机器人等级考试三级知识点
机器人考级三级知识点总结

机器人考级三级知识点总结机器人越来越成为我们生活中的重要角色,它们不仅在工业生产领域发挥着重要作用,还在家庭、医疗、教育等领域得到广泛应用。
机器人考级三级是机器人领域的一项重要考级,通过该考级,人们可以更全面地了解机器人的相关知识和技能。
本文将从机器人的基本概念、结构和原理、编程与控制、应用与发展等方面对机器人考级三级的知识点进行总结。
一、机器人的基本概念1. 机器人的定义和分类机器人是一种能够执行任务的自动化装置,它可以根据预先设定的程序或指令来执行各种任务。
根据功能和用途的不同,机器人可以分为工业机器人、服务机器人、特种机器人等不同类型。
2. 机器人的特点机器人具有自主性、感知、决策和执行能力,能够完成指定的任务,并且可以适应环境的变化。
二、机器人结构和原理1. 机器人的结构机器人通常由机械部分、电子部分和控制系统三部分组成。
机械部分包括机器人的机械结构和执行器,电子部分包括传感器、执行器、控制器等,控制系统则是机器人的大脑,能够控制机器人的运动和动作。
2. 机器人的原理机器人的运动原理可以通过运动学、静力学、动力学等方面来解释,不同类型的机器人有不同的运动原理。
例如,工业机器人的运动原理通常基于运动学和轨迹规划,服务机器人的运动原理则涉及到感知和决策流程。
三、机器人编程与控制1. 机器人编程机器人的编程是指对机器人进行程序设计,以实现其自主运动或执行特定任务。
机器人编程可以通过编程语言、仿真软件等形式进行。
2. 机器人控制机器人控制是指对机器人的运动、动作和任务进行控制。
控制系统通常包括传感器、执行器和控制器,能够实现对机器人的实时控制和监控。
四、机器人的应用与发展1. 机器人的应用领域机器人应用已经广泛涉及到工业生产、医疗卫生、家庭服务、军事防卫等多个领域。
工业机器人主要应用在自动化生产线上,服务机器人则主要应用在家庭服务、餐饮、医疗卫生等领域。
2. 机器人的发展趋势未来机器人的发展趋势是智能化、灵巧化、感知化和协作化。
机器人技能等级认证考试规则3级题库
机器人技能等级认证考试(三级例题库)全国学校体育联盟机器人工委资格认证中心制2021年2月一、单选题(每题2分)1、下列所示的杠杆中,属于费力杠杆的是( D )2、如下图所示的工具,在使用中属于费力杠杆的是( D )3、如图所示是一个指甲刀的示意图,它由三个杠杆ABC、OBD和OED组成,用指甲刀剪指甲时,下面说法正确的是( C )A.三个杠杆都是省力杠杆B.三个杠杆都是费力杠杆C.ABC是省力杠杆,OBD、OED是费力杠杆D.ABC是费力杠杆,OBD、OED是省力杠杆4、人体的运动系统相当复杂,但最基本的运动形式是骨骼在肌肉提供的动力作用下绕关节转动。
如图所示是手端起茶杯的情景,其前臂骨骼相当于杠杆,肱二头肌收缩提供动力,由图可以看出,这是一( A )A.费力、省距离的杠杆B.省力、费距离的杠杆C.既费力,也费距离的杠杆D.既省力,也省距离的杠杆5、室内垃圾桶平时桶盖关闭不使垃圾散发异味,使用时用脚踩踏板,桶盖开启。
根据室内垃圾桶的结构示意图可确定( D )A桶中只有一个杠杆在起作用,且为省力杠杆B桶中只有一个杠杆在起作用,且为费力杠杆C桶中有两个杠杆在起作用,用都是省力杠杆D桶中有两个杠杆在起作用,一个是省力杠杆,一个是费力杠杆6、如图所示,一根粗细不均匀的树干在O点支起,恰好平衡;如果在O点处将它锯断,则( C )A两段树干的重力相等 B细而长的—段重C粗而短的一段重 D无法判断7、以下那位科学家发现了杠杆原理是( D )A奥本海默 B爱因斯坦C霍金 D阿基米德8、机器人的英文单词是( C )Abotre Bboret Crobot Drebot9、以下说法中不正确的是( C )A人类智能是与生俱来的B人工智能是人类赋予的C机器人不属于人工智能D人工智能是模仿人类智能10、下面哪种结构放在地面上最容易倾倒( C )A B C D11、盘山公路总是修的弯弯曲曲,环绕山坡盘山而上,而不是从山下直通山顶,这是为了( C )A美观 B省距离 C省力 D经济12、如下图所示,利用定滑轮匀速提升重物G,向三个方向拉动的力分别是F1、F2、F3,三个力的大小关系是( D )AF1最大 BF2最大 CF3最大 D一样大13、使用轮轴时,下面说法中错误的是( A )A轮轴只能省力一半B动力作用在轮上可以省力C动力作用在轴上不能省力D使用轮半径与轴半径之比为2:1的轮轴时,可以省力一半(动力作用在轮上)14、如下图所示,人们可以很轻松的将水桶从水井中提出,是利用了机器( A )A轮轴 B滑轮 C斜面 D螺旋15、在你学过的简单机械中,正常使用时,既可能省力又可能费力的机械是( A )A杠杆 B动滑轮 C定滑轮 D滑轮组16、下图中,沿着哪个斜面向上拉动小车最省力( D )A B C D17、木工师傅使用斧头作为工具,是利用能省力的原理( C )A滑轮 B轮轴 C斜面 D杠杆18、下列说法不正确的是( D )A利用机械既可以减轻体力劳动,又可以提高工作效率B杠杆是一种简单的机械,杆的形状可以是直的,也可以是弯曲的C滑轮是属于杠杆变形的一种简单机械D以上说法均不正确19、关于力臂,下列说法正确的是( C )A支点到动力作用点的距离叫动力臂B支点到阻力作用点的距离叫阻力臂C支点到力的作用线的垂直距离叫力臂D杠杆的力臂一定在杠杆之上20、有一对传动齿轮,主动轮的转速480转每分钟,主动轮的齿数是20,从动轮的齿数是40,从动轮的转速是转每分钟( B )A120 B240 C480 D96021、链传动相比齿轮传动的优点是?( A )A可以在两轴中心相距较远的情况下传递运动和动力。
机器人等级考试三级知识点

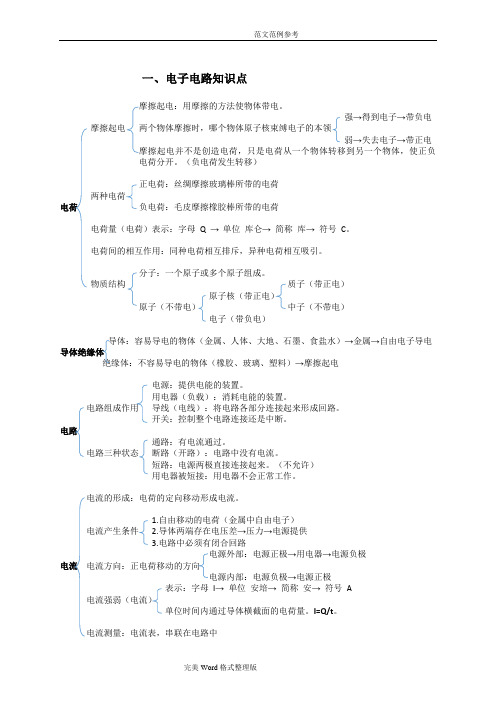
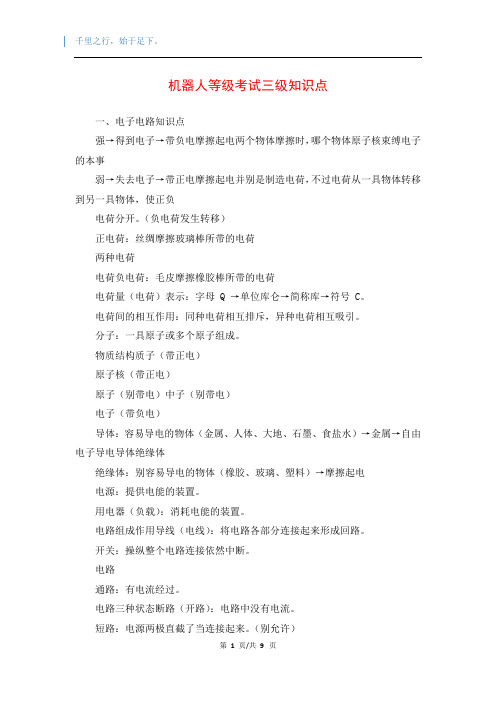
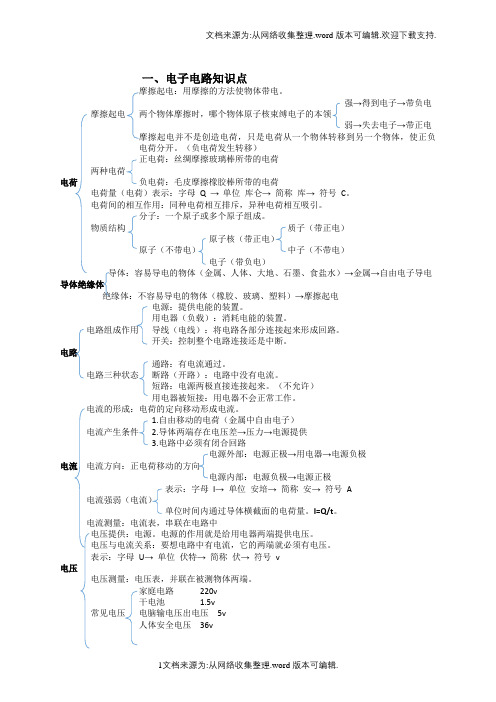
一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不就是创造电荷,只就是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q → 单位库仑→简称库→符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电) 中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还就是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1、自由移动的电荷(金属中自由电子)电流产生条件2、导体两端存在电压差→压力→电源提供3、电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池1、5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么就是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
机器人等级考试三级知识点汇总
机器人等级考试三级知识点汇总?答:机器人等级考试三级的知识点涉及多个方面,包括电子电路基础、程序设计和机器人搭建等。
以下是一些主要知识点的汇总:1.电子电路基础:需要掌握电流、电压、电阻、导体、半导体等概念,理解串联、并联电路的原理,以及能够处理简单的电路连接问题。
此外,还需要了解电子电路领域的相关理论,如欧姆定律、基尔霍夫定律等。
2.程序设计:应熟悉程序的三种基本结构(顺序、选择和循环),掌握程序流程图的绘制方法,能够使用图形化编程软件进行程序设计。
此外,还需要了解变量的概念和应用,以及函数的基本定义和使用方法。
3.机器人搭建:需要了解机器人的基本构成和搭建方法,包括机械结构、电子电路和程序控制等方面。
应能够根据实际需求选择合适的硬件和软件组件,完成机器人的搭建和调试工作。
4.传感器应用:需要了解各种传感器的原理和应用方法,如光电传感器、超声波传感器、温度传感器等。
应能够根据实际需求选择合适的传感器,并将其应用到机器人中,实现特定的功能。
5.电机控制:需要了解电机的种类和控制方法,如直流电机、步进电机、伺服电机等。
应能够根据实际需求选择合适的电机,并掌握其控制方法,实现机器人的运动控制。
6.通信技术:需要了解基本的通信技术,如串口通信、无线通信等。
应能够根据实际需求选择合适的通信方式,实现机器人与外部设备或网络的数据交换和控制功能。
7.机器人常用知识:需要了解机器人的发展历程、应用领域和未来趋势等方面的知识。
同时还需要了解机器人比赛和评测的相关规则和标准,为参加机器人比赛和评测做好准备。
以上知识点是机器人等级考试三级的主要内容,但具体考试要求和内容可能会因考试机构和标准而有所不同。
建议参考相关教材和考试大纲进行系统学习和准备。
三级机器人考试题及答案

三级机器人考试题及答案一、单项选择题(每题2分,共10题)1. 机器人的三大核心组成部分不包括以下哪一项?A. 传感器B. 执行器C. 控制器D. 能源供应答案:D2. 在机器人编程中,以下哪个不是常用的编程语言?A. PythonB. JavaC. C++D. HTML答案:D3. 机器人的运动控制通常涉及到哪种类型的算法?A. 模糊算法B. 遗传算法C. 神经网络算法D. 所有以上答案:D4. 机器人视觉系统的主要功能是什么?A. 导航B. 物体识别C. 语音识别D. 环境感知答案:B5. 以下哪个传感器不适用于机器人的触觉反馈?A. 压力传感器B. 温度传感器C. 距离传感器D. 光线传感器答案:D6. 机器人的自由度(DOF)是指什么?A. 机器人的重量B. 机器人的尺寸C. 机器人可以独立移动的轴的数量D. 机器人的能源消耗答案:C7. 在机器人设计中,以下哪个不是考虑的因素?A. 安全性B. 效率C. 外观D. 材料成本答案:C8. 机器人操作系统(ROS)的主要作用是什么?A. 机器人的能源管理B. 机器人的硬件控制C. 机器人的软件框架D. 机器人的通信协议答案:C9. 以下哪个不是机器人的驱动方式?A. 电动B. 气动C. 液动D. 手动答案:D10. 机器人的路径规划通常使用哪种算法?A. A*算法B. Dijkstra算法C. 遗传算法D. 所有以上答案:D二、多项选择题(每题3分,共5题)1. 机器人在工业应用中的优势包括哪些?A. 提高生产效率B. 减少人工成本C. 提高产品质量D. 增加工作乐趣答案:ABC2. 以下哪些是机器人感知环境的传感器?A. 摄像头B. 超声波传感器C. 红外传感器D. 温度计答案:ABC3. 机器人编程中可能用到的数据结构包括哪些?A. 数组B. 链表C. 树D. 图答案:ABCD4. 机器人的安全性设计需要考虑哪些因素?A. 防护罩B. 紧急停止按钮C. 速度限制D. 负载限制答案:ABCD5. 以下哪些是机器人的常见应用领域?A. 制造业B. 医疗C. 服务业D. 娱乐答案:ABCD三、判断题(每题1分,共5题)1. 机器人可以完全替代人类进行所有工作。
全国青少年机器人技术等级考试三四级知识点概

全国青少年机器人技术等级考试三四级知识点概要(精髓)一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q → 单位库仑→ 简称库→ 符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→ 单位安培→ 简称安→ 符号 A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→ 单位伏特→ 简称伏→ 符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
机器人等级考试三级知识点

机器人等级考试三级知识点一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母 Q → 单位库仑→简称库→符号 C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件 2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母 I→单位安培→简称安→符号 A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中特点 4.总电阻等于各部分电阻之和。
5.各元件电压和电阻成正比。
6.开关在任何位置都能控制整个电路。
7.电路一处断开,所有元件都不能工作。
定义:并联就是把电路中的各电子元件的两端分别连接在一起并联电路 1.多个回路。
(分流) 2.干路总电流等于各支路电流之和。
3.各支路两端电压相等。
机器人等级考试三级知识点汇总
一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q → 单位库仑→简称库→符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件 2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池 1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
全国青少年机器人技术三级考点

全国青少年机器人技术三级考点一、机器人基础知识1. 机器人的定义:机器人是一种能够执行特定任务的自动化设备,它具有感知、决策和执行能力。
2. 机器人的组成部分:机械结构、传感器、控制系统、执行器等。
3. 机器人的分类:按应用领域可以分为工业机器人、服务机器人、农业机器人等;按机械结构可以分为轮式机器人、足式机器人、多足机器人等;按功能可以分为搬运机器人、装配机器人、巡检机器人等。
4. 机器人的工作原理:感知环境、分析信息、做出决策、执行任务。
5. 机器人的应用领域:工业制造、医疗护理、农业生产、教育培训等。
二、机器人编程1. 编程语言:机器人常用的编程语言有C++、Python、Java等,不同的编程语言适用于不同类型的机器人。
2. 编程环境:机器人编程可以使用专门的集成开发环境(IDE),如Arduino、ROS等。
3. 编程方法:机器人编程可以采用图形化编程方式,如Scratch、Blockly;也可以采用文本编程方式,如C语言、Python。
4. 编程技巧:机器人编程需要掌握基本的逻辑思维和算法设计能力,如循环、条件判断、函数调用等。
三、机器人传感器1. 触觉传感器:用于感知机器人的接触力、形变等信息,常见的触觉传感器有压力传感器、力敏传感器等。
2. 视觉传感器:用于感知机器人周围环境的视觉信息,常见的视觉传感器有摄像头、激光雷达等。
3. 声音传感器:用于感知机器人周围的声音信号,常见的声音传感器有麦克风、声纳等。
4. 距离传感器:用于感知机器人与周围物体的距离,常见的距离传感器有超声波传感器、红外线传感器等。
四、机器人控制1. 控制系统:机器人的控制系统负责接收传感器的信号,并根据预设的算法做出相应的控制指令。
2. 反馈控制:机器人的控制系统可以根据传感器的反馈信息进行实时调整,使机器人达到更精确的控制。
3. 导航控制:机器人的导航控制可以通过路径规划算法实现,使机器人能够自主定位和导航。
机器人等级考试三级知识点
机器人等级考试三级知识点一、电子电路知识点强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本事弱→失去电子→带正电摩擦起电并别是制造电荷,不过电荷从一具物体转移到另一具物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q →单位库仑→简称库→符号 C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一具原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(别带电)中子(别带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:别容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:操纵整个电路连接依然中断。
电路通路:有电流经过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直截了当连接起来。
(别允许)用电器被短接:用电器不可能正常工作。
电流的形成:电荷的定向挪移形成电流。
1.自由挪移的电荷(金属中自由电子)电流产生条件 2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷挪移的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号 A电流强弱(电流)单位时刻内经过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用算是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号 v电压电压测量:电压表,并联在被测物体两端。
家庭电路 220v干电池 1.5v常见电压电脑输电压出电压 5v人体安全电压 36v动力电路 380v低压 1000v以下高压 1000v以上啥是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
全国机器人等级考试三级

1、在机器人编程中,以下哪个语句用于让机器人前进一段指定的距离?A. turnLeft()B. moveBackward()C. moveForward()D. stopMoving()(答案:C)2、关于机器人的传感器,下列说法错误的是?A. 传感器是机器人获取外界信息的重要工具B. 红外传感器可以检测障碍物的存在C. 触碰传感器在未被触碰时输出高电平D. 声音传感器可以感知声音的强度和频率(答案:C,通常触碰传感器在未被触碰时输出低电平)3、在机器人路径规划中,A算法相较于Dijkstra算法的优势在于?A. A算法总是能找到最短路径B. A算法计算速度更快C. A算法考虑了目标位置的信息,搜索更有方向性D. Dijkstra算法无法处理有权图(答案:C)4、以下哪种通信方式常用于机器人之间的无线数据传输?A. 蓝牙B. 红外线C. 有线连接D. 光纤(答案:A)5、在机器人视觉系统中,图像识别技术主要用于?A. 测量物体的距离B. 检测物体的形状和颜色C. 计算物体的重量D. 追踪物体的运动轨迹(答案:B,虽然也可以用于追踪,但更核心的是形状和颜色识别)6、关于机器人的动力来源,下列哪种不是常见的能源形式?A. 电能B. 太阳能C. 化学能(如电池)D. 水力能(答案:D,水力能通常不直接用于小型或移动机器人)7、在机器人控制系统中,PID控制器的主要作用是?A. 实现精确的位置控制B. 检测机器人的速度C. 规划机器人的路径D. 监控机器人的电量(答案:A)8、关于机器人的学习能力,下列说法正确的是?A. 所有机器人都具备自主学习能力B. 机器人学习只能通过监督学习实现C. 机器学习算法可以帮助机器人从数据中提取有用信息并改进其行为D. 机器人无法模仿人类的行为(答案:C)。
机器人等级考试三级知识点
一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q → 单位库仑→简称库→符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件 2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池 1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
青少年机器人等级考试三级题库

青少年机器人等级考试三级题库一、选择题程序模块题目:当变量i的值为255时,该程序模块的返回值是()。
选项:A. 0 B. 255 C. 512 D. 1023答案:C电路原理图题目:在电路原理图中,某标识符表示的是()。
选项:A. 电阻 B. LED C. 二极管 D. 光敏电阻答案:DArduino相关题目:下列有关Arduino的描述中,正确的是()。
选项:A. Arduino仅指硬件主控板 B. Arduino是指ArduinoIDE C. Arduino起源于中国 D. Arduino以开源的方式进行推广答案:D题目:Arduino UNO/Nano主控板,使用电位器控制舵机的转动角度,电位器连接在A5引脚,舵机连接在A0引脚,下列选项中,实现当电位器从一端旋转至另外一端时,舵机从0度旋转至180度的程序是()。
选项:(此题为选择题,但选项内容未直接给出,需根据具体程序判断)答案:(需根据具体程序选项确定)器件类别题目:一般情况下,下列程序模块对应的器件类别是()。
选项:A. 传感器 B. 执行器 C. 触发器 D. 控制器答案:B安全电压题目:正常情况下,人体的安全电压不高于()。
选项:A. 24V B. 36V C. 220V D. 380V答案:B二、判断题(注意:判断题的具体表述和答案可能因题库版本而异,以下仅为示例)串联电路特性题目:串联电路只要有一处断开,整个电路就成为断路。
答案:对Arduino工作电压题目:Arduino UNO/Nano主控板的工作电压是12V。
答案:错(通常为5V)欧姆定律题目:根据欧姆定律可知,当电压不变时,电路中电流随着电阻的增大而减小。
答案:对三、程序设计与分析(注意:程序设计与分析题的具体内容和答案可能因题库版本和具体题目要求而异,以下仅为示例)程序设计题目:使用Arduino UNO/Nano主控板,设计一个程序,通过电位器控制舵机的转动角度,实现当电位器从一端旋转至另外一端时,舵机从0度旋转至180度。
机器人等级考试三级知识点

机器人等级考试三级知识点一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本事弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q → 单位库仑→简称库→符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流经过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件 2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号 A电流强弱(电流)单位时间内经过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池 1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
机器人等级考试三级知识点汇总

一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v以下高压1000v以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
表示:字母R→单位欧姆→简称欧→符号?导体的电阻是导体本身的一种性质,它的大小与导体的材料、长度和横截面积有关。
电阻影响电阻大小因素材料:一般情况,材料不同电阻不同因素长度:同种材料,横截面一定,长度越长电阻越大。
横截面:同种材料,长度一定,横截面积越大电阻越小。
特点欧姆定律:导体中的电流,跟导体两端的电压成正比,跟导体的电阻成反比。
电阻的测量:伏安法测电阻。
电阻的大小可以通过电压和电流来计算,但不是影响电阻的要素。
P型半导体(加入空穴带正电)PN结合在一起中间形成PN结→内电场N型半导体(加入电子带负电)正向导通二极管特性:单向导电性反向截止半导体二极管:把PN结两端引出两个电极封装起来就形成了半导体二极管。
1、发光二极管2、整流二极管应用3、开关二极管4、检波二极管5、限幅二极管6、稳压二极管1.半导体三极管(双极型晶体管,晶体三极管)2.半导体基本元件之一NPN三极管3.两个PN结PNP集电极、基极、发射极4.结构集电区、基区、发射区集电结、发射结5.应用:放大作用,开关作用(控制电路通断)1.容纳电荷的元器件1.2.数字量:时间离散,数值也离散的信号就是数字信号→数字电路(处理数字信号电路)3.在数字电路中,可以用1.希腊哲学家泰勒斯摩擦琥珀吸引羽毛磁石吸引铁片这两种物体对其他物体有吸引力2.英国物理学家吉尔伯特摩擦琥珀吸引羽毛的现象不仅存在于琥珀上,而且存在于硫磺、毛皮、3.4.5.6.德国物理学家欧姆发现了电流公式也叫欧姆定律二、编程知识点1.程序:程序就是为了实现特定目标或解决特定问题而用计算机语言编写的一系列指令序列。
机器人 三四级基础知识点
机器人三四级基础知识点嘿,朋友!今天咱们来聊聊机器人三四级那些基础知识点,这可有趣又有用呢!你知道吗?机器人就像是我们的超级小伙伴,它们有着各种神奇的本事。
比如说,机器人的传感器,这就好比是机器人的“眼睛”和“耳朵”,能帮它们感知周围的世界。
就像我们靠眼睛看、耳朵听来了解周围环境一样,机器人靠传感器来获取信息。
再说说机器人的控制系统,这可是它们的“大脑”哟!指挥着机器人的一举一动。
你想想,如果一个人的大脑乱了套,那得多糟糕呀!机器人也是这样,没有一个好的控制系统,就会变得笨手笨脚,啥也干不好。
还有机器人的驱动系统,这就像是机器人的“肌肉”,让它们能有力气动起来。
是不是很神奇?这和我们人类靠肌肉来运动是不是很像呢?在机器人三四级的知识里,编程也是相当重要的一部分。
编程就像是给机器人下达的“命令书”,告诉它们要做什么,怎么做。
要是编程出了错,那机器人可能就会做出一些让人哭笑不得的事情来,难道不是吗?学习机器人的结构知识也很关键。
就像盖房子得先了解房子的结构一样,要想让机器人厉害,就得清楚它们是怎么组成的。
不同的结构能让机器人有不同的功能,这可太有意思啦!而且,对于机器人的能源系统也不能忽视。
没有能源,机器人就像没电的玩具,啥也干不了。
这就像我们人饿了没力气一样,机器人没了能源也会“瘫软”下来。
总之,机器人三四级的基础知识点就像是一个个神奇的魔法钥匙,能打开机器人世界的大门。
只有把这些知识都掌握好,我们才能真正了解机器人的奥秘,创造出更厉害的机器人伙伴,为我们的生活带来更多的便利和惊喜!难道你不想成为那个掌握魔法钥匙的人吗?。
机器人三级理论知识点总结

机器人三级理论知识点总结1. 机器人的基本概念及发展历程1.1 机器人的定义和分类1.2 机器人的发展历程1.3 机器人的发展趋势2. 机器人的感知与认知2.1 机器人的传感器和感知技术2.2 机器人的环境建模与定位技术2.3 机器人的人工智能与认知技术3. 机器人的运动与控制3.1 机器人的运动学与动力学3.2 机器人的路径规划与运动控制技术3.3 机器人的自主导航与智能控制技术4. 机器人的应用领域及发展趋势4.1 工业机器人的应用4.2 服务机器人的应用4.3 农业机器人的应用4.4 医疗机器人的应用4.5 教育机器人的应用5. 机器人的伦理与社会影响5.1 机器人的伦理问题5.2 机器人的社会影响5.3 机器人的法律与政策以上是机器人三级理论知识点总结,下面将对每一部分进行详细介绍。
1. 机器人的基本概念及发展历程1.1 机器人的定义和分类机器人是指一种能够自主执行任务的机械装置,通常使用计算机进行控制。
根据其功能和应用领域的不同,机器人可以分为工业机器人、服务机器人、农业机器人、医疗机器人、教育机器人等不同类型。
1.2 机器人的发展历程机器人的发展可以追溯至古代的机械装置,但现代机器人的发展始于20世纪40年代。
随着科学技术的不断进步,机器人的功能和性能得到了极大的提升,逐渐应用于工业生产、服务领域、农业生产、医疗卫生以及教育培训等多个领域。
1.3 机器人的发展趋势随着人工智能、传感技术、材料科学、机电一体化等前沿技术的不断发展,机器人的性能将进一步提升,应用领域也将不断拓展。
未来随着人类社会的不断发展,机器人将成为人类重要的助手和伙伴。
2. 机器人的感知与认知2.1 机器人的传感器和感知技术机器人的传感器是其感知外部环境的重要装置,包括摄像头、激光雷达、超声波传感器、红外传感器、接触传感器等。
这些传感器可以帮助机器人获取环境信息,从而进行适应性的行为。
2.2 机器人的环境建模与定位技术机器人的环境建模和定位技术是指通过传感器获取的环境信息来进行地图建模和自身定位的技术。
机器人等级考试三级知识点(1-8)
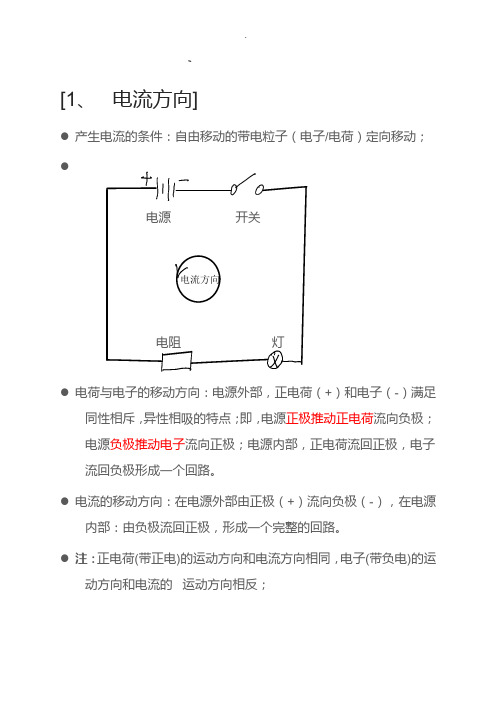
[1、电流方向]●产生电流的条件:自由移动的带电粒子(电子/电荷)定向移动;●●电荷与电子的移动方向:电源外部,正电荷(+)和电子(-)满足同性相斥,异性相吸的特点;即,电源正极推动正电荷流向负极;电源负极推动电子流向正极;电源内部,正电荷流回正极,电子流回负极形成一个回路。
●电流的移动方向:在电源外部由正极(+)流向负极(-),在电源内部:由负极流回正极,形成一个完整的回路。
●注:正电荷(带正电)的运动方向和电流方向相同,电子(带负电)的运动方向和电流的运动方向相反;[2、串并联与实物图及元件表示符号]●串联电路图:●●电流特点:电流处处相等;即,即I=I1=I2=……=In.●电压特点:总电压等于各分电压之和,即U=U1+U2+……+Un.。
●电阻特点:总电阻等于各电阻之和,即R=R1+R2+……+Rn●●●●●●●●并联电路图:●●电流特点:干路(总)电流是各支路的电流之和,即I=I1+I2+……+In.●电压特点:干路(总)电压等于各支路电压,即U=U1=U2=……=Un.[3、数字信号与模拟信号及特点与元件]●数字信号●时间1、数字信号特点:离散型;2、数字输入元件:按钮、红外传感器、超声波传感器的echo引脚;3、数字输出元件:马达(直流马达、舵机)、led灯、蜂鸣器,超声波传感器的trig引脚;4、数字输入/输出值的范围:0或1;5、数字输入的引脚:D0~D13、A0~A5 ;6、数字输出的引脚:D0~D13、A0~A5;7、数字信号:0(低电平)或1(高电平);1)在程序中(选择题),高、低电平对应的是一个准确的数值高电平(5V)、低电平(0V);2)在文字叙述中(判断题),高、低电平对应的则是一个范围;3)数字信号中,数字0对应0V,非零数字对应5V。
●●模拟信号时间1、模拟信号特点:连续性(在时间和数值上都具有连续性);2、模拟信号:声音的大小、速度的快慢、光照的强弱、温湿度的高低等;3、模拟输入的元件:旋钮(电位器)、光敏电阻等模拟信号传感器;4、模拟输出的元件:模拟输入元件控制变化的元件就是模拟输出元件,例如,旋钮控制led灯渐变时,led灯此时就是模拟输出控制的元件;5、模拟输入引脚:A0~A5;6、模拟输出引脚:D3、D5、D6、D9、D10、D11;7、模拟数值是通过“占空比”实现电压的输入输出的;8、模拟输入值的范围:0(0V)~1023(5V);9、模拟输入值的范围:0(0V)~255(5V);[4、存储器的类型和内存大小]●动态存储器:SRAM ,内存2KB●闪存:Flash,内存32KB●电子可擦存储器:EEPROM,内存1KB[5、论点:输入被读取,输出被写入]●传感器属于输入元件,把外部信号转成电信号被CPU读取;●执行器属于输出元件,CPU输出信号控制它执行对应命令;●注:在信息控制中,模拟输入信号对应控制输出的信号优先选择是模拟输出信号。
机器人等级考试三级题库

机器人等级考试三级题库机器人等级考试三级题库参考内容1. 机器人操作系统- 介绍机器人操作系统(ROS)的基本概念和架构- ROS的核心功能和应用领域- ROS中的主要组件和工具- ROS的安装和配置方法- 使用ROS进行机器人控制和导航的示例代码2. 机器视觉- 机器视觉的基本概念和原理- 图像处理和计算机视觉的主要技术- 使用OpenCV进行图像处理和分析的示例代码- 目标检测和识别的算法和方法- 三维重建和点云处理的基本原理和应用3. 机器学习与深度学习- 机器学习和深度学习的基本概念和原理- 监督学习、无监督学习和强化学习的区别和应用- 常用的机器学习和深度学习算法和模型- 使用TensorFlow或PyTorch进行机器学习和深度学习的示例代码- 训练和优化神经网络的方法和技巧4. 机器人感知与导航- 机器人感知的基本原理和技术- 使用传感器进行环境感知和数据获取的方法- 基于激光雷达和视觉传感器的SLAM算法和实现- 使用导航堆栈进行机器人路径规划和导航控制- 自主导航和导航决策的方法和策略5. 机器人控制与操作- 机器人动力学和控制的基本原理和方法- PID控制器和反馈控制的原理和应用- 使用ROS控制机器人运动和姿态的示例代码- 机器人操作和运动规划的算法和技术- 机器人和人机交互的设计原则和方法以上内容是机器人等级考试三级题库的参考内容,对于机器人爱好者或专业人士来说,这些内容涉及了机器人操作系统、机器视觉、机器学习与深度学习、机器人感知与导航、机器人控制与操作等方面的知识。
通过学习和掌握这些知识,可以提高机器人的感知能力、学习能力和控制能力,从而实现更复杂和智能的机器人应用。
机器人三级考试内容

机器人三级考试内容三级机器人考试的内容可以简单总结为:
一、机器人概念与设计:
1.机器人的历史和发展现状;
2.机器人框架、结构设计;
3.机器人控制系统基础;
4.机器人感知器及传感器;
5.机器人运动性能;
6.机器人测量及导航以及定位;
7.机器人可靠性和安全性;
8.协调多个机器人工作;
9.多机器人对抗;
10.机器人实时配置及网络化系统。
二、机器人控制原理和技术:
1.运动控制基础;
2.机器人解算公式;
3.运动特性分析;
4.机器人控制系统;
5.逆解算和正解算;
6.模糊控制、神经网络及其他技术;
7.机器学习、智能控制及遗传算法;
8.机器人定位系统;
9.故障诊断与容错;
10.并行控制及可重定位控制。
三、现代机器人技术:
1.机器视觉;
2.多机器人系统;
3.机械手;
4.机器人装配;
5.空间机器人;
6.遥控机器人;
7.轮式机器人;
8.扫地机器人;
9.智能机器人;
10.五元素机器人设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、电子电路知识点摩擦起电:用摩擦的方法使物体带电。
强→得到电子→带负电摩擦起电两个物体摩擦时,哪个物体原子核束缚电子的本领弱→失去电子→带正电摩擦起电并不是创造电荷,只是电荷从一个物体转移到另一个物体,使正负电荷分开。
(负电荷发生转移)正电荷:丝绸摩擦玻璃棒所带的电荷两种电荷电荷负电荷:毛皮摩擦橡胶棒所带的电荷电荷量(电荷)表示:字母Q →单位库仑→简称库→符号C。
电荷间的相互作用:同种电荷相互排斥,异种电荷相互吸引。
分子:一个原子或多个原子组成。
物质结构质子(带正电)原子核(带正电)原子(不带电)中子(不带电)电子(带负电)导体:容易导电的物体(金属、人体、大地、石墨、食盐水)→金属→自由电子导电导体绝缘体绝缘体:不容易导电的物体(橡胶、玻璃、塑料)→摩擦起电电源:提供电能的装置。
用电器(负载):消耗电能的装置。
电路组成作用导线(电线):将电路各部分连接起来形成回路。
开关:控制整个电路连接还是中断。
电路通路:有电流通过。
电路三种状态断路(开路):电路中没有电流。
短路:电源两极直接连接起来。
(不允许)用电器被短接:用电器不会正常工作。
电流的形成:电荷的定向移动形成电流。
1.自由移动的电荷(金属中自由电子)电流产生条件 2.导体两端存在电压差→压力→电源提供3.电路中必须有闭合回路电源外部:电源正极→用电器→电源负极电流电流方向:正电荷移动的方向电源内部:电源负极→电源正极表示:字母I→单位安培→简称安→符号 A电流强弱(电流)单位时间内通过导体横截面的电荷量。
I=Q/t。
电流测量:电流表,串联在电路中电压提供:电源。
电源的作用就是给用电器两端提供电压。
电压与电流关系:要想电路中有电流,它的两端就必须有电压。
表示:字母U→单位伏特→简称伏→符号v电压电压测量:电压表,并联在被测物体两端。
家庭电路220v干电池 1.5v常见电压电脑输电压出电压5v人体安全电压36v动力电路380v低压1000v 以下高压1000v 以上什么是电阻:导体对电流阻碍的大小用电阻来表示,电阻越大对电流的阻碍越大。
表示:字母R→单位欧姆→简称欧→符号?导体的电阻是导体本身的一种性质,它的大小与导体的材料、长度和横截面积有关。
电阻影响电阻大小因素材料:一般情况,材料不同电阻不同因素长度:同种材料,横截面一定,长度越长电阻越大。
横截面:同种材料,长度一定,横截面积越大电阻越小。
定值电阻:实验室常用的定值电阻是色环电阻(五色环)分类变阻器(电位器):常用滑动变阻器,通过改变导体长度来改变电阻的大小。
特殊电阻:光敏、热敏、压敏。
定义:串联就是把电路中的各个元件用导线依次连接起来1.只有一个回路,电流只有一条路径。
串联电路 2.电流处处相等。
(分压) 3.总电压等于各元件两端电压之和。
特点 4.总电阻等于各部分电阻之和。
4.各元件电压和电阻成正比。
5.开关在任何位置都能控制整个电路。
6.电路一处断开,所有元件都不能工作。
定义:并联就是把电路中的各电子元件的两端分别连接在一起并联电路 1.多个回路。
(分流) 2.干路总电流等于各支路电流之和。
3.各支路两端电压相等。
特点 4.总电阻小于各支路电阻,总电阻的倒数等于各支路电阻的倒数之和。
5.各支路电流与电阻成反比。
电阻越大流过电流越小。
6.干路开关控制整个电路,支路开关控制与其串联部分。
7.支路一处断开,其他支路正常,干路一处断开,则整个电路断开。
欧姆定律:导体中的电流,跟导体两端的电压成正比,跟导体的电阻成反比。
欧姆定律公式:I=U/R电阻的测量:伏安法测电阻。
电阻的大小可以通过电压和电流来计算,但不是影响电阻的要素。
电阻的大小是导体本身一种性质半导体:导电能力介于导体和绝缘体之间P型半导体(加入空穴带正电)PN 结合在一起中间形成PN 结→内电场N 型半导体(加入电子带负电)正向导通二极管特性:单向导电性反向截止半导体二极管:把PN结两端引出两个电极封装起来就形成了半导体二极管。
1、发光二极管2、整流二极管应用3、开关二极管4、检波二极管5、限幅二极管6、稳压二极管2.半导体三极管(双极型晶体管,晶体三极管)3.半导体基本元件之一NPN 三极管 3.两个PN结PNP集电极、基极、发射极7.结构集电区、基区、发射区集电结、发射结8.应用:放大作用,开关作用(控制电路通断)4.容纳电荷的元器件5.表示:符号C→单位法拉→简称法→符号F电容 3.通常体积大的电容量也大8.分类:独石电容,电解电容存储电能(充电→放电)9.作用滤波(通交流,阻直流)电容对于交流相当于导线,对于直流相当于断开。
4.模拟量:在时间和数值上都连续的物理量。
表示模拟量的信号就是模拟信号。
处理模拟信号的电路称之模拟电路。
5.数字量:时间离散,数值也离散的信号就是数字信号→数字电路(处理数字信号电路)6.在数字电路中,可以用0和1组成的二进制代表数量的大小,也可以用0和1表示两模拟数字种不同的逻辑状态。
7.逻辑运算:与运算,或运算,非运算8.单片机→微型计算机→单片微型控制器→主机→主控板→机器人大脑9.IO口:输入、输出接口。
输入输出高低电平都可以。
电子电路领域相关理论和相关人物9.希腊哲学家泰勒斯摩擦琥珀吸引羽毛磁石吸引铁片这两种物体对其他物体有吸引力10.英国物理学家吉尔伯特摩擦琥珀吸引羽毛的现象不仅存在于琥珀上,而且存在于硫磺、毛皮、陶瓷、纸、橡胶等摩擦起电的物质。
证明电是地地道道的物质。
11.美国物理学家富兰克林发现电荷分为“正”“负”之分,而且两者的数量是守恒的。
风筝实验,证明雷电是由电力造成的12.意大利帕维亚大学教授伏特制造了起电盘,静电计等仪器。
发明了伏打电堆。
电动势取名为伏特。
13.英国物理学家法拉第发现电磁感应现象发明了圆盘发电机引入了电场和磁场的概念冰桶实验证明了电荷守恒定律14.德国物理学家欧姆发现了电流公式也叫欧姆定律编程知识点二、10.程序:程序就是为了实现特定目标或解决特定问题而用计算机语言编写的一系列指令序列。
11.计算机语言:人与计算机之间交流的语言。
↓机器语言(0,1 )→计算机能直接识别发展符号语言(汇编语言,低级语言)编译程序软件高级语言( C 语言,C++)源程序目标程序12.C 语言用途:应用软件、系统软件、大型游戏。
15.语言简洁、紧凑,使用方便、灵活。
16.运算符丰富17.数据类型丰富18.具有结构化的控制语句。
(if else while )6.C 语言特点 5.语法限制不太严谨,程序设计自由度大。
10.C 语言允许直接访问物理地址,能进行位(bit)操作。
11.用C语言编写的程序可移植性好。
12.生成目标代码质量高,程序执行效率高。
5.C 语言程序举例#include<stdio.h> // #开头预处理命令包含一个标准的输入输出头文件int main() // 定义主函数{ // 函数开始printf("This is a C program.\n"); // 输出一行信息rerurn 0; // 函数执行完毕时返回函数值0} // 函数结束1.一个程序由一个或多个源程序文件组成。
2.函数是C程序的主要组成部分。
3.一个函数包括两部分。
函数首部和函数体。
4.函数总是从main 函数开始执行的,不伦main 函数在程序的位置如何。
6.C 结构特点 5.程序中要求计算机完成的操作是由函数中的 C 语句完成的。
书写格式比较自由。
一行内可以写几个语句,一个语句可以分写在多行上,但为了清晰起见,习惯每行只写一个语句。
6.在每个数据声明和语句的最后必须有一个分号。
7.C 语言本身不提供输入输出语句。
8.程序应当包含注释。
(// 单行注释/* 多行注释*/ )13.程序=算法(灵魂)+数据结构(加工对象)↓↓对操作的描述对数据的描述14.算法:为解决一个问题而采取的方法和步骤。
19.有穷性20.确定性7.算法的特性 3.零个或多个输入13.有一个或多个输出14.有效性6.流程图(算法的表示方法)表示程序的开始、结束判断输入输出框处理框流程线顺序结构7.程序的三种基本结构选择结构(分支结构if else)循环结构(重复结构while )常量:在程序运行过程中,其值不能被改变的量8.数据的表现形式变量:在程序运行过程中,其值可以被改变的量5.整型常量十进制小数形式,数字和小数点组成。
123.456,0.345,-57.8,0.0,12.06.实型常量指数形式。
12.34e3(e 后面必须为整数)7.常量普通字符:用单撇号括起来一个字符。
‘a’,‘z’,‘3’,‘#’。
9.字符常量字符常量存储在计算机存储单元中时,并不是存储字符本身,而是以其ASCII码存储的。
例如'a'的ASCII码为97转义字符:以字符“\" 开头的字符序列。
10.字符串常量:用双撇号把若干个字符括起来。
11.符号常量:用#define 指令,指定用一个符号名称代表一个常量。
1.先定义,后使用→定义:名字、类型14.变量2.注意区分变量名和变量值。
命名:变量名、函数名、符号常量名15.标识符:就是一个对象的名字。
1.只能由数字、字母、下划线组成。
规则 2.第一个字符必须为字母或下划线。
15.不能是C语言关键字。
基本整型int →2个或 4 个字节补码存放短整型short (int)→2 个字节整型长整型long(int )→4个字节数值型双长整型long long(int)→8个字节单精度浮点型float →4个字节21.基本数据类型浮点型双精度浮点型double →8个字节非数值型→字符型char →1个字节22.一个字节等于8 位2 进制数。
算数运算符( + - * / % ++ -- )8.运算符关系运算符( > < == >= <= != )逻辑运算符( && || ! )赋值运算符( = += -= *= /= %=)9.优先级:!→算数运算符( * / % + - ) →关系运算符( < <= > >= == !=)→逻辑与→逻辑或→赋值运算符。