使用Dubins路径和回旋曲线进行多个无人机的路径规划
多无人机任务与航迹规划方法综述
多无人机任务与航迹规划方法综述张文博,刘君兰,李瑜,王海林(西安电子科技大学电子工程学院,陕西西安710071)收稿日期:2022-07-130引言多无人机任务规划是指根据无人机需要完成的任务、无人机的数量以及无人机的载荷类型,为各无人机分配任务、规划航线、合理调度,从而达到最大效益。
无人机任务规划一般包括航迹规划、任务分配、数据链路规划、任务载荷规划和应急处置规划等。
其中,任务分配和航迹规划是关键技术。
任务分配的评价指标主要有任务均衡、飞行距离、消耗成本和毁伤代价等。
任务分配需要遵循的原则是分配给无人机的任务要和无人机上的载荷相匹配,任务分配要保证任务均衡,尽量避免出现大量无人机“空闲”的情况。
1任务分配模型多无人机任务分配典型模型有多旅行商模型、车辆路径模型和混合整数线性规划模型。
这些模型相对简单,并且研究成熟,能用于表示一些简单的任务规划问题,任务分配如图1所示。
多旅行商模型映射到多无人机任务分配中,就是让无人机从各自起点出发,分别走一段路到达分配的一个或多个目标任务点,保证最终每个目标任务点有且仅只有一个无人机经过,无人机再返回到自身起点,使得总路径最短[1]。
车辆路径模型映射到多无人机任务分配问题上,无人机相当于配送中心,任务目标点相当于客户点。
多个配送中心对应多个无人机,决定客户点由哪个配送中心服务相当于决定任务由哪个无人机执行。
规划出合理的分配方式以及路径,使得收益最大化。
混合整数线性规划模型就是指拟合的目标函数是线性的,所有的约束也是线性的,同时部分求解的决策变量必须是整数。
映射到多无人机任务分配上,就是要合理分配任务给每一个无人机,在满足各约束的情况下,使得任务效益函数值最大。
常用求解方法有图解法、匈牙利法和分支定界法等。
图1任务分配示意2任务分配方法多无人机任务分配方法根据是否有控制中心分为集中式方法、分布式方法以及二者相结合的分层次分布式方法。
2.1集中式方法集中式任务分配方法由一个地面站或者中心无人机为每个无人机生成任务序列,通过通信链路将规划结果传递到各无人机上,基于地面站控制的多无人机任务分配如图2所示。
多架无人机的协同攻击航路规划
第3 6卷
第 5期
航 空 计 算 技 术
A r n u i a o u i g T c n q e e o a t lC mp t e h iu c n
V 13 o 5 o. 6 N .
Sp 20 e .0 6
20 0 6年 9月
O
o o U o O
O O o o n
O
f
建好 V r o 图后 , o ni o 接着需要确定每一条边的代价
( ) 权 。这里的代价 主要包括威胁 代价和燃 油( 航程 ) 代价, 可表示为下式 :
J :k J +( 一 ) 1 k ( ≤1 0≤ ) () 1
针 方 向分别 编 为 U V 、A/ U V 。 A 1U I A 3 2、
2 航路 规 划
2 1 进 入 航路 的初 步规 划 .
目标问题提出了一种航路规划方法 。
进 行无 人机 初始 进入 航路 规划 的第 一步 是建 立 雷
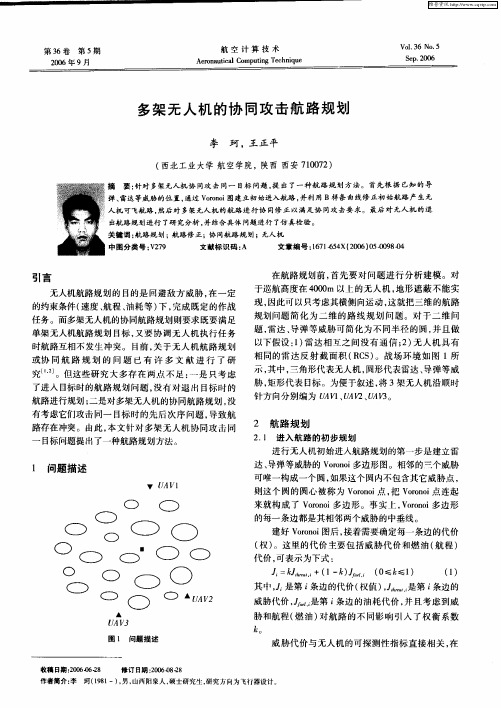
1 问题描述
v UAV 1
达、 导弹等威胁的 V r o 多边形图。相邻的 个威胁 o ni o 可 唯一构 成 一个 圆 , 如果这 个 网 内不 包 含其 它威 胁 点 ,
多架 无 人 机 的协 同攻 击 航 路 规 划
李 珂, 王正平
( 西北工业大学 航空学院, 陕西 西安 707 ) 10 2
摘 要: 针对 多架无人机协 同攻 击 同一 l标 问题 , 出 了一 种航 路 规 划 方法。首 先根 据 已知 的导 ! l 提
弹、 雷达等威胁的位置 , 通过 V rn i o o 图建立初始进入航路 , o 并利 用 B样条 曲线修 正初 始航路 产生无
基于Dubins路径的无人机避障规划算法
无人机 起 始 点 坐 标;vs 为 无 人 机 起 始 速 度 向 量;
Pf(xf,yf)为 无 人 机 终 点 坐 标;vf 为 无 人 机 终 点
向量.
1.2 单障碍环境下避障路径规划模型
在单障碍环境下避障路径规划问题的求解可以
归纳为下面这个问题:
在已知无人 机 出 发 点 Ps(xs,ys)、初 始 速 度 向 量vs,终点 Pf(xf,yf),终点速度向量vf,最小转弯半 径 R 和障碍圆模型D 的位置情况下,求解从Ps(xs, ys)到 Pf(xf,yf)点,满 足 无 人 机 飞 行 最 小 转 弯 半 径 约束的可避开障碍的安全最短飞行路径.
1.1 模型假设与符号说明
为 方 便 计 算 ,本 文 将 障 碍 抽 象 为 圆 形 模 型 ,即 以
障碍是以其中心点 为 圆 心 的 圆 形 区 域,障 碍 区 域 半
径 RD 为
RD = max(R,RO),
(1)
式中:R 为无人 机 最 小 转 弯 半 径;RO 为 障 碍 物 最 远
端 到 中 心 点 距 离 .采 用 如 下 符 号 定 义 :Ps(xs,ys)为
第6期
关震宇等:基于 Dubins路径的无人机避障规划算法
571
的航路规 划 可 以 更 加 接 近 真 正 的 飞 行 过 程.英 国 Cranfield 大学的 Shanmugavel等 采 [9] 用 Dubins 曲 线方法实现了多无 人 机 协 同 航 路 的 规 划,用 欧 几 里 得和微分几何的方法计算 Dubins路径,但并未对于 该路径在 障 碍 情 况 下 的 获 取 进 行 研 究.Florida 大 学的JosephJ.Kehoe[10]采 用 微 分 方 程 的 方 法 获 得 了离散的 Dubins路径,并采用随机搜索树算法对无 人机避障问题进行 了 研 究,但 是 其 获 得 是 一 系 列 的 路点而不是 连 续 的 Dubins路 径.本 文 首 先 分 析 了 在单障碍情况下 Dubins路径的形态与计算方法,之 后将多障碍避障问 题 抽 象 为 一 个 最 短 路 问 题,并 使 用 遗 传 算 法 加 以 解 决 ,最 后 在 多 障 碍 避 障 的 基 础 上 , 通 过 改 进 模 型 ,解 决 了 无 人 机 实 时 避 障 的 问 题 .
基于Dubins曲线的局部路径规划方法研究

基于Dubins曲线的局部路径规划方法研究李胜琴;闫祥伟【期刊名称】《森林工程》【年(卷),期】2022(38)4【摘要】针对矿区中自动驾驶车辆在采掘面与排土场作业场景下的局部路径规划问题,提出基于Dubins曲线的无人驾驶车辆无碰撞、平滑的局部路径规划方法。
首先针对矿区场景,基于Dubins曲线,提出路径规划及车辆轨迹点求解方法,得到一组局部路径。
然后在满足车辆运动学约束的条件下,基于车辆自行车模型,建立车辆可行域,结合分离轴理论,设计碰撞检测算法实时检测Dubins曲线路径,快速筛选出无碰撞轨迹。
设计评价函数H,通过比较曲线的评价函数值,最终得到损失值最小的路径。
采用B样条曲线平滑,即可得到一条最优的局部路径。
在仿真软件中,设置特定场景,对所提出的路径规划方法进行仿真试验。
结果表明,该方法所规划的局部路径能够满足车辆运动学约束,同时设计函数H值达到158.7,路径最短且平滑。
该文所提的局部路径规划方法,对解决矿区采掘面和排土场场景中的局部路径规划问题在实时性与有效性上有显著效果,可以为该场景下的无人驾驶车局部路径规划提供理论和实践依据。
【总页数】8页(P155-162)【作者】李胜琴;闫祥伟【作者单位】东北林业大学交通学院【正文语种】中文【中图分类】S773.9【相关文献】1.基于模糊神经网络的RoboCup足球机器人局部路径规划方法研究2.基于Dubins曲线和改进A*算法的AUV路径规划方法3.一种基于回旋曲线的局部路径规划方法4.基于Dubins曲线和遗传算法的AUV路径规划方法5.基于改进人工势场算法的自主车辆局部路径规划方法研究因版权原因,仅展示原文概要,查看原文内容请购买。
多架无人机协同作战的路径规划
①来自于威胁点的斥力: 迫使链路远离威胁。以
Σj 表示第j 个威胁点的位置, 则z i 点处的威胁斥力F t 为:
N
∑ F t (z i) =
Χi j= 1
Σj ‖Σj -
zi
z i‖5
(4)
②来自于节点之间的拉力: 迫使链路上相邻三
个节点在同一条直线上。 作用于第 i 个节点处的拉 力 F s 为:
通过在低威胁区增加若干定长线段到较短链路中的
做法, 形成等长度的链路, 从而协调了各无人机的航
程, 保证了各无人机同时到达目标。 如图 6 所示。
213 航路的优化
航路规划的最后步骤是链路的光顺优化。 这一
步是保证最终得到的航路是可飞行的, 即航路上的
每一点的曲率半径都大于无人机的转弯半径, 而且
链路上的每一节点尽可能地远离威胁。 链路光顺就
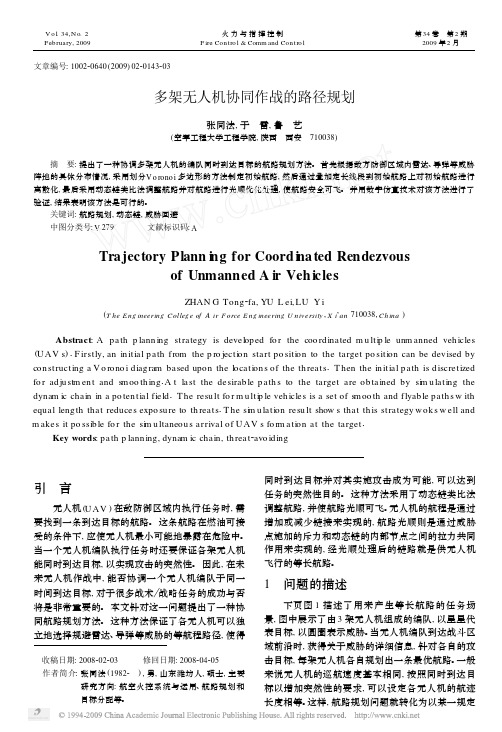
1 问题的描述
下页图 1 描述了用来产生等长航路的任务场 景, 图中展示了由 3 架无人机组成的编队, 以星星代 表目标, 以圆圈表示威胁。 针对各自的攻 击目标, 每架无人机各自规划出一条最优航路。一般 来说无人机的巡航速度基本相同, 按照同时到达目 标以增加突然性的要求, 可以设定各无人机的航迹 长度相等。这样, 航路规划问题就转化为以某一规定
关键词: 航路规划, 动态链, 威胁回避 中图分类号: V 279 文献标识码: A
Tra jectory Plann ing for Coord ina ted Rendezvous of Unmanned A ir Veh icles
ZHAN G Tong2fa, YU L ei, LU Y i
(T he E ng ineering C olleg e of A ir F orce E ng ineering U n iv ersity , X i’an 710038, C h ina )
基于Dubins曲线的无人直升机轨迹规划
a lz ndcac l t het x d p nt rm ut age xe i tfi ht i son a s ore t i tpah i o nd i heago ih . nay e a lu aet wo f e oi litr toft f dpo n g s i , h t s gh t sf u n t l rt m i o hei l m l f
i r p s d a d t ed sg n mp e n ai n o a h p r o ea g rt m r r s n e . B s g t e Du i s c r e p i cp e t sp o o e , n h e i n a d i l me tto fe c a t f h l o i t h a ep e e t d y u i h b n u v r il o n n
Ac o d n o mu t a ib e n n i e ra d s o g c u l g fa u e f n n e ei o trs se c r i g t l v ra l , o l a n t n o p i e t r so ma n d h l p e y t m, a f g tc n r le sd sg e y i n r n u c i h o to lri e in d b l u i gc s a eP D  ̄o . An ep su ea dp s i no u ma n dh l o t r y tm a ec re t db e I c n r l r T e e y s a c d I me d n dt o t r n o i o f n n e ei p e se c n b o r c e y t D o to l . h r b h t c s h P e
无人机技术的多目标路径规划方法及效果评估研究
无人机技术的多目标路径规划方法及效果评估研究摘要:无人机技术的快速发展使其在多个领域具有广泛的应用前景。
多目标路径规划是无人机技术中的一个重要问题,涉及到如何高效地规划无人机的飞行路线,以实现多个目标的最优性。
本文将介绍无人机技术中多目标路径规划的常用方法,并根据这些方法对其效果进行评估和比较。
通过对不同方法的研究和分析,可以为无人机路径规划算法的改进和优化提供参考。
1. 引言随着无人机技术的迅猛发展,无人机在农业、环境监测、物流配送等领域的应用正在不断扩大。
而多目标路径规划作为无人机技术的重要组成部分,对于无人机的飞行路线规划至关重要。
本文将从以下几个方面对多目标路径规划方法进行研究和评估。
2. 多目标路径规划方法2.1 图搜索算法图搜索算法是一种常见的多目标路径规划方法。
其中,A*算法是一种经典的图搜索算法,可用于解决无人机路径规划问题。
A*算法采用启发式函数来评估路径,在保证最短路径的基础上,实现多目标的规划。
然而,A*算法在应对大规模的路径规划问题时,存在时间复杂度高、计算量大的问题。
2.2 遗传算法遗传算法是一种模拟自然进化过程的优化算法,被广泛应用于多目标路径规划中。
遗传算法通过随机生成初始解,结合选择、交叉和变异等操作,不断优化路径规划结果。
遗传算法具有全局搜索能力和适应性优化能力,但在时间复杂度方面相对较高。
2.3 蚁群算法蚁群算法是一种模拟蚁群觅食行为的优化算法,被应用于无人机多目标路径规划。
在蚁群算法中,蚁群通过释放信息素和选择最优路径来实现多目标规划。
蚁群算法具有强大的搜索能力和适应性,且计算量相对较小,但其在处理大规模路径规划问题时可能出现收敛速度慢的问题。
3. 多目标路径规划效果评估3.1 路径长度路径长度是评估路径规划效果的一个重要指标。
通常情况下,较短的路径长度表示更高效的飞行路线规划。
通过比较不同方法得到的路径长度,可以评估各方法在多目标路径规划问题上的优劣。
3.2 能耗能耗是无人机飞行过程中的重要指标,也是评估路径规划效果的一个关键因素。
dubins曲线和多项式曲线
Dubins曲线和多项式曲线1. 引言Dubins曲线和多项式曲线是在数学和计算机科学领域中常用的曲线模型。
Dubins 曲线是一种特殊的最短路径曲线,用于描述无人机或其他机器人在给定起点和终点之间的路径规划问题。
多项式曲线则是一种常见的曲线拟合方法,用于在给定一组数据点时,找到最适合这些数据点的曲线。
在本文中,我们将深入探讨Dubins曲线和多项式曲线的原理、应用和优缺点,并比较它们在不同场景下的适用性。
2. Dubins曲线2.1 原理Dubins曲线是由美国数学家L. E. Dubins于1957年提出的,用于描述无人机或其他机器人在平面上的最短路径。
Dubins曲线由一系列的圆弧和直线段组成,起点和终点之间的路径长度最短,并满足特定的转弯半径限制。
具体而言,Dubins曲线一般由三个部分组成:R-L-R、L-R-L和R-L-L或L-R-R。
其中,R表示右转弯,L表示左转弯。
Dubins曲线的生成算法涉及到对转弯半径、起点和终点之间的角度差等参数的计算。
2.2 应用Dubins曲线在航空、无人机、机器人等领域有广泛的应用。
例如,无人机在进行目标搜索、路径规划和避障等任务时,可以利用Dubins曲线来规划最短路径。
Dubins曲线还可以应用于机器人的自动导航、车辆的行驶路径规划等领域。
2.3 优缺点Dubins曲线的主要优点是能够找到起点和终点之间的最短路径,并且具有良好的可行性。
此外,Dubins曲线的计算方法相对简单,容易实现。
然而,Dubins曲线也存在一些缺点。
首先,Dubins曲线只适用于平面上的路径规划问题,对于三维空间中的路径规划则不适用。
其次,Dubins曲线的生成算法可能会涉及到复杂的数学计算,对计算资源要求较高。
最后,Dubins曲线在某些情况下可能会产生过大的曲率,导致路径的可行性降低。
3. 多项式曲线3.1 原理多项式曲线是一种常见的曲线拟合方法,用于在给定一组数据点时,找到最适合这些数据点的曲线。
基于Dubins路径的A^*算法的多无人机路径规划
摘 要:以两架固定翼无人机在 同高度 、有 障碍 物环 境下的路 径规划为应用 背景 ,针对传 统基 于网格 的 A 搜 索算法 没有考虑 飞行性 能约束的问题 ,首 先利 用 Dubins曲线找到有 效节点 ,结合 A 启发式搜 索的思 想,分别 为每 架无人机 离 线 构 建 由 Dubins曲线 组 成 的 最短 避 障路 径 ;在 两机 同 高度 飞行 过 程 中 ,通 过 相 对 运 动 关 系判 断 是 否 碰 撞 ,使 用 “向 量共享”解得航 向改 变量 以及在线路径 重规 划 ,得到 两机 的防撞避 障路 径。仿 真表 明,与传 统 A 搜 索相 比,此算法可 更 快 地 得 到 更 短 的 连 续 安 全 路 径 ;通过 在 线 重 规 划 ,可 以得 到 两 机 的 防撞 避 障路 径 。 关键 词 :UAV;航 迹 规 划 ;Dubins曲 线 ;A 搜 索 ;防 撞 ;避 障 中 图 分 类 号 :V279 文 献 标 志 码 :A doi:10.3969/j.issn.1671—637X.2018.11.005
UAV path planning by Dubins—path based A "algorithm[J].Electronics Optics&Control,2018,25(1 1):25·29.
基 于 Dubins路 径 的 A 算 法 的 多无 人 机 路 径 规 划
宋雪倩 , 胡士 强
飞行性 能约束。对于 固定翼无 人机 ,它们不 能像旋翼 机一样悬 停 ,必须保持最小速度 ,且转弯受到最小转 弯 半 径的限制。
A 算法 是路径 规划 中最 著名 的离散 搜索 算 法 之 一。通 常先将 二维平 面进行栅格化 ,再使用 A 算 法 或改进 A 算法 进行最 短路径 搜索 。j。这 在规划 时 没有 考虑飞行 器的始末航 向要 求 ,得 到的路径 不能满 足飞行性 能约束且会对一些不必要节点进行搜索 。文 献 [4—5]都使用 了 A 算 法进行 移动机器人 的路径 规 划 ,都是在规 划完成之 后 ,对路径 进行光滑 处理 ,其 中 涉 及较大 计算 量且 无 法保 证光 滑之 后 的路 径依 旧 安 全 ;文献 [6]考 虑 了飞行 性 能 限制 ,利 用 可视 图法 与 Dijkstra算 法 ,但 仍 需 要 较 长 计 算 时 间 ;而 Dubins路
使用Dubins路径和回旋曲线进行多个无人机的路径规划讲解

使用Dubins路径和回旋曲线进行多个无人机的路径规划摘要:本文讲述了对一群无人机进行路径规划的方法。
进行这样研究要解决如何使一批无人机同时到达目标的问题。
制定可以路径(适航、安全的路径)称为路径规划,它分为三个阶段。
第一阶段使规划适航路径,第二阶段通过添加额外的约束规划安全的路径,使无人机不与其他无人机或者已知的障碍碰撞,第三阶段对路径进行规划是无人机同时到达目标。
在第一阶段,每个无人机都使用Dubins路径和回旋曲线进行路径规划,这些路径是通过微分几何原理完成的。
第二阶段为这些路径添加安全约束:(一)无人机间保持最小间距,(二)规划相同长度的非交叉路径,(三)飞过中间的航线点/形状,使这些路径更安全。
第三阶段,所有路径长度相等使无人机可以同时到达目标。
一些模拟仿真结果证实了这一技术。
1、介绍在许多应用程序中自动控制取代了人类操作,像军事系统中存在危害人类因素的地方、处理有害物质、灾难管理、监视侦察等单调的操作。
需要开发自动控制系统来更换这些系统中的人类操作员,这样的自动控制系统在水陆空各种环境中都有。
在无人机的研究中,水陆空等因素是作为一个集体进行研究的。
无人机在军事和民用领域都有广阔的应用前景,因此有许多关于无人机的学术或商业性质的研究。
廉价电子产品的飞速发展使得无人机更加实用。
大自然中成群的鸟和鱼给了人们灵感,联合控制是自动控制中的一个活跃的研究方向。
雇佣一批无人机可以产生成本效益和容错系统。
从一个地方飞到另一个地方并作为一个移动传感平台进行监视或跟踪是无人机的一个功能,实现这个功能需要为无人机提供一个合适的安全路径。
路径规划是任务规划的一个分支,图1是任务规划的典型功能体系结构。
图1有三个分支,分支的数量和功能会根据应用程序和任务目标的不同而改变。
第一层分支的任务是跟踪目标,基于这些目标,这层为无人机分配任务和资源并且充当决策者。
第二层为无人机规划路径和轨迹,这一层用路径规划和相关的算法(如避免碰撞)规划可行的轨迹/路径。
基于dubins的最优航迹规划方法与火力筹划若干问题研究
摘要航迹规划作为无人飞行器领域的核心技术被国内外学者深入研究,然而由于性能约束的复杂性及任务的多样性,任何航迹规划算法都存在适应性问题。
同时现代战争中攻击型无人飞行器种类多,功能差异较大,制定作战计划难度大,在军事运筹领域,有关战术级火力筹划的研究成果较少。
本文针对特定无人飞行器提出了一种计算速度较快且搜索结果最优的规划算法,并对战术级火力筹划问题进行了较为深入的研究,结合主要问题设计了火力筹划流程。
所研究的规划算法已成功应用于实际系统中,对战术级筹划流程进行了完整的仿真实验。
具体研究成果如下:一、推导并证明任意距离下Dubins最短路径,完善了Dubins最短路径理论。
首先简单介绍了二维平面内的Dubins数学模型以及两点距离较长时Dubins最短路径的推导方法;讨论了该方法中存在的不足之处,推导并证明了在前后两点距离任意短时Dubins最短路径新结论,试验验证了结论的正确性。
二、提出了一种结合Dubins最短路径的遗传算法寻找当前最优转弯角度。
首先根据基于矢量的航迹规划算法中转弯点的扩展方式,建立该算法的基本转弯模型;然后针对因转弯角度为区间而无法确定当前最优转弯方向的问题,给出基于转弯角度的优化模型,并采用遗传算法求解该模型。
三、针对基于矢量的规划算法中存在的绕弯等问题,本文提出了一种基于矢量的改进规划算法。
将基于矢量的规划算法,A*算法以及改进算法进行比较,试验验证了改进算法既能解决原算法中存在的问题,计算时间也能满足实际需求。
四、针对火力筹划若干问题进行深入研究并形成主要筹划流程,对流程合理性进行验证。
采用分层递阶的思想对火力筹划系统流程进行研究;从概率的角度建立毁伤模型对目标进行毁伤计算;结合作战实际情况提出带约束的遗传算法对阵地筹划模型进行求解;使用本文所研究的规划算法生成可行航迹;针对复杂的协同规划问题提出管道模型,时间优化模型,航迹修正模型等;最后对系统进行实验验证。
关键词:Dubins最短路径;最优转弯方向;航迹规划;火力筹划AbstractAs the core technology of unmanned aerial vehicle (UA V), route planning has been deeply studied by scholars at home and abroad, however, any route planning algorithm still have some adaptation problems due to performance constraints and task complexity. There are many kinds of attack unmanned aerial vehicles with complex functions in modern warfare, it is very difficult to make the military campaign in actual combat. In the field of military operations field, the research results about tactical planning are less. Thus it is of great significance to propose a fast and optimal route planning algorithm, and a deep research on tactical level planning has studied in this dissertation, eventually a kind of fire planning process with the main problems is proposed. The route planning algorithm has been used in actual system, many simulation experiments about planning process have been conducted. The research results of this dissertation are described as follows: First, the shortest path in any distance based on Dubins method is derived and proved, and the shortest path theory of Dubins is improved. The Dubins mathematical model in 2D plane is introduced and the derivation method of Dubins shortest path method with longer distance between two points is described in detail. Then the deficiencies in the method are discussed, and the Dubins shortest path results with arbitrary distance between two adjacent points is deduced and proved, eventually the test results further verify the accuracy of the conclusion.Second, the algorithm fusion with a genetic algorithm and Dubins shortest path is proposed to find the optimal turning angle. The basic turn model of the algorithm is constructed according to the extension way of turning point in trajectory planning algorithm based on vector. Then, to solve the problem that the current optimal turning direction cannot be determined, the optimal model based on turning angle is established, and the genetic algorithm is used to solve the model.Third, for the bending problem in the original trajectory planning algorithm based on vector, the improved path planning algorithm based on vector is proposed in this dissertation. The original path planning algorithm based on vector, A* algorithm and our proposed algorithm were compared in the experiment, and the results shown that theimproved algorithm can not only solve the problems existing in the original algorithm, but also have shorter computation time.Fourth, To verify the rationality of the process, this paper makes a deep research and forms the main planning process on the fire planning. The hierarchical theory is adopted to research the fire planning system process. The damage model is established to calculate the damage degree of the target from the angle of probability calculation. Combined with the actual situation of combat, a genetic algorithm with constraints is proposed to solve the problem of position planning model. Then the improved route planning algorithm is adopted to produce the feasible trajectory, thereafter the pipeline model, the time optimization model and trajectory correction model are proposed to solve the complex collaborative planning problems. Finally the experimental verification is conducted to the system.Key words:Dubins shortest path; Optimal turning direction; Route Planning; Fire planning目 录摘要 (I)Abstract .......................................................................................................... I I 第一章绪论 (1)1.1 研究背景与意义 (1)1.2 国内外研究现状 (2)1.2.1 航迹规划研究现状 (2)1.2.2 Dubins路径研究现状 (4)1.2.3 火力筹划系统研究现状 (5)1.3 研究内容与文章结构 (6)1.3.1 研究内容 (6)1.3.2 文章结构 (7)第二章任意距离下的Dubins最短路径推导 (8)2.1 Dubins路径模型 (8)2.2 长距离条件下Dubins最短路径[33] (11)2.3 Dubins最短路径拓展 (15)2.4.1 Dubins路径长度基础求解方法 (16)2.4.2 预备知识 (19)2.4.3 推导及证明 (21)2.4 实验结果 (30)2.5 本章小结 (35)第三章基于Dubins的最优转弯角度确定 (36)3.1 问题描述 (36)3.2 解决方法 (38)3.3 实验与结果分析 (42)3.4 本章小结 (42)第四章结合Dubins最短路径的航迹规划算法 (43)4.1 基于矢量的航迹规划算法 (43)4.1.1 规划空间 (43)4.1.2 规划约束 (44)4.1.3 模型描述 (45)4.1.4 节点扩展 (46)4.2 算法问题分析与改进 (47)4.2.1 算法问题分析 (47)4.2.2 算法改进 (50)4.2.3 算法流程 (51)4.2.4 实验结果与分析 (53)4.3 本章小结 (60)第五章火力筹划主要问题研究 (61)5.1 毁伤分析 (61)5.1.1 毁伤模型 (62)5.1.2 实验结果 (63)5.2 阵地筹划 (64)5.2.1 阵地筹划模型 (65)5.2.2 基于约束条件的遗传算法 (66)5.2.3 实验结果 (72)5.3 协同规划 (73)5.3.1 管道模型 (74)5.3.2 时间优化模型 (76)5.3.3 结合Dubins的航迹修正模型 (77)5.4 火力筹划 (78)5.4.1 火力筹划流程 (78)5.4.2 实验结果 (79)5.5 本章小结 (85)第六章总结与展望 (87)6.1 本文的研究成果 (87)6.2 研究展望 (87)致谢 (89)参考文献 (90)附录1 攻读硕士学位期间发表的论文 (93)第一章绪论1.1 研究背景与意义随着人工智能的迅猛发展,现代飞行器技术发生巨大变化。
dubins曲线python
Dubins曲线1. 简介Dubins曲线是一种特殊的最短路径曲线,用于描述一个刚体在平面上从一个点到另一个点的运动路径。
Dubins曲线的特点是它由连续的直线段和最多两个切线圆弧组成,因此它是一种光滑的路径。
Dubins曲线最早由美国数学家Lester Dubins于1957年提出,其应用广泛,包括航空航天、机器人路径规划、自动驾驶等领域。
在本文中,我们将使用Python实现Dubins曲线,并探讨其原理和应用。
2. Dubins曲线的构成Dubins曲线由三个基本元素组成:直线段、左转弧线和右转弧线。
这些元素可以按照不同的顺序组合,形成六种不同的Dubins曲线类型。
以下是六种Dubins曲线类型的简要描述:1.LSL:先向左转,再直线行驶,最后向左转。
2.LSR:先向左转,再直线行驶,最后向右转。
3.RSL:先向右转,再直线行驶,最后向左转。
4.RSR:先向右转,再直线行驶,最后向右转。
5.LRL:先向左转,再向右转,最后向左转。
6.RLR:先向右转,再向左转,最后向右转。
3. Dubins曲线的生成算法Dubins曲线的生成算法可以分为两个步骤:找到最短路径类型和计算路径参数。
首先,我们需要确定两个点之间的最短路径类型。
这可以通过计算两个点之间的欧几里得距离和方向角之差来完成。
根据这些信息,我们可以确定最短路径类型。
然后,我们需要计算Dubins曲线的路径参数。
路径参数包括转弯半径、转弯角度和直线段长度。
这些参数可以通过一系列几何计算得出。
4. Python实现下面是一个使用Python实现Dubins曲线的示例代码:import mathclass DubinsCurve:def __init__(self, start, end, radius):self.start = startself.end = endself.radius = radiusdef generate(self):# 计算路径类型type = self.calculate_type()# 计算路径参数params = self.calculate_params(type)# 生成Dubins曲线路径path = self.generate_path(type, params)return pathdef calculate_type(self):# 计算两个点之间的欧几里得距离和方向角之差distance = math.sqrt((self.end[0] - self.start[0])**2 + (self.end[1] - self.start[1])**2)angle_diff = math.atan2(self.end[1] - self.start[1], self.end[0] - sel f.start[0]) - self.start[2]# 根据距离和方向角之差确定最短路径类型if angle_diff > math.pi:angle_diff -= 2*math.pielif angle_diff < -math.pi:angle_diff += 2*math.piif angle_diff > 0:if distance < self.radius * (2 + angle_diff / math.pi):return 'LSL'else:return 'LSR'else:if distance < self.radius * (2 - angle_diff / math.pi):return 'RSR'else:return 'RSL'def calculate_params(self, type):# 根据最短路径类型计算路径参数params = {}if type == 'LSL':params['turning_radius'] = self.radiusparams['turning_angle'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - self.start[2]params['straight_length'] = math.sqrt((self.end[0] - self.start[0]) **2 + (self.end[1] - self.start[1])**2) - params['turning_radius'] * (params[' turning_angle'] / math.pi)elif type == 'LSR':params['turning_radius'] = self.radiusparams['turning_angle'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - self.start[2]params['straight_length'] = math.sqrt((self.end[0] - self.start[0]) **2 + (self.end[1] - self.start[1])**2) - params['turning_radius'] * (params[' turning_angle'] / math.pi)elif type == 'RSL':params['turning_radius'] = self.radiusparams['turning_angle'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - self.start[2]params['straight_length'] = math.sqrt((self.end[0] - self.start[0]) **2 + (self.end[1] - self.start[1])**2) - params['turning_radius'] * (params[' turning_angle'] / math.pi)elif type == 'RSR':params['turning_radius'] = self.radiusparams['turning_angle'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - self.start[2]params['straight_length'] = math.sqrt((self.end[0] - self.start[0]) **2 + (self.end[1] - self.start[1])**2) - params['turning_radius'] * (params[' turning_angle'] / math.pi)elif type == 'LRL':params['turning_radius'] = self.radiusparams['turning_angle1'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - self.start[2]params['turning_angle2'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - (self.start[2] + params['turning_angle1'])params['straight_length'] = math.sqrt((self.end[0] - self.start[0]) **2 + (self.end[1] - self.start[1])**2) - params['turning_radius'] * (params[' turning_angle1'] / math.pi) - params['turning_radius'] * (params['turning_angl e2'] / math.pi)elif type == 'RLR':params['turning_radius'] = self.radiusparams['turning_angle1'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - self.start[2]params['turning_angle2'] = math.atan2(self.end[1] - self.start[1], self.end[0] - self.start[0]) - (self.start[2] + params['turning_angle1'])params['straight_length'] = math.sqrt((self.end[0] - self.start[0]) **2 + (self.end[1] - self.start[1])**2) - params['turning_radius'] * (params[' turning_angle1'] / math.pi) - params['turning_radius'] * (params['turning_angl e2'] / math.pi)return paramsdef generate_path(self, type, params):# 根据最短路径类型和路径参数生成Dubins曲线路径path = []if type == 'LSL':path.append(('turn_left', params['turning_radius'], params['turnin g_angle']))path.append(('straight', params['straight_length']))path.append(('turn_left', params['turning_radius'], -params['turni ng_angle']))elif type == 'LSR':path.append(('turn_left', params['turning_radius'], params['turnin g_angle']))path.append(('straight', params['straight_length']))path.append(('turn_right', params['turning_radius'], -params['turn ing_angle']))elif type == 'RSL':path.append(('turn_right', params['turning_radius'], -params['turn ing_angle']))path.append(('straight', params['straight_length']))path.append(('turn_left', params['turning_radius'], params['turnin g_angle']))elif type == 'RSR':path.append(('turn_right', params['turning_radius'], -params['turn ing_angle']))path.append(('straight', params['straight_length']))path.append(('turn_right', params['turning_radius'], params['turni ng_angle']))elif type == 'LRL':path.append(('turn_left', params['turning_radius'], params['turnin g_angle1']))path.append(('turn_right', params['turning_radius'], params['turni ng_angle2']))path.append(('turn_left', params['turning_radius'], -params['turni ng_angle1']))elif type == 'RLR':path.append(('turn_right', params['turning_radius'], -params['turn ing_angle1']))path.append(('turn_left', params['turning_radius'], -params['turni ng_angle2']))path.append(('turn_right', params['turning_radius'], params['turni ng_angle1']))return path# 示例用法start = (0, 0, 0)end = (1, 1, math.pi/2)radius = 1.0curve = DubinsCurve(start, end, radius)path = curve.generate()for segment in path:if segment[0] == 'turn_left':print(f'Turn left with radius {segment[1]} for angle {segment[2]}') elif segment[0] == 'turn_right':print(f'Turn right with radius {segment[1]} for angle {segment[2]}') elif segment[0] == 'straight':print(f'Straight for length {segment[1]}')5. 应用示例Dubins曲线在路径规划和导航中有广泛的应用。
多无人机3D侦察路径规划
YG P'(,"#A#QSG T<7(cB("#A#QSG V7(,"#A#dSIR<B7+9<B7+"#A#4YUM N+7(%+("#A
$>JX7B44/4234CCW-*7,;*4-,-(K-24+C,;*4-8-5*+*-5#3B4-5Z*-59-*:0+.*;<42 H4.;.,-( M0/074CCW-*7,;*4-.#3B4-5Z*-5A???[@#3B*-,(VJ\0<E,%42 !4%*/034CCW-*7,;*4-M07B-4/45<#
第 C" 卷 ! 第 ! 期
系统工程与电子技术
O-&3C"!M-3!
A?"1 年 ! 月
R.9;'59U(,+(''8+(,7()U&'>;8-(+>9
WB&.A?"1
""""""""""""""""""""""""""""""""""""""""""""""""""
文 章 编 号 "??"=#?\d$A?"1%?!="##"=?1!
考虑速度约束的无人机Dubins路径规划
考虑速度约束的无人机Dubins路径规划
刘流;梁晓龙;何吕龙;朱创创
【期刊名称】《火力与指挥控制》
【年(卷),期】2018(043)012
【摘要】针对目前关于Dubins路径的研究未考虑速度约束的情况,根据Dubins 路径的特点,提出了速度控制算法实现无人机对Dubins路径的有效跟踪.首先为无人机生成满足要求的Dubins路径,随后采用速度控制方法对无人机跟踪Dubins路径进行控制,并通过设置虚拟位姿点的方法,使无人机完成速度大小的调整,以期望速度大小到达任务点,实现了无人机在路程、速度约束条件下的运动控制.最后利用四旋翼无人机平台进行了飞行验证,实验及仿真结果表明了该方法简便可行,易于实现.【总页数】6页(P50-54,58)
【作者】刘流;梁晓龙;何吕龙;朱创创
【作者单位】空军工程大学空管领航学院,西安710051;空军工程大学空管领航学院,西安710051;空军工程大学空管领航学院,西安710051;空军工程大学空管领航学院,西安710051
【正文语种】中文
【中图分类】V271.4
【相关文献】
1.考虑空间约束的机库舰载机调运路径规划方法 [J], 刘亚杰;李忠猛;陈晓山
2.考虑避碰约束的编队卫星入网路径规划 [J], 黄河;周军;刘莹莹
3.基于Dubins路径的A∗算法的多无人机路径规划 [J], 宋雪倩;胡士强
4.一种考虑转弯约束的改进A*算法在机场滑行道路径规划中的应用研究 [J], 文欢;郭建东;张博;韩金池;江广顺;王揽月;周世桢;胡周刁
5.一种考虑复杂约束的线缆束路径规划方法 [J], 杨旭;周德俭;宋微;陈小勇
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用Dubins路径和回旋曲线进行多个无人机的路径规划摘要:本文讲述了对一群无人机进行路径规划的方法。
进行这样研究要解决如何使一批无人机同时到达目标的问题。
制定可以路径(适航、安全的路径)称为路径规划,它分为三个阶段。
第一阶段使规划适航路径,第二阶段通过添加额外的约束规划安全的路径,使无人机不与其他无人机或者已知的障碍碰撞,第三阶段对路径进行规划是无人机同时到达目标。
在第一阶段,每个无人机都使用Dubins路径和回旋曲线进行路径规划,这些路径是通过微分几何原理完成的。
第二阶段为这些路径添加安全约束:(一)无人机间保持最小间距,(二)规划相同长度的非交叉路径,(三)飞过中间的航线点/形状,使这些路径更安全。
第三阶段,所有路径长度相等使无人机可以同时到达目标。
一些模拟仿真结果证实了这一技术。
1、介绍在许多应用程序中自动控制取代了人类操作,像军事系统中存在危害人类因素的地方、处理有害物质、灾难管理、监视侦察等单调的操作。
需要开发自动控制系统来更换这些系统中的人类操作员,这样的自动控制系统在水陆空各种环境中都有。
在无人机的研究中,水陆空等因素是作为一个集体进行研究的。
无人机在军事和民用领域都有广阔的应用前景,因此有许多关于无人机的学术或商业性质的研究。
廉价电子产品的飞速发展使得无人机更加实用。
大自然中成群的鸟和鱼给了人们灵感,联合控制是自动控制中的一个活跃的研究方向。
雇佣一批无人机可以产生成本效益和容错系统。
从一个地方飞到另一个地方并作为一个移动传感平台进行监视或跟踪是无人机的一个功能,实现这个功能需要为无人机提供一个合适的安全路径。
路径规划是任务规划的一个分支,图1是任务规划的典型功能体系结构。
图1有三个分支,分支的数量和功能会根据应用程序和任务目标的不同而改变。
第一层分支的任务是跟踪目标,基于这些目标,这层为无人机分配任务和资源并且充当决策者。
第二层为无人机规划路径和轨迹,这一层用路径规划和相关的算法(如避免碰撞)规划可行的轨迹/路径。
第三层进行指导和控制,保证无人机在第二层规划的轨迹上飞行。
本文着重于第二层的研究,在第二层,路径规划产生的轨迹使一群无人机同时到达指定位置。
在自动控制系统领域,路径规划仍然是一个公开的问题。
路径规划是在两个或多个点之间规划出一条或多条路径,通常这些点是在存储地图上指定的。
路径规划是一个复杂的问题,它需要满足操作环境和其他作战需求等物理约束,其中最重要的约束是路径必须是可以飞行的,无人机的适航路径必须满足运动学约束以确保无人机运动在操纵曲率的最高界限。
图1任务规划的层次结构操纵曲率与无人机的横向加速度成正比(a=kvv)(a是横向加速度,k是曲率,v是无人机的速度),无人机路径上所有点的曲率必须小于最大曲率。
因此,路径是否可以飞行是由路径曲率决定的(三维空间中它是由曲率和转矩共同决定的)。
第二个重要约束是安全性。
躲避障碍和其他无人机的能力是衡量路径安全性的主要指标,路径必须保证无人机避免与己方无人机相撞,并且能够灵活的躲避环境障碍带来的威胁。
此外,路径最短、燃料和能源消耗最小等附加约束可以提供更好的性能和效率,本文认为最短路径通常也是最节能路径。
可能还存在维持复杂城市环境中的通信、完成任务的时间、基于任务目标的资源管理等约束。
因此,本文的主题是在存在静态障碍的环境中为一群无人机规划长度相等的安全适航路径,确保无人机同时到达目标。
2、准备工作在近代多架无人机的路径规划的研究非常活跃。
不同的应用领域(监视、搜索和跟踪、救援、灾害监测等)有不同的目标和方法。
目前存在多种解决方案,每一种方案都有自己的优点。
但是随着问题复杂性的增加,我们需要新的解决方案。
大多数的解决方案都可以由一个简化框图(见图2)表示图2 现有方法的路径规划使用这种方法进行路径规划需要输入航迹点、障碍位置和大小、以及相关的不确定因素,通过优化技术将这些数据进行路径规划。
这些解决方案没有固定的曲率约束,因此,产生的路径通常是多边形的。
在某些情况下,新规划的路线是可行的,在另一些情况下,要想消除不可飞行的路线产生适航路径,这些路线还需要进一步优化。
从输入数据来规划路线的方法有很多,通过泰森多边形图解法生成的路线是一个定义了一组静态障碍物的地图。
操作时,每次弹出遇到威胁,泰森多边形法都会进行更新。
Mclain和Beard认为,一个连接端点的链模型可以通过定义链连部队减少方向改变进行路径规划。
通过定义一个与障碍物相关的排斥力来劲性路径规划,这些力使路径在遇到障碍物时外形和距离产生巨大变化。
Bortoff使用类似的方法通过定义虚拟部队进行研究。
Judd和McClain提出使用带有轨迹平滑的三次样条函数进行轨迹规划,Chandler、Pachter和Rasmussen主张用弧进行轨迹规划。
Zhang、Wang、Yu还有Shima、Rasmussen、Sparks是假设一个任务中分配多个机器人进行直线轨迹规划,混合整数线性规划等优化技术、进化算法也被应用与无人机的路径规划。
Segovia, Rombaut, Preciado和 Meizel 提出了对路径规划进行全面检查。
有研究表明,这个路径规划是整体的一部分。
Chandler et al提出使用一个指定的应用程序进行轨迹协调规划。
Zabarankin,Uryasev,Pardalos提出使用离散化的分析优化方法满足路径长度约束规划出一条避免被雷达发现的最优路径。
Eagle和Yee认为可以把路径规划问题看做是在分隔开的单元格内进行搜索的问题。
Boreoff的研究中可以看到使用图表、最优控制、势场方法进行躲避敌方雷达的路径规划的比较结果。
Shanmu- gavel, Tsourdos, Z˙bikowski, White, Rabbath和 Lechevin使用参数曲线进行路径规划。
Shanmugavel, Tsourdos, Z˙bikowski, White 和 Shanmugavel, Tsourdos, Z˙bikowski, White使用Dubins路径进行路径规划。
本文介绍了一种新的路径规划方法(见图3),这种方法使用适航路径进行路径规划。
图3路径规划的新方法适航路径的第一步规划分别与航迹点和航迹形状相关,由此规划出的轨迹是满足无人机运动约束的可行轨迹,随后调整这些路径以产生满足额外安全约束的安全路径,这个适航路径是基于Dubins路径的,但是将设计原理中的圆弧换成回旋曲线。
在机器人应用程序中可以看到早期的回旋曲线。
但是,经过笔者的努力,本文是第一篇使用基于回旋曲线原理的Dubins路径进行路径规划的论文。
本文的主要贡献是使用微分几何原理设计了一个飞行路径并进行了多个无人机的路径规划。
摘要:第三部分讲述了任务目标和仿真,第四部分将阐述路径规划问题的制定,第五部分讲述解决方案和技术参数等细节,第七部分进行适航路径的数学推导,第八部分给出在自由环境和凌乱空间中的仿真结果,最后一部分是本文得出的结论。
3、场景对应的问题见图4.图4.方案:r(1)—航线路径 (x,y,z)—方位坐标一批N架无人机离开基地,它们必须同一时间到达目标区域。
假设每个无人机的开始和结束位置坐标(x,y,z)和方向角(θf,Фf)是先验的。
假设这批无人机的类型相同、飞行速度相同并且飞行在相同的固定高度上。
每个无人机具有相同的最大曲率约束并且环境中有静态障碍物。
这些无人机要像躲避静态障碍物一样躲避其他无人机以及空间中存在的其他障碍。
4、问题公式化考虑一个单独的无人机从基地到目标位置的无约束初步路径规划问题。
起点ps 在基地,终点pf在目标位置,标签r表示路径连接,路径规划产生一个路径把开始位置ps(xs,ys,zs,θs,Фs)和终点位置pf(xf,yf,zf,θf,Фf)连接起来。
t表示路径长度函数。
(θ,Ф)表示取向,红色表示障碍区,i表示第i架无人机或路径。
将公式(1)扩展到N架无人机,每架无人机飞过np个位置点,得到:t代表路径转矩,k代表路径曲率,Kmax是最大曲率,Tmax是最大扭矩,代表安全约束,代表安全长度。
5.2.1—5.2.3部分的长度约束为:如果航线在固定的高度,那么公式(2)可以简化为:使用有曲率约束的二维Dubins方法可以解出公式(1),这表明最短路径可以由三个切向圆弧(CCC)或者两个切向圆弧加一条直线(CLC)得到,其中C代表圆弧,L代表直线。
5、解决方案如果所有无人机的速度相等,可以通过规划长度相等的路径来实现同时到达,这可以通过解公式(5)和一个额外的路径约束:sk(t)=sm(t)得到,这样,路径K和路径H的长度是相等的。
随着约束的增加复杂性也增加了,这样就可能得不到一个解决方案,这个问题可以分解为三个阶段:第一阶段为每架无人机规划一条最短路径,第二阶段添加安全约束,第三阶段建立长度相等的飞行路径。
5.1第一阶段:选择适航路径在第一阶段,每架无人机的适航路径都是从开始位置到结束位置相连。
具有连续曲率的最短路径被称为适航路径,它能够满足无人机的最大曲率约束。
在第一种情况下,选择有回旋曲线且有一条直线与两个圆弧相切(CLC)的Dubins 路径。
这条路径的曲率轮廓有两个不连续的点。
因此,回旋曲线在有坡道曲率轮廓的地方取代圆弧,修改之后,过渡弧和线段之间的曲率变的平滑了,图5表示路径及其曲率概要。
图5适航路径以及他们的曲率路径的曲率与横向加速度成正比,连同其他地点、速度、位置形成一个闭环指导系统进行路径跟踪(图1中的第三层)。
路径规划和路径跟踪形成一个闭环反馈,确保无人机能够准确的按照给定的路径飞行。
5.2第二阶段:满足安全约束在第二阶段,要给可以飞行的路径加上安全约束。
这些约束既要考虑已知的障碍,又要避免与其他无人机相撞,假设每个无人机位于它的质量中心有一个安全半径R,这个半径值小于传感器探测范围大于最小曲率半径,这确保无人机能够感知到障碍或者其他无人机,且有足够的机动能力躲避障碍。
两个约束条件:(一)间距最小(二)路径长度相等且非交叉,如图6所示第三个安全约束通过建立中间航迹点/形状来处理弹出的威胁。
这些将在5.2.3节讨论图6安全路径5.2.1最小分离距离任何两个飞行路径之间的距离应该小于一个阙值,这个值称为最小分离距离,在这里是指安全半径的两倍(见图6)。
如果两个路径的安全圈重叠,将会产生碰撞。
为了通过新的航迹基准点/位置或者通过因弧线曲率的改变而改变的轨迹/形状,我们需要重新规划路径。
d k,m代表路径r k(t)和r m(t)之间的距离。
最小分离距离约束是:5.2.2 长度相等的非交叉路径前面的约束条件是针对无人机的直线轨迹,不能解决无人机曲线轨迹的飞行问题。
如果将“最小分离距离”用于曲线路径将会得到错误的结果。