第四章:固体力学大变形基础
固体力学概述
固体力学概述1. 固体力学基本概念固体力学是研究固体在各种力和力矩作用下的力学行为的科学。
固体可以是晶体、非晶体、复合材料或生物组织等。
固体力学主要关注的是固体在受力状态下的行为,包括变形、断裂、损伤等。
2. 弹性力学基础弹性力学是研究弹性体在外力作用下的应力、应变和位移等的学科。
当外力撤去后,弹性体能够恢复到原来的状态。
弹性力学的基本原理包括胡克定律、弹性模量等。
3. 材料力学材料力学是研究材料在各种力和力矩作用下的行为的学科。
它主要关注材料的强度、刚度、稳定性等问题,以及如何设计出既安全又经济的结构。
4. 塑性力学塑性力学是研究塑性变形过程的学科。
当外力超过材料的屈服点时,材料会发生塑性变形,即使外力撤去后也不能完全恢复原来的形状。
塑性力学对于理解材料的极限承载能力和工程设计中的安全系数至关重要。
5. 断裂力学断裂力学是研究材料断裂行为的学科。
它主要关注的是裂纹的萌生、扩展和断裂的过程,以及如何预测和控制材料的断裂行为。
6. 复合材料力学复合材料力学是研究复合材料的力学行为的学科。
复合材料由两种或多种材料组成,其力学行为比单一材料复杂得多。
复合材料力学对于航空、航天、汽车等领域的材料设计具有重要意义。
7. 热力学与相变热力学与相变是研究材料在温度变化时的热力学特性和相变行为的学科。
它涉及到材料的热膨胀、热传导、相变温度等,对于理解材料的热行为和热稳定性至关重要。
8. 非线性力学非线性力学是研究非线性现象的学科。
当外力足够大时,固体材料的力学行为会变得非常复杂,出现非线性现象,如分岔、混沌等。
非线性力学对于理解材料的极限行为和设计复杂结构具有重要意义。
9. 有限元分析有限元分析是一种数值分析方法,用于求解各种复杂的固体力学问题。
通过将连续的物体离散化为有限个小的单元(称为有限元),可以用数值方法求解这些单元的平衡方程,从而得到物体的应力、应变等。
有限元分析是现代工程设计和分析中不可或缺的工具。
弹性变形名词解释

弹性变形名词解释弹性变形是指物体在受到外力作用后产生的可逆性变形过程。
在弹性变形中,物体会根据力的大小和方向发生形状和大小的改变,但一旦外力停止作用,物体会重新回复到原来的形状。
这种变形过程是可逆的,不会产生永久形变或破坏物体的结构。
弹性变形是固体力学中的一个基本概念,广泛应用于工程、材料科学和物理学等领域。
它对于研究物体的力学性质和设计结构的稳定性非常重要。
弹性变形可以用很多名词来解释,下面是一些相关的名词解释:1. 应力(Stress):应力是物体受到外力作用时产生的内部力。
它是单位面积上的力,可以分为正应力和剪应力两种。
正应力是作用于物体上的力的方向与物体表面法线方向相同或相反的力,剪应力是作用于物体上的力的方向与物体表面法线方向垂直的力。
2. 应变(Strain):应变是物体在受到外力作用时产生的形变量。
它是物体原始长度改变的比例,可以分为正应变和剪应变两种。
正应变是物体单位长度的变化量,剪应变是物体单位长度的旋转角度。
3. 弹性模量(Elastic modulus):弹性模量是衡量物体弹性变形能力的物理量。
它是应力与应变的比值,反映了物体对外力的抵抗能力。
常见的弹性模量有杨氏模量、剪切模量和泊松比。
4. 压缩变形(Compression deformation):压缩变形是物体在受到外力作用时沿着一定方向发生的体积缩小现象。
在压缩变形中,物体的体积减小,但它的形状和大小并没有发生明显的改变。
5. 拉伸变形(Tensile deformation):拉伸变形是物体在受到外力作用时沿着一定方向发生的形状延伸现象。
在拉伸变形中,物体的长度增加,但它的体积和形状并没有发生明显的改变。
6. 弹性极限(Elastic limit):弹性极限是物体在受到外力作用时可以恢复到原来形状的最大应力点。
超过弹性极限后,物体会发生永久形变而不能回复到原来的形状。
7. 弹性回复(Elastic recovery):弹性回复是指物体在外力作用停止后重新回复到原始形状的能力。
材料力学-杆件的变形计算

再进行一次积分,可得到挠度方程
EIzw ( M (x)dx)dx Cx D
其中, C 和 D 是积分常数,需要经过边界条件或者连续条件来拟
定其大小。
❖ 边界条件:梁在其支承处旳挠度或转角是已知旳, 这么旳已知条件称为边界条件。
❖ 连续条件:梁旳挠曲线是一条连续、光滑、平坦旳 曲线。所以,在梁旳同一截面上不可能有两个不同 旳挠度值或转角值,这么旳已知条件称为连续条件。
例题4-2: 已知:l = 54 mm ,di = 15.3 mm,E=200 GPa,
= 0.3,拧紧后,△l =0.04 mm。 试求:(a) 螺栓横截面上旳正应力 σ (b) 螺栓旳横向变形△d
解:1) 求横截面正应力
l 0.04 7.4110-4
l 54 E 200 103 7.41104 148.2 MPa
M lBA BA GI p
180 7Ma π GI p
x
7 3
j
DB
2.33
第三节 梁旳变形
1、梁旳变形
梁必须有足够旳刚度,即在受载后不至于发生过大旳弯 曲变形,不然构件将无法正常工作。例如轧钢机旳轧辊,若 弯曲变形过大,轧出旳钢板将薄厚不均匀,产品不合格;假 如是机床旳主轴,则将严重影响机床旳加工精度。
dx
GI p
取
dj M x
dx GI p
单位长度扭转角 用来表达扭转变形旳大小
单位长度扭转角旳单位: rad/m
GI p 抗扭刚度
GI p 越大,单位长度扭转角越小
g
在一段轴上,对单位长度扭转角公式进行积分,
就可得到两端相对扭转角j 。
dj
dx
dj M x
固体力学概论

时间相关
单轴拉伸试验曲线
单轴拉伸试验曲线(同样可作扭转与剪切试验)
应力张量和应变张量
应力张量:任意质点的应力有6个独立分量,形成二阶张量
11 12 ij 21 22
、 铁木生柯(Timoshenko)专著”Strength of Materials”, “Theory of Elasticity”
“Theory of Elastic Stability” 、“Theory of Plates and Shells”与符拉索 夫(薄壁杆件). • 中国东汉(127~200)郑玄提出线性弹性关系; 宋代李诫《营造法式》;隋代 李春(581~618)赵州桥。
下面以梁为例,此假设大大简化了问题. 无穷自由度问题简化为一个自由度问题,只有 一个挠度函数是要求的.这样,用弹性力学理论,有15个基本方程,15个基本未知量.
根据平截面假设大大简化:梁的挠度为 w(x) , 梁的基本方程(控制方程)为:
M d2w EI dx2
d 2w dx2
1
p
x
max
max
固体力学概论
(综合基础课) 2005版
目录
• 第一章 前言 • 第二章 基本假设 • 第三章 本构关系(物理方程) • 第四章 基本方程 • 第五章 能量原理(包括变分原理) • 第六章 固体力学中的数值方法
第一章 前言
• 固体力学的定义 • 固体力学的基本假设与主要研究内容 • 学科分支 • 研究对象与任务 • 发展史 • 参考资料
变);
③ 在发生弯曲变形时,板的中面无拉伸变形。①②为基尔 霍夫假定(克希霍夫假定)。
固体力学基本方程
固体力学基本方程固体力学是研究物体在受力作用下的变形和运动的学科。
其基础是一些基本方程,这些方程是描述固体材料力学行为的数学表达式。
本文将介绍固体力学中的基本方程,包括应力-应变关系、变形与位移关系、能量方法、力学平衡方程和边界条件等。
1.应力-应变关系应力-应变关系是固体力学中最基础的方程之一。
它描述了外力作用下固体材料的应变与应力之间的关系。
根据麦克斯韦方程,应变是应力与弹性模量之间的比例关系。
对于线弹性材料,应力与应变之间满足胡克定律,即应力等于弹性模量与应变的乘积。
2.变形与位移关系变形与位移关系是描述固体材料在受力作用下发生变形时,材料内部各点位移与应变之间的关系。
对于小变形情况,可以利用拉格朗日描述变形。
拉格朗日公式用位移场来描述固体的运动,并与应变场相关联。
位移与应变之间的关系可由位移梯度张量和应变张量之间的关系给出。
3.能量方法能量方法是固体力学中一种重要的分析方法。
它基于能量守恒原理,通过计算系统储存的弹性势能和外界对系统做的功来得出力学行为。
能量方法不仅可以用于弹性材料的分析,还可以用于塑性、粘弹性和断裂等不同力学行为的分析。
4.力学平衡方程力学平衡方程是固体力学中最基本的方程之一。
它描述了固体物体在受力作用下的平衡条件。
根据牛顿定律和力的平衡性,可以得出力学平衡方程。
对于静力学平衡,作用在物体上的体力之和等于零;对于动力学平衡,还需要考虑物体的加速度。
5.边界条件边界条件是解固体力学问题时必须考虑的重要因素之一。
它描述了固体物体与外界的相互作用。
边界条件可以包括位移边界条件、力边界条件和热边界条件等。
位移边界条件描述了物体的边界上的位移情况,力边界条件描述了物体与外界的力的作用关系,热边界条件描述了物体在温度变化下的行为。
固体力学基本方程是固体力学研究的基础,它们为解决工程和科学问题提供了框架和方法。
这些方程的应用范围广泛,包括材料强度分析、结构力学、固体材料的变形和破坏行为等。
计算固体计算力学-内容简介

第四章 几何非线性问题及其有限元求解
01
大变形条件下的应力和
应变的度量
02
几何非线性问题的表达
格式
03
大位移非线性弹性理论
的变分原理
04
几何非线性问题的有限
05
结构稳定性和屈曲问题
元分析
授课内容简介
第五章 接触和碰撞问题及其有限元求解 接触问题的界面条件 接触问题的求解方案 接触问题的有限元方程 接触问题的有限元求解 接触分析中的若干问题
授课内容简介
1
第二章 非线性方程(组) 的解法
2
直接迭代法
○ Newton-Raphson法(简 称N-R法)
○ 改进的NewtonRaphson法(简称M-N-R 法)
○ 增量法
授课内容简介
第三章 材料非线性问题及其有限元求解
01
材料弹塑性本 构关系
03
弹塑性增量有 限元分析
02
塑性力学中的 变分原理
目录
01
博士研究生课程
02
计算固体力学
03
课程编号:017090
04
王生楠,谢伟
05
西北工业大学 航空学院
计算固体力学课程体系
授课内容简介
第二章 非线性方程 (组)的常用解法
第四章 几何非线性 问题及其有限元求解
01
第一章 引言
02
03
第三章 材料非线性 问题及其有限元求解
04
05
第五章 接触和碰撞 问题及其有限元求解
参考书籍
01
有限元法中的变 分原理基础,王 生楠编,西工大 出版社
02
航天器计算结构 力学,竺润祥主 编,宇航出版社
固 体 力 学
固体力学固体力学是力学中形成较早、理论性较强、应用较广的一个分支,它主要研究可变形固体在外界因素(如载荷、温度、湿度等)作用下,其内部各个质点所产生的位移、运动、应力、应变以及破坏等的规律。
固体力学研究的内容既有弹性问题,又有塑性问题;既有线性问题,又有非线性问题。
在固体力学的早期研究中,一般多假设物体是均匀连续介质,但近年来发展起来的复合材料力学和断裂力学扩大了研究范围,它们分别研究非均匀连续体和含有裂纹的非连续体。
自然界中存在着大至天体,小至粒子的固态物体和各种固体力学问题。
人所共知的山崩地裂、沧海桑田都与固体力学有关。
现代工程中,无论是飞行器、船舶、坦克,还是房屋、桥梁、水坝、原子反应堆以及日用家具,其结构设计和计算都应用了固体力学的原理和计算方法。
由于工程范围的不断扩大和科学技术的迅速发展,固体力学也在发展,一方面要继承传统的有用的经典理论,另一方面为适应各们现代工程的特点而建立新的理论和方法。
固体力学的研究对象按照物体形状可分为杆件、板壳、空间体、薄壁杆件四类。
薄壁杆件是指长宽厚尺寸都不是同量级的固体物件。
在飞行器、船舶和建筑等工程结构中都广泛采用了薄壁杆件。
固体力学的发展历史萌芽时期远在公元前二千多年前,中国和世界其他文明古国就开始建造有力学思想的建筑物、简单的车船和狩猎工具等。
中国在隋开皇中期(公元591~599年)建造的赵州石拱桥,已蕴含了近代杆、板、壳体设计的一些基本思想。
随着实践经验的积累和工艺精度的提高,人类在房屋建筑、桥梁和船舶建造方面都不断取得辉煌的成就,但早期的关于强度计算或经验估算等方面的许多资料并没有流传下来。
尽管如此,这些成就还是为较早发展起来的固体力学理论,特别是为后来划归材料力学和结构力学那些理论奠定了基础。
发展时期实践经验的积累和17世纪物理学的成就,为固体力学理论的发展准备了条件。
在18世纪,制造大型机器、建造大型桥梁和大型厂房这些社会需要,成为固体力学发展的推动力。
固体力学中的弹性变形分析
固体力学中的弹性变形分析弹性变形分析是固体力学领域中的重要内容,它研究了物体在受力作用下的变形行为及其内部应力分布。
弹性变形分析在工程设计和材料研究中具有广泛应用,能够为工程师和科学家提供有关结构强度和材料特性的重要信息。
弹性变形是指物体在受到外部力作用时能够恢复原状的变形行为。
这种变形是由于物体的原子和分子之间的相互作用力发生微小的变化所引起的。
物体在受力作用下,外部力会导致原子和分子发生相对位移,从而引起整个物体的变形。
在弹性变形的过程中,物体内部的应力分布是均匀的,当外部力解除后,物体会恢复原来的形状和大小。
弹性变形分析可以通过应力-应变关系来描述。
应力是物体受力后单位面积上的内部力,而应变是物体受力后单位长度的相对位移。
根据胡克定律,应力和应变之间存在线性关系,这种关系被称为胡克定律。
胡克定律表明了应力和应变之间的比例关系,可以用弹性模量来表示。
弹性模量是描述物体弹性性质的重要参数,它是描述应力和应变之间关系的比例系数。
不同材料的弹性模量不同,材料的弹性性质也会因此而有所差异。
对于各向同性材料,弹性模量可以根据宏观实验数据和材料特性进行计算,从而得到材料的弹性变形特性。
弹性变形分析在工程设计中有广泛应用。
通过进行弹性变形分析,工程师可以确定材料的最大应力和最大应变,从而确定材料是否适用于特定工程应用。
此外,弹性变形分析还可以用于优化工程设计,例如减少应力集中和破坏点,提高工程结构的安全性和可靠性。
材料研究中的弹性变形分析也非常重要。
通过对材料的弹性变形行为进行分析,可以揭示材料的力学性质和变形机制。
这对于开发新材料和改进材料特性至关重要。
通过弹性变形分析,可以确定材料的弹性模量、屈服强度等重要参数,为材料的应用提供科学依据。
总之,弹性变形分析在固体力学领域中占据重要地位。
它能够揭示物体在受力作用下的变形行为和内部应力分布,为工程设计和材料研究提供重要信息。
弹性变形分析的应用范围广泛,可用于优化工程设计和开发新材料。
计算固体计算力学 - 第四章 几何非线性问题

。对于某一固定时刻t这种变换可以表示为
* 拉各朗日(Lagrange)描述
t
xi t xi ( 0 x1, 0 x2 , 0 x3 )
基于变形前的构型表述变形后的构型。以变形前的各点坐标 为基本未知数,描述各个量。 根据变形的连续性要求,这种变化必须一一对应,即变换是 单值连续的。同时变换应有唯一的逆变换,也是单值连续的 * 欧拉(Eular)描述
t
t 0 ji
T
t 0
S ji
15
计算固体计算力学
各种应力张量之间的关系: (1)由质量守恒:
t
0
0
V
dV
t
t
V
dV
t
0
V
det( 0 t xi , j ) dV
0 det( t xi , j ) 0 t 0 t 0 t t t t (2) 0 Tji t t x j , m mi , ji 0 0 x j , m 0Tmi t 0 t t t t 0 0 t (3 ) t S x x Smn x x ji 0 j , m 0 i , n 0 0 0 ji t j ,m t i,n mn , t
其中:
不能求解
uk
--现实位移分量的变分; --应变的变分; --在现实位形内度量的面积载荷 --在现实位形内度量的体积载荷
t
17
计算固体计算力学
第三节 大变形情况下的本构关系
等温、绝热条件下的小变形线弹性情况,可以用三 种等效的方法描述应力和应变之间的关系
ij Dijkl kl
W ij ij
W
1 Dijkl ij kl 2
材料力学重点归纳
材料力学考试重点一、。
课程的性质、任务材料力学是变形体力学的最基础课程。
固体力学(即变形体力学)是研究固体材料的变形、流动和断裂的一门科学。
它是材料科学专业的一门理论性较强的重要的技术基础课程。
本课程的基本任务是为了提高材料工程类专业学生的力学基础素养,使之掌握该专业所必需的固体力学基本概念、基本方法和基础理论,培养学生具备一定的力学分析计算能力和基本的力学实验技能,为学习后续专业课程奠定必要的力学基础。
教学的同时注意结合本课程的特点培养学生的辩证唯物主义观点。
二、课程的基本要求通过本课程的教学,应使学生达到下列基本要求:1.理论力学静力学是系统学习力学课程的必要基础。
因此要求学生理解并掌握理论力学静力学的有关概念和理论。
了解几种常见的约束类型的性质及静力学基本公理。
较熟练地掌握对物体进行受力分析的方法。
2.了解静力学的基本任务。
理解并掌握力线的平移定理。
熟悉各类平面力系的简化方法和结果。
掌握各类平面力系的平衡条件,并能熟练地应用它们去求解物体(或物体系)的平衡问题。
简单了解空间力系的简化结果、力对轴之矩的概念及重心的概念。
3.理解并掌握固体力学的有关基本概念:对固体力学分析问题、解决问题的基本方法和思路有明确的认识。
4.掌握一维工程构件三种基本变形的内力、应力和变形的分布变化规律、基本分析方法以及计算方法。
5.清楚了解研究测试固体材料力学性质的意义和方法,对常见固体材料(典型的金属材料和岩石)的力学性质和测定方法有基本认识和掌握。
了解电测应力方法的基本原理。
6.对应力、应力状态、应变、应变、应变状态的概念有较明确的认识。
较熟练掌握应力分析理论和应变分析理论。
7.理解和掌握固体材料弹性变形和塑性变形的主要特征,对屈服函数、主应力空间、屈服面、屈服曲线、屈服条件等概念有较明确认识。
熟悉掌握强度理论:最大拉应力理论、最大剪应力理论、形状改变比能理论、莫尔强度理论和库仑-纳维叶剪切强度准则的基本观点、适用范围、表达形式和工程应用。
土力学课件

①在稳定坡角时的临界高度:
H cr =KH = 1.2×5=6m
【解答】
稳定因数:9
.80
.1268.17=⨯==c H N cr
s γ由ϕ=15°,N s = 8.9查图得稳定坡角= 57°
②由β=60°,ϕ=15°查图得泰勒稳定数N 为8.6 6.80.128.17=⨯==
库伦理论假定破坏面为一平面,而实际上为曲面。实践证明,计算的主动土压力误差不大,而被动土压力误差较大。
地面荷载作用下的土压力
第八章土坡稳定分析
主要内容
无粘性土土坡稳定分析
粘性土土坡稳定分析
土坡稳定分析中有关问题*
土坡稳定概述天然土坡人工土坡
由于地质作用而
自然形成的土坡
在天然土体中开挖
或填筑而成的土坡坡底坡脚坡角
一、概述
土压力:
挡土结构背后土体的自重或外荷载在结构上产生的侧向作用力。
自重土压力
墙后墙前墙顶
墙底(基底)墙趾
墙跟(踵)
墙
背刚性结构和柔性结构
墙
面
三、Rankine 土压力理论(1857
)
William John Maquorn Rankine
(1820 -1872)
土力学热力学
英国科学家
ττ=
二、地基中的应力计算
地基假设为:
半无限体
弹性
均质
各项同性
地基
如考虑
3. 基底的接触压力
•刚性基础
•柔性基础
•绝对柔性基础
Valentin Joseph Boussinesq(1842-1929)
固体力学基础和结构优化
固体力学基础和结构优化固体力学是研究物体在外力作用下的变形和破坏规律的学科,是现代工程学科中不可或缺的基础课程。
而结构优化则是通过数学、计算机和工程力学等方法对结构进行优化设计,以获得更加经济、可靠、轻量化的结构。
固体力学的基本理论包括力学基本原理、应力、应变、弹性力学、塑性力学、断裂力学等。
物体在外力的作用下会产生应力和应变,根据固体的性质可以分为弹性体和塑性体。
弹性力学研究物体在外力作用下的变形规律,根据材料的性质可以分为线弹性和非线弹性。
线弹性假设了应力和应变之间的线性关系,非线弹性研究了应力和应变之间的非线性关系。
在极限载荷或超过材料抗力时,物体可能发生破坏,这时需要借助断裂力学来研究物体的破坏行为。
断裂力学是研究材料在应力场和应变场中,如何扩展和传播导致破坏的裂纹形成和破裂的学科。
在了解了固体力学的基本理论之后,我们可以利用这些理论来进行结构优化的设计。
结构优化是指在给定的约束条件下,通过优化设计方法改进结构的性能,并寻求最佳的结构形式。
优化设计可以通过减小结构重量、降低应力和应变、提高结构自然频率等方面来提升结构的性能。
结构优化方法主要分为传统优化方法和现代优化方法。
传统优化方法包括直接搜索法、系统搜索法、逐级法、响应面法等,这些方法的优点是结构简单,易于理解和计算,但在复杂的结构优化问题上效果较差。
现代优化方法主要包括遗传算法、粒子群算法、蚁群算法、模拟退火算法等,这些方法适用于复杂的结构优化问题,但计算量较大。
在进行结构优化设计时需要考虑的因素包括结构的刚度和强度、可靠性和安全性、经济性和可制造性等。
通过调整结构的材料选择、截面形状、连接方式等来达到最佳的设计结果。
在实际工程中,固体力学和结构优化的应用非常广泛。
例如,在航空航天工程中,通过结构优化设计可以减轻飞机、火箭等的结构重量,提高载荷能力和燃油效率;在桥梁工程中,通过结构优化设计可以减小结构挠度,提高刚度和稳定性;在建筑工程中,通过结构优化设计可以增加建筑物的抗震能力,确保安全。
固体力学大变形基础

面积变 换公式
eijk
xi X l
x j X m
xk X n
dX
m
dX
' n
xi ,l
ni dA
e
lmn
JdX
m
dX
' n
JN l dA0
根据变形梯度张量可逆
N i dA0
eijk
dX
j
dX
' k
xi X l
X l xi
xi ,l
X l ,i ii
1
由此面元变换公式也可表为
面积变
ni dA JX l ,i N l dA0
不为零。也即变形梯度可逆
J xi 0 X j
x1 ,1 x1 ,2 x1 ,3
xi X j
xi , X j
xi , j
Ricci符号
Ricci
J x2 ,1 x3 ,1
x2 ,2 x3 ,2
x , e x , x , x , 2 3
ijk i 1
j2
k
3
1 1231 eijk 1 3 2 1 3
xk X n
dX
l dX
m' dX
"
n
elmn
JdX
l
dX
' m
dX
" n
Je ijk
dX
i
dX
' j
dX
" k
JdV0
体积变换公式
elmn J
eijk xi ,l
x j ,m
xk ,n
eijk
xi X l
x j X m
xk X n
1.4、面积变换公式
简述变形固体的基本假设
简述变形固体的基本假设变形固体是指在外力作用下,能够发生形变而不恢复原状的物质。
它的基本假设有三个方面:连续介质假设、弹性线性假设和平面假设。
连续介质假设是变形固体研究的基础假设。
它假设物质是连续分布的,不考虑其内部离散结构,将物质视为无限小的微元,不考虑微观粒子之间的相互作用。
这个假设使得我们能够应用连续介质力学的理论和方法来研究变形固体的宏观性质和行为。
弹性线性假设是变形固体力学研究的基本假设之一。
它假设固体在小应变范围内,应力和应变之间存在线性关系,即满足胡克定律。
这个假设使得我们能够通过简单的线性代数方法来描述和求解变形固体的力学问题。
然而,在大应变范围内,弹性线性假设将不再适用,因为材料的非线性行为会显现出来。
平面假设是变形固体力学研究中的另一个基本假设。
它假设固体在变形过程中,其截面始终保持平面且垂直于变形方向。
这个假设使得我们能够简化问题的复杂度,将三维问题转化为二维问题,从而更容易进行分析和计算。
基于以上三个基本假设,变形固体力学建立了一套完整的理论体系,用于描述和预测物体在外力作用下的变形行为。
在应用方面,变形固体力学的理论可以用于设计和优化工程结构,预测材料的疲劳寿命,分析地震引起的土体变形等。
然而,需要注意的是,变形固体力学的基本假设并非绝对适用于所有情况。
在某些特殊的情况下,如高速碰撞、材料断裂等极端条件下,物体的变形行为可能不再满足上述假设,需要引入更加复杂的力学理论来描述和分析。
变形固体力学的基本假设包括连续介质假设、弹性线性假设和平面假设。
这些假设为我们研究和应用变形固体力学提供了基本框架和数学工具。
然而,在实际应用中,我们需要根据具体问题的特点和条件,合理选择适用的力学理论和假设,以获得准确且可靠的结果。
工程力学4材料力学的基本概念
F
F
F
FN=F
工程力学4材料力学的基本概念
第4章 材料力学的基本概念
弹性体受力与变形特征
M0 M0
M0
M= M0
工程力学4材料力学的基本概念
第4章 材料力学的基本概念
弹性体受力与变形特征
F1
F3
F2
Fn
假想截面
内力与外力平衡; 内力与内力平衡。
作用在弹性体上 的外力相互平衡
F1
工程力学4材料力学的基本概返念 回总目录
第4章 材料力学的基本概念
“材料力学”的研究内 容
返回
工程力学4材料力学的基本概念
第4章 材料力学的基本概念
“材料力学”的研究内 容
材料力学(strength of materials)的研究内容分属于两 个学科。
第一个学科是固体力学(solid mechanics),即研究物体 在外力作用下的应力、变形和能量,统称为应力分析(stress analysis)。但是,材料力学所研究的仅限于杆、轴、梁等物 体,其几何特征是纵向尺寸(长度)远大于横向(横截面) 尺寸,这类物体统称为杆或杆件(bars或rods)。大多数工 程结构的构件或机器的零部件都可以简化为杆件。
本章介绍材料力学的基础知识、研究方法以及材料力学 对于工程设计的重要意义。
工程力学4材料力学的基本概念
第4章 材料力学的基本概念
“材料力学”的研究内容 杆件的受力与变形形式 工程构件静力学设计的主要内容 关于材料的基本假定 弹性体受力与变形特征 材料力学的分析方法 应力、应变及其相互关系 结论与讨论
球墨铸铁的 显微组织
微观不连续 ,宏观连续 。
工程力学4材料力学的基本概念
固体力学知识点
固体力学知识点固体力学是力学的一个重要分支,研究固体物质内部受力和变形的规律。
在工程领域和物理学领域都有广泛的应用。
下面将介绍一些固体力学的基本知识点。
一、应力与应变应力是单位面积上的受力,通常用符号σ表示,它可以分为正应力、剪应力等不同类型。
应变是物体单位长度的变化量,通常用符号ε表示,包括线性应变、剪应变等不同类型。
应力和应变之间存在一定的关系,通常用杨氏模量、泊松比等参数来描述。
二、弹性力学弹性力学是固体力学的一个重要分支,研究物体在受力后恢复原状的性质。
其中的胡克定律规定了弹性体的应力与应变之间的线性关系,是弹性力学的基础。
在实际工程中,弹性力学的理论可以用来设计结构的强度和稳定性。
三、塑性力学塑性力学研究的是物体在受到较大应力时产生塑性变形的性质。
在工程领域中,塑性变形会导致材料的永久变形,而不会完全恢复原状。
材料的屈服点是塑性变形开始的临界点,超过屈服点后材料就会发生塑性变形。
四、断裂力学断裂力学研究的是材料在受到外界作用下失去稳定性、发生破裂的过程。
断裂可以分为韧性断裂、脆性断裂等不同类型,影响因素包括应力集中、缺陷等。
在材料设计和工程实践中,断裂力学的理论可以用来预测物体的破坏形式和破裂强度。
五、应用领域固体力学的知识点在工程领域有着广泛的应用,包括建筑结构设计、航空航天领域、材料加工等方面。
通过对固体力学知识的研究,可以提高工程设计的准确性和可靠性,推动科学技术的发展。
总之,固体力学是一门重要的学科,它不仅具有理论意义,还有着广泛的应用价值。
通过深入学习固体力学知识,可以更好地理解物体内部的受力和变形规律,为工程实践和科学研究提供有力支持。
希望以上介绍的知识点能够帮助您更好地了解固体力学的基本概念和原理。
第四章变形体静力学基础
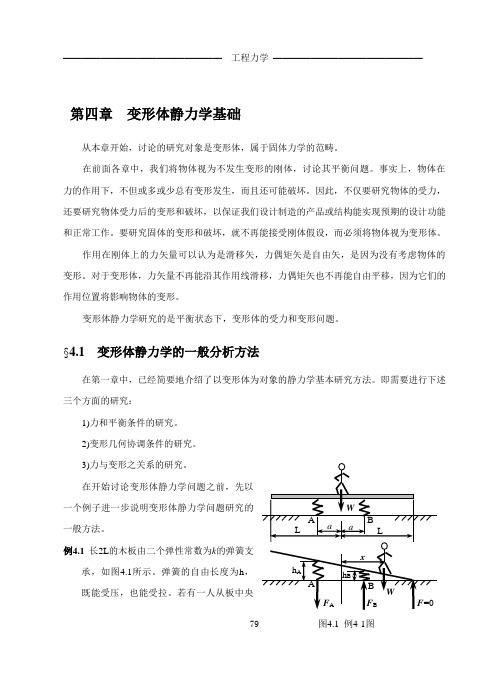
79第四章 变形体静力学基础从本章开始,讨论的研究对象是变形体,属于固体力学的范畴。
在前面各章中,我们将物体视为不发生变形的刚体,讨论其平衡问题。
事实上,物体在力的作用下,不但或多或少总有变形发生,而且还可能破坏。
因此,不仅要研究物体的受力,还要研究物体受力后的变形和破坏,以保证我们设计制造的产品或结构能实现预期的设计功能和正常工作。
要研究固体的变形和破坏,就不再能接受刚体假设,而必须将物体视为变形体。
作用在刚体上的力矢量可以认为是滑移矢,力偶矩矢是自由矢,是因为没有考虑物体的变形。
对于变形体,力矢量不再能沿其作用线滑移,力偶矩矢也不再能自由平移,因为它们的作用位置将影响物体的变形。
变形体静力学研究的是平衡状态下,变形体的受力和变形问题。
§4.1 变形体静力学的一般分析方法在第一章中,已经简要地介绍了以变形体为对象的静力学基本研究方法。
即需要进行下述三个方面的研究:1)力和平衡条件的研究。
2)变形几何协调条件的研究。
3)力与变形之关系的研究。
在开始讨论变形体静力学问题之前,先以一个例子进一步说明变形体静力学问题研究的一般方法。
例4.1 长2L 的木板由二个弹性常数为k 的弹簧支承,如图4.1所示。
弹簧的自由长度为h ,既能受压,也能受拉。
若有一人从板中央图4.1 例4-1图向一端缓慢行走,试求板与地面刚刚接触时,人所走过的距离x。
解:设人重为W,板重与人重相比较小,忽略不计。
讨论板与地面刚刚接触的临界状态,此时F=0;弹簧B受压缩短,弹簧A受拉伸长,板受力如图所示。
1) 力的平衡条件:由平衡方程有:∑F y=F B-F A-W=0 --(1)∑M A(F )=2aF B-(x+a)W=0 --(2)如果x已知,弹簧反力F A、F B即可求得。
现在x未知,只考虑力的平衡不能解决问题,需考虑变形。
板与弹簧相比刚硬得多,可作刚体处理,只考虑弹簧的变形。
2) 变形几何协调条件:弹簧变形如图所示,刚性板要保持为直板,则二弹簧变形后应满足的几何条件是:h B/h A=(L-a)/(L+a) (x>0) --(3)弹簧A、B的变形为δA=h A-h (图中假定为受拉伸长);--(4)及δB=h-h B(图中假定为受压缩短)。
计算固体力学

计算固体力学固体力学是力学的一个分支领域,研究的是固体物质在外力作用下的力学行为和性质。
它是分析和解决工程和物理学中与固体结构、变形、变形机理、强度等相关问题的基础。
固体力学的研究内容包括静力学、弹性力学、塑性力学、断裂力学和疲劳力学等等。
静力学主要研究物体处于静止状态下受力分布和平衡条件的关系;弹性力学研究固体物体产生变形后能够恢复原状的性质;塑性力学研究固体物体在超过一定限度下,产生不可逆的塑性变形;断裂力学研究的是在材料中出现断裂破裂现象的力学行为;疲劳力学研究的是材料在持续受到循环载荷下发生损伤和失效的行为。
固体力学的基本概念和原理包括应力、应变、弹性模量、泊松比等。
应力是指单位面积上的力,通常用σ表示,分为正应力和剪应力两种。
应变是指物体在受力作用下产生的相对变形,通常用ε表示,分为线性应变和剪应变两种。
弹性模量是描述材料刚度的属性,是应力与应变之间的比例系数,常见的有杨氏模量、剪切模量等。
泊松比则是描述材料在受力过程中沿一个方向收缩而在另一个方向伸展的程度。
在固体力学中,有两个重要的定理,即能量原理和最大能原理。
能量原理指出,在稳定状态下,体系的能量应当达到最小值。
这个原理可以用来推导结构的力学行为,比如弹性体的变形及应力分布。
最大能原理则是指在固体的力学行为中,材料的破坏会先出现在应力最大的地方。
固体力学的应用非常广泛。
在工程领域中,它可以用于设计和分析结构的强度、刚度和稳定性等问题,比如建筑、桥梁、飞机等。
在材料科学中,固体力学可以帮助研究材料的力学性质、性能和失效机理等,比如金属、陶瓷、塑料等。
在地球科学领域中,固体力学可以用于研究地壳运动、构造变形、地震等现象。
此外,固体力学还被应用于生物医学领域,研究生物材料的性能和组织工程等。
总之,固体力学是研究固体物质在外力作用下的力学行为和性质的分支学科。
它在工程、物理学、材料科学、地球科学和生物医学等领域中都有重要的应用价值。
通过对固体力学的研究和应用,我们可以更好地理解和解决与固体力学相关的问题,促进科学技术的发展和进步。
【完整版毕业论文】固体力学毕业论文
【完整版毕业论文】固体力学毕业论文摘要:本文旨在深入探讨固体力学的基本理论、研究方法及其在工程实践中的广泛应用。
通过对固体材料的力学性能、变形和破坏机制的研究,为相关领域的设计和分析提供了坚实的理论基础。
关键词:固体力学;力学性能;变形;破坏机制一、引言固体力学作为力学的一个重要分支,主要研究固体材料在受到外力作用时的变形、应力和应变分布,以及固体材料的破坏和失效规律。
它在工程领域中具有广泛的应用,如机械工程、土木工程、航空航天工程等,对于保障结构的安全性和可靠性具有重要意义。
二、固体力学的基本理论(一)应力和应变分析应力是指单位面积上所承受的内力,应变则是描述物体变形程度的物理量。
通过应力和应变的分析,可以了解固体材料在受力情况下的内部状态。
(二)弹性力学理论弹性力学主要研究固体材料在弹性范围内的变形和应力分布。
胡克定律是弹性力学的基本定律,它描述了应力与应变之间的线性关系。
(三)塑性力学理论当固体材料所受应力超过弹性极限时,会发生塑性变形。
塑性力学研究材料的塑性行为,包括屈服准则、塑性流动法则等。
三、固体材料的力学性能(一)强度特性强度是固体材料抵抗破坏的能力,包括抗拉强度、抗压强度、抗剪强度等。
材料的强度特性与其化学成分、组织结构和加工工艺等因素密切相关。
(二)刚度特性刚度是指固体材料抵抗变形的能力,通常用弹性模量来衡量。
不同材料的弹性模量差异较大,这决定了它们在受力时的变形程度。
(三)韧性和脆性韧性材料在断裂前能够吸收较多的能量,具有较好的抗冲击性能;脆性材料则在断裂前几乎不发生塑性变形,断裂突然发生。
四、固体力学的研究方法(一)理论分析方法通过建立数学模型,运用力学基本定律和方程求解应力、应变和位移等物理量。
(二)实验研究方法通过实验测量材料的力学性能和结构的响应,为理论分析提供验证和补充。
(三)数值模拟方法利用计算机软件对固体力学问题进行数值求解,如有限元法、有限差分法等。
五、固体力学在工程中的应用(一)机械结构设计在机械零件和设备的设计中,需要考虑材料的力学性能和受力情况,以确保结构的强度、刚度和稳定性。
工程力学(材料力学)-4-材料力学的基本概念
弹性杆件ห้องสมุดไป่ตู้外力与内力
截面法
工 程 力 学
当用假想截面将杆件截开,考察其中任意一部分 平衡时,实际上已经将这一部分当作刚体,所以所 用的平衡方法与在工程静力学中的刚体平衡方法完 全相同。
第4章 材料力学的基本概念
工 程 力 学
4.3弹性体受力与变形特征
返回
弹性体受力与变形特征
工 程 力 学
以上两方面的结合使材料力学成为工程设计(engineering design)的重要组成部分,即设计出杆状构件或零部件的合理形 状和尺寸,以保证它们具有足够的强度、刚度和稳定性。
第4章 材料力学的基本概念
工 程 力 学
4.1关于材料的基本假定 4.2弹性杆件的外力与内力 4.3弹性体受力与变形特征
工程力学
工 程 力 学
第二篇 材料力学
工程力学
第二篇 材料力学
工 程 力 学
材料力学(strength of materials)主要研究对象是 弹性体。对于弹性体,除了平衡问题外,还将涉及到 变形.以及力和变形之间的关系。此外,由于变形, 在材料力学中还将涉及到弹性体的失效以及与失效有 关的设计准则。 将材料力学理论和方法应用于工程,即可对杆类 构件或零件进行常规的静力学设计,包括强度、刚度 和稳定性设计。
由于整体平衡的要求,对于截开的每一部分也必须是平衡 的。因此,作用在每一部分上的外力必须与截面上分布内力相 平衡,组成平衡力系。这是弹性体受力、变形的第一个特征。 弹性体受力后发生的变形也不是任意的,必须满足协调 (compatibility)一致的要求。这是弹性体受力、变形的第二个 特征。
A
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由此面元变换公式也可表为
ni dA = JX l , i N l dA0
面积变 换公式
1.5 Green和Almansi应变张量 Green和Almansi应变张量
设初始和现时位形中P 设初始和现时位形中P、Q两点 的距离分别为 dX i dxi 研究变形前后线段尺度的变化 可以获得变形的度量-应变 可以获得变形的度量-
物体运动和变形是单值和连续的,也即在任一时刻, 物体运动和变形是单值和连续的,也即在任一时刻,x i 是一一对应的, 和 X i 是一一对应的,那么在参考位形的任意点Jacobi行 不为零。 列式J不为零。也即变形梯度可逆 ∂xi ∂xi = xi , X j = xi , j J= ≠0 ∂X j ∂X j
dx
" 2
dx
" 3
dx 1 ' dV = dx 1 " dx 1
dx 2 ' dx 2 dx
" 2
∂x j ∂x i ' ∂x k " ∂X j dX l dX m dX n = e ijk ∂X m ∂X l ∂X n dxi = xi , j dX j 因此, 因此,现时位形的体积可表为 ∂xi ∂x j ∂xk ' " ' " = elmn JdX l dX m dX n dV = eijk dX l dX m dX n ∂X l ∂X m ∂X n " 体积变换公式 = Je ijk dX i dX 'j dX k = JdV0
∂xk ∂xk δ ij − ∂X k ∂X k dxi dx j dxi dxi − dX i dX i = − δ ij dX i dX j= ∂X ∂X ∂xi ∂x j j i 1 ∂x k ∂x k ∂X k ∂X k 1 − δ ij E ij = e ij = δ ij − ∂X i ∂X j 2 2 ∂x i ∂x j 阿尔曼西张量 格林应变张量
这表明,当位移梯度很小时,可以不区分初始位形和现时位 这表明,当位移梯度很小时, 位移梯度分量的乘积项是高阶小量,将其略去后, 形,位移梯度分量的乘积项是高阶小量,将其略去后,即可 柯西应变得到小变形时的柯西应变 得到小变形时的柯西应变-工程应变
1 E ij = ( u j , X i + ui , X j + uk , X i uk , X j ) 2 1 e ij = ( u j , xi + ui , x j − uk , xi uk , x j ) 2 1 ε ij = E ij = e ij = ( u j , xi + ui , x j ) 2
固体力学大变形基本知识
1. 物体运动的物质描述 2. 格林和阿尔曼西应变 3. 物体运动等的空间描述和变形率 欧拉、 4. 欧拉、拉格朗日和克希荷夫应力 5. 大变形时平衡方程和虚位移原理 6. 大变形本构关系
1.1 物体运动的物质描述-拉格朗日描述 物体运动的物质描述t=0的坐标为Xi, t =0的坐标为 的坐标为X 时刻位置为x 时刻位置为xi,质点 运动可表为
∂ui 位移对坐标( 位移对坐标( ∂X j
度张量。 度张量。
∂ui ∂x j
)的偏导数,称为位移梯 的偏导数,称为位移梯
1.5 Green和Almansi应变张量 Green和Almansi应变张量
将变形梯度张量代入两种应变的表达式,可得用位 将变形梯度张量代入两种应变的表达式, 移梯度张量表示的应变公式如下
dx 3 ' " dx 3 = e ijk dx i dx 'j dx k = " dx 3 ∂x
变形梯度
i
= xi , X j = xi , j
∂xi ∂x j ∂x k elmn J = eijk xi , l x j , m x k , n = eijk ∂X l ∂X m ∂X n
1.4、面积变换公式 1.4、 如果记初始和现时 位形的密度分别为 ρ0 和 ρ 则由质量守恒, 则由质量守恒,可得 ρ 0 体积变换公式 dV J= = dV dV 0 ρ 因此对不可压缩物体 N i dA0 = eijk dX i dX j dX k' J =1 仿体积的上述说明, 仿体积的上述说明,图示面元可表为 ' ' ni dA = e ijk dx j dx k N i dA0 = e ijk dX j dX k ∂x i ∂x i ' ni dA = e ijk dx j dx k = 又因 ∂X l ∂X l
由此公式可见,两种应变张量都是对称的。类似弹(塑) 由此公式可见,两种应变张量都是对称的。类似弹( 性力学的应变分析(与主应力分析相仿),可以证明,体内 性力学的应变分析(与主应力分析相仿),可以证明, ),可以证明 任一点处至少有三个相互垂直的应变主轴, 任一点处至少有三个相互垂直的应变主轴,任两与主轴平行 的物质线元,变形过程中仍保持垂直。 的物质线元,变形过程中仍保持垂直。
格林应变张量用初始位形定义,也即用变形前的坐标定义它是 格林应变张量用初始位形定义,也即用变形前的坐标定义它是 lagrange坐标的函数 阿尔曼西应变张量用现时位形定义, 坐标的函数。 lagrange坐标的函数。阿尔曼西应变张量用现时位形定义,它是 Euler坐标的函数 Euler坐标的函数。
1.5 Green和Almansi应变张量 Green和Almansi应变张量 质点的位移向量也同样可用初始位形和现时 位形定义 ui ( X j , t ) = x i ( X j , t ) − X i 初始坐标的函数 ui ( x j , t ) = x i − X i ( x j , t ) 现时坐标的函数 上式对lagrange坐标或对Euler 上式对lagrange坐标或对Euler坐标求偏导,可 lagrange坐标或对Euler坐标求偏导 得变形梯度张量分别为 ∂X i ∂u i ∂x i ∂u i = δ ij − = + δ ij ∂x j ∂x j ∂ X j ∂X j
1 E ij = ( u j , X i + ui , X j + uk , X i uk , X j ) 2 1 e ij = ( u j , xi + ui , x j − uk , xi uk , x j ) 2
∂X k ∂X k 1 e ij = δ ij − 2 ∂x i ∂x j 阿尔曼西张量 格林应变张量 ∂x i ∂u i ∂X i ∂u i = + δ ij = δ ij − ∂X j ∂X j ∂x j ∂x j ∂uk 1 ∂uk Eij = ( + δ ki )( + δ kj ) − δ ij 2 ∂X i ∂X j ∂uk 1 ∂uk ∂uk ∂uk = + δ kj + δ ki + δ kiδ kj − δ ij ∂X ∂X ∂X i ∂X j 2 i j 1 1 = uk , X i uk , X j + ui , X j + u j , X i + δ ij − δ ij = uk , X i uk , X j + ui , X j + u j , X i 2 2
1 ∂x k ∂x k E ij = − δ ij 2 ∂X i ∂X j
(
) (
)
当位移梯度远小于1 当位移梯度远小于1时,对任意函数F有如下关系 对任意函数F
∂F ∂x i ∂F = ∂X j
具 ∂F ∂X j ∂F ∂ 有 (x j − uj ) = = = 相 ∂X j ∂x i ∂X j ∂ x i 同 ∂u j ∂u j ∂F ∂F ∂F 量 (δ ij − )= − ≈ ∂x i ∂X i ∂X j ∂x i ∂X i 级
1.4、面积变换公式 1.4、
∂ x i ∂x j ∂ x k 面积变 ' dX m dX n = e ijk 换公式 ∂X l ∂ X m ∂X n ' x i , l ni dA = e lmn JdX m dX n = JN l dA0
' 根据变形梯度张量可逆 根据变形梯度张量可逆 N i dA0 = e ijk dX j dX k ∂xi ∂X l = xi ,l X l ,i = δ ii = 1 ∂X l ∂xi
J = eijk xi ,1 x j ,2 xk ,3
e123 J = e ijk x i , 1 x j , 2 x k , 3 = 定义 = J e 231 J = e ijk x i , 2 x j , 3 x k , 1 = 列互换二次 = J e 312 J = e ijk x i , 3 x j , 1 x k , 2 = 列互换二次 = J e 321 J = e ijk x i , 3 x j , 2 x k , 1 = 列互换一次 = − J e 213 J = e ijk x i , 2 x j , 1 x k , 3 = 列互换一次 = − J e132 J = e ijk x i , 1 x j , 3 x k , 2 = 列互换一次 = − J e lmm J = e ijk x i , l x j , m x k , m = 两列相同 = 0
xi = xi ( X j , t ) 对物体t时刻位置 对物体t时刻位置 和变形的刻划称为构 形或位形,如图示。 形或位形,如图示。
描述运动的参照基准称为参考位形 描述运动的参照基准称为参考位形,以初 参考位形, 始位形作参考位形的描述称为物质描述 物质描述或 始位形作参考位形的描述称为物质描述或拉 格朗日描述, 称为物质坐标 物质坐标。 格朗日描述,Xi称为物质坐标。
由此可见,e lmn J = e ijk x i , l x j , m x k , n 成立 由此可见,