基于STL的图遍历问题的解决
数据结构中的图的遍历算法
数据结构中的图的遍历算法图是一种非常重要且广泛应用的数据结构,它由顶点和边组成,可以用来表示各种实际问题,如社交网络、路线规划等。
图的遍历算法是对图中的所有顶点进行系统访问的方法,它可以用来查找、遍历和搜索图中的元素。
本文将介绍图的遍历算法的基本概念和常用的实现方法。
一、图的遍历算法概述图的遍历算法是指按照某种规则遍历图中的所有顶点,以便于查找、遍历和搜索图中的元素。
常用的图的遍历算法有深度优先搜索(DFS)和广度优先搜索(BFS)两种。
深度优先搜索(DFS)是一种先访问顶点的所有邻接顶点,再递归访问邻接顶点的邻接顶点的算法。
它以深度为优先级,一直向前走到不能继续为止,然后返回到前一个结点,继续向前走,直到遍历完整个图。
广度优先搜索(BFS)是一种先访问顶点的所有邻接顶点,再访问邻接顶点的邻接顶点,以此类推的算法。
它以广度为优先级,先访问离起始顶点最近的顶点,然后依次访问离起始顶点更远的顶点,直到遍历完整个图。
二、深度优先搜索(DFS)深度优先搜索是一种递归的搜索算法,它的基本思想是从图的某个顶点出发,沿着一条路径一直深入直到不能继续为止,然后返回到前一个结点,继续向前走。
具体实现时,可以使用递归或栈来保存需要访问的顶点。
以下是深度优先搜索的基本步骤:1. 选择一个起始顶点作为当前顶点,将其标记为已访问。
2. 访问当前顶点,并将其加入遍历结果。
3. 从当前顶点的未访问邻接顶点中选择一个作为下一个当前顶点,重复步骤2。
4. 如果当前顶点的所有邻接顶点都已访问,则返回到前一个顶点,重复步骤3。
5. 重复步骤4,直到遍历完整个图。
三、广度优先搜索(BFS)广度优先搜索是一种迭代的搜索算法,它的基本思想是从图的某个顶点出发,依次访问其所有未访问过的邻接顶点,然后再依次访问这些邻接顶点的未访问过的邻接顶点,直到遍历完整个图。
具体实现时,可以使用队列来保存需要访问的顶点。
以下是广度优先搜索的基本步骤:1. 选择一个起始顶点作为当前顶点,将其标记为已访问,并将其加入遍历结果。
图的遍历算法的基本思路

图的遍历算法的基本思路在计算机科学领域中,图是一种非常重要的数据结构,它被广泛应用于各种领域,包括计算机网络、机器学习、人工智能等等。
而图的遍历算法是图论中的一个基础概念,是解决许多图论问题的基础。
图的遍历算法是指从图的某一个节点开始,逐个访问该节点的相邻节点,并将这些节点标记为已访问,以便后续遍历时避免重复访问。
图的遍历算法主要有两种:深度优先遍历算法和广度优先遍历算法。
本文将对这两种遍历算法的思路和应用进行详细讲解。
一、深度优先遍历算法深度优先遍历算法又称为 DFS 遍历算法,它的主要思路是从图的某一个节点开始,递归地访问该节点的每一个相邻节点,如果该节点还没有被访问,那么就将其标记为已访问,并递归访问与该节点相邻的其他节点,直到没有未访问过的节点为止。
这里的“深度”指的是遍历算法首先探索到最深层的节点,然后再回溯到上层节点的过程。
DFS 遍历算法的应用非常广泛,比如:1. 找出一个图的连通分量;2. 判断一个图是否为二分图;3. 寻找一个图中的欧拉回路或欧拉通路;4. 寻找两个节点之间的所有路径等等。
深度优先遍历算法的代码实现如下:```pythonvisited = set()def dfs(graph, node):if node not in visited:visited.add(node)for neighbor in graph[node]:dfs(graph, neighbor)```二、广度优先遍历算法广度优先遍历算法又称为 BFS 遍历算法,它的主要思路是从图的某一个节点开始,依次访问该节点的相邻节点,并将它们依次加入到一个队列中,依次对队列中的节点进行访问,直到队列为空。
BFS 遍历算法的应用也非常广泛,比如:1. 实现图的最短路径算法;2. 判断一个图是否为一棵树;3. 实现拓扑排序等等。
广度优先遍历算法的代码实现如下:```pythonvisited = set()queue = []def bfs(graph, node):visited.add(node)queue.append(node)while queue:s = queue.pop(0)for neighbor in graph[s]:if neighbor not in visited:visited.add(neighbor)queue.append(neighbor)```三、深度优先遍历算法 vs 广度优先遍历算法虽然深度优先遍历算法和广度优先遍历算法都可以完成相同的任务,但它们的优劣势也不同。
c++ 最长路算法
c++ 最长路算法全文共四篇示例,供读者参考第一篇示例:长路径问题是图论中一个经典问题,在计算机科学领域中有着广泛的应用。
C++语言是一种高效且强大的编程语言,对于解决这类问题非常适用。
本文将介绍C++中的最长路径算法,包括算法原理、实现步骤以及应用场景等内容。
一、最长路径算法的原理最长路径算法是在图中寻找两个顶点之间的最长路径,即找到一条路径使得路径上的边权值之和最大。
在一个加权有向图中,最长路径算法可以用来解决许多实际问题,比如工程规划、网络路由等。
最长路径算法的原理是基于动态规划的思想。
我们可以使用动态规划来求解从源点到其他各个顶点的最长路径。
具体步骤如下:1. 初始化图中的各个顶点到源点的距离为负无穷大。
2. 从源点开始,按拓扑序进行遍历。
3. 对于每个顶点v,遍历其所有的邻接顶点u,更新u的距离为max(dist[u], dist[v] + weight(u, v))。
4. 重复以上步骤,直到所有顶点的距离不再变化为止。
通过以上步骤,我们可以求解出源点到其他各个顶点之间的最长路径。
下面我们来看一个简单的C++实现,实现一个求解最长路径的函数。
```cpp#include <iostream>#include <vector>#define INF INT_MAXusing namespace std;for (int i = 0; i < V; i++) {for (auto edge : adjList[i]) {int u = edge.first;int weight = edge.second;if (dist[i] + weight > dist[u]) {dist[u] = dist[i] + weight;}}}return dist;}adjList[0].push_back({1, 5});adjList[0].push_back({2, 3});adjList[1].push_back({3, 6});adjList[2].push_back({3, 2});adjList[2].push_back({4, 7});adjList[3].push_back({4, 4});adjList[4].push_back({5, 5});在以上代码中,我们定义了一个函数`longestPath`来计算最长路径,其中传入参数为邻接表、顶点数和源顶点。
图遍历算法
图遍历算法图遍历算法是一种基于图的搜索算法,用于从图中搜索指定的节点或路径。
图在计算机科学中是一种重要的数据结构,它可以用来表示一组复杂的关系。
图中的每个节点都是一个对象,而边则用来表示两个节点之间的关系。
图遍历算法类似于树遍历算法,其主要目的是从图中寻找某一节点或指定的路径。
图遍历算法的基本操作步骤1.图中的所有节点标记为未访问状态。
2. 从起始节点开始遍历,将当前节点标记为已访问状态。
3.查当前节点是否是目标节点,如果是则结束遍历,否则继续遍历。
4.查当前节点的相邻节点,如果有未访问的节点,则将其标记为已访问,并将其加入到待访问队列中。
5.复步骤3和步骤4,直到找到目标节点或遍历完整个图。
图遍历算法的应用场景图遍历算法主要用于图的搜索和路径查找。
它的应用场景有: 1.路算法:主要应用于地图导航、交通管理、机器人导航等场景,用于查找从指定的节点A到终点B的最优路径。
2.短路径算法:主要用于网络及其他复杂系统中,查找从起始节点到终点之间最短路径,也就是说,需要查找距离最短的路径,而不是按照一定顺序查找路径。
3.联分析算法:它是一种数据挖掘技术,用于挖掘分析大规模数据集合中被关联的结构和模式,包括聚类分析、关系挖掘、推荐系统等。
图遍历算法可以用于查找关联的数据,从而发现有益的模式和网络结构。
4.像处理:图像处理系统中,常常会使用图遍历算法来获取图像的各种特征,例如:特征提取、边缘检测、物体检测和分割等。
图遍历算法的性能图遍历算法的性能可以用时间复杂度和空间复杂度来表示,一般来说,图遍历算法的时间复杂度为 O(V+E)其中 V 为图中的节点数,E 为边的数目。
对于空间复杂度,一般会使用一个队列来保存待访问的节点,空间复杂度为 O(V) 。
总结图遍历算法是一种基于图的搜索算法,它主要用于搜索指定的节点或路径,并用于诸如寻路算法、最短路径算法、关联分析算法和图像处理等不同场景。
图遍历算法的时间复杂度为 O(V+E),空间复杂度为 O(V)因此,它适合于处理大型图,而不适用于小规模的图。
课程设计(论文)-基于BFS算法的图的遍历设计与实现
摘要本文采用图的邻接矩阵实现了最短路径问题中图的存储;采用队列实现了图的广度优先搜索(BFS),用类的成员函数实现了其各个功能。
本C++程序实现了图的最短路径存储及BFS遍历,采用Visual C++ 6.0的控制台工程和MFC工程分别实现了邻接矩阵在桌面上的的显示以及实现对图的广度遍历程序,通过对两种程序的测试结果表明:基于BFS算法的图的遍历算法原理正确,两种程序均能正确求解给定的图的遍历问题。
关键词:邻接矩阵;队列;广度优先搜索;控制台工程;MFC图形界面目录1需求分析 (1)2算法基本原理 (2)2.1邻接矩阵 (2)2.2图的遍历——广度优先搜索(BFS) (3)3类设计 (4)3.1类的概述 (4)3.2类的接口设计 (4)3.3类的实现 (4)4基于控制台的应用程序 (9)4.1主函数设计 .................................................................................... 错误!未定义书签。
4.2运行结果及分析 ............................................................................ 错误!未定义书签。
5基于MFC的应用程序. (9)5.1图形界面设计 (11)5.2程序代码设计 (14)5.3运行结果及分析 (19)结论 (21)参考文献 (22)1需求分析(1)图的应用和研究可追溯到18世纪。
1736年,被称为图论之父的欧拉解决了哥尼斯堡(Konigsberg)问题,从而奠定了图论这门学科及其应用的基础。
(2)图作为一种非线性数据结构,被广泛应用与多个技术领域,诸如系统工程、化学分析、统计力学、遗传学、控制论、人工智能、编译系统等领域,在这些技术领域中把图结构作为解决的数学手段之一。
(3)程序测试数据来自姜学军李筠主编的《数据结构(C语言描述)》中,所选的无向图是:图12 算法基本原理2.1 邻接矩阵邻接矩阵是表示节点之间的相邻接关系的矩阵。
数据结构课程设计-图的遍历

数据结构课程设计-图的遍历1. 介绍图是一种非线性数据结构,它由节点和边组成。
在图中,节点可以表示任何对象,而边则表示节点之间的关系。
图可以用于表示许多现实世界中的问题,例如社交网络、电路板和道路网络。
图遍历是图算法的基础,它是指从图的一个特定节点出发,按照一定顺序访问图中所有节点的过程。
在这篇文章中,我们将讨论基本的图遍历算法,包括深度优先遍历(DFS)和广度优先遍历(BFS)。
2. 深度优先遍历 (DFS)深度优先遍历是一种用于遍历或搜索树或图的算法。
在深度优先遍历中,我们先访问一个顶点,然后沿着这个顶点下一条未访问的边走到下一个顶点,直到遇到一个没有未访问的邻居为止。
然后我们回溯到之前的节点,并访问该节点的另一个未访问的邻居。
我们重复这个过程,直到所有的节点都被访问。
在深度优先遍历中,每个节点仅被访问一次。
深度优先遍历有两种实现方式:递归实现和迭代实现。
递归实现方式是深度优先遍历的传统实现方式。
当对一个节点进行深度优先遍历时,我们首先访问这个节点,然后递归地遍历它的每一个邻居节点。
这个过程会一直持续到当前节点的所有邻居节点都被访问到为止。
下面是递归实现方式的伪代码:void DFS(Node node){visit(node);for (Node neighbor : node.neighbors) {if (!neighbor.visited) {DFS(neighbor);}}}另一种实现方式是使用栈来模拟递归过程,称为迭代实现方式。
在这种实现方式中,我们使用深度优先搜索的方式逐步遍历节点。
在遍历过程中,我们将每个节点的邻居节点加入到栈中,以便后续处理。
下面是迭代实现方式的伪代码:void DFS(Node node){Stack stack = new Stack();stack.push(node);while (!stack.isEmpty()) {Node currentNode = stack.pop();if (!currentNode.visited) {visit(currentNode);for (Node neighbor : currentNode.neighbors) {stack.push(neighbor);}}}}3. 广度优先遍历 (BFS)广度优先遍历是另一种图遍历算法。
数学建模遍历算法原理

数学建模遍历算法原理数学建模是一种运用数学方法解决实际问题的过程,而遍历算法则是其中一种常用的求解方法。
遍历算法的原理是通过遍历问题的所有可能解空间,从中找到满足特定条件的解。
本文将详细介绍遍历算法的原理及其应用领域。
一、遍历算法的原理遍历算法是一种通过穷举的方式寻找问题解的方法。
它的基本原理是将问题的解空间划分为若干个子空间,然后按照一定的顺序遍历每个子空间,直到找到满足特定条件的解或遍历完所有可能的解空间。
具体来说,遍历算法通常包括以下几个步骤:1. 确定问题的解空间:将问题的解空间划分为若干个子空间,每个子空间对应一个可能的解。
2. 确定遍历顺序:确定遍历子空间的顺序,可以按照从左到右、从上到下等方式进行。
3. 遍历每个子空间:按照确定的顺序遍历每个子空间,检查是否满足特定条件。
4. 判断是否满足条件:对于每个子空间,判断是否满足特定条件。
如果满足条件,则找到一个解;如果不满足,则继续遍历其他子空间。
5. 遍历完所有子空间:直到遍历完所有子空间,或者找到满足条件的解为止。
二、遍历算法的应用领域遍历算法在实际问题中有着广泛的应用。
下面介绍几个常见的应用领域。
1. 图论:在图论中,遍历算法常用于寻找图的连通分量、最短路径、最小生成树等问题。
例如,深度优先搜索和广度优先搜索就是两种常用的遍历算法。
2. 组合优化:组合优化问题是指在给定的一组元素中选取满足特定条件的子集。
遍历算法可以用于穷举所有可能的子集,以找到最优解。
例如,旅行商问题就是一个经典的组合优化问题,可以使用遍历算法求解。
3. 排列组合:排列组合问题是指在一组元素中按照一定的规则进行排列或组合的问题。
遍历算法可以用于穷举所有可能的排列或组合,以找到满足特定条件的解。
例如,八皇后问题就是一个经典的排列组合问题,可以使用遍历算法求解。
4. 线性规划:线性规划是一种在给定的线性约束条件下,求解线性目标函数最优值的问题。
遍历算法可以用于穷举所有可能的解,以找到最优解。
CC第33讲——解决批量删除STLMap元素时出现的挂死现象

CC第33讲——解决批量删除STLMap元素时出现的挂死现象今天使用STL Map编写一个小工具程序,通过遍历方式批量删除记录时,程序出现了挂死现象,这里将解决方法写出来,希望对大家有帮助。
为了便于大家阅读,先介绍一下STL和Map的基础知识。
1、STL介绍STL,是Standard Template Library的缩写,即标准模板库。
STL使用C++的模板语法,通过泛型编程技术,实现了队列、栈、映射等数据结构,支持用户将自定义数据应用到这些数据结构。
STL由惠普公司三个员工开发完成,最初使用C++语言实现,STL 出现后得到了广泛使用,现在已经成为C++标准库的组成部分。
2、STL的组成根据官方描述(/the-c-standard-template-library-stl/),STL由四部分组成:•算法•容器•函数•迭代器算法:提供对数据的不同操作的方法,例如我们常用的排序、查找;容器:用于保存对象和数据,常见的有vector、list、queue、stack、set、map;函数:STL支持函数对象,重载函数调用操作符;迭代器:用于访问值的序列。
3、STL Map介绍Map是我们最常用的数据结构之一,我们一般将它翻译成“映射”,用于保存一组键值对(key-value pair)。
Map底层使用红黑树(R-B Tree)存储数据,红黑树是一种接近平衡的二叉树。
《算法导论》这本书指出,红黑树检索的时间复杂度为Log2(N),这是比较高效的算法,例如:•如果map包含64个记录,查询某个记录最多只需要对比6次;•包含1000个记录的map,查询某个记录最多只需要搜索10次;•包含100万个记录的map,查询某个记录最多只需要搜索20次。
我们利用map,可以很轻松实现检索功能。
例如下面的程序用map保存学生的姓名和年龄,并实现了所有记录的遍历功能:#include <stdio.h>#include <string>#include <map>#include <iterator> int main(){ std::map<std::string, int> students; students.insert(std::pair<std::string, int>('Tom', 23)); students.insert(std::pair<std::string, int>('Jenny', 16)); students.insert(std::pair<std::string, int>('Jack', 19)); students.insert(std::pair<std::string, int>('Lisa', 22)); students.insert(std::pair<std::string, int>('Mary', 18)); students.insert(std::pair<std::string, int>('Sunny', 20)); students.insert(std::pair<std::string, int>('Betty', 19)); students.insert(std::pair<std::string, int>('Smith', 17)); students.insert(std::pair<std::string, int>('Joy', 21)); students.insert(std::pair<std::string, int>('Comma', 18)); students.insert(std::pair<std::string, int>('Ben', 24)); std::map<std::string, int>::iterator iter; for (iter=students.begin(); iter!=students.end(); iter++) { printf('name: %s, age: %d\n',iter->first.c_str(), iter->second); } return 0;}程序的运行情况如下:4、STL Map批量删除功能的实现由于Map使用红黑树,我们不容易知道数据的存放顺序,所以我们在批量删除数据时,需要借助迭代器。
图遍历的演示实习报告

图遍历的演示题目:诸多涉及图上操作的算法都是以图的遍历操作为基础的。
试设计一种程序,演示在连通和非连通的无向图上访问全部结点的操作一、需求分析1、以邻接多重表为存储构造;2、实现连通和非连通的无向图的深度优先和广度优先遍历;3、以顾客指定的结点为起点,分别输出每种遍历下的结点访问序列和生成树的边集;二、概要设计1、设定图的抽象数据类型:ADT Graph{数据对象 V:V 是含有相似特性的数据元素的集合,称为点集.数据关系 R:R={VR}VR={(v,w)|v,w 属于V,(v,w)表达 v 和w 之间存在的途径}基本操作P:CreatGraph(&G,V,VR)初始条件:V 是图的顶点集,VR 是图中弧的集合.操作成果:按 V 和 VR 是定义构造图 G.DestroyGraph(&G)初始条件:图 G 存在操作成果:销毁图 GLocateVex(G,u)初始条件: 图 G 存在,u 和G 中顶点有相似的特性操作成果:若图 G 中存在顶点 u,则返回该顶点在图中的位置;否则返回其它信息GetVex(G,v)初始条件: 图 G 存在,v 是G 中顶点操作成果:返回 v 的值FirstAjvex(G,v)初始条件: 图 G 存在,v 是G 中顶点操作成果:返回 v 的第一种邻接顶点,若顶在图中没有邻接顶点,则返回为空NextAjvex(G,v,w)初始条件: 图 G 存在,v 是G 中顶点,w 是v 的邻接顶点操作成果:返回 v 的下一种邻接顶点,若 w 是v 的最后一种邻接顶点,则返回空DeleteVexx(&G,v)初始条件: 图 G 存在,v 是 G 中顶点操作成果:删除顶点 v 已经其有关的弧DFSTraverse(G,visit())初始条件: 图 G 存在,visit 的顶点的应用函数操作成果: 对图进行深度优先遍历,在遍历过程中对每个结点调用 visit 函数一次, 一旦 visit 失败,则操作失败BFSTraverse(G,visit())初始条件: 图 G 存在,visit 的顶点的应用函数操作成果:对图进行广度优先遍历,在遍历过程中对每个结点调用 visit 函数一次,一旦 visit 失败,则操作失败}ADT Graph2、设定栈的抽象数据类型:ADT Stack{数据对象:D={ai | ai∈CharSet,i=1,2,……,n,n≥0}数据关系:R1={<ai-1,ai> | ai-1,ai∈D,i=2,……,n}基本操作:InitStack(&S)操作成果:构造一种空栈S。
数据结构与算法 图的遍历与连通性
数据结构与算法图的遍历与连通性数据结构与算法:图的遍历与连通性在计算机科学的广袤领域中,数据结构与算法犹如基石,支撑着各种复杂系统的构建和高效运行。
其中,图作为一种重要的数据结构,其遍历和连通性问题是理解和应用图的关键所在。
让我们先从图的基本概念说起。
图是由顶点(vertex)和边(edge)组成的一种数据结构。
顶点代表着图中的元素,而边则表示顶点之间的关系。
图可以分为有向图和无向图。
在有向图中,边是有方向的,从一个顶点指向另一个顶点;而在无向图中,边没有方向,两个顶点之间的关系是相互的。
图的遍历,简单来说,就是按照一定的规则访问图中的每个顶点。
常见的图遍历算法有深度优先遍历(DepthFirst Search,简称 DFS)和广度优先遍历(BreadthFirst Search,简称 BFS)。
深度优先遍历就像是一个勇敢的探险家,一头扎进图的深处。
它从某个起始顶点开始,沿着一条路径尽可能地深入探索,直到无法前进,然后回溯到上一个还有未探索分支的顶点,继续探索其他分支。
这种遍历方式类似于在迷宫中选择一条路一直走到底,直到碰壁再回头。
我们通过一个简单的例子来理解深度优先遍历。
假设有一个无向图,顶点分别为 A、B、C、D、E,边的关系为 A B、A C、B D、C E。
从顶点 A 开始进行深度优先遍历,首先访问 A,然后选择与 A 相邻的B 进行访问,接着访问与 B 相邻且未被访问过的 D,因为 D 没有其他未访问的相邻顶点,所以回溯到B。
此时B 的其他相邻顶点都已访问,回溯到 A,再访问与 A 相邻且未被访问过的 C,接着访问 C 的相邻顶点 E。
这样就完成了整个图的深度优先遍历。
广度优先遍历则像是一个谨慎的观察者,逐层地扫描图。
它从起始顶点开始,先访问所有与起始顶点距离为 1 的顶点,然后再依次访问距离为 2、3……的顶点。
可以想象成是以起始顶点为中心,一圈一圈地向外扩展。
还是以上面的图为例,从顶点 A 开始进行广度优先遍历。
数据结构实验报告图的遍历
数据结构实验报告图的遍历数据结构实验报告:图的遍历引言在计算机科学中,图是一种重要的数据结构,它由节点和边组成,用于表示不同实体之间的关系。
图的遍历是一种重要的操作,它可以帮助我们了解图中节点之间的连接关系,以及找到特定节点的路径。
在本实验中,我们将讨论图的遍历算法,并通过实验验证其正确性和效率。
深度优先搜索(DFS)深度优先搜索是一种常用的图遍历算法,它通过递归或栈的方式来遍历图中的节点。
在实验中,我们实现了深度优先搜索算法,并对其进行了测试。
实验结果表明,深度优先搜索算法能够正确地遍历图中的所有节点,并找到指定节点的路径。
此外,我们还对算法的时间复杂度进行了分析,验证了其在不同规模图上的性能表现。
广度优先搜索(BFS)广度优先搜索是另一种常用的图遍历算法,它通过队列的方式来遍历图中的节点。
在实验中,我们也实现了广度优先搜索算法,并对其进行了测试。
实验结果显示,广度优先搜索算法同样能够正确地遍历图中的所有节点,并找到指定节点的路径。
我们还对算法的时间复杂度进行了分析,发现其在不同规模图上的性能表现与深度优先搜索算法相近。
实验结论通过本次实验,我们深入了解了图的遍历算法,并验证了其在不同规模图上的正确性和效率。
我们发现深度优先搜索和广度优先搜索算法都能够很好地应用于图的遍历操作,且在不同情况下都有良好的性能表现。
这些算法的实现和测试为我们进一步深入研究图的相关问题提供了重要的基础。
总结图的遍历是图算法中的重要操作,它为我们提供了了解图结构和节点之间关系的重要手段。
本次实验中,我们实现并测试了深度优先搜索和广度优先搜索算法,验证了它们的正确性和效率。
我们相信这些算法的研究和应用将为我们在图相关问题的研究中提供重要的帮助。
stl::map遍历并删除元素的几种方法
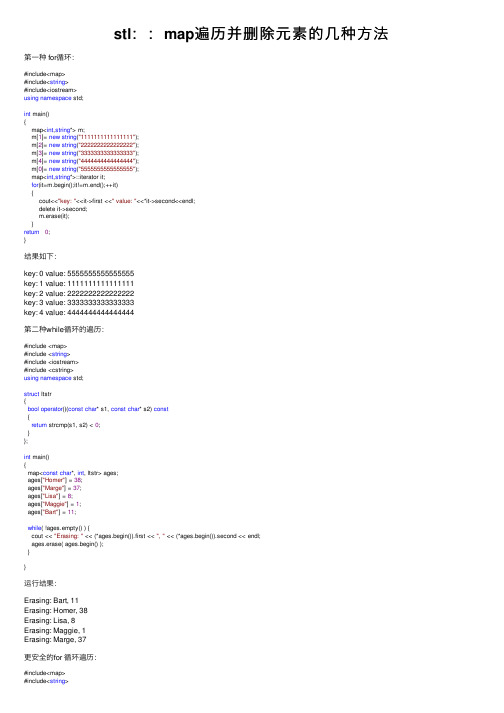
stl::map遍历并删除元素的⼏种⽅法第⼀种 for循环:#include<map>#include<string>#include<iostream>using namespace std;int main(){map<int,string*> m;m[1]= new string("1111111111111111");m[2]= new string("2222222222222222");m[3]= new string("3333333333333333");m[4]= new string("4444444444444444");m[0]= new string("5555555555555555");map<int,string*>::iterator it;for(it=m.begin();it!=m.end();++it){cout<<"key: "<<it->first <<" value: "<<*it->second<<endl;delete it->second;m.erase(it);}return0;}结果如下:key: 0 value: 5555555555555555key: 1 value: 1111111111111111key: 2 value: 2222222222222222key: 3 value: 3333333333333333key: 4 value: 4444444444444444第⼆种while循环的遍历:#include <map>#include <string>#include <iostream>#include <cstring>using namespace std;struct ltstr{bool operator()(const char* s1, const char* s2) const{return strcmp(s1, s2) < 0;}};int main(){map<const char*, int, ltstr> ages;ages["Homer"] = 38;ages["Marge"] = 37;ages["Lisa"] = 8;ages["Maggie"] = 1;ages["Bart"] = 11;while( !ages.empty() ) {cout << "Erasing: " << (*ages.begin()).first << ", " << (*ages.begin()).second << endl;ages.erase( ages.begin() );}}运⾏结果:Erasing: Bart, 11Erasing: Homer, 38Erasing: Lisa, 8Erasing: Maggie, 1Erasing: Marge, 37更安全的for 循环遍历:#include<map>#include<string>#include<iostream>using namespace std;int main(){map<int,string*> m;m[1]= new string("1111111111111111");m[2]= new string("2222222222222222");m[3]= new string("3333333333333333");m[4]= new string("4444444444444444");m[0]= new string("5555555555555555");map<int,string*>::iterator it;for(it=m.begin();it!=m.end();){cout<<"key: "<<it->first <<" value: "<<*it->second<<endl;delete it->second;m.erase(it++);}return0;}运⾏结果与第⼀种⽅式相同,不过这种删除⽅式也是STL源码⼀书中推荐的⽅式,分析 m.erase(it++)语句,map中在删除iter的时候,先将iter做缓存,然后执⾏iter++使之指向下⼀个结点,再进⼊erase函数体中执⾏删除操作,删除时使⽤的iter就是缓存下来的iter(也就是当前iter(做了加操作之后的iter)所指向结点的上⼀个结点)。
如何优雅的传递stl容器作为函数参数来实现元素插入和遍历?

如何优雅的传递stl容器作为函数参数来实现元素插⼊和遍历?问题背景开始正⽂之前,做⼀些背景铺垫,⽅便读者了解我的⼯程需求。
我的项⽬是⼀个客户端消息分发中⼼,在连接上消息后台后,后台会不定时的给我推送⼀些消息,我再将它们转发给本机的其它桌⾯产品去做显⽰。
后台为了保证消息⼀定可以推到客户端,它采取了⼀种重复推送的策略,也就是说,每次当我重新连接上后台时,后台会把⼀段时间内的消息都推给我、⽽不论这些消息之前是否已经推送过,如果我不加处理的直接推给产品,可能造成同⼀个消息重复展⽰多次的问题。
为此,我在接收到消息后,会将它们保存在进程中的⼀个容器中,当有新消息到达时,会先在这个容器⾥检查有没有收到这条消息,如果有,就不再转发。
1namespace GCM {2class server_msg_t3 {4public:5void dump(char const* prompt);67 std::string appname;8 std::string uid;9 std::string msgid;10 time_t recv_first = 0;11 time_t recv_last = 0;12int recv_cnt = 0;13 };1415class WorkEngine16 {17public:18 WorkEngine();19 ~WorkEngine();2021private:22// to avoid server push duplicate messages to same client.23// note this instance is only accessed when single connection to server arrives message, so no lock needed..24 std::vector<server_msg_t> m_svrmsgs;25 };26 }上⾯的是经过简化以后的代码,m_svrmsgs 成员存储的就是接收到的所有的后台消息,server_msg_t 代表的就是⼀个后台消息,appname、uid ⽤来定位发给哪个产品的哪个实例;msgid ⽤来唯⼀的标识⼀个消息;recv_first、recv_last、recv_cnt 分别表⽰消息接收的⾸次时间、最后时间以及重复接收次数。
3D打印中STL模型常见的错误及修复方法

引言:STL(Stereo Lithography)文件是CAD 系统和3D 打印系统之间常用的数据交换文件。
CAD 实体模型一般是由多张曲面片剪切拼接组合而成,由于操作的不精确性,造型生成的CAD 实体可能存在一些缺陷,这会影响后续的三角化过程,生成不正确的STL 文件。
而对于正确的CAD 实体模型,由于系统精度差异和大曲率曲面三角化算法的不合理,也可能使生成的STL 文件产生缺陷,使得STL 文件无法进行进一步的切片处理,从而不能生成3D 打印过程需要的路径文件[1]。
为了保证正确的分层切片,一般要在切片处理之前对STL 文件进行缺陷的检测和修复。
一、转换成STL 模型后常见的错误类型在CAD 模型转换成STL 模型的过程中可能会出现很多错误,直接影响到后续的切片和数据处理工作,所以需要对转换的结果进行错误检查,深究其原因并针对性的修复。
1.逆向法向量。
也就是三角形面片三条边的转向发生逆转,即违反了STL 文件的右手规则。
产生的原因主要是在生成STL 文件时,三角形面片的顶点记录顺序错误。
2.孔洞。
孔洞是STL 文件中最常见的错误,它是因丢失三角形面片而造成的,特别是一些大曲率曲面组成的模型在进行三角化处理时,如果拼接该模型的三角形非常小或者数目非常多,就很容易丢失小三角形,导致孔洞错误。
3.裂缝。
裂缝主要是在转换中数据不准确或取舍的误差而导致的,孔洞和裂缝都是违反了STL 文件的充满规则。
4.面片重叠。
在三维空间中,三角网格模型中顶点的数值是以浮点数表示的。
由于软件的转换精度太低,三角化算法中需要四舍五入对顶点数值进行调整而产生误差,导致顶点的漂移。
5.多边共线。
3个以上的边共线,并且每一条边只有一个邻接三角形。
这是一种拓扑结构错误,是由于不合理的三角化算法造成的。
二、STL 模型常见错误的修复方法1.错误检查方法要修复STL 文件,首先要检查出STL 文件的错误,确定错误的类型、分布和数量。
湖南大学数据结构试验4图的遍历问题

HUNAN UNIVERSITY 课程实习报告题目:图的遍历问题学生姓名刘乐学生学号20080820208专业班级通信工程2班指导老师朱宁波完成日期2010年5月17日一、问题描述:从图中某个顶点出发访问图中所有顶点,且使得每一顶点仅被访问一次,这个过程称为图的遍历。
图的遍历是从图中某个顶点出发,沿着某条搜索路径对图中其余每个顶点进行访问, 并且使图中的每个顶点仅被访问一次的过程。
二、基本要求:1、实现无向图的深度优先遍历和广度优先遍历。
2、分别输出每种遍历下的结点访问序列.从图中某个顶点出发,沿着某条搜索路径对图中每个顶点各做一次且仅做一次访问。
它是许多图的算法的基础。
三、实验主要模块构造思想:深度优先搜索的过程a 基本思想:首先访问图中某一个指定的出发点Vi;然后任选一个与顶点Vi相邻的未被访问过的顶点Vj;以Vj为新的出发点继续进行深度优先搜索,直至图中所有顶点均被访问过。
b具体过程:设x是当前被访问顶点,在对x做过访问标记后,选择一条从x出发的未检测过的边(x,y)。
若发现顶点y已访问过,则重新选择另一条从x出发的未检测过的边,否则沿边(x,y)到达未曾访问过的y,对y访问并将其标记为已访问过;然后从y开始搜索,直到搜索完从y出发的所有路径,即访问完所有从y 出发可达的顶点之后,才回溯到顶点x,并且再选择一条从x出发的未检测过的边。
上述过程直至从x出发的所有边都已检测过为止。
此时,若x不是源点,则回溯到在x之前被访问过的顶点;否则图中所有和源点有路径相通的顶点(即从源点可达的所有顶点)都已被访问过,若图G是连通图,则遍历过程结束,否则继续选择一个尚未被访问的顶点作为新源点,进行新的搜索过程。
广度优先遍历(Breadth-First Traverse):特点:尽可能先从指定的出发点,横向地访问图中各个顶点。
1.广度优先遍历的定义在访问了起始点之后,首先依次访问起始点的各个邻接点,然后依次访问这些顶点中未被访问过的邻接点.依此类推,直到所有被访问到的顶点的邻接点都被访问过为止.2. 广度优先搜索的过程a算法基本思想:首先访问图中某一指定的出发点Vi;然后依次访问Vi的所有接点Vi1,Vi2…Vit;再次访问Vi1,Vi2…,Vit的邻接点中未经访问过的顶点,依此类推,直到图中所有顶点均被访问为止。
C++STL常用遍历算法
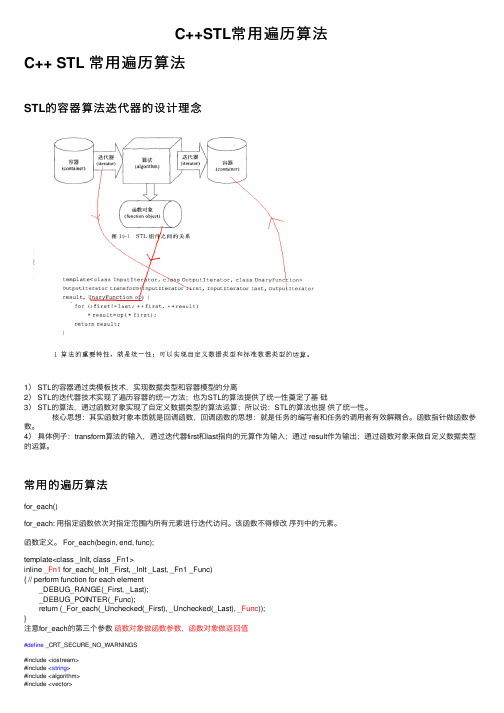
C++STL常⽤遍历算法C++ STL 常⽤遍历算法STL的容器算法迭代器的设计理念1) STL的容器通过类模板技术,实现数据类型和容器模型的分离2) STL的迭代器技术实现了遍历容器的统⼀⽅法;也为STL的算法提供了统⼀性奠定了基础3) STL的算法,通过函数对象实现了⾃定义数据类型的算法运算;所以说:STL的算法也提供了统⼀性。
核⼼思想:其实函数对象本质就是回调函数,回调函数的思想:就是任务的编写者和任务的调⽤者有效解耦合。
函数指针做函数参数。
4)具体例⼦:transform算法的输⼊,通过迭代器first和last指向的元算作为输⼊;通过 result作为输出;通过函数对象来做⾃定义数据类型的运算。
常⽤的遍历算法for_each()for_each: ⽤指定函数依次对指定范围内所有元素进⾏迭代访问。
该函数不得修改序列中的元素。
函数定义。
For_each(begin, end, func);template<class _InIt, class _Fn1>inline _Fn1 for_each(_InIt _First, _InIt _Last, _Fn1 _Func){ // perform function for each element_DEBUG_RANGE(_First, _Last);_DEBUG_POINTER(_Func);return (_For_each(_Unchecked(_First), _Unchecked(_Last), _Func));}注意for_each的第三个参数函数对象做函数参数,函数对象做返回值#define _CRT_SECURE_NO_WARNINGS#include <iostream>#include <string>#include <algorithm>#include <vector>using namespace std;class CMyShow{public:CMyShow(){num = 0;}void operator()(const int &iItem){num ++;cout << iItem;}void printCount(){cout << "num:" << num << endl;}private:int num;};void show(const int &iItem){cout << iItem;}void mytest(){int iArray[] = {0,1,2,3,4};vector<int> vecInt(iArray, iArray+sizeof(iArray)/sizeof(iArray[0]));for_each(vecInt.begin(), vecInt.end(), show); // 结果打印出0 1 2 3 4CMyShow show1 = for_each(vecInt.begin(), vecInt.end(), CMyShow());cout << endl;show1.printCount(); //显⽰对象被调⽤的次数return;}int main(){mytest();system("pause");return0;}transform()transform: 与for_each类似,遍历所有元素,但可对容器的元素进⾏修改transform()算法有两种形式:transform(b1, e1, b2, op)transform(b1, e1, b2, b3, op)template<class _InIt, class _OutIt, class _Fn1>inline _OutIt transform(_InIt _First, _InIt _Last, _OutIt _Dest, _Fn1 _Func)transform()的作⽤例如:可以⼀个容器的元素,通过op,变换到另⼀个容器中(同⼀个容器中)也可以把两个容器的元素,通过op,变换到另⼀个容器中注意:1.如果⽬标与源相同,transform()就和for_each()⼀样。
C++STLlist遍历删除出错解决方案
C++STLlist遍历删除出错解决⽅案C++ STL list 遍历删除崩溃错误⽤法⼀下⾯这种⽤法会在for的地⽅崩溃,分析第⼀次for循环的时候 it=0,当t.erase(it)执⾏完成之后 it就变成了 -17891602表明it不能再作为迭代器进⾏运算,⾃然会报错。
#include <map>#include <list>using namespace std;typedef std::list<int > TESTLIST;int _tmain(int argc, _TCHAR* argv[]){TESTLIST t;for (int i = 0; i < 10;i++){t.push_back(i);}for (TESTLIST::iterator it = t.begin(); it != t.end();){t.erase(it);it++;}return 0;}错误⽤法⼆下⾯这种⽤法出现的错误与错误⼀相同#include <map>#include <list>using namespace std;typedef std::list<int > TESTLIST;int _tmain(int argc, _TCHAR* argv[]){TESTLIST t;for (int i = 0; i < 10;i++){t.push_back(i);}for (TESTLIST::iterator it = t.begin(); it != t.end();it++){t.erase(it);}return 0;}错误⽤法三下⾯这种⽤法以为不it++就不会有事,其实他们的错误都⼀样,那就是t.erase(it)之后 it已经是⾮迭代量,⾃然不能作为迭代操作#include "stdafx.h"#include <map>#include <list>using namespace std;typedef std::list<int > TESTLIST;int _tmain(int argc, _TCHAR* argv[]){TESTLIST t;for (int i = 0; i < 10;i++){t.push_back(i);}for (TESTLIST::iterator it = t.begin(); it != t.end();){t.erase(it);}return 0;}正确⽤法#include <map>#include <list>using namespace std;typedef std::list<int > TESTLIST;int _tmain(int argc, _TCHAR* argv[]){TESTLIST t;for (int i = 0; i < 10;i++){t.push_back(i);}for (TESTLIST::iterator it = t.begin(); it != t.end();){t.erase(it++);}return 0;}感谢阅读,希望能帮助到⼤家,谢谢⼤家对本站的⽀持!。
基于STL的图遍历问题的解决

基于STL的图遍历问题的解决
炎士涛;郭晓娟;王全蕊
【期刊名称】《新乡学院学报(自然科学版)》
【年(卷),期】2009(026)001
【摘要】讨论了对图的遍历问题的解决方法,解决图的遍历问题的最终目的在于通过遍历得到点之间的最短距离,这就需要对遍历中经过的节点权值进行比较,遍历所有途径得到最优结果.
【总页数】2页(P50-51)
【作者】炎士涛;郭晓娟;王全蕊
【作者单位】河南科技学院,信息工程学院,河南,新乡,453000;河南科技学院,信息工程学院,河南,新乡,453000;河南科技学院,信息工程学院,河南,新乡,453000
【正文语种】中文
【中图分类】TP311
【相关文献】
1.基于有向图遍历算法的担保圈风险监测预警系统研究——从商业银行的视角出发[J], 威海银监分局担保圈风险研究课题组
2.基于全局图遍历的加权频繁模式研究 [J], 王栓杰;李华;陈智博
3.基于协议状态图遍历的RTSP协议漏洞挖掘 [J], 李佳莉;陈永乐;李志;孙利民
4.基于STL的图遍历问题的解决 [J], 炎士涛;郭晓娟;王全蕊
5.基于图遍历的计算DEM数据洪水淹没范围的算法 [J], 王思雪; 李英成; 刘沛; 耿中元; 孙新博
因版权原因,仅展示原文概要,查看原文内容请购买。
基于二叉树的STL冗余数据去除
基于二叉树的STL冗余数据去除
陈波;张红梅;江颉;陈志杨
【期刊名称】《计算机应用》
【年(卷),期】2005(25)B12
【摘要】STL数据是CAD系统中描述物体的常用格式。
由于STL数据中包含大量的冗余数据,因此在后续CAD系统利用中需要首先将这些数据剔除以简化算法并提高效率。
本文针对STL的数据冗余剔除问题剔除了一种基于二叉树结构的数据快速剔除方法,该方法与简单的坐标比较方法比较明显地提高了数据处理效率,有利于STL模型数据在CAD系统中的应用。
【总页数】2页(P205-206)
【作者】陈波;张红梅;江颉;陈志杨
【作者单位】浙江工业大学软件学院,浙江杭州310014;宁波工程学院电信学院,浙江宁波315010
【正文语种】中文
【中图分类】TP391.72
【相关文献】
1.基于遍历二叉树的方法判断完全二叉树 [J], 朱涛
2.基于NCRE的二叉树及二叉树遍历教学探索 [J], 李晓
3.基于二叉树的STL冗余数据去除 [J], 陈波;张红梅;江颉;陈志杨
4.非对齐分布冗余数据自适应快速去除方法仿真 [J], 程艳艳
5.基于STLS模型的空气质量生态价值估算——以云南省为例 [J], 刘月;韩爱华;邹苗苗
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第26卷 第1期
V ol.26 N o.1
新乡学院学报(自然科学版)
Journal of Xinx iang U niv ersity (N atural Science Editio n)
2009年2月Feb.2009
基于ST L 的图遍历问题的解决
*
炎士涛,郭晓娟,王全蕊
(河南科技学院信息工程学院,河南新乡453000)
摘 要:讨论了对图的遍历问题的解决方法,解决图的遍历问题的最终目的在于通过遍历得到点之间的最短距离,这就需要对遍历中经过的节点权值进行比较,遍历所有途径得到最优结果。
关键词:广度优先搜索;深度优先搜索;ST L 中图分类号:T P311
文献标志码:A 文章编号:1674-3326(2009)01-0050-02
Solving Problem of Traversing Graph Based on STL
Y AN Sh-i tao,GUO Xiao -juan,WANG Quan -rui
(Colleg e o f Informat ion Eng ineering ,H enan Institute of Science and T echnolog y,
X inxiang 453000,China)
Abstract:T he discussio n o n the issue o f the t raver sing g raph settlement is designed to g et the shor test distance betw een points thr ough accessing all points,w e need to co mpar e all the node v alue and tr aver se all channels to g et the o pt imal r esults.
Key words:D epth -fir st sear ch;Br eadth -fir st sea rch;ST L (Standa rd T emplate L ibrar y)
0引言
图的遍历问题,就是从图中某个顶点出发访遍图中其余顶点,并且使图中的每个顶点仅被访问一
次的过程。
遍历图的过程实质上是通过边或弧对每个顶点查找其邻接点的过程,主要使用广度优先搜索和深度优先搜索结合的方法,两者不同之处在于对顶点访问的顺序不同。
ST L(标准模板库)[1]是C ++标准库的最重要组成部分,是一个包罗算法和数据结构的软件框架,其提供的数据结构和算法对解决这类问题非常方便。
1算法设计
下面将介绍解决问题的方法,采用Visual C
++平台编译和C ++语言实现。
1.1数据结构的构造
广度优先算法中使用的节点结构体包括节点的坐标X ,Y 和到达该节点的距离。
typedef struct {int msortNumber;int mbodyEnergy;
set <int >setFindedQueue;}DFSNODE;DFSNODE
dfsNode1,dfsNode2;typedef struct {int x ;int y ;int mdistanc e;}NODE;NODE newnode,oldnode 。
1.2广度优先算法求出所有宝藏间距离
使用二维数组表示/寻找宝藏0问题的迷宫的通路,在有宝藏的位置标记到达该点时获取的体力值。
传入参数为起点和终点的坐标值,通过算法能够求出此两点间的最小距离。
在算法中使用VECT OR
[2]
数据结构作为队列,其存放数据为结构
体,包含一个位置的X ,Y 坐标以及到达该位置的距离。
所以,将入口坐标、N 个宝藏的坐标以及出口的坐标依次作为参数调用BFS 过程,就可以得到各个宝藏、入口、出口之间的最小距离。
在此过程中可以做一个判断,如果2个宝藏之间没有可通的路,即调用BFS 时,不能得到距离值,就说明不能到达所有宝藏且走出迷宫,输出提示信息,结束程序。
具体过程是:1)初始化临时二维数组S1,可通过的位置赋
#
50#*
收稿日期:2008-12-26 修回日期:2009-01-17 作者简介:炎士涛(1977)),男,河南新乡人。
讲师,硕士,研究方向:遗传算法。
E -mail:jacky sev en1@163.co m 。
值为1,有宝藏位置赋值为到达该节点的体力值,不可通过的位置初始化为0,初始化标志变量P为false。
2)定义一个结构体变量OLDNODE,其X,Y 值为传入起点位置参数的坐标,并将其距离初始化为0,将此节点加入队列。
3)循环判断队列是否为空,如不空,取队首节点赋值给结构体变量NEWNODE,判断此节点的X,Y坐标是否等于传入的终点位置坐标,如相等,结束循环,并将标志变量P赋值为true。
如不相等,根据该节点的X,Y坐标依次向右、上、左、下四个方向的下一个位置探索是否可通(即此位置是否为0)。
4)如可通,将此位置的坐标赋值给OLDN ODE,并将OLDNODE的距离值赋值为NEWN ODE的距离值加1,将OLDNODE加入队列。
5)如不可通,转3)。
6)如标志变量P的值为false,说明传入的两点之间不可达,输出提示信息,结束。
如果P的值为tr ue,说明两点之间存在通路,并返回两点之间的最短距离。
1.3用深度优先算法求出所有宝藏间距离
在得到所有宝藏之间距离的基础上,利用深度优先遍历,参数为入口点的位置标记、初始体力值和记录N个宝藏位置标记的集合。
在遍历的过程中,到某宝藏时计算此时所剩的体力值,同时检查是否访问到所有的宝藏,还要注意避免对该宝藏位置重复计算,因为第二次到达该位置时应该按一条通路来看待。
根据是否达到终点结束程序,同时返回最大体力值。
伪代码描述如下:v oid dfs(int sortNum,int life,set<int>setFindedQueue);BEGIN(算法开始);根据传入参数sortNum和life生成节点,此时节点代表入口节点,将此节点入栈;w hile(栈不为空){出栈栈顶元素节点;if(此节点已访问宝藏的集合==setFindedQueue);计算该节点达到出口的体力值;if(该体力值>max value)//max value全局变量表示走出时最大体力值;m ax value=该体力值;endif;else。
依次访问setFindedQueue中的所有节点,判断每个节点是否在该出栈节点的遍历宝藏集合中,如不在,生成新节点,此节点入栈。
endif};end(算法结束)。
算法中应注意宝藏不能捡2次,当第2次经过宝藏的时候应该把它作为一条通路来看,而不应该是再捡一次。
如果走到一个宝藏时体力值刚好为零,应该作为还可以再走,因为走到这个宝藏处可以获得一定的体力值。
当走出迷宫时体力值刚好为零,应该输出零,而不该输入不能走出迷宫。
主程序伪代码如下:begin(算法开始);打开输入文件input.tx t,读入数据,初始化变量;初始化nx,ny存放入口,出口,各宝藏的坐标值;for(i=入口位置到第N个宝藏位置);for(j=第一个宝藏位置到出口位置);g[i][j]=BFS(nx[i],ny[i], nx[j],ny[j]);endfo r;endfo r;初始化集合et存放宝藏位置标记;调用DFS深度优先遍历;if(DFS返回最大体力值为负);输出提示信息到输出文件,结束。
else;将最大体力值输出到文件;endif;关闭文件;end(算法结束)
2结束语
解决这个问题的关键在于在算法中引用了ST L中的数据结构和算法。
在传统的解决方法中,此类问题也能得到解决,但很明显,由于在STL中内置了很多针对不同数据结构效率极佳的操作算法,执行起来非常的方便、快捷。
在深度和广度优先搜索中递归[3]方法的使用,简化了对复杂相似问题的求解过程。
如果用非递归算法会非常冗长,而且最终也必须使用堆栈[4]进行模拟递归。
用递归的方法实现的程序代码往往比较简单,但是运行效率却不是很高,这是一个值得注意的问题。
在这里当然能用ST L之外的数据结构和算法同样实现图的遍历问题,效率也不是特别低。
参考文献
[1]侯捷.ST L源码剖析[M]1武汉:华中科技大学出版社,
2002:201.
[2]候捷.C++标准程序库[M].武汉:华中科技大学出版
社,2002:72.
[3]SHT ER N V.C++精髓软件工程方法[M].李师贤,译.
北京:机械工业出版社,2002:158.
[4]苏仕华.数据结构与算法解析[M].合肥:中国科学技术
大学出版社,2006:62.
=责任编辑王云鹏>
#
51
#。