飞思卡尔单片机 DG128 Timer寄存器说明
手把手教你写xs128程序22

>
手把手教你写S12XS128程序(22)--Timer寄存器说明4
时间:2010-01-09 23:35来源:电子设计吧作者:dzsj8 点击:274次
6、IC/OC 选择寄存器(TIOS)
IC 还是OC 方式。
当某位IOSn=0 时,对应的通道n 为输入捕捉(1C)通道,否则当IOSn=1 时,通道n 为输出比较(OC)通道。
其中的各位可以在任何时候写入或读出。
【说明】上电后该寄存器默认为$00,TSCR 中的TEN 默认也为0,这时所有通道处于通用I/O 方式,将TEN 置位后各个通道进入IC 方式,要将某些通道设置成OC 方式,必须对TIOS 进行设置,即将有关位置1。
设置成OC 的通道其引脚具有降功率驱动功能,设置成IC 的通道具有内部上拉功能,但上电后均处于关闭状态,可以根据需要启用。
7、IC/OC 寄存器(TC0-TC7)
每个IC 或OC 通道都设置有一个16 位的寄存器,对于IC(输入捕捉)通道,当通道的边沿探测器检测到由EDGnA、EDGnB 指定的条件时,将自由定时器的值捕捉到寄存器TCn,随后程序可以读取和处理;对于OC(输出比较)通道,程序将预定的时刻写入到TCn,当自由定时器的值与其相等时,触发由OMn、OLn 所指定的输出动作。
定时器模块共有TC7-TC0 等8 个16 位IC/OC 寄存器。
TC0
TC1
TC2
TC3
TC4
TC5
TC6
TC7。
飞思卡尔单片机快速上手指南说明书
Freescale Semiconductor, Inc.Document Number: 用户指南 Rev. 0, 09/2014Confidentiality statement, as appropriate to document/part status.___________________________________________________________________飞思卡尔单片机快速上手指南作者:飞思卡尔半导体IMM FAE 团队飞思卡尔半导体是全球领先的单片机供应商,其单片机产品包含多种内核,有数百个系列。
为支持用户使用这些产品,飞思卡尔提供了丰富的网站资源、文档及软硬件工具,另外,我们还有众多的第三方合作伙伴及公共平台的支持。
对于不熟悉飞思卡尔产品和网站的初学者来说,了解和使用这些资源这无疑是一个令人望而生畏的浩瀚工程。
本指南的目的,就是给初学者提供一个指导,让他们不被这些海量信息淹没;用户根据本指导提供的操作步骤,能迅速找到所需的资源,了解如何使用相关的工具。
在本指南中,我们以飞思卡尔的新一代Kinetis 单片机K22系列为例,介绍了如何获取与之相关的资源,如何对其进行软硬件设计和开发。
实际上,这些方法也适用于其它的单片机系列。
当然,对于其它有较多不同之处的产品,我们也会继续推出相应的文档,供广大用户参考。
目录1 如何获取技术资料与支持 ..........................................................2 2 如何选择产品、申请样片及购买少量芯片和开发工具 ........... 93 飞思卡尔单片机的开发环境、开发工具和生态系统 ............. 224 如何阅读飞思卡尔的技术文档 ................................................ 45 5 飞思卡尔单片机硬件设计指南 ................................................ 55 6飞思卡尔单片机软件开发指南 (67)飞思卡尔单片机快速上手指南, Rev. 1, 09/20142Freescale Semiconductor, Inc.1 如何获取技术资料与支持1.1 概述当用户使用飞思卡尔单片机芯片时,如何获取芯片的数据手册(Datasheet )、参考设计(Reference Manual )和官方例程等资源呢?另外当用户遇到了技术问题该如何获得帮助和解答呢?这里以Kinetis 的K22系列芯片为例为大家介绍如何解决这些问题。
飞思卡尔16位单片机寄存器总结

一、输入输出端口寄存器I/O接口包括PORTA、B、E、K、T、S、M、P、H、J、AD。
其中PORTA、B、E、K属于复用扩展总线接口,单片机在扩展方式下工作时,作为总线信号。
1、PORTT、S、M、P、H、JI/O寄存器PTx如果对应位数据方向寄存器DDRx为“0”,输入,读取该寄存器返回引脚值;“1”,输出,读取该寄存器返回I/O寄存器的内容。
数据方向寄存器DDRx决定对应引脚为输出还是输入,“0”为输入,“1”为输出,复位后,默认为输入。
上拉/下拉使能寄存器PERx选择使用内置上拉/下拉器件,“1”允许,“0”禁用。
中断使能寄存器PIExPORTP、H、J三个端口具有中断功能。
“1”对应引脚允许中断,“0”禁止,复位后,所有端口中断关闭。
中断标志寄存器PIFxPORTP、H、J三个端口具有中断功能。
“1”对应引脚允许中断,“0”禁止,复位后,所有端口中断关闭。
2、PORTA、B、E、KI/O寄存器Px若某端口的引脚被定义为输出,写入I/O寄存器中的数值会从对应引脚输出;输入,通过I/O寄存器读取对应引脚电平。
数据方向寄存器DDRx决定对应引脚为输出还是输入,“0”为输入,“1”为输出,复位后,默认为输入。
PORTE最低两位只能为输入。
上拉电阻控制寄存器PERx第7、4、1、0位分别控制K、E、B、A端口,“1”允许使用对应端口的上拉电阻,“0”禁止,复位后,PK、PE端口使能,PB、PA禁止。
二、中断系统中断控制寄存器INTCR第7位IRQE,中断电平/边沿有效选择,0为低电平有效,1为下降沿有效;第6位IRQEN,外部中断IRQ中断请求使能,0关闭,1允许。
三、PWM模块PWM允许寄存器PWME对应每一位PWMEx,1启动输出,0停止输出,读写任意时刻。
PWM预分频时钟选择寄存器PWMPRCLK为Clock A和B选择独立的预分频因子,读写任意时刻。
Clock B对应6、5、4三位,Clock A对应2、1、0三位,分别可以实现2、4、8、16、32、64、128分频。
飞思卡尔智能车dg128单片机控制程序代码

void AD_Init(void)
{
ATD0CTL2=0xC0; //AD模块上电, 快速清零, 无等待模式, 禁止外部触发, 中断禁止
ATD0CTL3=0x44; //每次转换8个序列, FIFO, Freeze模式下继续转
ATD0CTL4=0x02; //10位精度, 采样时间为2个AD时钟周期,ATDClock=4MHz
//设置舵机
PWMCTL_CON01=1; //使得通道0,1成为16位pwm
PWMPER0 =0x75;
PWMPER1 =0x30; //舵机的频率是: 24M/8/30000=100Hz,T=10ms
PWMDTY01=4500; // 对应为4500/30000的占空比,待调整
Infrared_detect();
data_handle();
motor_ctl();
steer_ctl();
}
}
void interrupt 26 MDC_ISR(void)
{
static unsigned int number_count=0; static unsigned int start=0; static
go=2;
if(begin>=150)
go=3;
}
}
}
//-----系统初始化-----------------------
void system_init(void) //system initiat
void speed_ctl(void); //速度控制
void motor_ctl(void); //电机控制
void PACBInit(void);
飞思卡尔16位单片机的资源配置

以MC9S12XS128MAL为例,其实DG128之类的类似。
如图一,128代表的是单片机中的FLASH大小为128K Byte,同理64代表的是单片机中的FLASH大小为64 K Byte,256代表的是单片机中的FLASH大小为256 K Byte。
但是S12(X)所使用的内核CPU12(X)的地址总线为16位,寻址范围最大为2^16 =64K Byte,而这64K Byte的寻址空间还包括寄存器、EEPROM (利用Data Flash模拟)、RAM等,因此不是所有的64K Byte都是用来寻址FLASH。
所以在S12(X)系列单片机中,很多资源是以分页的形式出现的,其中包括EEPROM、RAM、FLASH。
EEPROM的每页大小为1K Byte,RAM的每页大小为4K Byte,FLASH的每页大小为16K Byte。
因此XS128中EEPROM的页数为8K/1K = 8页,RAM的页数为8K/4K = 2页,Flash的页数为128K/16K = 8页。
图一图二在单片普通模式中,复位后,所有内存资源的映射如图二所示,其中从0x0000-0x07FF 的2K范围内映射为寄存器区,如I/O端口寄存器等,当然寄存器没有那么多,后面的一部分其实没有使用;从0x0800-0x0BFF,共1K的空间,映射为EEPROM区,由上面的分析,XS128中共有8页的共8K的EEPROM,所以这8页的EEPROM都是以分页的形式出现的,可以通过设置寄存器EPAGE选择不同的页并进行访问;从0x0C00到0x0FFF的1K空间为保留区(其实这里面也有学问,以后探讨);从0x1000到0x3FFF的12K空间为RAM区,分为三页,但是和前面所说的EEPROM不同,这三页中有2页(对于XS128和XS256)或一页(对于XS64)为固定页,位于12K空间的后一部分,以XS128为例,其内部的RAM资源为8K,所以其三页中的最后两页(0x2000-0x3FFF)为固定页,第一页(0x1000-0x1FFF)为窗口区,通过设置寄存器RPAGE来映射其他分页的RAM,当然在单片普通模式下,XS128内部已经没有其他的RAM了,所以这一页其实也没有用。
Timer寄存器说明
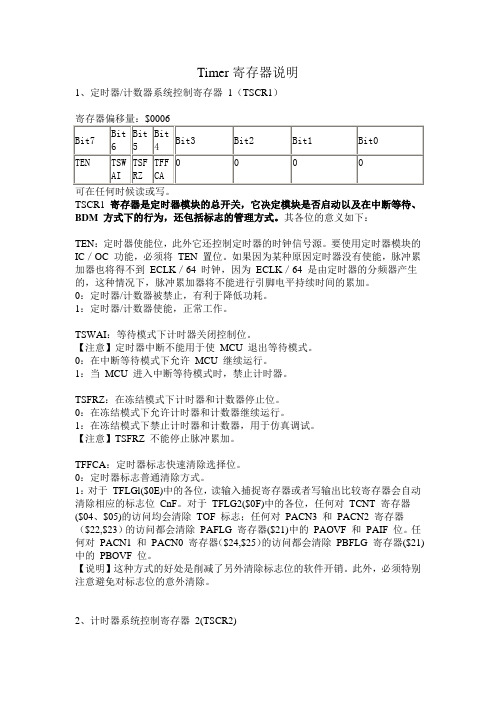
Timer寄存器说明1、定时器/计数器系统控制寄存器1(TSCR1)TSCR1 寄存器是定时器模块的总开关,它决定模块是否启动以及在中断等待、BDM 方式下的行为,还包括标志的管理方式。
其各位的意义如下:TEN:定时器使能位,此外它还控制定时器的时钟信号源。
要使用定时器模块的IC/OC 功能,必须将TEN 置位。
如果因为某种原因定时器没有使能,脉冲累加器也将得不到ECLK/64 时钟,因为ECLK/64 是由定时器的分频器产生的,这种情况下,脉冲累加器将不能进行引脚电平持续时间的累加。
0:定时器/计数器被禁止,有利于降低功耗。
1:定时器/计数器使能,正常工作。
TSWAI:等待模式下计时器关闭控制位。
【注意】定时器中断不能用于使MCU 退出等待模式。
0:在中断等待模式下允许MCU 继续运行。
1:当MCU 进入中断等待模式时,禁止计时器。
TSFRZ:在冻结模式下计时器和计数器停止位。
0:在冻结模式下允许计时器和计数器继续运行。
1:在冻结模式下禁止计时器和计数器,用于仿真调试。
【注意】TSFRZ 不能停止脉冲累加。
TFFCA:定时器标志快速清除选择位。
0:定时器标志普通清除方式。
1:对于TFLGl($0E)中的各位,读输入捕捉寄存器或者写输出比较寄存器会自动清除相应的标志位CnF。
对于TFLG2($0F)中的各位,任何对TCNT 寄存器($04、$05)的访问均会清除TOF 标志;任何对PACN3 和PACN2 寄存器($22,$23)的访问都会清除PAFLG 寄存器($21)中的PAOVF 和PAIF 位。
任何对PACN1 和PACN0 寄存器($24,$25)的访问都会清除PBFLG 寄存器($21)中的PBOVF 位。
【说明】这种方式的好处是削减了另外清除标志位的软件开销。
此外,必须特别注意避免对标志位的意外清除。
2、计时器系统控制寄存器2(TSCR2)寄存器偏移量:$000DTOI:定时器/计时器溢出中断使能。
HCS12微控制器MC9S12DG128系统使用说明

MC9S12DG128实验使用手册目录第一章概述 (2)第二章硬件电路原理 (4)2.1子板硬件原理 (4)2.1.1、MCU引脚接口部分 (5)2.1.2、串口通信部分 (6)2.1.3、电源部分 (6)2.1.4、复位电路部分 (6)2.1.5、I/O端口电路部分 (7)2.1.6、晶振电路与BDM插头部分 (7)2.2母板硬件原理 (8)2.2.1、电源部分 (9)2.2.2、MC9S12DG128开发板与各接口部分 (9)2.2.3、串口通信部分 (11)2.2.4、LED数码管显示部分 (12)2.2.5、8位数字量输入输出部分 (13)2.2.6、红外发射接收部分 (15)2.2.7、LCD显示部分 (15)2.2.8、模拟量输入部分 (15)2.2.9、蜂鸣器和喇叭部分 (15)2.2.10、键盘输入部分 (16)2.2.11、继电器部分 (16)2.2.12、打印机部分 (17)2.2.13、CAN总线部分 (17)第三章MC9S12DG128教学平台快速入门 (18)3.1硬件连接 (18)3.2软件应用 (20)第一章概述天津工业大学Freescale MCU/DSP研发中心开发的DG128实验系统,其功能基本上和美国MCUSLK系统相同,而且根据中国的教学情况重新设计了一些功能、力求达到更好的实验效果。
DG128实验系统由主板和独立的MCU子板构成。
DG128实验系统的主板插槽和美国的MCUSLK系统相互兼容,主板的插槽可以插包括S12、S08、 HC08各系列MCU子板。
MCU子板可以单独调试运行,也可以插在主板上调试,充分利用主板丰富的硬件资源。
MC9S12DG128具有16位中央处理器(HCS12 CPU)、128KB Flash EEPROM、8KB RAM、2KB EEPROM,以及定时器通道、键盘中断和A/D通道等接口。
MC9S12DG128实验系统可以直接与CodeWarrior相连,具有下载程序、在线单步运行、断点调试、连续运行、修改寄存器和存储单元等特点,可以很方便的进行教学。
飞思卡尔单片机_DG128_Timer寄存器说明

Bit15 Bit14 Bit13 Bit12 Bit7 Bit6 Bit5 Bit4
TC5 寄存器偏移量:$001A-$001B Bit15 Bit14 Bit13 Bit12 Bit7 Bit6 Bit5 Bit4
TC6 寄存器偏移量:$001C-$001D Bit15 Bit14 Bit13 Bit12 Bit7 Bit6 Bit5 Bit4
TC7 寄存器偏移量:$001E-$001F Bit15 Bit14 Bit13 Bit12 Bit7 Bit6 Bit5 Bit4
Bit11 Bit3
Bit11 Bit3
Bit8 Bit0
Bit8 Bit0
Bit8 Bit0
Bit8 Bit0
Bit8 Bit0
Bit8 Bit0
8、定时器核心寄存器(TCNT) 寄存器偏移量:$0004-$0005
Bit15 Bit14 Bit13 Bit12 Bit11 Bit10 Bit9 Bit8
Bit7 Bit6
Bit5
Bit4
所示的 TFLG1、TFLG2 为中断标志寄存器,其中 TFLG1 对应 8 个 IC/OC 通道,当某 CnF=1 时说明对应的 IC/OC 通道有动作,表明该通道有中断事 件发生。TFLG2 只有一个标志位 TOF,作为核心计数器的中断请求标志。当 TOF=1 时说明核心计数器溢出。要清除某个标志位,只需向该位写 1,向某位 写 0 不影响该位的状态。当 TSCR 中的 TFFCA 位置位时,读 IC 通道或写 OC 通道 ($10-$1F)将自动清除该通道标志 CnF,对 TCNT 的任何访问将自动清 除 TFLG2。
飞思卡尔2014mc9s12xs128学习及智能车制作笔记
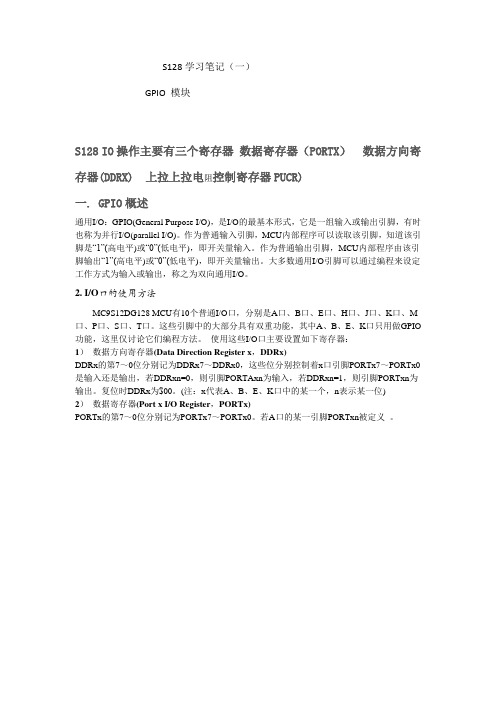
S128学习笔记(一)GPIO 模块S128 IO操作主要有三个寄存器数据寄存器(PORTX)数据方向寄存器(DDRX) 上拉上拉电阻控制寄存器PUCR)一. GPIO概述通用I/O:GPIO(General Purpose I/O),是I/O的最基本形式,它是一组输入或输出引脚,有时也称为并行I/O(parallel I/O)。
作为普通输入引脚,MCU内部程序可以读取该引脚,知道该引脚是“1”(高电平)或“0”(低电平),即开关量输入。
作为普通输出引脚,MCU内部程序由该引脚输出“1”(高电平)或“0”(低电平),即开关量输出。
大多数通用I/O引脚可以通过编程来设定工作方式为输入或输出,称之为双向通用I/O。
2. I/O口的使用方法MC9S12DG128 MCU有10个普通I/O口,分别是A口、B口、E口、H口、J口、K口、M 口、P口、S口、T口。
这些引脚中的大部分具有双重功能,其中A、B、E、K口只用做GPIO 功能,这里仅讨论它们编程方法。
使用这些I/O口主要设置如下寄存器:1)数据方向寄存器(Data Direction Register x,DDRx)DDRx的第7~0位分别记为DDRx7~DDRx0,这些位分别控制着x口引脚PORTx7~PORTx0是输入还是输出,若DDRxn=0,则引脚PORTAxn为输入,若DDRxn=1,则引脚PORTxn为输出。
复位时DDRx为$00。
(注:x代表A、B、E、K口中的某一个,n表示某一位)2)数据寄存器(Port x I/O Register,PORTx)PORTx的第7~0位分别记为PORTx7~PORTx0。
若A口的某一引脚PORTxn被定义。
成输出,程序使x口I/O寄存器PORTx的相应位PORTxn=0,则引脚PORTxn输出“低电平”;程序使PORTxn=1,则引脚PORTxn输出“高电平”。
若x口的某一引脚PORTxn被定义成输入,程序通过读取x口I/O寄存器PORTx,获得输入情况,0表示输入为“低电平”,1表示输入为“高电平”。
xs128单片机的简单定时中断
基于飞思卡尔xs128单片机的简单定时中断(PIT)2009-10-08 21:47:40刚开始接触这款单片机,由于看的书基本上都是以dg128为原型来讲解的,故很多东西都是按照dg128的情况来移植到xs128上的,导致出了很多错误。
像定时器模块这部分,查了很多资料,最后发现xs128没有dg128所具有的MDC模数计数器模块,相对应的是定时模块PIT,然后在网上疯狂的找了很多资料,总结下来,自己花了一晚上弄了个最最简单的定时中断程序,实现1秒钟LED灯的闪烁。
PIT说明:S12PIT24B4CV1是一个模数递减计数器。
首先给计数寄存器设定一个初值,每经过一个总线周期,计数器进行一次减一操作,当计数器自减溢出时,触发中断。
因为总线周期是已知的,即可以通过计数器自减实现定时。
在XS128PIT模块中,需要用到得是如下几个寄存器。
1)、PIT Contorl and force Lad Micro Timer Register(PITCFLMT)该寄存器用于PIT模块的使能设置和工作方式设置。
通常设置该寄存器中的PITE为即可,即PITCFLMT_PITE=1,使PIT使能。
2)、PIT Channel Enable Register(PITCE)该寄存器用于对PIT模块中的4个通道使能进行设置。
如果使用某个通道时,对对应位进行置一即可,即PITCE_PCEx=1,其中x代表通道序号,为0~3。
3)、PIT Micro Timer Load Register 0 to 1 (PITMTLD0-1)该寄存器用于设置PIT模块中的8位计数器初值,以实现24位的计数。
设定值为0到255范围。
4)、PIT Load Register 0 to 3(PITLD0-3)该寄存器用于设置PIT模块中的16位计数器初值,和8位计数器配合而成24位计数器。
设定值范围0-65535。
5)、PIT Multiplex Register(PITMUX)该寄存器对定时器通道的8位时基进行选择。
飞思卡尔单片机 DG128 SCI寄存器说明

SCI寄存器说明1、波特率控制寄存器(SCIBDH、SCIBDL)IREN:红外调制模式使能位1 使能0 禁止TNP[0..1]:窄脉冲发射位SBR[0..12]:波特率设置位When IREN = 0 then,SCI baud rate = SCI bus clock / (16 x SBR[12:0])When IREN = 1 then,SCI baud rate = SCI bus clock / (32 x SBR[12:1])【说明】波特率发生器在复位后是禁止的,在设置TE、RE(在SCICR2寄存器中)后才会工作。
当(SBR[12:0] = 0 and IREN = 0) 或者(SBR[12:1] = 0 andIREN = 1),波特率发生器不工作。
【注意】在未写入SCIBDL,写SCIBDH没有反应。
一般地,设置IREN=0,SR=52(总线频率8MHz),波特率为9600。
2、数据寄存器(SCIDRH、SCIDRL)SCI 内部分别设有发送和接收两个数据寄存器,其低位都通过SCIDRL 访问,读操作返回接收数据寄存器RDR 的内容,写操作数据置入发送数据寄存器。
TDR。
当M=1 即运行在9 位数据模式时,SCIDRL 和SCIDRH 形成9 位的SCI数据字,这时必须先写入SCIDRH,以便与低位字节(SCIDRL)一起进入发送移位器。
如果M=0 即SCI 只用于7 位或8 位的数据传送,可以只访问SCIDRL。
当PE=1 即奇偶校验允许时,奇偶校验位由硬件负责,无需软件干预。
R8:接收到的位8,该位写操作无效。
当SCI 设置成9 位数据运行模式时,该位是从串行数据流中接收到的第9 位。
T8:发送位8,任何时候可写。
当SCI 设置成9 位数据模式时,该位是送到串行数据流的第9 位。
该位不必为每个数据重新设置,每次发送可重复使用。
R[0..7]T[0..7]:收/发数据位7-0,读操作返回只读寄存器RDR 的内容,写操作写入只写寄存器TDR。
飞思卡尔单片机寄存器及汇编指令详解
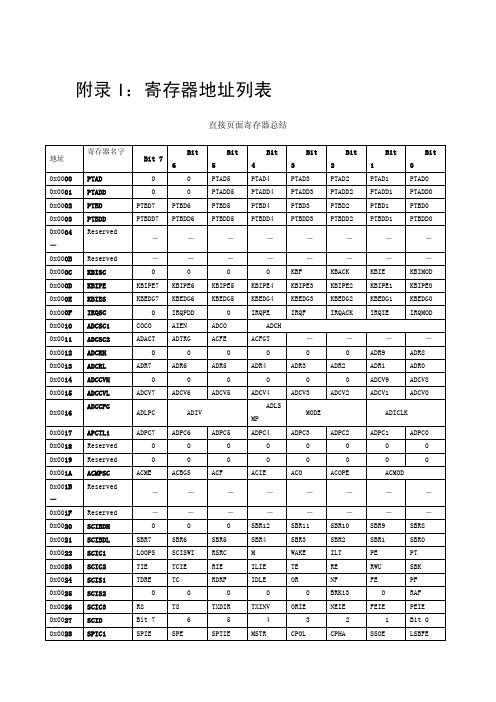
附录I:寄存器地址列表直接页面寄存器总结高页面寄存器总结非易失寄存器总结注:直接页面寄存器表地址的低字节用粗体显示,直接寻址对其访问时,仅写地址低字节即可。
第2列中寄存器名用粗体显示以区别右边的位名。
有0的单元格表示未用到的位总是读为0,有破折号的单元格表示未用或者保留,对其读不定。
附录II 指令接与寻址方式HCS08指令集概括运算符() = 括号种表示寄存器或存储器位置的内容← = 用……加载(读: “得到”)& = 布尔与| = 布尔或⊕= 布尔异或×= 乘÷ = 除: = 串联+ = 加- = 求反(二进制补码)CPU registersA =>累加器CCR =>条件代码寄存器H =>索引寄存器,高8位X => 索引寄存器,低8位PC =>程序计数器PCH =>程序计数器,高8位PCL =>程序计数器,低8位SP =>堆栈指针存储器和寻址M =>一个存储区位置或者绝对值数据,视寻址模式而定M:M + 0x0001 => 两个连续存储位置的16位值.高8位位于M的地址,低8位位于更高的连续地址.条件代码寄存器(CCR)位V => 二进制补码溢出指示,第7位H => 半进位,第4位I => 中断屏蔽,第 3位N => 求反指示器, 第2位Z => 置零指示器, 第1位C => 进/借, 第0位 (进位第 7位 )CCR工作性符号– => 位不受影响0 = > 位强制为01 = > 位强制为1= >根据运算结果设置或清除位U = > 运算后没有定义机器编码符号dd =>一个直接寻址0x0000–0x00FF的低8位(高字节假设为0x00)ee => 16位偏移量的高8位ff => 16位偏移量的低8位ii => 立即数的一个字节jj => 16位立即数值的高位字节kk => 16位立即数值的低位字节hh => 16位扩展寻址的高位字节ll => 16位扩展寻址的低位字节rr => 相对偏移量n —任何表达范围在0–7之间的一个有符号数的标号或表达式opr8i —任何一个表达8位立即值的标号或表达式opr16 —任何一个表达16位立即值的标号或表达式opr8a —任何一个表达一个8位值的标号或表达式.指令对待这个8位值为直接页面64K 字节地址空间(0x00xx)中地址的低8位.opr16a —任何一个表达16位值的标号或表达式.指令对待这个值为直接页面64K字节地址空间.oprx8 —任何一个表达8位无符号值的标号或表达式,用于索引寻址.oprx16 —任何一个16位值的标号或表达式.因为HCS08有一个16位地址总线,这可以为一个有符号或者无符号值.rel —任何指引在当前指令目标代码最后一个字节之后–128 to +127个字节之内的标号或表达式.汇编器会计算包括当前指令目标代码在内的8位有符号偏移量. 寻址方式隐含寻址(Inherent)如CLRA,只有操作码,无操作数,需要操作的数据一般为CPU寄存器,因此不需要再去找操作数了。
飞思卡尔MC9S12XS128单片机各模块使用方法及寄存器配置

飞思卡尔MC9S12XS128单片机各模块使用方法及寄存器配置手把手教你写S12XS128程序--PWM模块介绍该教程以MC9S12XS128单片机为核心进行讲解,全面阐释该16位单片机资源。
本文为第一讲,开始介绍该MCU的PWM模块。
PWM 调制波有8个输出通道,每一个输出通道都可以独立的进行输出。
每一个输出通道都有一个精确的计数器(计算脉冲的个数),一个周期控制寄存器和两个可供选择的时钟源。
每一个P WM 输出通道都能调制出占空比从0—100% 变化的波形。
PWM 的主要特点有:1、它有8个独立的输出通道,并且通过编程可控制其输出波形的周期。
2、每一个输出通道都有一个精确的计数器。
3、每一个通道的P WM 输出使能都可以由编程来控制。
4、PWM 输出波形的翻转控制可以通过编程来实现。
5、周期和脉宽可以被双缓冲。
当通道关闭或PWM 计数器为0时,改变周期和脉宽才起作用。
6、8 字节或16 字节的通道协议。
7、有4个时钟源可供选择(A、SA、B、SB),他们提供了一个宽范围的时钟频率。
8、通过编程可以实现希望的时钟周期。
9、具有遇到紧急情况关闭程序的功能。
10、每一个通道都可以通过编程实现左对齐输出还是居中对齐输出。
1、PWM启动寄存器PWMEPWME 寄存器每一位如图1所示:复位默认值:0000 0000B图1 PWME 寄存器每一个PWM 的输出通道都有一个使能位P WMEx 。
它相当于一个开关,用来启动和关闭相应通道的PWM 波形输出。
当任意的P WMEx 位置1,则相关的P WM 输出通道就立刻可用。
用法:PWME7=1 --- 通道7 可对外输出波形PWME7=0 --- 通道7 不能对外输出波形注意:在通道使能后所输出的第一个波形可能是不规则的。
当输出通道工作在串联模式时(PWMCTL 寄存器中的CONxx置1),那么)使能相应的16位PWM 输出通道是由PWMEx 的高位控制的,例如:设置PWMCTL_CON01 = 1,通道0、1级联,形成一个16位PWM 通道,由通道 1 的使能位控制PWM 的输出。
【精品】飞思卡尔寄存器整理

S12的输入/输入端口(I/O口)I/O端口功能可设置为通用I/O口、驱动、内部上拉/下拉、中断输入等功能。
设置I/O口工作方式的寄存器有:DDR、IO、RDR、PE、IE和PS.DDR:设定I/O口的数据方向.IO :设定输出电平的高低。
RDR:选择I/O口的驱动能力.PE:选择上拉/下拉.IE:允许或禁止端口中断。
PS:1、中断允许位置位时,选择上升沿/下降沿触发中断;2、中断禁止时且PE有效时,用于选择上拉还是下拉。
I/O端口设置1、A口、B口、E口寄存器(1)数据方向寄存器DDRA、DDRB、DDREDDRA、DDRB、DDRE均为8位寄存器,复位后其值均为0。
当DDRA=0、DDRB=0、DDRE=0时A口、B口和E口均为输入口. 否则,A口、B口、E口为输出口.当DDRA、DDRB、DDRE的任何一位置1时,则该位对应的引脚被设置为输出。
例如,将A口设置为输出口,则其C语言程序的语句为:DDRA=0xff;A口、B口、E口上拉控制寄存器PUCRPUCR为8位寄存器,复位后的值为0.当PUPAE、PUPBE、PUPEE被设置为1时,A口、B口、E口具有内部上拉功能;为0时,上拉无效.当A口、B口、E 口为地址/数据总线时,PUPAE和PUPBE无效.A口、B口、E口降功率驱动控制寄存器RDRIVRDRIV为8位寄存器,复位后的值为0,此时,A口、B口、E口驱动保持全功率;当RDPA、RDPB、RDPE为1时,A口、B口、E口输出引脚的驱动功率下降(4)数据寄存器PORTA、PORTB、PORTEPORTA、PORTB、PORTE均为8位寄存器,复位后的值为0,端口引脚输出低电平;要使引脚输出高电平,相应端口对应位应该置1。
由于PE0是/XIRQ、PE1是IRQ,因此,PE0和PE1只能设置为输入。
2、H口寄存器(1)H口I/O寄存器PTH任意时间读/写。
当某一引脚对就的数据方向位设置为1时,读操作返回的是这个端口寄存器的值;否则,读的是引脚的值。
飞思卡尔单片机外设模块寄存器翻译
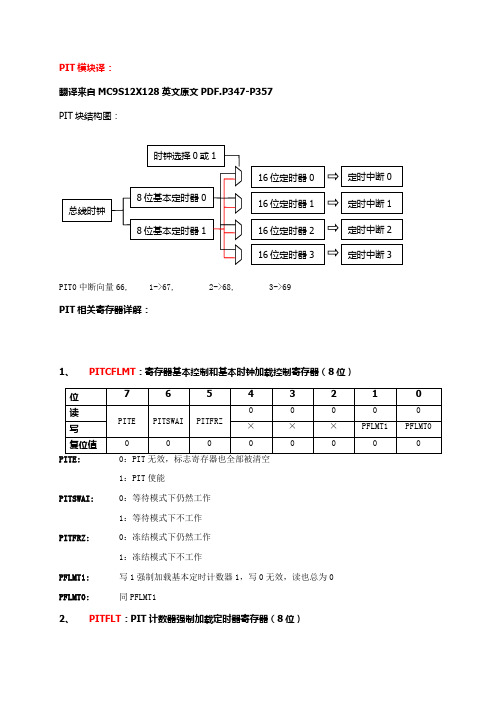
PIT 模块译:翻译来自MC9S12X128英文原文PDF.P347-P357 PIT 块结构图:PIT0中断向量66,1->67,2->68,3->69PIT 相关寄存器详解: 1、 PITCFLMT :寄存器基本控制和基本时钟加载控制寄存器(8位)1:PIT 使能PITSWAI: 0:等待模式下仍然工作1:等待模式下不工作 PITFRZ: 0:冻结模式下仍然工作1:冻结模式下不工作PFLMT1: 写1强制加载基本定时计数器1,写0无效,读也总为0 PFLMT0:同PFLMT12、 PITFLT :PIT 计数器强制加载定时器寄存器(8位)PFLT[3:0]写1相对应的16位计数寄存器会立即载入相对应的16位计数加载寄存器(PITLDn)中的值。
3、PITCE:PIT通道使能存器(8位)PCE[3:0]:如果PITE已经使能,对寄存器PCEn写1后,每输入一个时钟相对应的计数寄存器开始递减,写0无效。
4、PITMUX:PIT基本时钟通道选择寄存器(8位)PMUX[3:0]:对PMUXn写1,则对应定时器通道选择基本时钟1作为输入,写0则选择基本时钟0为输入。
5、PITINTE:PIT定时中断使能寄存器(8位)PINTE[3:0]:对PINTEn写1,当相对应的计数寄存器和基本计数寄存器归0时,产生中断请求,否则无效。
6、PITTF:PIT时钟输出标志寄存器(8位)7、PITMTLD0-1:PIT基本时钟计数器预加载寄存器(8位)会被加载到基本定时器n,无论什么时刻PFLMTn置“1”会立即更新基本定时器寄存器的值.8、PITLD0–3:PIT0-3计数器预加载寄存器(16位)PITLD0-3的值用来加载到相对应计数器0-3的寄存器中。
当相应通道计数器归零时,或PITFLT寄存器中相应的强制加载位置“1”时,PITLDn中的值将会被立即加载到PITCNTn。
9、PITCNT0–3:PIT0-3计数寄存器(16位)变计数周期。
freescale 单片机MC9S12G128应用程序(PWM,Timer,ADC……)

PWM应用程序/*程序实现功能:PP1口输出PWM方波程序说明:通过改变duty和period ,从而控制PWM周期和占空比duty cycle=duty/periodPWM frequency=1M/(2*period)(Fbus=24M,scla=24)*/#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions */void SetBusClock_24MHZ(void);void PWMDisable(byte channel);void PWMEnable(byte channel);void PWMSinglePortSetting(byte channel ,byte period ,byte duty) ;void PWMsinglePortInitial(byte channel, byte clkab,byte clock, byte polarity,byte align) ; void Service_WD(void);void PWMGeneralInitial(byte prclk,byte scla,byte sclb,byte ctl);void PWMConcatenateSetting(byte channel,word period,word duty);void main(void){/* put your own code here *///总线时钟频率设置:24MSetBusClock_24MHZ();//对预分频时钟,分频时钟A,分频时钟B和控制寄存器的配置//0分频01级联PWMGeneralInitial(0,24,0,0x10);//PWM端口寄存器的配置// 1通道SA时钟起始高电平左对齐PWMsinglePortInitial(1,0,1,1,0);//PWM级联输出配置//50HZ 占空比12.5%PWMConcatenateSetting(1,10000,250);//EnableInterrupts;for(;;) {_FEED_COP(); /* feeds the dog */} /* loop forever *//* please make sure that you never leave main */}//*********************************************//函数名:PWMEnable//函数功能:PWM单个端口使能//函数参数:一个byte 类型channel 代表PWM通道号// 返回值:无//********************************************void PWMEnable(byte channel){if(channel>7) channel=7;PWME|=(1<<channel); //选择使能位}//**********************************************//函数名称:PWMDisable//函数功能:PWM单个端口禁止//函数参数:一个byte类型channel 代表PWM通道号//返回值:无//***********************************************void PWMDisable(byte channel){if(channel>7) channel=7;PWME&=~(1<<channel); //选择禁止位}//函数功能:启动看门狗void Service_WD(void){CPMUARMCOP=0x55;CPMUARMCOP=0xAA;}//函数功能:总线时钟设置void SetBusClock_24MHZ(void){CPMUOSC_OSCE=1; //enable osc/*时钟倍频:24MHz BusClock48MHz VCO48MHz PLL*/CPMUSYNR=0x00|0x05; //VCOFRQ[1:0],SYNDIV[5:0]CPMUREFDIV=0x20|0x03;//REFFRQ[1:0],REFDIV[3:0]CPMUPOSTDIV=0x00; //POSTDIV=0;while(!CPMUFLG_LOCK)//等待VCO稳定Service_WD(); //看门狗CPMUCLKS_PLLSEL=1;}//*********************************************//函数名称:PWMSinglePortSetting//函数功能:实现PWM周期寄存器和占空比寄存器通道的单独输出//函数参数:3个byte类型//参数1:channel代表了当前配置的PWM通道//参数2:period 周期配置参数/*Left aligned output (CAEx = 0) PWMx Period = Channel Clock Period * PWMPERxCenter Aligned Output (CAEx = 1) PWMx Period = Channel Clock Period * (2 * PWMPERx)*///参数3:duty 占空比配置参数/*Polarity = 0 (PPOL x =0) Duty Cycle = [(PWMPERx-PWMDTYx)/PWMPERx] * 100%Polarity = 1 (PPOLx = 1) Duty Cycle = [PWMDTYx / PWMPERx] * 100%*///返回值:无//**********************************************void PWMSinglePortSetting(byte channel ,byte period ,byte duty){if(channel>7) channel=7;PWMDisable(channel); //禁止该通道switch(channel){case 0:PWMPER0=period; //设置周期寄存器PWMDTY0=duty; //设置占空比寄存器break;case 1:PWMPER1=period; //设置周期寄存器PWMDTY1=duty; //设置占空比寄存器case 2:PWMPER2=period; //设置周期寄存器PWMDTY2=duty; //设置占空比寄存器break;case 3:PWMPER3=period; //设置周期寄存器PWMDTY3=duty; //设置占空比寄存器break;case 4:PWMPER4=period; //设置周期寄存器PWMDTY4=duty; //设置占空比寄存器break;case 5:PWMPER5=period; //设置周期寄存器PWMDTY5=duty; //设置占空比寄存器break;case 6:PWMPER6=period; //设置周期寄存器PWMDTY6=duty; //设置占空比寄存器break;case 7:PWMPER7=period; //设置周期寄存器PWMDTY7=duty; //设置占空比寄存器break;default:break;}PWMEnable(channel);}//*********************************************//函数名:PWMSinglePortInitial//函数功能:PWM端口寄存器的配置//函数参数:5个byte类型//参数1:channel 代表了当前配置的PWM通道//参数2:clkab 参数2,3决定了时钟源的选择//参数3: clock/*PWM Channel 0,1,4,5PCLKAB[0,1,4,5] PCLK[0,1,4,5] Clock Source Selection0 0 Clock A0 1 Clock SA1 0 Clock B1 1 Clock SBPWM Channel 2,3,6,7PCLKAB[2,3,6,7] PCLK[2,3,6,7] Clock Source Selection0 0 Clock B0 1 Clock SB1 0 Clock A1 1 Clock SA*///参数4:polarity PWM极性选择// 0 开始为低电平,周期计数开始为高电平// 1 开始为高电平,周期计数开始为低电平//参数5:align PWM对齐方式选择// 0 输出左对齐// 1 输出中心对齐//返回值:无//**********************************************void PWMsinglePortInitial(byte channel, byte clkab,byte clock, byte polarity,byte align) {if(channel>7) channel=7;//禁止该通道PWMDisable(channel);// PWM 时钟A/B 选择if(clkab==0) PWMCLKAB&=~(1<<channel);else PWMCLKAB|=(1<<channel);// PWM 时钟选择寄存器设置if(clock==0) PWMCLK&=~(1<<channel);else PWMCLK|=(1<<channel);//PWM 极性选择设置if(polarity==0) PWMPOL&=~(1<<channel) ;else PWMPOL|=(1<<channel);//PWM 对齐方式设置if(align==0) PWMCAE&=~(1<<channel);else PWMCAE|=(1<<channel);}//**********************************************************//函数名:PWMGeneralInitial//函数功能:对预分频时钟,分频时钟A,分频时钟B和控制寄存器的配置//函数参数:4个byte类型//参数1 prclk/*Clock A or Clock B Prescaler SelectsPCKA/B2 PCKA/B1 PCKA/B0 Value of Clock A/B0 0 0 Bus clock0 0 1 Bus clock / 20 1 0 Bus clock / 40 1 1 Bus clock / 81 0 0 Bus clock / 161 0 1 Bus clock / 321 1 0 Bus clock / 641 1 1 Bus clock / 128*///参数2:scla// Clock SA = Clock A / (2 * PWMSCLA)//参数3:sclb// Clock SB = Clock B / (2 * PWMSCLB)//参数4:ctl/*control[CON67,CON45,CON23,CON01,PSWAI,PFRZ]PWM级联控制寄存器CON67,CON45,CON23,CON010 单独一个通道1 两个通道级联PSWAI 0 等待模式禁止时钟输入1 等待模式允许时钟输入PFRZ 0 冻结模式允许PWM时钟输入1 冻结模式禁止PWM时钟输入//返回值:无*///**************************************************************void PWMGeneralInitial(byte prclk,byte scla,byte sclb,byte ctl){//禁止所有的PWM通道PWME=0x00;//设置预分频参数PWMPRCLK=prclk;//设置A分频参数PWMSCLA=scla;//设置B分频参数PWMSCLB=sclb;//级联配置PWMCTL=ctl;}//***********************************************************//函数名称:PWMConcatenateSetting//函数功能:PWM级联输出配置//函数参数:1个byte类型,2个word类型//参数1:channel代表了当前配置的PWM通道//参数2:period 周期配置参数/*Left aligned output (CAEx = 0) PWMx Period = Channel Clock Period * PWMPERxCenter Aligned Output (CAEx = 1) PWMx Period = Channel Clock Period * (2 * PWMPERx)*///参数3:duty 占空比配置参数/*Polarity = 0 (PPOL x =0) Duty Cycle = [(PWMPERx-PWMDTYx)/PWMPERx] * 100%Polarity = 1 (PPOLx = 1) Duty Cycle = [PWMDTYx / PWMPERx] * 100%*///返回值:无//**************************************************************void PWMConcatenateSetting(byte channel,word period,word duty){if(channel>7) channel=7;switch(channel){case 0:case 1:PWMDisable(0); //禁止通道0PWMDisable(1); //禁止通道1PWMPER01=period; //设置周期寄存器PWMDTY01=duty; //设置占空比寄存器PWMEnable(0); //使能通道0;PWMEnable(1); //使能通道1;break;case 2:case 3:PWMDisable(2); //禁止通道2PWMDisable(3); //禁止通道3PWMPER23=period; //设置周期寄存器PWMDTY23=duty; //设置占空比寄存器PWMEnable(2); //使能通道2;PWMEnable(3); //使能通道3;break;case 4:case 5:PWMDisable(4); //禁止通道4PWMDisable(5); //禁止通道5PWMPER45=period; //设置周期寄存器PWMDTY45=duty; //设置占空比寄存器PWMEnable(4); //使能通道4;PWMEnable(5); //使能通道5;break;case 6:case 7:PWMDisable(6); //禁止通道6PWMDisable(7); //禁止通道7PWMPER67=period; //设置周期寄存器PWMDTY67=duty; //设置占空比寄存器PWMEnable(6); //使能通道6;PWMEnable(7); //使能通道7;break;default:break;}}定时器应用程序#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions */// 函数声明void OutputCompare_Init(void);;void Service_WD(void);void SetBusClock_24MHz(void);// 全局变量uint Timer7_Cnt=0;void main(void) {/* put your own code here */SetBusClock_24MHz();OutputCompare_Init();EnableInterrupts;for(;;) {_FEED_COP(); /* feeds the dog */} /* loop forever *//* please make sure that you never leave main */}void OutputCompare_Init(void){TSCR1_TEN = 0; /* Disable Timer module before adjusting registers. */ TIOS_IOS7 = 1; /* Set Channel 0 as output compare. */ TCTL1_OM7 = 0; /* Set channel 0 to toggle when a Timer match occurs. */ TCTL1_OL7 = 1; /* Set channel 0 to toggle when a Timer match occurs. */ TC7 = 0x4926; /* Set a value for channel 0 timer compare. */ TIE_C7I = 1; /* Enable channel 0 interrupt, handled by function TIM0ISR. */TSCR1_TSWAI = 1; /* Disables the timer module while in wait mode. */ TSCR1_TSFRZ = 1; /* Disables the timer counter while in freeze mode. */TSCR2_PR = 0x7; /* Set prescaler to divide by 128 */ TSCR2_TCRE = 1;TSCR1_TEN = 1; /* Timer Enable. *///中断周期:0x4926*128/24MHz = 100ms}#pragma CODE_SEG __NEAR_SEG NON_BANKEDvoid interrupt VectorNumber_Vtimch7 TIM7_ISR(void){Timer7_Cnt++;TFLG1 = TFLG1_C7F_MASK; /* Clear channel 0 flag. */}#pragma CODE_SEG DEFAULT// 看门狗void Service_WD(void){CPMUARMCOP = 0x55;CPMUARMCOP = 0xAA;}void SetBusClock_24MHz(void){CPMUOSC_OSCE = 1; /* enable ext osc *//*Initialise the system clock from a 16 MHz Crystal,24 MHz Bus CLK (48 MHz VCO, 48 MHz PLL)*/CPMUSYNR = 0x00 | 0x05; /* VCOFRQ[7:6], SYNDIV[5:0] */ CPMUREFDIV = 0x20 | 0x03; /* REFFRQ[7:6], REFDIV[3:0] */ CPMUPOSTDIV = 0x00; /* POSTDIV = 0 FPLL = FVCO */ while(!CPMUFLG_LOCK); /* wait for VCO to stabilize*/ Service_WD();CPMUCLKS_PLLSEL = 1; /* Switch clk to use PLL */}SCI应用程序#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions */// 函数声明void SCI0_Init(void);void SCI0_BR(unsigned long br);void SCI0_SendByte(char ch);void Service_WD(void);void SetBusClock_24MHz(void);// 全局变量char SCI_Flag = 0;char SCI_Rev = 0;void main(void) {/* put your own code here */SetBusClock_24MHz();SCI0_BR(38400);SCI0_Init();EnableInterrupts;SCI0_SendByte(0x01);SCI0_SendByte(0x02);SCI0_SendByte(0x03);for(;;) {_FEED_COP(); /* feeds the dog */if(SCI_Flag==1) {SCI_Flag = 0;SCI0_SendByte(SCI_Rev);}} /* loop forever *//* please make sure that you never leave main */}void Service_WD(void){CPMUARMCOP = 0x55;CPMUARMCOP = 0xAA;}void SetBusClock_24MHz(void){CPMUOSC_OSCE = 1; /* enable ext osc *//*Initialise the system clock from a 16 MHz Crystal,24 MHz Bus CLK (48 MHz VCO, 48 MHz PLL)*/CPMUSYNR = 0x00 | 0x05; /* VCOFRQ[7:6], SYNDIV[5:0] */ CPMUREFDIV = 0x20 | 0x03; /* REFFRQ[7:6], REFDIV[3:0] */ CPMUPOSTDIV = 0x00; /* POSTDIV = 0 FPLL = FVCO */ while(!CPMUFLG_LOCK); /* wait for VCO to stabilize*/Service_WD();CPMUCLKS_PLLSEL = 1; /* Switch clk to use PLL */}//串口初始化void SCI0_Init(void){SCI0CR1 = 0x00; /* 8 Data Bits, 1 Start Bit, 1 Stop Bit, No Parity */SCI0CR2 = 0x2C; /* 使能接收中断;使能Tx,Rx *//* SCIASR1, SCIACR1, SCIACR2, SCISR1, SCISR2, SCIDRH & SCIDRL left at default values */ }//串口波特率设置void SCI0_BR(unsigned long br){uint brPrescaler;brPrescaler = (uint)(24000000 / (16 * br));/* Set the Baud Rate */SCI0BDH = (uchar)((brPrescaler>>8));SCI0BDL = (uchar)(brPrescaler);}//串口发送字节void SCI0_SendByte(char ch){/* check SCI transmit data register is empty */while(SCI0SR1_TDRE == 0);SCI0DRL = ch;}//串口中断#pragma CODE_SEG __NEAR_SEG NON_BANKEDvoid interrupt VectorNumber_Vsci0 SCI0_ISR(void){SCI0CR2_RIE=0;while(SCI0SR1_RDRF == 0);SCI_Rev = SCI0DRL;SCI_Flag = 1;SCI0CR2_RIE = 1;}#pragma CODE_SEG DEFAULTADC应用程序#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions */// 函数声明void ADC_Init(void);uint ADC_GetValue(byte ch);void Service_WD(void);void SetBusClock_24MHz(void);void Delay(void);// 全局变量uint AD_Result;uint AD_Result2;void main(void) {/* put your own code here */SetBusClock_24MHz();ADC_Init();EnableInterrupts;for(;;) {_FEED_COP(); /* feeds the dog */AD_Result = ADC_GetValue(7);AD_Result2 = ADC_GetValue(0);} /* loop forever *//* please make sure that you never leave main */// AD初始化void ADC_Init(void){ATDCTL1 = 0x3F; /* 10-Bit resolution ,discharge before sampling. */ATDCTL3 = 0x88; /* Right Justified Data, Single conversion sequence */ATDCTL4 = 0xE1; /* 6 MHz, Notice: 12MHz Max ATD Clock, Fatdlk = FBUS/(2*(PRS+1)) *//* 26 ATD Clock cycles sample time */}// ADC通道采集uint ADC_GetValue(byte ch){ATDCTL5 = 0x0F & ch; /* Start Continuous Conversions on ch */while (!ATDSTAT0_SCF); /* wait for conversion sequence to complete */return ATDDR0;}// 看门狗void Service_WD(void){CPMUARMCOP = 0x55;CPMUARMCOP = 0xAA;}void SetBusClock_24MHz(void){CPMUOSC_OSCE = 1; /* enable ext osc *//*Initialise the system clock from a 16 MHz Crystal,24 MHz Bus CLK (48 MHz VCO, 48 MHz PLL)*/CPMUSYNR = 0x00 | 0x05; /* VCOFRQ[7:6], SYNDIV[5:0] */CPMUREFDIV = 0x20 | 0x03; /* REFFRQ[7:6], REFDIV[3:0] */CPMUPOSTDIV = 0x00; /* POSTDIV = 0 FPLL = FVCO */while(!CPMUFLG_LOCK); /* wait for VCO to stabilize*/ Service_WD();CPMUCLKS_PLLSEL = 1; /* Switch clk to use PLL */ }void Delay(void){uint dummy_ctr;for(dummy_ctr=0; dummy_ctr<0x007f;dummy_ctr++){;}}。
飞思卡尔单片机 DG128 PWM 应用实例

HCS12微控制器系列教程(八)---PWM 应用实例PWM 初始化步骤总结1、禁止PWM PWME = 02、选择时钟 PWMPRCLK,PWMSCLA,PWMSCLB,PWMCLK3、选择极性 PWMPOL4、选择对齐方式 PWMCAE5、选择占空比和周期 PWMDTYx, PWMPERx6、使能PWM PWME = 1【例程1】程序描述:由通道PTP3口输出频率为1K,占空比为50%的方波程序如下:#include <hidef.h> /* common defines and macros */#include <mc9s12dg128.h> /* derivative information */#pragma LINK_INFO DERIVATIVE "mc9s12dg128b"/***********初始化函数*************//*时钟初始化程序*/void PLL_Init(void) //PLLCLK=2*OSCCLK*(SYNR+1)/(REFDV+1){ //锁相环时钟=2*16*(2+1)/(1+1)=48MHzREFDV=1; //总线时钟=48/2=24MHzSYNR=2;while(!(CRGFLG&0x08));CLKSEL=0x80; //选定锁相环时钟}/*PWM初始化程序*/void PWM_Init(void){PWME_PWME3=0x00; // Disable PWM 禁止PWMPRCLK=0x33; // 0011 0011 A=B=24M/8=3M 时钟预分频寄存器设置 PWMSCLA=150; // SA=A/2/150=10k 时钟设置PWMSCLB=15; // SB=B/2/15 =100k 时钟设置PWMCLK_PCLK3=1; // PWM3-----SB 时钟源的选择PWMPOL_PPOL3=1; // Duty=High Time 极性设置PWMCAE_CAE3=0; // Left-aligned 对齐方式设置PWMCTL=0x00; // no concatenation 控制寄存器设置PWMPER3=100; // Frequency=SB/100=1K 周期寄存器设置PWMDTY3=50; // Duty cycle = 50% 占空比寄存器设置 PWME_PWME3=1; // Enable PWM 使能}/**********主函数**************/void main(void){PLL_Init();PWM_Init();/* put your own code here */EnableInterrupts;for(;;) {} /* wait forever *//* please make sure that you never leave this function */}。
(整理)Timer模块介绍.

>手把手教你写S12XS128程序(17)--Timer模块介绍1时间:2009-12-29 11:51来源:电子设计吧作者:dzsj8 点击:380次1、简述MC9S12XS128定时器模块与MC9S12DG128 ECT部分功能完全类似,以下均以ECT模块介绍xs128定时器模块。
HC12 增强型捕捉计时器模块在HCS12标准定时器的基础上增加了一些特点,用以扩展它的应用范围,特别是在汽车ABS 方面。
基准计时器的核心仍然是一个16 位的可编程计数器,其时钟源来自一个预分频器。
该计时器可以被应用于多个方面,包括在对输入波形进行测量的同时产生一个输出波形。
波形的脉宽可以在几微秒到数秒的范围内变化。
增强型定时器模块(ECT)的结构框图如下,ECT功能相当于高速的I/O口,由一个4位预分频器、一个16位自由运行计数器,8个16位IC/OC通道,2个16位脉冲累加器以及一个16位模数递减计数器组成。
ECT实际上是一个16位的可编程计数器,它的基本时钟频率可以通过预分频器设置,用于产生波形输出,测量输入波形,统计脉冲个数,可以作为定时中断功能和独立时钟基准。
2、运行模式停止:由于时钟停止,计时器和计数器均关闭。
冻结:计时器和计数器均保持运行,直到T SCR($06)的T SFRZ 位被置1。
等待:计数器保持运行,直到T SCR($06)的T SWAI 位被置1。
正常:计时器和计数器均保持运行,直到T SCR($06)的T EN 位和M CCTL($26)的MCEN 位被分别清0。
手把手教你写S12XS128程序(18)--Timer模块介绍2时间:2009-12-30 22:12来源:电子设计吧作者:dzsj8 点击:366次IC 通道组IC 通道组由四个标准的缓冲通道IC0-IC3 和四个非缓冲通道IC4-IC7 组成,两部分的基本功能都是捕捉外部事件发生的时刻,但是缓冲通道除了IC/OC 寄存器TCn 外,还设有保持寄存器TCnH,此外还在入口设置了延迟计数器,用来提高抗干扰能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Timer寄存器说明
1、定时器/计数器系统控制寄存器1(TSCR1)
TSCR1 寄存器是定时器模块的总开关,它决定模块是否启动以及在中断等待、BDM 方式下的行为,还包括标志的管理方式。
其各位的意义如下:
TEN:定时器使能位,此外它还控制定时器的时钟信号源。
要使用定时器模块的IC/OC 功能,必须将TEN 置位。
如果因为某种原因定时器没有使能,脉冲累加器也将得不到ECLK/64 时钟,因为ECLK/64 是由定时器的分频器产生的,这种情况下,脉冲累加器将不能进行引脚电平持续时间的累加。
0:定时器/计数器被禁止,有利于降低功耗。
1:定时器/计数器使能,正常工作。
TSWAI:等待模式下计时器关闭控制位。
【注意】定时器中断不能用于使MCU 退出等待模式。
0:在中断等待模式下允许MCU 继续运行。
1:当MCU 进入中断等待模式时,禁止计时器。
TSFRZ:在冻结模式下计时器和计数器停止位。
0:在冻结模式下允许计时器和计数器继续运行。
1:在冻结模式下禁止计时器和计数器,用于仿真调试。
【注意】TSFRZ 不能停止脉冲累加。
TFFCA:定时器标志快速清除选择位。
0:定时器标志普通清除方式。
1:对于TFLGl($0E)中的各位,读输入捕捉寄存器或者写输出比较寄存器会自动清除相应的标志位CnF。
对于TFLG2($0F)中的各位,任何对TCNT 寄存器($04、$05)的访问均会清除TOF 标志;任何对PACN3 和PACN2 寄存器($22,$23)的访问都会清除PAFLG 寄存器($21)中的PAOVF 和PAIF 位。
任何对PACN1 和PACN0 寄存器($24,$25)的访问都会清除PBFLG 寄存器($21)中的PBOVF 位。
【说明】这种方式的好处是削减了另外清除标志位的软件开销。
此外,必须特别注意避免对标志位的意外清除。
2、计时器系统控制寄存器2(TSCR2)
寄存器偏移量:$000D
TOI:定时器/计时器溢出中断使能。
0:中断被禁止。
1:当TOF 标志被置位时发出硬件中断请求。
【注意】TOF标志位在TFLG中
TCRE:定时器/计数器复位使能。
该位在通道7 成功输出比较之后允许时钟计数器复位。
该操作模式类似于递增型计数器。
0:计数器复位禁止,计数器自由计数。
1:通道7 成功输出比较后计数器将被复位。
【说明】如果TC7=$0000 并且TCRE=1,TCNT 将继续保持$0000。
如果TC7=$FFFF 并且TCRE=1,当TCNT 从$FFFF 到$0000 之间被复位后TOF 将永远不被置位。
PR2,PR1,PR0:计数器预分频选择。
【说明】新设定的分频因子不会立即起作用,直到下一个触发沿到来那里所有预分频计数器值均为零。
3、控制寄存器(TCTLl-TCTL4)
TCTLl-TCTL4 分为两组,分别对IC 和OC 电路进行设定,每组16 个二进制位,每两个二进制位管理一个通道。
其中TCTLl、TCTL2 设定各个OC 通道匹配时的动作,包括切断OC 与输出引脚的联系,而TCTL3、TCTL4 设定IC 响应引脚的何种动作,包括禁止IC 的响应。
OMn、OLn 分别设定输出方式和输出电平,这8 对控制位(OM7、OL7---OMO、OL0)编码后用于指定通道比较成功后的输出动作。
如果每对当中至少有一个为1,对应引脚就固定为相应通道的输出,而与DDRT 中的对应位无关。
当二者同时为0 时,OC 与输出引脚断开。
输出比较动作设置
TCTL3 寄存器偏移量:$000A
TCTL4 寄存器偏移量:$000B
各个控制位的作用如下:
EDGnB、EDGnA 输入捕捉边沿控制位,这8 对控制位(EDG7B、EDG7A—EDG0B、EDG0A)对输入捕捉的边沿检测电路进行设置。
当二者同时为0 时,IC 与输入引脚断开。
【注意】为了使OMn、OLn 指定的引脚动作有效,OC7M 中的对应位必须清0。
若要使用16 位脉冲累加器A 和B,并使它们分别独立于IC/OC7 和IC/OC0,必须设置对应的IOSn:1、OMn=0、OLn=0,同时寄存器OC7M 中的OC7M7、OC7M0 位必须清0。
4、主定时器中断标志寄存器(TFLG1、TFLG2)
所示的TFLG1、TFLG2 为中断标志寄存器,其中TFLG1 对应8 个IC/OC 通道,当某CnF=1 时说明对应的IC/OC 通道有动作,表明该通道有中断事件发生。
TFLG2 只有一个标志位TOF,作为核心计数器的中断请求标志。
当TOF=1 时说明核心计数器溢出。
要清除某个标志位,只需向该位写1,向某位写0 不影响该位的状态。
当TSCR 中的TFFCA 位置位时,读IC 通道或写OC 通道($10-$1F)将自动清除该通道标志CnF,对TCNT 的任何访问将自动清除TFLG2。
CnF:IC/OC 通道中断请求标志。
0:上次清除标志以来,IC/OC 通道没有有效动作。
1:IC/OC 通道已经出现动作。
将寄存器ICSYS($2B)中的TFMOD 位和ICOVW 寄存器($2A)联合使用,可以使定时器在两次捕捉后才产生中断,而不是每次捕捉均产生动作。
两次捕捉结果分别在捕捉和保持寄存器里面。
TOF:定时器溢出标志,当16 位自由定时器从$FFFF 回滚到$0000 时,该位置位。
将$80 写入到TFLG2 将自动清除该位(写1清零)。
详见前面关于TMSK2 中TCRE 控制位的解释。
5、计时器中断使能寄存器(TIE)
可在任何时候读或写。
TIE 寄存器中的位与状态寄存器TFLG1 中的标志位相对应。
如果将TIE 中的某位清0,相应的标志位就不能引起硬件中断。
如果被置1,相应的标志位就可以引起中断。
C7I-C0I:输入捕捉/输出比较“x”中断使能。
6、IC/OC 选择寄存器(TIOS)
IC 还是OC 方式。
当某位IOSn=0 时,对应的通道n 为输入捕捉(1C)通道,否则当IOSn=1 时,通道n 为输出比较(OC)通道。
其中的各位可以在任何时候写入或读出。
【说明】上电后该寄存器默认为$00,TSCR 中的TEN 默认也为0,这时所有通道处于通用I/O 方式,将TEN 置位后各个通道进入IC 方式,要将某些通道设置成OC 方式,必须对TIOS 进行设置,即将有关位置1。
设置成OC 的通道其引脚具有降功率驱动功能,设置成IC 的通道具有内部上拉功能,但上电后均处于关闭状态,可以根据需要启用。
7、IC/OC 寄存器(TC0-TC7)
每个IC 或OC 通道都设置有一个16 位的寄存器,对于IC(输入捕捉)通道,当通道的边沿探测器检测到由EDGnA、EDGnB 指定的条件时,将自由定时器的值捕捉到寄存器TCn,随后程序可以读取和处理;对于OC(输出比较)通道,程序将预定的时刻写入到TCn,当自由定时器的值与其相等时,触发由OMn、OLn 所指定的输出动作。
定时器模块共有TC7-TC0 等8 个16 位IC/OC 寄存器。
TC0
TC1
TC2
TC3
TC4
TC5
TC6
TC7
8、定时器核心寄存器(TCNT)
TCNT 是递增计数器,它不停地对内部时钟信号计数、程序可随时读取,但在普通模式下禁止写入。
TCNT 应按字访问,分别访问高、低字节可能得到错误的结果。
【说明】在特殊模式下,TCNT 可写,但因为写操作与预分频器时钟不同步,TCNT寄存器写入后,其第一个周期可能是一个不同的值。
9、输出比较通道7 屏蔽寄存器(OC7M)
可在任何时候读或写。
前面已经说明,OC7 具有特殊地位,它匹配时可以直接改变其他7 个输出引脚的状态,并覆盖各个引脚原来的匹配动作结果,寄存器OC7M 决定哪些通道将处于OC7 的管理之下。
OC7M 中的各位与PORTT 口寄存器的各位一一对应。
当通过TIOS 将某个通道设定为输出比较时,将OC7M 中的相应位置1,对应
的引脚就是输出状态,与DDR 中的对应位的状态无关。
但OC7Mn 并不改变DDR 相应位的状态。
OC7M 具有更高的优先级,它优于通过TCTL1 和TCTL2 寄存器中的OMn 和OLn 设定的引脚动作,若OC7M 中某个位置1,就会阻止相应引脚上由OM 和OL 设定的动作。
10、输出比较通道7 数据寄存器(OC7D)
可在任何时候读或写。
OC7M 对于其他OC 输出引脚的管理限于将某个二进制值送到对应引脚,这个值保存在寄存器OC7D 中的对应位中。
当OC7 匹配成功后,若某个
OC7Mn=1,则内部逻辑将OC7Dn 送到对应引脚。
OC7D 中的各位与PORTT 口寄存器的各位一一对应。
当通道7 比较成功时,如果OC7M 中的某个位为1,OC7D 中的对应位将被输出到PORTT 的对应引脚。
当OC7M 中的某个位为1 时,通道7 匹配成功的动作如果与通道6-0 的动作发生在同一个周期,前者将覆盖后者。
因此各个通道的动作将依赖于OC7D中各个位的设置。