基于simulink的线性二自由度汽车模型稳态响应
基于Simulink的车辆动力学仿真模型研究
基于Simulink的车辆动力学仿真模型研究岳三玲;卜继玲;傅茂海【摘要】采用Simulink分别建立了车辆垂向-横向空间动力学模型、垂向动力学模型以及横向动力学模型,并根据三者的动力学性能仿真表现,对比提出了三种动力学模型的适应工况.【期刊名称】《机械制造与自动化》【年(卷),期】2010(039)001【总页数】4页(P127-130)【关键词】Simulink;仿真模型;动力学性能【作者】岳三玲;卜继玲;傅茂海【作者单位】西南交通大学,机械工程学院,四川,成都,610031;西南交通大学,机械工程学院,四川,成都,610031;西南交通大学,机械工程学院,四川,成都,610031【正文语种】中文【中图分类】工业技术· 信息技术·岳三玲,等·基于 Simulink 的车辆动力学仿真模型研究基于Simulink 的车辆动力掌仿真模型研究岳三玲,卜继玲,傅茂海(西南交通大学机械工程学院,四川成都 610031 )摘要:采用 Simulink 分别建立了车辆垂向一横向空间动力学模型、垂向动力学模型以及横向动力学模型,并根据三者的动力学性能仿真表现,对比提出了三种动力学模型的适应工况。
关键词:Simulink ;仿真模型;动力学性能中图分类号: TH113 ; U292.9 : TP391.9文献标志码: B文章编号: 1671-5276(2010)01-0127-04 Research onDynamicSimulationModelsof VehicleSystemBasedonSimulink YUE San-ling,BUJi-ling,FUMao-hai ( SchoolofMechanicalEngineering,SouthwestJiaotongUniversity,Chengdu610031,Chin a) Abstract:Three dynamicmodelsarerespectivelybuiltbySimulink,theyareverticaHateralspacedynamicmodel,verlicaldynamic modelandlateraldynamicmodel.Theadaptiveconditionsof the threemodelsareproposedaccordingto the simulationsof theirdy- namicperformance.Keywords:Simulink;simulationmodel;dynamicperforman ce轨道车辆是一个复杂的动力系统,在线路运行过程中,系统中各组成构件由于各种激扰的作用会产生力和位移的动态变化,这是机车车辆系统动力学的研究内容。
线性二自由度汽车模型
α1 −α2 = KayL
m: vehicle mass
16/81
α1-α 2
K > 0不足转向
α1 −α2 = KayL
K = 0中性转向
ay
K < 0过度转向
a y > 0.3 ~ 0.4 g,α1 − α 2与a y不再为线性关系 α和ωr急剧变化,出现半径迅 速增加或减小的现象。 a y对α1 − α 2关系用斜率表示,斜率 > 0 ⇒ 不足转向
β
+
L1ω r
u
−δ
α2
= υ − L2ω r
u
= β − L2ω r
u
FY1 = k1α1 FY 2 = k2α2
6/81
⎩⎨⎧kL11αk11α+1
k2α2 = m(uωr + υ − L2k2α2 = I zωr
)
FY1 + FY 2 ≈ m(uωr+υ)
L1FY1 − L2FY 2 ≈ I zωr
13/81
ωr δ
⎟⎞ ⎠
K <0
K =0
K >0
ucr uch ua
14/81
W过度转向汽车车速达到临界车速时将失 去稳定性。因为只要一个很小的转角δ, 横摆角速度增益ωr/δ就趋于无穷大。
W因为假设纵向速度为优先值,根据纵向 速度与角速度的关系可知,汽车转向半 径极小。这样,汽车必定发生激转,导 致侧滑或侧翻的发生。
5.3 线性二自由度汽车模型 对前轮角输入的响应
1 线性二自由度汽车模型的运动微分方程
☆忽略转向系的影响,以前轮转角作为输入; ☆只在地面上做平面运动,忽略悬架作用; ☆前进(纵轴)速度不变,只有沿y轴的侧向速度 和绕z轴的横摆运动(ay<0.4g) ; ☆驱动力不大,对侧偏特性无影响; ☆忽略空气阻力; ☆忽略因载荷变化引起左、右轮胎特性的变化; ☆忽略回正力矩的变化。
基于MATLABSimulink的车辆转向稳定性的仿真研究

10.16638/ki.1671-7988.2021.03.010基于MATLAB/Simulink的车辆转向稳定性的仿真研究马园杰,周旭(湖北汽车工业学院机械工程学院,湖北十堰442000)摘要:汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。
基于MA TLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。
对比两轮转向和四轮转向的稳定性。
且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
关键词:二轮转向;四轮转向;横摆角速度;质心侧偏角中图分类号:TP391.9;U463.41 文献标示码:A 文章编号:1671-7988(2021)03-34-03 Simulation Research on Vehicle steering stability based on MATLAB/SimulinkMa Yuanjie, Zhou Xu(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)Abstract:Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MA TLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.Keywords: Two wheel steering; Four wheel steering; Yaw velocity; Side slip angleCLC NO.: TP391.9; U463.41 Document Code: A Article ID: 1671-7988(2021)03-34-03前言随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。
05-3 线性二自由度汽车模型
业 ¾ 输出、输入的幅值比是频率 f 的函数,称幅频特性。 工 ¾ 相位差也是 f 的函数,称为相频特性。
¾ 两者统称为频率特性。
车
汽
北
2010-5-20
共55页
17
第三节 线性二自由度汽车模型对前轮角输入的响应
权
版 ωr + 2ω0ζωr + ω02ωr = B1δ + B0δ
B0δ 0 ω02
= uL 1+ Ku2
δ0
=
ωr δ
⎞ ⎟
δ0
⎠s
工业 即稳态横摆角速度
ωr0
=
ωr δ
⎟⎞ ⎠s
δ
0
车对应的齐次方程为 汽ωr + 2ω0ζωr + ω02ωr = 0
北
2010-5-20
共55页
5
第三节 线性二自由度汽车模型对前轮角输入的响应
权
其通解可由如下特征方程求得
业 式中
工 ζ = h 2ω0m′
汽车 B1
=
b1 m′
ω02
=
c m′
ζ—阻尼比。
B0
=
b0 m′
北
2010-5-20
共55页
3
第三节 线性二自由度汽车模型对前轮角输入的响应
权
前轮角阶跃输入的数学表达式为
版
t < 0,δ = 0 ⎫
转 向
院 t
≥
0,δ
=
δ
0
⎪ ⎬
盘 转 角
学 t > 0,δ = 0 ⎪⎭
ω r = C e−ζω0tsin ω 0 1 − ζ 2 t + Φ
基于MATLAB 的二自由度和四自由度汽车振动模型分析

Science and Technology &Innovation ┃科技与创新2020年第17期·67·文章编号:2095-6835(2020)17-0067-03基于MATLAB 的二自由度和四自由度汽车振动模型分析金琦珺,罗骞*(武汉理工大学汽车工程学院,湖北武汉430070)摘要:以普通乘用车为例,将汽车简化成独立悬架整车二自由度与四自由度动力学模型,根据牛顿第二定律求出系统的运动微分方程,并利用MATLAB 研究了汽车振动的频率响应特性,求解得到该振动系统的固有频率和各主振型,绘制出车身、前后轴振动对前后轮激励的频率响应曲线图。
并着重研究了轮胎阻尼对汽车平顺性的影响。
该研究能够对减轻汽车振动及提高汽车行驶平顺性提供一定有益的参考。
关键词:MATLAB ;二自由度:四自由度;自由振动中图分类号:TH701文献标识码:A DOI :10.15913/ki.kjycx.2020.17.0261引言机械振动对于人类的生产生活来说是一把双刃剑,既可以服务于人类,又对人类的生产活动有重大危害。
机械振动既有有利的一面也有有害的一面。
需对振动进行动态分析,通过研究物体偏离平衡位置的位移、速度、加速度等的动态变化来达到目的。
在物体的平衡点附近出现的物体的来回运动,有线性和非线性两种振动模式。
由于外界对系统的激励或作用,使得机械设备产生噪声及有损于机械结构的动载荷,从而影响设备的工作性能和寿命。
尤其是发生共振情况时,可能使机器设备受到损坏,所以急需对机械振动的相关原理进行研究。
为了合理减小振动对设备的危害,充分利用振动进行机器运作,对机械振动产生的规律进行了探讨和研究。
随着计算机智能系统的快速发展,相关的仿真技术都出现了极大的提升空间,在日常的生产活动中,人们经常用到的相关软件有adams 、abaqus 等。
目前MATLAB 计算机软件在计算机的仿真方面使用更加广泛一些,MATLAB 是一款拥有强大绘图能力的工程计算高级计算机语言。
基于Simulink的车辆两自由度操纵稳定性模型

基于Simulink的车辆两自由度操纵稳定性模型汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1.二自由度汽车模型为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2.运动学分析分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
确定汽车质心的(绝对)加速度在车辆坐标系的分量 和 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度 1与t 时刻在Ox 轴上的分量为u ,在Oy 轴上的分量为v 。
2.1 沿Ox 轴速度分量的变化为:由于汽车转向行驶时伴有平移和转动,在t+△t 时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿x 轴速度分量变化为:()cos ()sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到Δθ很小并忽略二阶微量,上式变成:Δu-v Δθ,除以Δt 并取极限,便是汽车质心绝对加速度在车辆坐标系Ox 和Oy 上的分量为:2.2 二自由度动力学方程因此我们可以得出两自由度的基本操纵模型的运动方程:由于假设侧片刚度在线性区域,所以F y = -K αα(公式2) 在单轨模型中,前轮的侧向速度为v f =v+ar后轮的侧向速度为v r =v-br当α很小的时候,可以认为tan α≈α 所以:() 1 r yf yrz r yf yrm v uw F F I w aF bF +=+⎧⎪⎨=-⎪⎩(公式) 3r r r f u bw u u aw u ααδ-⎧≈⎪⎪⎨+⎪≈-⎪⎩(公式)12121221212112()()()()()r rZ r r k k ak bk m v uw k v w u u ak bk a k b k I w ak v w u u k δδ+-⎧+=--⎪⎪⎨-+⎪=--⎪⎩其中k 为前轮侧偏刚度为后轮侧偏刚度将转向输入δ作为系统的输入放在方程右边,并以状态空间方程的形式来表示,则可得到系统的运动方程为:2.3 转化成标准的状态空间方程转化为标准的状态空间方程为:()121212211212()()00()()z r r k k ak bk mu u um v v k I w w ak ak bk a k b k u u δ+-⎛⎫+ ⎪⎛⎫⎛⎫⎛⎫⎛⎫⎪+= ⎪⎪ ⎪ ⎪⎪-+⎝⎭⎝⎭⎝⎭⎝⎭⎪⎝⎭11;;;r X AX BUv A P Q B P R X U w δ--=+⎛⎫=-=== ⎪⎝⎭其中输入矢量为()121222121211;()()()()010r z z z X AX BUY CX DU v X U w k k ak bk u mu muA ak bk a k b k I u I u k mBCD ak I δ=+=+⎛⎫== ⎪⎝⎭+-⎛⎫-+ ⎪⎪= ⎪-+ ⎪⎝⎭⎛⎫- ⎪⎪=== ⎪- ⎪⎝⎭其中M文件定义的参数值Simulink模型二自由度汽车Simulink模型横摆角速度阶跃响应2.4以状态方程建立的仿真图A=-inv(p)*QB=inv(p)*RC=[0 1];D=[0];得到的仿真结果如上图的阶跃响应结果一样,不再给出。
基于simulink的线性二自由度汽车模型稳态响应
awr bw r FY k 1 k2 u u
z
M
aw r a k1 bk2 u
bw r u
得到二自由度汽车的运动微分方程为
( k1 k 2 ) (1 / u )( ak1 bk 2 )w r k1 m( dv / dt uw r )
(ak1 bk 2 ) (1 / u )(a 2 k1 b 2 k 2 ) wr ak1 I z dw r / dt
式中,m 为整车质量; k1、k2 分别为前、后车轮的侧偏刚度;a、b 分别为前、 后轴到质心的距离; v 为侧向速度; u 为横向速度;质心侧偏角为β; δ为前轮转 角; ωr 为横摆角速度。
2.二自由度车辆模型
如果要准确的对车辆的动力学状态进行描述, 则需要知道车辆的上百个参数, 譬如轮胎半径、前后轮的侧偏刚度等,但这当中有许多的参数是不变的,而有些 却在车辆的行驶过程中会不断地发生变化,我们难以知道所有的参数的精确值, 有些参数甚至于是不可以被测得的。而且,车辆的动力学状态也受到外部的行驶 环境的影响, 譬如汽车和空气的相对运动所产生的空气阻力、地面坡度所产生的 道路的阻力等都会对汽车的状态有明显的影响, 然而这些力的大小方向都会实时 发生变化, 就算根据相关的经验公式也只能得到它们的估计值,不容易被直接地 测出。除此之外,汽车的许多参数相互之间都存在耦合关系,某一个参数的改变 也可能会导致其它的参数改变,譬如汽车横向速度以及纵向速度间的耦合关系、 非线性的轮胎横向力和纵向力间的耦合关系。 有的参数之间的耦合关系并不能够 用准确的数学公式来表达,这会使得所创建的数学模型的精度受到严重的影响。 显而易见, 如果要建立一个能精确地描述汽车的运动状态的车辆数学模型很明显 是不太可能的。 本实验根据实际情况的需要进行适当地简化后把多自由度的整车模型简化 成为二自由度车辆动力学模型。 在分析中,直接以前轮转角作为输入而忽略了转 向系统的影响; 也忽略了悬架的作用,认为汽车的车厢只作平行于地面的平面运 动, 汽车只有沿着 y 轴的侧向运动以及绕着 z 轴的横摆运动。在建立运动微分方 程的时候还假设: 不考虑地面切向力对轮胎侧偏特性的影响,也忽略左右车轮的 轮胎由于载荷变化而引起的轮胎特性的变化以及轮胎回正力矩的作用。如下图 1, 它是一个有前后两个有侧向弹性的轮胎支承于地面、 具有侧向及横摆运动的二自
线性二自由度汽车模型对前轮角输入的响应概要

r
u
,
ar
u
2
y
ar 1 ( ) u br br 2 u u
V
2 u2
L2
1
FY 1 u
L1
u1
x
FY 2
L
由轮胎的侧偏特性,在侧 偏角≤5°,侧偏力与侧偏角 的关系:
FY 1 k11 FY 2 k 2 2
三、几个表征稳态响应的参数
1. 前后侧偏角绝对值之差 如果不知道轮胎侧偏刚度和汽车其他参数,只能通过实 验判断汽车稳态特性。测出前后侧偏角绝对值之差,即可 求出稳定性因数K来。并注意到
may b Fy1L, may a Fy 2 L
m a b 1 m ay a m ay b K 2 ( ) ( ) L k 2 k1 La y Lk 2 Lk1 1 Fy 2 Fy1 1 ( ) ( 2 - 1 ) La y k 2 k1 La y
2. 转向半径比
根据前式有
u (1 Ku 2 ) L R (1 Ku 2 ) R0 u / L r 1 Ku 2 u
R 1 Ku 2 R0
此即车速为u时的转向半径R与初始半径(车速极低时的转向半 径)R0之比。
显然有:
若 R>R0 时,K>0 不足转向 若 R=R0 时,K=0 中性转向 若 R< R0 时,K<0 过多转向
二、前轮角阶跃输入下进入的稳态响应
(一)稳态响应
v 1 (k1 k2 ) (ak1 bk2 )r k1 m ur u u v 1 2 (ak1 bk2 ) (a k1 b2 k2 )r ak1 0 u u
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
向和大小都会发生变化。可以得到沿 Ox 轴的速度分量的变化如下:
u ucos u v vsin u cos u cos u v sin v sin
kg m-2
k1
N/rad
k2
N/rad
数值 1500 1.185 1.283 2280 -60533 -70052
车速
u
m/s
80
k1 -60533
-70052 k2
1.185 a
1.283 b
k1*delta B
k1+K2 a*k1
(k1+k2)*B
(a*k1-b*k2)*w/u+ (k1+k2)*B-k1*delta
FY
FY1 cos
F Y2
M z aFY1 cos bFY 2
上式中,δ 为前轮转角;FY1、FY2 分别为地面对前、后轮的侧偏力。 因为 δ 比较小,上式可简化为
FY k11 k2 2
M z ak11 bk2 2
上式中,α1 、α2 分别为前、后轮的侧偏角。
因为 很小,所有上式可简化为
u v 除以 t 并取极限,可以得到汽车绝对加速度在坐标系的 ox 轴上的分量。同
理可得,汽车绝对加速度在坐标系 Oy 轴上的分量为
ax du / dt vd / dt du / dt vr ay du / dt ur
二自由度的汽车所受的外力沿 Oy 方向的合力以及绕质心的力矩和为
输出量 (横摆角速度 w,侧向速度 v)
把汽车运动微分方程整理成 dv 和 dωr 的表达式,根据等式关系绘制 模型图,注意输入放在左侧,输出放
在右侧。
(2)打开空白的模型窗口,并将 Simulink 的 Simulink Library Browser
打开。
(3)依据理论以及数学模型,在 Simulink Library Browser 中选取所需
转角; ωr 为横摆角速度。
3.动态系统 simulink 模型的建立方法
(1)先将描写该系统的动力学微分方程根据输入和输出变量整理成所需形 式。
输入量 (k1,k2,a,b,d elta,u,m,Iz )
[(k1 k2 ) (1/ u)(ak1 bk2 )r k1 ](1/ m) ur dv / dt [(ak1 bk2 ) (1/ u)(a 2k1 b2k2 )wr ak1 ](1/ I z ) dr / dt
b*b
u*u
subtract2
(a*a*k1+b*b*k2)*w/u
(a*a*k1+b*b*k2)*w/u +(a*k1-b*k2)*B
2280 Iz
a*a*k1+b*b*k2
Divide3
b*b*k2
图 3 线性二自由度汽车模型对前轮角输入的响应
4.实验结果与分析
将参数代入并运行成功以后,示波器所显示的横摆角速度和侧向速度 响应曲线如下图 4 所示。
运动的二自由度汽车模型。
图 1 二自由度汽车摸型
图 2 利用固结于汽车的车辆坐标系分析汽车的运动
假设汽车的质心同车辆坐标系的原点相重合。 对于这样一个固结于汽车的动坐标系来说,汽车的转动惯量、质量分布参 数等都是常数,这使得采用车辆坐标系很方便。只要把车辆的外力和外力矩以 及车辆的绝对速度和绝对角加速度沿着坐标系的轴线进行分解,就可以得到运 动微分方程。 ax、ay 分别是车辆坐标系的纵轴和横轴,在 t 时刻,质心速度在 Oy 轴上的
k2
br u
Mz
ak1
ar u
bk2
br u
得到二自由度汽车的运动微分方程为
(k1 k2 ) (1/ u)(ak1 bk2 )r k1 m(dv / dt ur ) (ak1 bk2 ) (1/ u)(a 2k1 b2k2 )wr ak1 I z dr / dt 式中,m 为整车质量; k1、k2 分别为前、后车轮的侧偏刚度;a、b 分别为前、 后轴到质心的距离; v 为侧向速度; u 为横向速度;质心侧偏角为 β; δ 为前轮
[(a*k1-b*k2)*w/u+ (k1+k2)*B-k1*delta]/m
1500
m
u*w
a*k1-b*k2 b*k2
(a*k1-b*k2)*w/u (a*k1-b*k2)*B
Add1
1
dv
sv
integrator
dw 1
w
s
Integrator1
delta
80 u
a*k1*d
u*u
a*a
a*a*k1
Scope1
图 4 横摆角速度响应曲线
从响应曲线可以看出,当前轮给定一个阶跃信号后,汽车的横摆角速度首 先会迅速增长,然后迅速衰减,之后经过u 为 60m/s,得到响应曲线如图 5 所示。
图 5 横摆角速度响应曲线 2
当汽车沿 x 轴的前进速度由 80m/s 改为 60m/s 时,从响应曲线可以看出, 振荡的幅度有所减小,但都趋于平稳。
要的模块,将它复制到空白的模型窗口当中。本实验中主要用到的模型有:常
量 constant、积分 integrator、乘除 divide、加减 subtract、阶跃信号 step
和示波器显示 scope。
(4)根据理论以及数学模型,将各模块之间进行连线,从而使它成为一个
系统。
(5)对各个模块的参数进行设定。根据表 1 中给定的相关参数设置前、后
v/u
v ar ar
u
u
上式中, 为质心侧偏角; 为 u1 与 x 轴的夹角。
由此可得,前后轮侧偏角为
1
ar u
2
v br u
br u
而外力外力矩和汽车运动参数的关系式如下
FY
k1
awr u
基于 simulink 的线性二自
由度汽车模型稳态响应
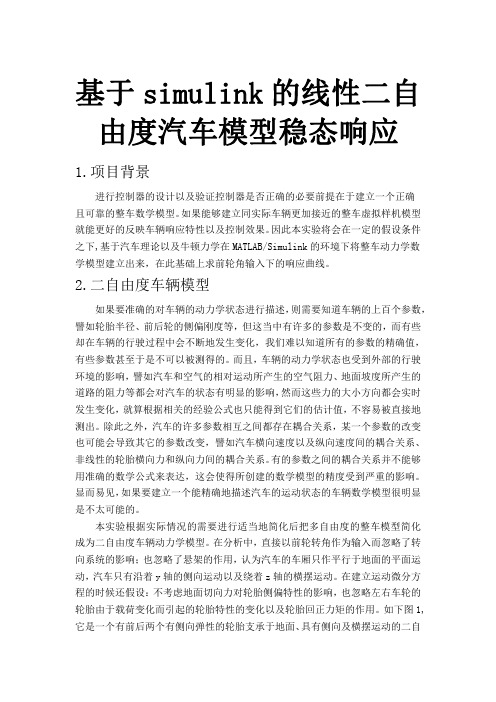
1.项目背景
进行控制器的设计以及验证控制器是否正确的必要前提在于建立一个正确 且可靠的整车数学模型。如果能够建立同实际车辆更加接近的整车虚拟样机模 型就能更好的反映车辆响应特性以及控制效果。因此本实验将会在一定的假设 条件之下,基于汽车理论以及牛顿力学在 MATLAB/Simulink 的环境下将整车动力 学数学模型建立出来,在此基础上求前轮角输入下的响应曲线。
车轮的侧偏刚度、前、后轴至质心距离、车速、整车质量、汽车绕 z 轴转动惯
量 lz 以及仿真时间。输入为前轮转角 δ,δ 为阶跃信号,输出为横摆角速度 ωr。
参数名称 整车质量 质心到前轴距离 质心到后轴距离 绕 z 轴的转动惯量 前轮侧偏刚度 后轮侧偏刚度
表 1 汽车参数列表
符号
量纲
M
kg
a
m
b
m
Iz
2.二自由度车辆模型
如果要准确的对车辆的动力学状态进行描述,则需要知道车辆的上百个参 数,譬如轮胎半径、前后轮的侧偏刚度等,但这当中有许多的参数是不变的, 而有些却在车辆的行驶过程中会不断地发生变化,我们难以知道所有的参数的 精确值,有些参数甚至于是不可以被测得的。而且,车辆的动力学状态也受到 外部的行驶环境的影响,譬如汽车和空气的相对运动所产生的空气阻力、地面 坡度所产生的道路的阻力等都会对汽车的状态有明显的影响,然而这些力的大 小方向都会实时发生变化,就算根据相关的经验公式也只能得到它们的估计值, 不容易被直接地测出。除此之外,汽车的许多参数相互之间都存在耦合关系, 某一个参数的改变也可能会导致其它的参数改变,譬如汽车横向速度以及纵向 速度间的耦合关系、非线性的轮胎横向力和纵向力间的耦合关系。有的参数之 间的耦合关系并不能够用准确的数学公式来表达,这会使得所创建的数学模型 的精度受到严重的影响。显而易见,如果要建立一个能精确地描述汽车的运动 状态的车辆数学模型很明显是不太可能的。
本实验根据实际情况的需要进行适当地简化后把多自由度的整车模型简化 成为二自由度车辆动力学模型。在分析中,直接以前轮转角作为输入而忽略了 转向系统的影响;也忽略了悬架的作用,认为汽车的车厢只作平行于地面的平 面运动,汽车只有沿着 y 轴的侧向运动以及绕着 z 轴的横摆运动。在建立运动 微分方程的时候还假设:不考虑地面切向力对轮胎侧偏特性的影响,也忽略左 右车轮的轮胎由于载荷变化而引起的轮胎特性的变化以及轮胎回正力矩的作用。 如下图 1,它是一个有前后两个有侧向弹性的轮胎支承于地面、具有侧向及横摆