计算机图形学第6章
计算机图形学智慧树知到答案章节测试2023年中国地质大学(武汉)

第一章测试1.计算机图形学产生图形,计算机图像学产生图像。
()A:对B:错答案:B2.下列哪项不属于计算机图形学的应用领域?()A:虚拟现实B:游戏实时显示C:科学计算可视化D:计算机辅助设计E:数字电影制作F:识别图片中的动物答案:F3.本课程将讲不讲解以下哪个内容?()A:动画生成B:真实感图像生成C:曲线生成D:游戏制作答案:D4.使用OPENGL画带颜色的直线,需要调用不同的函数,分别指定颜色和起始点坐标。
()A:错B:对答案:B5.在OPENGL中定义的结点仅包含位置信息。
()A:对B:错答案:B第二章测试1.四面体的表面建模中,可用四个三角形来描述四面体的表面,每个三角形包含三个点,因此,四面体中点的总个数为()。
A:12B:6C:4D:9答案:C2.三次BEZIER曲线有几个控制点?()A:3B:5C:4D:6答案:C3.三次BEZIER曲线经过几个控制点?()A:3B:4C:2D:1答案:C4.不经过Y轴的斜线绕Y轴旋转得到的曲面是()A:半球面B:球面C:柱面D:圆台面答案:B5.BEZIER曲线上的所有点都是由控制点经过插值得到的。
()A:错B:对答案:A第三章测试1.通过变换可以将单位圆变成长半轴2短轴0.5的椭圆,具体实施步骤是()。
A:水平方向做平移变换,竖值方向做平移变换B:水平方向做拉伸变换,竖值方向做平移变换C:水平方向做收缩变换,竖值方向做拉伸变换D:水平方向做拉伸变换,竖值方向做收缩变换答案:B2.变换前后二线夹角保持不变的保角变换有()A:镜像B:旋转C:平移D:缩放答案:D3.水平方向的剪切变换,如果表达为x’=ax+by y’=c x+dy,则有()。
A:b=1,c=1,d=0B:a=0,b=1,c=1C:a=1,b=0,d=1D:a=1,c=0,d=1答案:D4.正交变换不包括()。
A:剪切B:镜像C:旋转D:平移答案:A5.变换的复合运算不满足交换律。
图形学第6章曲线曲面

P(0) 2 2 1 P(1) 3 3 2 p(0) 0 0 1 p' (1) 1 0 0
1 P(0) P(1) 1 M h Gh 0 p(0) 0 p' (1)
x(t ) p(t ) y (t ) t n z (t )
a n t 1 a1 a0
cn T C b1 c1 b0 c0 bn
t [0,1]
将边界条件带入该矩阵方程,得
C Ms G
Q(0) P(1)
几何连续性
0阶几何连续性:与0阶参数连续性相同.是指曲线的几何位 置连接,即
p(1) Q(0)
1阶几何连续性:是指一阶导数在相邻段的交点处成比例, 则相邻曲线段在交点处切向量的大小不一定相等。
p (1) Q(0)
2阶几何连续性:是指在相邻段的交点处一阶、二阶导数均 成比例,则相邻曲线段在交点处曲率相等。
要设置足够的边界条件来得到所有系数的值。
描述参数曲线的边界条件有: 端点位置矢量、端点切线矢量、曲率等。对三次参数曲线, 用其端点矢量P(0),P(1).端点切线矢量
则三次Hermite样条曲线:
p (0), p(1)
p(t ) [t 3 t 2
ax b x t 1] cx d x
a y az a b b y bz 3 2 [t t t 1] T C c y cz c dy dz d
对上式求导,得
p(t ) [3 t 2 2t a b 1 0] c d
将边界条件代入,得
计算机图形学第6章二维图形的裁剪
• 重点:掌握二维图形点、线段、多边形和字符的裁剪算法 。
• 难点:理解二维图形的裁剪算法思想并且用C语言进行算法 的实现。
一、裁剪的意义 为了描述图形对象,我们必须存储它的全部信息,但有时为了达到分 区描述或重点描述某一部分的目的,往往将要描述的部分置于一个窗口内, 而将窗口外的部分“剪掉”,这个处理过程叫做裁剪,裁剪在计算机图形 处理中具有十分重要的意义。 裁剪实质上是从数据集合中抽取信息的过程,这个过程是通过一定的 计算方法来实现。
7.2.2 中点分割算法
二、中点分割算法实现: 1、将直线的两端点P1、P2编码得:C1、C2; 2、判别 根据C1和C2的具体值,可以有三种情况: (1)C1=C2=0,表明两端点全在窗口内,因而整个线段也在窗内, 应予保留。 (2)C1&C2≠0(两端点代码按位作逻辑乘不为0),即C1和C2至少 有某一位同时为1,表明两端点必定处于某一边界的同一外侧,因而整个线 段全在窗外,应予舍弃。 (3)不属于上面两种情况,均需要求交点。
如果上面四个不等式中任何一个不满足,则点(x,y)位于窗口之 外。 对于任意多边形窗口,需要根据多边形内点的判别准则进行判断。
7.2 线段的裁剪
直线段的裁剪比点复杂,其裁剪方法又是多边形裁剪和三维图形裁剪的 基础。 一、直线裁剪的基本思想 判断直线与窗口的位置关系: 1.确定直线是完全可见; 2.部分可见; 3.还是完全不可见。 对部分可见线段,求出它与窗口边界的交点,并将窗口内的线段输出。
一、中点分割算法思想: 1、中点公式
7.2.2 中点分割算法
2、中点分割法求交点的规则 如图中所示,当线段P1P2求出中点P后,舍弃线段的哪部分,由下面 两条规则决定:
中点分割法求交点规则
计算机图形学 第6章 曲面

当x0 = x2, y0 = y1时,平面变为矩形平面,矩形 平面是平面的特例,其中一种参数方程为 x = x0 + (x1 - x0)u y = y0 + (y2 - y0)v z=0 u,v[0,1]
(2) 双线性曲面
给定任意4个角点的坐标值,可构成如下参数方程的双线性曲 面: x = x00 (1-u)(1-v) + x01(1-u)v + x10(1-v)u + x11 uv y = y00 (1-u)(1-v) + y01(1-u)v + y10(1-v)u + y11uv z = z00 (1-u)(1-v) + z01(1-u)v + z10 (1-v)u + z11uv
(2) 椭球面
在空间直角坐标系中,(x0, y0 z0)为球心、x方 向的轴为a、y方向的轴为b、z方向的轴为c的 椭球面的参数方程为 x = x0 + acosu cosv y = y0 + bcosu sinv z = z0 + csinu u[-90°,90°] v[0°,360°]
圆球面是椭球面的一个特例,当椭球面参数方 程中的a = b = c时,就是一个圆球面。
第6章 曲 面 生 成
6.1 参数曲面及其生成
三维曲面常用双参数表示: X = x(u,v) Y = y(u,v)
Z = z(u,v)
u∈ [u1,u2],v ∈ [v1,v2]
曲面定义域中的一对(u, v)对应曲面上的一个点。如果u 值固定(为一常数),v值变化,相当于只有一个参数v, 则可得到一条称为u线的曲线;反之,如果v值固定(为 一常数),u值变化,相当于只有一个参数u,则可得到 一条称为v线的曲线。在一定范围内,所有u线与v线组成 一个由曲线网形成的曲面片。曲面片是用于曲面造型的 最简单的数学元素。
研究生计算机图形学_第6章

V
V E V
E: {V}
E E E
E
E: {E} F
E
F
E: {F}
E
V F V
F: {E} F F F F F: {F}
V
图 6.1.5 点、边、面间的连接方式
第6章 几 何造型 3. 欧拉公式
在几何造型过程中,为了保证每一步所产生的形体拓扑关
系都是正确的,需要用欧拉公式进行检验。对于正则形体,其 点(V)、边(E)和面(F)的个数应满足欧拉公式:
第6章 几 何造型
图 6.1.1 圆柱体的线框模型
第6章 几 何造型
Z V1 E1 V2 F5 E1 0 E5 F2 V6 X F3 E4 F1 E2 E9 V5 O E6 V7 E8 E3 V3 E1 1 F6 F4 E7 E1 2 V8 Y V4
图 6.1.2 立方体的线框模型
第6章 几 何造型
V-E+F=2
(6 - 1)
式(6 - 1)只适用于简单的多面体及拓扑同构体, 当多面体 上有通孔及面上有内环时,上述关系不成立。如果将三维空间 中的一个多面体分割成S个多面体,则其顶点、边、面和体的欧 拉公式将变为
V-E+F-S=1
第6章 几 何造型 在几何造型中, 需采用修改后的欧拉公式: V-E+F-R+2H-2S=0 (6-2)
编号如图 6.1.9(b)所示。依次检测八个分体,实体完全不占据的
分体为白结点,实体完全占据的分体为黑结点,实体部分占据 的分体为灰结点。对灰结点再作八等份分割,继续检测与再分 割, 直到达到精度要求的最小单位为止, 如图 6.1.9(c)所示。
第6章 几 何造型
5 1 3 Z O (a) Y X (b) 2 4
计算机图形学第6章课后习题参考答案
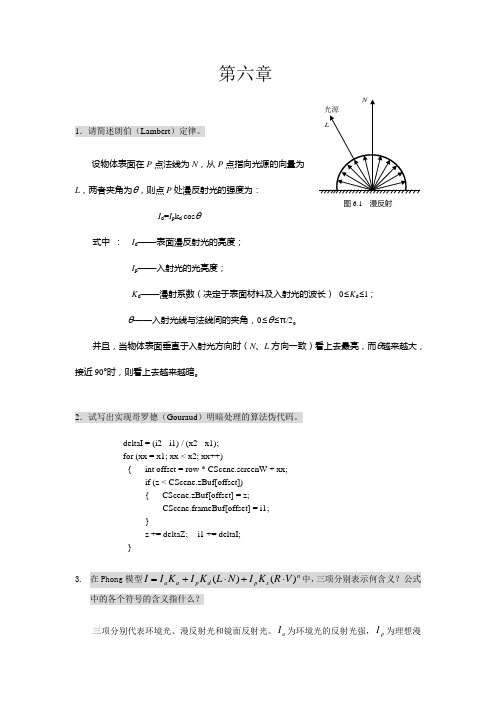
第六章1.请简述朗伯(Lambert )定律。
设物体表面在P 点法线为N ,从P 点指向光源的向量为L ,两者夹角为θ,则点P 处漫反射光的强度为:I d =I p k d cos θ式中 : I d ——表面漫反射光的亮度;I p ——入射光的光亮度;K d ——漫射系数(决定于表面材料及入射光的波长) 0≤K d ≤l ; θ——入射光线与法线间的夹角,0≤θ≤π/2。
并且,当物体表面垂直于入射光方向时(N 、L 方向一致)看上去最亮,而θ越来越大,接近90°时,则看上去越来越暗。
2.试写出实现哥罗德(Gouraud )明暗处理的算法伪代码。
deltaI = (i2 - i1) / (x2 - x1);for (xx = x1; xx < x2; xx++){ int offset = row * CScene.screenW + xx;if (z < CScene.zBuf[offset]){ CScene.zBuf[offset] = z;CScene.frameBuf[offset] = i1;}z += deltaZ; i1 += deltaI;} 3. 在Phong 模型n s p d p a a V R K I N L K I K I I )()(⋅+⋅+=中,三项分别表示何含义?公式中的各个符号的含义指什么?三项分别代表环境光、漫反射光和镜面反射光。
a I 为环境光的反射光强,p I为理想漫反射光强,a K 为物体对环境光的反射系数,d K 为漫反射系数,s K 为镜面反射系数,n 为高光指数,L 为光线方向,N 为法线方向,V 为视线方向,R 为光线的反射方向。
4.试写出实现Phong (冯)明暗方法的伪代码。
for (xx = x1; xx < x2; xx++){ int offset = row * CScene.screenW + xx;if (z < CScene.zBuf[offset]){ CScene.zBuf[offset] = z;pt = face.findPtInWC(u,v);float Ival = face.ptIntensity;CScene.frameBuf[offset] = Ival;}u += deltaU;z += deltaZ;p1.add(deltaPt);n1.add(deltaN);}5.请简述自身阴影的生成方法。
计算机图形学知识要点

单元分解法优缺点
优点
表示简单 容易实现几何变换 基本体素可以按需选择,表示范围较广 可以精确表示物体 物体的表示不唯一 物体的有效性难以保证 空间位置枚举表示----同样大小立方体粘合在一起表示 物体 八叉树表示----不同大小的立方体粘合在一起表示物体 单元分解表示----多种体素粘合在一起表示物体
阴极射线管(CRT):光栅扫描图形显示器; 平板显示器:液晶显示器、等离子体显示板等; 光点、像素、帧缓存(frame buffer)、位平面;三种 分辨率(屏幕、显示、存储); 黑白、灰度、彩色图形的实现方法(直接存储颜色数据、 颜色查找表); 光栅图形显示子系统的结构
基本概念
第四章 图形的表示与数据结构
2、规则三维形体的表示
形体表示的分类 线框模型
缺点 多边形表,拓扑信息: 显示和隐式表示
表面模型
显示表示:在数据结构中显式的存储拓扑结构。例如,翼边结构 表示(Winged Edges Structure) 隐式表示:即根据数据 之间的关系在运行时实
时的解算。 平面方程 多边形网格 分解表示、构造表示、边界表示
Bresenham算法绘制圆弧
基本原理 从(0,R)点,顺时针开始; 上一个确定像素点为p(x, y),则下一个像素点只 能是p1和p2中的一个;
P(x, y) P1(x+1, y)
p2 (x+1, y-1)
误差判据:像素点到圆心的距离平方与半径平方之 差; 一般关系式取值对应的几何意义,即和下一个像素 的对应关系;
3、椭圆的光栅化方法
实体的正则集合运算_计算机图形学实用教程(第3版)_[共2页]
![实体的正则集合运算_计算机图形学实用教程(第3版)_[共2页]](https://img.taocdn.com/s3/m/8e06f814d5bbfd0a78567392.png)
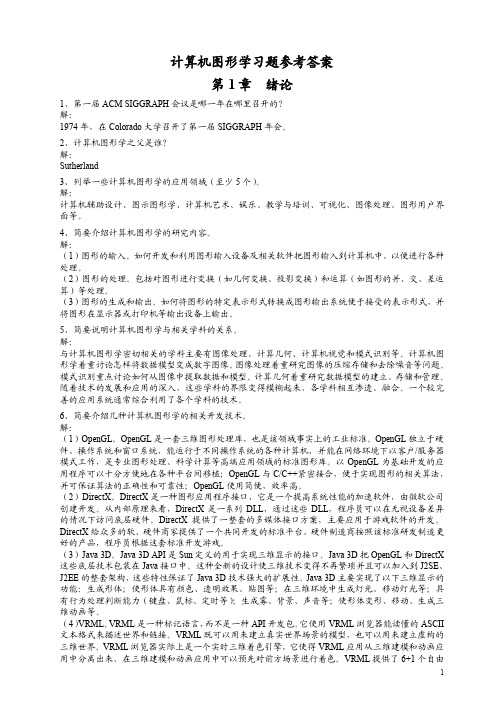
177图6-16 满足广义欧拉公式的非简单多面体对于正则形体,设形体所有表面上的内孔总数为r ,贯穿形体的孔洞数为h ,形体非连通部分的总数为s ,则形体满足如下广义欧拉公式2()v e f r s h −+−=− (6-10)广义欧拉公式(6-10)给出了形体的点、边、面、体、孔、洞数目之间的关系,它仍然只是检查实体有效性的必要条件,而非充分条件。
欧拉公式不仅适用于平面多面体,还适用于任意与球拓扑等价的封闭曲面。
只要在该曲面上构造适当的网格,将实体的表面表示为曲面体网格、曲线段和顶点即可。
欧拉公式是检查任意实体拓扑有效性的有用工具。
6.4.3 实体的正则集合运算并(Union )、交(Intersection )、差(Difference )等集合运算是构造复杂物体的有效方法,也是实体造型系统中的非常有用的工具。
集合并对应于某些机械加工中的焊接或装配,集合差对应于机械加工中的切削加工,集合交无直接的对应工序。
Requicha 在引入正则形体概念的同时,还定义了正则集合运算的概念。
为什么在正则实体造型中,不使用普通的并、交、差等集合运算,而要使用正则集合运算呢?这是因为正则形体经过普通的集合运算后可能会产生悬边、悬面等低于三维的形体,即会产生无效物体,而正则集合运算可以保证集合运算的结果仍是一个正则形体,即丢弃悬边、悬面等。
先以如图6-17(a )所示的二维平面上的物体A 和B 为例,来说明这一问题,在实施集合运算形成物体C 之前,先将物体A 和B 放到图6-17(b )所示的位置上,则执行普通集合理论的交运算的结果如图6-17(c )所示,因为这一结果中有一条悬边,不具有维数的一致性,即不满足正则形体的定义及其应满足的性质,所以它不是一个有效的二维形体,只有去掉这条悬边,得到的如图6-17(d )所示的结果才是有效的,具有维数的一致性。
图6-17 普通集合的交运算和正则集合的交运算。
第6章交互式技术与用户接口
用子程序库设计用户接口,使用方便、 便于扩充,便于在用户自己编写的程序代 码中加入子程序库中的函数,可以充分利 用高级程序设计语言本身具有的功能,实 现用户希望产生的图形和交互处理。但是, 这种方式实现用户界面需要不断地编写、 调试和修改源程序,不形象直观。子程序 库函数的调用格式要随所用主语言而定, 对子程序库的使用应遵循相应主语言对子 程序或函数的调用约定。
6.2.2 基本交互任务和交互技术
交互技术是用户用交互设备把信息输入进计算 机的不同方式,而交互任务是用户输入到计算机的 一个单元信息。最基本的交互任务有四种,即:定 位、字串、选择、取数。对于一个给定的交互任务, 可用多种不同的交互技术来实现,如一个选择任务 可通过鼠标在菜单中选一项,也可用键盘输入选择 项的名字,还可以通过按一个功能键实现选择。类 似的情况是一种交互设备可用于不同的交互任务, 如鼠标既可以用于定位,也可以用于选择。因此, 交互任务是图形系统所要完成的目标,而交互技术 则是完成交互任务的手段,并且交互技术的实现在 很大程度上依赖于交互设备及其支撑环境。
{polyline1,polyline2,polygon,cycle}
中,用户希望选择对象polygon。当输入p时,反馈 显示3个元素polyline1,polyline2,polygon。直到键 入polyg后,只显示唯一的元素polygon,这时用户 就无需再继续输入剩下的字符了,确认后就唯一地 选择了polygon对象。
定量输入任务是指在某个最小值和最大值之间 指定一个数值,例如温度、时间、透明度等数值量 的输入。典型的交互式定量技术有:① 键盘输入数 值;② 调节电位器的阻值产生相应的数值;③ 用 上下翻转数字的计数器选择数值;④ 用光标移动屏 幕上的标度盘或刻度尺上的指针来确定数值。图6.2 是三维交互设备现在还不成熟,从原理上 看,不少二维交互设备,如操纵杆在旋转的 同时允许其可以移动,则可以形成三维效果。 但真正实用的三维交互设备目前已有两种, 一是基于三维传感器的三维坐标测量仪,二 是数据手套。用数据手套可以记录手指的位 置和方向以及手指的运动轨迹,这为构造真 正的三维交互式图形系统及虚拟现实环境奠 定了基础。
【中南大学】计算机图形学习题及答案
计算机图形学作业答案第一章序论第二章图形系统1.什么是图像的分辨率?解答:在水平和垂直方向上每单位长度(如英寸)所包含的像素点的数目。
2.计算在240像素/英寸下640×480图像的大小。
解答:(640/240)×(480/240)或者(8/3)×2英寸。
3.计算有512×512像素的2×2英寸图像的分辨率。
解答:512/2或256像素/英寸。
第三章二维图形生成技术1.一条直线的两个端点是(0,0)和(6,18),计算x从0变到6时y所对应的值,并画出结果。
解答:由于直线的方程没有给出,所以必须找到直线的方程。
下面是寻找直线方程(y =mx+b)的过程。
首先寻找斜率:m =⊿y/⊿x =(y2-y1)/(x2-x1)=(18-0)/(6-0) = 3 接着b在y轴的截距可以代入方程y=3x+b求出 0=3(0)+b。
因此b=0,所以直线方程为y=3x。
2.使用斜截式方程画斜率介于0°和45°之间的直线的步骤是什么?解答:(1)计算dx:dx=x2-x1。
(2)计算dy:dy=y2-y1。
(3)计算m:m=dy/dx。
(4)计算b: b=y1-m×x1(5)设置左下方的端点坐标为(x,y),同时将x end设为x的最大值。
如果dx < 0,则x=x2、y=y2和x end=x1。
如果dx > 0,那么x=x1、y=y1和x end=x2。
(6)测试整条线是否已经画完,如果x > x end就停止。
(7)在当前的(x,y)坐标画一个点。
(8)增加x:x=x+1。
(9)根据方程y=mx+b计算下一个y值。
(10)转到步骤(6)。
3.请用伪代码程序描述使用斜截式方程画一条斜率介于45°和-45°(即|m|>1)之间的直线所需的步骤。
假设线段的两个端点为(x1,y1)和(x2,y2),且y1<y2int x = x1, y = y1;float x f, m = (y2-y1)/(x2-x1), b = y1-mx1;setPixel( x, y );/*画一个像素点*/while( y < y2 ) {y++;x f = ( y-b)/m;x = Floor( x f +0.5 );setPixel( x, y );}4.请用伪代码程序描述使用DDA算法扫描转换一条斜率介于-45°和45°(即|m| ≤1)之间的直线所需的步骤。
第六章路径与矢量图形的概念
矢量图
位图
2.路径的创建和编辑
钢笔工具可创建和编辑矢量图形,它是最基本的路径绘制工 具,工具调板中提供了包括钢笔工具、自由钢笔工具、添加锚点 工具、删除锚点工具和转换点工具,如图所示。
钢笔工具
(1)钢笔工具 使用钢笔工具可以勾画出平滑的曲线路径,在缩放或者变形之 后仍能保持平滑效果,钢笔工具提供了最佳的绘图控制和最高的绘 图准确度,其选项栏如下图所示。
多边形工具的选项栏
(5)直线工具 使用直线工具可绘制直线和箭头的路径和形状。通过设置箭头 参数,可以得到箭头图案。
直线工具选项栏
箭头图案
(6)自定形状工具 使用自定形状工具可绘制出多种复杂图案的路径和形状。
自定义形状工具的选项栏
6.上机练习
(1)制作标志
操作步骤:
A.绘制圆形路径
在“工具”调板中选择椭圆工具,按Shift键的同时,在页面上 拖动出一个圆形路径;拖动圆形路径,按Alt键复制出第2个、第3个 和第4个圆形路径,使用路径选择工具,将所有圆形路径选中,将4个 路径进行对齐和平均分布。
(2)自由钢笔工具 使用自由钢笔工具就像使用铅笔在纸上绘画一样随意,绘制 路径时可自动添加锚点,图6-5为自由钢笔工具选项栏。
自由钢笔工具选项栏
在选项栏中点按形状按钮旁边的反向箭头按钮,勾选磁性的复 选框,可绘制与图像中所定义区域的边缘对齐的路径,然后为 “曲线拟合”输入介于0.5~10.0像素之间的值,此值越高,创建 的路径锚点越少,路径越简单。
C.将选区部分进行复制 执行“编辑”→“拷贝”命令,接着执行“编辑→粘贴”命令, 或者在键盘上依次按下Ctrl+C、Ctrl+V组合键,此时图层调板中将新 生成“图层1”。 D.锁定透明像素 选择“图层1”,在图层调板上点按“锁定透明像素”按钮,透 明区域部分将不可编辑。
计算机图形学(山东联盟)智慧树知到答案章节测试2023年山东财经大学

第一章测试1.在几何造型系统中,描述物体的三维模型有三种,即线框模型、实体模型和________()。
A:色彩模型B:3D模型C:几何模型D:表面模型答案:D2.计算机图形是指由________和_________等非几何要素构成的,从现实世界中抽象出来的图或形()。
A:几何图形B:明暗、灰度(亮度)、色彩C:点、线、面、体等几何要素D:抽象元素答案:BC3.计算机图形学主要研究内容有()。
A:图形的处理B:图形的描述C:绘制D:交互处理答案:BCD4.计算机图形学的主要研究对象有()。
A:图形输入和控制的人机交互界面B:计算机环境下景物的几何建模方法C:几何模型的绘制技术D:模型的处理方法答案:ABD5.凡是能够在人的视觉系统中形成视觉印象的客观对象都称为图形。
()A:错B:对答案:B第二章测试1.根据视图所在的平面建立的坐标系为________()。
A:模型坐标系B:观察坐标系C:世界坐标系D:设备坐标系答案:B2.灰度等级为256级,分辨率为1024*1024的显示器,至少需要的帧缓存容量为 ( )A:512KBB:3MBC:1MBD:2MB答案:C3.计算机图形系统的主要功能有计算、_________等基本功能,它们相互协作,完成图形数据的处理过程()。
A:输出B:交互C:输入D:存储答案:ABCD4.一个计算机图形系统中计算功能有()。
A:图形的平移、旋转、投影、透视等几何变换B:图形之间相互关系的检测C:图形的描述、分析和设计D:曲线、曲面的生成答案:ABCD5.光栅化后的像素存放在缓存里的图形可自动输出到显示屏幕,完成场景的显示,人们就可以通过显示器观看图形。
()A:对B:错答案:B第三章测试1.a计算两物体各表面之间的交线 b建立新物体的边界表示 c对物体表面进行判定分类 d检查两物体是否相交。
如上,当物体采用边界表示时,它们之间的集合运算的具体实现步骤为()。
A:cdabB:cdbaC:dcabD:dacb答案:D2.设正则集合C表示A和B两物体的交,C=A∩B,b(A∩B)=b(A∩iB)∪(bB∩iA)∪(bA∩bB),则b(A∩bB)a-s表示bA∩bB中的______部分()。
计算机图形学第二版(陆枫)课后习题答案部分
计算机图形学第二版(陆枫)课后习题集第一章绪论概念:计算机图形学、图形、图像、点阵法、参数法、图形的几何要素、非几何要素、数字图像处理;计算机图形学和计算机视觉的概念及三者之间的关系;计算机图形系统的功能、计算机图形系统的总体结构。
第二章图形设备图形输入设备:有哪些。
图形显示设备:CRT的结构、原理和工作方式。
彩色CRT:结构、原理。
随机扫描和光栅扫描的图形显示器的结构和工作原理。
图形显示子系统:分辨率、像素与帧缓存、颜色查找表等基本概念,分辨率的计算第三章交互式技术什么是输入模式的问题,有哪几种输入模式。
第四章图形的表示与数据结构自学,建议至少阅读一遍第五章基本图形生成算法概念:点阵字符和矢量字符;直线和圆的扫描转换算法;多边形的扫描转换:有效边表算法;区域填充:4/8连通的边界/泛填充算法;内外测试:奇偶规则,非零环绕数规则;反走样:反走样和走样的概念,过取样和区域取样。
5.1.2 中点 Bresenham 算法(P109)5.1.2 改进 Bresenham 算法(P112)习题解答习题5(P144)5.3 试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。
(P111)解: k<=-1 |△y|/|△x|>=1 y为最大位移方向故有构造判别式:推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):所以有: y Q-kx Q-b=0 且y M=y Qd=f(x M-kx M-b-(y Q-kx Q-b)=k(x Q-x M)所以,当k<0,d>0时,M点在Q点右侧(Q在M左),取左点 P l(x i-1,y i+1)。
d<0时,M点在Q点左侧(Q在M右),取右点 Pr(x i,y i+1)。
d=0时,M点与Q点重合(Q在M点),约定取右点 Pr(x i,y i+1) 。
所以有递推公式的推导:d2=f(x i-1.5,y i+2)当d>0时,d2=y i+2-k(x i-1.5)-b 增量为1+k=d1+1+k当d<0时,d2=y i+2-k(x i-0.5)-b 增量为1=d1+1当d=0时,5.7 利用中点 Bresenham 画圆算法的原理,推导第一象限y=0到y=x圆弧段的扫描转换算法(要求写清原理、误差函数、递推公式及最终画图过程)。
第6章图形裁剪

下面假定裁剪是针对用户坐标系中窗口边界进行的, 裁剪完成后,再把窗口内图形映射到视区。所以裁剪的 目的是显示可见点和可见部分,删除视区外的部分。
第六章 图形裁剪(Clipping)
在用户坐标系中定义的图形往往是大而复杂的,而 输出设备如显示屏幕的尺寸及其分辨率却是有限的,为 了能够清晰地观察某一部分或对其进行某些绘图操作, 就需要将所关心的这一局部区域的图形从整个图形中区 分出来,这个区分指定区域内和区域外的图形过程称为裁 剪,所指定的区域称为裁剪窗口。
在用户坐标中设置观察坐标系,在观察坐标系中定 义一个观察窗口。观察坐标系用来任意设置矩形窗口的 方向。一旦建立了观察参考系,就可以将用户坐标系下 的描述变换到观察坐标系下。
2019/11/18
计算机图形学演示稿 纪玉波制作
2
(C)
2019/11/18
计算机图形学演示稿 纪玉波制作
3
(C)
3.规范化设备坐标系(Normalized Device Coordinates) 在规范化坐标系下(取值范围从0到1)定义视区,将
设备坐标定义,一般也定义成矩形,由其左下角和右上角两
点坐标来定义。所以,用户可以利用窗口来选择需要观察那
一部分图形,而利用视图区来指定这一部分图形在屏幕上显
示的位置。标准的窗口区和视图区一般都是矩形,其各边分
别与坐标轴平行。
2019/11/18
计算机图形学演示稿 纪玉波制作
6
(C)
用户定义的图形从窗口区到视图区的输出过程如下: 从 应 用 程 序 得 到 图 形 的 用 户 坐 标 (WC-World Coordinates)→对窗口区进行裁剪(WC)→窗口区到视图区的 规格化变换(NDC-Normalized Device Coordinate) →视图区 从 规 格 化 设 备 系 到 设 备 坐 标 系 的 变 换 (DC-Device Coordinate)→在图形设备上输出图形。
计算机图形学习题参考答案(完整版)
9、使用中点圆算法,绘制圆心为 (0, 0) ,半径 r 10 的圆在第一象限中的部分。 解:
k (x k, yk) (x k ', yk ') pk 0 (0,10) (10, 0) 1r 9 1 (1,10) (10,1) p0 2x 116 2 (2,10) (10, 2) p12x 2 11 3 (3,10) (10, 3) p2 2x 3 2x 4 12y 4 3 5 (5, 9) (9, 5) p4 2x 5 18 6 (6, 8) (8, 6) p5 2x 6 12y6 5 7 (7, 7)
1
度,可以沿着三个方向移动,也可以沿着三个方位旋转,同时还可以建立与其他三维空间的超链接。 因此 VRML 是超空间的。 7、图形的构成要素有哪些? 解: ① 刻画形状的点、线、面、体等几何要素; ② 反映物体表面属性和材质的灰度、颜色等非几何要素。 8、计算机图形学的最高奖以谁的名字命名,获得第一届和第二届该奖的分别是谁? 解: 计算机图形学的最高奖是以 Coons 的名字命名的, 获得第一届和第二届 Coons 奖的是 Ivan Sutherland 和 Pierre Bézier。
2
11、已知: A(0, 0) 、 B(1, 1) 、 C(2, 0) 、 D(1, 2) ,请判断多边形 ABCD 是否是凹多边形。 解: 多 边 形 的 边 向 量 为 AB (1,1, 0) , BC (1, 1, 0) , CD (1, 2, 0) , DA(1, 2, 0) 。 因 为
第 2 章 基本图元的显示
1、假设 RGB 光栅系统的设计采用 810 英寸的屏幕,每个方向的分辨率为每英寸 100 个像素。如果 每个像素 6 位,存放在帧缓冲器中,则帧缓冲器需要多大存储容量(字节数)? 解: 8100101006/8600000 (字节) 。 2、假设计算机字长为 32 位,传输速率为 1 MIP(每秒百万条指令) 。300 DPI(每英寸点数)的激光打 印机,页面大小为 8.511 英寸,要填满帧缓冲器需要多长时间。 解:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矢量方向相同,大小相等
6.1.6 三次Hermite样条
即 Q1(1)= Q2(0)、Q1’(1)= Q2’(0)、Q1”(1)= Q2”(0)
有 Q1(1)= a3 + a2 + a1 + a0
Q2(0)= b0 因 Q1’(t1)=3a3t1 + 2a2 t1+ a1 Q2’(t2)=3b3 t2+ 2b2 t2+ b1 则 Q1’(1)=3a3 + 2a2+ a1 Q2’(0)= b1 因 Q1”(t1)=6a3t1 + 2a2 Q2”(t2)=6b3t2 + 2b2 则 Q1”(1)=6a3+ 2a2 Q2”(0)= 2b2
6.1.6 三次Hermite样条曲线
令
1 2 2 1 3 3 2 1 Mh Hermite矩阵 0 0 1 0 1 0 0 0
根据: P ( t ) [ t 3 t 2
a3 a2 t 1] a1 a0
拟合型
对已经存在的离散点列构造出尽可能光滑 的曲线,用以直观(而忠实)地反映出实 验特性、变化规律和趋势等。
设计型
设计人员对其所设计的曲线并无定量的
概念,而是在设计过程中即兴发挥。
6.1.1 曲线的表示
曲线的表示方法
参数表示
非参数表示 显示表示 隐式表示
6.1.1 曲线的表示
显示表示
,t∈[0,1]
6.1.1 曲线的表示
参数表示法的优越性:
1)用参数表示的曲线形状本质与坐标系的选取无关,具有几 何不变性。 2)有更大自由度来控制曲线、曲面的形状。 3)容易实现各种线性变换运算。
4)曲线的端点、导数等计算简单,避免了无穷大斜率的问题。
5)便于曲线的分段描述;
6)易于处理多值问题 7)参数的变化约定为[0,1],自然规定了曲线是有界的。
6.1.6 三次Hermite样条曲线
例2:试求两段三次Hermite曲线达C1连续的条件。 解:两段三次Hermite曲线分别为:
Q1(t1)=a3t1 + a2t1+ a1t1+ a0
Q2(t2)=b3 t2 + b2t2+ b1t2+ b0
t1∈[0 1]
t2∈[0 1]
依据C1连续充要条件为:
6.1.6 三次Hermite样条曲线
给出端点坐标、端点坐标的切矢量,即: P(0),P(1), P’(0),P’(1)
根据条件,得出方程:
P (0 ) a 0a 0a 0a 3 2 1 0 P ( 1 ) a 1a 1a 1a 3 2 1 0 2 P'(0 ) 3 at at 3 2 2 a 1 a 1 P'( 1 ) 3 a a 3 2 2 a 1
三次参数样条曲线方程可以写成:
P0 P1 t 1] Mh P0' P1'
P(t) [t 3 t 2
三次Hermite样 条曲线的方程
6.1.6 三次Hermite样条曲线
上式展开
其中:
称为Hermite样条调和函数
因为它们调和了边界约束值,使在整个参数范围内产生曲线的 坐标值。调和函数仅与参数t有关,而与初始条件无关。
P0 0 P1 1 P 0 ' 0 P1' 3 0 0 1 a3 a2 1 1 1 0 1 0 a1 2 1 0 a0
则:
a 3 0 a 2 1 a 1 0 a 0 3
6.1.3 逼近
控制点
逼近 构造一条曲线使之在 某种意义下最接近给 定的数据点,称对这 些数据点进行逼近, 所构造的曲线称为逼 近曲线。 用这种方法建立的曲 线数学模型只是近似 地接近已知的控制点, 并不一定完全通过所 有的控制点。
控制多边 形或 特征多边 形
6.1.4 拟合
拟合:
在曲线曲面的设计过程中,用插值或逼近的方法使生成的 曲线曲面达到某些设计要求。
6.1.6 三次Hermite样条曲线
例1:给定9个型值点,其中起始点和终止点是同一个点,从而其特 征多边形是一个首尾相接的封闭多边形,具体坐标位置如下: (100,300),(120,200),(220,200),(270,100),(370,100), (420,200),(420,300),(220,280),(100,300) 假定各点处的一阶导数数值如下: (70,-70), (70,-70), (70,-70),(70,-70), (70,70), (70,70), (-70,70),(-70,70), (70,-70) 用Hermite插值方法绘制曲线。 解:p0=(100,300) p1=(120,200) p0’=(70,-70) p1’=(70,-70) For(t=0;t<=1;t=t+0.1)或 For(t=0;t<=1;t=t+0.01)或
6.1.5 曲线的连续性—参数连续性
一阶参数连续性(记作C1) 相邻两个曲线段在交点处具有相同的一阶导数。
6.1.5 曲线的连续性—参数连续性
二阶参数连续性(记作C2) 指相邻两个曲线段在交点处具有相同的一阶 和二阶导数。
6.1.5 曲线的连续性—几何连续性
几何连续性只要求导数成比例,而不是相等。 零阶几何连续性(记作 G 0): 与零阶参数连续性相同,即相邻两个曲线段 在交点处有相同的坐标。
6.1.6 三次Hermite样条
=> 两段三次Hermite曲线:
Q1(t1)=a3t1 + a2t1+ a1t1+ a0 Q2(t2)=b3 t2 + b2t2+ b1t2+ b0 a3 + a2 + a1 + a0 = b0 t1∈[0 1] t2∈[0 1]
6.1.6 三次Hermite样条曲线
P (0 ) a 0a 0a 0a 3 2 1 0 P ( 1 ) a 1a 1a 1a 3 2 1 0 2 P'(0 ) 3 at at 3 2 2 a 1 a 1 P'( 1 ) 3 a a 3 2 2 a 1
矩阵形式:
它地方自然过渡,然后沿样条画下曲线,即得到样条
曲线(Spline Curve)。
在计算机图形学中,样条曲线是指由多项式曲线段 (可为规则/自由曲线段)连接而成的曲线,在每段 的边界处满足特定的连续性条件。
样条的插值
通常:进行分段插值 n+1个控制点进行分段,建立简单的数学模型; 在线段交点处,设置边界条件进行光滑连接。
曲线构造方法
插Байду номын сангаас法 逼近法
6.1.2 插值
• 型值点 通过测量或计算得到的曲线上少量描述曲线几何形状的数 据点。
• 控制点 用来控制或调整曲线形状的特殊点(不一定在曲线上) • 插值点
在型值点或控制点之间插入的一系列点。
6.1.2 插值
插值
给定一组有序的数 据点Pi,i=0, 1, …, n,构造一条曲线 顺序通过这些数据 点,称为对这些数 据点进行插值,所 构造的曲线称为插 值曲线。
6.1.5 曲线的连续性—几何连续性
一阶几何连续性(记作 G 1) 指相邻两个曲线段在交点处的一阶导数成比 例,但大小不一定相等。
6.1.5 曲线的连续性 –几何连续性
二阶几何连续性(记作 G 2) 指相邻两个曲线段在交点处的一阶和二阶导 数成比例,即曲率一致。
样条曲线
在汽车制造厂里,传统上采用样条绘制曲线的形状。 绘图员弯曲样条(如弹性细木条)通过各实测点,其
0 1 0 2
0 1 1 1
1 1 0 0
1
0 P 2 P 1 3 P 0 ' 0 P 1 ' 1
2 3 0 0
1 2 1 0
1P 0 P 1 1 0 P 0 ' 0 P 1 '
构造通过5个型值点的抛物线参数样条曲线
P2
P4
P1
P3
P5
这样构造出来的抛物线参数样条曲线完全通过给定的5型 值点,除了P1到P2的区间, P4到P5的区间其他两个型值 点之间都是重合区间
6.1.6 三次Hermite样条曲线
一般的三次参数样条曲线的代数形式
把上述的代数方程改写为矢量形式 从a3x到a0z有12个系数为代数系数,它们确定了 这条参数曲线的形状和位置。系数不同则曲线不 同。 P(t)表示曲线上任一点的位置矢量;系数a0表示 (a0x,a0y,a0z)
6.1.6 三次Hermite样条曲线
Hermite 样条曲线通过给定的N个型值点构造,每 两个型值点之间生成一条Hermite曲线段, Hermite 样条曲线由N-1条首尾相连的Hermite曲线 构成,并且相邻的Hermite曲线段在连接点处二阶 导数相等(C2连续性) Hermite曲线段定义:给定曲线段的两个端点Pi 、 Pi+1和两端点处的一阶导数Ri和Ri+1构造而成。
6.1 基础知识
从表示形式来看,曲线可分成两大类: 可以用标准方程描述的曲线。如圆、 规则曲线—— 椭圆、抛物线、双曲线、渐开线、 摆线等 曲线 无法用标准方程描述的曲线,通常 自由曲线—— 由一系列实测数据点确定。如汽车 的外形曲线、等高线等。
6.1 基础知识
从生成算法来看,曲线可分成两大类: