信号与系统第二章讲解
信号与系统 第二章ppt剖析
第
例1 求并联电路的端电压 vt 与激励 is t 间的关系。
7 页
电阻
iR t
1 R
vt
电感
iLt
1 L
t v d
ist
电容
iC
t
C
dv d
t
t
iR iL R LC
a ic
vt
b
根据KCL iRt iLt iC t iS t
系统的完全响应
第 17
页
求出齐次解rh t 和特解rp t 相加即得方程的完全解:
n
rt Aieit rp t i 1
利用初始条件求待定系数Ai 我们一般将激励信号加入的时刻定义为t=0,响应
的求解区间定为 t ,如0 果响应在0时刻没有跳变,通常
取t=0,这样对应的一组条件称为初始条件。
1
2
10
B1
, 3
B2
, 9
B3 27
所以,特解为
rp t
1 3
2 9
t
10 27
第 15
页
(2)
(原方程:
d2 rt
dt2
2
d rt
dt
3r t
d et
dt
et
)
当et et时, 很明显, 可选rt Bet。这里,B是待定系数。
代入方程后有:
Bet 2Bet 3Bet et et
于是,特解为 1 et。 3
B 1 3
几种典型激励函数相应的特解
第 16
页
激励函数e(t)
E(常数)
响应函数r(t)的特解
信号与系统第二章第一讲

则相应于1的k阶重根,有k项:
( A1t k 1 A2t k 2 Ak 1t Ak )e1t ( Ai t k i )e1t
i 1
k
例2-3
信 号 与 系 统
求如下所示的微分方程的齐次解。
Hale Waihona Puke d3 d2 d r (t ) 7 2 r (t ) 16 r (t ) 12r (t ) e(t ) 3 dt dt dt
等式两端各对应幂次的系数应相等,于是有:
信 号 与 系 统
特解为: 联立解得:
3B1 1 4 B1 3B2 2 2 B 2 B 3 B 0 2 3 1
统
线性时不变系统
线性的常系数微分方程
按照元件的约束特性及 系统结构的约束特性
也即:
具体系统物理模型
常系数微分方程建立
(1)元件端口的电压与电流约束关系
iR (t ) R
信 号 与 系 统
vR (t )
C
vR (t ) iR (t ) R
dvC (t ) iC (t ) C dt
vR (t ) Ri R (t )
与
时域经典法就是直接求解系统微分方程的方法。这种方 系 法的优点是直观,物理概念清楚,缺点是求解过程冗繁,应 用上也有局限性。所以在20世纪50年代以前,人们普遍喜欢 统 采用变换域分析方法(例如拉普拉斯变换法),而较少采用时 域经典法。20世纪50年代以后,由于δ(t)函数及计算机的普 遍应用,时域卷积法得到了迅速发展,且不断成熟和完善, 已成为系统分析的重要方法之一。时域分析法是各种变换域 分析法的基础。
信 号 与 系 统
is (t )
信号与系统第2章信号的复数表示

3
j
π
j
π
4
C1 + C 2 = (1 + 1) + j ( 3 + 1) = 2 + j ( 3 + 1)
2 C1 = 2 + j ( 2 3 ) = 2 2 e
j
= 4e
j
π
3
C1 C 2 = 1 + j 3 + j 3 3 = (1 3 ) + j ( 2 3 )
= 2 2e
j(
π
3
+
π
4
)
= 2 2e
j(
7π ) 12
2 复数中定义 j = 1 ,故 D = (a1a2 b1b2 ) + j(a1b2 + b1a2 )
换一种形式表示复数的乘法
D = C1 C2 = C1 e C2 e = C1 C2 e
j1 j2
= C1 C2 e j1 e j2
j (1 +2 )
复数的加法和乘法在复平面内的表示
复数加法
2、复平面形式
可以在复平面中表示复数
虚轴 b |C| a
复数C可表示成一个矢量
实轴
由图可以看出,矢量 的长度为复数的模,与 实轴的夹角为复数的辐 角
2.3 复数形式的运算
1、复数的数乘和共轭
数乘: k 为实数
虚轴 j
kC C
实轴
kC = ka + jkb
| kC | e j k ≥ 0 kC = | kC | e j ( +π ) k < 0
2、复数的加法和乘法
C1 、 C2 为复数, C1 = a1 + jb1 , C2 = a2 + jb2
信号与系统-第2章
f (t)
K
两式相加:
cosωt =
1 2
(e
jωt
+
e
jωt )
(2-4)
0 K
t
两式相减:
sinωt =
1 2j
(e
jωt
-e
jωt )
(2-5)
(3) 复指数信号: f(t) = Ke st = Ke (σ+ jω)t
= Keσt (cosωt + j sinωt)
当 σ > 0 时为增幅振荡 ω = 0 时为实指数信号 σ < 0 时为衰减振荡
2
01
t
f(
1 2
t)
=
1 2
t
0
0<t <4 其它
f(12 t)
2 0
4t
注意: 平移、反折和展缩都是用新的时间变量去代换原来的
时间变量, 而信号幅度不变.
t +2 -2<t<0 例2-5:已知 f(t) = -2t + 2 0<t<1
f (t)
2
0
其它
-2 0 1
t
求 f(2t-1),
f(
1 2
(1) 相加和相乘
信号相加: f t f1t f2 t fn t 信号相乘: f t f1t f2 t fn t
0 t<0 例2-1:已知 f1(t) = sint t ≥ 0 , f2(t) =-sint, 求和积.
解: f1(t) + f2(t) =
-sint 0
t<0 t≥0
0
t<0
f1(t) f2(t) = -sin2t t ≥ 0 也可通过波形相加和相乘.
∞ t=0 作用: 方便信号运算.
信号与系统讲义-2

f (t) u 3 10
p
u pf (t) 2p 10
u(t) (Ae5t B)U(t)
2 du(t) 10u(t) df (t)
dt
dt
u(t) 5Ae5t U(t) (A B)(t)
2(A B) 1 B0
u(t) 1 e5tU(t)V 2
H
(
p)
2p2 8p 3 ( p 1)( p 3)2
求系统的响应 y(t)。
解: D(p) (p 1)(p 3)2 0 p1 1 p2 p3 3
y0 (t) K1e t K 2e3t K 3te3t
y0 (0 ) K1 K2 =2 y0 (0 ) K1 3K 2 K3=1
3、共轭复根:(欠阻尼) 即 R 2 L C
uc Aet cos(dt ) Us
R 2L
,
d
02 2 , 0
1 LC
4
三、 RLC串联电路全响应
d 2uc dt 2
R L
duc dt
1 LC
uc
1 LC Us
(二阶常系数线性非齐次微分方程)
t<0 , K在2,有 uc (0 ) U0
C
uc Aep1t Be p2t Us
2、重根:(临界阻尼) 即
R2
L C
(自然频率、固有频率)
uc (A Bt)ept Us
3、共轭复根:(欠阻尼) 即 R 2 L C
uc Aet cos(dt ) Us
R 2L
d 02 2
信号与系统课件(郑君里版)第二章
e ,t≥0;y(0)=2,y’(0)= 2 t ,t≥0;y(0)= 1, e
t
-1
y’(0)=0时的全解。
解: (1) 特征方程为
2 + 5λ+ 6 = 0
其特征根λ1= – 2,λ2= – 3。 齐次解为
yh (t ) C1e2t C2e2t
由表2-2可知,当f(t) = 2 e t
y fh (t ) C f 1e
2t
C f 2e
t
其特解为常数 3 , 于是有
y f (t ) C f 1e2t C f 2et 3
C1 1 C 2 4
根据初始值求得:
y f (t ) e2t 4et 3,t 0
四.系统响应划分
自由响应+强迫响应 (Natural+forced) 暂态响应+稳态响应 (Transient+Steady-state) 零输入响应+零状态响应 (Zero-input+Zero-state)
零输入响应
2.2 冲激响应和阶跃响应
一.冲激响应 1.定义 系统在单位冲激信号δ(t) 作用下产生的零状态响 应,称为单位冲激响应,简称冲激响应,一般用h(t)表 示。
t
ht
H
[例2.2.1] 描述某系统的微分方程为y”(t)+5y’(t)+6y(t)=f(t)求其 冲激响应h(t)。
相互关系
零输入响应是自由响应的一部分,零状态响应有自由响 应的一部分和强迫响应构成 。
y (t ) e 2t 3 y x (t ) y f (t ) (2e 2t 4e t ) (e 2t 4e t 3),t 0
《信号与系统》第二章总结

其中rzsh (t )和rzsp (t )分别为如下方程的齐次解和特解 zsp d n rzs (t ) d n −1rzs (t ) dr (t ) C0 + C1 + L + Cn −1 zs + Cn rzs (t ) dt n dt n −1 dt d m e(t ) d m −1e(t ) de(t ) = E + E1 + L + Em −1 + Em e(t ), m −1 0 dt m dt dt (k ) rzs (0− ) = 0
则h(t )为t ≥ 0+时满足起始态为零的微分齐次方程的解
n α t 当n > m时,h(t ) = ∑ Ak e k u (t ) k =1 (设特征方程的根为n个单根α k)
当n ≤ m时,h(t )还须含δ ( m − n ) (t )、δ ( m − n −1) (t )、 、δ (t ), L 而各项系数由Em决定
•连续时间系统的时域分析法:不通过任何变换,直接求解 求解系 求解 统的微分 微分、积分方程 方程。 微分 方程 •连续时间系统的时域分析方法:经典法,卷积法,算子法。
设n阶复杂系统激励信号为e(t ),响应信号为r (t )
其n阶微分方程为 d n r (t ) d n −1r (t ) dr (t ) C0 + C1 + L + Cn −1 + Cn r (t ) n n −1 dt dt dt d m e (t ) d m −1e(t ) de(t ) = E0 + E1 + L + Em −1 + Em e(t ) m m −1 dt dt dt
信号与系统第二章ppt课件
30
第2章 连续信号与系统的时域分析 31
最后整理得
第2章 连续信号与系统的时域分析
波形如题解图2.6(b)所示。
32
第2章 连续信号与系统的时域分析
3
(2) 因为
第2章 连续信号与系统的时域分析
所以
4
第2章 连续信号与系统的时域分析
2.2 写出下列复频率s所表示的指数信号est的表达式,并画 出其波形。
(1) 2; (2) -2; (3) -j5; (4) -1+j2。
5
第2章 连续信号与系统的时域分析
解 (1) f1(t)=e2t,波形如题解图2.2(a)所示。 (2) f2(t)=e-2t, 波形如题解图2.2(b)所示。显然, f1(t)和f2(t)都 是实指数信号。 (3) f3(t)=e-j5t=cos5t-j sin5t。f3(t)是虚指数信号,其实部、 虚部分别是等幅余弦、正弦信号。实部信号波形如题解图2.2(c) 所示。 (4) f4(t)=e(-1+j2)t=e-t·ej2t=e-t(cos2t+j sin2t)。f4(t)是复指数信 号,其实部和虚部分别是幅度按指数规律衰减的余弦和正弦信 号。实部信号波形如题解图2.2(d)所示。
(4) 由于tε(t)|t=-∞=0,有 所以
38
第2章 连续信号与系统的时域分析
2.8 已知f1(t)和f2(t)如题图2.4所示。设f(t)=f1(t)*f2(t),试求 f(-1)、f(0)和f(1)的值。
题图 2.4
信号与系统(郑君里)第二版 讲义 第二章
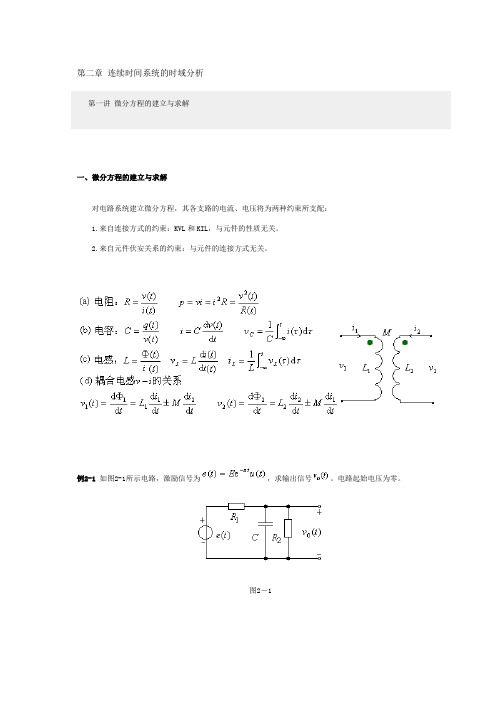
第二章 连续时间系统的时域分析第一讲 微分方程的建立与求解一、微分方程的建立与求解对电路系统建立微分方程,其各支路的电流、电压将为两种约束所支配: 1.来自连接方式的约束:KVL 和KIL ,与元件的性质无关。
2.来自元件伏安关系的约束:与元件的连接方式无关。
例2-1 如图2-1所示电路,激励信号为,求输出信号。
电路起始电压为零。
图2-1解以输出电压为响应变量,列回路电压方程:所以齐次解为:。
因激励信号为,若,则,将其代入微分方程:所以,从而求得完全解:由于电路起始电压为零并且输入不是冲激信号,所以电容两端电压不会发生跳变,,从而若,则特解为,将其代入微分方程,并利用起始条件求出系数,从而得到:二、起始条件的跳变——从到1.系统的状态(起始与初始状态)(1)系统的状态:系统在某一时刻的状态是一组必须知道的最少量的数据,利用这组数据和系统的模型以及该时刻接入的激励信号,就能够完全确定系统任何时刻的响应。
由于激励信号的接入,系统响应及其各阶导数可能在t=0时刻发生跳变,所以以表示激励接入之前的瞬时,而以表示激励接入以后的瞬时。
(2)起始状态:,它决定了零输入响应,在激励接入之前的瞬时t=系统的状态,它总结了计算未来响应所需要的过去的全部信息。
(3)初始状态:跳变量,它决定了零状态响应,在激励接入之后的瞬时系统的状态。
(4)初始条件:它决定了完全响应。
这三个量的关系是:。
2.初始条件的确定(换路定律)电容电压和电感电流在换路(电路接通、断开、接线突变、电路参数突变、电源突变)瞬间前后不能发生突变,即是连续的。
时不变:时变:例电路如图2-2所示,t=0以前开关位于"1"已进入稳态,t=0时刻,开关自"1"转至"2"。
(1)试从物理概念判断、和、。
(2)写出t>0时间内描述系统的微分方程式,求的完全响应。
图2-2解(1)换路前电路处于稳态电感相当于短路,电感电流,电容相当于开路= 0,= = 0。
信号与系统第二章
§2.1 经典时域解法
2 连续时间信号与系统的时域分析
2.1.1 微分方程式的建立与求解
1.物理系统的模型
•许多实际系统可以用线性系统来模拟。
•若系统的参数不随时间而改变,则该系统可以用
线性常系数微分方程来描述。
2 连续时间信号与系统的时域分析
•根据实际系统的物理特性列写系统的微分方程。 •对于电路系统,主要是根据元件特性约束和网络
2 连续时间信号与系统的时域分析
2 冲激函数匹配法 配平的原理:t =0 时刻微分方程左右两端的δ(t) 及各阶导数应该平衡.
【例】
d y t 3 y t 3 t 已知y0 , 求y0 dt
ut : 表示0 到0 相对单位跳变函数
该过程可借助数学描述
所以系统响应的完全解为
需要注意的: 特解的函数形式由系统所加的激励决定,齐次解 的函数形式完全取决于特征方程的根。 由于构成系统的各元件本身所遵从的规律、系统 的结构与参数决定了微分方程的阶次与系数,因此, 齐次解只与系统本身特性有关。
2 连续时间信号与系统的时域分析
2.1.2 从 到 状态的转换
2 连续时间信号与系统的时域分析
齐次解:由特征方程→求出特征根→写出齐次解形式 注意重根情况处理方法。 特 解:根据微分方程右端函数式形式,设含待定系 数的特解函数式→代入原方程,比较系数 定出特解。
完全解:齐次解和特解相加, 齐次解中的待定系数可通过初始条件求得.
在系统分析中,响应区间定义为激励信号 加 入后系统的状态变化区间。系统响应的求解区间为
a 3 即 b 9 c 9
即 y0 y0 9
2 连续时间信号与系统的时域分析
冲激函数匹配法实现过程中应注意的问题: (1) 对于冲激函数只匹配 及其各阶导数项, 微分方程两端这些函数项都对应相等。 (2) 匹配从方程左端 的最高阶项开始,首 先使方程右端冲激函数最高阶次项得到匹配,在已 匹配好的高阶次冲激函数项系数的条件下,再匹配 低阶项。 (3) 每次匹配方程低阶冲激函数项时,如果方 程左端所有同阶次冲激函数各项系数之和不能和右 端匹配,则由左端 高阶项中补偿。
信号与系统第二章课件

(t 0)
18
连续系统的时域求解(例)
例.(2.4-1)系统 r (t ) r (t ) r (t ) e(t ) e(t ) 解: 2 1 0 1,2 0.5 j 0.5 3 求h (t)和g (t)。
1
在所选专用树的单树支割集、单连支回路方程中列方程
消去其它变量,得 i(t) 的微分方程
3 2 L C uc (t ) 1 H F 1 4
i(t ) 7i(t ) 10i(t ) e(t ) 6e(t ) 4e(t )
2nd.确定初始值/定解条件
i (0 ), i(0 )
[前例]
m n ( i ) ( j) ai rzs (t ) b j e (t ) j0 i 0 (k ) rzs (0 ) 0
求全响应:
13
第二章 连续时间信号与系统的时域分析
§2.5 系统的零状态响应 2.
n (i ) r(t )求解:先求零输入响应 a r i zi (t ) 0 即解零输入方程(即齐次方程)i 0 (k ) (k ) r ( t ) r ( t ) r ( 0 ) r 经典法得解为: zi h zi (0 ) zi
8
1st. i(t ) 7i(t ) 10i(t ) e(t ) 6e(t ) 4e(t ) nd i ( 0 ) 14 5 ( A ) i ( 0 ) 2( A) 2 .求出初始条件 3rd.解: 2 7 10 0 1 2, 2 5
[求取h(t) ]
1. 作为一种特殊的零状态响应(经典法) 例1:系统 r(t ) 4r(t ) 3r (t ) e(t ) 2e(t ) 求 h(t ) 解: 即解 h(t ) 4h(t ) 3h(t ) (t ) 2 (t ) h ( 0 ) h ( 0 ) 0(无初始储能 )
信号与系统第2章ppt课件
(B) u(t)Limetu(t) 0
假设u(t)的傅立叶变换为:
F ()A ()jB ()
e t u (t ) 的傅立叶变换为 :
依据傅立叶变换具有唯一性:
F e()A e()jB e()
F()li m0Fe()
所以
A()li m0Ae()精选pBpt()li m0Be()
第二章 傅立叶变换
F ()A ()jB () A()li m0Ae() B()li m0Be()
,这种频谱搬移技术在通信系统中
得到广泛的应用。调幅,调频都是
在该基础上进行的。
精选ppt
由此可见,将时间信号f(t)乘以Cs(ω0t) 或Sin(ω0t)
,等效于将f(t)的频谱一分
为二,即幅度减小一半,沿
频率轴向左和向右各平移ω0.
第二章 傅立叶变换
例2 求如下矩形调幅信号的频谱函数
f(t) G (t)c o s 0 t
例7 如图a所示系统,已知乘法器的输入为
f (t) sin(2t) s(t)co3st)(
t
系统的频率响应为:
求输出y(t).
精选ppt
第二章 傅立叶变换
f (t) sin(2t) s(t)co3st)(
t
乘法器的输出信号为: x(t)f(t)s(t)
依频域卷积定理可知:X(j)21F(j)*S(j) 这里 f(t)F(j) s(t)S(j)
精选ppt
第二章 傅立叶变换
11周期信号的傅里叶变换
周期信号的频谱------用傅里叶级数表示。 非周期信号的频谱——用傅里叶变换表示。 周期信号的频谱可以用傅里叶变换表示吗? (1)正弦、余弦信号的傅里叶变换 直流信号的博立叶变换为
信号与线性系统第二章ppt课件

利用计算机求解,这就是卷积积分的数值计算。
.
单位冲激函数的工程定义:
(t) 0
t 0 t 0
和
(t)dt1
单位冲激函数的工程定义直观地反映了它出现时间极短和面
积为1两个特点。从它t=0时函数值趋于无穷大,可以看出,
不是通常意义下的函数。人们将这类非常规函数称为广义函
数(generalized function),或称分配函数(distribution
function)。这类函数的数学定义不是象普通函数那样,由对
应于自变量的变化值所取的函数值来定义,而是由它对另一
个函数(常称为测试函数)的作用效果来定义的,也就是说,
不是用它“是”什么来定义,而. 是用它能“做”什么来定义 的。
单位冲激函数的严格的数学定义。
(t)(t)d t (0)
(2.1-4)
y(t) x()h(t)d
t1
(2.3-14)
更一般的确定卷积积分的积分限的方法将在下一节中进一步
进行分析讨论。 .
2.4 卷积的图解和卷积积分限的确定 上一节讨论了一般形式的卷积积分,以及x(t)和h(t)均为有始
函数时积分上下限的表示方法,但实际上卷积积分限还要根 据具体情况来确定,特别是当x(t)和h(t)两者或两者之一是分段 定义的函数时,图解能帮助正确地确定卷积积分的上下限。
2.4.2 卷积的另一种计算方法 如果x(t)和h(t)两者或两者之一是分段连续的函数时,采用式 (2.3-14)进行卷积计算也是一种较为简便的方法。 2.5 卷积积分的性质 作为一种数学运算方法,卷积积分具有某些特殊的性质。利 用这些性质可使卷积运算大为简化。
信号与系统第二章 总结

第二章 总结一﹑LTI 连续系统响应(一)微分方程经典解法=解开方式:全解y (t )=通解)(特解)(t y t y p n + 1﹑通解(齐次解):令右侧为零由特征方程n a +n λ1-n a +1-n λ…+0a a 01=+λ确定通解形式,再由n 个+0初始条件确定系数。
总结:齐次解模式由系统决定,系数由n 个初始条件决定,有时与f (t )有关。
2﹑特解:函数形式与f (t )有关,根据f (t )形式选择特定形式后,代入原微分方程,球的系数。
3﹑全解:) y (t )=)()(t y t y p n + 响应。
)又称强迫响应或受迫(响应;)又称自由响应或固有(t y t y p n (二)初始条件与-00+(1)经典系统的响应应限于到正无穷范围。
+0(2)不能将{)(-n 0y }作为微分方程初始条件。
(3){)(+0y n }由{)(-n 0y }导出,{)(+0y n }又称导出初始条件。
(三)零输入响应与零状态响应y (t )=)()(t y t y zs zi + 定义求解:(1)求解zi y :微分方程→特征方程→特征根→zi y (t )模式→数由{)(-n 0y }确定。
(2))(t y zs 求解:经典法﹑卷积积分法。
二﹑卷积积分卷积积分及其图解计算(1)定义: (2)图解计算:∑=n 1i i i t y a )()(∑=m 1j j j t f b )()(()()()τττd 21⎰∞∞--=t f f t f ττ ),()(.111积分变量改为f t f →)()()()(.22222τττ-−−→−-−−→−→t f f f t f 平移翻转τττd )(.)(.321-⎰∞∞-t f f 乘积的积分:总结:翻卷(翻转+平移)→乘积→积分三﹑卷积的性质:(一)卷积的代数性质:(1) 交换性:(2) 分配性:(3) 结合律: (二)延时特性:卷积的延迟量等于相卷积的两函数卷积之和(三)函数与冲激函数卷积)()()(t f t t f =*δ卷积奇偶性:同偶异奇(四)卷积的导数与积分:1﹑卷积导数:[)()(t f t f 21*]´=)()(t f t f 21*´=)()(,t f t f 21* 推广:)()()()()()(t f t f t f t f n 2n 121-*=* 2、卷积积分)()()()()()(t f dx x f dx x f t f dx x f x f 2t 1t 212t 1*=*=*⎰⎰⎰∞-∞-∞- 若y (t )=)()(t f t f 21*,则)()()()()()(t f t f t y j -i 2j 1i *= (五)相关函数dt t f t f dt t f t )()()(f R 212-112•+=-•=⎰⎰∞∞-∞∞τττ)()( dt t f t f dt t f t )()()(-f R 212-121τττ+•=•=⎰⎰∞∞-∞∞)()( )-(R 2112ττR =)( )()(ττ-R R 1221=自相关函数:若)()()(t f t f t f 21==,则R (τ)称为自相关函数。
信号与系统第二章(陈后金)2PPT课件
x [k]
3
22
1
k
2 1 0 1 2 3
x [ k ] 3 [ k 1 ] [ k ] 2 [ k 1 ] 2 [ k 2 ]
2021/4/8
28
二、基本离散时间序列
5.单位阶跃序列
定义:
u[k] 1
2 1 0 1 2
✓ [k]与u[k]的关系:
[k]u[k]u[k1]
2021/4/8
1 k 0 u[k]0 k 0
k
k
u[k] [n] n 29
二、基本离散时间序列
6.矩形序列
1 0kN1
RN[k]0 otherwise
N 1
R N[k]u[k]u[kN ][km ] m 0 RN[k] 1
k
21 0 1 2
N1
2021/4/8
30
二、基本离散时间序列
7.斜坡序列
即0N = m2p , m = 正整数时,信号是周期信号。
如果0 /2p m/N , N、m是不可约的整数, 则信号的周期为N。
2021/4/8
23
[例]判断下列离散序列是否为周期信号.
1) x1[k] = cos(kp/6)
0 /2p 1/12, 由于1/12是不可约的有理数,
故离散序列的周期N=12。
-1 0 1 2 3
k
➢ 序列的列表表示
表示k=0的位置
x[k]=[0, 2, 0, 1, 3, 1, 0]
2021/4/8
18
二、基本离散时间序列
1.实指数序列
r >1
x[k]Akr, kZ
0< r <1
r <1
《信号与系统》第二章讲
第二章 连续时间系统的时域分析2.1 系统模型为便于对系统进行分析,需要建立系统的模型,在模型的基础上可以运用数学工具对系统进行研究。
一. 模型:模型是系统物理特性的数学抽象,以数学表达式或具有理想特性的符号组合图形来表征系统特性。
由电路图可列出方程:dt t de C t i dt t di RC dtt i d LC t e t Ri dt t di L dt t i Ct)()()()()()()()(122=++=++⎰∞-即:这就是系统的数学模型。
二. 系统模型的建立是有一定条件的:1. 对于同一物理系统在不同条件之下,可以得到不同形式的数学模型。
(参考书中P29)2. 对于不同的物理系统,经过抽象和近似有可能得到形式上完全相同的数学模型。
(参考书中P29)建立系统模型只是进行系统分析工作的第一步,为求得给定激励条件下系统的响应,还应当知道激励接入瞬间系统内部的能量储存情况。
如果系统数学模型、起始状态以及输入激励信号都已确定,即可运用数学方法求解其响应。
一般情况下我们对所求得结果可以作出物理解释赋予物理意义。
综上所述,系统分析的过程,是从实际物理问题抽象为数学模型,经过数学解释后再回到物理实际的过程。
也即:建立数学模型解数学模型对解加于物理解释三. 时域分析方法时域分析:在分析过程中,所涉及到的函数都是时间的函数。
(1)经典方法:求解微分方程(2)卷积积分法(重点内容)2.2 线性时不变系统微分方程的建立分析对象:线性的、时不变系统(非时变系统)教学目标:熟练掌握建立线性系统的微分方程的方法。
重点:电路系统建立微分方程的基本依据。
难点:用网孔电流法及节点电位法列状态方程。
一.一. 电路系统建立微分方程的基本依据1.元件特性约束(电路元件的伏安特性)(1)电阻器:-R由欧姆定律:)( )()(1)(tiRtutuRtiRRRR⋅==或若电阻特性参数与时间无关,即R与流过电阻器的电流或施加的电压大小无关,则此电阻称为时不变电阻或线性电阻。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
B1 3
rp
(t)
1 3
et
齐次解和特解相加即为方程的完全解
n
rt Aieit rp t i 1
三、借助初始条件求待定系数 Ai
对于n阶微分方程,若激励 e是(t) 时t 刻 0加入的,则求解
区间为 。0一组t 边界条件可以给定为响应及其各阶导
E0
dm d
e(t) tm
E1
dm1 e(t) d t m1
Em1
d e(t) dt
Eme(t)
若系统为时不变的,则C、E均为常数,此方程为常系 数的n阶线性常微分方程。
一、齐次解
齐次解是齐次微分方程的解,是形式为 Ae的t 一些指数 函数的线性组合。
C0
dn r(t) dtn
C1
d n1 dt
r(t)
n1
Cn1
d r(t) dt
Cnr(t)
0
令 r(t) Aet ,代入上式。由于 Cn 0,且对任意时间t均 成立,因此有:
C0 n C1 n1 Cn1 Cn 0 特征方程
对应的n个根 1,2 , 为,微n 分方程的特征根。
• 若n个特征根各不相同,则微分方程的齐次解:
n
rh (t) A1e1t A2e2t Anent Aieit i 1 A1, A2 , An由初始条件决定。
第二章 连续时间系统的时域分析
连续时间系统一般是采用高阶微分方程进行描述。
输入-输出法(端口描述法)
时域分析:指对系统的分析与计算全部在时间变量领域内 进行,不通过任何变换。
经典分析:求解系统模型(微分方程) 两种方式
卷积分析:利用单位冲激响应求得零状态响应
2.2 系统数学模型(微分方程)的建立
• 元件约束特性:表征元件特性的关系式。
• 网络拓扑约束:由网络结构决定的电压电流约束关系, 即KVL或KCL。
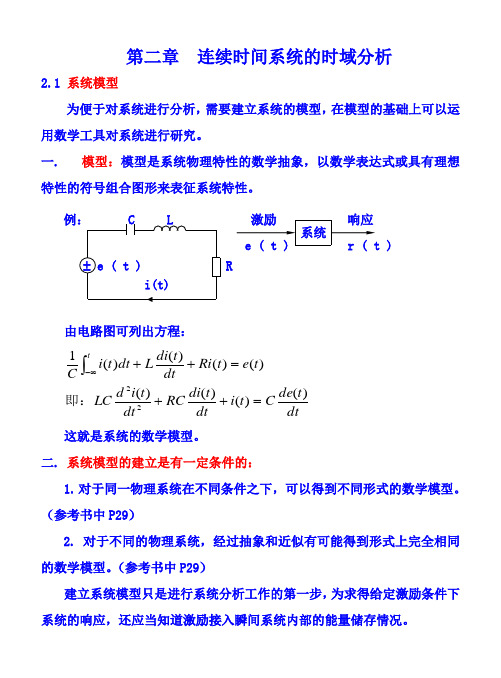
例2-2-1 求并联电路的端电压 v与t 激励 is间t的 关系。 解:以 vt 作变量,各元件的电压电流关系为:
电阻
iR
t
1 R
vt
电感
iL t
1 L
t v d
is t
电容
iC
t
C
d vt
dt
根据KCL iR t iL t iC t iSt
• 若有重根,如 1为 k阶重根,则相应于 1的重根部分 将有 k 项:
(B1t k1 B2t k2 Bk1t Bk )e1t k Bit ki e1t
i1
特征方程 求出特征根 齐次解
例2-3:求微分方程 d3
dt3
r t
7
d2 dt2
rt
16
d dt
r t
12r t
et
i
iR R(t)
iiLL(t)
R
LC
a
iCi c(t)
vt
b
将元件关系代入,并化简
C
d2 vt
dt2
1 R
d vt
dt
1 L
vt
d is d
t
t
二阶微分方程
机械位移系统
k
m
Fs
f
F与St刚 体运动速度 间v的t关系可由推导得到:
m
d2 d
vt
t2
f
d vt kvt
dt
d FSt
dt
二阶微分方程
数在此区间内任一时刻 处的值,t即0
r(t0 ),
d dt
r(t0
),
d2 dt 2
r(t0 ),
d n1 dt n1
r(t0 )
通常取 t0 0 ,有
r(0),
d dt
r(0),
d2 dt 2
r (0),
d n1 dt n1
r(0)
初始条件
记为 r k (0) (k 0,1,, n 1)
由
完全响应
n
rt Aieit rp t i 1 自由响应
强迫响应
借助初始条件,即可建立联立方程组,确定系数 Ai , 从而获得惟一解。
从系统的角度来看,r (t ) 是系统的完全响应,由两部分 组成。特征方程的特征根被称为系统的“固有频率”,因 此可以说齐次解的函数形式仅依赖于系统本身的特性,而 与激励的函数形式无关,称为系统的自由响应或固有响应; 特解的形式由激励信号确定,称为强迫响应。
的齐次解。
解:系统的特征方程
3 7 2 16 12 0
22 3 0
特征根 齐次解
1 2重根, 2 3
rh t A1t A2 e2t A3e3t
二、特解
特解的函数形式与激励函数形式有关。将激励 e代(t)入 微分方程的右端,化简后右端的表达式称为“自由项”。 根据自由项的形式可设定特解的函数表达式,之后代入方 程中,求出特解中的待定系数。
例2-5 如图所示电路,已知激励信号 e(t) sin(,2t)u(t)
初始时刻电容端电压均为零,求输出信号 v2 (的t) 表达式。
R1
R2
解:⑴ 列写微分方程
+
e(t)
-
1 + v1 (t)
-
1 C1
1F 2
d
2v2 (t) dt 2
7
dv2 (t) dt
6v2
不同性质的系统可能具有相同的数学模型。 对于复杂系统,可以用高阶微分方程描述。
2.3 用时域经典法求解微分方程
若线性系统的激励信号为 e(t,) 响应为 r(,t)其数学模型 可用如下高阶微分方程来描述:
C0
dn r(t) dtn
C1
dn1 r(t) d t n1
Cn1
d r(t) dt
Cnr(t)
与几种典型激励函数对应的特解形式
激励函数 e(t) (常数)
tp e t
cos t sin t t pe t sin t t pe t cos t
响应函数r(t)的特解
B(常数)
B1t p B2t p1 Bpt Bp1 Be t
B1 cos t B2 sin t
B1t p B2t p1 Bpt Bp1 e t cos t D1t p D2t p1 Dpt Dp1 e t sin t
例2-4 给定微分方程
d2 d
rt
t2
2
d rt
dt
3rt
d et
dt
et
已知:1 et t2; 2 et et ,分别求方程的特解。
解:1 将et t 2代入方程右端, 得到t 2 2t, 为使等式两端
平衡,特解表达式为:
rp t B1t2 B2t B3 B1, B为2, B待3 定系数
代入方程 3B1t2 4B1 3B2 t 2B1 2B2 3B3 t2 2t
根据等式两端对应幂次的系数相等,有
34BB11
1 3B2
2
2B1 2B2 3B3 0
B1
1 3
,
B2
2, 9
B3
10 27
rp
t
1 3
t
2
2 9
t
10 27
⑵ et et , 特解 rp (t) Bet