制单元分为单轴驱动控制单元,控制单元适配器等多种类型,用户在使用西门子变频器S120时,需要注意它的安全功能。
本文下面就来介绍一下西门子变频器S120的安全功能,供用户在选择使用及调试时进行参考。
西门子变频器SINAMICS S120集成了标准的安全功能并可以通过特定的授权,实现更多的安全功能,这些功能如下:
1. 标准的安全功能
(1)STO:即安全扭矩关断功能,确保了电机不再输出扭矩,防止了一些意外的启动;
(2)SS1:即安全停止功能,该功能使电机快速停止,一旦进入静止状态,激活STO功能;
(3)SBC:即安全抱闸功能,用于安全控制一个设备抱闸;
2. 可添加授权的安全功能
(1)SS2:即安全停车功能2,可以使得电机快速停止,一旦进入静止状态,就对静止的位置进行监控;
(2)SOS:即安全操作停止,监控安全停止的位置,并且不取消驱动的闭环控制;
(3)SDI:即安全方向监控,确保驱动器始终在一个选定的方向运行;
(4)SSM:即安全速度监控,当驱动在某一个设定的速度以下运行
时,会给出一个信号置位;
(5)SLP:即安全限位功能,监控一个轴是否在一个预设的路径范围内运行。
西门子变频器SINAMICS S120系列为用户提供了多种安全功能,其中有自带的标准安全功能,也有通过授权后可以扩展的安全功能。
在使用过程中,用户可以根据实际需求,选择相应的安全功能,从而确保自动化驱动控制系统安全稳定的运行。
S120常见故障处理
S120常见故障处理1.当电机发生故障时,跳闸后自由溜车,速度不降为0不能从新启动,改参数P1200=1可以直接启动2.抱闸控制信号的连接P1215=3由PLC控制,P1216=2000,P1217=2000抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警。
3.报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值。
改参数:P2175 =2.03%改到1.53% 速度设定监视极限值P2177=10s 改到15s 故障延时时间分两种情况(p1300≥20或p1300<20)p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization.p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode.p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotatingmeasurement and speed controller optimization can be selected.改参数:P1082 =110%改到115% 速度限幅值或者KP增大5.报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报故障。
改参数:P1745=20%改到25% 速度设定监视极限值P2178=10s 改到15s 故障延时时间6.报(A7903)堵转报警,即速度偏差大于设定值经过延时后报故障改参数:P2163 =20%改到30% 速度设定监视极限值P2166=200ms改到400ms 故障延时时间7.急停报F01611(F01600)F30611(F30600),检查急停继电器信号是否正常,并注意端子极性,Motor Module 和Control Unit 各封锁半个桥臂,并且两个信号在相同的延时后(CuP9650,MMP9850)同时收到,不然报故障,如果信号恢复后仍然不能复位,需重新上电。
S120的抱闸控制

S120的抱闸控制抱闸控制优先级排列:1.参数p12152.二进制互联参数p1219[0...3] 和p08553.静止状态检测逻辑的控制指令4.通过模拟量互联,使用阈值判断的控制指令1 激活扩展抱闸功能(Extended brake control)1.1使用STARTER激活首先,离线状态下进行驱动轴的配置(Configuration),如图所示第二步,在右侧界面选择配置驱动数据组(Configure DDS),如图所示:第三步,进入驱动配置界面,在抱闸配置界面中激活扩展抱闸控制(Extended brake control);第四步,然后保存,在线后下装(Download CPU / drive unit to target device);第五步,确认已激活扩展抱闸功能,查看驱动轴参数r108.14,如图所示:1.2使用BOP20激活扩展抱闸功能第一步,修改CU参数p0009=2,第二步,修改CU参数p0108[1].14=1(假定p0108[1]对应所需的驱动轴),第三步,修改CU参数p0009=0,装置激活扩展抱闸功能,第四步,检查驱动轴参数r0108.14=1 。
1.3 注意事项A.没有修改出厂设置时,扩展抱闸控制作为“简单抱闸控制”工作。
B.如果书本型电机模块和带“Safe Brake Relay” 的模块型功率单元检测到已连接抱闸(BR+,BR-之间有阻值),则在自动配置时,简单抱闸控制自动激活(p1215 = 1) ,并自动激活抱闸状态诊断功能(p1278=0)。
C.在不具备内部抱闸控制时,可以由参数(p1215=3) 激活控制。
D.只有启用“带诊断分析的抱闸控制”功能,即p1278=0,才能使用安全功能“Safe Brake Control”。
E.只有书本型电机模块和带“Safe Brake Relay” 的模块型功率单元才可以激活抱闸控制监控(p1278=0)。
打开抱闸界面抱闸界面参数设置:对于参数p1215,可以有以下几种设置方式:p1215=0,不使用抱闸功能p1215=1,基本抱闸控制模块集成的抱闸p1215=2,电机抱闸一直打开p1215=3,外部抱闸控制装置,使用BICO连接p1216:抱闸打开动作时间;p1217:抱闸关闭动作时间;p1222:抱闸已闭合反馈信号;p1223:抱闸已打开反馈信号;一般地,关闭抱闸和释放抱闸命令使用一个连接器即可,推荐使用连接器r1229.1。
S120变频器在转炉倾动中的主从控制方案比较
总第214期2013年第10期HEBEI M ET ALLU RGYT otal No.2142013,Number 10收稿日期:2013-06-25作者简介:郭进涛(1973-),男,工程师,1997年毕业于河北科技大学机电一体化专业,现在石家庄华海冶金科技公司工作,E -mail :gjt1973@sina.comS120变频器在转炉倾动中的主从控制方案比较郭进涛,薛辉(石家庄华海冶金科技公司,河北石家庄050000)摘要:介绍了转炉倾动过程中的负载特性、西门子S120变频器的特点、变频传动配置及控制方案,给出了在转炉倾动控制中应用S120变频器实现主从控制的两种方案和实现方法,并进行了比较。
关键词:S120变频器;转炉;倾动;主从控制;方案;比较中图分类号:TF341.1文献标识码:B文章编号:1006-5008(2013)10-0066-02MASTER-SLAVECONTROL PLANS FORS120FREQUENCY TRANSFORMERIN CONVERTERTILTINGGuo Jintao ,Xue Hui(Shijiazhuang Huahai Metallurgical Science and Technology Company ,Shijiazhuang ,Hebei ,050000)Abstract :It is introduced the load property in converter tilting ,characteristics of Siemens S120frequency transformer ,drive configuration and control plan.Two plans and their practice methods for S120to realize master -slave control are presented and compared.Key Words :S120frequency transformer ;converter ;tilting ;master -slave control ;plan ;compare1引言S120变频器是西门子公司推出的全新一代驱动产品,可用于复杂的高端应用,是6SE70变频器的升级换代产品,功能比6SE70强大,应用比6SE70灵活。
S120 调试指导及应用
SINAMICS S120调试指导1调试准备S120变频器支持连接3AC 690V的交流进线电压,最高直流母线电压会大于1000V,远远超出了安全电压范围。
如果安装或操作不当难免会引起人身和设备事故。
特别是针对装机装柜和柜机类型的大容量设备,在设备安装和调试过程中必须严格遵循相关的操作规范,下列规范可以作为您安装调试过程中的一个参考:1.机械安装检查∙安装前检查运输指示器,包括震动和倾斜指示;∙检查重心标识;∙检查安装环境是否满足相应设备手册规范;∙检查接地体载流能力是否满足规范;∙针对柜机结构,当设备安放于最终安装位置后拆除顶部吊装(M90选件);∙在设备最终安装之前,正确拆除运输用的木制托盘;∙保证柜顶距天花板的最小高度,继而保证冷却风道畅通和冷却风量;∙柜体底部必须固定牢靠;∙由于运输原因单独交付的下列选件需要现场安装:① IP21防护等级的遮蓬(M21选件)② IP23/43/54防护等级的防护罩或滤网∙如果柜体底部位于非实体结构之上,需采取必要的防震措施;∙如带L37选件,其手柄需正确安装;∙对于M26选件,柜体设备为右侧封闭;对于M27选件,柜体设备为左侧封闭;∙调试前检查柜内元件的震动松动情况;∙确保柜门打开方向上的逃生路线顺畅,遵循相关的安装规范。
2.电气安装检查∙为减轻张力,电缆需要在C型安装母线上夹紧安装;∙当应用EMC屏蔽电缆时,电机接线盒端要大面积有效接地,柜内要安全的连接屏蔽母线;∙关于PE母线,各个柜间的PE母线要有效连接,整个系统要建立有效接地;∙关于直流母线,各设备间的直流母线要建立可靠连接,严禁将操作工具放于母排上;∙关于辅助供电系统,各柜机间要建立可靠连接,并确保电压连接正确;∙如果单个柜机设备独立发货运输,现场需要按照电路图进行正确的柜间电气连接;∙在无线电干扰抑制滤波器的电容接地连接片处贴有黄色警告标签:对于接地电网(TN/TT),保留连接片,拆除黄标签;对于不接地电网(IT),拆除连接片和黄标签。
S120调试说明
1 配置 (2)1.1 自动配置过程 (2)1.2 手动配置过程 (5)2.调试 (17)2.1获取控制权 (18)2.2 原点设定 (20)3 限位 (23)3.1 软极限设计 (23)3.2硬极限设定 (24)1 配置1.1 自动配置过程1.上载完成后点击自动配置进入自动配置过程,如图自动配置2.进入自动配置过程后会弹出一系列对话框,按照如下过程选择1)点击Configure开始配置点击Configure2)选中保存到ROM,点击OK选中点击OK点击OFFLINE3)下拉菜单选择Servo 点击Create开始下拉选择Servo点击开始配1.2 手动配置过程自动配置执行完成后需要手动配置一些参数,配置过程如下1)双击SERVO_02进入手动配置画面双击SERVO_022)点击Configure DDS 开始配置点击Configure DDS 3)激活基本定位后,点击下一步激活基本定位点击Next 4)选择电源模块选择电源模点击Next5)选择控制器选择控制器点击Next6)选择电机点击Next 7)选择抱闸选择使用抱闸点击Next 8)选择编码器点击Next 9)选择检测系统点击Next 10)选择机械比选择机械比点击Next11)选择报文下拉选择报文点击Next 12)配置结果预览确认无误后点击完成点击Finish* 完成手动配置后,需要保存编译并将程序下载到控制器中,下载完成后需要重启控制器* 从第3步开始为手动配置过程,其中除第3步和第11步需要手动选择外,其他过程均已在自动配置过程中完成,直接点击Next就可以2.调试点击控制面板进入手动调试界2.1获取控制权1)点击1会弹出对话框,输入时间后点击2,即可获取控制权1输入时间22)选择控制方式为基本定位控制3) 手动控制使能,打开抱闸4) 输入点动速度,启动电机* 输入速度需要带有方向,如600或者-6005) 点动控制,电机停止伺服使能打开抱闸启动电机输入速度点动控制电机停止2.2 原点设定1)点击Homing进入原点设定界面进入原点设定界面2)点击画面中的方框设计参考点3)输入参考点位置值,点击接收后关闭画面4)保存数据输入参考值一般输入0 接收参考值4.1)进入Expert List画面4.2)将P971置1,待其重新显示0时表示数据已存储完毕3限位3.1 软极限设计设定软极限时需要将P2582置1,激活软限位功能。
S120
斜坡时间的提示及技巧?SINAMICS G & SINAMICS SFAQ July 2013Service & SupportQuestion以下链接为西门子工业在线支持入口。
(/terms_of_use) 关于通用术语应用说明。
以下链接直接进入本文档的下载页面:/WW/view/en/76877897警告本文中用到的功能和方案限用于本次自动操作任务的实现。
当将设备连接到车间的其他部分,企业网络,或者互联网上时,请根据实际情况和相关工业安全要求考虑更多因素,采取相应的保护措施。
更多信息请参看文档ID50203404。
/WW/view/en/50203404问题关于斜坡时间问题的提示及技巧。
答案关于此问题,此文档的内容提供了详细的解答Ramp timings hints and tips1 介绍目录1介绍 (3)2问题解决办法 (5)2.1扩容变频器 (5)2.2为什么变频器没有跟随实际给定? (5)2.3为什么发生过电流故障F7801? (6)2.4为什么发生过速度故障F7901? (6)2.5电机降速过程机械抱闸时祛磁吗? (7)2.6斜坡时间的关键参数 (8)1 介绍Ramp timings hints and tips1 介绍斜坡时间控制着电机从启动升至所需转速的时间(上升斜坡),或电机减速至停止的时间(下降斜坡)。
默认的上升斜坡及下降斜坡时间为典型值10秒,但此时间值可能不适合用户的特殊应用。
斜坡时间可使用如下参数调整:∙ P1120: 斜坡功能发生器斜坡上升时间∙ P1121: 斜坡功能发生器斜坡下降时间如果斜坡时间被设置太短,变频器会触发过流或过压故障,从而保护系统。
如果斜坡上升时间太短,会产生过流情况。
如果斜坡下降时间太短,会产生过压情况。
如果变频器被频繁的强制过流或过压,那么最终可能导致变频器损坏。
注意当使用报文900, 要将安全输入设置成“enable”,从而阻止配置故障(F1653)。
S120常见故障处理
S120常见故障处理1.当电机发生故障时,跳闸后自由溜车,速度不降为0不能从新启动,改参数P1200=1可以直接启动2.抱闸控制信号的连接P1215=3由PLC控制,P1216=2000,P1217=2000抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警。
3.报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值。
改参数:P2175 =2.03%改到1.53% 速度设定监视极限值P2177=10s 改到15s 故障延时时间分两种情况(p1300≥20或p1300<20)p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization.p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode.p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotatingmeasurement and speed controller optimization can be selected.改参数:P1082 =110%改到115% 速度限幅值或者KP增大5.报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报故障。
改参数:P1745=20%改到25% 速度设定监视极限值P2178=10s 改到15s 故障延时时间6.报(A7903)堵转报警,即速度偏差大于设定值经过延时后报故障改参数:P2163 =20%改到30% 速度设定监视极限值P2166=200ms改到400ms 故障延时时间7.急停报F01611(F01600)F30611(F30600),检查急停继电器信号是否正常,并注意端子极性,Motor Module 和Control Unit 各封锁半个桥臂,并且两个信号在相同的延时后(CuP9650,MMP9850)同时收到,不然报故障,如果信号恢复后仍然不能复位,需重新上电。
S120常用参数
S120常用参数S120常用控制参数1.访问权限及出厂复位P003 BOP访问级别 3:专家4:维修P010 驱动调试参数筛选 0:就绪1:快速调试2:功率单元调试3:电机调试(电机模块)4:编码器调试(电机模块)5:工艺应用/单元15:数据组30:参数复位P970 驱动参数复位 0:当前无效1:复位参数5:复位Safety参数(电机模块) 100:复位BICO参数2.电机数据组P3.编码器P4.实际信号及控制字和状态字P015 宏文件选择r019 BOP控制字状态r020 转速设定值 rpmr021 转速实际值 rpmr022 转速实际值 rpmr024 滤波的输出频率 Hzr025 已滤波的输出电压 Vr026 已滤波的直流母线电压 Vr027 已滤波的电流实际值 Ar031 已滤波的转矩实际值 Nmr035 端子上输入的温度℃(BLM)/电机温度(电机模块)r037 功率单元温度℃/控制单元温度℃r046 缺少的使能信号r050 命令数据组有效位00:CDS 0 有效位01:CDS 1 有效r051 驱动数据组有效位00:DDS 0 有效位01:DDS 1 有效状态字1 位00:接通就绪 =位01:运行就绪 =位02:运行使能 =位03:故障有效 =位04:OFF2有效 =位05:OFF3有效 =位06:接通禁止有效 =位07:警告有效 =位08:设定值/实际值偏差 =位09:PLC控制请求 =位10:达到或超过n比较值 =位11:达到转矩极限 =(取反)位12:电机抱闸打开 =位13:电机超温报警 =(取反)位14:电机正向旋转 =位15:变频器过载警告 =(取反)控制字1 位00:ON/OFF1 = =P840位01:OFF2 = = P844/ P845位02:OFF3 = = P848/ P849位03:使能运行 = = P852位04:使能斜坡函数发生器 = = P1140位05:继续斜坡函数发生器 = = P1141位06:使能转速设定值 = = P1142位07:故障复位 = = P2103/P2104/P2105位08:JOG 0 = = P1055位09:JOG 1 = = P1056位10:通过PLC控制 = = P854位11:设定值取反 = = P1113位12:位13:MOP 上升 = = P1035位14:MOP 下降 = = P1036位15:P840 ON/OFF1命令P844/ P845 OFF2P848/ P849 OFF3P852 使能P854 PLC控制P1140 使能斜坡函数发生器P1141 继续斜坡函数发生器P1142 使能转速设定值P1113 设定值取反(反向)P2103/P2104/P2105 故障复位r055 附加控制字r056 闭环控制状态字r060 未滤波的转速设定值rpmr061 未滤波的转速实际值rpmr068 直流母线的直流电流/电机实际电流绝对值r069 相电流实际值(电机模块)r070 直流母线电压5.通讯P918 Profibus通讯地址P922 Profibus报文格式选择 1:标准报文1,PZD2-220:标准报文20,PZD2-6350:西门子报文350,PZD4-4352:西门子报文352,PZD6-6353:西门子报文353,PZD2-2,PKW4-4 354:西门子报文354,PZD6-6,PKW4-4 999:自由报文6.其他设定源P1000 主给定设定来源 0:无主设定值1:电动电位计2:模拟设定值3:转速固定设定值6:现场总线P1070 主给定 r755:模拟设定值r1024:固定设定值 r1050:电动电位计P1075 附加给定 r755:模拟设定值r1024:固定设定值r1050:电动电位计:P1055 点动命令位0 (JOG1的信号源)P1056 点动命令位1 (JOG2的信号源)P1058 JOG1 转速设定值P1059 JOG2 转速设定值P1035 电动电位计MOP正向升速命令源P1036 电动电位计MOP反向降速命令源P1037 电动电位计最大转速P1038 电动电位计最小转速P1039 电动电位计MOP取反P1040 电动电位计MOP初始值rpmP1080 最小速度rpmP1082 最大速度rpmP1083 正向速度极限rpmP1086 反向速度极限rpmP1085 正向速度极限信号源P1088 反向速度极限信号源P1110 禁止负方向P1111 禁止正方向P1113 设定值取反信号源P1120 RFG加速时间P1121 RFG减速时间P1135 OFF3下降时间P1503 转矩设定值信号源P1520 转矩上限P1521 转矩下限P1522 转矩上限信号源P1523 转矩下限信号源P855 强制打开抱闸P856 强制闭合抱闸P810 命令数据组选择CDS位0P811 命令数据组选择CDS位1P820 驱动数据组选择CDS位0P821 驱动数据组选择CDS位1P700 命令源选择 0:没有宏2:端子6:现场总线170:JOG1181:2线类型2181:2线类型3181:3线类型1181:3线类型2P2106/P2107/P2108 外部故障1/ 外部故障2/ 外部故障3 P2112/P2116/P2117 外部报警1/ 外部报警2/ 外部报警3 P640 电流极限P1300 开环/闭环方式P1755 无编码器运行时速度7.数字及模拟量输入输出r720 CU上数字输入输出数量r721 CU上数字输入实际值r722 CU上数字输入状态P730 数字输出DO 0的信号源选择P731 数字输出DO 1的信号源选择P732 数字输出DO 2的信号源选择r747 数字输出状态P748 数字输出取反r751 模拟输入状态P756 模拟输入类型选择 0:单极电压输入(0 (10V)1:监控单极电压输入(+2V (10V)2:单级电流输入(0mA……+20 mA)3:监控单级电流输入(+4mA......+20 mA)4:双击电压输入(-10V (10V)8:未连接传感器P771 模拟输出信号源P772 模拟输出当前输出值%P776 模拟输出类型 0:电流输出(0mA……+20 mA)1:电压输处(0 (10V)2:电流输出(+4mA……+20 mA)。
s120抱闸控制说明
S120抱闸控制说明(总5页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除1 简单抱闸控制特点S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。
本文主要介绍简单抱闸控制。
S120 简单抱闸控制的特点主要有:• 通过顺序控制自动激活• 静态P1227(零速P1228)检测监控• 强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸• 无条件关闭抱闸(p0858 = 1)• 取消“使能速度控制器”信号后的抱闸应用(p0856 = 0)2抱闸功能描述“简单抱闸控制”专门用于电机抱闸的控制。
当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。
然后电机模块执行动作并激活保持抱闸的输出。
可在SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。
通过参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。
打开抱闸的过程:(1) 当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。
完成后,开始建立励磁;(2) 励磁完成后,打开抱闸的输出信号为1;(3) 此处还可以通过p0855=1强迫释放抱闸命令;(4) 打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。
此时电机并不会立即加速,否则会出现溜钩的现象;(5) 延迟时间p1216到达之后,电机立即加速,直到稳定状态。
p1216的时间需根据现场情况调节。
关闭抱闸的过程:(1) 当控制单元发出OFF命令后,电机速度开始下降;(2) 电机实际速度或设定速度小于p1226所设定的值;(3) 延迟p1227或p1228时间后,关闭抱闸的输出信号为1;(4) 此处还可以通过p0858 = 1强迫输出关闭抱闸命令;(5) 关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。
S120(CU310-2PM240-2)驱动第三方多极永磁同步电机案例分享

S120(CU310-2PM240-2)驱动第三方多极永磁同步电机案例分享S120驱动第三方多极永磁同步众所周知,伺服电机的驱动,一般都用自身同一品牌的驱动器进行控制,电机参数性能匹配度会很好,如果用第三方驱动器进行控制,可能会有很多麻烦;随着近些年永磁同步电机的发展,永磁同步电机的驱动控制,同样面临这样问题,而西门子S120驱动器,以其强大的控制功能、开放的参数体系,能够方便地驱动第三方永磁同步电机,充分地发挥永磁同步电机固有性能,实现传动与控制的完美结合。
永磁同步电机简介永磁同步电机转子采用永磁体,目前主要以钕铁硼作为永磁材料,由于永磁同步电机转子采用了永磁材料,进而简化了电机结构,去掉了转子的铜耗,提高了电机效率。
定子保持传统三相异步电机的结构。
<永磁同步电机结构原理图>永磁同步电机主要特点1.永磁同步电机,转子为永磁体,结构简单,不同于异步电机转子的笼形结构。
2.永磁同步电机,无需外部励磁,转子自身存在磁场。
3.永磁同步电机,能效等级高,更利于节约电能。
4.永磁同步电机,速度、转矩控制更加精确。
5.永磁同步电机,多极结构,可以实现低速大扭矩输出,直接驱动机械负载,省了减速箱。
S120驱动第三方永磁同步曳引机应用案例杭州智泊科技有限公司,主要从事立体车库电控部分的系统集成;在江西南昌的一个智能立体停车库项目中,采用西门子的S120驱动器以及第三方多极永磁同步曳引机;此次用户将同步曳引机用于立体车库,是客户首次创新应用方案,项目顺利完工并验收,得益于西门子S120开放的软件功能,精准的自学习优化功能,实现驱动第三方永磁同步电机,最终实现车盘升降平稳,停层精度高,使得车辆能够安全、舒适进出车库,用户体验非常好。
<现场同步曳引机及电控柜照片>驱动系统配置及方案优势同步驱动系统由CU310-2控制单元和PM240-2功率单元构成,这种配置是一个性价比非常高的方案。
•PM240-2功率单元基于SINAMICS 平台研发,与S120系统完全兼容;•PM240-2内置制动单元,只需要外配制动电阻,即可实现车盘下移时的能量消耗;•CU310-2是S120单轴传动的控制单元,软件资源丰富,参数开放,方便与第三方电机匹配;•CU310-2控制单元,集成各种优化算法,比如电流环、速度环等等,更适合高效发挥电机的性能。
西门子S120变频器抱闸控制探讨

西门子S120变频器抱闸控制探讨随着S120在工控行业的深入和广泛应用,工程师积累了许多关于调试方面的宝贵经验。
在这里我们将一起探讨一下电机抱闸的控制,希望大家踊跃发言,共同探讨应用案例,分享应用经验,一起解析使用中遇到的问题。
我们将从以下几个方面展开讨论:1、在抱闸装置的打开时间P1216内,装置处于STOP2状态,在此状态下,装置运行在什么状态。
STOP2状态应该是打开抱闸命令开始,经过1216时间结束。
关闭抱闸命令开始到脉冲关闭(P1217)。
在STOP2状态中,装置的ON信号存在,脉冲使能r899.11存在,运行使能信号=0,(r899.2),此时装置的电流和转矩(如果设定值通道强制为1,p1152=1)不受控。
---------------------------------------------------------------------------------------------------------------------------------------2、速度设定值使能,默认只有在抱闸打开后才释放,如果需要在抱闸打开前输出转矩如何设置,此处需要考虑STOP2状态。
---------------------------------------------------------------------------------------------------------------------------------------------将p1152改为1后可实现这一功能,可以方便地设置开闸电流门槛的大小。
从实际应用来讲,对于提升类负载,采用“在抱闸打开后再释放速度设定值使能”的方式,当向变频器发出启动信号后,在励磁过程已结束时打开抱闸(开闸电流门槛设置到略高于励磁电流,电机在励磁过程中的励磁电流是大于额定励磁电流的),吊重载时的使用情况也很正常。
如果采用将p1152改为1后,在抱闸打开前就输出转矩的设置,开闸输出转矩的大小要根据实际使用情况逐步调整到合理的值。