基于线性CCD图像识别智能小车的设计与开发
基于线性CCD循迹的智能车系统设计
2
心距变化 率+ KA× 二 _, 其 中v为小车当前速度,
尺
参考文献
[ 1 】 邹淑彩 . 刷卡 式无人车在物料搬运 系统 中
的应用 … .航 空精密制造技术 , 2 0 1 4 . [ 2 ]郭佳 ,刘晓玉 ,昊冰 ,付 晓薇 .一种光 照
KI = 0 . 0 9 5 。 占空 比在 2 O % 的 情 况 下 , 智 能 车 能 以 2米 / 秒 的速 度 完 成 赛 道 。
移量转换成脉冲 或数 字量进 行输出,编码器 每 确的将 1 2 8个线性点 中间部分存在障碍物 的部
当赛道左 右边沿都 出现在线性 CC D采集 的图像中 ,即智能车行驶在直道上 ,直接通过 计算得到左右边沿 中间点作为赛道 中心线 。当 赛道左边 沿或右边 沿未能 出现在线性 CC D采 集的图像 中,即智能车处于弯道上 ,使用设置 好的赛道值分别对左、右边沿做加 、减运算得 到赛道中心线。当赛道左边沿和右边沿都未能
死。 确 定 要 给 的 转 角 公 式 为 G i v i n g a n g l e
=
减 速依赖于速度 闭环返 回的速度脉冲值的可靠 在 的少 数高电平置换成为低 电平,保证智能车 度和精确 度,因此为 了提高检测精 度选用精度 准确地扫 描到正确的图像。之后找出灰度值与
较 高的欧姆龙 5 0 0线光 电编码器。编码器安装
面 ,采用 s i m u l i n k 建模 ,这样 的仿真模 型可以
找到 P I D参数 K P、 K I 、 KD 的变 化 ,避 免 了 “ 黑
箱 ”调试参数的弊端 ,方便地 实现 、验证 和改 舵机控制采用 P D控制 ,增加 响应的快速 性及稳定 性,舵机 P WM 输 出占空 比= KP x偏 心距 + K Dx偏心距变化率 。通过对智能车系统 进行建模 ,将向心加速度的影响分量加入 ,最
基于线性CCD的智能小车控制系统设计

度 ;电路 板检测 并根 据 电位器判 断舵 机转 动角度 ,然 后控 制
舵机 转动到 目标角度或 保持在 目标角度 。 l - 4 速度测 量模块 。采 用欧姆 龙 编码器 ,其输 出轴 的齿
轮 同小车 的 电机齿 轮连在 一起 ,也就是 编码 器 的转速 同小 车
环境下较快 地行驶 。
1 . 5 电机驱动模 块 。采 用 MO S 管 双 电机 驱动 ,增 加总线 驱 动芯 片 7 4 L V C 2 4 5 ,提 高信号 驱动 能力 ,同时隔离 MO S 管 和 单 片机 ,保 护 单 片机 芯 片 ,防止 M O S 损 坏 后将 电池 电 压 直 接输入 到单 片机 ,进 而烧 坏单 片机 控制 引脚 。通 过单 片 机 输 出 的 四组 P WM控制 信 号 ,便 可 实现 对直 流 电动 机 的正 反
S YS P R A CTI CE
◆唐
摘 要 :系 ̄ v X MC9 S 1 2 XS 1 2 8 单 片机 为控 制核 心 ,通过 线性 CC D采集路 面信 息。利 用 固定 阈值 的 思想 以及 跟踪 引线的 黑线边缘提 取 法处理 图像 ,结合 非线性 的位置 式P D算 法、增量 式的P I D算法 实现 对方 向和速度 的控制 。经 实验验证 ,该 系统能够排 除干扰信 息 ,稳 定地 沿着黑 色引导线行驶 。 关 键词 :线 }  ̄ C C D;智能 车 ;单 片机 ;P I D 算 法
速 地行驶 ,成为软件 系统设 计的关键 。
{ I
『
n
单片机
U
电机驱动
n
f 舵机驱动
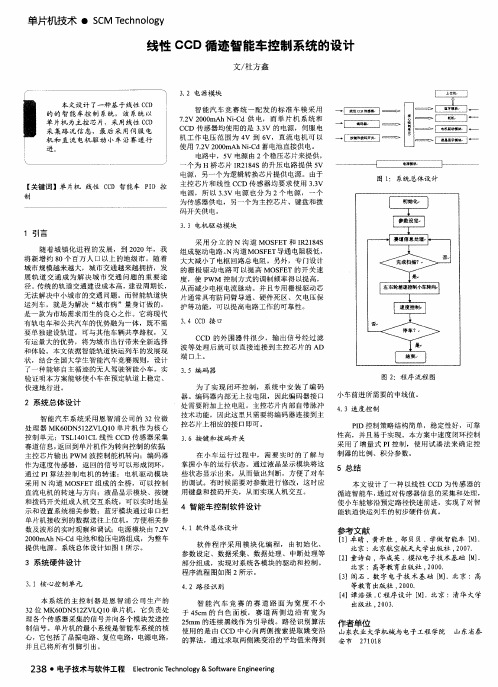
图1 硬 件 系 统 组 成
基于线性CCD的智能循迹小车设计
节点应用遥 内嵌支持 LIN 协议的增强型 SCI 模块及 SPI 模块袁4 通道 16 位计数器袁出色的低功耗特性袁带有中断唤醒功能的 I/O袁实现唤醒休眠 系统的功能曰拥有 8 通道 PWM袁易于实现电机控制遥 作为专业的汽车电 子控制芯片袁能够更加适应智能控制遥 2.2 线性 CCD 图像信息采集处理模块
咱责任编辑院庞修平暂
渊上接第 40 页冤表示所属袁如院廿剽劐卦 蒯匮蒯仨 剽匮劂劂剀匮刭仨赜匮刂劁.爸爸的朋友在 讲遥 第三格旧译予格袁基本用法是表示间接客体袁如院亓 剽匮劂劂剀匮刭仨赜匮刂仞 蒯匮蒯刂 赜劂刈. 我给爸爸讲述着所有的事遥 第四格旧译补格袁基本用法是直 接客体袁如院亓 剌仞匾剌仞 蒯匮蒯劐. 我爱爸爸遥 第五格旧译造格尧工具格袁基本 用法是表示工具尧方法袁也表被动句的行为主体遥 如院噩剡刳卦匮 亻刳劁匮刂劁劂伛 蒯匮蒯剜刿. 此书正被爸爸读着遥 第六格袁旧译前置格袁与 剜 等前置词连用袁 表言语思维的内容等义袁 如院亓 剽匮劂劂剀匮刭仨赜匮仞 匾剽匮劁劐 剜 蒯匮蒯刂. 我给弟弟 讲爸爸遥
SKP=1000;
KI=120;
KD=250;
}
else
//减速 PID 参数
{
SKP=800;
KI=100;
KD=200;
}
car_speed =25000+SKP*ek0+KI* (ek0-ek1) + KD * (ek0-2*ek1+
ek2);
if(car_speed > 25000)
car_speed=25000;
舵机主要用来控制单片机的 PWM 模块袁通过调节脉冲的宽度和 周期来控制舵机和电机的工作遥 通过输入占空比一定的脉冲袁内部电 机将转过一个固定的角度袁所以要让舵机转到某一个位置袁只需要改 变脉冲的占空比就可以实现舵机在一定角度内的任意转动遥 2.4 电机驱动和转速控制模块
基于图像识别的智能小车系统设计
第1章绪论1.1 课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2 国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段 20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。
基于图像处理的车型识别系统设计与实现

03
车型识别算法设计
算法流程设计
图像预处理
对输入的车辆图像进行去噪、增 强等预处理操作,以提高后续特 征提取和分类的准确性。
特征选择与提取
从预处理后的图像中选择和提取 能够有效表征车型的特征,如形 状、纹理、颜色等。
分类器设计与训练
基于提取的特征设计合适的分类 器,并使用大量样本数据进行训 练,以实现对不同车型的准确识 别。
要点二
图像特征提取方法
常见的图像特征提取方法包括颜色直方图、纹理分析、边 缘检测、角点检测等。其中,颜色直方图用于描述图像中 颜色的分布情况;纹理分析用于提取图像中的纹理特征; 边缘检测用于检测图像中的边缘信息;角点检测则用于提 取图像中的角点特征。这些方法可以单独使用,也可以组 合使用以提取更丰富的图像特征。
模块化设计
系统划分为图像预处理、特征提取、车型识别等模块,各模块之间 相互独立,便于开发和维护。
可扩展性
系统架构具有良好的可扩展性,可以方便地添加新的车型识别算法 或优化现有算法。
功能模块实现
图像预处理
对采集的图像进行去噪、增强、缩放等预处理操作,以提高后续 处理的准确性和效率。
特征提取
采用深度学习算法提取图像中的车型特征,包括车辆形状、纹理 、颜色等。
和准确率。
结合深度学 习技术
虽然本文所提出的车型识别系统已经具有较高的实时 性,但在一些对实时性要求更高的场景中,仍需要进 一步优化算法和提高计算效率。
THANKS
感谢观看
图像处理技术在车型识别中的应用
图像处理技术作为车型识别的重要手段,通过对车辆图像进行预处理、特征提 取和分类识别等步骤,能够实现对车辆类型的自动识别。
国内外研究现状
基于图像识别的智能小车系统设计-毕业论文

---文档均为word文档,下载后可直接编辑使用亦可打印---绪论1.1 课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2 国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段 20世纪50年代是智能车辆研究的初始阶段。
1954年美国BarrettElectronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。
基于CCD摄像头的智能车系统设计

基于CCD摄像头的智能车系统设计摘要随着电子技术与智能控制的发展,智能车的已经成为自动控制领域内的一个研究热点。
第一章绪论1.1研究背景1.1.1 智能车的发展历程智能车的发展是从自动导引车(Automatic Guided Vehicle,AGV)起步的。
AGV是指装有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护及各种移栽功能的运输车辆。
1913年,美国福特汽车公司首次将有轨导引的AGV代替输送机用到底盘装配上。
1953年,美国Barrett Electric公司制造了世界上第1台采用埋线电磁感应方式跟踪路径的自动导向车,也被称作“无人驾驶牵引车”。
20世纪60年代和70年代初,AGV仍采用这种导向方式。
在20世纪70年代和80年代初,AGV的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发。
随着电子和计算机技术的发展,视觉导航和激光导航成为了热门的研究方向。
由此出现了智能车的概念。
从1987年到1994年,在欧洲展开可“普罗米修斯” (Prometheus Program for the European traffic of highest efficiency and unprecedented safety)EUREKA项目。
该项目中颇具代表性的是戴姆勒——奔驰公司研制的VITAⅡ试验车,于1994年10月在巴黎附近的一条告诉公路上进行了车辆导航试验,在长达几千公里的普通三车道路段中采用了驾驶员辅助驾驶和车辆自主驾驶相结合的导航方法。
德国联邦大学(UBM),从20世纪80年代初期就开始了智能车辆自主导航研究,其合作伙伴是德国戴姆勒—奔驰汽车公司。
其中最具代表性的是一辆由豪华型本车500SEL改装成的VaSoRs-P试验车。
VaSoRs-P 试验车在高速公路和普通公路上进行了大量的试验,试验内容包括跟踪车道线,躲避障碍以及自动超车等。
基于线性CCD传感器检测的智能车控制系统
前言随着现代社会的高速发展,无论在生活应用还是在工业应用中,智能化的概念越来越多的出现在我们的身边。
尤其是自上世纪80年代以来,汽车技术以突飞猛进的速度在发展,汽车从原来的纯机械结构构成的代步工具逐渐演变成一个集各种高科技技术为一体的智能化的新时代产物。
因此,智能车的概念也就越来越凸显出来,智能汽车,顾名思义,就是在现代网络技术支撑下,利用电子信息通信技术,智能微控制器,环境监测控制技术,GPS导航技术等等组成的一个新意义的高新技术复合载体。
它能够实现自动的环境监测,规划处理,自动行驶还有人工辅助驾驶等功能。
现在汽车行业对智能汽车的研究主要在提高汽车的安全性和汽车的驾驶辅助上,在汽车自动驾驶方面的发展还没有质的飞跃,近年对于车辆自动驾驶,智能导航的研发正大力进行。
智能车辆的研究成果现在已经体现着一个研究团体乃至整个国家科研实力水平。
所以无论是中国还是国外很多国家已经把智能汽车确定为重点发展的项目。
21 智能车控制系统概况1.1 系统开发背景智能化,是现今社会前进的一个目标。
对于汽车来说智能化也会是未来发展的方向。
对于国家来说,大学生质量的好坏是这个国家的发展动力的重要指标之一。
大力发展国内大学生的科技实践能力一直是我国的一大政策。
其中为促进大学生的科研创新能力,一直在举办着各种各样的科技竞赛。
智能汽车方面,在中国的各种智能车机械车等的竞赛有很多,其中飞思卡尔杯全国大学生智能汽车竞赛在中国已经举办了九届。
这项赛事主要探索的就是智能汽车,用智能汽车模型作为研究对象,让学生们充分发挥学校中所学习科学文化知识,对智能小车加以设计并改装,完成一个能自动识别比赛赛道路况并能够进行判断并进行相应控制的小车。
最终完成大赛的比赛要求。
这项大赛其中包括了智能控制、环境监测、传感器技术等主要学科知识,还涉及到电子、电气、计算机、机械等多个基础学科。
赛事用比赛的方式,大大提高了大学生参与者的积极性,锻炼了大学生的实际操作能力。
基于CCD传感器的智能小车控制系统设计
基于CCD传感器的智能小车控制系统设计CCD传感器是一种现代高性能传感器,它可以用于各种应用领域,例如监视和控制系统,因为它可以提供精确和可靠的测量结果。
本文将探讨一种基于CCD传感器的智能小车控制系统设计。
一、系统概述本设计的智能小车控制系统使用CCD传感器来监视其周围环境,并根据测量结果实现自主导航功能。
该传感器可以检测到物体的位置和距离,通过对这些数据进行处理和分析,小车可以自动避免碰撞,停止或转向。
此外,该系统还具有基于无线通信的远程监控功能,可以实现远程控制和数据传输。
二、系统组成该系统由以下几部分组成:1. CCD传感器阵列CCD传感器阵列是该系统的核心组件,它通常由数百个小型传感器组成。
每个传感器都可以以不同的速率和精度进行测量,这使得该系统可以提供高质量的传感性能和准确的测量结果。
2. 控制板控制板是系统的处理单元,负责接收和处理CCD传感器所收集的数据。
该板还包含一些接口和控制器,以便于用户进行控制和调整。
3. 电机控制模块电机控制模块是该系统的动力源,负责控制小车的运动。
该模块通常由高性能电机和控制器组成,控制器可以根据用户输入的指令来控制电机的旋转速度和方向,以实现高效的小车运动。
4. 通信模块通信模块可以通过无线或有线方式与控制板进行数据传输和通信。
该模块可以与其他设备或系统进行数据交流,并实现远程控制和监控功能。
三、工作原理1. CCD传感器监测当小车移动时,CCD传感器将实时监测周围环境中的物体。
当发现障碍物时,系统将根据测量数据自动调整小车的方向,避免碰撞。
2. 控制板处理控制板会接收CCD传感器所收集的数据,并根据处理算法进行分析和处理。
通过对数据进行比较和计算,系统可以推断小车应该采取哪些行动,例如停止、转向或避让障碍物。
3. 电机控制模块运动一旦系统根据测量数据和算法决定了小车需要采取的行动,控制板会发出指令,通知电机控制模块控制电机的运动方向和速度,通过自动调整电机的旋转速度和方向来控制小车的运动。
基于线性CCD检测的寻线智能车设计与实现
基于线性CCD检测的寻线智能车设计与实现余世干,张廉洁,张旭东,戎强强(阜阳师范学院信息工程学院,安徽阜阳 236041)摘要:本设计以全国大学生智能车竞赛为背景,为了实现小车的自动循迹功能,提出了一种道路识别和最优的路线计算算法引导小车循迹行驶的方案.本文介绍了这一方案的基本思想,阐述了采集的原理,并根据这一原理对图像进行处理和路线的最优计算,最终实现了小车的自动循线的功能.关键词:智能车;阈值;灰度值;滤波TP23:A:1673-260X(2015)10-0065-031 引言自动循迹的智能车相当于移动的智能机器人,现在主要应用于餐厅餐盘的接送、仓库以及其他需要搬运设备的工作中,而线性CCD相当于智能机器人眼睛,小车通过传感器获取路径信息,并按一定的精度要求正确沿路径行驶.2 系统整体结构设计本设计中,要求智能汽车模型在规定45cm宽度的白色KT板,两边均为2cm黑色引导线的跑道上自动行驶,并可根据变化的形状,按行驶要求自主导航.这就要求智能车车具备较强的自适应能力.智能车在行驶的过程中还需要快速和稳定性的要求,因此,设计方案必须考虑传感器信号采集处理,陀螺仪和加速度计的调整,和电机差速控制策略的设计等因素.整个系统包括图像信息采集和处理,智能车的直立控制,电机差速的转向控制和速度的反馈,系统组成结构如图1所示,系统组成实物如图2所示.2 图像处理方案设计2.1 图像信息处理对跑道形状的识别正确与否决定了智能车车能否实现自动循迹功能.虽然当今图像处理算法已经有很多成熟的算法和应用,但如何有效地采用符合具体实际使用的算法则需要经过实际测试才能确认,图像处理包括对线性CCD信息采集,跑道状况的提取,路径的计算等.一般的设计流程包括图像信息采集,图像信息的处理,跑道信息的计算和行驶路线的优化这4个部分.图像信息采集时,单片机的端口与CCD的图像灰度信息输出引脚相连,线性CCD是单行采集图像的,并且采集回来的数据是灰度值,我们需要对灰度值进行二值化和滤波处理,最终确定跑道的路况情况.2.2 阈值提取方法在智能小车中常用的阈值提取方法有固定阈值法;取平均电压值作阈值与计算max与min的均值作阈值,通过对比分析得出本系统采用大津算法求阈值法.2.2.1 固定阈值主要思想在黑白电压值较稳定,浮动范围很小的情况下,如白色路面的电压始终在170上下极小的范围内浮动,黑色路面电压在50左右稳定,此时阈值可选范围很大,随机取一个100或120都是没问题的.但很多CCD存在畸变,视野两侧的电压始终很低,而且有时考虑到CCD视角的变化(如更改前瞻,焦距),图像的波动可能也会较大,用以下两种方法可能更实用.2.2.2 取平均电压值作阈值法计算出128个像素点电压的平均值,取此值作为图像二值化的阈值,可以增强环境的适应性,由于实际的黑白电压的门限不断变化且有一定的波动,或者外界光线亮暗略有不均,此方法依然能够适用.2.2.3 计算max与min的均值作阈值法需要对128个像素点做排序,取出电压最大与最小的两个像素点的电压值,取二者的平均值作阈值,通过实践测试,这种方法具有一定的效果,但是考虑到比赛赛场上的光线过强,加上CCD畸变的影响,即使加上偏振片,得到的图像可能仍不理想.2.2.4 大津算法求阈值由于比赛场馆的光线分布式不均匀的,如果采用固定的阈值会影响图像处理的效果,所以采用了大津算法动态求阈值.大津算法(OTSU)是一种确定图像二值化分割阈值的重要算法,这是由日本学者大津于1979年提出,从大津的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最大.原理:对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1.图像的总平均灰度记为μ,类间方差记为g.假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T 的像素个数记作N1,则有:采用遍历的方法得到使类间方差g最大的阈值T,即为所求.大津算法的形象理解:对于直方图有两个峰值的图像,大津法求得的T近似等于两个峰值之间的低谷.图3为图像的直方图,使大津法求得的T=0.5294,转换在[0,255]之间为134.9970,只好是两个峰值之间低谷的位置.2.3 系统图像处理过程图像处理的滤波算法较多,主要分为平均值滤波,中值滤波,限值滤波,滑动平均值滤波等.考虑到其他的滤波运算量大,需要占用大量内存,故采用了中值滤波和滑动平均值滤波相结合的算法.中值滤波的优点是能够有效克服因偶然因素引起的波动干扰,滑动平均滤波的优点是对周期性干扰有良好的抑制作用.在实际处理中,每次取一行中3个相邻列的灰度值,先判断这3个值是否有相同的灰度值,若灰度值相同则采用滑动平均值滤波,取平均值,并将第二个值修改为该平均值;若灰度值不同则采用中值滤波,并对这3个值进行排序,将第二个值修改为3个数值的中间值.该算法对一个像素点的过滤仪用到r相邻两个像素点的灰度值,计算量不大,占用内存不多,适合单片机的计算,且该算法相对来说较简单,时间复杂度不高,满足了小车对快速控制系统的要求.滤波前后图像对比如图4所示.2.4 跑道轨迹提取在滤波后的图像中,白色为小车的行驶范围,黑线为小车需要行驶的轨迹,因此,轨迹线的提取即为黑线,所以采用跟踪引线的黑线提取算法.假设某时刻找到某行的黑线中心位置m,则下一时刻在下一行的m附近搜寻黑线的左右边缘,然后计算该行的中心位置.该方法的特点是始终在前一行的引线中心位置附近寻找下一行的引线位置,故称为“跟踪”引线的黑线提取算法.该算法的优点是在首行引线检测正确的前提下具有较强的抗干扰性,能更有效地消除十字垂直交叉黑色引线的干扰以及引线外黑色噪点的影响,始终跟踪目标引导线.在试验过程中,发现该算法有一定的不足.由于是在连续邻域上跟踪引导线,因此,若第一行引线的检测位置和实际导引线偏差较大,将产生一连串的错误,甚至造成小车失稳.为防止这种现象的发生,可利用前面两行的引线中心位置来确定下一行的黑线位置.因为前两行同时出错的概率远远小于一行出错的概率,所以采用这种方法造成丢失引线的几率会大大减小.此外,针对每行中的孤立噪点,采用计数法排除.如果连续黑点数小于某个阈值时,认为是噪声影响,而非实际的黑线,从而可以减少误判概率.2.5 轨迹曲率处理对于道路形状的判断,可以采用曲率法.找到每行黑线的中心位置后,再进行道路曲率信息的计算,即可得出道路的类型.简单的曲率计算公式如下所示:q=I(X3-X2)-(X2-X1)I式中:x1,x2和x3为3个实际距离相等的行的黑线位置.行驶路径类型可以分为直道、曲率小的s弯、曲率大的S弯和普通弯道4类.u型弯道和0型弯道可以认为是多个同方向普通弯道连接在一起,因此,都可以被认为是普通弯道.若计算出来的曲率q接近0,则说明该段道路为直道或者小S弯;若曲率q比较大,则说明该段道路为普通弯道;若计算出来的曲率q非常大,则说明该段弯道为大S弯.在计算得到各段道路的具体类型之后,就可以进行小车行驶路径的优化.通常情况下,直道和小s弯道按照直线行驶通过;对于普通弯道,一般将小车行驶路线的曲率比道路弯曲程度大一点,尽量以微内圈的线路通过;对于大S弯道,需要将小车的行驶路线曲率比道路弯曲程度小一点,在不跑出道路的情况下尽量少走弯路,这样小车看到的弯道类型始终是大s弯道,即可以连续地走“小弯”路线通过,这样既节约时间,且行驶速度不会因为拐弯太大而过于减小,并保持匀速行驶.优化前后路径如图5所示,虚线代表实际道路形状,带箭头的实线代表优化后的路径形状.3 结束语采用线性CCD检测的循迹智能车系统的设计涵盖了多个学科交叉知识,利用K60芯片作为核心控制器,CCD作为路线探测器,本文针对智能车系统的具体实际的图像处理方案设计过程,具体包括图像信息处理,阈值提取方法,系统图像处理过程跑道轨迹提取,轨迹曲率处理等过程.经过实际检测,按照本文所设计的智能汽车模型能够在规定的直行、S型、十字交叉路口、斜坡、直角弯等赛道上自助导航行使,速度能达到2m/s的速度,满足实际需求.另外基于本文所研究思想,可以在其他自动控制领域发挥作用,这也是文章的另外一个目的.参考文献:〔1〕卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北航出版社,2007.〔2〕赵春燕,郑永果,王向葵.基于直方图的图像模糊增强算法[J].计算机工程,2005.〔3〕李忠海.图像直方图局部极值算法及其在边界检测中的应用[J].吉林大学学报,2003.〔4〕冈菩萨雷.数字图像处理[M].北京:电子工业出版社,2002.〔5〕吴怀宇.大学生智能汽车设计基础与实践[M].北京:电子工业出版社,2008.-全文完-。
基于CCD的智能车制作与调试系统设计
基于CCD的智能车制作与调试系统设计摘要:以“飞思卡尔杯”全国大学生智能汽车比赛为背景,基于S12微处理器设计了一个能自主识别规定路径的智能车。
通过软硬件的改进使智能车速度及稳定性有了较大的提高,并遵守大赛的各项规则。
1)采用新型16位“飞思卡尔”单片机MC9S12XS12,处理速度更快,性能更稳定;增强型捕捉定时器(ECT)模块提高了摄像头采集效果及系统的可靠性。
2)采用速度介入算法对舵机进行控制,克服了去年“弦切法”的不足,使得智能车行驶更稳定、快速。
3)采用BB_control控制算法提高了电机的响应速度,能满足小车在较高速度下的快速响应要求。
4)基于SD卡设计了智能车调试系统,能够对智能车行驶过程中的路径图像进行存储,并能通过上位机进行路径信息分析,方便了智能车调试。
通过对智能车设计方法的改进,在稳定性及快速性上有了很大提高,设计的SD卡调试系统有较好的应用价值。
关键词:CCD摄像头;智能车;SPI;MC9S12XS128;LM1881Abstract:This design with "freescale cup" national University Smart Car Competition as the background, S12 smart car microprocessor design provides a path to self-identify the smart car last year. Smart cars to be able to finish the course in the shortest time, and to comply with the rules of competition.1) Using the new 16, "freescale" SCM MC9S12XS12, processing speed faster, more stable performance. Enhanced capture timer (ECT) module improves the effect of camera acquisition and reliability of system.2) Intervention by the speed servo control algorithm to overcome last year's "tangential law" insufficient to make intelligent vehicles driving more stable and fast.3) Use BB_control control algorithm to improve the response of motor speed to meet the car at high speeds, rapid response requirements.4) SD card based on the design of intelligent vehicle system debugging, intelligent vehicles can travel the path of the process of image storage, and the path through the host computer information analysis, to facilitate debugging of smart cars.Based on the improvements of smart car design, the system have great increases both in stability and rapid. And the design of the SD card debug system has good application value.Keywords:CCD camera; Smart Car; SPI; MC9S12XS128; LM18811引言1.1设计背景本设计本文以“飞思卡尔”杯全国大学生智能汽车比赛为背景,制作一个在专门设计的跑道上能自主识别道路行驶的智能车,能在最短的时间里跑完跑道,且不脱离轨道。
线性CCD循迹智能车控制系统的设计
4 智能车控制 软件设计
4.1软 件 总体 设 计
软件 程序 采 用模 块化 编 程, 由初 始化 、 参数设定、数据采集 、数 据处理、中断处理等 部分组成 ,实现对 系统各模块的驱动和控制 。 程 序 流 程 图如 图 2所 示 。
4.2 路 径 识 别
智 能 汽 车 竞 赛 的 赛 道 路 面 为 宽度 不 小 于 45cm 的 白色 面 板 ,赛道 两侧 边 沿 有 宽 为 25mm 的连续黑线 作为引导线 。路径识别 算法 使用 的是 由 CCD 中心向两侧 搜索提 取跳变 沿 的算法 ,通 过求 取两侧跳变沿 的平均值来得 到
单 片机 技术 · SCM Technology
线性 CCD循迹智 能车控 制系统的设计
文 /杜 方 鑫
3.2 电 源模 块
本 文设 计 了 一种 基 于 线 性 CCD
的 的 智 能 车 控 制 系统 , 该 系 统 以
单 片机 为主控 芯片,采用线性 CCD
采集路 况 信 息,最后 采用伺 服 电
小 车 前进 所 需 要 的 中 线 值 。
4.3速 度 控 制
PID 控 制 策 略 结 构 简 单 ,稳 定 性 好 , 可 靠 性 高 , 并 且 易 于 实 现 。本 方 案 中 速 度 闭环 控 制 采 用 了 增 量 式 PI控 制 , 使 用 试 凑 法 来 确 定 控 制 器 的 比例 、 积 分 参 数 。
5 总 结
本文 设计 了一 种 以线 性 CCD为 传感器 的 循迹智能车 ,通过对传感器信息 的采集和 处理 ,
和拨码 开关组成人机交互系 统,可以实时地显 示和 设置系统相关参数 ;蓝 牙模 块通过 串口把 单 片 机 接 收 到 的数 据 送 往 上 位机 , 方 便 相 关 参 数及 波 形 的 实 时 观 察 和 调 试 ; 电源 模块 由 7.2V 2000mAh Ni—Cd电池和稳压 电路组成 ,为整车 提 供 电 源 。 系 统 总 体 设 计 如 图 1所 示 。
基于CCD传感器的智能车系统设计与研究

基于CCD传感器的智能车系统设计与研究随着科技的不断发展,智能车系统已经成为现实。
其中,CCD传感器在智能车系统中起着至关重要的作用。
本文将探讨基于CCD传感器的智能车系统的设计与研究。
智能车系统是一种集成了多种科技的车辆系统,旨在提高驾驶的安全性和舒适性。
其中,CCD传感器是智能车系统中用于获取环境信息的重要组成部分。
CCD传感器具有高精度、高分辨率和低噪声等优点,可以有效地获取车辆周围的环境信息,并将其传输给智能车系统的其他部分进行处理。
在基于CCD传感器的智能车系统中,首先需要设计一个高性能的CCD图像采集系统。
该系统应该具备高速的图像采集能力,能够实时获取传感器传输的图像信息。
同时,还需要设计一个高效的图像处理算法,对CCD传感器采集到的图像数据进行处理,提取有用的信息,并进行适当的分类与识别。
另外,为了提高图像识别的准确性,应该结合机器学习与深度学习等技术,建立一个完善的图像识别模型。
在智能车系统中,CCD传感器还可以与其他传感器进行融合,以获取更全面的环境信息。
例如,可以与雷达传感器进行融合,实现对车辆周围物体的距离和速度的测量。
同时,还可以与激光传感器进行融合,实现对车辆周围物体的精确测量。
通过多传感器的融合,可以提高智能车系统对环境的感知能力,从而更好地判断驾驶环境,并做出相应的驾驶决策。
此外,在基于CCD传感器的智能车系统中,安全性是一个重要的考虑因素。
为了保障驾驶的安全性,智能车系统需要具备一定的自动驾驶功能。
通过分析CCD传感器采集到的图像信息,智能车系统可以实现车道偏移警告、交通信号灯识别、行人识别等功能,帮助驾驶员更好地掌握驾驶环境,并做出正确的驾驶决策。
综上所述,基于CCD传感器的智能车系统设计与研究是一个复杂而又重要的课题。
通过设计高性能的CCD图像采集系统和高效的图像处理算法,结合其他传感器的融合与机器学习技术的应用,可以实现对车辆周围环境的准确感知,提高智能车系统的安全性和驾驶舒适性。
基于TSL1401线性CCD的智能巡线小车
t u b e 。 t h e s ma l l i n t e l l i g e n t p a t r o l l i n e v e h i c l e h a s t h e a d v a n t a g e s o f l o n g , j i t t e r a n d s m a l l , r e l a t i v e l y f a s t s p e e d e t c .
赵 万欣 陈 思 屹
( 西南科技大学信 息工程学・ 院, 四川 绵阳 6 2 1 0 0 0 )
摘 要
为 了使 小 车能 在 白底 道 路 上 沿着 中间 黑 线 以较 快 的 速 度 自主 行 进 ,采 用 了一 种 基 于 T S L 1 4 0 1 线 性 CC D 的 新 型 图像
速度相对较快等优 点。
关键词 : 线性 C C D, 巡 线 小车 , T S L 1 4 0 1 , 传感 器
Ab s t r ac t I n or d er t o m a k e t h e c ar ca n be i n wh i t e o n t h e r oa d al on g t h e c en t er l i n e a t a f as t s pee d i n dep en de n t t r a v el , a n e w
r e al i z e a u t o n omou s pa t r ol l i n e. T hr ou gh t he c ar s pe ed an d s t a bi l i t y t e s t s ho w t h a t i t i s be t t e r t h an i n f r ar ed t u be a n d l a s e r
基于线阵CCD的智能小车路径识别系统
2
硬件模块设计
摄像头的主要工作原理是 : 按一定的分辨率,
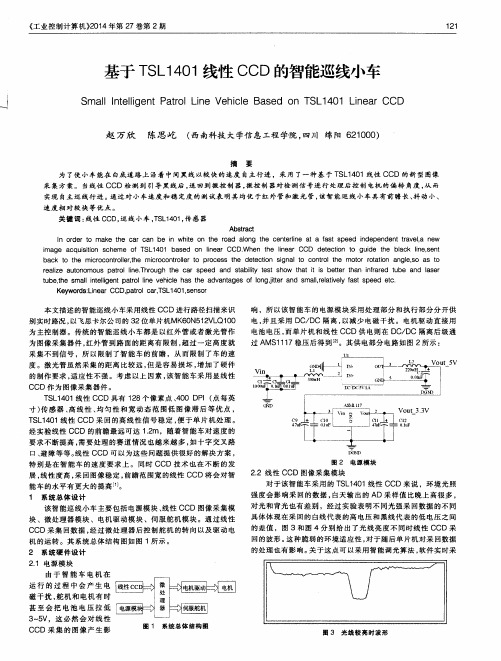
以隔行扫描的方式采样图像上的点, 当扫描到某 点时 , 就通过图像传感芯片将该点处图像的灰度 转换成与灰度成一一对应关系的电压值 , 然后将 此电压值通过视频信号输出。当摄像头扫描完一 行, 视频信号端的输出有一个电压 凹槽 , 并保持 一段时间 , 此 凹槽 叫做行同步脉冲, 它是扫描换 行的标志。跳过一行后, 开始扫描新的一行, 如此 下去 , 直到扫描完该场的视频信号 , 接着就会出现 一段场消隐区。在这若干个消隐脉冲中 , 有个脉 冲远宽于其他的消隐脉冲 , 该消隐脉冲即称为场 同步脉冲 , 它是扫描换场的标志。 如图 1 所示。摄像头每秒扫描 25 幅图像 , 每 幅又分奇、 偶 2 场, 先奇场后偶场, 故每秒扫描 50 场图像, 即扫描周期为 20 ms[ 3] 。
第 32 卷 第 9 期 2009 年 9 月
合肥工业大学学报( 自然科学版) JO U RN AL O F H EFEI U N IV ERSIT Y OF T ECH N OL O GY
Vol. 32 No . 9 Sept. 2009
基于线阵 CCD 的智能小车路径识别系统
温阳东,
摘
王祥好
230009)
[ 4]
。
所采用的摄像头是 F QY888A 系列的 208B 黑白型款, 供电电压是 6 V, 分辨率为 350 线。输 出制式是标准视频信号 ( PAL / NT SC ) 。它能够 利用 S12 单片机内部硬件资源有效地设计路径参 数检测方法。利用 S12 内部的 AD 转换器, 配合 从视频信号中分离出的同步信号, 直接将图像信 号采集到单片机内部 RAM 中 , 然后通过软件对 图像信息进行处理, 得到路径各种参数。
线性CCD智能车自主导航系统设计
线性CCD智能车自主导航系统设计本设计是一种基于线性CCD检测的智能车自主导航系统,采用蓝宙电子公司的MK60DN5127VIQ108N300单片机为控制核心,主要由电源模块、电机驱动模块、线性CCD、舵机以及反馈控制模块构成,实验表明,智能小车能很好地识别赛道信息,并能很快地作出判断,实现了自主转弯、过障碍等功能。
标签:智能汽车;自主导航;单片机;自主转弯;过障碍设计智能车所涉及的学科有机械设计、电子技术基础、数字信号处理、传感器技术、电路设计、C语言程序设计、单片机、自动控制原理等,因此智能小车是一个综合了很多学科的制作。
该设计包括硬件和软件两大方面,其中采集信号的模块是线性CCD,MK60DN5127VIQ108N300单片机对线性CCD采集的信号进行接收和处理,其中小车自主导航的依据就是单片机处理过的信号,从而能很好的控制小车转弯、前进、停止、加速、避障等,可以使智能车在赛道上进行自主寻迹。
1 方案论证1.1 为了降低小车在行驶过程中产生的震动以及震动对线性CCD的影响,经过查阅质料以及亲自的实践发现加固C车模底盘使它成为刚体的方法可以有效减少震动。
1.2 小车重心的确定,由于小车在转弯过障碍的时候容易发生侧翻。
为了防止小车侧翻把重心固定在底盘靠近车尾的地方,这样就可以增加小车的可控性。
1.3 测试小车的赛道比较光滑,小车在直的长赛道上加速行驶,突然遇到急转时弯易冲出赛道,为了防止小车冲出赛道可以打磨车轮胎,但是要注意力度,打磨过度轮胎就坏掉了,所以必须适当打磨,这种方法可以提高小车的灵敏度,同时能更好的驱动智能车加速。
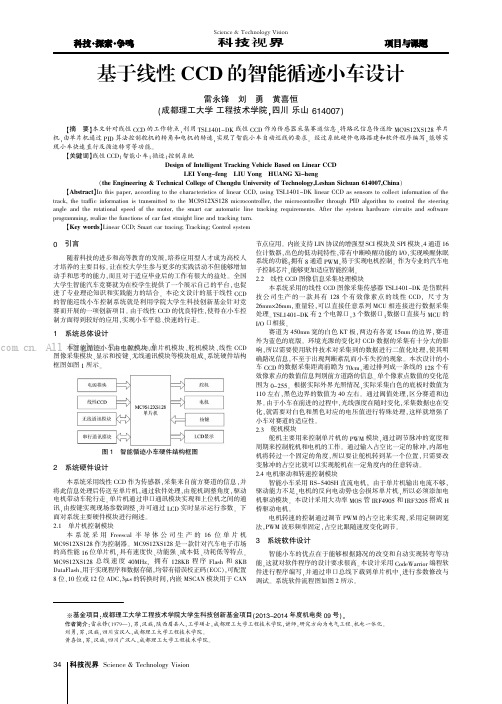
1.4 电机驱动模块作为智能车设计最为重要的一环,需要特别可靠的方案来确保万无一失。
所以我们使用BTN7971芯片作为驱动芯片。
该芯片的稳定性高,对环境适应能力强且具有一定的抗干扰和自我保护能力,而且它还能提供良好的加速性能以及具备超强的散热能力,是作为电机驱动模块芯片的不二之选[2]。
基于线性CCD的飞思卡尔智能车设计
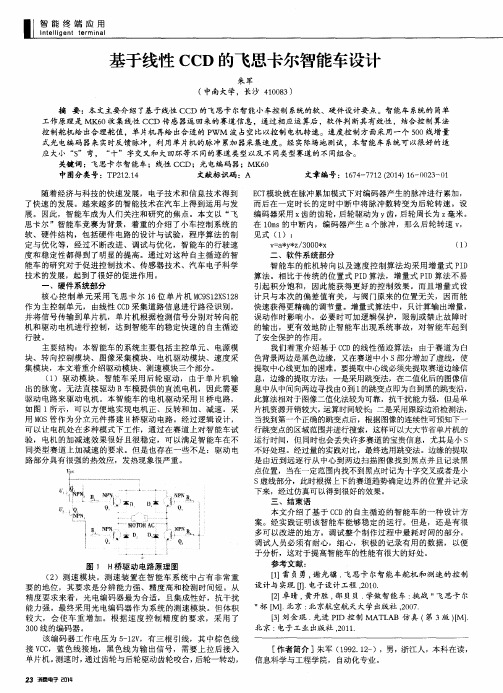
E C T 模块就在脉冲累加模 式下对编码器产生的脉冲进行 累加 , 而后在一 定时长 的定 时中断中将脉冲数转变 为后轮转速 。设 编码器采用 X 齿的齿轮 , 后轮驱动为 y 齿, 后轮周长 为 Z 毫米 。 在 1 0 m s的中断 内,编码器产生 a个脉冲 ,那么后轮转速 v , 见式 ( 1 ):
v = a : l = y 术 z / 3 O O 0 : l = x ( 1 )
、
图1 H桥驱动电路原理 图 ( 2 )测速模 块。测速 装置在 智能车 系统 中 占有 非常重 要 的地位 ,其要求 是分辨能力强 、精度 高和 检测 时间短 。从 精度要求来看 ,光 电编码器最 为合适 ,且集成性好 ,抗干 扰 能力强。最终采用 光电编码器作为系统 的测 速模块 。但体积 较大 ,会使 车重 增加 。根据 速 度控 制精 度 的要 求,采 用 了
3 0 0线 的编 码 器 。
二、软件 系统部分 智能车 的舵 机转 向以及速度控 制算法均采 用增量 式 P I D 算法。相 比于传 统的位置式 P I D算法 ,增 量式 P I D算法不 易 引起 积分饱和, 因此 能获得更好的控制 效果 。而且增量式 设 计只与本次 的偏差值 有关,与 阀门原来 的位 置无关 ,因而 能 快速 获得更精确 的调节量 。增量式算法中,只计算输 出增量 , 误动作时影 响小 ,必 要时可加逻辑保 护,限制或禁止 故障时 的输 出,更有效地 防止智能车 出现 系统 事故 ,对智能 车起 到 了安全保护 的作用 。 我们着 重介绍基于 C C D的线性循迹 算法: 由于赛 道为 白 色背景两边是黑色边缘 ,又在赛道 中小 S部分增加 了虚线 ,使 提取 中心线更加的 困难 。要提取中心线必须先提取赛道边缘信 息,边缘的提取方法:一是采用跳变法 ,在二值化后的图像信 息中从 中间向两边寻找 由0 到1 的跳变点即为 白到黑的跳变沿, 此算法相对于图像二值化法较为可靠 ,抗干扰能力强,但是单 片机 资源开销较大 , 运算 时间较长;二是采用跟踪边沿检测法, 当找到第一个正确 的跳变点后 ,根据 图像的连续性可预知下一 行跳变点的区域范 围并进行搜索,这样可以大大节省单片机 的 运行时间,但 同时也会 丢失许多赛道的宝贵信息 ,尤其是小 S 不好处理 。经过量 的实践对 比,最终选用跳变法 。边缘的提取 是 由近 到 远 逐 行 从 中 心 到 两 边 扫 描 图 像 找 到 黑 点 并 且 记 录 黑 点位 置,当在一定范围内找不到黑点时记为十字交叉或者是小 S 虚线部分,此时根据上下的赛道趋势确定边界的位 置并记录 下来,经过仿真可以得到很好 的效果。 三 、结 束 语 本 文 介 绍 了基 于 C C D的 自主循 迹 的 智 能 车 的 一 种 设 计 方 案 。经 实践证明该智 能车 能够稳定 的运行 。但是,还是有很 多可 以改进 的地方 。调试整 个制作过程 中最耗 时间的部分 。 调试人 员必须有耐心 ,细 心,积极 的记录有 用的数据 ,以便 于分析 ,这对于提高智能车的性能有很大的好 处。 参考文献: 【 1 】 雷 贞勇 , 谢光骥 . 飞思卡 尔智 能车舵 机和 测速的控制 设 计 与 实现 m. 电子 设 计 工 程 , 2 0 1 0 . [ 2 】 卓晴 , 黄开胜 , 邵贝贝 . 学做 智能车 : 挑战 ” 飞思卡 尔 ” 杯 f M1 . 北京 : 北京航 空航天大学 出版社 , 2 0 0 7 . f 3 1 刘金琨 . 先进 P I D 控制 MAT L A B仿真 (用
基于CCD摄像头智能循迹小车的研究与开发

基于CCD摄像头智能循迹小车的研究与开发冯谣【摘要】In this paper,in order to realize the tracking of the intelligent track car on the designated track,the hardware design,circuit design and control algorithm in the course of the design and development of the track car are de-scribed in detail in this paper.The vehicle obtains the current road condition by analyzing and processing the image infor-mation collected by the CCD camera,controls the traveling direction through the steering gear,and controls the driving of the track car through a closed-loop incremental PID control method.The experimental results show that the intelligent tracking car can achieve better tracking function in actual operation,performs well under different lighting conditions,and has strong anti-interference ability and stable operation.%为实现智能循迹小车在指定赛道上的循迹行驶,详细阐述了循迹车设计开发过程中的硬件设计,电路设计以及控制算法的研究.循迹车通过分析处理CCD摄像头采集到的图像信息获得当前道路情况,舵机进行行进方向的控制,闭环增量式PID控制方法进行驱动控制.结果表明,智能循迹小车在实际运行过程中能够较好的实现循迹功能,在不同的光照条件下,整车抗干扰能力较强,运行情况较为稳定.【期刊名称】《浙江交通职业技术学院学报》【年(卷),期】2018(019)001【总页数】5页(P16-20)【关键词】智能车;自动循迹;摄像头【作者】冯谣【作者单位】浙江交通职业技术学院,杭州311112【正文语种】中文【中图分类】U463.60 引言以“恩智浦杯”全国大学生智能车比赛为背景,以设计开发一辆基于CCD摄像头的智能循迹小车为目标,介绍了智能循迹小车在研究开发过程中的硬件设计与算法实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于线性CCD图像识别智能小车的设计与开发
目前,具有自动驾驶功能的智能车越来越引起人们的重视。
智能车装备了各种传感器来采集路况信息,通过计算机的控制可以实现自适应巡航,并且又快又稳、安全可靠。
智能车不仅能在危险、有毒、有害的环境里工作,而且能通过计算机的控制实现安全驾驶,能大幅度降低车祸的发生率。
智能车的设计关键是路况信息的采集,传统的方案多采用红外光电传感器,此方案不仅噪声较大,而且与主控CPU的连接电路复杂,传输速率慢。
本文研究的智能小车系统选用了TSL1401CL线性CCD图像采集模块,该模块采用串行通信方式与主控CPU连接,不仅电路简单、性能稳定,而且采集速率快。
通过实验测试,本文设计的智能车能根据采集到的图像分析前方路径及障碍而实现智能驾驶,具有极强的实用价值和市场前景。
1 系统设计思想
经过调研与分析,我们采用了MC9S12XS128单片机、TSL1401CL线性CCD图像采集模块、稳压芯片以及液晶OLED等外围器件设计与开发出这套智能小车系统。
MC9S12XS128高速单片机为Freescale公司新推出的16位高性能高速单片机,其接口丰富、功耗低、信息处理能力强大,能对小车前方路径及障碍进行及时分析,处理迅速、性能稳定。
为了提高路面图像采集的速度与质量,我们选用了TSL1401CL线性CCD图像传感器。
TSL1401CL 具有功耗小、性能稳定、灵敏度高、响应速度快等优点,其工作过程是先将路况光学信号转换为模拟电流,模拟电流放大后再进行A/D转换变成数字信号,最后通过串口送至主控CPU。
智能小车的CPU根据CCD采集到的信息进行分析和处理,从而实现系统的自动控制与障碍处理、路径探测。
在软件设计中我们采用了先进的PID(比例、积分、微分)算法,其运算参数可以根据过程的动态特性及时整定。
通过PID算法,模糊PID算法来实现智能车的转向、控速等精确自动控制,另外还有很好的避障功能,实现了全智能的安全控制。
2 系统硬件设计
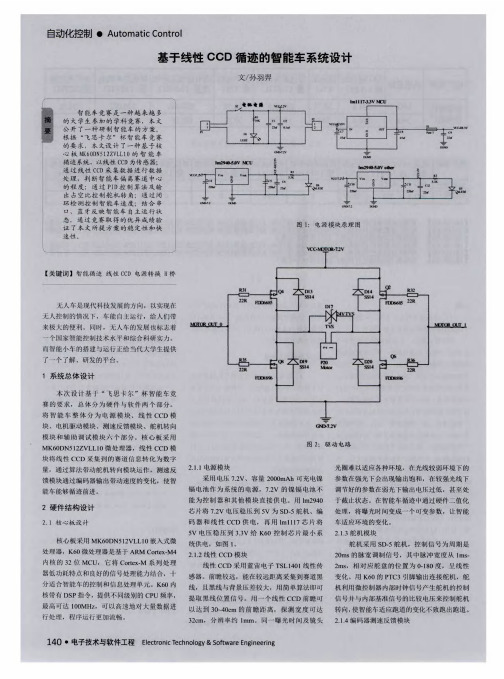
本项目采用模块化设计与开发,主要有CCD采集模块、电源模块、电机驱动模块、车速。