8变幅机构
《变幅机构》课件

PART 04
变幅机构的设计与优化
REPORTING
设计原则
功能性
变幅机构应具备所需的 功能,满足使用需求。
稳定性
机构应能在各种工况下 稳定运行,保证操作的
可靠性和安全性。
效率性
机构的设计应能提高工 作效率,减少能量损失
和不必要的摩擦。
经济性
在满足功能和稳定性的 前提下,应尽量降低制
造成本。
优化方法
详细描述
变幅机构是利用振动原理工作的机械装置,其主要功能是改变振动的振幅,即振动的最大位移量。在 工业生产中,变幅机构常用于实现物料的输送、筛选和成型等作业。通过调整变幅机构的参数,可以 优化物料在输送过程中的流动性和筛选效果,提高生产效率和产品质量。
变幅机构分类
总结词
根据不同的分类标准,变幅机构可以分为多种类型, 如按结构可分为简谐式和复合式,按功能可分为正向 和负向变幅机构等。
详细描述
根据结构特点,变幅机构可分为简谐式和复合式两类。 简谐式变幅机构结构简单,主要由振动源和变幅杆组成 ,通过振动源产生的振动传递到变幅杆上,使变幅杆的 振幅发生变化。复合式变幅机构则由多个简谐式变幅机 构组合而成,可以实现更复杂的振幅变化。此外,根据 功能特点,变幅机构可分为正向和负向变幅机构,正向 变幅机构用于增大振幅,负向变幅机构则用于减小振幅 。
《变幅机构》PPT课 件
REPORTING
• 引言 • 变幅机构概述 • 变幅机构的应用 • 变幅机构的设计与优化 • 变幅机构的未来发展 • 结论
目录
PART 01
引言
REPORTING
课程背景
01
介绍变幅机构在工程领域的应用 和重要性,如起重机、挖掘机等 。
第九章 变幅机构

— —滑轮效率
6)牵引绳下垂度引起的阻力H
H (4 ~ 6)q1l
(2)牵引绳最大张力
作用在小车上的最大运行阻力为上述各项阻力之和:
W W f WS W p W p WW S H
牵引绳的最大张力为:
S W
1
1
1
(W f WS W p W p WW S H )
图9-1 变幅方案
3 、非平衡变幅机构和平衡变幅机构
幅度改变时,物品和臂架的重心要变化,为克服 重心变化引起的阻力,需要很大的驱动功率.因此, 在非工作性变幅时采用非平衡变幅,在工作性变幅 时采用平衡变幅。
4 、动臂变幅保持重物水平移动的方法
(1)滑轮组补偿法: 补偿原理:吊钩随吊臂 端点的上升而上升,又由于 补偿滑轮组长度的缩短而下 降,如满足下式:
式中:T——正常工作时的最大变幅力;
v — —变幅钢丝绳速度;
2 — —滑轮组倍率;
2, — —变幅滑轮组和导向滑轮效率;
2 — —变幅机构传动效率;
(5)制动力矩计算
M T M max
M max
Tmax Dm 2 2 2 2 i
M max — —最大变幅力Tmax 换算到制动器轴上的最大力矩;
V — —小车运行速度
t S — —起动时间
回转时小车和重物的离心力W
p
Wp
( PQ G)n 2 R 900
n — —起重机回转速度(r / min)
R——幅度(m)
4)迎风阻力 WW
WW qt A
qt — —工作风压 A——重物和小车的迎风面积
第九章 变幅机构
卷筒长: l
(3)卷筒转速
1.1(l k 3D1 ) n( D dn)
变幅速度:v Rmax Rmin
t
绕入卷筒的变幅钢丝绳速度:
v 卷筒速度:n D1
v 2 (
xmax xmin )v Rmax Rmin
(4)驱动功率及电机选择
N Tv 1000 2 2 2
取以下三种工况计算最大变幅力
1)稳定回转时起升重物
1 Tmax [PQ 0.5Gb ) L cos (Wb Pb )h1 (WQ F )h2 Sd ] l
— —动载系数
2)变幅与起升同时发生,并处于起动
1 Tmax [PQ 0.5Gb ) L cos Wb h1 WQ h2 Sd ] l
小车变幅: 优点:变幅时重物作水平移动,给安装工作带来方便; 速度快,功率省,幅度有效利用率大; 缺点:吊臂承受较大的弯矩,吊臂结构笨重,用钢量 大; 动臂式变幅机构: 优点:具有较大的起升高度,不易产生死角,拆装也 比较方便; 缺点:幅度的有效利用率低,变幅速度不均匀,不能 水平移动,变幅功率较大。
轮胎式起重机。
2 变幅力确定 (1)正常工作时变幅机构的作用力 总阻力矩:
M ( PQ 0.5Gb ) L cos (Wb Pb )h1 (WQ F )h2 Sd
Gb n 2 Pb (2m L cos ) 1800
F
PQ n 2 900
(m L cos ) S
图9-9
2、牵引计算
(1)阻力分析 包括六种阻力:
摩擦阻力Wt ; 坡度阻力WS ; 惯性阻力Wp ; 逆风阻力WW ;
起升绳阻力S 和牵引绳下垂度引起的阻力H.
第九章变幅机构

第二节 载重水平位移
因此,如果起升滑轮组的倍率仇和补偿滑轮组的 倍率mF之间能保持下列关系时,物品就可以准确地 沿水平线移动
在转柱式的结构中,将补偿滑轮组布置在转柱里面,由油缸推动滑轮组动 滑轮而使臂架摆动变幅,且动滑轮又与臂架的平衡对重合并布置,这样可以得 到很紧凑的变幅。
第二节 载重水平位移
第二节 载重水平位移
在用臂架摆动进行变幅的起重机中,为使载重在 变幅过程中沿水平线或近似水平线移动,可以采用多 种形式来达到,但基本上可以归纳为两种: ➢绳索补偿法; ➢组合臂架法。
一、绳索补偿法
第二节 载重水平位移
一、绳索补偿法 它的特点是:物品在变幅过程中引起的升降现象依靠
工作性变幅机构可使物品沿起重机的径向做水平移动,以扩大起重机的
服务面积和提高工作机动性。这种变幅是在带载条件下进行,其变幅过程为每 一工作周期主要工序之一,这类变幅机构称为工作性变幅机构。其主要特征是 变幅频繁,变幅速度对装卸生产率有直接影响,所以在这类变幅机构中,一般 应采用较高的变幅速度以提高装卸生产率,通常变幅速度为40~90m/min。这 种变幅机构在构造上较为复杂,但工作性能则显著改善,例如采用吊重水平位 移及臂架自重平衡系统,大大降低变幅功率,使起重机在增大变幅速度、频繁 变幅的条件下,能选用不太大的电动机,消耗合适的能量。
一、绳索补偿法
第二节 载重水平位移
以上所述各类绳索补偿法的共同缺点是: 起升绳长度大,磨损快,小幅度时物品悬挂长度大,
摆动也大。
以上所述各类绳索补偿法的共同优点是: 使用单臂架,构造简单,质量小。
二、组合臂架法
二、组合臂架法:
组合臂架法的特点是,物品在变幅过程中的水 平移动不是依靠收人或放出一定重越升绳的办法 来达到的,而是依靠臂架端点在变幅过程中沿水 平线或接近水平线的轨迹移动来保证。
变幅机构
1.变幅机构的类型与特点变幅机构:用来改变起重机幅度的机构。
按照工作性质可分为非工作性变幅机构和工作性变幅机构。
按照结构形式可分为运行小车式和臂架式。
按臂架的变幅性能可分为普通臂架变幅机构和平衡臂架变幅机构。
1.变幅机构的类型与特点 1.1非工作性变幅机构和工作性变幅机构(1)非工作性变幅机构:空载变幅。
特点:变幅次数少,变幅阻力较小,变幅时间对特点:变幅次数少,变幅阻力较小,变幅时间对起重机的生产率影响小,可采用较低的变幅速度(0.16~0.25m/s)以减小变幅机构的驱动功率。
构造简单,自重轻。
(2)工作性变幅机构:带载变幅。
特点:变幅次数频繁,对生产率有直接影响,较高的变幅速度(0.33~1.66m/s),驱动功率较大。
构造复杂,重量大。
1.变幅机构的类型与特点 1.2运行小车变幅机构和臂架式变幅机构(1)运行小车式(1)运行小车式小车沿臂架运行来实现变幅。
运行小车有自行式和牵引式两种。
特点:物品位置确定,驱动功率小,变幅速度快;臂架承受较大的弯矩,结构自重大。
1.变幅机构的类型与特点(2)臂架式可分为臂架摆动式和臂架伸缩式两种。
特点:起升高度大,幅度有效利用率低,变特点:起升高度大,幅度有效利用率低,变幅速度不均匀,变幅功率大。
1.变幅机构的类型与特点 1.3普通变幅机构和平衡臂架变幅机构载荷水平位移;臂架自重平衡。
2.变幅机构的设计计算 2.1普通臂架变幅机构的设计计算计算前提:臂架的结构形式,主要尺寸,驱动机构形式。
计算内容:变幅力,变幅机构主要参数,计算内容:变幅力,变幅机构主要参数,原动机及制动装置的选择计算。
2.1.1绳索滑轮组变幅机构的计算1变幅力计算(1)正常工作时的变幅力考虑带载变幅。
正常工作的变幅力一般以变幅和回转两机构同时工作,机构均作稳定运动的工况计算。
2.1.1绳索滑轮组变幅机构的计算2.1.1绳索滑轮组变幅机构的计算(2)最大变幅力按最大变幅力选择零件。
最大变幅力按下列三种工况计算。
变幅机构

1.变幅机构的类型与特点 变幅机构:用来改变起重机幅度的机构。
按照工作性质可分为非工作性变幅机构和工作性变幅机构。
按照结构形式可分为运行小车式和臂架式。
按臂架的变幅性能可分为普通臂架变幅机构和平衡臂架变幅机构。
1.变幅机构的类型与特点 1.1非工作性变幅机构和工作性变幅机构 (1)非工作性变幅机构:空载变幅。
特点:变幅次数少,变幅阻力较小,变幅时间对 特点:变幅次数少,变幅阻力较小,变幅时间对起重机的生产率影响小,可采用较低的变幅速度(0.16~0.25m/s)以减小变幅机构的驱动功率。
构造简单,自重轻。
(2)工作性变幅机构:带载变幅。
特点:变幅次数频繁,对生产率有直接影响,较高的变幅速度(0.33~1.66m/s),驱动功率较大。
构造复杂,重量大。
1.变幅机构的类型与特点 1.2运行小车变幅机构和臂架式变幅机构 (1)运行小车式 (1)运行小车式 小车沿臂架运行来实现变幅。
运行小车有自行式和牵引式两种。
特点:物品位置确定,驱动功率小,变幅速度快;臂架承受较大的弯矩,结构自重大。
1.变幅机构的类型与特点 (2)臂架式 可分为臂架摆动式和臂架伸缩式两种。
特点:起升高度大,幅度有效利用率低,变 特点:起升高度大,幅度有效利用率低,变幅速度不均匀,变幅功率大。
1.变幅机构的类型与特点 1.3普通变幅机构和平衡臂架变幅机构 载荷水平位移;臂架自重平衡。
2.变幅机构的设计计算 2.1普通臂架变幅机构的设计计算 计算前提:臂架的结构形式,主要尺寸,驱动机构形式。
计算内容:变幅力,变幅机构主要参数, 计算内容:变幅力,变幅机构主要参数,原动机及制动装置的选择计算。
2.1.1绳索滑轮组变幅机构的计算 1变幅力计算 (1)正常工作时的变幅力 考虑带载变幅。
正常工作的变幅力一般以变幅和回转两机构同时工作,机构均作稳定运动的工况计算。
2.1.1绳索滑轮组变幅机构的计算2.1.1绳索滑轮组变幅机构的计算 (2)最大变幅力 按最大变幅力选择零件。
变幅机构的名词解释

变幅机构的名词解释在机械领域中,变幅机构是指能够调节和改变输出运动幅度的装置。
它在工程设计和制造中扮演着重要的角色,可以提供灵活性和多样性。
变幅机构可以用于各种机械系统中,例如工业生产线、机器人技术和运输设备等。
本文将对变幅机构进行详细的解释,包括其工作原理、应用领域以及进一步的研究方向。
一、工作原理变幅机构的工作原理基于其结构和运动学性质。
它由一系列组件和连接件组成,通过调整这些组件的位置和角度,实现输出运动的幅度变化。
通常,变幅机构包含一个输入驱动件、一个输出动件以及一系列中间连接件。
输入驱动件提供输入运动,通过中间连接件的传递,将这一运动输出到输出动件,从而实现幅度的调节。
变幅机构可以采用不同的机械结构实现,常见的包括滑块机构、连杆机构和齿轮机构等。
这些结构都有不同的工作原理和特点,适用于不同的应用场景。
例如,滑块机构通过滑块和导轨之间的互动实现幅度调节,连杆机构通过连杆的长度和角度变化实现幅度调节,齿轮机构通过齿轮的齿数和齿轮间的传动比实现幅度调节。
二、应用领域变幅机构在工程设计和制造中有广泛的应用。
其中,它在运输设备行业和机器人技术领域尤为重要。
在运输设备中,变幅机构常用于起重机、挖掘机和天车等设备中。
通过调节变幅机构,可以改变这些设备的工作范围和灵活性,使其适应不同的工作要求。
例如,起重机在进行高空作业时,需要具有较大的幅度范围以覆盖更广的工作区域;而在进行近距离作业时,需要具有较小的幅度范围以提高精确度和安全性。
在机器人技术中,变幅机构是实现机器人灵活运动的关键。
机器人往往需要在不同的工作环境中工作,因此需要具备调整和改变运动幅度的能力。
通过变幅机构,机器人可以适应不同的任务需求,如在狭小空间中执行精确操作或在开放空间中执行广泛移动。
三、进一步研究方向随着科技的不断进步,变幅机构的研究和发展也在不断进行。
未来的研究方向可以集中在以下几个方面。
首先,改进变幅机构的设计和制造技术。
通过采用新的材料、新的制造工艺和先进的计算方法,可以提高变幅机构的性能和可靠性。
变幅机构PPT课件
§11-2 载重水平变幅
一.绳索补偿法
3.补偿导向滑轮法 ①.工作原理——在起升绳 缠绕系统中,增加一个导 向滑轮补偿装置,从而使 变幅过程中,由于补偿导 向滑轮位置的变化,使得 从卷筒到臂架头部的钢丝 绳连接长度发生变化并与 吊钩随臂架头部的升降相 补偿,则吊钩就实现走水 平。
2.使物品绕回转轴线作径向水平 移动,以提高生产率,扩大服务 范围和改善工作机动性(工作性 变幅)。
第2页/共45页
§11-1 概述
三.变幅机构的类型
1.根据工作性质分类 ①.非工作性变幅机构——特点: 空载下调整工作位置,在物品吊 运过程中,幅度不变;或者用来 放倒臂架,以利运输。通常用非 平衡变幅机构。
第4页/共45页
§11-1 概述
三.变幅机构的类型
2.根据变幅方法分类
②.俯仰臂架式变幅机构——特 点:幅度的改变是依靠动臂绕其 铰轴俯仰来实现,可用于工作性 和非工作性变幅。优点:臂架受 力情况较有利,结构自重较轻, 起重机的重心低,稳定性好,机 动性较好。缺点:难于获得较小 的起重机最小幅度,变幅速度不 均匀,物品容易摇摆。解决方法 措施复杂。
§11-1 概述
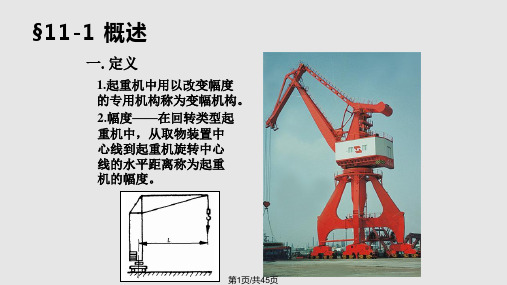
一.定义
1.起重机中用以改变幅度 的专用机构称为变幅机构。 2.幅度——在回转类型起 重机中,从取物装置中 心线到起重机旋转中心 线的水平距离称为起重 机的幅度。
第1页/共45页
§11-1 概述
二.作用
1.在载重力矩不超过额定值的前 提下,改变幅度以调整起重机的 起重能力,提高起重机的利用程 度,或者通过改变幅度来调整取 物装置的工作位置,以适应装卸 路线的需要,提高工作的机动性 (非工作性变幅)。
第21页/共45页
变幅机构计算.doc
变幅机构零件的设计计算及校核3.1变幅机构零件的设计计算3.1.1电动机的选择1选择电动机类型和结构型式电动机类型和结构型式可以根据电源的种类、工作条件(温度、环境、空间尺寸)和载荷特点(性质、大小、启动性能和过载情况)来选择。
因为塔式起重机回转实验台的变幅机构需要小车快速的频繁的启动、停止,启动时间在0~0.1s之间,所以选择交流伺服电动机。
2确定电动机容量电动机容量(功率)选得合适与否,对电动机的工作和经济性都有影响,当容量小于工作要求的时候,电动机不能保证工作机的正常工作,或使电动机因长期过载发热量大而过早损坏;容量过大则电动机价格高,能量充分利用,经常处于不满载运行,其效率和功率因数都降低,增加电能消耗造成很大浪费。
电动机容量主要根据电动机运行的发热条件来决定。
电动机的发热与其运行状态有关。
对于长期连续运转,载荷不变或变化很小,常温下工作的机械,只要所选电动机的额定功率Pm等于或大于所需电动机功率P0,即Pm>=P0,电动机在工作时就不会过热,而不必校验发热和起动力矩。
伺服电动机也称为执行电动机,在控制系统中用作执行元件,将电信号转换为轴上的转角或转速,以带动控制对象。
伺服电动机有交流和直流两种,它们的最大特点是可控。
在有控制信号输入是,伺服电动机就转动;没有控制信号输入时,则停止转动;所受控制电压的大小和相位(或极性)就可以改变伺服电动机的转速和转向。
因此,它与普通电动机相比具有如下特点:调速范围广,伺服电动机的转速随着控制电压改变,能在宽广的范围内连续调速。
(1) 工作机所需功率Pw工作机所需功率Pw(W)应由机器的工作阻力和运动参数确定。
此设计中,由于本实验台要求快速的频繁的启动、停止、运动,所以瞬时加速度在0~20m/s,由设计任务书中给定的工作参数按式(3-1)计算:Pw=FwVw/ηw (3-1) 式中Fw是工作机的阻力(N);Vw是工作机的额定速度(m/s);ηw是工作机的效率。
68m登高平台消防车折叠臂变幅机构优化分析

水平 地 面 ) 范 围 内 作 业 。该 变 幅 机 构 为一 平 面 五 杆机 构 ,为保 证 操 作平 稳 可靠 ,提 高 宜 人 性要 求 , 铰点 位 置对 系 统 的操 作 性 能 影 响 明显 ,因此 该 变 幅机 构优 化 的主要 内容 为系统 铰 点布 置优 化 。
D E
Ke ywor s: a ra af r fr r k;l fi g m e ha s ;o tm a sgn d e i lplto m e tuc i u n c nim p i lde i
6 登高 平 台消 防 车 由 于作 业 高 度 高 ,幅度 8m 大 ,设 计 上 采 用 了两 臂 折 叠 式 ,折 叠 臂 式 登 高 平 台消 防车 的 2号 臂 变 幅机 构是 整 车 中的 重 要 机 构 ,
l et rsuecag rdet T eot i t nrsl r rt nl n rdbe adhv enue rccl r et o s pesr hn e ain. h pi z i u s e a oa adceil, n ae e sdi pat a po c w g m ao e ta i b n i j .
8。 6 ,之 后 ,2号 臂 就 可 以在 一7 。~ 十7 。 ( 对 1 1 相
图 2 2号 臂 变 幅 机 构 数 学 模 型
1 1 各 点坐 标计 算 . 在 图 2 所 示 的 坐 标 系 中 ,设 各 点 坐 标 为
O( 。 o ,A( y ) B( y ) X ,r ) X , A, X , R ,C( X , Y) c ,D( ,Y ) XD D ,E( ,Y ) XE E ,G( ,Y ) XG G 。
维普资讯
Ab t a t c a is mo e ft e No 1a d 2 b o l f n c a im ft e 6 p afr f e t c sb i n sr c :A me h nc d l . n o m uf g me h n s o h 8 m l t m r r k i ul a d o h i o i u t
变幅机构
4.工作性变幅机构设计内容
(1)设计货物水平位移系统
补偿型式,臂架系统几何尺寸
(2)设计臂架自重平衡系统
平衡方式,平衡系统几何尺寸, 平衡重重量
(3)设计变幅驱动机构
驱动型式和传动方案,传动装置 的选型和计算
(4)安全辅助装置的设计
2020/9/14
缓冲装置,限位装置等
3
二.货物水平位移 变幅过程中,货物沿水平线或近似水平线轨迹移动
货物全幅度上的最大高度偏差值应满足
ymax ymax ymin 0.03 Rmax Rmin
B)校验货物未平衡力矩 ——由于合力不通过臂架下铰点所产生的力矩
a)分别求出各幅度臂架位置的未平衡力矩:
MQ F r b)作出货物未平衡力矩曲线并校核,应满足
MQmax MQ max 0.05 ~ 0.1 PQ Rmax
② 一般取: mb =3( mq =1), mb =5( mq =2)
③ 确定补偿滑轮组中定滑轮的安装位置 O 1
原理:当 PQ 与 S 合力 F 的作用线通过臂架下 O 时,货物引起
的变幅阻力矩为零
S
PQ mq
mb
F PQ S
a)取两中间幅度位置OA1、 OA2 距 Rmax 和 Rmin 各 1/4 处;
b)分别过 OA1、 OA2 作力的三角形 使合力 F 的延长线通过臂架下铰点;
c)分别过 OA1、 OA2 作 S 力的延长线
2020/9/交14 点 O 1 即为初求。
6
④ 设计校验
A) 校验货物水平位移高度偏差 取6~8个臂架位置,分别求出各幅度位置时的货物高度偏差值,即:
yi mq yi y1 mb li l1
带载变幅
基于AMESim的QY8A汽车起重机变幅机构仿真与分析

工作 阻力波动分 别与转 子 转速 、刀具切削前角成 反 比,
1 0 0 C MT M 2 0 1 3 . 0 1
西教学区 ( 小寨校区) 2 1 3 信箱( 7 1 0 0 6 4 )
一
流量 . 压力 放大 系数 ,或称弹性系数 。
—
,
Qr
]
—
-
cI /
p j )
鼓负荷 增加见 表 2~表 3 及图 1 1 ~图 l 4 。
2007 .
参考文献
【 1 ]肖宝 山 . 铣刨机铣 削力及铣 削功率 的计算 [ J ] . 工程 机械,
4 结
语
[ 2 ] 赵敏 . 沥 青 路 面 铣 刨 机 作 业 阻 力及 牵 引性 能 的研 究 [ D ] . 两 安 : 长安 大 学 ,2 0 0 3 .
系统的仿真。 仿真结果直观的反映了起重机变幅起升过程中系统的动态特性, 以便进行其优化设计。 关键 词: 汽车起重机 变幅机构 A ME s i m 仿真 建模
汽车起 重 机变 幅系统 主要 是改 变起 重 机 工作 过程 这一 整 套基 本独 立 完整 的液 压 回路结 构 中,平衡 阀安 的幅度 ,来完 成各种不 同的工作状况 。变 幅机构的合理 装在 油缸下部 , 使变 幅油缸平稳下 降, 并防止油缸下沉,
第七章 变幅机构 ppt课件

R m ax时, m in 20 ~ 40
R m in时, m ax 60 ~ 80
ppt课件
31
ppt课件
32
③过Ⅱ臂架端点A2作垂线截取 A2 B2 PQ ,过A3点, 作垂线截取 A B P
3 3 Q
mF ④分别以B2、B3为圆心,以 S m PQ
为半径画弧,交于OA2、OA3于C2、C3 两点.
Smax R max f
ⅲ.确定角度:通常 1 40 ~ 50
1 10 ~ 25
2 80 ~ 85
2 5 ~ 10 3
ppt课件 39
ⅳ.确定臂架长度L及象鼻梁长度L1 (1)先作最小幅度位置,过O点作与垂线 夹角为γ 3=5º~10º的臂架位置。 (以Smin为水平点定A2点)过点A2作与垂 线夹角γ 2的象鼻梁位置线交于B2点。 得:
有时由于结构布置需要,不在延长线上,而 向上350—600mm。
ppt课件 41
②拉杆长度l3和铰点O1位置 : 选三个位置 A1 (R max) 、 A 2 (R min ) 与A3(距A1点
S S ~ 4 5
处)
ppt课件
42
③按C1、C2、C3点求圆心O1,即作 C1C3
和 C2C3 的中垂线交于一点就是O1点。 ⅵ 检验: 目的:要求吊重走水平,臂架受力矩最小, 另外还要满足总体布置要求。
ppt课件 37
2.设计要求: 保证物品在变幅过程中尽可能沿接近于水平 线移动。系统尺寸尽可能紧凑,自重轻,装卸 方便,铰点位置要适合总体要求。
ppt课件
38
(1)图解法 步骤: ⅰ.已知参数Rmin,Rmax、H0 ⅱ.根据构造和总体布置初定臂架下铰点位置 O点。相应就定了f 和 H0.
变幅机构
于最低点时,不能碰机房。
49 变幅机构 12
3.根据最大幅度、最小幅度及中间幅度定出对重的 三个位置 E1 、 E3 、 E2 。
4.根据受力及结构上的安排定下铰点B1的位置。
49
变幅机构
13
5.用旋转法定出平衡杠杆尺寸(确定D点) 原理:三个幅度下对重与臂架的相对位置不变 a.作辅助线 O1B2, O1B3 。 假想O1B2与O1E2 、 O1B3 与 O1E3相对位置“固定”。
初步设计时假定对重杠杆系统的杠杆重量可以略去不计
图解法 1.根据布置的方便,定下O、 O1位置及 R尾 2.定对重重量 G对 = G臂 ·h2 / h2′ b. h2指的是最大、最小幅度时G臂的高度差 c. h2′指的是最大、最小幅度时对重的高度 差。 h2′要考虑尾部部半径,及对重位 考虑几个因素: a. G臂包括臂架、象鼻梁、大拉杆的重量
49
∴ 能严格走水平 但拉索的调整十分重要
变幅机构 20
§5-3 变幅机构的主要传动型式
一、非平衡式变幅机构――绳索滑轮组传动
特点:简单、自重轻,适用于流动式起重机 注意:1.小幅度时的安全问题――防险拉索 2.单向受力,不能用于平衡式变幅臂架 二、平衡式变幅机构的传动 1.齿条传动 优点:制造简单、安装方便 缺点:开式传动,磨损大,需防止超越行程
49 变幅机构 21
2、螺杆螺母传动 优点:结构紧凑,传动平稳,适用于大起重量 缺点:螺杆不能受弯,效率较低,必须注意润滑问 题,需防止超行程 滚珠螺杆效率高(0.9~0.96),但对加工 要求高
3、扇形齿轮传动
优点:尾部尺寸小,有可能放下臂架保养 缺点:开式传动,制造安装麻烦
49 变幅机构 22
∴ P = G对 r 对 / R 2
对变幅机构的操作要求及注意事项
对变幅机构的操作要求及注意事项变幅机构是一种用于改变机械装置工作范围和承载能力的重要设备。
在实际运用中,对于变幅机构的操作要求和注意事项至关重要。
本文将详细介绍这些内容。
操作要求:1.了解变幅机构的结构和原理:在操作变幅机构之前,必须了解其结构和工作原理。
只有对变幅机构有全面的了解,才能正确操作和处理故障。
2.熟悉操作手册:在操作变幅机构之前,必须熟悉相关的操作手册。
操作手册包含了详细的操作步骤、安全事项和维护要求等内容,操作人员必须按照操作手册进行操作,确保操作的准确性和安全性。
3.严格遵守操作规程:在操作变幅机构时,必须严格遵守相关的操作规程。
例如,严禁超负荷使用变幅机构,禁止在变幅机构运行时进行任何维修和检查等。
4.操作人员必须具备专业知识和经验:操作变幅机构的人员必须具备相关的专业知识和经验。
只有具备这些能力,操作人员才能正确判断和处理机构故障,并采取适当的应对措施。
5.合理安排工作计划和过程:在操作变幅机构时,必须合理安排工作计划和过程。
例如,按照规定的工作程序进行操作,定期检查和维护变幅机构,确保其正常运行。
6.密切关注变幅机构的运行状态:在操作变幅机构时,必须密切关注其运行状态,随时观察和检查变幅机构的工作情况。
一旦发现异常,应及时采取措施,避免发生事故。
7.保持机房整洁和安全:在操作变幅机构时,必须保持机房整洁和安全。
例如,及时清理工作区域的杂物,保持机房内的空气流通,确保操作环境的良好。
8.严格遵守操作安全规范:在操作变幅机构时,必须严格遵守相关的安全规范。
例如,戴好安全帽、安全带和防护手套等,确保操作人员的人身安全。
注意事项:1.避免超负荷使用:变幅机构的承载能力是有限的,严禁超负荷使用。
在使用变幅机构之前,必须了解其额定承载能力,并在操作过程中严格遵守。
2.定期检查和维护:为了保证变幅机构的正常运行,必须定期进行检查和维护工作。
检查和维护包括润滑系统的检查、部件的紧固和更换、轴承的润滑和更换等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
W Pj 1000 60
②电机过载校验
T jc
W W4 D1 2i
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
③电机发热校验
Tre nm T jc 9550 K z
WD1 Tre KG 2i
西安建筑科技大学机电工程学院
图4 绳索牵引式小车变幅机构 1-电机;2-缓冲器;3-制动器;4-辅助风 机;5-行星摆线针轮减速器;6-卷筒;7卷筒轴;8-小车限位器
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
1)绳索牵引小车构造 组成:车架结构、滑轮、行走滚轮、导向轮、倍率滑轮 销轴等组成。 变幅小车车架结构焊接而成,有三角形框架式车架和矩 形框架式车架两大类 。
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
2)牵引计算
(1)牵引阻力计算
① 摩擦阻力
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
②坡度阻力
③惯性阻力
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
④迎风阻力
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
5.3.2 臂架摆动式变幅机构
1) 挠性传动变幅机构
2) 安全装置
①防后倾安全装置
②限速装置
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
图3 载荷自制式制动器 图2 离心式限速器 1、3-转动轮毂;2-摩擦片; 4-重块;5-弹簧;6-传动轴 1-传动轴;2-传动齿轮;3-棘 轮;4-定位件
⑤起升绳阻力
图9 起升绳阻力
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
⑥牵引绳下垂度引起的阻力
(2)稳定变幅最大牵引力
W W1 W2 2% W4 W5 W6
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
(3) 变幅静阻力
W W1 W2 1% W5
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
3)机构计算
(1) 正常工作时变幅机构的变幅力
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
5.3.3 运行小车式变幅机构
自行式 绳索牵引式
西安机的主要工作机构
5 塔式起重机的主要工作机构
5.3 变幅机构
5.3.1 变幅机构类型 工作 性质 非工作性变幅机构 工作性变幅机构 臂架摆动式变幅机构 刚性传动
运动 形式
挠性传动
运行小车式变幅机构 自行式 绳索牵引式
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
a)
b)
图1 塔式起重机的起升机构 a) 动臂式 b) 小车式
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
图5 牵引小车构造 1-滚轮;2-导向轮;3-起升绳导向滑轮;4-倍率滑轮销轴
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
图6 小车车架
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
变幅钢丝绳穿绕方式
图7 变幅绳穿绕方式
西安建筑科技大学机电工程学院
5 塔式起重机的主要工作机构
起升钢丝绳穿绕方式
为了变幅时保证重物作 水平移动,起升绳的终 端不能固定在运行小车 上,必须固定在起重臂 的端部。 b)起升绳长度长,但是 起到了支承起重臂的作 用,使水平臂架受力性 能改善。
图8 起升绳穿绕方式 a) 固定在起重机端部的绕法 b) 固定在起重机根部的绕法