相位超前校正
机械工程控制基础相位超前校正装置的奈氏曲线为

一、单选题 共10题,40分1相位超前校正装置的奈氏曲线为()。
A圆B上半圆C下半圆D45°弧线正确答案:B2系统的时间响应振动性质有自由响应和( )。
A非强迫响应B随机响应C强迫响应D初始响应正确答案:C3某系统的开环传递函数为G(s)=(0.5s-1)/(0.5s+1),则其|G(jω)|=()。
A0B0.2C0.5D1正确答案:D4单位反馈系统开环传递函数为G(s)=5/(s2+6s+s),当输入为单位阶跃时,则其位置误差为()。
A2B0.2C0.5D0.05正确答案:C5误差信号与输入信号之比为( )。
A误差传递函数B反馈传递函数C二次反馈函数D负反馈函数正确答案:A6开环系统的幅频特性是各串联典型环节幅频特性的幅值之( )。
A积B和C减D最大者正确答案:A7二阶系统的阻尼比ζ,等于( )。
A系统的粘性阻尼系数B临界阻尼系数与系统粘性阻尼系数之比C系统粘性阻尼系数与临界阻尼系数之比D系统粘性阻尼系数的倒数正确答案:C8( )是指系统的被控制量(输出量)与控制作用之间存在着反馈的控制方式。
A开环控制B反馈系统C闭环控制D放大系统正确答案:C9( )是在实际系统中是可以测量的,因而具有一定的物理意义。
A误差B公差C偏差D残差正确答案:C10在反馈控制系统中,参考输入与猪反馈之差称为( )。
A主反馈B负反馈C偏差D扰动正确答案:C二、多选题 共5题,20分1控制系统按照系统内信号的传递形式分为。
( )A连续系统B非线性系统C离散系统D随动系统C正确答案:AC2若某最小相位系统的相角裕度γ>0°,则下列说法错误的是()。
A不稳定B只有当幅值裕度kg>1时才稳定C稳定D不能判用相角裕度判断系统的稳定性我的得分:2分D正确答案:ABD3以下性能指标中,表征系统灵敏性的是()。
A延迟时间B上升时间C峰值时间D超调量BC正确答案:ABC4下列属于典型环节的是( )。
A比例环节B惯性环节C微分环节D积分环节BCD正确答案:ABCD5反馈控制系统按参考输入形式分为( )。
超前校正的原理
超前校正的原理是利用超前网络的超前特性来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原系统中的元件造成的过大的相角滞后。
通过调整补偿器的增益和相位,可以实现系统的快速响应,提高其动态性能和稳定性。
超前校正装置的传递函数具有高通滤波器的特性,其最大相位超前角出现在新的剪切频率处。
在复平面上,超前校正装置的特点是其传递函数的零点总是位于极点的右方。
超前校正可以改善系统的相位裕量和穿越频率,减小系统的超调量,加快系统的响应速度。
以上内容仅供参考,建议查阅超前校正的相关书籍或咨询相关学者,以获取更准确和深入的理解。
《相位超前校正》课件 (2)

相位超前校正,一种前沿的信号处理技术,通过调整信号相位,可在众多领 域发挥重要作用。
什么是相位超前校正
相位超前校正是一种信号处理技术,通过调整信号的相位来实现某种目标, 常用于增加系统稳定性和性能。
相位超前校正的应用领域
通信系统
相位超前校正可以提高通信信号的质量和可靠性, 减少传输中的失真和干扰。
相位超前校正技术的优势
• 提高系统的稳定性和性能 • 减少信号传输中的失真和干扰 • 改善音频和图像处理的质量 • 增加系统的抗干扰能力 • 适用于多个领域和应用
相位超前校正技术的发展前景
随着科技的不断进步和应用领域的扩展,相位超前校正技术将在通信、音频、 图像和雷达等领域中发挥越来越重要的作用。
相位超前校正的稳定性分析
1
系统稳定性
相位超前校正可以减少系统的震荡和振荡,提高系统的稳定性和鲁棒性。
2抗Βιβλιοθήκη 扰能力相位超前校正可以有效减少外部干扰对系统性能的影响,提高系统的抗干扰能力。
3
频率补偿
相位超前校正可以对信号的频率响应进行补偿,使系统在不同频率下达到更好的 性能。
相位超前校正系统的设计
相位超前校正系统的设计包括信号采集、相位调整、反馈控制和输出等环节,需要综合考虑系统的参数和性能 要求。
音频处理
在音频处理中,相位超前校正可用于消除回音、 减少噪音和改善音频信号的清晰度。
雷达与无线电
相位超前校正在雷达和无线电系统中被广泛应用, 以提高探测性能和信号的可靠性。
医学图像处理
相位超前校正技术可用于医学图像处理,改善图 像的清晰度、对比度和诊断能力。
相位超前校正的原理讲解
相位超前校正通过引入一个预先设定的相位延迟,使输入信号的相位与输出信号的相位保持一致,从而实现稳 定性和性能的提升。
相位超前校正

确定开环增益K 画出未补偿系统的Bode图,并求 0 , L g 0
稳态误差的要求
m 0
1 sin m 1 sin m
5 ~10
求未补偿系统幅值为 10 lg( 1 ) 处的频率, m c
初步确定超前补偿网络参数 , T
L 0 ( c ) 10 lg 1
0
进而求出超前网络的 值。
② 若事先未提出对校正后系统截止频率 c 的要求,可从给出 的相角裕度 要求出发,通过以下的经验公式求得超前网络 的最大超前角 m ;
1 sin m 1 sin m
m 0
arcsin
1 1
( m )
1 sin m 1 sin m
1
当 m 时,网络的对数幅值为 L c ( m ) 10 lg
二、串联超前校正
超前网络进行串联校正的基本原理:利用超前网络的相角超前 特性。只要正确地将超前网络地转折频率 1 T 和1 ( T ) 选在待校 正系统截止频率的两旁,并适当选择参数 和 T ,就可以使已 校正系统的截止频率和相角裕度满足性能指标的要求,从而改 善闭环系统的动态性能。闭环系统的稳态性能要求可通过选择 已校正系统的开环增益来保证。
Gc (s) Ts 1
T
1
m
Ts 1
满足性能指标要求?
统在单位斜坡输入信号作 用时, ① 稳态误差 e ss 0 . 1, ② 相角裕度 45 , ③ 幅值裕度 L g 10 dB ,试设计串联无源超前网络。
R (s )
K
C (s )
相位超前滞后的作用
相位超前和滞后在控制系统中的作用如下:
1. 超前校正:目的是改善系统的动态性能,在系统静态性能不受损的前提下,提高系统的动态性能。
通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。
一般使校正环节的最大相位超前角出现在系统新的穿越频率点。
2. 滞后校正:通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。
它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。
3. 滞后-超前校正:是滞后校正与超前校正的组合。
它具有超前校正的提高系统相对稳定性和响应快速性;同时又具有滞后校正的不影响原有动态性能的前提下,提高系统的开环增益,改善系统的稳定性能。
它具有低频端和高频端频率衰减的特性,故又称带通滤波器。
这种校正方式适用于对校正后系统的动态和静态性能有更多更高要求的场合。
6-2 超前-滞后校正

1
2.65
引入超前校正网络的传递函数:
1 α Ts 1 1 0.378s 1 G c (s) α Ts 1 3 0.126s 1
(4)引入 倍的放大器。为了补偿超前网络造成的衰减,引 入倍的放大器, 3 。得到超前校正装置的传递函数
1 0.378s 1 0.378s 1 α G 0 (s) 3 3 0.126s 1 0.126s 1
《自动控制原理》
—— 频率特性法(6-2)
(超前校正)
1
6.3 频率域中的无源串联超前校正 三个频段的概念
L() dB
15
c
15
低频段
中频段
高频段
2
校正方法通常有两种: 1. 分析法。实际上是一种试探的方法,可归结为: 原系统频率特性+校正装置频率特性=希望频率特性 G0(jω) + Gc(jω) = G(jω) 从原有的系统频率特性出发,根据分析和经验,选 取合适的校正装置,使校正后的系统满足性能要求。 2. 综合法。这种方法的基本可归结为: 希望频率特性原系统频率特性=校正装置频率特性 G(j) G0(j) = Gc(j) 根据系统品质指标的要求,求出满足性能的系统开 环频率特性,即希望频率特性。再将希望频率特性与 原系统频率特性相比较,确定校正装置的频率特性。
17
通过超前校正分析可知: (1)提高了控制系统的相对稳定性——使系统的稳定 裕量增加,超调量下降。 工业上常取α=10,此时校正装置可提供约550的超前 相角。为了保证系统具有300600的相角裕量,要求校 正后系统ωc处的幅频斜率应为-20dB/dec,并占有一定 的带宽。 (2) 加快了控制系统的反应速度——过渡过程时间减 小。由于串联超前校正的存在,使校正后系统的c、r 及b均变大了。带宽的增加,会使系统响应速度变快。 (3)系统的抗干扰能力下降了—— 高频段抬高了。 (4)控制系统的稳态性能是通过步骤一中选择校正后 系统的开环增益来保证的。
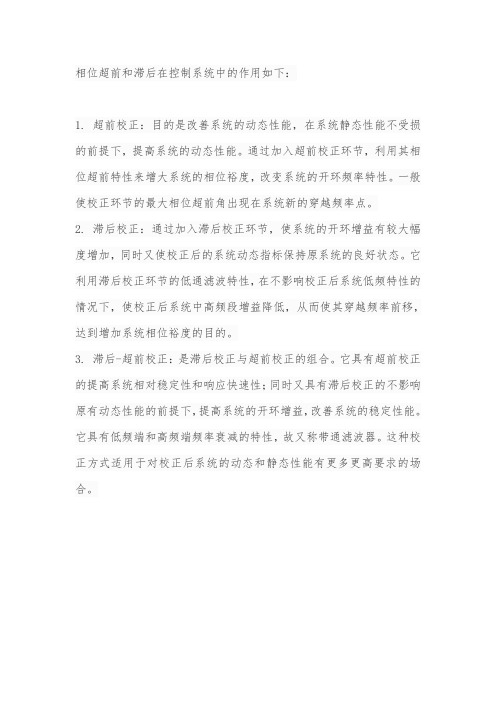
用根轨迹法设计相位超前校正网络.
10
例:有一单位反馈控制系统的开环传函为 G( s) 足下列性能指标;
2500k ,要求满 s( s 25)
(1)当输入是一个1 rad s的单位速度函数时,输出的速度函数
与输入速度函数的最终稳态误差不大于0.01rad;
R( s)
Kr s ( s 2)
C (s)
3
解: 2 (1).由 p 20% ,由式 p e 1 可求得 0.46 ,取 0.5 由 ts 3 得 n 6 rad s ; n 得闭环主导极点 A1,2 n jn 1 2 3 j 3 3
(3)根据稳态指标求出系统所需要的误差系数 K(即开环增益 K0); 0 (4)求出系统为了满足稳态性能指标,误差系数需要增加的倍数
1 K0 ,这 个需要增加的倍数由滞后网络的这一对偶极子提 b K
供;
9
(5)选择滞后校正网络的零点 Z c 及极点 Pc ,使满足 Z c Pc 1 ,
原系统的开环传函为:
根轨迹增益为:
Kr
m
G( s) H ( s)
v n
sv (s p j )
j v 1
i 1 n
s
s pj j v 1
m
s zi i 1
开环增益为: K Kr
7
zi
pj j v 1
i 1 n
1 K ( s z ) ( s )b rc i 校正后系统的开环传函为: bT i 1 Gc ( s)G( s) H ( s) n 1 v s (s p j ) (s ) 校正后在A点的根轨迹增益 T j v 1
21 , 3.画水平线 A1B ,作角平分线 AC ,再作 CA D EAC A1D 1 2
说明相位超前和相位滞后校正的各自特点

说明相位超前和相位滞后校正的各自特点
相位超前和相位滞后校正是相位校正技术中常用的两种方法,它们各有其特点。
相位超前是一种电力系统调度中常用的方法,其目的在于改善相位不平衡的紊
乱状态。
它的主要思想是通过改变某一节点的电压相位,使得系统设备各自的相位组合恢复到正确的相位平衡状态。
它的特点是,它只能用于调节相位不平衡的节点,而不能用于调节全局的相位不平衡问题。
另一种常用的相位校正方法是相位滞后校正法,它也称为纵向相位调整,它将
节点之间的电压相位关系作为一个阶段。
它的特点是,它可以用于调节全局的电压相位不平衡,也可以用于调节相位不平衡的节点。
它的优点是,它不仅可以提高系统的发电能力,而且可以改善系统的负荷调度效率。
总之,相位超前和相位滞后校正是相位校正技术中重要的两种方法,它们各有
其特点和优势。
它们的正确使用和操作可以改善系统的负荷调度能力和发电能力,从而提高系统的运行稳定性和安全性,保证用电安全。
控制工程基础第五章——校正
三 系统常用校正方法(2)
前馈校正 (复合控制)
对输入的
对扰动的
系统校正的基本思路
系统的设计问题通常归结为适当地设计串 联或反馈校正装置。究竟是选择串联校正还是 反馈校正,这取决于系统中信号的性质、系统 中各点功率的大小、可供采用的元件、设计者 的经验以及经济条件等等。
一般来说,串联校正可能比反馈校正简单, 但是串联校正常需要附加放大器和(或)提供隔离。 串联校正装置通常安装在前向通道中能量最低的地方。 反馈校正需要的元件数目比串联校正少,因为反馈校 正时,信号是从能量较高的点传向能量较低的点,不 需要附加放大器。
显然不满足要求。
令 20lgG(j0)0 或 G0(j0) 1 可求得ω0,再求得γ。
☆ 超前校正设计的伯德图
☆ 超前校正设计⑵
☆ 超前校正设计⑶
⒊确定超前校正装置的最大超前相位角
m4 52 75 23
⒋确定校正装置的传递函数
①确定参数α ②确定ωm
1 1 s sii n n m m1 1 s sii2 2n n 3 32.28
PID 传递 函数
G c(s)U E ((s s))K PK I1 sK D s
Gc(s)KP(1T1IsTDs)
KP——比例系数;TI——积分时间常数; TD——微分时间常数
二 PID控制器各环节的作用
比例环节 积分环节 微分环节
即时成比例地反映控制系统的偏差 信号,偏差一旦产生,控制器立即产 生控制作用,以减少偏差。
为了充分利用超前装置的最大超前相位角,一般取校正后系统的
开环截止频率为 0 m 。故有 Lc(m)L(0 ' )0d B
于是可求得校正装置在ωm处的幅值为
2 lG 0 g c (jm ) 1 l0 g 1 l2 0 g .2 3 8 .5 d8 B最后得校正装置
自动控制系统的校正
自动控制系统的校正
在反馈校正方式中,校正装置H2(s)反馈包围了系统的部分环节,它同样可以改变系统 的结构、参数和性能,使系统的性能达到所要求的性能指标。
通常反馈校正又可分为硬反馈和软反馈。 反馈校正的主要作用是: 1、负反馈可以扩展系统的频带宽度,加快响应速度。 2、负反馈可以及时抑制被包围在反馈环内的环节,由于参数变化、非线性因素以及各 种干扰对系统性能的不利影响。 3、负反馈可以消除系统不可变部分中不希望的特性,使该局部反馈回路的特性取决于 校正装置。 4、局部正反馈可以提高系统的放大系数。
自动控制系统的校正
RC网络
相位滞后校正装置
R1
R2 C2
相位超前校正装置
C1 R1
R2
传递函数
G1 ( s) 式中
2s 1s
1 1
1 (R1 R2 )C2 2 R2C2 2 1
11
L() 1 2
() /
G(s) K (1s 1) 2s 1
式中
K R1 R1 R2
1 R1C1
2
自动控制系统的校正
1.4 前馈控制的概念
通过前面的分析我们已经看到串联校正和反馈校正都能有效地改善系统动态和稳态性 能,因此在自动控制系统中获得普遍的应用。此外,在自动控制系统中还有一种能有效地改 善系统性能的方法,这就是前馈控制。通常把前馈控制与反馈控制相结合的控制方式称为复 合控制。前馈控制又可分为按输入进行补偿和按扰动补偿两类。
ห้องสมุดไป่ตู้
1 2
1
2
() /
90
相位超前校正和滞后校正的区别
相位超前校正和滞后校正的区别相位超前校正和滞后校正是电路中常用的两种方法,用于调整信号的相位。
它们在电子领域中具有重要的应用,尤其在通信系统和控制系统中起着至关重要的作用。
本文将详细介绍相位超前校正和滞后校正的区别。
一、相位超前校正相位超前校正是一种使信号相位提前的技术。
在电路中,我们常常遇到信号相位滞后或者信号延迟的情况,这是由于电路元件的特性或者传输介质的影响所致。
为了解决这个问题,我们可以采用相位超前校正的方法。
相位超前校正的原理是在信号路径中引入一个或多个滤波器,并通过合理设计滤波器的参数,使得滤波器对频率较低的信号具有较大的增益,从而使得信号的相位提前。
相位超前校正常用于控制系统中,以提高系统的稳定性和响应速度。
例如,在飞机的自动驾驶系统中,采用相位超前校正可以使飞机更加稳定地飞行。
二、滞后校正滞后校正则是一种使信号相位延迟的技术。
在某些情况下,我们需要延迟信号的相位,以满足特定的要求。
比如,在音频处理中,我们可能需要将不同的音频信号进行时间对齐,以达到更好的音效效果。
此时,我们可以采用滞后校正的方法来实现。
滞后校正的原理是通过引入一个或多个滤波器,在信号路径中对频率较高的信号进行衰减,从而使得信号的相位发生延迟。
滞后校正常用于音频处理、图像处理等领域,以实现信号的同步和对齐。
例如,在音频混音中,我们可以采用滞后校正的方法,将不同音轨的信号进行时间对齐,以获得更好的混音效果。
三、相位超前校正与滞后校正的区别相位超前校正和滞后校正的区别主要体现在以下几个方面:1. 目的不同:相位超前校正的目的是使信号的相位提前,以提高系统的稳定性和响应速度;滞后校正的目的是使信号的相位延迟,以实现信号的同步和对齐。
2. 原理不同:相位超前校正通过引入滤波器来增益低频信号,从而使得信号的相位提前;滞后校正通过引入滤波器来衰减高频信号,从而使得信号的相位延迟。
3. 应用领域不同:相位超前校正主要应用于控制系统中,以提高系统的稳定性和响应速度;滞后校正主要应用于音频处理、图像处理等领域,以实现信号的同步和对齐。
自控实验报告超前校正(3篇)
第1篇一、实验目的1. 理解超前校正的原理及其在控制系统中的应用。
2. 掌握超前校正装置的设计方法。
3. 通过实验验证超前校正对系统性能的改善效果。
二、实验原理超前校正是一种常用的控制方法,通过在系统的前向通道中引入一个相位超前网络,来改善系统的动态性能。
超前校正能够提高系统的相角裕度和截止频率,从而改善系统的快速性和稳定性。
超前校正装置的传递函数一般形式为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K \) 为校正装置的增益,\( T_{s} \) 为校正装置的时间常数。
三、实验设备1. 控制系统实验平台2. 数据采集卡3. 计算机及仿真软件(如MATLAB/Simulink)4. 待校正系统四、实验步骤1. 搭建待校正系统模型:在仿真软件中搭建待校正系统的数学模型,包括系统的传递函数、输入信号等。
2. 分析系统性能:通过仿真软件分析待校正系统的性能,包括稳态误差、超调量、上升时间等。
3. 设计超前校正装置:根据待校正系统的性能要求,设计合适的超前校正装置参数。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
5. 实验数据分析:对实验数据进行分析,比较校正前后系统的性能差异。
五、实验内容1. 系统模型搭建:搭建一个简单的二阶系统模型,其传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]2. 系统性能分析:分析该系统的稳态误差、超调量、上升时间等性能指标。
3. 设计超前校正装置:根据系统性能要求,设计一个超前校正装置,其传递函数为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K = 2 \),\( T_{s} = 0.5 \)。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
基于MATLAB的相位超前校正系统实现

基于MATLAB的相位超前校正系统实现丁伟玲;孙立军【摘要】基于MATLAB实现相位超前校正系统的设计与仿真分析,给出利用频域分析进行系统校正的一般工作流程。
采用实例演示典型设计方法给出通用程序,由MATLAB绘制校正前后系统的Bode图及单位阶跃响应曲线,对相位超前校正进行仿真与分析。
%In the article, it realized the design and simulation analysis of phase lead correction system based on MATLAB, and pro-posed general work flow of system correction using frequency domain analysis. It demonstrated a typical design method and proposed a general program through an example, drew Bode diagram and unit step response curve of system before and after correcting by MAT-LAB, and made contrast intuitively.【期刊名称】《农业科技与装备》【年(卷),期】2015(000)007【总页数】4页(P40-42,46)【关键词】相位超前;校正;Bode图;MATLAB【作者】丁伟玲;孙立军【作者单位】潍坊五洲浩特电气有限公司,山东潍坊260106;山东经贸职业学院,山东潍坊 261011【正文语种】中文【中图分类】TP391.9在三相智能电表的成品检测中,需要测试三相电压电流对称度、相位、基本误差和标准偏差等指标,若测试结果超过相关国家标准,需要进行校正再设计。
通过校正,可以提升系统的稳定性、准确性和快速性,同时还要兼顾实现性和经济性。
西交20春《自动控制理论》在线作业2参考答案

西交《自动控制理论》在线作业
试卷总分:100 得分:100
一、多选题(共13 道试题,共39 分)
1.相位超前校正具有以下特点()
A.系统带宽变窄,降低了系统响应的快速性
B.增益和型次未改变,稳态精度变化不大
C.加大带宽,加快了系统的响应速度,即改善系统的瞬态性能
D.增大相位裕度,提高了系统的相对稳定性
答案:BCD
2.属于代数稳定性判据的有()。
A.奈奎斯特判据
B.波德判据
C.胡尔维兹判据
D.劳斯判据
答案:CD
3.关于传递函数正确的说法有( )
A.传递函数的分母与系统的输入无关
B.传递函数分母中s的阶次不小于分子中s的阶次
C.传递函数是无量纲的
D.不同物理类型的系统,可以具有相同形式的传递函数。
系统的性能指标与校正解读

PID 不仅适用于数学模型已知的控制系 统,而且对大多数数学模型难以确定的 工业过程也可应用。
PID 控制参数整定方便,结构灵活,在
众多工业过程控制中取得了满意的应用
效果,并已有许多系列化的产品。并且,
随着计算机技术的迅速发展,数字PID
控制也已得到广泛和成功的应用。
1、P控制(比例控制)
P控制对系统性能的影响:
1)Kp>1
开环增益加大,稳态误差减小;
幅值穿越频率增大,过渡过程时间缩短; • 系统稳定程度变差。只有原系统稳定裕 量充分大时才采用比例控制。 2)Kp<1 与Kp>1时,对系统性能的影响正好相反。
2、PD控制(比例加微分控制) U s d K p 1 Td s ut K p t K pTd t s dt
3)当中频段斜率高于-40dB/dec,系统的稳 定性难以稳定
3、高频段
中频段以后( >10c)的区段 高频段的斜率越大,系统的抗干扰能力越 强
低频段表征了闭环系统 的稳定性 开环频率特性 态特性 中频段表征了系统的动 高频段表征了系统的复 杂程度
加入校正环节后,应使开环传递函数的BODE 图满足: 1) 低频段的增益充分大,以保证稳态误差 的要求 2) 中频段使对数幅频特性的斜率等于20dB/dec,并占据充分宽的频带,以保证 系统具有适当的相位裕量 3) 高频段的增益应尽快减小,以便使噪声 影响减到最小
系统快速性指标
4 )延迟时间 td 5) 最大超调量 MP% --系统平稳性指标
2
稳态性能指标
稳态误差 eSS ----系统准确性指标
二 频域性能指标
《相位滞后超前校正》PPT课件
自动控制原理
7.3 基于伯德图的滞后-超前校正
5.由最大相位超前m 确定参数 。
sinm 11
当 10时,有 m5.49。 因为这里需要
所以选择 10。
50的 相位裕量,
于是,相位滞后局部的另一转折频率
1为
T2
0.01弧 5 度 /秒 。
滞后-超前网络相位滞后局部的传递函数为
1 1 s 0.15
1 1 s
101166.66.77ss
0.015
自动控制原理
7.3 基于伯德图的滞后-超前校
正 6.确定滞后-超前网络相位超前局部的传递函数
-20 40
-40
校正后 0
校正网络
校正前
-20
-40
13dB
-20
-60 16dB
-40
校正网络 0
校正后
0.01 0.02 0.04
0.1
0.2
校正前
50 32
0.6 1 1.5 2
4 6 10
7.3 基于伯德图的滞后-超前Fra bibliotek正自动控制原理
因为希望校正后系统能够的幅值穿越频率为ω=1.5弧度/秒, 所以可以画出一条斜率为20dB/dec,且通过(1.5弧度/秒,13dB)点的直线.该直线与0分贝及-20dB线的交点就时所要求 的转折频率.于是,相位超前局部的转折频率分贝为0.7弧度/秒和 7弧度/秒.
kvlsi m 0sG c(s)s(s1k )(s2)k 210 k20
自动控制原理
7.3 基于伯德图的滞后-超前校正
2.当k=20时,画出未校正系统的伯德图如以下图所示:
未校正系统的相 位裕量是-32度, 增益裕量是-11分 贝。说明原系统 是不稳定的。
自动控制原理6 第一节超前校正

Gc (s)
1 Ts,
1 Ts
1
L() 20lg
1 (T)2
20lg 1 (T)2
() tg1T tg1T
m
1
T
频率特性的主要特点是:
所有频率下相频特
性为正值,且在频率
m处相频特性()存 在最大相位超前量m。
m发生在对数刻度的
坐标中1/T与1/( T )
的几何中点。
① 求m
令 d() 0,可得 d
20 lg 1 2T 2 20 lg 1 T 2
T 2
T 2
20 lg (1 ) 1
20 lg 10 lg
-90
1
m
1
T
T
19
三、基于伯德图的相位超前校正
R - Gc
C
G
图中,Gc为校正装置,G为 对象。
基于伯德图设计超前校正装置的步骤如下:
① 求出满足稳态性能指标的开环增益K值;
1
二、校正方式
按照校正装置在系统中的连接方式,控制系统校正方式可 分为串联校正、并联校正、前馈校正和复合校正四种。
⒈串联校正装置一般串联于系统前向通道之中系统误差检 测点之后和放大器之前。
R(s) E(s) Gc (s)
-
GP (s) C(s)
B(s)
H (s)
2
⒉并联校正装置接在系统局部反馈通道之中,并联校正也 称为反馈校正。
这里主要介绍基于伯德图的单输入-单输出的线性 定常控制系统的设计和校正的方法和步骤。
6
第一节 用频率法设计串联校 正器的基本概念
9
Im
-1
Re
K2
K1
10
第二节 相位超前校正
《相位滞后超前校正》课件
• Zhou, L. (2020). A Novel High-Precision Phase Lag Correction Method for Fiber Bragg Grating Sensors. IEEE Access, 8, 188757-188764.
结论
相位滞后超前是广泛出现于信号与参考信号之间的相位差,但其会对信号的稳定性、频率和控制精度造成影响。因 此,校正相位滞后超前是重要的技术应用之一,在通信、电力系统和图像处理等领域均有重要的应用价值。
Hale Waihona Puke 参考文献• Chang, C. C., & Huang, J. W. (2015). A novel high-precision digital automatic correction method for phase lag of piezoelectric actuator signal. Measurement, 65, 84-94.
相位滞后超前校正的应用
通信领域
相位滞后超前校正广泛应用于移动通信、卫星通讯和无线电领域,实现高速信号传输和无线 电频段管理。
图像处理
相位滞后超前校正可以纠正图像在采样和处理过程中产生的相位偏差,实现更加准确的图像 处理和传输。
电力系统
相位滞后超前校正可应用于电力系统的保护和控制,确保系统的可靠性和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
一、超前校正装置
超前校正又称为微分校正。超前校正装置既可由无源网络 组成,也可由运算放大器加入适当电路的有源网络组成。前者 称为无源超前网络,后者称为有源超前网络。
ui (t)
C
设 ui , uo 分别为网络的输入、输出 电压,则网络传递函数可写为
R1
R2
uo (t)
Gc(s)R1R2R2.
8
用频率法设计超前网络的步骤:
(1)根据稳态误差要求,确定开环增益K。
(2)根据已确定的开环增益K,绘制原系统的对数频率特性曲
线 L0(),0(),计算其稳定裕度 0 , Lg0 。 (3)确定校正后系统的截止频率 c 和网络的值。
① 若事先已对校正后系统的截止频率 c 提出要求,则可按要
求值选定 c 。然后在Bode图上查得原系统的L0(c)值。 取 m c ,使超前网络的对数幅频值 Lc(m() 正值)与 ② L0(c) (负值)之和为0,即令
1sinm 1sinm
当 m时,网络的对数幅值为
Lc(m)
10lg1
7
二、串联超前校正 超前网络进行串联校正的基本原理:利用超前网络的相角超前 特性。只要正确地将超前网络地转折频率1 T 和1 (T)选在待校
正系统截止频率的两旁,并适当选择参数和 T,就可以使已
校正系统的截止频率和相角裕度满足性能指标的要求,从而改 善闭环系统的动态性能。闭环系统的稳态性能要求可通过选择 已校正系统的开环增益来保证。
开环放大倍数要下降 倍,
这就导致稳态误差的增加, 可能满足不了对系统稳态性 能的要求。
3
为使系统在校正前后的开环放大倍数保持不变,需由提
高放大器的放大倍数来补偿。校正后网络放大倍数衰减 倍,
放大器的放大倍数就得增大 倍1 。
补偿后相当于在系统中串入
1
Gc
(s)
,即
1Gc(s)TTss11
补偿后的Bode图为
R1Cs1
R2 R1R2
R1Cs1
设
T
R1C及
R2 R1 R2
(1)
,则有
Gc(s)TTss11
2
超前网络的频率特性为
G c(j ) j j T T 1 1 1 1 2 2 T 2 T 22 (ar T c a ta rn cT t) an
其Bode图为
采用超前网络对系统作 串联校正时,校正后系统的
(2)原系统的截止频率c 3.16rad/,s相角裕度 0 17.6,
幅值裕度 Lg 。
0 17.6与题目要求的 45相差甚远。为了在不减小K值的
前提下,获得45º的相角裕度,必须在系统中串入超前校正网 络。
(3)确定校正后系统的截止频率 c 和网络的值。
m 0 4 1 5 .6 7 7 .6 3 5
L0(c)10lg10 进而求出超前网络的值。
9
② 若事先未提出对校正后系统截止频率 c 的要求,可从给出
的相角裕度 要求出发,通过以下的经验公式求得超前网络
的最大超前角 m ;
1sinm 1sinm
m0
给定的
校正前
5º~10º
:校正网络引入后截止频率右移(增大)而导致相角裕度减小的补偿量。
1 1 ssii n nm m1 1 ssii3 3 n n5 50.27
1l0g 1 1l0g 0.1 2 7 5.6dB
15
在原系统 L0() 曲线上查得幅值为-5.6dB时所对应的频率为 4.3rad/s,故选校正后系统的截止频率 c 4.3rad/,s 且有
mc 4.3rad/s
(4)确定校正网络的传递函数
稳态误差的要求
画出未补偿系统的Bode图,并求 0 , Lg0
m0
5~ 10
1sinm 1sinm
求未补偿系统幅值为 10lg1()处的频率,m c
初步确定超前补偿网络参数 ,T
T 1
m
Gc(s)
Ts1
Ts1
满足性能指标要求?
结束
N
Y
12
例:设控制系统如图所示。若要求系统在单位斜坡输入信号作 用时,
T 1 1 0.4s5
m 4.30.27
(取
1
1 T
2.2rad/s)
T 0 .2 0 7 .4 5 0 .1s2
(取2
1
T
8.3rad/)s
采用无源超前校正网络时,需考虑补偿校正损失:K 1 3.7
则校正网络的传递函数为 G c(s)T T s s110 0..1 4ss2 5 1 1
计算出值,然后在未校正系统的L0() 特性曲线上查出其幅值
等于 10lg1()所对应的频率,这就是校正后系统的截止频
率 c,且m c。
(4)确定校正网络的传递函数。根据所求得的 m 和两值,
求出时间常数为
T 1
m
m
1
T
10
即可写出校正网络的传递函数为
Gc(s)
Ts1
Ts1
(5)绘制校正网络和校正后系统的对数频率特性曲线。
① 稳态误差 ess 0.1,
② 相角裕度 45,
③ 幅值裕度 Lg 10dB,试设计串联无源超前网络。
R(s)
K
C(s)
s(s 1)
13
解:(1)因为系统为Ι型系统 KvK,essK 10.1 K10
取 K10,则待校
正系统的开环传递 函数为
G0(s)
10 s(s 1)
相应的Bode图为
14
前网络的相频特性表达式,即
()arc T t aan rc tT an
6
由
d() d
0 可求得最大超前角频率为
m
1
T
由于 1 1T,2 1(T ),故可表示为 m 12
网络的最大超前角正好出现在两个转折频率 1 和 2 的几何中 心,网络的最大超前角为
m ar1 2 c t an r1 1 c sin ( m )
(6)校验校正后系统是否满足给定指标的要求。若校验结果 证实系统校正后已全部满足性能指标的要求,则设计工作结束。 反之,若校验结果发现系统校正后仍不满足要求,则需重选一 次 和 m ,重c 新计算,直至完全满足给定的指标要求为止。
(7)根据超前网络的参数和 T之值,确定网络各电气元件的数值。11确定开环增益K
4
幅频特性表明:频率 在
1 T 至1 (T) 之间时,L()
的曲线的斜率为20,与纯微 分环节的对数幅频特性的斜 率完全相同,这意味着在
[1T~ 1(T)]斜率范围内对
输入信号有微分作用。
相频特性表明:在 0的所有频率下,均有()0,即网
络的输出信号在相位上总是超前于输入信号。
5
在转折频率 1 1T和21(T)之间存在着最大值 m ,根据超