直流电动机开环调速MATLAB系统仿真
实验三开环直流调速系统Matlab仿真

实验三开环直流调速系统Matlab仿真实训三晶闸管开环直流调速系统的 MATLAB 仿真实训一、实验实训目的1.学习并掌握晶闸管开环直流调速系统模型建立及模型参数设置的方法和步骤。
2.熟悉并掌握系统仿真参数设置的方法和步骤。
3.学会利用 MA TLAB 软件对系统进行稳态与动态计算与仿真。
4.巩固并加深对晶闸管开环直流调速系统理论知识的理解。
二、实验实训原理及知识准备1.晶闸管开环直流调速系统的原理图如图3-3-1 所示。
图 3-1 晶闸管开环直流调速系统原理图2.晶闸管开环直流调速系统的直流电动机电枢电流、电磁转矩与转速之间的关系。
3.复习实验实训指导书中MA TLAB 基本操作和MA TLAB/Simulink/Power System工具箱内容。
4.预习实验实训指导书中实验实训二,并写好预习报告。
5.画出晶闸管开环直流调速系统的动态结构图。
三、实验实训内容及步骤直流调速系统的仿真有两种方法,一是根据系统的动态结构图进行仿真,二是用Power System的相关模块仿真,下面分别对两种方法进行介绍。
方法一:使用 Simulink 中的 Power System模块对直流调速系统进行仿真1.建立系统的仿真模型和模型参数的设置(1)建立一个仿真模型的新文件。
在 MA TLAB 的菜单栏上点击工具栏上的simulink工具,选择File→New→Model,新建一个simulink文件,绘制电路的仿真模型如图 3-3-1。
3-3-1(2)按图 3-3-1 要求提取电路元器件模块。
在仿真模型窗口的菜单上点击图标调出模型库浏览器,在模型库中提取所需的模块放到仿真窗口,设置各模块参数。
晶闸管开环直流调速系统由主电路(交流电源、晶闸管整流桥、平波电抗器、直流电动机、触发电路)和控制电路(给定环节)组成,具体设置如下:1)三相交流电源的模型建立和参数设置①三相交流电源的模型建立首先从Simpowersystes 中的Electrical sources 电源模块组中选取一个交流电压源模块 AC Voltage Source,再用复制的方法得到三相电源的另两个电压源模块,用 Format(格式设定)菜单中 Rotate block(Ctrl +R)将模块水平放置,并点击模块标题名称,将模块标签分别改为“Uu ” 、“Uv ” 、“Uw ” ,然后从连接器模块 Connectors 中选取“Ground (output )”元件,按图 3-3-2 进行连接。
直流调速系统的MATLAB仿真(参考程序)
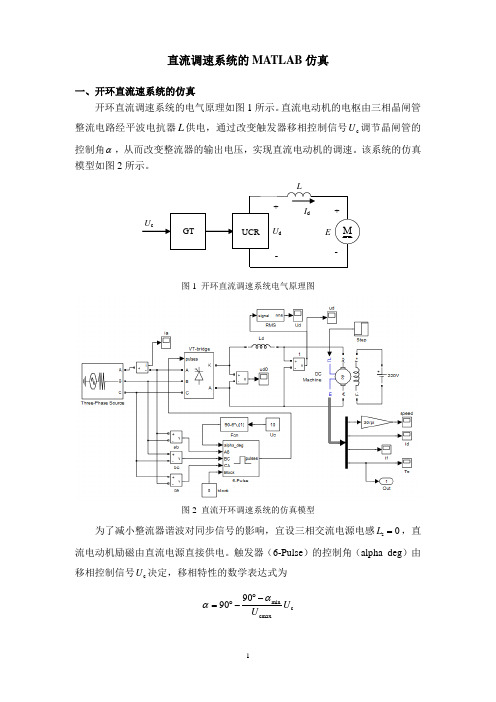
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅T e 60600.132 1.262π2πK K ==⨯≈ T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
直流调速系统的MATLAB仿真参考程序汇总
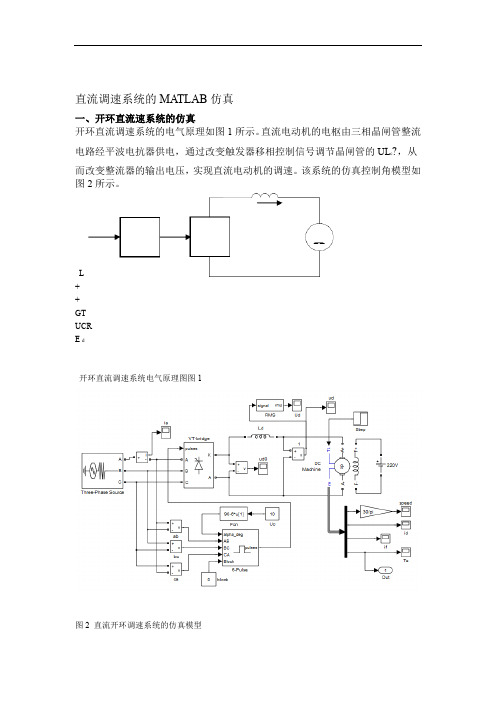
直流调速系统的MA TLAB仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器供电,通过改变触发器移相控制信号调节晶闸管的U L c ,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真控制角模型如图2所示。
L++GTUCRE d--开环直流调速系统电气原理图图1图2 直流开环调速系统的仿真模型L?0,直为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s流电动机励磁由直流电源直接供电。
触发器(6-Pulse)的控制角(alpha_deg)由U 决定,移相特性的数学表达式为移相控制信号c???90?min U?90??c U cmax 1??。
在直流电动机的负载,所以,在本模型中取U?10V6??30?90U?ccmaxmin转矩输入端用Step模块设定加载时刻和加载转矩。
T L仿真算例1已知一台四极直流电动机额定参数为,,136AIU?220V?NN22。
励磁电压,励磁电,,220VminUR?0.2??1460rn?/m?22.5NGD?fNa流。
采用三相桥式整流电路,设整流器内阻。
平波电抗器??1.5A0.3RI?recf。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动20mHL?d n、电磁转矩、电枢电流和起动后加额定负载时的电机转速及电枢电压的uTi ded变化情况。
220V?U N仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1)①供电电源电压U?RI220?0.3?136NNrec130(V)U???2?2.34?cos302.34cos?min②电动机参数励磁电阻:U220f)146.7(?R???f I1.5f励磁电感在恒定磁场控制时可取“0”。
电枢电阻:?0.2R?a电枢电感由下式估算:CU0.4?220N?19.1?L?19.1?0.0021(H)a2pnI2?2?1460?136NN L:电枢绕组和励磁绕组间的互感af U?RI220?0.2?136NNa?K?0.132(V?min/r)?e n1460N 2 6060K??0.132?K?1.26eTπ2π2K1.26T0.84(H)??L?af1.5I f电机转动惯量222.5GD2 )??0.57(kg?mJ?9.814?4g 额定负载转矩③模块参数名参数,直流电动机空载起动,5.0s3)设置仿真参数:仿真算法odel5s,仿真时间m171.4N??T 。
直流调速系统的MATLAB仿真(参考程序)

直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
MU d+I dGTU cE +--UCR图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
《MATLAB工程应用》---晶闸管开环直流调速系统仿真实验

《MATLAB工程应用》
晶闸管开环直流调速系统仿真
一、选题背景
本课程是在《电机学》《单片机》等课程上,独立设计的一门综合实验课程。
课程主要目的是培养学生分析问题,解决问题能力,提高学生自主学习,分工协作以及课程设计报告撰写水平。
二、方案论证(设计理念)
设计一个晶闸管直流调速系统仿真模型,通过改变触发器移相控制信号来调节晶闸管的触发角,而从获得可调的直流电压,以该直流输出为直流电机供电。
要求完成仿真模型图和仿真波形图,其中波形图包括直流电机的转速波形,电枢电流波形,转矩波形,改变触发角后的转速波形。
三、过程论述
直流电动机电枢由晶闸管整流电路经平波电抗器供电,通过改变触发器移相控制信号调节晶闸管的控制角,从而获得可调的直流电压,以实现直流电动机的调速。
移相控制信号,在实际调速时,给定信号是在一定范围内变化的,可通过仿真实践,确定给定信号允许的变化范围。
图1:构建的simulink仿真结构图
图2:参数设置
图3:波形
五、课程设计总结
仿真可得到闸管直流调速系统的输出波形。
电机转速波形,电枢电流波形,二者变化基本一致。
若将触发角改为30°,则转速波形发生明显改变,转速提高,这是因为直流电压增大的原因。
经过这段时间队MATLAB的学习,学会了对知识的汇总与运用,能够熟练使用相关软件,收获较大。
实验一、开环直流调速系统的仿真实验
实验一、开环直流调速系统的仿真实验实验一 开环直流调速系统的仿真一、实验目的 1、熟悉并掌握利用MATLAB 中Simulink 建立直流调速系统的仿真模型和进行仿真实验的方法。
2、掌握开环直流调速系统的原理及仿真方法。
二、实验内容开环直流调速系统的仿真框图如图1所示,根据系统各环节的参数在Simulink 中建立开环直流调速系统的仿真模型,按照要求分别进行仿真实验,输出直流电动机的电枢电流Id 和转速n 的响应数据,绘制出它们的响应曲线,并对实验数据进行分析,给出相应的结论。
+—*n ()U s s s 1K T s +1/1l R T s +m R T se1C ()n s Ed ()I s +dL ()I s _图1 开环直流调速系统的仿真框图开环直流调速系统中各环节的参数如下:直流电动机:额定电压UN = 220 V ,额定电流IdN = 55 A ,额定转速nN = 1000 r/min ,电动机电势系数Ce= 0.192 V ·min/r 。
假定晶闸管整流装置输出电流可逆,装置的放大系数Ks = 44,滞后时间常数Ts = 0.00167 s 。
电枢回路总电阻R =1.0 Ω,电枢回路电磁时间常数Tl = 0.00167 s ,电力拖动系统机电时间常数Tm = 0.075 s 。
对应额定转速时的给定电压Un*=4.364V 。
三、实验步骤 1、根据开环直流调速系统的各环节参数建立空载时的Simulink 仿真框图,如图2所示。
图2 空载时开环直流调速系统的仿真框图2、设置合适的仿真时间,利用out 器件或示波器将相关数据输出到MATLAB 的Workspace中,并在MATLAB中利用plot(X,Y)函数绘制出空载时直流电动机的电枢电流Id和转速n的响应曲线,记录并分析实验数据,给出相应的结论。
3、根据开环直流调速系统的各环节参数建立带负载时的Simulink仿真框图,如图3所示。
基于MATLAB的直流调压调速控制系统的仿真

基于MATLAB的直流调压调速控制系统的仿真本文将介绍基于MATLAB的直流调压调速控制系统的仿真。
直流调压调速控制器是一种常见的工业控制器。
在某些工业环境下,电机的转速和负载的变化需要由直流电机进行自动调整。
为了实现这个功能,需要用到直流调压调速控制系统。
对于大多数直流电机的应用来说,目标是精确地调整电机的转速并保持工作状态的稳定。
调节电机的转速需要对电机的所需磁场强度进行精确定义。
磁场强度的调整可以通过改变电机的额定电压来实现。
调节电机的负载需要改变电机的电流。
为了控制电机的转速和负载,需要通过控制电压和电流来实现。
在本文中,我们将演示如何使用MATLAB来模拟直流调压调速控制系统。
首先,需要建立模型。
模型的实现需要输入直流电源,与之并联的电机和控制器。
需要考虑电机的机械负载和电机本身的内阻。
控制器将根据设置的目标转速和负载来控制电机的电压和电流。
其次,需要选择适当的控制方法。
控制方法可以分为开环控制和闭环控制两种。
开环控制是将电压和时间作为输入,并根据预设的参数和控制算法来输出电机的电压和电流。
闭环控制是通过测量电机的实际转速和负载来调整电机的电压和电流,从而使其逼近预设值。
在实际应用中,通常使用闭环控制。
最后,需要设置实验参数并进行仿真。
实验参数包括直流电源和电机的额定电压、电阻和电感,以及控制器的控制参数。
仿真过程中,需要记录电机的转速、电压和电流参数,并对其进行分析和优化。
在进行仿真前,需要安装MATLAB和Simulink软件。
以下是MATLAB代码示例:```%% Define motor parametersRa = 2; % armature resistance in ohmsLa = 0.5e-3; % armature inductance in HJ = 2.5e-6; % rotor moment of inertia in kg*m^2B = 0.5e-6; % rotor viscous damping in N*m*s/rad%% Simulate the systemsim('dc_motor_control');```Simulink模型可以包括以下组件:- 直流电源模块- 直流电机模块- 控制器模块- 仿真时钟模块控制器模块可以使用PID控制器或其他类型的控制器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东北石油大学MATLAB电气应用训练2013年 3 月 8日MATLAB电气应用训练任务书课程 MATLAB电气应用训练题目直流电动机开环调速系统仿真专业电气信息工程及其自动化姓名赵建学号 110603120121主要内容:采用工程设计方法对双闭环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的MATLAB /SIMULINK 仿真模型。
分析系统起动的转速和电流的仿真波形,并进行调试,使双闭环直流调速系统趋于合理与完善基本要求:1.设计直流电动机开环调速系统2.运用MATLAB软件进行仿真3.通过仿真软件得出波形图参考文献:[1] 陈伯时. 电力拖动自动控制系统—运动控制系统第3版[M]. 北京:机械工业出版社, 2007.[2] 王兆安, 黄俊. 电力电子技术第4版[M]. 北京:机械工业出版社, 2000.[3] 任彦硕. 自动控制原理[M]. 北京:机械工业出版社, 2006.[4] 洪乃刚. 电力电子和电力拖动控制系统的MATLAB仿真[M]. 北京:机械工业出版社, 2006.完成期限 2013.2.25——2013.3.8指导教师李宏玉任爽2013年 2 月25 日目录1课题背景 (1)2直流电动机开环调速系统仿真的原理 (2)3仿真过程 (5)3.1仿真原理图 (5)3.2仿真结果 (9)4仿真分析 (12)5总结 (13)参考文献 (14)1课题背景直流调速是现代电力拖动自动控制系统中发展较早的技术。
在20世纪60年代,随着晶闸管的出现,现代电力电子和控制理论、计算机的结合促进了电力传动控制技术研究和应用的繁荣。
晶闸管-直流电动机调速系统为现代工业提供了高效、高性能的动力。
尽管目前交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。
但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。
现在的直流和交流调速装置都是数字化的,使用的芯片和软件各有特点,但基本控制原理有其共性。
长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法。
以使系统模型等为计算机所接受,然后再编制成计算机程序,并在计算机上运行。
因此产生了各种仿真算法和仿真软件。
由于对模型建立和仿真实验研究较少,因此建模通常需要很长时间,同时仿真结果的分析也必须依赖有关专家,而对决策者缺乏直接的指导,这样就大大阻碍了仿真技术的推广应用。
MATLAB提供动态系统仿真工具Simulink,则是众多仿真软件中最强大、最优秀、最容易使用的一种。
它有效的解决了以上仿真技术中的问题。
在Simulink中,对系统进行建模将变的非常简单,而且仿真过程是交互的,因此可以很随意的改变仿真参数,并且立即可以得到修改后的结果。
另外,使用MATLAB中的各种分析工具,还可以对仿真结果进行分析和可视化。
Simulink可以超越理想的线性模型去探索更为现实的非线性问题的模型,如现实世界中的摩擦、空气阻力、齿轮啮合等自然现象;它可以仿真到宏观的星体,至微观的分子原子,它可以建模和仿真的对象的类型广泛,可以是机械的、电子的等现实存在的实体,也可以是理想的系统,可仿真动态系统的复杂性可大可小,可以是连续的、离散的或混合型的。
Simulink会使你的计算机成为一个实验室,用它可对各种现实中存在的、不存在的、甚至是相反的系统进行建模与仿真。
传统的研究方法主要有解析法,实验法与仿真实验,其中前两种方法在具有各自优点的同时也存在着不同的局限性。
随着生产技术的发展,对电气传动在启制动、正反转以及调速精度、调速范围、静态特性、动态响应等方面提出了更高要求,这就要求大量使用调速系统。
由于直流电机的调速性能和转矩控制性能好,从20世纪30年代起,就开始使用直流调速系统。
它的发展过程是这样的:由最早的旋转变流机组控制发展为放大机、磁放大器控制;再进一步,用静止的晶闸管变流装置和模拟控制器实现直流调速;再后来,用可控整流和大功率晶体管组成的PWM 控制电路实现数字化的直流调速,使系统快速性、可控性、经济性不断提高。
调速性能的不断提高,使直流调速系统的应用非常广泛。
2直流电动机开环调速系统仿真的原理直流电动机电枢由三相晶闸管整流电路经平波电抗器L 供电,并通过改变触发器移相控制信号Uc 调节晶闸管的控制角,从而改变整流器的输出电压实现直流电动机的调速。
该系统的仿真模型如图1-1 所示。
在仿真中为了简化模型,省略了整流变压器和同步变压器,整流器和触发同步使用同一交流电源,直流电动机励磁由直流电源直接供。
任何一台需要控制转速的设备,其生产工艺对调速性能都有一定的要求。
例如,最高转速与最低转速之间的范围,是有级调速还是无级调速,在稳态运行时允许转速波动的大小,从正转运行变到反转运行的时间间隔,突加或突减负载时允许的转速波动,运行停止时要求的定位精度等等。
归纳起来,对于调速系统转速控制的要求有以下三个方面:(1) 调速。
在一定的最高转速和最低转速范围内,分档地(有级)或平滑地(无级)调节转速。
(2) 稳速。
以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波动,以确保产品质量。
(3) 加、减速。
频繁起、制动的设备要求加、减速尽量快,以提高生产率;不宜经受剧烈速度变化的机械则要求起、制动尽量平稳。
为了进行定量的分析,可以针对前两项要求定义两个调速指标,叫做“调速范围”和“静差率”。
这两个指标合称调速系统的稳态性能指标。
(1) 调速范围生产机械要求电动机提供的最高转速m ax n 和最低转速m in n 之比叫做调速范围,用字母D 表示,即m inm ax n n D ( 1 ) 其中,m ax n 和m in n 一般都指电动机额定负载时的最高和最低转速,对于少数负载很轻的机械,例如精密磨床,也可用实际负载时的最高和最低转速。
(2) 静差率当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落N n ∆,与理想空载转速0n 之比,称作静差率s ,即0n n s N ∆=( 2 )或用百分数表示%1000⨯∆=n n s N ( 3 ) 显然,静差率是用来衡量调速系统在负载变化时转速的稳定度的。
它和机械特性的硬度有关,特性越硬,静差率越小,转速的稳定度就越高。
然而静差率与机械特性硬度又是有区别的。
一般变压调速系统在不同转速下的机械特性是互相平行的,对于同样硬度的特性,理想空载转速越低时,静差率越大,转速的相对稳定度也就越差。
由此可见,调速范围和静差率这两项指标并不是彼此孤立的,必须同时提才有意义。
在调速过程中,若额定速降相同,则转速越低时,静差率越大。
如果低速时的静差率能满足设计要求,则高速时的静差率就更能满足要求了。
因此,调速系统的静差率指标应以最低速进所能达到的数值为准。
(3) 直流变压调速系统中调速范围、静差率和额定速降之间的关系在直流电动机变压调速系统中,一般以电动机的额定转速N n 作为最高转速,若额定负载下的转速降落为N n ∆,则按照上面分析的结果,该系统的静差率应该是最低速时的静差率,即N N N n n n n n s ∆+∆=∆=min min 0 ( 4 ) 于是,最低转速为()s n s n s n n N N N ∆-=∆-∆=1min ( 5 ) 而调速范围为minmin max n n n n D N ==( 6 ) 将上面的m in n 式代入,得()s n s n D N N -∆=1 ( 7 ) 式(7)表示变压调速系统的调速范围、静差率和额定速降之间所应满足的关系。
对于同一个调速系统,N n ∆值一定,由式(7)可见,如果对静差率要求越严,即要求s 值越小时,系统能够允许的调速范围也越小。
图 1 直流开环调速系统电气原理3仿真过程3.1仿真原理图图2 直流电动机开环调速系统结构图根据实验原理图在MATLAB软件环境下查找器件、连线,接成入上图所示的线路图。
1)仿真具体步骤a、点击图标,打开MATLAB软件,在工具栏里根据提示点击,点击MATLAB ,打开一个对话框,点击里的new model,创建一个新文件。
b、点击工具栏的,打开元器件库查找新的元器件。
C、原件库如下图所示图3 原件库2)所用元器件及其参数设置a)三相交流电源A、B、C图4 三相电源参数设置设置三相电压都为220V,两两之间相位差为120,分别为0、-120、-240。
b)6-Pulse Generator图5 6-Pulse Generatorc)Universal Bridge普通的桥电路起着过载保护作用,防止电流过大烧坏电机。
图6 Universal Bridged) DC Machine(直流电动机)直流电动机的运行特性主要有两条:一条是工作特性,另一条是机械特性,即转速-转矩特性。
分析表明,运行性能因励磁方式不同而有很大差异。
F+和F-是直流电机励磁绕组的连接端,A+和A-是电机电枢绕组的联结端,TL 是电机负载转矩的输入端。
m端用于输出电机的内部变量和状态,在该端可以输出电机转速、电枢电流、励磁电流和电磁转矩四项参数。
修改参数电枢电阻和电感(Armature resistance and inductance)为[0.210.0021],励磁电阻和电感(Field resistance and inductance)为[146.70],励磁和电枢互感(Field-armature mutual inductance)为0.84,转动惯量(Total inertia)为0.572,粘滞摩擦系数(Viscous friction coefficient)为0.01,库仑摩擦转矩(Coulomb friction torque)为1.9,初始角速度(initial speed)为0.1。
图7直流电机设置e)放大器,设置放大系数。
图8放大器设置f)阶跃信号图9阶跃信号设置3.2仿真结果由以上原理图绘制,参数设置,以及波形调试得出以下仿真结果,其波形图如下所示:以下波形分别为转速n,电枢电流Ia,励磁电流If,转矩Ta)转速n图10 转矩n波形图b)电枢电流Ia图11电枢电流波形图C)励磁电流If图12励磁电流波形图d)输出电压ud图13输出电压波形图e)RSM输出电压ud1图14 RSM输出电压波形图f)转矩T图15 转矩波形图4仿真分析从上图仿真的波形可以看出,此仿真非常接近于理论分析的波形。
U就可以改变电动机的转晶闸管-电动机系统就是开环调速系统,调节控制电压c速。
如果负载的生产工艺对运行时的静差率要求不高,这样的开环调速系统都能实现一定范围内的无级调速。