基本蚁群优化算法及其改进
蚁群算法在最优路径选择中的改进及应用

c law enforcement. Therefore, c congestion was ciency of the improved algorithm with the Dijkstra algorithm. Thus, it could simulate the optimal driving path with better performance, which was targeted and innovative.关键词:蚁群算法;实际路况;最优路径Key words :ant colony optimization; actual road conditions; optimal path文/张俊豪蚁群算法在最优路径选择中的改进及应用0 引言在国务院发布的《国家中长期科学和技术发展规划纲要(2006-2020年)》中,将交通拥堵问题列为发展现代综合交通体系亟待解决的“三大热点问题”之一。
智能交通系统作为“互联网+交通”的产物,利用先进的科学技术对车、路、人、物进行统一的管控、调配,成为了当下各国缓解交通拥堵的一个重要途径。
路径寻优是智能交通系统的一个核心研究内容,可以有效的提升交通运输效率,减少事故发生频率,降低对城市空气的污染以及提升交通警察的执法效率等。
最著名的路径规划算法是Dijkstra算法和Floyd算法,Dijkstra算法能够在有向加权网络中计算得到某一节点到其他任何节点的最短路径;Floyd算法也称查点法,该算法和Dijkstra算法相似,主要利用的是动态规划思想,寻找加权图中多源节点的最短路径。
近些年,最优路径的研究主要集中以下几个方面:(1)基于A*算法的路径寻优。
A*算法作为一种重要的路径寻优算法,其在诸多领域内都得到了应用。
随着科技的发展,A*算法主要运用于人工智能领域,特别是游戏行业,在游戏中,A*算法旨在找到一条代价(燃料、时间、距离、装备、金钱等)最小化的路径,A*算法通过启发式函数引导自己,具体的搜索过程由函数值来决定。
基本蚁群优化算法及其改进

5、蚂蚁的初始分布
为了测试蚂蚁的初始分布对AS算法性能的影响,M.Dorigo分别对随机 分布的16城市的TSP问题,4×4网格问题和Oliver30问题进行了测试。分 两种情况,(i)所有蚂蚁初始时刻放在同一个城市;(ii)蚂蚁分布在不同的 城市中。结果发现第(ii)种情况可获得较高的性能。同时也测试了随机分布 与统一分布的性能差异,结果发现其差别不大。
图2.1ant-cycle求解CCA0问题时信息素分布的进化过程 (a)初始时刻信息素迹的分布; (b)算法迭代100次后信息素迹的分布
2、参数α、β对AS算法性能的影响
定义2.1在蚂蚁搜索解的过程中,所有蚂蚁都选择同样的路径,即系统不再 搜索较好的解,称为停滞现象(Stagnation behavior)。 当参数设置为某些值时,算法迭代到一定代数后将出现停滞现象。其原因是 因为较好路径上的信息素远大于其它边上的,从而使所有蚂蚁都选择相同的路径。 定义3.2设τmin(r,s) 、 τmax(r,s) 分别为与节点r相连的边上最大、最小信息 素值,令δ (r) =τmax (r,s )-τmin (r,s) ,对某个给定的λ(0<λ<1),则在所有与 节点r相连的边中,信息素量大于等于λδ(r) +τmin (r,s) 的边的数量称为节点r的 节点分支数(node branching)。其中λ可根据实际需要确定。 定义3.3设θ(r)为节点r(r=1,2,…,n) 的节点分支数,n为节点数,则平均节 点分支数(Average Node Branching,简称ANB)为 。
图2.2是ant-cycle求解Oliver30问题时ANB的进化情况。在某些参数 设置下,当算法迭代2500次后,ANB到达2。就对称TSP问题而言,这意味 着所有的蚂蚁都选择同样的路径,即算法出现停滞现象。
基本蚁群优化算法及其改进共63页文档

谢谢!
基本蚁群优化算法及其改进
1、合法而稳定的权力在使用得当时很 少遇到 抵抗。 ——塞 ·约翰 逊 2、权力会使人渐渐失去温厚善良的美 德。— —伯克
3、最大限度地行使权力总是令人反感 ;权力 不易确 定之处 始终存 在着危 险。— —塞·约翰逊 4、权力会奴化一切。——塔西佗
5、虽士 比
21、要知道对好事的称颂过于夸大,也会招来人们的反感轻蔑和嫉妒。——培根 22、业精于勤,荒于嬉;行成于思,毁于随。——韩愈
23、一切节省,归根到底都归结为时间的节省。——马克思 24、意志命运往往背道而驰,决心到最后会全部推倒。——莎士比亚
蚁群优化算法课件

05
蚁群优化算法的改进与优 化
信息素更新策略的改进
动态更新策略
根据解的质量实时调整信息素浓度,以提高算法的搜 索效率。
自适应更新策略
根据蚂蚁移动过程中信息素挥发的情况,动态调整信 息素更新规则,以保持信息素浓度的平衡。
局部与全局更新结合
在蚂蚁移动过程中,既进行局部更新又进行全局更新 ,以增强算法的全局搜索能力。
该算法利用了蚂蚁之间信息素传递的 机制,通过不断迭代更新,最终找到 最优路径或解决方案。
蚁群优化算法的起源与发展
蚁群优化算法最初起源于对自然界中蚂蚁觅食行为的研究, 发现蚂蚁能够通过信息素传递找到从巢穴到食物源的最短路 径。
随着研究的深入,蚁群优化算法逐渐发展成为一种通用的优 化算法,广泛应用于各种组合优化问题,如旅行商问题、车 辆路径问题等。
任务调度问题
总结词
蚁群优化算法在任务调度问题中能够实现高效的任务调度,提高系统整体性能。
详细描述
任务调度问题是指在一个多任务环境中,根据任务的优先级、资源需求等因素,合理分配任务到不同 的处理单元,以实现系统整体性能的最优。蚁群优化算法通过模拟蚂蚁的行为,利用信息素传递机制 ,能够实现高效的任务调度,提高系统整体性能。
利用已知领域知识
将领域专家的经验或启发式信息融入算法中,以提高算法的搜索 效率和准确性。
利用问题特性
根据问题的特性,引入与问题相关的启发式信息,以引导蚂蚁的移 动方向和选择行为。
自适应调整启发式信息
根据算法的搜索过程和结果,动态调整启发式信息的权重或规则, 以平衡算法的全局搜索和局部搜索能力。
06
蚂蚁行为规则的改进
引入变异行为
01
在蚂蚁移动过程中,随机选择某些蚂蚁进行变异操作,以增强
蚁群优化算法

– 每次循环之后给予最优解以额外的信息素量 – 这样的解被称为全局最优解(global-best solution) – 找出这个解的蚂蚁被称为精英蚂蚁(elitist ants)
16 16
带精英策略的蚂蚁系统
➢信息素根据下式进行更新
其中
ij (t 1) ij (t) ij i*j
实现过程
33 33
实现过程
34 34
实现过程
35 35
中国旅行商问题
ACATSP(C,100,10,1,5,0.1,100) 1.5602e+04
36 36
遗传算法和蚁群算法在 求解TSP问题上的对比分析
37 37
开始
细菌觅食机理
i=i+1
趋向性操作
设细菌种群大小为S,一个细菌所处的位 置表示一个问题的候选解,细菌i的信息 用D维向量表示为
➢较强的鲁棒性 ·➢分布式计算
➢易于与其他方法结合
需要较长的搜索时间 容易出现停滞现
15 15
带精英策略的蚂蚁系统
➢带精英策略的蚂蚁系统(Ant System with elitist strategy,
ASelite)是最早的改进蚂蚁系统。
➢遗传算法中的精英策略
– 传统的遗传算法可能会导致最适应个体的遗传信息丢失 – 精英策略的思想是保留住一代中的最适应个体
ij (t n) ij (t) ij
m
ij
k ij
(2)
k 1
其中,ρ为小于1的常数,表示信息的持久性。
Q
k ij
Lk
ij lk
(3)
0 otherwise
其中,Q为常数;Lk 表示第k只蚂蚁在本次迭代中走过 的路径长度。
第三讲 蚁群优化算法
(2)信息素量大小的取值范围被限制在一个区间内。 (3)信息素初始值为信息素取值区间的上限,并伴随一个
较小的信息素蒸发速率。 (4)每当系统进入停滞状态,问题空间内所有边上的信息
素量都会被重新初始化。
3.3 最大最小蚂蚁系统
(3)蚂蚁根据自己构建的路径长度在它们本轮经过的边上释放信 息素。蚂蚁构建的路径越短、释放的信息素就越多。一条边被蚂 蚁爬过的次数越多、它所获得的信息素也越多。
(4)迭代(2),直至算法终止。
2 算法流程
信息素更新
m
(i, j) (1 r) (i, j) k (i, j),
食物
6:我自己走,说不定能探索 出一条更短的路径呢,
到时候你们就都会跟着我了
蚂蚁在寻找食物的过程中往往是随机选择路径的,但它们能感知当前地面上的信息素浓度, 并倾向于往信息素浓度高的方向行进。信息素由蚂蚁自身释放,是实现蚁群内间接通信的物 质。由于较短路径上蚂蚁的往返时间比较短,单位时间内经过该路径的蚂蚁多,所以信息素 的积累速度比较长路径快。因此,当后续蚂蚁在路口时,就能感知先前蚂蚁留下的信息,并 倾向于选择一条较短的路径前行。这种正反馈机制使得越来越多的蚂蚁在巢穴与食物之间的 最短路径上行进。由于其他路径上的信息素会随着时间蒸发,最终所有的蚂蚁都在最优路径 上行进。
长度越短、信息素浓度越大的路径被蚂蚁选择的概率越大。和是
两个预先设置的参数,用来控制启发式信息与信息素浓度作用的权
重关系。当=0时,算法演变成传统的随机贪心算法,最邻近城市被 选中的概率最大。当=0时,蚂蚁完全只根据信息素浓度确定路径,
算法将快速收敛,这样构建出的最优路径往往与实际目标有着较大 的差异,算法的性能比较糟糕。
蚁群算法的基本原理与改进

蚁群算法最早是为了解决TSP问题(即旅行商问题)。
TSP问题的要求:路径的限制是每个城市只能拜访一次;最后要回到原来出发的城市。求得的路径路程为所有路径之中的最小值。
蚁群算法
各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。
01
02
03
04
概念原型
当一只找到食物以后,它会向环境释放一种挥发性分泌物pheromone (称为信息素,该物质随着时间的推移会逐渐挥发消失,信息素浓度的大小表征路径的远近)来实现的,吸引其他的蚂蚁过来,这样越来越多的蚂蚁会找到食物。
算法改进
下面是一些最常用的变异蚁群算法 1.精英蚂蚁系统 全局最优解决方案在每个迭代以及其他所有的蚂蚁的沉积信息素。 2.最大最小蚂蚁系统( MMAS) 添加的最大和最小的信息素量[ τmax , τmin ],只有全局最佳或迭代最好的巡逻沉积的信息素。所有的边缘都被初始化为τmax并且当接近停滞时重新初始化为τmax。 3.蚁群系统 蚁群系统已被提出。
表示蚂蚁k已经访问过的城市列表。
当所有蚂蚁完成周游后,按以下公式进行信息素更新。
是启发信息,d是城市i和j之间的距离;
02
03
04
05
其中:
蚂蚁算法求解TSP
其中:ρ为小于1的常数,表示信息的持久性。
1
其中:Q为常数;lk表示第k只蚂蚁在本次迭代中走过的路径,Lk为路径长度。
2
蚂蚁算法求解TSP
其原理是一种正反馈机制或称增强型学习系统;它通过信息素的不断更新达到最终收敛于最优路径上;
它是一种通用型随机优化方法;但人工蚂蚁决不是对实际蚂蚁的一种简单模拟,它融进了人类的智能;
它是一种分布式的优化方法;不仅适合目前的串行计算机,而且适合未来的并行计算机;
一种求解多目标优化问题的改进蚁群算法

一种求解多目标优化问题的改进蚁群算法1.简介多目标优化问题在实际应用中普遍存在,例如工程设计、金融投资与风险管理等领域。
而蚁群算法(Ant Colony Optimization,ACO)作为一种基于自组织方法的启发式优化算法,已经在许多领域得到了成功的应用。
然而,原始的ACO 算法仅适用于单目标优化问题,而多目标优化问题则需要改进ACO 算法才能更好地解决。
在本文中,我们将介绍一种改进的ACO 算法,用于求解多目标优化问题。
该算法结合了传统的ACO 算法与一些有效的技术,并优化了算法的选择策略和信息素更新策略,以实现更准确和高效的解。
2.多目标优化问题多目标优化问题(Multi-objective Optimization Problem,MOP)通常包括一个目标函数集合,每个目标函数都需要最小化或最大化。
与单目标优化问题不同的是,MOP 存在多个最优解,而这些最优解不可比较显著。
例如,对于两个最优解x1 和x2,如果x1 的第一个目标函数优于x2,但x2 的第二个目标函数优于x1,则无法判断哪个解更好。
在MOP 中,通常是存在一个Pareto 最优集合P,其中的解都是不可比较的最优解。
在求解过程中,我们希望找到尽可能多的Pareto 最优解。
因此,MOP 的求解算法需要能够实现有效的Pareto 最优搜索,并在保证收敛性和多样性的同时尽可能接近Pareto 最优集合。
3.ACO 算法ACO 算法是群智能中的一种最受欢迎的启发式优化算法,已经在许多领域得到了广泛应用。
在ACO 算法中,许多无序的蚂蚁会在图中随机移动并留下信息素,通过信息素的积累和更新,最终使整个蚁群能够找到最佳路径。
ACO 算法的核心是信息素的积累和更新,以及蚂蚁的选择策略。
在ACO 算法中,每个蚂蚁都有一个当前城市和一些已经遍历过的城市。
蚂蚁在城市之间移动时,将信息素沿其路径释放。
当选择下一个城市时,蚂蚁会考虑信息素和城市间的距离,并采用轮盘赌选择策略选择下一个城市。
蚁群优化算法技术介绍

目录
• 蚁群优化算法概述 • 蚁群优化算法的基本原理 • 蚁群优化算法的实现过程 • 蚁群优化算法的改进与优化 • 蚁群优化算法的案例分析
01 蚁群优化算法概述
定义与原理
定义
蚁群优化算法是一种模拟自然界 中蚂蚁觅食行为的仿生优化算法 。
原理
通过模拟蚂蚁的信息素传递过程 ,利用正反馈机制寻找最优解。
算法特点
分布式计算
蚁群算法中的蚂蚁可以并行地搜索解空间,提高了算法的搜索效 率。
鲁棒性
对初始解和参数选择不敏感,能在多变的搜索空间中寻找到最优 解。
易于实现
算法实现简单,可扩展性强,适用于解决复杂优化问题。
应用领域
路径规划
任务调度
用于解决车辆路径规划、 物流配送等问题。
应用于多核处理器任务 调度、云计算资源分配
蚂蚁的移动规则
随机选择
蚂蚁在移动时,会根据当前位置和目标位置之间的路径上信息素浓度随机选择 下一个移动的节点。
避免重复
为了避免重复访问同一个节点,蚂蚁会根据一定的概率选择新的节点,这个概 率与路径上的信息素浓度成正比。
蚂蚁之间的协作机制
共享信息
蚂蚁通过释放和感知信息素来共享彼此的路径信息和状态,从而在群体中形成一 种协作效应。
网络路由问题求解
总结词
蚁群优化算法在网络路由问题求解中具有较好的应用 效果,能够优化网络路由和提高网络性能。
详细描述
网络路由问题是一个重要的网络通信问题,旨在根据 网络拓扑结构和通信需求,选择最优的路由路径和转 发策略,以实现数据包的可靠传输和网络性能的提升 。蚁群优化算法通过模拟蚂蚁的行为,利用信息素传 递机制来指导搜索过程,能够有效地解决网络路由问 题,优化网络路由和提高网络性能。
基于蚁群聚类算法的优化与改进

一种改进的求解多目标优化问题的蚁群算法
在科学 与工程 实践 中经常会 涉及到对 多个 目标 进 行 同时优 化 , 各 目标 之 间 又 由于受 限于决 策 变 但
略, 防止无 用搜索 , 提高 了算法 的效率 。
量 而常常存 在相 互 冲突 而且 不 可公 度 , 类 问题 被 这 抽 象为多 目标 优化 问题 ( l —O jci pii — Mut beteO t z i v m a
t n MO P 。与单 目标 优化 问题 解 的 明确性 不 同 , i , O ) o 多 目标 问题 对最 优解 的定 义 通 常很 复 杂 , 而且 很 难
客观 的评 价解 的优 劣性 。这种 问题 的最优 解通 常是
一
1 背 景知 识
1 1 多 目标 优化 问题 .
解决含 多 目标 和多 约束 的优 化 问题 称为 多 目标 优 化问题 , 了具体 化考 虑多 目标 优化 问题 , 为 首先给
其 中 , 为 目标 空间 , =( , , , ) ∈X是解 向 y 。 … ‘
量 或称决 策 向量 , 为决 策域 j 。 多 目标 优化 区别 于单 目标 优化 的本质在 于解 的 定 义 。单 目标优 化问题 的一个 解可 能成为 多 目标优 化 问题可接 受 的一 个 “ 不坏 解 ” 单 目标 优 化 问题 中 ,
保持群体 多样性 。此外 ,早 熟 现象 ” “ 和收 敛速 度慢 也是该算 法求解 多 目标 优化 问题时 的一个很 普遍 的
问题 。本 文基 于这些 问题提 出 了一 种改进后 的蚁群 算法来求 解多 目标优 化问 题 , 用 “ 英策 略 ” 利 精 保存
为的决 策 。在 解决一 个多 目标优 化问题 时存在 两个
蚁群算法改进及应用研究
蚁群算法改进及应用研究摘要:蚁群算法是一种启发式优化算法,其物理现象的模拟和仿生方法使其在多个领域得到广泛应用。
本文将介绍蚁群算法的基本原理,并对其改进方法进行探讨。
在应用方面,将重点讨论蚁群算法在路线规划、图像处理、机器学习和网络优化等领域的应用。
通过对蚁群算法的研究和改进,将有助于提高算法的性能和适应性。
1. 引言蚁群算法是一种基于觅食行为的模拟算法,最早由意大利科学家Marco Dorigo等人于1992年提出。
蚁群算法的基本原理来自于觅食过程中蚂蚁的行为,通过模拟蚂蚁的觅食路径选择和信息素沉积行为,实现对问题的优化求解。
2. 蚁群算法的基本原理蚁群算法的基本原理是通过蚂蚁之间的正反馈作用进行信息传递和问题求解。
蚂蚁在觅食过程中会留下一种称为信息素的物质,用于标记路径的好坏。
蚂蚁选择路径时,会倾向于选择信息素浓度高的路径,从而形成一种积累性的正反馈循环。
在这个过程中,较短路径上的信息素浓度会逐渐增加,吸引更多的蚂蚁选择该路径,集中力量探索更优解。
3. 蚁群算法的改进方法为了提高蚁群算法的搜索效率和求解能力,研究者们提出了多种改进方法。
其中,一些方法采用了参数调整和策略改进的方式,如引入启发式信息和适应性参数。
另一些方法则通过改变信息素更新策略和蚂蚁的移动方式来改进算法性能。
例如,引入局部更新策略和全局更新策略,以增加算法的全局搜索能力和局部搜索能力。
4. 蚁群算法在路线规划中的应用蚁群算法在路线规划中具有很好的应用潜力。
通过模拟蚂蚁在寻找食物过程中的路径选择行为,可以有效地解决旅行推销员问题等路线规划问题。
在实际应用中,蚁群算法已经被用于城市交通规划、船舶调度和智能导航系统等领域,取得了良好的效果。
5. 蚁群算法在图像处理中的应用蚁群算法在图像处理中也有不少应用。
例如,通过模拟蚂蚁的觅食路径选择行为,可以实现图像分割、边缘检测和图像增强等任务。
此外,蚁群算法还可以用于图像压缩、图像重建和图像分类等方面。
群体智能优化算法-蚁群优化算法
第五章蚁群优化算法5.1介绍蚁群优化(ACO)是群体智能的一部分,它模仿蚂蚁的合作行为来解决复杂的组合优化问题。
它的概念是由Marco Dorigo[1]和他的同事提出的,当他们观察到这些生物在寻找食物时所采用的相互交流和自我组织的合作方式时,他们感到很惊讶。
他们提出了执行这些策略的想法,为不同领域的复杂优化问题提供了解决方案,并获得了广泛的欢迎[1, 2]。
蚁群算法是一组被称为人工蚂蚁的软件代理,它们为特定的优化问题寻找好的解决方案。
蚁群算法是通过将问题映射成一个加权图来实现的,在加权图中,蚂蚁沿着边缘移动,寻找最佳路径。
蚁群研究(实际上是真正的蚂蚁)始于1959年,当时皮埃尔•保罗•格拉斯(Pierre Paul Grasse)发明了“协同”理论,解释了白蚁的筑巢行为。
之后于1983年Deneubourg和他的同事们[3]对蚂蚁的集体行为进行了研究。
1988年,Mayson和Manderick发表了一篇关于蚂蚁的自组织行为的文章。
最终在1989年,Goss, Aron, Deneubour, and Pasteelson在其研究工作(阿根廷蚂蚁的集体行为)中提出了蚁群算法的基本思想[4],同年,Ebling 及其同事提出了一食物定位模型。
1992年,Marco Dorigo(Dorigo, 1992)在其博士论文中提出了蚂蚁系统(Ant System)[1]。
一些研究人员将这些算法扩展到各个研究领域的应用中,Appleby和英国电信主管发表了第一个在电信网络中的应用,后来Schoonderwoerd 和他的同事在1997年对其进行了改进。
在2002年,它被应用于贝叶斯网络中的调度问题。
蚁群算法的设计是基于蚂蚁搜索巢穴和食物位置之间短路径的能力,这可能会因蚂蚁的种类而有所不同。
近年来,研究人员对蚁群算法的应用结果进行了研究,结果表明,所使用的大多数人工蚂蚁并不能提供最好的解决方案,而精英蚁群通过重复的交换技术提供了最好的解决方案。
《蚁群算法》课件

目
CONTENCT
录
• 蚁群算法简介 • 蚁群算法的基本原理 • 蚁群算法的实现过程 • 蚁群算法的改进策略 • 蚁群算法的性能评价 • 蚁群算法的应用案例
01
蚁群算法简介
蚁群算法的基本概念
蚁群算法是一种模拟自然界中蚂蚁觅食行为的优化 算法,通过模拟蚂蚁的信息素传递机制来寻找最优 解。
02
蚁群算法的基本原理
信息素的挥发与更新
信息素挥发与更新是蚁群算法中一个重要的过程,它影响着蚂蚁 的移动和信息传递。
在蚁群算法中,信息素是蚂蚁之间传递的一种化学物质,用于标 识路径的优劣。信息素会随着时间的推移而挥发,同时蚂蚁在移 动过程中会释放新的信息素。挥发和更新的过程是动态的,影响 着蚂蚁对路径的选择。
要点一
总结词
信息素更新规则是蚁群算法中的重要环节,通过改进信息 素更新规则,可以提高算法的性能。
要点二
详细描述
在蚁群算法中,信息素更新规则决定了蚂蚁在移动过程中 如何更新信息素。改进信息素更新规则可以提高算法的全 局搜索能力和局部搜索能力。例如,可以采用动态调整策 略,根据蚂蚁的移动路径和状态动态调整信息素的更新量 ,或者采用自适应策略,根据问题的特性和求解结果自适 应地调整信息素更新规则,以提高算法的性能。
详细描述
在蚁群算法中,信息素挥发速度决定了信息素消散的快慢。较慢的挥发速度可以使信息素积累,有利于增强算法 的全局搜索能力;较快的挥发速度则有利于算法的局部搜索。通过调整信息素的挥发速度,可以在全局搜索和局 部搜索之间取得平衡,提高算法的效率和稳定性。
蚂蚁数量与移动规则的调整
总结词
蚂蚁数量和移动规则是蚁群算法中的重要参数,通过调整这些参数,可以改善算法的性 能。
毕业论文 蚁群算法
毕业论文蚁群算法蚁群算法(Ant Colony Optimization,ACO)是一种模拟蚂蚁寻找食物的行为而发展而来的一种计算智能算法。
该方法利用蚂蚁在寻找食物过程中留下的信息素来指导其他蚂蚁选择路径,从而达到最优路径的目的。
本文将介绍蚁群算法的基本原理、应用领域以及算法的优缺点。
一、算法原理1.1信息素在蚁群算法中,信息素是指蚂蚁在寻找食物时分泌的一种化学物质,它会留在路径上,用于指导其他蚂蚁选择路径。
当一条路径上的信息素浓度足够高时,其他蚂蚁会更倾向于选择这条路径。
1.2蚁群算法过程(1)初始化:随机放置一些蚂蚁并随机设置它们的起点和终点。
(2)蚂蚁选择路径:每个蚂蚁根据当前位置的信息素浓度,选择下一步要走的路径。
选择路径的规则可以根据具体问题来设计。
(3)信息素更新:当蚂蚁完成任务后,会在其经过的路径上留下一定量的信息素。
信息素的更新可以通过公式:$ T_{ij}=(1-ρ) ·T_{ij}+∑\\frac{\\Delta T_{ij}^{k}}{L_{k}} $ 来完成,其中 $ T_{ij} $ 表示在第 $i$ 个节点到第 $j$ 个节点之间路径的信息素,$ L_{k} $ 表示第 $k$ 只蚂蚁走过的路径长度,$ \\Delta T_{ij}^{k} $ 表示第 $k$ 只蚂蚁在第 $i$ 个节点到第$j$ 个节点之间路径上留下的信息素。
(4)重复执行步骤(2)和(3),直到满足算法终止条件。
二、应用领域由于蚁群算法具有寻优能力和适应性强等优点,因此在多个应用领域得到了广泛的应用:2.1路线规划将蚁群算法应用到路线规划中,可以帮助人们更快捷、更准确地规划出最优路径。
例如,在地图搜索、货车路径规划、船只导航等领域都有广泛的应用。
2.2优化问题蚁群算法能够在多种优化问题中得到应用,例如在图像处理、模式识别、网络优化中,通过不断地调节参数,可以找出最佳的结果。
2.3组合优化问题在组合优化问题中,由于问题的规模较大,常规优化算法很容易陷入局部最优解中无法跳出。
改进蚁群算法及在路径规划问题的应用研究

改进蚁群算法及在路径规划问题的应用研究摘要:蚁群算法(Ant Colony Algorithm,ACA)是一种模拟蚂蚁觅食行为的集成优化算法,在优化问题和路径规划问题中得到广泛应用。
本文结合实例介绍了蚁群算法的基本原理及其优化过程,分析了蚁群算法的优势和不足,提出了一种改进方案,并以路径规划问题为例验证了该算法的有效性。
关键词:蚁群算法,路径规划,优化算法,改进一、绪论随着社会经济的快速发展,人们对于生产、物流、交通等方面的需求也在日益增加。
这时,如何快速准确地规划路径,对于提高效率、降低成本至关重要。
为了解决这一问题,学者们提出了相关的算法,蚁群算法就是其中之一。
蚁群算法是模拟蚂蚁觅食过程的群集智能算法,也是一种通过合理利用信息素实现自组织求解的集成优化算法。
在本文中,我们将对蚁群算法的基本原理及其运行流程进行介绍,并提出一种改进方案来优化其缺点,在路径规划问题中进行验证。
二、蚁群算法的基本原理1. 蚂蚁觅食行为的简介在物质缺乏时,蚂蚁集群会通过一定的方式来搜索食物。
在这个搜索过程中,随着蚂蚁的数量的增加,他们寻找到的食物也越来越多。
蚂蚁采食的过程中会留下信息素,信息素则会引导其他蚂蚁。
在蚂蚁的觅食过程中,信息素起着非常重要的作用。
2. 蚁群算法的基本原理蚁群算法是模拟蚂蚁觅食过程的过程,并以此为基础进行路径规划和优化问题的求解。
蚁群算法采用的是一种集群整体协作的方法,从而解决诸如最短路径、TSP(旅行商问题)等问题。
蚂蚁在搜索食物的过程中,留下信息素,信息素引导了其他蚂蚁,之后其他蚂蚁又留下信息素,这样不断的迭代过程,最终形成了一条路径。
而蚂蚁在往返路径的过程中,会不断地更新信息素,以此来引导其他的蚂蚁。
同时,这些信息素本身也会因为时间的推移和信息素的挥发而逐渐减少,仿真出了生物群体的行为特征。
3. 蚁群算法的优化过程蚁群算法的优化过程可以用以下五个步骤来描述:(1)初始化:初始化一些参数,如信息素、数量、距离等等。
蚁群优化算法
一、蚁群算法的背景信息蚁群优化算法(ACO)是一种模拟蚂蚁觅食行为的模拟优化算法,它是由意大利学者Dorigo M等人于1991年首先提出,之后,又系统研究了蚁群算法的基本原理和数学模型,并结合TSP优化问题与遗传算法、禁忌搜索算法、模拟退火算法、爬山法等进行了仿真实验比较,为蚁群算法的发展奠定了基础,并引起了全世界学者的关注与研究蚁群算法是一种基于种群的启发式仿生进化系统。
蚁群算法最早成功应用于解决著名的旅行商问题(TSP),该算法采用了分布式正反馈并行计算机制,易于与其他方法结合,而且具有较强的鲁棒性。
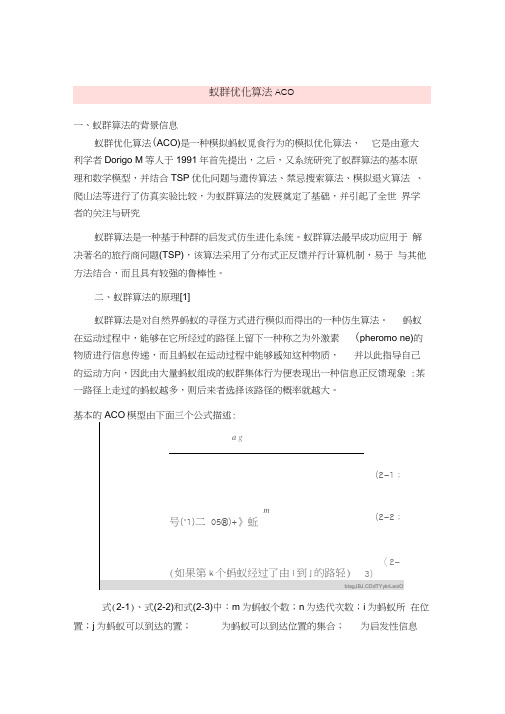
二、蚁群算法的原理[1]蚁群算法是对自然界蚂蚁的寻径方式进行模似而得出的一种仿生算法。
蚂蚁在运动过程中,能够在它所经过的路径上留下一种称之为外激素(pheromo ne)的物质进行信息传递,而且蚂蚁在运动过程中能够感知这种物质,并以此指导自己的运动方向,因此由大量蚂蚁组成的蚁群集体行为便表现出一种信息正反馈现象 :某一路径上走过的蚂蚁越多,则后来者选择该路径的概率就越大。
基本的ACO模型由下面三个公式描述:a g(2-1;m号("1)二05®)+》蚯(2-2;(如果第k个蚂蚁经过了由i到j的路轻)〈2-3)btagJBJ.CDdTYykrLaoiO 式(2-1)、式(2-2)和式(2-3)中:m为蚂蚁个数;n为迭代次数;i为蚂蚁所在位置;j为蚂蚁可以到达的置;为蚂蚁可以到达位置的集合;为启发性信息(3-8>(3-9>Dlog. iirykii_2O1CJ式(3-9)中根据进行信息素更新的蚂蚁的类别可以是已知的最优解的路径长度或者是本次循环中的最优解的路径长度。
(2)信息素浓度的限制。
为了防止某条路径上的信息素出现大或者过小的极端情况,设定信息素浓度区间为。
通过这种方式使得在某条路径上的信息素浓度增大到超过区间上限或者减小到低于区间下限时,算法采用强制手段对其进行调整,以此提高算法的有效性。
蚁群优化算法的理论、改进及应用
蚂 蚁 是一 种 社 会 性 昆 虫 , 过 一 种 特 有 的 通 信 机 制 , 通 其
题 的 一 类仿 生算 法
A t ytm 算 e s 用
人工 蚂蚁这一群简 单智能体 . 助所求解问题原始 的一种 近 借
似算 法 来 模 拟 真 实 蚂 蚁 的 食 物 搜 索 行 为 . 而得 到 所 求 削题 从 的一 种 更 精 确 的 算 法 人 工 蚂 蚁 住 搜 索 过 程 中 , 们 收 集 当 它 前环 境 的局 部 信 息 ( 于 问 题 特 点 的 描 述 和 蚁 群 的 学 习 经 关
Ab ta t An l n tmia in Alo ih ( src : tCoo y Op i z t g rt m ACO ) i o e id o i ua e v l t n r o s a n v lk n fsm l td e o u i a y o
o t z to l o ih ,wh c r v d s a n w t o o o l a e o p i a i n a g rt m mi i h p o i e e me h d f rc mp i t d c mb n t ra p i z t n c iao il t o mia i o
宋雪梅 ,李 兵
(. 1河北理工大学 计算机与 自动控 制学 院, 河北 唐 山 0 3 0 I. 60 9 2 唐山学院 , 河北 唐山 0 3 0 ) 6 00
摘要: 蚁群 优 化算法 是 一种 新 型的模拟进 化优 化算 法, 求解复 杂 的组 合优 化 问题 提供 了一种新 的 为
蚁群算法的基本原理与改进
蚁群算法的基本原理与改进蚁群算法是一种模拟蚂蚁群体行为的启发式算法,通过模拟蚂蚁在寻找食物和归巢过程中的行为,来解决优化问题。
蚂蚁在移动的过程中,通过信息素的释放和感知,实现了全局信息传递和局部信息更新。
蚁群算法基于这种行为特性,通过模拟蚂蚁在解空间中的过程,找到问题的最优解。
1.初始化一群蚂蚁在问题的解空间中随机选择一个起点。
2.每只蚂蚁根据问题的特性和上一次的行走经验,利用概率选择下一步要行走的方向。
3.每只蚂蚁根据选择的方向进行移动,并释放一定量的信息素到路径上。
4.蚁群中的每只蚂蚁根据选择的方向和移动的结果,更新自己的经验和信息素矩阵。
5.重复步骤2-4,直到达到停止条件。
1.路径选择策略的改进:蚂蚁选择下一步行走方向的概率通常根据路径上的信息素浓度和启发式信息来计算,可以根据具体问题的特性,采用不同的路径选择策略,如轮盘赌选择、最大值选择等,来提升算法的能力。
2.信息素更新策略的改进:信息素释放和更新对算法的性能起到重要影响。
可以通过引入一定的衰减因子,控制信息素的挥发速率,降低过快的信息素挥发过程;同时,可以通过引入信息素增强/衰减机制,根据蚂蚁经验和当前信息素浓度调整信息素的更新速率,以提升算法的收敛速度和稳定性。
3.多种启发式信息的融合:在算法中,蚂蚁根据启发信息来选择下一步行走方向。
可以采用多种启发式信息,并将它们进行适当的融合,以增加算法对问题的能力。
4.并行计算和局部:蚁群算法由于全局信息传递的特性,容易陷入局部最优解。
可以通过引入并行计算和局部机制,增加算法的广度和多样性,提升算法的全局能力。
5.参数的自适应调节:蚁群算法中存在一些参数,如信息素释放量、信息素衰减因子等,合理的参数设置对算法的性能至关重要。
可以考虑通过自适应调节参数的方法,如基于概率或规则的自适应机制,自适应地调节参数值,以提高算法的效果。
总而言之,蚁群算法通过模拟蚂蚁的行为特性,实现了全局信息传递和局部信息更新,并通过适当的改进措施,提升了算法的能力和收敛速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图2.1ant-cycle求解CCA0问题时信息素分布的进化过程 (a)初始时刻信息素迹的分布; (b)算法迭代100次后信息素迹的分布
2、参数α、β对AS算法性能的影响
定义2.1在蚂蚁搜索解的过程中,所有蚂蚁都选择同样的路径,即系统不再 搜索较好的解,称为停滞现象(Stagnation behavior)。 当参数设置为某些值时,算法迭代到一定代数后将出现停滞现象。其原因是 因为较好路径上的信息素远大于其它边上的,从而使所有蚂蚁都选择相同的路径。 定义3.2设τmin(r,s) 、 τmax(r,s) 分别为与节点r相连的边上最大、最小信息 素值,令δ (r) =τmax (r,s )-τmin (r,s) ,对某个给定的λ(0<λ<1),则在所有与 节点r相连的边中,信息素量大于等于λδ(r) +τmin (r,s) 的边的数量称为节点r的 节点分支数(node branching)。其中λ可根据实际需要确定。 定义3.3设θ(r)为节点r(r=1,2,…,n) 的节点分支数,n为节点数,则平均节 点分支数(Average Node Branching,简称ANB)为 。
5、蚂蚁的初始分布
为了测试蚂蚁的初始分布对AS算法性能的影响,M.Dorigo分别对随机 分布的16城市的TSP问题,4×4网格问题和Oliver30问题进行了测试。分 两种情况,(i)所有蚂蚁初始时刻放在同一个城市;(ii)蚂蚁分布在不同的 城市中。结果发现第(ii)种情况可获得较高的性能。同时也测试了随机分布 与统一分布的性能差异,结果发现其差别不大。
Table2.1 模型ant-density,ant-quantity,ant-cycle的比较
从表2.1可以看出,ant-cycle模型的性能要优于ant-density和antquantity模型。原因是在ant-cycle模型中用到了全局信息,即蚂蚁释放 在路径上的信息素量与其所得解的质量成正比。周游长度越短的蚂蚁,释放 在其经过的路径上的信息素量就越多,而ant-density、ant-quantity模 型在搜索解时,只使用了局部信息,没有用到任何解的信息。 在ant-cycle算法中,ρ=0.5可以解释为:在计算的初期,使用启发式 贪婪搜索策略;后期,主要使用路径上的信息素τij来进行搜索,同时,antcycle能够忘记部分过去的经历,以便更好的利用新的全局信息来搜索较好 的解。 下面主要就ant-cycle模型来研究AS的特性。
二、基本蚁群优化算法-蚂蚁系统
2.1旅行商问题
2.2 蚂蚁系统
2.2.1算法描述
蚂蚁根据某一概率函数选择下一座城市,其中概率函数是城市间距 离及连接边上信息素量的函数(设τij (t)为t时刻连接边e(i,j)上的信息素 量);每只人工蚂蚁只能走合法路线,除非一次周游(蚂蚁走完所有的 城市称为一次周游)结束,不允许转到已访问的城市。该过程由蚂蚁的 禁忌表来制。设tabuk为蚂蚁k的禁忌表,则蚂蚁k在经过城市i以后,就 将该城市加入到自己的禁忌表tabuk中,表示下一次不能再选择城市i。 用tabuk(s)示禁忌表中第s个元素,也即蚂蚁所走过的第s个城市;完成 一次周游后,蚂蚁在其访问过的每一条边上留下相应的信息素。
以上的实验结果可以解释如下:当α取较大的值时,意味着在 选择路径时,路径上的信息素非常重要;当α取较小的值时,则 ant-cycle变成随机的贪婪算法。
3、蚂蚁数m对AS算法的影响
为了测试蚂蚁数m对ant-cycle模型性能的影响,用该模型来求解图2.4 所示的4×4方格问题。众所周知,当方格的边长为10时,其最优解为160。 在该实验中,分别取蚂蚁数为m∈{4,8,16,32,64}。
AS算法可以表述如下:在算法的初始时刻,将m只蚂蚁随机地放 到n座城市,同时,将每只蚂蚁的禁忌表的第一个元素设置为它当前 所在的城市。此时各路径上的信息素量相等,设τij (0)= C (C为一 较小的常数)。接下来,每只蚂蚁根据路径上残留的信息素量和启发 式信息(两城市间的距离)独立地选择下一座城市。在时刻t,蚂蚁k 从城市i转移到城市j的概率pijk(t)为:
M.Dorigo提出了3种AS算法的模型,算法2.1称为ant-cycle;另外两个 模型分别称为ant-quantity和ant-density,其差别主要在(2.4)式,即: 在ant-quantity模型中为: 公式2.5
在ant-density模型中为: 公式2.6 AS算法实际上是正反馈原理和启发式算法相结合的一种算法。在选择路径时,蚂 蚁不仅利用了路径上的信息素,而且用到了城市间距离的倒数作为启发式因子。实 验结果表明,ant-cycle模型比ant-quantity和ant-density模型有更好的性能。 这是因为ant-cycle模型利用全局信息更新路径上的信息素量,而ant-quantity 和ant-density模型使用局部信息。AS算法的时间复杂度为Ο(NC*n3),其中NC 表示迭代的次数,n为城市数。
2.2.4蚂蚁系统的参数设置和基本属性
目前,对AS算法的参数设置和属性的研究大多还处于实验阶段。 M.Dorigo等人通过大量的实验对蚂蚁系统的参数和基本属性进行了探讨。 讨论的参数包括: α——信息素的相对重要程度; β——启发式因子的相对重要程度; ρ——信息素蒸发系数((1-ρ)表示信息素的持久性系数); Q——蚂蚁释放的信息素量。 在实验中,为了观察某个参数对算法性能的影响,在测试该参数时,其 它参数取缺省值。各参数的缺省值为α=1,β=1,ρ=0.5,Q=100。为比较三种 模型的性能,M.Dorigo首先通过实验方法确定每种模型的最优参数集,然 后各模型在取最优参数集的情况下,分别求解Oliver30问题十次,其结 果如表2.1所示.
公式2.1
其中, Jk(i) = {1, 2,…,n}-tabuk表示蚂蚁k下一步允许选择的城市集 合。列表tabu记录了蚂蚁k当前走过的城市。当所有n座城市都加入到 tabuk中时,蚂蚁k便完成了一次周游,此时蚂蚁k所走过的路径便是TSP 问题的一个可行解。(2.1)式中的ηij是一个启发式因子,表示蚂蚁从城市i转 移到城市j的期望程度。在AS算法中,ηij通常取城市i与城市j之间距离的倒 数。α和β分别表示信息素和启发式因子的相对重要程度。当所有蚂蚁完成 一次周游后,各路径上的信息素根据(2.2)式更新。
图2.2是ant-cycle求解Oliver30问题时ANB的进化情况。在某些参数 设置下,当算法迭代2500次后,ANB到达2。就对称TSP问题而言,这意味 着所有的蚂蚁都选择同样的路径,即算法出现停滞现象。
图2.2在α=5,β=2时平均节点分支数进化到2,出现停滞现象
图2.3 ant-cycle模型中不同的参数(α、β)组合对算法的影响 ●-算法能发现已知的最好解,且不出现停滞现象; ∞-算法不能发现最好解,且不出现停滞现象; Φ-算法不能发现最好解,且出现停滞现象。
2.2.2算法流程(伪码)
1.初始化 置t:=0;{t为计时器} 置NC:=0;{NC为迭代计数器} 对每条边e(i,j)设置τij (t)=C, △τij (t)=0; 将m只蚂蚁放到n座城市上。 2.置s:=1;{s为禁忌表的索引} for k:=1 to m do 将蚂蚁k的起点城市加入其禁忌表tabuk end for 3.repeat until禁忌表tabu k已满 设置s:=s+1; for k:=1 to m do 按(2.1)式计算转移概率pijk(t),根据赌轮方式选择下一个要到的城市j {在时刻t,蚂蚁k在城市i= tabuk(s-1)} 蚂蚁k移到城市j 将城市j加入tabuk(s) end for end repeat 4.for k:=1 to m do 蚂蚁k从tabuk (n)移到tabuk (1); 计算蚂蚁k走过的周游长度Lk; 更新当前的最优路径。 end for
for每条边e(i,j) for k:=1 to m do 公式2.4
end for end for 5.for每条边e(i,j),按(2.2)式计算τij (t+n); 置t:=t+n; 置NC:=NC+1; for每条边e(i,j),置△τij:=0 6.if(NC<NCMAX)and(没有出现停滞情况)then 清空所有禁忌表; goto step 2 else 打印最优路径; 算法停止。 end if
基本蚁群优化算法及其改进
一、引言
• 蚁群在觅食过程中总能找到蚁巢和食物源之间的最短路径。 受其启发,意大利学者M.Dorigo,V.Maniezzo,和 A.Colorni于1991提出了一种新型的模拟进化算法——蚂蚁系 统(Ant System,简称AS)。AS算法是第一个ACO算法,被 称为基本ACO算法,该算法的出现,开创了ACO研究的先河。 AS算法首先用来求解TSP问题,并获得了极大的成功。实验结 果显示AS算法具有极强的发现较好解的能力,但同时也存在一 些缺陷如收敛速度慢、易出现停滞现象等。针对AS算法的不足, 许多学者对其进行了深入的研究,提出了一些改进的ACO算法 如最优保留蚂蚁系统(Ant System with Elitist,简称 ASelite) 、蚁群系统(Ant Colony System,简称ACS)、 最大-最小蚂蚁系统(MAX-MIN Ant System,简称MMAS)、 基于排序的蚂蚁系统(Rank-based Version of Ant System,简称ASrank)等等。下面首先介绍了AS算法的模型、 实现及相关属性,然后讨论了几种改进的ACO算法,最后详细 介绍了我自已提出的两种改进的ACO算法及其实验结果。
图2.4 4×4方格问题的一个可选解
图2.5为实验所得的结果,其中横轴表示蚂蚁数,纵轴表示发现最优 解所用的迭代次数。从图中可以看出当M≈N时,ant-cycle可以在最少 的迭代次数内找到最优解。在对随机分布的16城市的实验中也能得到同 样的结果。
图2.5 在求解4×4网格问题时,每只蚂蚁找到最优解的周 游数与蚂蚁总数ห้องสมุดไป่ตู้间的关系,5次运行的平均结果。