ABB阀门定位器
ABB气动执行机构定位器调试步骤

ABB气动执行机构定位器调试步骤ABB气动执行机构定位器是一种用于控制阀门开闭的装置,其主要作用是将气动执行机构的运动转换为阀门的旋转或线性运动,完成阀门的开闭动作。
在实际应用中,正确调试气动执行机构定位器是确保阀门正常运行的重要环节。
以下是ABB气动执行机构定位器调试的步骤以及注意事项。
步骤一:安全准备在调试之前,首先需要做好安全准备工作。
包括穿戴个人防护装备,如安全帽、防护眼镜和手套等。
确保所有电源和压缩空气的供应已经接通,并检查执行机构和定位器的状态是否正常。
步骤二:调整气动系统在进行调试之前,需要先进行气动系统的调整。
这主要包括调整空气压力和流量,确保气动执行机构的动力源得到充足的供应。
也需要检查阀门、过滤器和压力调节器等气动元件是否正常工作。
步骤三:安装定位器按照要求将定位器安装在气动执行机构上。
确保定位器与气动执行机构连接牢固,并且接口处无泄漏。
调整定位器的位置,使得其能够准确地感知气动执行机构的运动。
步骤四:连接电气控制系统将定位器与电气控制系统进行连接。
包括连接电源和输入输出信号线。
确保连接正确,避免短路和接线错误。
步骤五:调试定位器开始实际调试工作。
首先需要设置定位器的运动范围和动作方式。
根据阀门的要求,设置定位器的行程和速度。
然后进行手动操作,观察定位器的工作状态。
如果有异常情况,如运动不流畅或无法准确停止等,需要进行相应的调整。
步骤六:校准位置反馈定位器通常具有位置反馈功能,可以将阀门的实际位置反馈给控制系统。
在调试过程中,需要校准位置反馈。
可以通过手动操作阀门,观察反馈信号的变化,然后调整定位器的位置反馈参数,使得反馈信号与阀门的实际位置一致。
步骤七:自动调试完成手动调试后,可以进行自动调试。
通过控制系统对定位器进行远程控制,进行开关测试和位置调整。
观察阀门的动作是否准确,并调整相关参数以达到预期的效果。
步骤八:测试和调整在完成自动调试后,需要进行测试和调整。
通过开关测试和阀门操作测试,观察阀门的工作情况是否正常。
ABB智能定位器
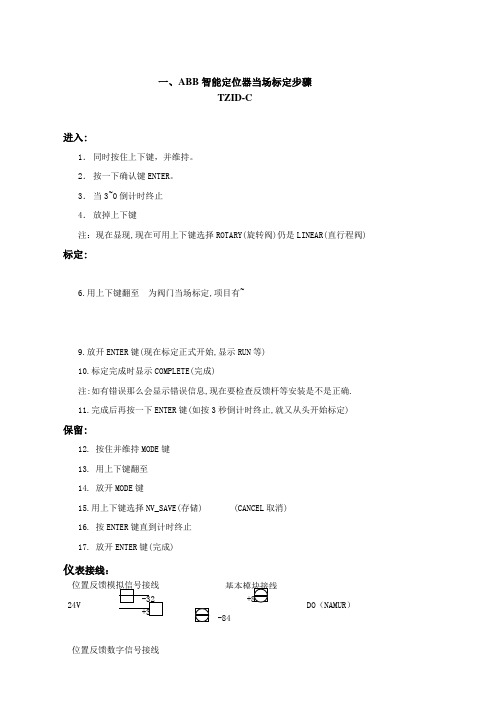
24V-84一、ABB智能定位器当场标定步骤TZID-C进入:1.同时按住上下键,并维持。
2.按一下确认键ENTER。
3.当3~0倒计时终止4.放掉上下键注:现在显现,现在可用上下键选择ROTARY(旋转阀)仍是LINEAR(直行程阀)标定:6.用上下键翻至为阀门当场标定,项目有~9.放开ENTER键(现在标定正式开始,显示RUN等)10.标定完成时显示COMPLETE(完成)注:如有错误那么会显示错误信息,现在要检查反馈杆等安装是不是正确.11.完成后再按一下ENTER键(如按3秒倒计时终止,就又从头开始标定)保留:12. 按住并维持MODE键13. 用上下键翻至14. 放开MODE键15.用上下键选择NV_SAVE(存储) (CANCEL取消)16. 按ENTER键直到计时终止17. 放开ENTER键(完成)仪表接线:位置反馈数字信号接线DO(NAMUR)SW1-52 +51 SW224V-82+11 -12二、ABB 智能定位器当场操作步骤选择操作模式:模式:自适应操纵1、 按住并维持MODE 键2、 另外按3、 显示4、 放开5、 显示自动运行状态模式:修正操纵 1、 按住并维持MODE 键切断功能接线 4~20MA 信号DI (12V )2、 另外按3、显示4、放开五、显示强制操纵正在运行模式:行程范围内手动调整 一、按住并维持MODE 键 2、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是0%~100%的阀位六、按 或 在行程范围内调整定位器模式:行程范围内手动调整 一、按住并维持MODE 键 3、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是阀门转角(注1)六、按 或 在行程范围内调整定位器注1:直行程必需在-280~280之间,角行程必需在-570~570之间。
三、阀位与行程反馈不对应解决方式如图1所示,定位器的原理是气缸的角位移通过‘中间连接件’传递给‘反馈轴’,反馈轴上的‘传动齿轮’去带动反馈电机,测得的反馈电势与输出维持平稳。
ABB阀门定位器
阀门定位器1.阀门定位器的分类和用途:(1).阀门定位器是调节阀的主要附件,它与气动调节阀配套使用,接受调节器的输出信号,然后输出信号去控制气动调节阀,当调节阀动作后阀杆的位移又通过机械装置反馈到阀门定位器,定位器与调节阀组成一个闭环回路。
电—气阀门定位器作用图阀门定位器按其结构形式和工作原理分成气动阀门定位器、电—气阀门定位器和智能阀门定位器。
阀门定位器能够增大调节阀的输出功率,减少调节信号的传递滞后,加快阀杆的移动速度,能够提高阀门的线性度,克服阀杆的摩擦力并消除不平衡力的影响,从而保证调节阀的正确定位。
﹙1﹚用于高压介质﹙2﹚用于高压差﹙3﹚用于高温或低温﹙4﹚用于介质中含有固体悬浮物、沾性流体、含纤维、易结焦的场合。
﹙5﹚增加执行机构的动作速度﹙6﹚用于调节阀口径较大的场合。
﹙7﹚实现调节阀反向动作﹙8﹚改善调节阀的流量特性﹙9﹚用于分成调节控制﹙10﹚用于智能控制电—气阀门定位器输入信号为4~20mA的直流信号,输出气压信号.它能够起到电气转换器和气动阀门定位器两种作用.它接受调节器来的信号,变成气压信号和调节阀配套使用.智能电—气阀门定位器用途:用于控制气动直行程或角行程的调节阀,实现阀门的准确定位,它接受来自调节器或控制器或控制系统的电流信号,用这个信号改变执行机构气室的压力,使阀门的位置达到给定值.它由微处理器(CPU)、A/D和D/A转换器、压电导向控制的气动阀等部件组成,其优点是:(1)用压电控制阀取代了喷嘴挡板机构,给定值和实际值的比较纯是电信号,不再是力的平衡,大大提高了可靠性,降低了耗气量;(2)采用微控制器,实现了智能化。
通过软件组态,可实现多种功能,如:自动调整零点和行程,大大节约了投运时间;自动修改控制参数,补偿机械摩檫的变化和填料老化所造成的问题,达到最好的控制效果;设定调节阀的正、反作用方向;设定调节阀的流量特性(线性、等百分比或任意特性);提供4~20毫安阀位反馈信号;阀位报警、故障报警功能。
ABB阀门定位器自动校验调试步骤

步骤
操作方法
1、进入主菜单
同时按住⇧和⇩键,并点ENTER键松再开。等待3秒钟,计数器从3计数到0。松开⇧和⇩键。程序自动进入P1.0配置菜单
2、定位器安装形式的选择
程序自动进入P1.0配置菜单前提下:使用⇧和⇩键选择定位器安装形式为直行程或角行程。(1、角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心, 一般角位移为90º。2、直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。)
4、阀门正反作用的调整
1、子菜单选择
同时按住MODE和ENTER两键,点击⇧键。显示器显示“P2._SETPOINT”。松开MODE和ENTER两键。显示器显示“P2.0 MIN_PGE”
2、按住MODE键。点击⇧键3次。显示器显示“P2.3-ACTION”,松开MODE键。点击⇧键选择“REVERSE”
3、自动校验
1、按住MODE键,点击⇧键一次,直到显示出“P1.1”。
2、按住ENTER 键直到计数器倒计数到0,松开ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号,自动MODE键。点击⇧键,直到显示出“P1.4”按住ENTER进入保存项,点击⇧键、⇩键,选NV-SAVE,按ENTER键。
3、切换至“P2.7 EXIT”存储并退出(如软件版本是2.0以上,则切换“P2.8 EXIT”)
(1)按住MODE键。(2)点击⇧键多次直至显示器显示“P2.7 EXIT”。(3)松开MODE键。(4)用⇧或⇩键选择 NV_SAVE。(5)按住ENTER 键直到计数器倒计数结束后松开。
阀门定位器培训ABB

按住MODE键。 并同时点击↑或↓键,直到操作模式代码1.3显示出来。
松开MODE键
使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。 两个角度应符合下列推荐角度范围
直行程应用范围在-20°---+28°之内。
角行程应用范围有-57°---+57°之内。(-45°---+45°,开“-”关“+”) 全行程角度应小于25°
© ABB Group October 15, 2015 | Slide 17
经过对多个故障的定位器解题检查分析,发现汽缸故障是导致定位器故障的最常见 原因,主要是膜片漏气,膜片与柱体接触部位偏斜,膜片上下动作不灵活,导 致定位器汽缸动作不正常
常见故障类型对策分析: 定位器输出动作缓慢甚至不动,但排气正常,一般都是由于进气口滤网堵塞严 重(很少见),最常见的原因为定位器汽缸内部故障,见上图分析内容。 执行器自己乱动,或者阀位与指令存在不固定的偏差,主要原因为定位器自动 控制模式选择不合适,将控制模式由1.1修改为1.0即可,实在不行的话可以重 新整定定位器。一般情况下选择1.0进行远方自动控制。只有在执行器实际行程 非常小而执行器速度太快,控制发生振荡时选择1.1控制模式,但其控制精度较 低。 新更换的定位器送电送气后操作不动,无论远方还是就地都不行。这是正常现 象,需要整定定位器,整定结束后就可以随意动作。尤其是第一次使用的定位 器,往往会出现这种情况。 注意从定位器输出接口到汽缸之间的气源管路和汽缸本身,都不能出现泄露情 况,否则可能较大幅度引起执行器动作不正常。
+31
+41 +51 +81 +83 +41 +51
ABB定位器常见故障及分析
ABB定位器常见故障及分析 1、ABB定位器手动自动均只能关不能开?
能关表示是可以排气,不能开表示是没有气进去给气动 执行器,此时需检查: ①气源压力 ②管路接头是否有渗漏 ③定位器进气活塞处堵塞 ④检查定位器锁气阀是否故障 ⑤检查电磁阀是否得电。
4
ABB定位器常见故障及分析 2、ABB智能定位器给定100%的信号,过段时间,气缸会 慢慢下滑到90%左右,给定没变,但反馈和现场的实际动 作变了? ①检查气源管路是否有渗漏 ; ②就地气动执行机构本身膜片处渗漏 ; ③定位器处于手动状态,远方指令无法送达就地。
ABB定位器常见故障及分析
7/6/2021
生产计划部
一、ABB定位器简介 二、ABB定位器常见故障及分析
Page 2
ABB定位器简介 ABB阀门定位器是一种具备通信能力、可电子配置参数的定位 器,可安装于直行程或角行程执行机械上。其主要结构如右下 图所示。
①直行程应用范围在 -28º--+28º之内。 ②角行程应用范围在 -57º--+57º之内。 ③全行程角度应不小于25º
谢谢大家
06.07.2021生产计源自部5ABB定位器常见故障及分析 3、调节阀经常出现调节阀自动关闭,几秒钟后自动恢? ①检查就地环境温度是否过高导致CPU板卡不稳定 ; ②更换AO卡 ; ③重新整定调试 。
6
ABB定位器常见故障及分析 4、指令与反馈相反? ①检查就地阀门开关是否相反 ; ②进入功能键P3.2 ZERO_POS 起始点方向设置(预设 为全关即返馈杆逆时针方向)设置保存后重启 ;
9
ABB定位器常见故障及分析 7、调节阀不能全开,自整定超时,报“OUT OF RANG” ? ①查看定位器角度是否超出角度量程范围:直行程应用 范围在 -28º--- +28º之内,角行程应用范围在 -57º--+57º之内,全行程角度应不小于25º; ②重新走自整定 ;
ABB阀门定位器说明书
TZID-C 智能定位器安装及操作说明书ABB (中国)自动化有限公司仪器仪表总部Tel************Fax************气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
ABB定位器详细说明书
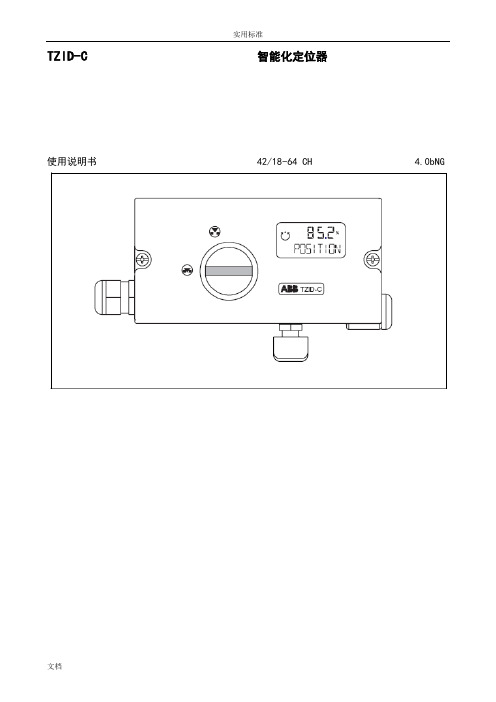
TZID-C智能化定位器使用说明书42/18-64 CH 4.0bNGM6螺丝M5螺丝0 简要操作说明阅读并遵守这些操作说明书第1章中的安全指示。
注意机械安装参见折页图气动连接·连接空气供应与进口端。
空气供应范围应在1.4至6巴之间(20至90 psi)。
注意:不得超过执行器的最大压力!·连接执行器供应与OUT1端口(对双作用执行器还需连接OUT2端口)。
电气连接·按照下列端子名称进行电气连接:模拟输入, 4...20 mA信号模拟输出, 位置反馈,4...20 mA信号*数字位置反馈,SW1 *数字位置反馈,SW2 *数字输入数字输出,报警触点数字位置反馈组件,极限2*数字位置反馈组件,极限1*关机模块*数字位置反馈组件,24 V微型开关,极限1,NC触点*数字位置反馈组件,24 V微型开关,极限1,NO触点*数字位置反馈组件,24 V微型开关,极限1,输入*数字位置反馈组件,24 V微型开关,极限2,NC触点*数字位置反馈组件,24 V微型开关,极限2,NO触点*数字位置反馈组件,24 V微型开关,极限2,输入** 选项调试1. 打开定位器的空气供应。
2. 把4...20 mA模拟输入信号施加在定位器上。
3. 检查安装是否正确:- 按住MODE。
- 此外,短暂地按下或,直至显示模式1.3(在传感器范围内手动调节)。
- 放开MODE。
- 按下或,使执行器移动到其机械限位挡块处(两个方向),并记录数值。
旋转角度以度数表示。
建议采用的限位挡块位置:> -28°且< +28°,对于直线式执行器> -57°且< +57°,对于旋转式执行器最小角度:25°4. 切换到配置级别:- 同时按住和。
- 此外,短暂地按下ENTER。
- 等待,直至从3到0的倒数完成。
- 放开和。
装置会自动进入参数组P1。
5. 选择执行器类型(参数P1);用或选择ROTARY或LINEAR。
ABB自动化产品有限公司智能阀门定位器EDP 300系列防爆合格证说明书
( T6 I T55'C)
83- 84
数午轿出
(T4 / TA100 'C) 83-842
数宁输出
(T6 /T55'C) 85 - 86
紧急切断
蚁腐输入电斥
Ui(V) 30 28 30 28 30 28
30
28 30 28 30 28 30
蚾人愉入电流
l1(mA)
320
最大输入功率
Pi(W)
数如下 :
端子代号
11 - 12 4~20mA(自 习 81 - 82 数字输入 83 - 84 数字输 出 85-86 紧急切断 31 - 32 模拟反馈 21 - 22 通 用输入
41 - 42 / 51 - 52 数字反馈 41 - 42 / 51 - 52 限 位开 关
鼓大电气参数
30V, 22mA 30V 30V 30V
三、制造厂责任 1 产品制造厂必须将上述产品安全使用特殊条件和 产品使用注意事项纳 入该产品使用说
明书 ;
2 制造厂必须严格按 照 N EPS I 认 可的 文件资料生产 ; 3 产品铭牌 中 必须补充 下列 内容 : 3.1 NEPSI 认 可标志 3 . 2 防爆合格证号
产 品 最大使用坏埮温度范围与防煤标志中温度组别的对应关 系 如下所示 :
温度组 别 最大使用环境温度范围 ( .C)
T6 / T55 -40 'C~+4o·c
T4 /T100 - 4o•c~ +as·c
EDP300 N1 系列定位器符合下列标准要 求:
GB3836.1 - 2010
爆炸性环境第 1 部分 :设备 迪用要 求
which are specified in the attachment to this certificate. 3.Model d_esignation is specified in the attachment to this certificate.
ABB阀门定位器整理调试
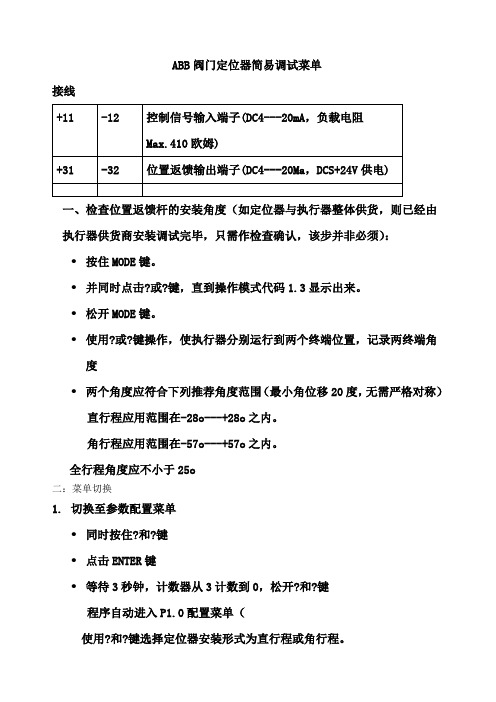
ABB阀门定位器简易调试菜单接线一、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):∙按住MODE键。
∙并同时点击?或?键,直到操作模式代码1.3显示出来。
∙松开MODE键。
∙使用?或?键操作,使执行器分别运行到两个终端位置,记录两终端角度∙两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在-28o---+28o之内。
角行程应用范围在-57o---+57o之内。
全行程角度应不小于25o二:菜单切换1.切换至参数配置菜单∙同时按住?和?键∙点击ENTER键∙等待3秒钟,计数器从3计数到0,松开?和?键程序自动进入P1.0配置菜单(使用?和?键选择定位器安装形式为直行程或角行程。
角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心,一般角位移为90o直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60o,用于驱动直行程阀门气动执行器。
)注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
出厂时的缺省设置为:linear2、从配置功能菜单中选择第其它组参数∙同时按住MODE和ENTER两键∙点击?键∙显示器显示“P2._SETPOINT”∙松开MODE和ENTER两键显示器显示“P2.0MIN_PGE3、各组参数选择∙按住MODE,点击?键选择项。
∙存储按住MODE键点击?键一次或多次,直到显示出“EXIT”松开MODE键用?或?键选择NV_SAVE(若选择‘CANCEL’,此前所作修改将不予存储。
) 按住ENTER键3秒直到计数器倒计数结束后松开三:启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):方法1:∙按住MODE键∙点击?键一次或多次,直到显示出“P1.1”∙松开MODE键∙按住ENTER键直到计数器倒计数到0∙松开ENTER键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
ABB智能电气阀门定位器EDP300

安装类型
根据标准,安装到直行程执行机构 按 DIN/IEC 534(NAMUR 的附加标准)进行侧装。ABB 所供 安装组件为一整套安装材料,但不包括螺纹管接头和气管
整体安装到控制阀上 EDP300 还可采用整体安装。 所需的孔位于定位器的背部。 这 种设计的优点在于:定位器和执行机构进行内部连接。可以保 护机械量程测量点,并且无需使用外部管件。
区域类别 执行机构 操作 工艺 传感器 电子设备 配置
说明 影响阀门或气动执行机构的诊断消息 影响定位器工作的诊断消息 与工艺相关且显示问题或状态的诊断消息 报警,用于通知影响阀门位置读数的问题 显示设备中电子设备的错误 如果定位器配置缺失或错误,则进行检测
柱状图记录 - 定位超时 - 阀门动做 - 阀门行程 - 最常用的阀门位置 - 通用输入
容差带
当位置偏差到达容差带后,位置偏差还会被修正,但会以更为 缓慢的速度反复调节位置,直到达到死区。 死区(敏感度) 当位置偏差到达死区时,位置被保持。
终端位置
根据执行机构打开或关闭的动作方向,来调节显示(0 或 100 %)。 诊断 PositionMaster EDP300 工作程序中执行着多种用于长期运行监 测的功能。下列状态将被检测到并被指示出来,例如: - 设定值信号不在 0 ...100 % 或 4 ...20 mA 范围内 - 位置不在设定的调节范围内 - 定位超时(可调时间参数) - 位置控制器失效 - 累加器超限(可通过 DTM/EDD 在诊断界面设定)
图 6:打开定位器,查看 LCD 指示器
具有 4 个按钮的内置式 LCD 指示器支持如下功能: - 运行监控 - 在线操作过程中的人工干预 - 设备配置 - 全自动调试 - 显示诊断消息
LCD 显示器
ABB阀门定位器操作说明
ABB阀门定位器操作说明一、产品概述二、产品组成1.定位器本体:负责接收控制信号,通过内置电机或气动装置驱动阀门转动。
2.阀门连接装置:用于与阀门连接,将定位器的运动传递给阀门。
3.控制电路:负责处理输入信号,驱动定位器运动,并将执行情况反馈给控制系统。
4.参数调节装置:用于调节定位器的灵敏度、行程等参数。
三、产品使用方法1.链接阀门:首先将阀门连接装置安装到阀门上,确保连接牢固。
2.连接电源:将定位器的电源连接到适配的电源插座中,确保电源正常供应。
3.设置参数:按照实际需求,通过参数调节装置,调节定位器的灵敏度、行程等参数。
参数调节具体方法见附带说明书。
4.输入控制信号:将控制信号输入到定位器的控制电路中,可以通过电流信号或者空气信号进行控制。
具体信号类型和输入方法,请参考附带说明书。
5.操作阀门:通过控制信号,定位器会根据输入信号的变化,控制阀门的开关和调节。
根据实际需求,可以通过控制信号调整阀门的位置。
四、注意事项1.在安装和操作前,请先阅读附带的产品说明书,并确保根据说明进行正确操作。
2.在连接和调节过程中,请确保电源已经关闭,以免发生电击危险。
3.在操作过程中,请注意防止水、油、灰尘等杂质进入定位器内部,以免影响正常使用和降低使用寿命。
5.定位器内部的维修和保养应由专业人员进行,切勿私自拆卸或进行其他操作,以免造成损坏或安全事故。
6.长期不使用时,请及时切断电源,并进行适当的保养,以确保产品的正常使用和延长使用寿命。
五、产品维护保养1.定期检查定位器连接部分和阀门连接部分,确保连接牢固,如发现松动情况,请及时进行紧固。
2.定期清洁定位器内部,可以使用吹扫或者清洗的方法,清除内部的杂质,防止影响正常使用。
3.定期检查电源和控制电路的连接,确保连接正常,电路不松动。
4.定期进行性能检测,根据需要调整参数,以保证定位器的精度和可靠性。
5.对于长期不使用的定位器,将电源切断,并在干燥通风的环境中储存,以避免湿气和污染物的腐蚀。
ABB定位器说明书.
ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
ABB定位器(烟气挡板气动执行器)说明书

ABB定位器(烟气挡板气动执行器)说明书调试步骤1.接通定位器气源。
2.接通定位器电源,提供4~20mA输入信号至模拟量输入端子(11,12)。
3.检查安装是否正确。
●按住MODE键。
●同时按下↑键,直到显示“MAN-SENS”,释放MODE键。
●按↑键或↓键使执行器在阀门机械行程内动作,并记录阀位数值。
阀位刻度盘上有指示。
4启动快速自动校验。
对旋转机构:●按住ENTER键,直到显示“ADJ-ROT”,释放ENTER键。
●再次按下ENTER键,直到记数结束,释放ENTER键。
即启动了快速自动校验。
对线性机构:●按住MODE键,直到显示“ADJ-LIN” , 释放MODE键。
●再次按下MODE键,直到记数结束,释放MODE键。
即启动了快速自动校验。
当快速校验程序成功结束后设置的参数会自动保存在EEPROM中,且定位器会自动返回到前一操作方式。
如果自动校验过程失败,则自动校验程序自动中断,并且存储器中有错误代码显示。
按↑键或↓键确认。
5.如有必要:调整误差范围。
此步骤只适用于精密执行机构。
通常跳过此步。
操作方式选择方式1:自适应控制方式●按住MODE键。
●同时按下↑键,直到显示“CTRL-ADP”释放MODE键。
●当阀位显示50%时,定位器工作在自适应控制方式。
方式2 :检修控制方式●按住MODE键。
●同时按下↑键,直到显示“CTRL-FIX”, 释放MODE键。
●当阀位显示50%时,定位器工作在检修控制方式。
方式3:在阀门行程范围内的手动调节●按住MODE键。
●同时按下↑键,直到显示“MANUAL”, 释放MODE键。
●当阀位显示50%时,按↑键或↓键:在阀门行程范围内的手动进行手动操作。
方式4 : 在传感器检测范围内的手动调节●按住MODE键。
●同时按下↑键,直到显示“MAN-SENS” , 释放MODE键。
●当阀位显示-15%时,按↑键或↓键:在传感器检测范围内进行手动操作。
ABB阀门定位器的校验程序

ABB阀门定位器的校验程序
菜单1.0
1.1阀门振荡参数(阻尼系数)
1.2脱开中控,由现场的UP DOWN 让阀门开关
1.3
2.0调校菜单(可调量程,正、反作用)
2.1比
2.2阀门定位器角行程,TDIZ型为60°反馈杆在阀门开关时的角度行程。
2.3阀门的调零。
高低报警由定位器上的2个旋钮调节。
量程调整:正反作用设置:
开始时,液晶显示的是1.0菜单。
同时按UP+DOWN不松手,按reset,松reset,液晶指示会从3到0,此时松开UP+DOWN进入2.0菜单。
这时再同时按UP+DOWN,液晶指示从3到0后,再松开UP+DOWN,可进入量程调校。
定位器自动校验后,须按住reset,待液晶指示从3到0后,松开reset,定位器会储存住此时定位器的量程。
正反作用设置,是在进入2.0菜单后。
如要设正作用,按住UP,待液晶指示从3到0后,松开UP,此时,液晶显示P32,再按住UP,待液晶显示从3到0后,再松开UP。
再按住reset,待液晶指示从3到0后,松开reset,储存所设正作用。
如要设反作用,按住DOWN,待液晶指示从3到0后,松开DOWN,此时,液晶显示P31,再按住DOWN,待液晶显示从3到0后,再松开DOWN。
再按住reset,待液晶指示从3到0后,松开reset,储存所设反作用。
ABB定位器型号说明

ABB定位器性能特点:ABB(TZID-C)智能阀门定位器的引进,为现场执行器的数字化通讯,全厂的一体化管理通过了先进的工具。
TZID/TZID-C突破传统的定位器概念。
采用TEIP11作为核心部件,结合微处理技术,内置通讯功能。
通过安装,适合转动型及直行程阀门的控制,定位精度高,行程范围大直行程:20~150mm,转动型:达125度。
气容≥13.5kg/小时,气耗≤0.03kg/小时,通过自动零点/量程的调整,简化调试。
采用传感器技术进行温度及位置补偿,具有抗振动能力高达10g,10~150Hz;温度范围-40~+85°C的卓越特点。
通过HART或Profibus/FF通讯接口,建立现场与控制室的实时联系,可进行参数调整,状态监控。
自由组态的输出特性,最大程度地改善球阀/碟阀的输出特性,可采用廉价的球阀/碟阀+智能阀门定位器同时达到关断阀与调节阀的特性。
ABB定位器V18345-1010121001 单作用、故障安全、带4~20mA反馈两线制、连接1/2-14NPTV18345-1010221001 单作用、故障闭锁(三断保护)、带4~20mA反馈两线制、连接1/2-14NPTV18345-1011121001 单作用、故障安全、带4~20mA反馈两线制,ib苯安防爆、连接1/2-14NPTV18345-1017121001 单作用、故障安全、带4~20mA反馈两线制、ia苯安防爆、连接1/2-14NPTV18345-1027120001 单作用、故障安全、无反馈,ia苯安防爆、带HART通信、连接1/2-14NPTV18345-1010520001 双作用、故障闭锁(三断保护)、无反馈、连接1/2-14NPTV18345-1010421001 双作用、故障安全、带4~20mA反馈两线制、连接1/2-14NPTV18345-1010521001 双作用、故障闭锁(三断保护)、带4~20mA反馈两线制、连接1/2-14NPTV18345-1027420001 双作用、故障安全、无反馈,ia苯安防爆、带HART通信、连接1/2-14NPT等。
ABB阀门定位器使用手册

ABB阀门定位器使用手册功能分类进入方式操作按键退出方式二级功能分组中文三级功能分组中文可选参数或设定范围中文缺省值设定值备注configuration level 同时按↑+↓ 点击ENTER 等3秒3-0 MODE +↑ PARAMETER "EXIT"选NV-SAVE /CANCEL 按ENTER 等3秒3--0P1._STANDARD 基本参数组P1.0_ACTUATOR 定位器安装方式LINEAR 线性、ROTARY 角行程P1.1_AUTO.ADJ 启动自动整定程序START 开始P1.2_TOL.BAND 设定偏差带0.8%-100%P1.3_DEADBAND 设定死区0.6%-100%P1.4_TEST 试验修改结果INACTIVE 不执行INACTIVEACTIVE 执行P1.5_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存同时按MODE+ENTER 点击↑选所要的参数组P2._SETPOINT 给定信号组P2.0_MIN_RGE 给定信号的最小值4-18.4mAP2.1_MAX_PRG 给定信号的最大值5.6-20mAP2.2_CHARACT 选择调节特性曲线LINEAR 线性LINEAREP 1/25 等百分比1/25 EP 1/50 等百分比1/50 EP 25/1 等百分比25/1 EP 50/1 等百分比50/1 USER DEF 用户定义P2.3_ACTION 设定阀门正反作用方式DIRECT 正作用DIRECTREVERSE 反作用P2.4_SHUT-OFF 设定阀门关度阈值0%_100% OFFP2.5_RAMP∧降低开向速度1-200、OFFP2.6_RAMP∨降低关向速度1-200、OFFP2.7_SHUT_ON 设定阀门开度阈值0%_100% OFFP2.8_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存P3._ACTUATOR 执行器特性组P3.0_MIN_RGE 调节曲线起始开度0%—100%P3.1_MAX_RGE 调节曲线终止开度0%—100%P3.2_ZERO_POS 选择调节特性曲线CTCLOCKW 逆时针CTCLOCKWCLOCKW 顺时针P3.3_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存功能分类进入方式操作按键退出方式二级功能分组中文三级功能分组中文可选参数或设定范围中文缺省值设定值备注configuration level 同时按MODE+ENTER 点击↑选所要的参数组MODE +↑ PARAMETER "EXIT"选NV-SAVE /CANCEL 按ENTER 等3秒3--0P4._MESSAGE 信息组P4.0_TIME_OUT 定位超时1-200、OFFP4.1_POS_SW1 第一位置信号设置点0%—100%P4.2_POS_SW2 第二位置信号设置点0%—100%P4.3_SW1_ACTV 高于或低于第一位置信号时有效FALL_DEL 低切除FALL_DELEXCEED 高切除P4.4_SW2_ACTV 高于或低于第二位置信号时有效EXCEED 高切除EXCEEDFALL_DEL 低切除CANCEL 不保存P5._ALARMS 报警功能组P5.0 LEACKAGE 启动执行器汽缸泄漏报警INACTIVE 未使用INACTIVEACTIVE 使用P5.1 SP_RGE 启动给定信号超限报警INACTIVE 未使用INACTIVEACTIVE 使用P5.2 SENS_RGE 启动零点漂移报警INACTIVE 未使用INACTIVEACTIVE 使用P5.3 CTRLER 启动远方控制切换报警INACTIVE 未使用INACTIVEACTIVE 使用P5.4 TIME_OUT 启动定位超时报警INACTIVE 未使用INACTIVEACTIVE 使用P5.5 STRK_CTR 启动调节行程超限报警INACTIVE 未使用INACTIVEACTIVE 使用P5.6 TRAVEL 启动总行程超限报警INACTIVE 未使用INACTIVEACTIVE 使用P5.7 _EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存P6._MAN_ADJ 手动调整P6.0_MIN_VR 手动设置阀门全关位置65%P6.1_MAX_VR 手动设置阀门全开位置65%P6.2_ACTAUTOR 选择执行器型式LINEAR 线性LINEARROTARY 角行程P6.3_SPRING_Y2 设定执行器弹簧伸长时定位器反馈杆旋转方向CLOCKW 逆时针CLOCKWCTCLOCKW 顺时针功能分类进入方式操作按键退出方式二级功能分组中文三级功能分组中文可选参数或设定范围中文缺省值设定值备注configuration level 同时按MODE+ENTER 点击↑选所要的参数组MODE +↑ PARAMETER "EXIT"选NV-SAVE /CANCEL 按ENTER 等3秒3--0P6._MAN_ADJ 手动调整P6.4_ADJ_MODE 选择自动调整所需检测项目FULL 全部FULLSTROKE 行程CTRL_PAR 控制参数ZERO_POS 零位LOCKED 锁定P6.5_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVE CANCEL 不保存P7._CTR_PAR 控制参数组P7.0_KP∧开方向比例系数调整1.0-400.0 16.5P7.1_KP∨关方向比例系数调整1.0-400.0 10P7.2_TV∧开方向积分时间调整10-800 164 223P7.3_TV∨关方向积分时间调整10-800 370 236P7.4_GOPULSE∧开脉冲宽度0-200P7.5_GOPULSE∨关脉冲宽度0-200P7.6_Y_OFF5∧开偏置0%-100%P7.7_Y_OFF5∨关偏置0%-100%P7.8_SENSITIV 设定灵敏度0.10%P7.9_TOL_BAND 设定偏差带0.80%P7.10_TEST 试验修改结果INACTIVE 不执行INACTIVEP7.11_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVE CANCEL 不保存P8._ANLG_OUT 模拟信号输出P8.0_MIN_RGE 阀位起始点电流4-18.4mA P8.1_MAX_RGE 100%阀位电流值5.6-20mAP8.2_ACTION 阀位正反方向选择DIRECT 正作用DIRECT REVERSE 反作用P8.3_ALARM 报警HIGH_CUR 高电流HIGH_CUR 、LOW_CUR 低电流P8.4_TEST 测试NONE 、。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阀门定位器1.阀门定位器的分类和用途:(1).阀门定位器是调节阀的主要附件,它与气动调节阀配套使用,接受调节器的输出信号,然后输出信号去控制气动调节阀,当调节阀动作后阀杆的位移又通过机械装置反馈到阀门定位器,定位器与调节阀组成一个闭环回路。
阀门定位器按其结构形式和工作原理分成气动阀门定位器、电—气阀门定位器和智能阀门定位器。
阀门定位器能够增大调节阀的输出功率,减少调节信号的传递滞后,加快阀杆的移动速度,能够提高阀门的线性度,克服阀杆的摩擦力并消除不平衡力的影响,从而保证调节阀的正确定位。
﹙1﹚用于高压介质﹙2﹚用于高压差﹙3﹚用于高温或低温﹙4﹚用于介质中含有固体悬浮物、沾性流体、含纤维、易结焦的场合。
﹙5﹚增加执行机构的动作速度﹙6﹚用于调节阀口径较大的场合。
﹙7﹚实现调节阀反向动作﹙8﹚改善调节阀的流量特性﹙9﹚用于分成调节控制﹙10﹚用于智能控制电—气阀门定位器输入信号为4~20mA的直流信号,输出气压信号.它能够起到电气转换器和气动阀门定位器两种作用.它接受调节器来的信号,变成气压信号和调节阀配套使用.智能电—气阀门定位器用途:用于控制气动直行程或角行程的调节阀,实现阀门的准确定位,它接受来自调节器或控制器或控制系统的电流信号,用这个信号改变执行机构气室的压力,使阀门的位置达到给定值.它由微处理器(CPU)、A/D和D/A转换器、压电导向控制的气动阀等部件组成,其优点是:(1)用压电控制阀取代了喷嘴挡板机构,给定值和实际值的比较纯是电信号,不再是力的平衡,大大提高了可靠性,降低了耗气量;(2)采用微控制器,实现了智能化。
通过软件组态,可实现多种功能,如:自动调整零点和行程,大大节约了投运时间;自动修改控制参数,补偿机械摩檫的变化和填料老化所造成的问题,达到最好的控制效果;设定调节阀的正、反作用方向;设定调节阀的流量特性(线性、等百分比或任意特性);提供4~20毫安阀位反馈信号;阀位报警、故障报警功能。
这种阀门定位器适用于有弹簧执行机构的单作用状况,也适用于无弹簧执行机构的双作用状况﹝即双汽缸调节阀﹞,可为防爆结构也可为非防爆结构.工作电源取自4~20毫安的信号电源。
智能阀门定位器的调校下面就这几种定位器的面板操作和375手操器的操作分别说明一、节阀选用此型号)它是安装在气动阀门上的具有丰富功能,可通讯的新一代傻瓜型阀门定位器。
它的核心是微处理器控制CPU,所有程序的处理运算皆在此。
输入信号及位置反馈经过4000步12位,20ms采样的A/D转换后进行处理。
1、TZIDC-200、TZID-C------ABB阀门定位器(本山阀门,CCI调面板操作面板上有4个按钮,分别是“ENTER”、“MODE”、“▲”、“▼”键。
1)一般操作A:按住MODE键,显示 1.0 放开后显示50.0%CTRL—RDP POSITION说明:由主控或信号发生器输入信号,此时阀门处于受控制状态,任何设置完成后都应将切换到这个状态。
B:按住MODE键,显示 1.1 放开后显示50.0%CTRL—FIX POSITION说明:不由主控或信号发生器输入信号控制,此时阀门处于减压阀气信号控制状态,即设置为多少的额定压力,就输出多少压力,阀门处于全开或全关的两个状态。
此操作可以检验阀门定位器的放大器是否堵塞,阀门能否动作等。
C:按住MODE键,显示 1.2 放开后显示50.0%MANULPOSITION说明:在操作量程内的手动控制,按“▲”、“▼”键可以手动控制阀门。
在信号出现故障时可用此步现场控制阀门。
切换到此步时控制室输出无效。
D:按住MODE键,显示 1.3 放开后显示50.0%MANUL-SENSSENS-POS说明:在定位器的量程范围内进行手动控制,按“▲”、“▼”键可以手动控制阀门。
此步用于新的阀门定位器第一次使用时整定阀门的全行程范围,对于阀门自动整定,这一步是非常有必要的。
1)面板操作设置参数用面板操作来设置参数和用手操器设置比较,要繁琐的多,步骤较多。
P1.X 步骤是阀门定位器的自动整定,比较重要,平时用得也较多,其他几步也重要,但是用手操器来操作更方便,所以只重点介绍P1.X步骤,其他只列出怎样进入设置和基本参数。
A:怎样进入操作界面?1.打开气源,减压阀调到铭牌上规定的气源压力。
2.接通4-20MA输入信号(11+、12-)3.一直按住MODE键,用“▲”、“▼”键选择模式“1.3”,放开MODE键,用“▲”、“▼”键将阀门从最小到最大行程跑一遍,对于直行程,角度范围为-28°到+28°,对于角行程,角度范围为-57°到+57°。
4.同时按住“▲”和“▼”键,再按一下“ENTER”键,一直等到数字显示从“3”到“0”,然后放开“▲”和“▼”键,此时进入设置菜单“P1…”5.用“▲”、“▼”键选择“LINEAR”(直行程)或“ROTARY”(角行程),这一步的选择非常重要,以下步骤的参数设定以此步骤为基准。
B:怎样进行自动整定?1.进行完设置后。
2.一直按住ENTER键直到数字从3到0显示完毕,放开ENTER键。
3.此时自动整定开始,这个过程大约要持续20分钟左右,期间在50%处停留时间较长。
注意!对于气开阀,自动整定结果默认为“DIRECT”(正作用)即4-20MA 输入对应输出为0-100%,气关阀为“REVERSE”(反作用)即4-20MA 输入对应输出为100-0%。
对于气关阀为“REVERSE”(反作用)的情况,如果我们要求为4MA对应定位器输出最小,而20MA输出为最大,则在以下的参数设置中应相应的设置为“REVERSE”以达到我们的要求。
具体设置方法见后。
4.自动整定完成后,会显示“COMPLETE”,此时按ENTER键以记住设置。
如果还要再一次继续整定,操作方法同第2步。
5.完成上述步骤后保存设置方法:一直一直按住MODE键,用“▲”键选择模式“P1.4”,放开MODE键,用“▲”、“▼”键选择“NV-SA VE”,一直按住ENTER键直到数字从3到0显示完毕,放开ENTER键,显示自动切换到平时操作界面。
此时设置就保存下来。
注意:上述以及以下步骤的进行必须保持输入信号在4MA以上,一般我们将设置点定在4.0几MA(为什么要这样做是依据经验这样,没深究理论依据)C:怎样进入第2菜单设置步骤,即“P 2…”。
当完成上述“A:怎样进入操作界面?”步骤后,在显示为P1.0(STANDARD)时,同时按住ENTER键和MODE键,用“▲”键选择,直至显示“P2…”(SETPOINT)要进入P3——P11菜单方法与此相同,不再一一列举,下面列出菜单2、用375手操器进行设置用375手操器进行参数的修改方法与面板操作比较起来要简单些,怎样进入手操器操作界面同前面所述一样,与校验变送器不同的地方主要在上述表格中加黑部分的参数设置,现抄录01-FV-0102(角行程,气开阀)的参数进行说明。
A:手操器的接入阀门定位器通入4mA以上的电流,将手操器的正、负极接入阀门定位器的正、负极即可。
B:操作进入设置界面的操作方法同变送器的方法一样,不再一一叙述。
进入后将显示下列内容:1、SERVE\WATCH..........浏览参数数据1)Setpoint 4mA.......................设定点2)Position 100%.......................定位器显示3)Difference 0%.........................回差4)Tolerance Band 2.04%.....................弹簧弹性极限5)Shutoff Value 0.00%...................阀门关闭输出值6)Temperature 16▫C..................当前温度7)Setpoint Rang设定点量程,按DEL键后显示 a:Lower Current Val 4.0...............下限b:Upper Current Val 20.0..............上限8)Operating Mode 操作模式,按DEL键后显示Controlling Mode Adactive..........9)Messages 信息,按DEL键后显示报警等信息,没用此功能,在此省略。
2、Setting 这一步非常重要,主要有用的参数在此设定修改。
键入DEL后显示:1)TZID-C Prarmmeter TZID-C定位器程序,键入DEL后显示:Setpoint 4mA.......................设定点在4mATolerance Band 2.04%.....................弹簧弹性极限Travel Rang min: 0.00%max:98.0%............阀门量程Shutoff Value 0.00%...................阀门关闭输出值Dead band time li 0s........................顶部弹簧响应时间Adjusted Speed 调节响应速度,.按DEL键后显示Adjusted Speed Up 0s............上升速度Adjusted Speed Dn 0s............下降速度Alammask 0.00%....................报警设置,我们没用Charatteristic cu Liner.....................执行机构特性--线性,可选对数等特性Valve cation Reverse................反作用,如果作用方式不对,可选正作用Alarm Limit 报警开关设置,若需要设置限位开关,可在此设置。
因为没用此功能,故略。
Digital input None....................数字信号输入。
此参数的设置页重要,一般我们选择None,若选择move to pos. 0%或100%,一旦通气源,阀门定位器则会自动输出到0%或100%,所以最好选None。
2)Manal 菜单设置,键入DEL后显示:Valve rang阀门量程,按DEL键后显示Min 25.24%Max 76.02%...........即阀门的最小,最大开度Digital Seipoint 数字信号设定点,一般不设置Lever Zero Poistion 定位器零点位置,按DEL键后显示Stop Turn Ctclw(此台阀门选择)......................逆时针方向停止转动Stop Turn Clw ....................顺时针方向停止转动Sping action act 执行机构作用方向,按DEL键后显示Act turn ctclw(此台阀门选择).......................逆时针Act turn clw........................顺时针Actuator 执行机构作用形式,按DEL键后显示ROTARY.................角行程,指转动的执行机构DIIRECT.................直行程Control Prammeters 控制菜单程序,自整定后阀门定位器自动保存3)OPTIONS 选项,键入DEL后显示:Analg Pos Feedback 模拟信号反馈,按DEL键后显示Output min 0.00%.........输出最小值Output max 100.0%........输出最大值Output action Direct............. 输出形式...正作用Alarm Message 报警信息,按DEL键后显示›20mA‹4mA3、DIAGNOSTICS 自诊断,略,保持出厂设置即可4、Simulation 模拟信号,键入DEL后显示:1)Simulation inactive.......无源,一般选择无源active........有源2)Operaling mode 保持出厂设置3)Options installed 与“2.3”相同设置4)Postion Dig Pos Feedback 数字信号反馈,略Simulation inactive.....定位器为无源模拟信号5)Failure Simulation inactive.....5、Information 信息此步骤为定位器型号、位号、时间、HART协议等信息的设置,有必要的话可以设置这些信息,不设置也不影响阀门的正常工作。