结构振动理论第十讲(习题课)研究
振动习题课 PPT

二、描写谐振动的几个物理量
1. 振幅 A x02 v0 2
2. 初相 cos x0
A
和v0正负确定。
3. 圆频率
弹簧振子
k m
单摆 g
l
周期、频率 T 2 1
三、旋转矢量
物理模型与数学模型比较
谐振动
旋转矢量
A
t+
T
振幅 初相 位相 圆频率 谐振动周期
半径 初始角坐标
角坐标 角速度 圆周运动周期
(1)物体的振动方程(自选坐标系); (2)物体在平衡位置上方 5cm 时弹簧对物体的 拉力; (3)物体从第一次越过平衡位置时刻起到它运 动到上方 5cm 处所需要的最短时间。
解: k/m7.0r7as d 1
(1)选坐标系如图
A0.1m , 0
x 0 .1 co 7 .0 s t7
A
ox
ox
ox
4. 已知某质点作简谐运动,振动曲线如图, 试根据图中数据写出振动表达式。
解 xAc ots ()
由图,A=2m, π
4
x(m )
2
2
3 S 1
0
1
t(s)
4
-2
x2c o3st() m
44
5.已知一简谐振动曲线如图所示,由图确定振子: (1) 在_t___k__1___k__0_,_1,_2___ s时速度为零. (2) 在______2__________ s时动能最大.
旋转矢量
由旋转矢量 法,任意时 刻 t, 谐振动 物体的速度 方向的判定:
参考圆
x<0 x>0
v <0
v <0
o x < 0 x > 0
x
v >0 v >0
朱慈勉课后习题答案第10章 结构动力学

10-19 试求图示梁在简谐荷载作用下作无阻尼强迫振动时质量处以及动力荷载作用点的动位
9 2 9 1 4 0.2 16 16
2
l
EI=常数
l 2
l 2
移幅值,并绘制最大动力弯矩图。设 6 EI 。 ml 3 (a) F sin t m A EI l 解:由力法可知,单位荷载作用在 B 点引起 B
24 EI * 5 其中 , P F ,稳态解: ml 3 2
2
yt
1 3EI , m ml 3
6EI ml 3
1 F Fl 3 Fl 3 sin t sin t 即幅值为 2 m 2 3EI 3EI 1 2
5 3 Fl 1 =2 sin t 1 24 EI 1 4 5Fl 3 = sin t 36 EI
所示结构的运动方程为 yt C = (2)求 B 点的动位移反应
5Fl 3 5Fl 3 sin t ,C 点最大动位移幅值为 36 EI 36 EI
当幅值最大时,弯矩也最大。
.. yt B f 21 FI f 22 P sin t f 21 m yt B f 22 P sin t
M2图
解:此体系为静定结构,内力容易求得。 在集中质量处施加垂直力 P,使质量发生竖向单位位移,可得弹簧处位移为 由此根据弯矩平衡可求得 P
2 。 3
4 k。 9
y 11M 1 12 Fp (t )
由图乘法:
(c)
4 k 9 2 k 。 m 3 m
11
l/2 l l l 5l 3 1 2 2 l3 l l , 12 2 l 2 EI 3 3EI 6 EI 2 2 2 48 EI
2024-2025学年高中物理第一章机械振动4阻尼振动受迫振动教案1教科版选修3-4

3. 阻尼系数:
- 定义:描述阻尼作用大小的物理量。
- 公式:c = Δω/Δt
4. 实际应用:
- 建筑结构抗震设计
- 机械系统故障诊断
八、课堂
1. 课堂评价
通过提问、观察、测试等方式,了解学生的学习情况,及时发现问题并进行解决。
- 提问:在课堂上,通过随机提问、小组讨论等方式,了解学生对阻尼振动与受迫振动概念的理解程度。
3. 简洁明了:板书设计应尽量简洁,避免冗长的文字,使用图表、示意图等辅助表达,提高学生的信息接收效率。
4. 突出重点:使用不同颜色或特殊标记来强调重要概念、公式和结论,引起学生的注意。
5. 准确精炼:板书内容应准确无误,避免使用模糊不清的文字或图形,确保学生能够正确理解。
6. 概括性强:板书应能够概括本节课的主要内容,使学生能够快速回顾和总结。
- 通过分组讨论、分享学习心得与解题思路,引导学生主动参与,激发学生的思考,从而突破难点。
- 在案例分析环节,引导学生关注实际应用中的阻尼振动与受迫振动现象,培养学生运用物理知识解决实际问题的能力,加深对重点知识的理解和运用。
- 通过课后作业的布置与批改,及时了解学生的学习情况,针对学生的薄弱环节进行针对性的辅导,从而帮助学生掌握难点知识。
选择几个典型的阻尼振动与受迫振动案例进行分析。
详细介绍每个案例的背景、特点和意义,让学生全面了解阻尼振动与受迫振动的多样性或复杂性。
引导学生思考这些案例对实际生活或学习的影响,以及如何应用所学生物理知识解决实际问题。
4. 学生小组讨论(10分钟)
目标:培养学生的合作能力和解决问题的能力。
过程:
将学生分成若干小组,每组选择一个与阻尼振动与受迫振动相关的主题进行深入讨论。
拉格朗日方程刚体动力学振动 习题课
x
A vA
vCA
m 1 g c B
m 2g
解:系统的主动力均为有势力
分析系统的动能和势能
vT A 1 2xm 1 vA 2 A1 2 JA rx A 2 1 2 Am B2 v C 2 1 2JCA 2 B
vC vAvCA
T 3 4 m 1 x 2 1 2 m 2 x 2 1 6 m 2 L 22 1 2 m 2 x L c o s T ( x ,,)
V L2m2g(1cos)
拉格朗日函数 LTVL(x ,,)中不显含广义坐标x和时间t
7
BUAA
习题课
T x3 2m 1xm 2x1 2m 2L co sC 系统的什么广义动量守恒?
研究整体:
x
A vA
研究圆盘:
LrA12mAr2A12m1rxF Ay
A
F
vCA LrA Fr
A
r
F Ax
c m 1 g
T V 1 2 m 1 x 2 1 2 m 2 x 2 1 6 m 2 L 2 2 1 2 m 2 x L c o s L 2 m 2 g ( 1 c o s ) E
6
BUAA
习题课
例:机构在铅垂面内运动,均质圆盘质量m1在地面上纯滚动,均 质杆AB质量m2用光滑铰链与圆盘连接。求系统首次积分。AB=L
拉格朗日方程刚体动力学振动 习 题课
BUAA
第二类拉格朗日方程的总结
对于具有完整理想约束的质点系,若系统的自由度为k,
则系统的动力学方程为:
d dt
L qj
qLj
Q'j
(j1, ,k)
其中:LTV T:为系统的动能,V:为系统的势能
Q
振动理论课后题部分汇总

第一章2-1 一单层房屋结构可简化为题2-1图所示的模型,房顶质量为m ,视为一刚性杆;柱子高h ,视为无质量的弹性杆,其抗弯刚度为EJ 。
求该房屋作水平方向振动时的固有频率。
解:由于两根杆都是弹性的,可以看作是两根相同的弹簧的并联。
等效弹簧系数为k 则 mg k δ=其中δ为两根杆的静形变量,由材料力学易知δ=324mgh EJ =则 k =324EJ h设静平衡位置水平向右为正方向,则有"m x kx =-所以固有频率3n 24mh EJ p =2-2 一均质等直杆,长为 l ,重量为W ,用两根长h 的相同的铅垂线悬挂成水平位置,如题2-2图所示。
试写出此杆绕通过重心的铅垂轴作微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角θ 2aθ=h α2F =mg由动量矩定理: ah a mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ其中12cossin ≈≈θαα h l ga p ha mg ml n 22222304121==⋅+θθθF sin α2θαFhmgθFg h a l ga h l p T n 3π23π2π222=== 2-3 求题2-3图中系统的固有频率,悬臂梁端点的刚度分别是1k 和3k ,悬臂梁的质量忽略不计。
解:悬臂梁可看成刚度分别为k 1和k 3的弹簧,因此,k 1与k 2串联,设总刚度为k 1ˊ。
k 1ˊ与k 3并联,设总刚度为k 2ˊ。
k 2ˊ与k 4串联,设总刚度为k 。
即为21211k k k k k +=',212132k k kk k k ++=',4241213231421432421k k k k k k k k k k k k k k k k k k k k ++++++=)(42412132314214324212k k k k k k k k k k m k k k k k k k k k p ++++++=2-4求题2-4图所示的阶梯轴一圆盘系统扭转振动的固有频率。
《振动理论》课后习题答案

1-1一个物体放在水平台面上,当台面沿铅垂方向作频率为5 Hz的简谐振动时,要使物体不跳离平台,对台面的振幅应有何限制?解:物体与桌面保持相同的运动,知桌面的运动为,x=A sin10πt;由物体的受力分析,N = 0(极限状态)物体不跳离平台的条件为:;既有,,由题意可知Hz,得到,mm。
1-2有一作简谐振动的物体,它通过距离平衡位置为cm及cm 时的速度分别为20 cm/s及cm/s,求其振动周期、振幅和最大速度。
解:设该简谐振动的方程为;二式平方和为将数据代入上式:;联立求解得A=10.69cm;1/s;T=s当时,取最大,即:得:答:振动周期为2.964s;振幅为10.69cm;最大速度为22.63m/s。
1-3 一个机器内某零件的振动规律为,x的单位是cm,1/s 。
这个振动是否为简谐振动?试求它的振幅、最大速度及最大加速度,并用旋转矢量表示这三者之间的关系。
解:振幅A=0.583最大速度最大加速度1-4某仪器的振动规律为。
此振动是否为简谐振动?试用x- t坐标画出运动图。
解:因为ω1=ωω2=3ω,ω1≠ω2.又因为T1=2π/ω T2=2π/3ω,所以,合成运动为周期为T=2π/3ω的非简谐运动。
两个不同频率的简谐振动合成不是简谐振动,当频率比为有理数时,可合称为周期振动,合成振动的周期是两个简谐振动周期的最小公倍数。
1-5已知以复数表示的两个简谐振动分别为和,试求它们的合成的复数表示式,并写出其实部与虚部。
解:两简谐振动分别为,,则:=3cos5t+3isin5t=5cos(5t+)+3isin(5t+)或;其合成振幅为:=其合成振动频率为5t,初相位为:=arctan 则他们的合成振动为:实部:cos(5t+ arctan)虚部:sin(5t+ arctan)1-6将题1-6图的三角波展为傅里叶级数。
解∶三角波一个周期内函数x (t)可表示为,由式得n=1,2,3……于是,得x(t)的傅氏级数1-7将题1-7图的锯齿波展为傅氏级数,并画出频谱图。
马文蔚《物理学》(第6版)(下册)配套题库【名校考研真题+课后习题+章..

目 录第一部分 名校考研真题第9章 振 动第10章 波 动第11章 光 学第12章 气体动理论第13章 热力学基础第14章 相对论第15章 量子物理第二部分 课后习题第9章 振 动第10章 波 动第11章 光 学第12章 气体动理论第13章 热力学基础第14章 相对论第15章 量子物理第三部分 章节题库第9章 振 动第10章 波 动第11章 光 学第12章 气体动理论第13章 热力学基础第14章 相对论第15章 量子物理第四部分 模拟试题马文蔚等《物理学》配套模拟试题及详解第一部分 名校考研真题第9章 振 动一、选择题一弹簧振子,重物的质量为m ,弹簧的劲度系数为k ,该振子作振幅为A 的简谐振动.当重物通过平衡位置且向规定的正方向运动时开始计时,则其振动方程为( ).[电子科技大学2007研]A.B .C .D.E.二、填空题一物体作简谐振动,其振动方程为(国际单位制).则此简谐振动的周期为______;当t =0.6s 时,物体的速度为______.[南京航空航天大学2008研]三、计算题1.考虑n =2摩尔的理想气体氦气,置于一垂直放置的圆柱体所缸中,如图9-1所示.水平放置的活塞可以在气缸中无摩擦上下运动.活塞质量为,气缸截面积为.活塞被一无质量的弹簧与气缸上端连接,活塞向下运动时将氦气向下压缩,活塞上方为真空.系统开始阶段活塞与氦气处于平衡状态时,弹簧处于未形变状态,氦气压强为B【答案】1.2s ;-20.9cm/s【答案】、温度为、体积为.假定弹簧弹性常数,气体常数,对于单原子氦气,热容比.活塞在平衡位置作小幅谐振动,计算其谐振频率f.[南京大学2006研]图9-1解:对弹簧,由牛顿第二定律可得: ①由于振动很快,系统来不及与外界发生热量交换,视为绝热过程,因此有:由于活塞在平衡位置作小幅谐振动,因此V0与V之间的变化很小,利用泰勒展开得: ②将②式代入①式有: ③初始时活塞处于平衡状态,有: ④将④代入③有: 整理得: 解得振动频率为: 2.质量分别为和的两个物体A、B,固定在倔强系数为的弹簧两端,竖直地放在水平桌面上,如图9-2所示.用一力垂直地压在A上,并使其静止不动.然后突然撤去,问欲使B离开桌面至少应多大?[中科院–中科大2007研]图9-2解:欲使B刚好弹起,则A到达最高点时弹簧的伸长量至少应为.假设力F作用下弹簧的压缩量为(初始位置),弹簧无变形时A的坐标为0(平衡位置).运动方程为: 当时,,则方程的解为:利用对称性,在最高点有.整理可得:又,于是:3.如图9-3所示,已知轻弹簧的劲度系数为k,定滑轮可看作质量为M,半径为R的均质圆盘,物体的质量为m,试求:(1)系统的振动周期;(2)当将m托至弹簧原长并释放时,求m的运动方程(以向下为正方向).[南京理工大学2005研]图9-3 图9-4解:(1)受力分析如图9-4所示,设平衡位置为原点,向下为正,则将物体拉至处时:对m:对: (为角加速度)解得:即: 则系统振动圆频率: 振动周期: (2)设振动方程,其中,.初始条件,当时: 解得: 求得m的运动方程为: 第10章 波 动一、选择题一平面简谐波沿x 轴正方向传播,振幅为A ,频率为.设时刻的波形曲线如图10-1所示,则x=0处质点的振动方程为( ).[电子科技大学2006研]图10-1A.B .C .D.二、填空题1.一质点沿x 轴作简谐振动,它的振幅为A ,周期为T .时,质点位于x 轴负向离平衡最大位移的一半处且向负方向运动,则质点的振动方程为x =______.在一周期内质点从初始位置运动到正方向离平衡位置为最大位移的一半处的时间为______.[南京航空航天大学2007研]2.一平面简谐机械波在弹性媒质中传播,一媒质质元在通过平衡位置时,其振动动能与弹性势能______(填相同或不同).[湖南大学2007研]B 【答案】【答案】相同【答案】3.以波速u 向x 正方向传播的平面简谐波,振幅为A ,圆频率为,设位于坐标处的质点,t =0时,位移,且向y 负方向运动,则该质点的振动方程为______,该平面简谐波的波动方程(波函数)为______.[南京理工大学2005研]三、计算题1.火车以匀速行驶而过,铁路边探测器所测得的火车汽笛最高和最低频率分别为和,设声速为,求火车的行驶速度.[南京大学2006研]解:由多普勒效应可得: ① ②①、②两式相除,得:解得火车车速为:2.一列平面简谐纵波在均匀各向同性弹性介质中传播,求单位体积介质所具有的能量?(自设相关物理量).[北京师范大学2008研]解:波动方程:振动速度: 设介质的密度为,用dV 表示体元体积,则该体积元动能:体积应变: 则势能: 因为,所以: 则有: 所以,单位体积介质所具有的能量为:【答案】3.已知一平面简谐波的表达式为y=0.25cos(125t-0.37x)(SI).(1)分别求x1=10m,x2=25m两点处质点的振动方程.(2)求x1、x2两点间的振动相位差.(3)求x1点在t=4s时的振动位移.[浙江大学2008研]解:(1),(2)由,可得: 所以: (3)时的振动位移为:4.甲火车以43.2千米/小时的速度行驶,其上一乘客听到对面驶来的乙火车鸣笛声的频率为v1=512赫兹;当这一火车过后,听其鸣笛声的频率为v2=428赫兹.求乙火车上的人听到乙火车鸣笛的频率v0和乙火车对于地面的速度u.设空气中声波的速度为340米/秒.[中科院—中科大2009研]解:由题可得: 其中,v=340m/s,v0=43.2km/h=12m/s.解得:v0=468Hz,u=18.4m/s=66.3km/h5.如图10-2所示,一平面简谐波沿x轴正方向传播,已知振幅为A,频率为,波速为u.(1)若t=0时,原点O处质元正好由平衡位置向位移正方向运动,写出此波的波函数.(2)若该波在离原点处被竖直的墙面反射,欲使坐标原点处为波节,求满足的条件(设反射时无能量损失).[厦门大学2006研]图10-2解:(1)t=0时,y0=0,u0>0,所以初始相位,故波动方程为:(2)欲使波在x0处反射后到达y0处与原行波叠加产生波节,则原点O处两振动必须反相.即:所以有: ,k=0,1,2,…6.已知一平面余弦波振幅A=0.03m,波速u=1ms-1,波长,若以坐标原点O处质点恰好在平衡位置且向负方向运动时作为计时起点,求:(1)O点振动方程.(2)波动方程.(3)与原点相距处,t=1秒时,质点的位移、速度;(4)和两点间的相位差.[南京航空航天大学2006研]解:(1)设O点振动方程为:.其中,,由题意知:.于是: (2)波动方程为:.得:(3)与原点相距处,波动方程:得质点速度: 当t=1秒时: (4)相位差: 7.设入射波的表达式为,在处发生反射,反射点为一固定端,设反射时无能量损失,求:(1)反射波的表达式.(2)合成的驻波的表达式.(3)波腹和波节的位置.[湖南大学2007研]解:(1)反射波的表达式为: (2)驻波的表达式为:(3)由,可得波腹位置为:由,可得波节位置为:,8.图10-3所示为一沿x轴正方向传播的平面余弦行波在t=2s时刻的波形曲线,波速u=0.5m/s,求:(1)原点o的振动方程;(2)波动方程.[电子科技大学2007研]图10-3解:(1)由已知得:.可得振动方程:(2)波动方程为: 9.一横波沿绳子传播,其波的表达式为.(1)求此波的振幅、波速、频率和波长.(2)求绳子上各质点的最大振动速度和最大振动加速度.(3)求处和处二质点振动的相位差.[宁波大学2009研]解:(1)将波的表达式与标准形式比较,得:,(2) (3),二振动反相.第11章 光 学一、选择题1.在迈克耳孙干涉仪的一条光路中,放入一折射率为n 厚度为d 的透明介质片后,两光路光程差的改变量为( ).[暨南大学2010研]A.B.C.D.【解析】迈克尔孙干涉仪的原理为光的干涉,两束光进过G1平面镜被分为两束光,这两束光发生干涉.当在其中一条光路中放入折射率为n 的厚透明介质时,被放入介质的那条光路光程将发生变化,由于需要两次穿过新加入的透明介质,故光程差的改变量为:.2.自然光从空气入射到某介质表面上,当折射角为30°时,反射光是完全偏振光,则此介质的折射率为( ).[暨南大学2010研]A.B.C.D.3.若把牛顿环装置(都是用折射率为1.52的玻璃制成的)由空气搬入折射率为1.33的水中,则干涉条纹( ).[暨南大学2010研]C【答案】B【答案】当折射光线与反射光线垂直时反射完全偏振光,由折射公式得.【解析】A .中心暗斑变成亮斑B .间距不变C .变疏D .变密【解析】设牛顿环中某处的空气薄层厚度为e ,互相干涉的两束反射光的光程差为,若n 增大,则每个位置处的光程差增大,形成更大级数的干涉条纹,所以条纹变密.4.根据惠更斯——菲涅耳原理,若已知光在某时刻的波阵面为S ,则S 的前方某点P 的光强度决定于波阵面S 上所有面积元发出的子波各自传到P 点的( ).[暨南大学2010研]A .振动的相干叠加B .振动振幅之和C .光强之和D .振动振幅平方之和5.在单缝夫琅和费衍射实验中,波长为l 的单色光垂直入射在宽度为a=4l 的单缝上,对应于衍射角为30°的方向,单缝处波阵面可分成的半波带数目为( ).[暨南大学2010研]A .2个B .6个C .4个D .8个D【答案】A【答案】由惠更斯—菲涅耳原理,统一波阵面各点发出的子波,经传播而在空间某点相遇,发生的是相干叠加.【解析】C【答案】可近似将单缝所在平面看作波阵面,则每一半波带都沿单缝方向,设总半波带【解析】得N=4.6.一束白光垂直入射在光栅上,在形成的同一级光栅光谱中,偏离中央明纹最远的是( ).[暨南大学2010研]A .紫光B .黄光C .红光D .绿光【解析】根据光栅公式,同一级条纹满足,可见光中红光波长最长,故偏离中央明纹最远.7.光强为I 0的自然光依次垂直通过两个偏振片,且此两偏振片的偏振化方向夹角a=45°,若不考虑偏振片的反射和吸收,则透射偏振光的强度I 是( ).[暨南大学2010研]A.B.C.D.由此可得,8.一光波分别通过两种不同介质的光程相同,则( ).[暨南大学2011研]数为N ,则C【答案】A【答案】自然光经过任一偏振片后光强减半,再经过另一个偏振片,根据马吕斯定律【解析】A .光波通过这两种介质的时间不相同B .光波通过这两种介质的时间相同C .光波通过这两种介质后的位相不相同D .光波通过这两种介质后的位相相同9.在迈克耳孙干涉仪的一臂中放入一折射率为厚度为的透明介质片,同时在另一臂中放入一折射率为厚度为的透明介质片,设没有放两透明介质片时两臂的光程差为 则放入两透明介质片后两臂的光程差为( ).[暨南大学2011研]A.;B .C.D.10.关于光学仪器的分辨本领,下述表述错误的是( ).[暨南大学2011研]A .分辨本领受到衍射极限的限制B .分辨本领和光学仪器的通光口径有关C .分辨本领和照明光的波长有关D .分辨本领和照明光的强度有关B【答案】光程差公式为 L =nd ,在不同介质中光速不同,v =c/n,故传播时间为 t =d/v =L/c ,对不同的介质相同.出射光的位相与入射光有关,故不能确定.【解析】B【答案】放入介质片后,相应光路中的光两次经过此介质,光程变化为2nd ,所以放入两个介质片后,两臂的光程差变化为2(n2-n1)d【解析】D【答案】光学仪器的分辨率,与由衍射导致的像点的展宽有关,而衍射条纹与通光孔径【解析】11.自然光从空气入射到某透明介质表面上,则( ).[暨南大学2011研]A .反射光一定是完全偏振光B .反射光一定是部分偏振光C .折射光一定是部分偏振光D .折射光一定是完全偏振光12.眼镜片上的增透膜是根据光的以下什么现象做成的( ).[暨南大学2011研]A .光的干涉B .光的衍射C .光的布儒斯特定律D .光的马吕斯定律13.光强度( ).[暨南大学2011研]A .和光波的振幅成正比B .和光波的振幅的平方成正比C .和光波的位相成正比D .和光波的位相的平方成正比和波长有关,与光强无关.C【答案】根据菲涅耳反射折射公式,自然光入射产生的反射和折射光都将变成部分偏振光.但当入射角为布鲁斯特角时,反射光为完全偏振光.【解析】A【答案】增透膜的原理是通过在镜片表面镀膜,使得某波长的光在膜前后表面反射光之间光程差是半波长的奇数倍,从而使反射光相干抵消,增加透射.【解析】B【答案】光强度是单位面积单位时间内辐射光的平均能量,此平均能量与电场分量或磁场分量的振幅的平方成正比,而由于是时间平均效果,与位相无关.【解析】14.一束白光垂直入射在单缝上,在第一级夫琅和费衍射明纹中,靠近中央明纹的颜色是( ).[暨南大学2011研]A .紫光B .黄光C .红光D .绿光【解析】单缝衍射明纹满足,故条纹到中央明纹的距离与波长正相关,所以紫光一级明纹最靠近中间.15.光强为I0的自然光依次垂直通过三个偏振片,且第一和第三偏振片的偏振化方向夹角a=90°,第二和第三偏振片的偏振化方向夹角a=45°,若不考虑偏振片的反射和吸收,则从第三偏振片透射出的光强I 是( ).[暨南大学2011研]A.B.C.D.二、填空题1.一个平凸透镜的顶点和一平板玻璃接触,用单设光垂直照射,观察反射光形成的牛顿环,测得中央暗斑外第k 个暗环半径为r 1.现将透镜和玻璃板之间的空气换成某种液体(其折射率小于玻璃的折射率),第k 个暗环的半径变为变为r 2,由此可知该液体的折射率为______.[南京航空航天大学2008研]A【答案】C【答案】自然光经过第一个偏振片,光强减半.第一偏振片的偏振方向与第二个,第二个与第三个,夹角都是45°,根据马吕斯定律,【解析】2.自然光入射到空气和某玻璃的分界面上,当入射角为60°时,反射光为完全偏振光,则该玻璃的折射率为______;一束强度为的自然光垂直入射于两种平行放置且透光轴方向夹角为60°的偏振片上,则透射光强度为______.[南京理工大学2005研]三、计算题1.一平凸透镜置于一平板玻璃上,波长为6700Å的红光垂直从上方入射,由透镜凸表面和平板玻璃表面反射的光形成牛顿环干涉条纹.透镜和平玻璃的接触点处为暗纹,测得第12条暗纹的半径为11mm ,求透镜的曲率半径R .[暨南大学2010研]解:牛顿环上r半径处空气层的厚度为第12条暗纹处与第一条暗纹处光程差相差11个波长,可得透镜的曲率半径为 2.(5分)将麦克耳孙干涉仪的一臂稍微调长(移动镜面),观察到有150条暗纹移过视场.若所用光的波长为480nm ,求镜面移动的距离.[暨南大学2010研]解:在迈克尔孙干涉仪中,沿两条光路的光发生干涉,它们之间光程差每变化一个波长,则有一条暗纹移过视场.设镜面移动距离为d,则得.3.在杨氏双缝实验中,两缝相距2mm ,用l =750nm 和l¢=900nm 的混合光照明,若屏幕到缝的距离为2m ,问两种波长的光的干涉明纹重合的位置到中央明纹中线的最小距离为多少?[暨南大学2010研]解:双缝干涉第k级干涉明纹满足,【答案】【答案】要想使不同波长的两束光条纹重合,需要某级条纹距离相同,即可得,k最小值为6,故4.如何利用偏振片和波晶片(1/4波片、半波片等)将一束自然光转化为圆偏振光?又如何利用波晶片将一线偏振光的偏振方向旋转90度?[暨南大学2010研]解:(1)首先将自然光通过偏振片,变成线偏光.然后使线偏光通过1/4波片,保证线偏振方向与波片光轴方向呈45°角,从而出射的o光和e光方向相同,振幅相等,相位差,从而变成圆偏振光.(2)首先将线偏光通过一个1/4波片,变成圆偏光,再经过一个与原偏振方向垂直的偏振片,变成新方向的线偏光.5.白光垂直照射到一厚度为370nm的肥皂膜(膜的两侧都为空气)上,设肥皂的折射率为1.32,试问该膜的正面呈现什么颜色?[暨南大学2011研]解:肥皂膜前后表面反射光的光程差为青色光的波长范围是476-495 nm,所以L正好是青色光波长的二倍;红色光的波长范围是 620-750 nm,所以L正好是红色光波长的3/2倍.所以前后表面反射的红光相干相消,青光相干相长,所以呈青色.6.用波长500nm的单色光垂直照射到宽0.5mm的单缝上,在缝后置一焦距为0.5m的凸透镜,用一屏来观察夫琅和费衍射条纹,求在屏上中央明纹的宽度和第一级明纹的宽度?并定性解释级次越高,明纹的强度越低的原因.[暨南大学2011研]解:(1)单缝夫琅禾费衍射产生暗纹条件为中央和第一级明纹处衍射角很小,可以近似.所以各暗纹距离中央的位置为所以中央明纹和第一级明纹的宽度分别为(2)明纹级次越高,说明单缝两个位置单色光距明纹处的光程差越大,相位差越大.根据光振幅矢量性,相同幅值的相干光相位差越大,合成振幅越小,从而光强越低.7.请解释为什么劈尖干涉条纹是等间距的直条纹而牛顿环是非等间距的圆条纹?如果看到牛顿环的中央是暗纹,解释之?[暨南大学2011研]解:(1)根据干涉原理,不论是劈尖干涉条纹还是牛顿环条纹,相邻条纹处干涉光光程差的差为.因为劈尖上到顶点的距离和厚度成正比,而厚度和光程差成正比,所以会形成等间距的直条纹;而牛顿环空气层厚度与光程差成正比,但由于棱镜下表面是球形,使得厚度与到中心的水平距离不成正比,所以形成非等间距的圆条纹.(2)中央处空气层厚度为0,棱镜底面与平面玻璃表面发射光的光程差为0.但光由光疏介质(空气)进入光密介质(平面玻璃)进行反射时会产生半波损失,使得两束相干光完全相消,出现中央暗纹.8.杨氏双缝实验中,在两缝S1和S2前分别放置两偏振片P1和P2,在两缝S1和S2后放置一偏振片P3,如图11-1所示,照明光为一自然光.问 (1) 当P1和P2偏振化方向相同,P1和P3偏振片的偏振化方向夹角为45°,屏上是否会出现干涉条纹?为什么?(2)当P1和P2偏振化方向垂直,P1和P3偏振片的偏振化方向夹角为45°,屏上是否会出现干涉条纹?为什么?[暨南大学2011研]图11-1解:(1)会出现干涉条纹.因为经过两个偏振片的光具有相同的偏振方向,都沿P3的方向偏振,所以同频率的光会产生相干叠加,出现干涉条纹.(2)会出现干涉条纹.因为虽然经过第一个偏振片的两束光具有垂直的偏振方向,但由于两束光的偏振方向都与P3偏振化方向呈45°角,根据马吕斯定律,经过P3后的两束光偏振方向相同,且振幅相等.所以依然会产生干涉条纹.9.(1)迈克尔逊干涉仪的M2镜前,当插入一薄玻璃片时,可以观察到有150条干涉条纹向一方移过.若玻璃片的折射率为n=1.632,所用单色光的波长为500nm,试求玻璃片的厚度.(2)用钠光灯(,)照明迈克尔逊干涉仪,首先调整干涉仪得到最清晰的干涉条纹,然后移动M1,干涉图样逐渐变得模糊,到第一次干涉现象消失时,M1由原来位置移动了多少距离?[南京大学2006研]解:(1)插入玻璃片后,光程差改变量为,则:解得玻璃片厚度: (2)干涉条纹消失,即、两个波长照射下的亮纹和暗纹重合,即:解得: 10.试按下列要求设计光栅:当白光垂直照射时,在30°衍射方向上观察到波长为600nm 的第二级主极大,且能分辨Δλ=0.05nm的两条谱线,同时该处不出现其他谱线的主极大.[浙江大学2008研]解:由光栅方程: .则:当时,可得: 当,.因为时,主极大,即缺级,因此有:所以有: 11.如图11-2所示,有一缝宽分别为a和2a、两缝中心相距为d的双缝衍射屏,今在缝宽为2a的左半缝前覆盖一个宽度为a的相移片.导出正入射时其夫琅禾费衍射强度分布公式.[山东大学1997研]图11-2解:x方向振幅: y方向振幅: 光强: 12.如图11-3所示,在偏振化方向夹角为60°的两偏振片和之间插入一个四分之一波片C,其光轴与两偏振片偏振化方向的夹角均为30°.一强度为的自然光先后通过偏振片、四分之一波片C和偏振片,求出射的光强度.[厦门大学2006研]图11-3解:经过P1后: ,经过四分之一波片后: ,得出射光振幅: 出射光光强: 第12章 气体动理论一、选择题若为气体分子速率分布函数,则的物理意义是( ).[电子科技大学2005研]A .速率区间内的分子数B .分子的平均速率C .速率区间内的分子数占总分子数的百分比D .速率分布在附近的单位速率区间中的分子数二、填空题1.三个容器A 、B 、C 中装有同种理想气体,其分子数密度n 相同,而最概然速率之比为,则单位体积内的内能之比为______.[南京航空航天大学2007研]2.一定量的理想气体贮于某一容器中,温度为T ,气体分子的质量为m .根据理想气体的分子模型和统计假设,分子速度在x 方向的分量平方的平均值为______.[北京工业大学2004研]3.由绝热材料包围的窗口被隔板隔为两半,左边是理想气体,右边真空,如果把隔板撤去,气体将进行自由膨胀过程,达到平衡后气体的温度______(填升高、降低或不变),气体的熵______(填增加、减小或不变).[湖南大学2007研]4.27℃的1mol 氧气分子的最概然速率为______,其物理意义为______,分子的平均平动动能为______,1mol 理想氧气的内能为______.[南京理工大学2005研]三、计算题B【答案】1∶4∶9【答案】【答案】不变;增加【答案】【答案】1.设气体分子的速率分布满足麦克斯韦分布律.(1)求气体分子速率与最可几速率相差不超过0.5%的分子占全部分子的百分之几?(2)设氦气的温度为300K,求速率在3000~3010m/s之间的分子数与速率在1500~1510m/s之间的分子数之比.(3)某种气体的温度为100K和400K时的最可几速率分别为和.在100K时与相差不超过1m/s的分子数为总数的a%,求400K时与相差不超过1m/s的分子数占总数的百分比.[南京大学2006研]解:(1)设气体分子速率与最可几速率相差不超过0.5%的分子数为,全部分子数为,则:(2)设速率在3000~3010m/s之间的分子数为,速率在1500~1510m/s之间的分子数为,则:(3)2.1摩尔双原子理想气体的某一过程的摩尔热容量,其中为定容摩尔热容量,R 为气体的普适恒量.(1)导出此过程的过程方程;(2)设初态为(,),求沿此过程膨胀到时气体的内能变化,对外做功及吸热(或放热).[北京师范大学2006研]解:(1)理想气体的状态方程为,其微分形式为:由热力学第一定律,则:由上述两式消去,得: 则由的积分可得:上式即为双原子分子理想气体的过程方程.(2)初态,其中;末态.由过程方程,可知:所以,末态为.①气体内能的变化:②对外做功: ③吸收的热量:负号表示与题设相反,即此过程向外放热 .3.0.2g氢气盛于3.0 L的容器中,测得压强为8.31×104Pa,则分子的最概然速率、平均速率和方均根速率各为多大?[浙江大学2008研]解:气体状态方程: 最概然速率:平均速率:方均根速率: 4.设有N个气体分子组成的系统,每个分子质量为m,分子的速率分布函数为求:(1)常数a.(2)分子的平均速率.(3)若分子只有平动,且忽略分子间的相互作用力,求系统的内能E.[厦门大学2006研]解:(1)由归一化条件可得:解得: (2)N个分子的平均速度:=(3)由,得:5.许多星球的温度达到108K,在这温度下原子已经不存在了,而氢核(质子)是存在的,若把氢核视为理想气体,求:(1)氢核的方均根速率是多少?(2)氢核的平均平均平动动能是多少电子伏特?[宁波大学2009研](普适气体常量,玻尔兹曼常量)解:(1)由于,而氢核,所以有:(2)第13章 热力学基础一、选择题在一定量的理想气体向真空作绝热自由膨胀,体积由增至,在此过程中气体的( ).[电子科技大学2007研]A.内能不变,熵增加B.内能不变,熵减少C.内能不变,熵不变D.内能增加,熵增加二、填空题热力学第二定律表明在自然界中与热现象有关的实际宏观过程都是不可逆的.开尔文表述指出了______的过程是不可逆的,而克劳修斯表述指出了______的过程是不可逆的.[北京工业大学2004研]三、计算题1.假设地球大气为干燥空气,导热性能不好.气流上升缓慢,可以视为准静态过程.试导出大气的垂直温度梯度dT/dz,并估算其量值的大小.[南京大学2005研]解:对于绝热过程有: 对上式两边同时求导,得:于是有: 对于大气层,气压强变化满足,再结合理想气体状态方程,得:A【答案】功变热;热传导【答案】。
第2章 结构动力学基础工程,振动,稳定,全套,课件
动荷载的特性 结构的动力特性 结构响应分析
2
结构动力体系
位移
静荷载
大小 方向 作用点
结构体系
输入 input
刚度、约束 杆件尺寸 截面特性
静力响应
输出 Output
内力 应力
数值
动荷载
大小 方向 作用点 时间变化
结构体系
输入 input
质量、刚度 阻尼、约束 频率、振型
动力响应
输出 Output
k 1
n
则组合系数Ak(t)称为体系的广义坐标。 nπ x ( x ) bn sin l n 1
广义坐标 位移函数
广义坐标表示相应位移函数的幅值,是随时间变化的函数。 广义坐标确定后,可由给定的位移函数确定结构振动的位移曲线。 以广义坐标作为自由度,将无限自由度体系转化为有限个自由度。
11
2.2 结构动力学的任务和研究内容
• 结构动力学的任务
a. 确定结构的固有动力特性,建立结构的固 有动力特性、动荷载和结构动力响应三者 间的相互关系; b. 提供结构动力响应分析方法; c. 提供对结构进行动力设计的依据。
12
• 结构动力学的研究内容
动荷载 结构 体系 控制
理论研究:
• • 结构的响应分析(结构动力学的正问题) 结构的参数识别或系统识别(反问题)
mdx dx
DOF=∞
m
机器振动
y
y
21
2.3.2 体系自由度的简化
1. 集中质量法
把结构的分布质量按一定的规则集中到结构的某个或 某些位置上,成为一系列离散的质点或质量块 。 适用于大部分质量 集中在若干离散点 上的结构。
m1
机械振动基础李晓雷等课后习题答案

机械振动基础(李晓雷等)课后习题答案第一章1.3设*两个刚度分别为A. AWtt 性*»如fflT —1.3所示,试证明*由力的平 J 上=k\fS刃对》统施加力P, M 两个弹ff 的变为*F弓=7 1 1■,»«的总变形为「.2百+不=円2+2)D 它们井联W 的总《度*呷为,片呷=心+右2)它们串联时的总刚度/ «£*= +心 A X<5?-\AA/W»i D 对系统施加力P,粥两个弹賛的变3»相同为口 但受力 不同*分别**,>? = <» * =心丫俎0IL $>^«II <V 5X 10故《效刚度为*r -*故W效刚度为’亠=£=芋务=±+±1.4求S所示扭转斥统的总M度•两个串联的納的扭转M度分别为斤八K I対系统n加扭矩T.则两納的转角为,l-fT系统的总转角为,0 = ft +仇=ZY^— + )丄亠丄+丄)心T仏V故《效刚度为* — = —+ —Q Al仏1.5两只性》尼廉ft分别为©• 3 试计«总粘性》尼1)an只MDia并联时.2)衽两只联时•M. 1)对系统tt加力P, M两个績HB的速度m为•讥受力分别为*P yr = G + G故«效刚度为,X2}对«统《加力P, M两个MUM的速度为>.P 叫=—G . »«的总速度为,丘=占+尢=円丄十丄)・ P• q a-r, =—I .G故《效刚度为,r^ = - = - + - 才G A1.6 一简运动,UM为0. 5cm>周期为0.158.求量大速度和加速度•*筒谐运动叽吟二益心® 1•■为3_r= 5x 1()7 cos(—— zX/v)0J52/r 2/1Kb i x= -5x10'^ X— zsin(— /X刃/,) 0J50・15x= -5x10'^ X(-^2-z)" cos(-^^/X/w/.r)0J5 “0J5= 5 X10 X (/W /s) 0.15所以」;r^ =5xl0'x(—)'(/zz<r) z 0・151.7 一加速度计指示出结构援动頻車为82Hz・并具«*大加速度50欽求提动的Ml由町可«b斗二竺竺厶斗3: {In fY (2jr X 25)* I/j' 5(hr'te iiWt两个同频率但不同相角的ffi«运动的舍成仍是同《*»»«运动.SP I 彳cos f0/+ J?COS(W/-^)= t'cOii(ft?Z-0)t 井讨论卩“皿心・兀三种特例.证明tJcosr9Z+ 眉tusU府一vO=./cos w/ + ^cos a>/cos g? + 殍!iin tsj/iintp =(J+ -^cos^)cosfo/+ ^sinflisinfty=J(.J+ ScQs^py +(^sin <p)^ cos(d>/- 0)=q才+用 CM(咖=0)=c询血=0)柚F尿jk=J/+2」尿朋孚+gD当即=0时(9=0-,C= ^+^1刃当卩吆时' 0 = afr/^{SL4YC= J/' + 矿i 3)当甲二托时T円=0;「=彳=占11.9 把Stt4林i«^ 为式.lit 4+5i=A&",其中t 卄J护+5’ ° 9 s 叭垢<2)4第二章24弹*下悬挂一物体,弹*静伸长为<5 -设将输体向下拉・使弹*有静伸长 35 •怫盾无初速厦地释敖,求此«的运动方8.Mt 设«体««为刃.弹«刚度为Mtmg = kS t SPi 3" = Jkf m = Jg/ 6取果统静平術位■为原点T=0,系统运动方《为<mx + k\ = 0A, =25 (♦考« 材 W4)為=012弹賛不受力时长度为65cm >下《挂上Ikgtt 体JB 弹ff 长蚣m.设用手托 住《休便回》原长后无初速度地释放.《求・体的运动方程、jqffi 及弹1(力的量大值•Wt 由H 可知,WK 的静伸长A= 0.85-0.65 =0.2(/w)取祭统的平《位■为廉点,ffSt. »统的运动«分方S 为t ;r+<r=0 其中,初始条件计需::卫e 栅和⑷所以系统的 M 应为《•"/)= -0.2cosroy(zz/)WII 力为(片=^/) =-r(Z) = - cos w^z(A»此* «■为OJm.周期为年($)、弹11力*大值为1N ・= 7(/V7”/$)所以I 3 =2J〃人*挂左MS 为^的上并处于»平會位另一■愉化从*度为力处«由«»加I 上而无弹M,如S 所示•求其«的运动•«>取系统的上下运动・r 为坐标,向上为正・静平«位・为凍点T=0>則当加 «『位移时,系统«.£「= 1( zn, + nh)i"U =二加2由 d (爲 +U) = 0 可知》(m, +zn,)x +fcx = 0RPi w… = jR/(m +nj2)黑统的初绐*件为,V -以a- k/H] +m.(US 守HWi m 妙=-(njj +mj 讦)69ttSft 的Bft 应为》x(t)=人 cosft)/ + A siiuu 」RPi Mf) = ^^(cosq/ - I 2艷 sin 叫0 k Yu +m. M 一质■为"八转动«|为/的n 柱体作a 由純滾《h n 心受w-wuztt «>如ffl 所示.求«统的 Mt 取D 柱休的转角0为坐様.逆时针为正• 转角时,系统 £, =-10- +im(0r)- =i(/ + mr 府「2 2 2U =~k{0ry由 d(Er+U) = 0 可«» (/ +mr)0+kr'e■平會位S 时0 = 0・则当加«0=00h 叫=ylkr^/{I +nir') (nd/t)16求如S所示«统的周期.三个弹««成輪鑿,且A=2£M3=£・JWt取加的上下运动"为堂橄向上为正.静平«位・为康点,r=0.則当刿有•,位»W> MttWi由diEy +(/) =0 可知8 mx +—k,x = 0 …遵5 2摄<.)zIttX"-VAA-'Mr£^JWW' --17如S所示,半&为r的均JRBie可左半&为A的n轨面内无滑动地.以DD 轨S*低位SO为平«位■左右微《•试导出柱体的》动方8,求其S«««・H.设《体・;«角堂様0如9所示.逆时为正.当系统«0«角时• M.0*U = W{R -r)(l -COS0) ^W(R -r)—设©为IB柱体转角速度,«心的»肘速4 = = /XP * Wi 0 =(斤")0r记DD柱体規«时»融点A的转动惯■为/" MloREg 0"「g 2g g爲巴宀g歼今Xrf莎2 2 2 g r 4 g(或#理解为,& =丄/0+丄一(R-rF丼》动和平动的动能)2 2 g由d(£y +U) = 0 可ft* -—(/?-r)-0+W(/? -r)0=02 g2g…船Z)静止农比■为7的液体中.设从平«m ・s 距«期见9),魅后无初速度地Ktt ,若不计 尼,求浮子其后的运动.»> »立如S 所示峑極«统平«Wx=o.*初始*件为.gZo所以浮子的«应为..,v )=-rsin (A/^ + -)V zff 2X9求如图所示系统微《扭撮的周期.S 中M 个可分别規水平納G. 4 转动,它们相互《會,不IB 相対滑劲・左图示位■(半径4*与04左間一水平 tt 上)•不受力.«擦轮可以看《t««均ftUft, *■分别为■“ f Hr 两轮的AS 分别为巾屮比・B 此絵的半径比为*1=區Y 叫由干两轮无相对滑动,因此其转角比为, 色=殳=1 Q 「1 d取《统静平《时q =0,则«,E 『=MCm 斤刈 2 +1(7 叫 f 冷2 =7(^ +叫)/;%/2 2 2 2 4 U =押吋+押©)2 =知+ £)(砂由 WEy +1/) = 0可知《 扌(zn*+;nj/■苗:+(人 + £)/■;% = 0加F+y (乂r )g=0・ Hh3.=X8横徽面面积为■为■的r _•TxX■——:£R .即'"储召"如八+ m 、子 由牛 «*-«»{«.低fi讥)⑺XI0如m 所示.轮子可绕水平軸转劝・对转報的 功《S 为/;轮《绕《软《・下M 握科■*为Q 的 体・《与轮缘之的无滑动•住S 示位由水平 ««ft 持平«・半径*与・均巳》•求ffm 动的罔 Wt 取轮的«tAo 为峑标.WSrttt 为正• JRi«^PW 0 = 0.則峑轮子转A 时.MStWiEr = - to- +- — ((?/?)" = -(/ + — R')^ 2 2 & 2 g(~~T7T —— )/ + —Kli e. ■ I—— <»<l/s)t 故 T = — = 2;rJ ——电— (• J/+£»Q 3. V 3XU 弹ff«堆一js«为■的笹体.A 由攝动的jQM 为7;W 上附加一个JRSwo MS»ff 的静1长増加"•求出地的・力加速度-•・• n.g =彳△/Z A / A7z~m dZ ・・■£= --- =---------- -----"h丁 “h弹«•由&£> +£7)=0可灿P(Z + — R-X)- + lafe = 0 g112 个・的VMttMBKM*. «■■" 中•个为也-a)«m ■■均m 忖入杆■•~r^Ar| \' J iu>Ml n»«Mtl«0Alk«> ■孚《时o ・o(•)若不计杆賣.系统作微提动,M 有.比J 上丄'妙2 gU ■ PgL( \ ■ eosO) * Jp由Mr wo 可Bb 二/?© "“■ 0 gBP t a. ■ ( md/t )如果考虑杆賣,系统作《»1衲,M 有*I PU « PgL( \ - COS0) +\ - COS0) * (― + —2 g 22由d^Ef 4(7)«0可知J (旦 + + (— +■ 0g 3g 2rp mR_r)g01 叫■ i-§—=— (p»d/»)Cb)如果考虫杆C,系线作IMK 动.M 有.Ep ■£(—丄‘妙 W/nJ 诫'■«—+ 牛)L'P'2 g2 32 g 3U 珂F 守tef 分撐)(吟:X 2Ul £宀自沁m 診艸Tf 哼疋■ — M»1-JHh q = H-5-^ ------ - (nd/t)(<r>(c)如«考AffS. »统作《t«l 动.M«tE 七自沁挣旳弓e 哼疋沪1 <r>236求««面"jiHr 内液体《动的n 期・《力不计,ffi 定液柱总长度为厶Mr 假设UJEHF 内液柱长几ft 面积为A. 9度为p ・取*统静平崙时势K 为0.左边液面下降N 时,«.E, = jpAZx- U = pA XX xg XX由(/(坊 +U) =0可知》pAlx +2gpAx =0IPt 誓 (nd/t), T =江总 <*)X13 求如n 所示系统的辱效Pwj*.井把它9咸与Z 的美JK 敦:•*«的《劭*分方《 ”“伴4“•x2U …上+吗或兰+丄g 2 2 222. 17水ai 与2的水平徽面面积分别 八A «部用«面为4的细*连接• 港面上下嫌动的S«频率. «i 设液体密度为取杀统静平K 时势tt 为(h 当左边液面下降・5时・右边液 C 上升液体在水与2和细■中的速度分别为xpx^xp 则倂=jP A" •人)卅 +-[pA^K^ +-[pA (/i + x )tt^(由于》h ~ x^ h; /j + Xy 力;= 4呂;AX] = AXj )由gEf +U )= 0可知,[/j (i+殳)+L (殳)X + 型1 + 殳兀=0126某单・由度廉统左液体中《动,它所受》的澈》为尸=50COSM (N ), 9统 左畀期时共«■为aooscm,求fi 尼IMS-Ml 由Z'=0.20y 时共《可知,系统B 有频率为> 叫 上=伽n当wTqW, S»W 应《«,才=血,(♦«材P30〉CO )所以t r= -=匹-(AXsVzw )X (o JtWh 叫=I ---Mh (I (rad /t )Al* y[A^ +AX19 试i£W. 对 ttX* 車也可用下式*示5=lln&» (式中斗 S 经过"个備〃 工环肩的拥■)• 井绐出左》尼比0为0.01. 0.1. oa »tWNIM 小94 so%以下所需H 的《1环数•Ml 设承统》尼■由拥劝的响应为MC*厶时W 的位移为竝M 厶=厶+//7时«的位移为儿.Mt•E = _________ 才cos(% _y) ____________________ = /■•略-4^ Ff 5"“'COS[3“aQ + zz7^> — <p]AFrl^^V > In = U"、”7]^ = ZA S = /rin • BO i ?> = — In当和《"J5O% 时—r KI —=和 2=ln2 吗IF< = 0.01 mt. //= 111 ■■•个低环*=0,1 mt , ZZ= 13 I 9 2 个fit 环.歹=0・3时・ zz = o.34 I K 1 个«£FtH ■■为—挂住*■的下*. 产生■ 在上下运动时所iB 刮 的■力f A BraiZ ■悖平准隹■劭. 班■・ 体在■FWCft ■以初屋度 性开给运动. 我■!:后的运动IRd. W >逛糸统上下运动为"生标系・系MS •平伽位■为原点・El 糸聂g 运动■ 分方■%«P P—* ♦ “ ♦ —X ■ O&A糸see ■尼比 « r -—■—2v^r f i尸 p7乔H糸统不《R 动条件为. G N 1 ■ RPx UN"; 爭gjc. u O 斤.—U△二■ 土 w叫 _y/iN 》m $ ■ l»t< Mt) ■人& ~F •M<**a{; ~ 二A<Z> ■i3> m 0 V 1 ・t«*<"■<? '^<<7, eoscd^r 十 €7, sin w^r>■ O ©2 ■ 5 * 3.»3. ■叫 S - S2)当.K(r > = usun 叫*2M 若嫌动徇体受》的》力与X 运动速度平方咸正比• K巧="• x<0/> = ~ax x>0求其等效S 尼系(ft 和共摄时的嫌《■•Ml 实际上,这是一种低帖度流体》尼・设礙统的运动为t -»■(/)= A^co^co/ — <p} 叫=J a"a 龙泊(A I H(w) I iv)(w7 —0)=I a[a I H(w) I M< wf — 9?)J [— | H(w) | wA sin(wt — <p)}Jx "一兮匸 M/Vsin'(fuf —g>}dt w*3乙=^ax^ ayzrV/ = <3r<aF'_ —5< 2-29x=才 cos( ftV —初-r = —co^si n( coz — «>).jT/a今.S A */® *";=I a .>^zZr+ f —or ,i^zZrJ O Jjr Fa=丄 才'sin* (foz — </>)(—ft>*^cos(foZ — + I —sin*(ct>z — 9)(—a*才cos(3/— <p))zZ^ J 疔da“;="2 = Ca"—I —aw^X^ sin'(3f —<pyJt =:zXW[2(0>p -i(Of <p]■统■的•數来*示IM ■片的•Mt iftM 舛的转系饺的磁分方《为・IO + [出 + (Jt, + Jt, )21" ff = k^Ly sin ro/Bittu Jt,=八阮-(Jt, +Jkjz?233如图所示由《架支承的车《沿*低 不平的illfttr 进・试求炉的嫌・与行进速 度的关系.并确定S 不利的行进速度-2,33r= Feos 气匚/-z»vT = —Kl -r- r)H 才=KY cos 宁/ “・才+ A :r = A Z cos 书3“/那册+ QS)=人匕彝7皿宀滋5 3:二北=器血°+兰ysin 叫/2-32 —飞机升的片0接于升阵曲的O*上(BB ^=—2-32>,井由一联动 发■检«!• 0芸■相出于一 mdc 为外的扭<«弹*. iflst 片转动m ■为 /» Binr 系 19^00有頻率3宿=K* / /»IB Bic 丁不te 常w»计興•必烦 朋 试工 测农『%•为此m 定升降舵・利用《• « 4^对*■片做筒iwatJttu 井用弹 賛俎乗MPM. 改蛮激勵噸率e ■至 达到其共拥頻事〜• 试l^ov 和 K 升吟舵 O“ 《正峠 $*■ I 乙 .I I 冬i 7^2.32系统的共1«頻車为.3:工+(K + 出)25J ■ 1«»片的00列«車为,=屁-g + 匕)£?I2.33zv 丄■+ ASl = A r七+2才=3: r>vJv ■_七=x= h / k*oIsTk — T “'呼k —r7V= Z3才=140求单罪抵就藏对畸就鮒絶,设鵬統为亀/0)nta制七丹si 叫//Ml )七产叫恥(/呵他-2)=±si 輒(I)](/rX[i}- "co 叫(/-r)专(co 纠/)< 0=£]±si 叫(/讪1)flflrrX[l}- /;(/)^/-r)z/r+ -你/M(/-M*[co 叫(/-/])卜刽l-co 叫(/-/J]X[t}- 7j(/)Z(/-r)z/r+J-A(/)^/-ryA + 0%-/J0 彳 I.|«旷I II ( *hi■糾=#[co 糾(/-/]) 一cos©/]占[co 叫(/-/J-CO 叫(/一/])]b用冲仞申讨)fl(f r妙抑泊)一册皿/删/.伞■翌 川I 帥J皿寸侧/训+仲/"・M当跑何)卜吶血八i0»/|C用冲弘呻1)f!r加)卡加)吋1咖」/咿訥附W flp腓 如炉M+ 0%/■炸治叫严宀叫I*0J/,"»71fl142 -鞭债“维从-脚角为W 光洲®下為如田癇•求輸与帼 娜rnsmn 躺繃亂Uo = 5/5^in3^ =侮 以劇蝴marni 为原恵 轿方为正,畑艄分方程力 mx + kx = mg sin 30°心丄咖+哩泄(|・叫()肿q 事0 kV/nB蚩话IH 脱前的砒)=0故由I .v (f,) = —sinwj, + 詈(l ・cos (叮|)二0fl可卿心匸呦防輕)V/n y/ng也就翳li§i»开赠細牖艄牺飢考翱羅删林他亿二侮 X = 0。
结构动力学_克拉夫(第二版)课后习题

例题E2-1 如图E2-1所示,一个单层建筑理想化为刚性大梁支承在无重的柱子上。
为了计算此结构的动力特性,对这个体系进行了自由振动试验。
试验中用液压千斤顶在体系的顶部(也即刚性大梁处)使其产生侧向位移,然后突然释放使结构产生振动。
在千斤顶工作时观察到,为了使大梁产生0.20in[0.508cm]位移需要施加20 kips[9 072 kgf]。
在产生初位移后突然释放,第一个往复摆动的最大位移仅为0.16 in[0. 406 cm],而位移循环的周期为1.4 s。
从这些数据可以确定以下一些动力特性:(1)大梁的有效重量;(2)无阻尼振动频率;(3)阻尼特性;(4)六周后的振幅。
2- 1图E2-1所示建筑物的重量W为200 kips,从位移为1.2 in(t=0时)处突然释放,使其产生自由振动。
如果t=0. 64 s时往复摆动的最大位移为0.86 in,试求(a)侧移刚度k;(b)阻尼比ξ;(c)阻尼系数c。
2-2 假设图2- la 所示结构的质量和刚度为:m= kips ·s 2/in ,k=40 kips/in 。
如果体系在初始条件in 7.0)0(=υ、in/s 6.5)0(=υ&时产生自由振动,试求t=1.0s 时的位移及速度。
假设:(a) c=0(无阻尼体系); (b) c=2.8 kips ·s/in 。
2-3 假设图2- 1a 所示结构的质量和刚度为:m=5 kips ·s 2/in ,k= 20 kips/in ,且不考虑阻尼。
如果初始条件in 8.1)0(=υ,而t=1.2 s 时的位移仍然为1.8 in ,试求:(a) t=2.4 s 时的位移; (b)自由振动的振幅ρ。
例题E3-1 一种便携式谐振荷载激振器,为在现场测量结构的动力特性提供了一种有效的手段。
用此激振器对结构施以两种不同频率的荷载,并分别测出每种情况下结构反应的幅值与相位。
由此可以确定单自由度体系的质量、刚度和阻尼比。
《振动习题》课件

认真听讲,做好笔记
学习建议
课后复习,巩固知识
遇到问题,及时请教老师或同学
定期进行习题练习,提高解题能力
展望未来
课件在振动工程领域的应用 前景
课件在教育领域的推广和应 用
振动习题PPT课件的未来发 展趋势
课件在振动工程领域的创新 和突破
汇报人:
动态图表应用:数据分析、 报告展示、教学演示等
公式推导
振动方程:描述 振动系统的运动 规律
振动频率:描述 振动系统的振动 频率
振动幅值:描述 振动系统的振动 幅度
振动相位:描述 振动系统的振动 相位
实例解析
实例1:单自由度振动系统 实例2:多自由度振动系统 实例3:振动系统的响应分析 实例4:振动系统的控制与优化
振动分类
自由振动:物体在无外力作用下的振动
共振:物体在特定频率下产生的振动
受迫振动:物体在外力作用下的振动
自激振动:物体在自身激励作用下的振 动
阻尼振动:物体在阻尼作用下的振动
非线性振动:物体在非线性作用下的振 动
振动方程建立
建立方法:根据牛顿第二定 律和胡克定律推导
振动方程的解:包括自由振 动和受迫振动
动画演示
动画类型:包括 文字、图片、视 频等
动画效果:包括 缩放、旋转、平 移等
动画时间:根据 内容需要调整动 画时间
动画顺序:按照 逻辑顺序进行动 画演示
动态图表
动态图表类型:折线图、柱 状图、饼图、散点图等
动态图表制作:使用Excel、 PowerPoint等软件制作
动态图表:可以展示数据随 时间变化的趋势和规律
,
汇报人:
目录
课件背景
振动习题PPT课件是为了帮助学生更好地理解和掌握振动原理而设计的 课件内容涵盖了振动的基本概念、振动方程、振动分析方法等 课件采用了丰富的多媒体元素,如动画、视频、音频等,以提高学生的学习兴趣和效果 课件还提供了大量的习题和案例分析,帮助学生巩固所学知识,提高解决问题的能力
《结构动力学》-第0章-习题课解读
《例》一质量为M、半径为r的均质实心圆柱体在质 量为m的车子上无滑动地滚动。车辆用弹簧常数为 k1、k 2的弹簧连接,并在水平表面自由滑动。用拉 格朗日方程求系统的运动微分方程。
解:系统的动能为
1 1 1 2 2 2 T mx1 Mx 2 J O O 2 2 2
JO 1 Mr 2 2
[(2k1 k 2 ) m1 2 ] X 1 k 2 X 2 m e 2 2 k X ( k m ) X2 0 2 2 2 1
me 2 (k 2 m2 2 ) X2 2 [(2k1 k 2 ) m1 2 ](k 2 m2 2 ) k 2
第 0章
习题课
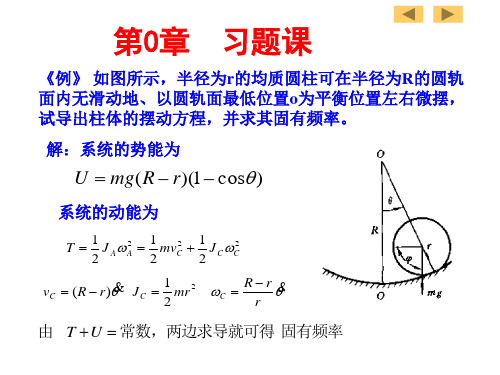
《例》 如图所示,半径为r的均质圆柱可在半径为R的圆轨 面内无滑动地、以圆轨面最低位置o为平衡位置左右微摆, 试导出柱体的摆动方程,并求其固有频率。 解:系统的势能为
U mg( R r )(1 cos )
系统的动能为
T 1 1 1 2 2 2 J A A mv C J C C 2 2 2 JC 1 2 mr 2
干扰力的频率为:
2 n 2 3.14 500 52.3(rad/s) 60 60 动力放大系数为:
1
2 1 2 n
1 3.4 2 52.3 1 62.3 2
梁中点的最大弯矩为:
M max 35 4 3.4 10 4 M M 69kN m 4 4
《例》用第一瑞利商和第二瑞利商求图示系统 的第一阶固有频率估值。
《例》用矩阵迭代法求图示系统的第一阶固有 频率和振型,精确到小数点后两位有效数字。 假设初始振型向量为{1 3 4}。
《例》 一长度为L的杆,一端紧固,另一端用常数为k的 弹簧连结,如图示。推导系统的频率方程。 解:杆的纵向振动一般表达式:
高中物理《简谐运动》微课精讲+知识点+教案课件+习题
知识点:一、简谐运动定义1.机械振动物体在平衡位置附近所做的往复运动叫机械振动。
机械振动的条件是:(1)物体受到回复力的作用;(2)阻力足够小。
2.回复力使振动物体返回平衡位置的力叫回复力。
回复力时刻指向平衡位置。
回复力是以效果命名的力,它是振动物体在振动方向上的合外力,可能是几个力的合力,也可能是某个力或某个力的分力,可能是重力、弹力、摩擦力、电场力、磁场力等。
3.简谐运动物体在跟偏离平衡位置的位移大小成正比,并且总指向平衡位置的回复力作用下的振动,叫简谐运动。
表达式为:F=-kx。
4.描述简谐运动的物理量(1)位移x:由平衡位置指向振子所在处的有向线段,最大值等于振幅;(2)振幅A:是描述振动强弱的物理量。
(一定要将振幅跟位移相区别,在简谐运动的振动过程中,振幅是不变的,而位移是时刻在改变的)(3)周期T:是描述振动快慢的物理量。
频率f=1/T二、理解简谐运动重难点1.平衡位置的理解平衡位置是做机械振动物体最终停止振动后振子所在的位置,也是振动过程中回复力为零的位置。
(1)平衡位置是回复力为零的位置;(2)平衡位置不一定是合力为零的位置;(3)不同振动系统平衡位置不同:竖直方向的弹簧振子,平衡位置是其弹力等于重力的位置;水平匀强电场和重力场共同作用的单摆,平衡位置在电场力与重力的合力方向上。
2.回复力的理解(1)回复力是指振动物体所受的总是指向平衡位置的合外力,但不一定是物体受到的合外力。
(2)性质上,回复力可以是重力、弹力、摩擦力、电场力、磁场力等。
(3)回复力的方向总是“指向平衡位置”。
(4)回复力的作用是使振动物体回到平衡位置。
3.简谐运动(1)简谐运动的判定在简谐运动中,回复力的特点是大小和位移成正比,方向与位移的方向相反,即满足公式F=-kx。
所示对简谐运动的判定,首先要正确分析出回复力的来源,再根据简谐运动中回复力的特点进行判定。
(2)简谐运动的特点周期性:简谐运动的物体经过一个周期或n个周期后,能回复到原来的运动状态,因此处理实际问题时,要注意多解的可能性或需定出结果的通式。
结构动力学教学课件(共10章)第10章 结构动力学专题
··
∑ () + ∑
··
·
+2ζnωn + qn=-=
∑
=
=+
··
()
()
(10-19)
上式可简记为
··
·
··
··
+2ζnωn + qn=- + (10-20)
力位移。
由于[Kg]表示因支承单位位移在自由节点上产生的力,而[K]表示自由节点单位位移所产生的
力,因此{us}和{ug}满足条件
[K]{us}+[Kg]{ug}={0}(10-4)
由此可得到{us}和{ug}的关系为
{us}=-[K]-1[Kg]{ug}(10-5)
10.1
10.1.1
结构地震反应分析中的多点输入问题
点地震动输入下结构总的反应为
{ua}={us
}+{u}=-[K]-1[K
g]{ug}+
∑ {ϕ}nqn(t)
=
= ∑ [Egl]ugl+∑{ϕ}nqn(t)(10-15)
=
10.2
10.2.1
结构地震反应分析中的多维输入问题
非对称结构在多维地震输入时的振型叠加法
计算非对称结构在多维地震动作用下的反应时,在刚性楼板假定前提下通常每层考虑三个自
式(10-7)右端第二项表示结构与支座的阻尼耦联,由于比较小,通常可忽略。同时,根据式(10-4)和
式(10-5),则式(10-7)可简化为
··
{Peff(t)}=([M][K]-1[Kg]-[Mg]){ }(10-8)
structural vibration analysis and damping -回复
structural vibration analysis and damping -回复题目: 结构振动分析与阻尼导言:结构振动是工程领域中一个重要的研究领域。
振动分析有助于我们了解结构在受到外部激励时的响应,并且可以帮助我们设计更加稳定和可靠的结构。
在这篇文章中,我们将探讨结构振动分析的基本原理和应用,并讨论阻尼在结构振动中的作用和重要性。
第一部分:结构振动分析的基本原理1.1 结构振动的定义结构振动是指结构在受到外部力或激励时发生的连续或间断的周期性运动。
它可以分为自由振动和强迫振动两种形式。
1.2 结构振动的基本方程结构振动可以通过二阶微分方程来描述。
通常,我们使用质量矩阵、刚度矩阵和阻尼矩阵来表示结构的动力学特性。
结构振动的基本方程可以写为: M*d^2u(t)/dt^2 + C*dx(t)/dt + Ku(t) = F(t)其中,M表示质量矩阵,C表示阻尼矩阵,K表示刚度矩阵,u(t)表示位移矢量,dx(t)/dt表示速度矢量,F(t)表示外部激励矢量。
1.3 结构振动分析的步骤结构振动分析的一般步骤包括:几何建模、材料特性、边界条件定义、求解框架刚度矩阵和质量矩阵、计算特征值和特征向量,以及分析振动模态和响应。
第二部分:阻尼在结构振动中的作用2.1 阻尼的定义阻尼是指能将结构振动能量转化为其他形式的现象。
包括结构内部材料的内阻、结构与介质之间的耗散和结构与外界环境之间的能量交换等。
2.2 阻尼的类型阻尼可以分为三种类型:粘性阻尼、干摩擦阻尼和耗散阻尼。
2.3 阻尼的影响阻尼对结构振动的影响是多样的。
首先,阻尼可以改变结构振动的特征频率,使得结构摆脱某些激励频率的共振。
其次,阻尼还可以减小结构振动的幅值,降低结构疲劳和损伤的风险。
第三部分:阻尼在结构工程中的应用3.1 阻尼器的设计阻尼器是用来改变结构振动特性的装置。
它们可以在机械系统中引入适当的阻尼,以减小结构的振动幅值。
常见的阻尼器包括贮能阻尼器、液态阻尼器和摩擦阻尼器等。
《结构动力学与计算方法-王生》第12章结构振动实验基础(第12章)

一般应考虑的问题
c.下列情况可采用加速度测量: • 高频振动,因而加速度输出较大的场合。 • 在需要分析力、动载荷和应力的地方。因
为加速度是和动载荷有关的。 • 因为空间有限制,或结构本身的尺寸和重
量不大,需考虑采用质量较小的加速度计, 因而需按测量加速度的要求来考虑。
二、振动基本参数的测量
1.简谐振动频率的测量
首先,将结构物在静止状态下进行人为激振,通过测量激振力与振动响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点 之间的机械导纳函数(传递函数)。
两个频率相同的波形之间的相位差值。
• (3)模拟振动条件,对产品(结构与仪表)进行 首先明确所测参数的定义、测量要求、应测的量列清楚,弄清各量的关系,把分析计算公式事先写好; 耐振性能试验检测,为改进产品设计提供依据。 而支持这个过程的除了激振拾振装置、双通道FFT分析仪、台式或便携式计算机等硬件外,还要有一个完善的模态分析软件包。
模态分析提供了研究各种实际结构振动的一条有效途径。
• (4)标定试验,即对振动测试用的仪器进行各种 (5)确切弄清各仪器的灵敏系数,必要时应作系统标定。
试验结果可以用来检验理论模型的正确性,修正理论模型;
参数的标定,以确定仪器的使用范围及灵敏度参 振动模态是弹性结构的固有的、整体的特性。
模型实验:模型设计 满足相似条件。
(1)利萨如图形法 测量简谐振动的频率。
测量的信号变为电压信号,输入到示波器 的y轴,再用信号发生器输入一个正弦电 压信号,输入到示波器x轴,当它与被测 信号频率相等时,示波器荧屏上即出现 一个椭圆(运动方向垂直的两个简谐振 动的合成运动的轨迹)。
• (2)电子计数电压信号 后输入电子计数器(数字频率计),可直 接读出其频率值。方法简便,具有较高的 精度、稳定性。不仅限与简单的谐波形的 测量。
机械振动与机械波-清北学堂-2018寒-答案2

2 T
o
2 A cos[ 0 (t 0 n) 0 ] A cos[ 0 (t nT ) 0 ]
叫做周期,每隔T 时间运动完全重复
1 0 称为振动频率,单位时间内振动的次数。 T 2
2 k 称为角频率(或圆频率)
o Tm
Asin(0t 0 / 2) Asin(0t 0 ')
9
两个同频率简谐振动的相位差:
(0t 20) (0t 10) 20 10
0 20超前10
20 10 0 20落后10
=(2n1) 反相
=2n 同相
10
5
F回 m 2 x kx
中学生物理竞赛讲义
兴趣在于培养 习惯在于养成
1
第十讲 机械振动和机械波
清北学堂 主讲:南开大学 张天浩教授
2
1
考纲
10.振动
简谐振动 振幅 频率和周期 相 位 振动的图像 参考圆 简谐振动的速度 (线性)恢复力 由动力学方程确 定简谐振动的频率 简谐振动的能量 同方向同频率简谐振动的合成 阻尼振动 受迫振动和共振(定性 了解)
6
3
简谐振动的运动学描述
k
以弹簧振子为例
m X
系统的位移按
ox
x(t ) A cos( 0 t o )
的规律运动,其中 0由系统自身决定。
结论:
简谐振动——凡是以时间的正弦或余弦函 数表示的运动都是简谐振动。
7
简谐振动的周期和频率、振幅
A cos( 0t 0 ) A cos( 0t 0 2n)
l
l
2mg
x
l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L 0
多自由度系统习题
即
2 2 2
2
2
5 5 0 5 11
其中
m h3 1 方程为
3 182 54 2 36 3 0
解出
1 14.43 , 2 2.62 , 3 0.954
3
其中
EJ p1 9.979 3 mh
EJ p2 55.07 3 mh
EJ p3 151 3 mh
多自由度系统习题
5. 在题3的三层楼建筑中,假定地面的水平运动加速度
s a sin t x
试求各层楼板相对于地面的稳态水平强迫振动。 解:在习题3中已求得系统的正则振型矩阵和质量矩阵分别为
式中,V为贮存在弹簧中的势能 多自由度系统习题
由拉格朗日方程得 d ( T ) mq1 dt q1
d T ( ) mq2 dt q2 d T ( ) I o q3 dt q3
T 0 q1
T 0 q3
T 0 q2
V k1 (q1 bq3 ) k1 (q1 dq3 ) q1
m 0 0 M 0 m 0 0 0 m
0.8361 0.2149 0.5049 1 AN 0 . 4927 0 . 6848 0 . 5390 m 0.8432 0.5278 0.1017
当作用于第三层楼水平方向的静载荷P忽然去除时,相当于 受到了初始条件的激励,即 0 2 3 2 2 2 0 Ph 3 x x0 5 0 h 144EJ 2 5 5 0 11 144EJ 2 5 11 12.168 模态坐标初始条件为 3 Ph m T 1 . 379 x N (0) A N Mx 0 = 144EJ T 0.099
N (0) A N Mx 0 x
多自由度系统习题
模态坐标的响应为
12.168cos p1t Ph m xN 1 . 379 cos p t 2 144EJ 0.099cos p3 t
3
2) 3) 1) x N 2 A (N xN3 变换回物理坐标响应为: x A (N x N1 A (N
同理求出其余各列。最后得到柔度矩阵为
2 2 2 h 2 5 5 144EJ 2 5 11
3
系统的质量矩阵为
m 0 0 M 0 m 0 0 0 m
根据达朗贝尔原理,得到系统的方程为
x1 h3 x 2 144EJ x3
EJ m h3
解出固有频率为
EJ p1 9.979 3 mh
p2 55.07
EJ p3 151 3 mh
多自由度系统习题
当系统自由度数不太大时(如N=2~4),可以采用下列求伴随矩 阵的方法求解固有振型:由振动方程
[k ]{X } [m]{X }
由特征方程 [k ] [m] 0
V k1b(q1 bq3 ) k1d (q1 dq3 ) ak2 (q2 aq3 ) ak2 (q2 aq3 ) q3
V 2k2 (q2 aq3 ) q2
则运动方程为
1 2k1q1 k1 (b d )q3 0 Mq
2 2k 2 q2 2ak 2 q3 0 Mq
EJ1 3EJ
EJ 2 2EJ
EJ3 EJ
x1
x2 x3 为相对地面的坐标。
求出系统的固有频率和按模态质量为一归一化后振型矩阵。 多自由度系统习题
解:由材料力学知,当悬臂梁自由端无转角时,其梁的等效刚度为
12 EJ k 3 由此可将题图等效为右图所示的质量弹簧系统,其中 l
12EJ1 k1 2 h13
3 k1 (b d )q1 2ak2 q2 (b 2 d 2 )k1q3 2a 2 k 2 q3 0 IGq
因此系统具有三坐标耦合的运动方程。 多自由度系统习题
,
,
3 上图表示一座带有刚性梁和弹性立柱的三层楼建筑模型。 假设:
m1 m2 m3 m
h1 h2 h3 h
0.2149 0.5049 0.8361 1 AN 0 . 4927 0 . 6848 0 . 5390 m 0.8432 0.5278 0.1017
m 0 0 M 0 m 0 0 0 m
由题意,在相对坐标系下,基础激励相当于施加作用力为
2 2 2 2
计算拉格朗日方程中的各项导数如下:
多自由度系统习题
1
q1 x1
d T T m x ; 0 1 1 dt x x 1 1 V k1 x1 k 2 ( x 2 x1 ) (k1 k 2 ) x1 k 2 x 2 x1
1
2 2 2 m 2 5 5 0 2 5 11 0
0 1 x x m 0 2 x 0 m 3 0
1 由特征方程有 [k ] [m]{X } 2 { X } p 1 1 L [ k ] [ m ] I ,得频率方程 构造特征矩阵有 2 p
分别代入特征值,得到主振型矩阵为
1.000 1.000 1.000 A 2 . 295 1 . 377 0 . 645 3.929 1.037 0.1220
0 0 21.6508m M P A T MA 0 3 . 9243 m 0 0 0 1.4303 m
展开得到
2.616cos p1t 0.702cos p 2 t 0.083cos p3t Ph x 5 . 999 cos p t 0 . 938 cos p t 0 . 053 cos p t 1 2 3 144EJ 10.258cos p1t 0.727cos p 2 t 0.010cos p3 t
12EJ 2 k2 2 3 h2
12EJ 3 k3 2 3 h3
1 k1
广义坐标如图示。利用柔度影响系数法求柔度矩阵。 即对m1施加单位力,其余不受力,此时第一个弹簧变形为 第二和第三个弹簧变形为零。由此可得各坐标位移为, 1 11 k1 1 21 k1 1 31 多自由度系统习题 k1
i
记adj[Qi]的任意一列为{i},则
[Qi ] {i } ([k ] i [m]){ i } {0}
{i } {X i }
因此 [Qi ] adj[Qi ] [0] 多自由度系统习题
证毕
对于本例,由特征矩阵的伴随矩阵的第一列
(5 )(11 ) 251 2 adjL 10 2 2 (11 ) 10 2 2 (5 )
写成矩阵形式:
m1 0 m 0 0 0 m2 0 0
kq 0 mq
0 0 m3 0 0 0 0 m4
其中
k1 k 2 k2 k 0 0
k2 k2 k3 k3 0
0 k3 k3 k4 k4
然后设
([k ] [m]){X } {0}
解出特征值i与固有频率pi
[Qi ] [k ] i [m]
可以证明[Q]阵的伴随矩阵adj[Q]的任意一列,就是 相应于 i的特征向量,即是固有振型{Xi}
[Q] [k ] [m] [Q][Q]1 [ I ]
[Q] adj[Q] [Q] [I ] 当 i [Q ] 0
q2 x2
d T 2 dt x
T m x ; 0 2 2 x 2
V k 2 ( x 2 x1 ) k 3 ( x3 x 2 ) k 2 x1 (k 2 k 3 ) x 2 k 3 x3 x 2 q3 x3 d T T m x ; 0 3 3 dt x x 3 3 V k 3 ( x3 x 2 ) k 4 ( x 4 x3 ) k 3 x 2 (k 3 k 4 ) x3 k 4 x 4 x3 q4 x4 d T 4 dt x T m x ; 0 4 4 x 4
归一化振型的第i列为 A
i N
1 Mi
Ai
0.8361 0.2149 0.5049 1 AN 0 . 4927 0 . 6848 0 . 5390 m 0.8432 0.5278 0.1017
由此得到归一化以后的振型矩阵为
多自由度系统习题
4 . 试确定题3中三层楼建筑框架由于作用于第三层楼水平方 向的静载荷P忽然去除所引起的自由振动响应。 解:在上题中已求得系统的质量矩阵和固有振型矩阵分别为
0 0 k4 k4
q T x1 x2 x3 x4
多自由度系统习题
2 为了隔离机器产生的振动,将机器安装在一大的基座上, 基座由弹簧支承,如下图所示。试求机器和基座在图示平面 内的运动方程。
多自由度系统习题
解: 选择坐标q1、q2、q3,这些坐标已能完全描述该系统的运 动,并相互独立。设机器和基座的总质量为M,总质量对质心G 点的惯性矩为IG,则
坐标与弹簧变形量之间 关系为:
1 1 1 2 2 2 1 2 3 T Mq Mq IGq 2 2 2
x1 q2 aq3 x2 x3 0
y1 y4 0
x4 q2 aq3
y2 q1 bq3 y3 q1 dq3
1 1 1 1 2 2 2 V k1 (q1 bq3 ) k1 (q1 dq3 ) k 2 (q2 aq3 ) k 2 (q2 aq3 ) 2 2 2 2 2