Renault - 自动驾驶功能安全规划
自动驾驶汽车如何确保行人和车辆安全
自动驾驶汽车如何确保行人和车辆安全随着科技的飞速发展,自动驾驶汽车逐渐从科幻电影走向现实生活。
然而,在人们享受自动驾驶带来的便利和舒适的同时,安全问题始终是大家最为关注的焦点。
那么,自动驾驶汽车究竟是如何确保行人和车辆的安全呢?首先,先进的传感器技术是保障安全的重要基石。
自动驾驶汽车通常配备了多种类型的传感器,如激光雷达、摄像头、毫米波雷达等。
激光雷达能够通过发射激光束并测量反射回来的时间,精确地获取周围环境的三维信息,包括物体的距离、形状和速度。
摄像头则类似于人类的眼睛,可以捕捉到丰富的图像信息,识别交通标志、信号灯和行人的姿态。
毫米波雷达则在恶劣天气条件下表现出色,能够穿透雨、雾、雪等,准确探测到前方的障碍物。
这些传感器相互协作,为自动驾驶汽车提供了全方位、高精度的感知能力,使其能够及时发现潜在的危险。
其次,强大的数据分析和处理能力是确保安全的关键。
传感器收集到的海量数据需要在极短的时间内进行分析和处理,以便做出正确的决策。
自动驾驶汽车依靠高性能的计算平台和复杂的算法,对数据进行快速整合和解读。
通过识别不同的物体、预测它们的运动轨迹,并评估潜在的碰撞风险,车辆能够提前规划行驶路径,采取相应的制动、加速或转向操作。
例如,当检测到前方行人突然横穿马路时,车辆能够迅速计算出安全的避让策略,避免事故的发生。
再者,完善的通信系统也是保障安全的重要环节。
车与车(V2V)以及车与基础设施(V2I)之间的通信技术,能够让自动驾驶汽车更好地了解周围的交通状况。
V2V 通信可以使车辆之间相互分享行驶速度、方向和位置等信息,从而避免追尾和侧面碰撞等事故。
V2I 通信则能够让车辆获取交通信号灯的状态、道路施工信息等,提前做好准备。
例如,当自动驾驶汽车接近一个即将变红的信号灯时,它可以根据通信接收到的信息提前减速,而不是在信号灯前急刹车,减少后车追尾的风险。
另外,严格的安全测试和验证也是必不可少的。
在自动驾驶汽车投入市场之前,需要经过大量的实际道路测试和模拟场景测试。
智能驾驶决策规划与控制阅读随笔

《智能驾驶决策规划与控制》阅读随笔目录一、智能驾驶综述 (2)1. 智能驾驶定义与分类 (3)2. 智能驾驶发展历程 (4)3. 智能驾驶应用场景 (5)二、智能驾驶决策规划 (7)1. 决策规划基本概念 (8)2. 决策规划流程 (10)3. 决策算法与应用 (11)4. 决策规划的挑战与未来发展趋势 (13)三、智能驾驶控制 (14)1. 控制系统基本原理 (15)2. 控制系统设计方法 (17)3. 控制系统性能评估 (18)4. 控制系统的实际应用与挑战 (19)四、智能驾驶中的感知与交互 (20)1. 感知技术发展与应用 (21)2. 人机交互技术与实现 (22)3. 跨模态感知与交互 (23)4. 感知与交互的挑战与未来趋势 (24)五、智能驾驶的安全与法规 (26)1. 安全性问题与挑战 (27)2. 法规政策环境分析 (28)3. 安全与法规的协同发展 (29)4. 国际合作与标准制定 (31)六、智能驾驶的未来展望 (32)1. 技术创新与发展趋势 (33)2. 商业模式与市场前景 (34)3. 社会影响与伦理讨论 (36)4. 未来出行方式变革与挑战 (38)一、智能驾驶综述随着科技的飞速发展,智能驾驶已经从科幻电影中的概念逐渐走进现实生活。
即自动驾驶汽车,是指通过计算机系统对汽车进行控制,实现无人驾驶的技术。
它利用传感器、摄像头、雷达等设备获取周围环境信息,并通过先进的算法进行处理,实现对汽车的自动驾驶。
智能驾驶技术的发展可以分为几个阶段,初级阶段主要是辅助驾驶技术,如自动泊车、自适应巡航等。
中级阶段则是部分自动驾驶技术,如车道保持辅助、自动变道等。
而高级阶段则是完全自动驾驶技术,汽车可以在无需人工干预的情况下独立行驶。
智能驾驶技术的出现,无疑将极大地改善道路交通安全和效率。
全球每年约有130万人死于交通事故,其中大部分是由人为因素造成的。
智能驾驶技术可以通过精确的感知和判断,避免许多由人为失误引发的事故。
人工智能无人驾驶汽车安全操作手册

人工智能无人驾驶汽车安全操作手册第一章:概述 (3)1.1 无人驾驶汽车的定义与分类 (3)1.2 无人驾驶汽车的安全性与可靠性 (3)第二章:技术原理 (4)2.1 感知系统 (4)2.2 决策系统 (4)2.3 控制系统 (4)2.4 通信系统 (5)第三章:安全操作规范 (5)3.1 启动与关闭操作 (5)3.1.1 启动操作 (5)3.1.2 关闭操作 (5)3.2 车辆行驶前的检查 (5)3.2.1 车辆外观检查 (5)3.2.2 车辆功能检查 (6)3.2.3 传感器与摄像头检查 (6)3.3 行驶过程中的注意事项 (6)3.3.1 保持安全距离 (6)3.3.2 注意观察交通状况 (6)3.3.3 遵守交通信号 (6)3.3.4 遇到特殊情况的处理 (6)3.4 紧急情况下的处理 (6)3.4.1 突发故障 (6)3.4.2 碰撞 (6)3.4.3 紧急制动 (7)第四章:自动驾驶功能使用 (7)4.1 自动驾驶模式的启动与切换 (7)4.1.1 启动条件 (7)4.1.2 启动方法 (7)4.2 自动驾驶功能限制与注意事项 (7)4.2.1 功能限制 (7)4.2.2 注意事项 (7)4.3 自动驾驶过程中的监控与干预 (8)4.3.1 监控 (8)4.3.2 干预 (8)4.4 自动驾驶系统故障处理 (8)4.4.1 故障诊断 (8)4.4.2 故障处理 (8)第五章:环境适应性 (8)5.1 不同天气条件下的驾驶策略 (8)5.2 不同道路条件下的驾驶策略 (9)5.3 夜间行驶操作要点 (9)5.4 环境感知系统的维护与保养 (9)第六章:故障诊断与处理 (10)6.1 故障诊断方法 (10)6.1.1 自诊断系统 (10)6.1.2 人工诊断 (10)6.2 常见故障及其处理方法 (10)6.2.1 传感器故障 (10)6.2.2 执行器故障 (11)6.3 紧急故障处理 (11)6.3.1 车辆失控 (11)6.3.2 系统故障 (11)6.4 维修与保养 (11)第七章:安全防护措施 (12)7.1 被动安全防护 (12)7.1.1 结构设计 (12)7.1.2 乘员约束系统 (12)7.2 主动安全防护 (12)7.2.1 驾驶辅助系统 (12)7.2.2 车辆稳定控制系统 (13)7.3 紧急制动系统 (13)7.4 安全距离控制 (13)第八章:法律法规与合规性 (13)8.1 无人驾驶汽车相关法律法规 (13)8.2 安全操作合规性要求 (14)8.3 驾驶员培训与资质 (14)8.4 法律责任与处理 (14)第九章:用户手册与维护保养 (15)9.1 用户手册内容与使用 (15)9.1.1 用户手册内容概述 (15)9.1.2 用户手册使用方法 (15)9.2 车辆维护保养周期与项目 (15)9.2.1 维护保养周期 (15)9.2.2 维护保养项目 (15)9.3 自我检查与维护 (16)9.4 专业维修与保养 (16)第十章:售后服务与客户支持 (16)10.1 售后服务政策 (16)10.2 客户投诉与处理 (17)10.3 技术支持与升级 (17)10.4 用户反馈与改进 (17)第一章:概述1.1 无人驾驶汽车的定义与分类无人驾驶汽车,顾名思义,是指无需人类驾驶员操作,能够自主完成行驶任务的汽车。
欧盟汽车功能安全法规-概述说明以及解释
欧盟汽车功能安全法规-概述说明以及解释1.引言1.1 概述欧盟汽车功能安全法规是指欧盟对在市场上销售的汽车必须符合的安全标准和规定。
这些法规旨在保障驾驶人员、乘客和行人的安全,并确保汽车在正常使用过程中不会造成危险。
随着汽车科技的不断发展和普及,汽车功能安全已经成为汽车行业的一个重要话题。
本文将从欧盟汽车功能安全法规的概述、重要性以及实施情况等方面进行深入探讨,希望能够为读者带来更多有关汽车安全的了解和认识。
1.2 文章结构:本文将分为三个主要部分,包括引言、正文和结论。
- 引言部分将首先介绍欧盟汽车功能安全法规的概述,然后阐述本文的结构和目的。
- 正文部分将重点讨论欧盟汽车功能安全法规的概述,探讨汽车功能安全法规的重要性,以及分析欧盟汽车功能安全法规的实施情况。
- 结论部分将总结欧盟汽车功能安全法规的影响,展望未来汽车功能安全的发展,并得出本文的结论。
1.3 目的本文的目的在于探讨欧盟汽车功能安全法规的重要性和实施情况,以及对汽车行业和消费者产生的影响。
我们将分析这些法规对汽车安全性和可靠性的提升,以及对汽车制造商和消费者的影响。
通过研究欧盟汽车功能安全法规的发展历程和实施情况,我们可以更好地了解其对汽车行业的推动作用,为未来汽车功能安全的发展提出建议和展望。
通过本文的研究,希望能够引起更多人对汽车功能安全的重视,推动汽车行业的可持续发展。
2.正文2.1 欧盟汽车功能安全法规概述欧盟汽车功能安全法规是欧盟针对汽车行业颁布的一系列法规和标准,旨在确保汽车在设计、生产和使用过程中的功能安全性。
这些法规涵盖了诸多方面,包括车辆控制系统、防撞技术、电子稳定控制系统等。
欧盟汽车功能安全法规的核心目标是保障汽车在各种情况下的安全性能,包括碰撞安全性、防护性、控制性等。
通过制定一系列技术规范和测试要求,欧盟力求提高汽车在各种极端情况下的安全表现,减少事故发生的可能性并最大限度降低事故对人身和财产造成的损害。
权重调整在自动驾驶车辆决策中的应用
权重调整在自动驾驶车辆决策中的应用一、自动驾驶车辆决策概述自动驾驶车辆(Autonomous Vehicles, AVs)是现代交通领域的一项革命性技术,它们能够通过先进的传感器、算法和技术实现自主导航和决策。
自动驾驶车辆的决策系统是其核心组成部分,它负责处理来自车辆内外的大量数据,并作出安全、有效的驾驶决策。
权重调整在这一过程中扮演着至关重要的角色,它确保了决策系统能够根据不同情况和优先级灵活调整其行为。
1.1 决策系统的核心特性自动驾驶车辆的决策系统具有以下核心特性:- 环境感知:通过各种传感器(如雷达、激光雷达、摄像头等)收集车辆周围环境的信息。
- 数据融合:将不同传感器收集的数据进行整合,以获得对环境的全面理解。
- 决策制定:基于环境感知和数据融合的结果,制定相应的驾驶策略和行为。
- 行为执行:将决策转化为具体的驾驶动作,如加速、减速、转向等。
1.2 决策系统的应用场景自动驾驶车辆的决策系统在多种应用场景中发挥作用,包括但不限于:- 城市道路驾驶:在复杂的城市交通环境中进行导航和决策。
- 高速公路巡航:在高速公路上实现稳定的速度控制和车道保持。
- 停车与避障:在寻找停车位或遇到障碍物时作出快速反应。
- 紧急情况处理:在遇到紧急情况时,如车辆故障或交通事故,迅速采取避险措施。
二、权重调整在决策过程中的作用权重调整是指在自动驾驶车辆的决策过程中,根据不同的情境和目标,对各种因素的重要性进行量化和调整。
这种调整对于确保车辆在多变的交通环境中做出最优决策至关重要。
2.1 权重调整的基本原理权重调整的基本原理是通过赋予不同因素不同的权重,来反映它们在特定情境下的相对重要性。
这些因素可能包括但不限于:- 安全性:确保车辆和乘客的安全是自动驾驶车辆的首要任务。
- 效率:在保证安全的前提下,提高行驶效率,减少行程时间。
- 舒适性:提供平稳的驾驶体验,减少乘客的不适感。
- 环境影响:最小化对环境的影响,如减少能源消耗和排放。
欧盟辅助驾驶法规 2026

欧盟辅助驾驶法规 2026近年来,自动驾驶技术得到了长足的发展,许多汽车公司也开始将自动驾驶技术尝试引入各自的车系,这让人们看到了自动驾驶的前景。
而在欧盟辅助驾驶法规方面,欧盟委员会已经提出了一套计划,计划到2026年前,所有车辆必须配备先进的辅助驾驶系统。
这一计划将会在未来数年时间内促进欧盟汽车工业的进一步创新和发展,为人们带来更为安全,便利的驾驶体验。
下面,我们就来一探欧盟辅助驾驶法规2026,了解一下其具体的内容和意义。
一、欧盟辅助驾驶法规的背景随着科技的进步和社会的发展,汽车的智能化、自动化成为了未来汽车行业的发展趋势。
自动驾驶,作为智能化和自动化技术的重要体现,可以让驾驶员更加放松,尤其是在高速公路等流畅公路上,自动驾驶可以降低驾驶员的疲劳度,提高驾驶安全系数。
同时,自动驾驶技术的推广还能够减少车辆碰撞和交通事故,缓解交通拥堵,缩短驾驶时间等。
因此,越来越多的国家和地区开始将自动驾驶技术作为重要的发展方向,同时也出台了相关的政策引导企业积极开展自动驾驶技术研发和生产。
在欧盟辅助驾驶法规方面,欧盟委员会已经提出了一套计划,计划到2026年前,所有车辆必须配备先进的辅助驾驶系统。
这一计划将会在未来数年时间内促进欧盟汽车工业的进一步创新和发展,为人们带来更为安全,便利的驾驶体验。
二、欧盟辅助驾驶法规的内容1、自动泊车系统自动泊车系统是现代汽车科技发展的一个重要成果,它通过控制车辆的行驶,将车辆自动停放在指定位置,可以为驾驶员提供非常便利的服务。
在欧盟辅助驾驶法规中,自动泊车系统将成为所有新车型的标配要求。
而在2022年以后,所有新车型都需要备有“高度自动化泊车系统”,该系统可以使车辆自动找到空闲的泊位,完成自动泊车功能。
2、自适应巡航控制系统自适应巡航控制系统是一种基于雷达和摄像头等技术实现的驾驶辅助系统,它可以自主地控制汽车的速度,保持车辆的安全距离。
在欧盟辅助驾驶法规中,自适应巡航控制系统将成为所有新车型的标配要求。
自动驾驶 功能安全要求

自动驾驶功能安全要求简介随着科技的不断发展,自动驾驶技术已经逐渐被广泛应用于汽车行业中。
它可以有效的改善驾驶安全、减少交通堵塞和提高出行效率。
然而,随着自动驾驶技术的发展,对于自动驾驶汽车的功能安全要求也越来越高。
一旦自动驾驶汽车出现失误,将可能会给人类带来严重的损害。
因此,在自动驾驶技术的开发过程中,必须严格遵守相关的功能安全要求。
功能安全要求的基本概念首先,我们需要了解几个基本概念:1.安全目标:指针对潜在安全威胁制定的预期结果,以确保车辆不会对其周围的环境造成过多的危害。
2.安全性能:指在车辆受到各种不同类型的攻击和故障后,保持安全的能力,通过技术手段来保障行车中的安全。
3.安全等级:用于表明汽车系统对车辆驾驶的影响程度,是评估整个汽车安全的一种重要手段。
4.安全完整性:指车辆在遭受攻击和故障后,仍然保持安全的状态。
因此,自动驾驶技术必须满足整个系统的完整性,以确保车辆在恶劣条件下仍能安全行驶。
自动驾驶技术中的安全要求在自动驾驶技术的实现过程中,存在着以下几个重要的安全要求:1.安全性分析:需要对整个自动驾驶系统进行完善的安全性分析,确定系统中各种可能出现的安全威胁以及对应的安全防护措施。
2.安全性验证:在系统开发过程中,需要定期对安全性进行验证,确保系统的安全性能能够满足相关的安全要求。
3.快速应对:即使在系统运行过程中出现安全性故障,系统也必须能够快速应对并采取相应的措施来保证车辆的安全行驶。
4.学习能力:自动驾驶系统需要具备一定的学习能力,即在不断学习新技术和新知识的同时,保持对安全的高度警惕,并根据学习到的信息来调整系统行为。
总结自动驾驶技术不断发展,成为新时代出行的一个重要趋势。
然而,自动驾驶技术的发展离不开对功能安全的严格要求。
只有通过科学的安全性分析和验证,以及对特定的安全要求的创新性实现,才能让自动驾驶技术真正发挥出其优势,并为人们的生活带来更加便捷和安全的出行体验。
自动驾驶汽车安全性提升

自动驾驶汽车安全性提升随着科技的快速发展和社会的进步,自动驾驶汽车正逐渐走入人们的日常生活。
然而,为了确保道路上的安全,必须不断提升自动驾驶汽车的安全性能。
本文将探讨一些提升自动驾驶汽车安全性的方法和技术。
一、全方位传感器系统自动驾驶汽车的核心是传感器系统,它能够感知周围环境并做出相应的决策。
目前,自动驾驶汽车主要使用的传感器包括激光雷达、摄像头、毫米波雷达等。
为了提高自动驾驶汽车的安全性,可以采用全方位传感器系统,即在车辆的各个方向都安装传感器,从而提供更全面准确的环境感知信息,帮助车辆更好地应对各种复杂交通场景。
二、高精度地图高精度地图是自动驾驶汽车的重要辅助工具。
通过与车辆实时定位系统结合,高精度地图能够及时提供车辆所在位置及周围道路、交通标志等信息。
这对于车辆的路径规划和决策至关重要,能够大大提升车辆的安全性。
因此,在自动驾驶汽车的发展过程中,应不断完善高精度地图的制作和更新机制,确保地图数据的准确性和实时性。
三、智能决策与控制系统自动驾驶汽车需要能够准确地感知周围环境并做出相应的决策,因此需要具备智能决策与控制系统。
这一系统可以通过深度学习和人工智能等技术实现,将大量的传感器数据进行处理和分析,从而为车辆提供准确的决策依据。
同时,智能决策与控制系统还需要能够考虑道路交通规则和人类行为,确保车辆可以安全地与其他车辆和行人共享道路。
四、安全测试与验证自动驾驶汽车的安全性是一个十分严峻和复杂的问题,需要通过大量的安全测试与验证来确保。
这包括在模拟环境和实际道路环境下进行各种场景的测试,以验证自动驾驶汽车在各种情况下的反应和决策是否准确可靠。
只有通过充分的测试与验证,才能提高自动驾驶汽车的安全性。
五、法规和政策制定随着自动驾驶汽车技术的不断进步,相关的法规和政策也需要相应地制定和完善。
这些法规和政策应该明确自动驾驶汽车的安全标准和要求,并对相关的责任和义务进行规定。
此外,政府还应该扶持和引导自动驾驶汽车产业的健康发展,鼓励企业加大研发投入,提高自动驾驶汽车的安全性能。
自动驾驶系统如何应对复杂交通环境

自动驾驶系统如何应对复杂交通环境在当今科技飞速发展的时代,自动驾驶系统成为了汽车领域的热门话题。
然而,要让自动驾驶汽车在复杂多变的交通环境中安全、高效地行驶,并非易事。
复杂交通环境充满了各种不确定性和挑战,如拥挤的道路、恶劣的天气、突发的障碍物以及其他驾驶员的不可预测行为等。
那么,自动驾驶系统是如何应对这些复杂情况的呢?首先,感知能力是自动驾驶系统应对复杂交通环境的基础。
这就好比人的眼睛和耳朵,自动驾驶系统需要通过各种传感器来收集周围环境的信息。
常见的传感器包括摄像头、激光雷达、毫米波雷达等。
摄像头可以像人的眼睛一样获取图像信息,识别道路标志、交通信号灯和其他车辆的外形等。
激光雷达则能够通过发射激光束并接收反射回来的信号,精确测量物体的距离和形状。
毫米波雷达则在恶劣天气条件下表现出色,能够穿透雨、雾、雪等,探测到前方的障碍物。
这些传感器收集到的信息并非孤立存在,而是需要经过融合和处理,才能为自动驾驶系统提供全面、准确的环境感知。
例如,在一个十字路口,摄像头可能会捕捉到交通信号灯的颜色变化,而激光雷达则可以同时测量到其他车辆与自身的距离和相对速度。
通过将这些不同类型传感器的数据进行融合,自动驾驶系统能够更准确地了解周围的交通状况。
其次,决策能力是自动驾驶系统的核心。
在感知到复杂的交通环境后,系统需要迅速做出决策,决定车辆的行驶策略。
这包括选择合适的车速、车道、跟车距离以及何时超车、转弯等。
决策过程中,不仅要考虑当前的交通状况,还要预测未来可能发生的变化。
为了做出合理的决策,自动驾驶系统通常会依赖于预先设定的规则和算法,同时结合机器学习和深度学习技术,不断优化决策模型。
例如,当系统检测到前方车辆突然减速时,它需要迅速判断是跟随减速还是选择变道超车。
如果选择变道超车,还需要考虑相邻车道的车辆行驶情况,以确保操作的安全性。
再者,规划能力对于自动驾驶系统在复杂交通环境中的表现也至关重要。
一旦做出决策,系统需要规划出车辆的具体行驶路径。
自动驾驶汽车可控安全系统评估

自动驾驶汽车可控安全系统评估自动驾驶汽车可控安全系统评估是一个复杂而多维的议题,它涉及技术性能、法律法规、伦理道德、公共安全及用户体验等多个方面。
随着自动驾驶技术的飞速发展,确保其安全可控成为了技术落地与普及的关键。
以下从六个维度对自动驾驶汽车的可控安全系统进行综合评估。
一、技术成熟度与可靠性自动驾驶汽车的可控安全系统首先依赖于高度发达的技术基础。
这包括但不限于先进的感知技术(如雷达、激光雷达、摄像头和超声波传感器),高精度地图,以及强大的计算平台支持下的决策与路径规划算法。
评估这些技术的成熟度,需关注其在不同环境条件下的识别准确率、响应速度和鲁棒性,特别是在复杂交通状况、恶劣天气或道路标志不清晰时的表现。
此外,冗余设计的引入,即关键组件的备份机制,是提升系统可靠性的关键策略,可有效避免单一故障导致的整体失灵。
二、风险预测与应急处理能力自动驾驶汽车的安全系统需具备前瞻性的风险预测与高效的应急处理能力。
这包括但不限于车辆对周围环境的动态预测,如行人行为、其他车辆的意图判断,以及对潜在危险(如突发障碍物)的快速响应。
评估时应考察系统的紧急制动、避障、路线重新规划等功能的执行效率和有效性。
同时,系统的自我诊断与故障报告机制也是重要组成部分,它能及时发现并报告潜在问题,为维修保养提供依据。
三、法律法规兼容性自动驾驶汽车的安全系统必须符合所在地区的法律法规要求。
随着技术的发展,各国和地区纷纷出台相应的法律框架,规定了自动驾驶汽车测试、运营的安全标准和责任归属。
评估过程中需详细审查系统是否满足这些法规要求,如数据记录与隐私保护、事故责任认定规则、远程监控与干预机制等。
此外,还需关注国际间标准的协调性,确保跨国运营的可行性。
四、伦理道德考量自动驾驶汽车在特定情境下可能面临道德抉择,如“电车难题”,即在无法避免碰撞的情况下,如何选择伤害最小的解决方案。
这要求安全系统内置伦理决策模型,能够根据预设原则进行选择。
评估时应考虑模型的透明度、公正性和社会接受度,确保其决策逻辑符合大多数人的道德共识,并且能够有效沟通这些决策背后的逻辑给公众,增强信任。
欧盟r79法规和功能安全
欧盟r79法规和功能安全好啦,今天咱们来聊聊欧盟R79法规和功能安全。
这听起来有点高深莫测,但其实没那么复杂。
简单说,R79法规就是为了让自动驾驶的汽车更加安全,这事儿可不是小事儿,毕竟我们的命可都是宝贵的嘛。
你想想,开车的时候,路上可都是各种各样的突发情况。
有的司机心情好,乐呵呵地开车,有的却像是开战斗机,眼神儿瞄得贼准。
哎,正因为如此,汽车的安全性显得尤为重要。
说到功能安全,大家可能会想,这是什么鬼?简单点说,功能安全就是确保汽车在关键时刻不会“掉链子”。
想象一下,你正在高速公路上行驶,突然刹车失灵,那可真是让人肝儿颤的事儿。
R79法规就像是给汽车戴上了个“安全帽”,确保它在关键时刻能乖乖听话,不会让人失望。
这样一来,咱们开车的时候就能多一份心安,少一份担心,真是太美好了。
你瞧,R79法规还涵盖了许多技术方面的要求。
汽车的传感器、控制系统、通讯协议等等,都得通过严格的检测。
就像是给汽车上了一道严密的“护城河”,不让坏东西进来。
这些技术的标准不仅仅是纸上谈兵,更是经过大量测试和实践验证的,能有效降低事故发生的概率。
这种严谨态度,真是让人心里倍感踏实。
不得不提的就是那些汽车制造商们。
他们为了符合R79法规,可真是绞尽脑汁。
有些厂家甚至干脆把研发团队的工资都提高了,让他们可以吸引更多顶尖人才来解决这些难题。
想想看,能在研发团队里干活,那可真是个高薪职业,谁不想呢?在这个竞争激烈的时代,能推出符合法规的安全汽车,简直就是在给自己打广告,声誉满满。
说到声誉,很多消费者在买车的时候,往往会注意到这些法规的合规性。
这就像是吃饭之前,大家都会看菜单,点菜的时候心里总得有个谱儿。
谁都不想买到个安全隐患满满的车,对吧?R79法规的存在,就让消费者心里有了底,可以更放心地选择。
车好不好,法规来背书,心里可踏实多了。
R79法规可不止是为了保护司机自己。
它还有一个非常重要的目的,就是保护路上的行人、骑自行车的小伙伴,还有那些开摩托车的兄弟们。
无人驾驶如何保护行人和其他道路使用者
无人驾驶如何保护行人和其他道路使用者在当今科技飞速发展的时代,无人驾驶技术正逐渐从科幻走向现实。
然而,随着这项技术的推广和应用,如何确保行人和其他道路使用者的安全成为了一个至关重要的问题。
首先,我们需要明确的是,无人驾驶汽车要保护行人和其他道路使用者,其感知系统必须足够灵敏和准确。
这就好比人的眼睛,要能够清晰地“看到”周围的环境。
感知系统通常包括各种传感器,如激光雷达、摄像头、毫米波雷达等。
这些传感器协同工作,实时收集车辆周围的信息,包括行人的位置、动作、速度,以及其他车辆、障碍物等。
为了更好地识别行人,无人驾驶系统需要具备强大的图像识别和数据分析能力。
比如,通过摄像头捕捉到的图像,能够准确判断出行人是成年人还是儿童,是正常行走还是在奔跑,甚至能够分辨出行人的姿态和表情,从而预测其可能的行动方向。
同时,对于一些特殊情况,如行人在夜间穿着深色衣服、在恶劣天气中出行等,感知系统也要能够及时发现并做出准确判断。
除了感知系统,决策系统在保护行人和其他道路使用者方面也起着关键作用。
当感知系统收集到周围的信息后,决策系统需要迅速做出反应,制定出合理的行驶策略。
这就像是人的大脑,要在瞬间做出正确的决策。
例如,当无人驾驶汽车发现前方有行人突然横穿马路时,决策系统要能够立即计算出刹车的最佳时机和力度,或者选择合适的避让路线,以避免碰撞。
而且,决策系统还要考虑到其他道路使用者的情况,不能因为避让行人而对其他车辆造成危险。
在复杂的交通环境中,决策系统需要综合考虑各种因素,做出最安全、最合理的决策。
在保障行人安全方面,无人驾驶汽车的速度控制也是一个重要环节。
在城市道路、学校区域、人行横道等行人密集的地方,车辆应该自动降低速度,保持谨慎驾驶。
同时,根据不同的路况和行人流量,灵活调整车速,以确保有足够的反应时间来应对突发情况。
另外,通信系统在无人驾驶保护行人和其他道路使用者的过程中也发挥着不可忽视的作用。
通过车与车、车与基础设施之间的通信,无人驾驶汽车可以提前获取道路上的行人信息和交通状况。
自动驾驶汽车决策控制系统简介
自动驾驶汽车决策控制系统简介文/陆文杰 袁建华 罗为明 范志翔1 引言自动驾驶系统是一个集环境感知、决策控制和动作执行等功能于一体的综合系统,是充分考虑车辆与交通环境协调规划的系统,也是未来智能交通系统的重要组成部分。
自动驾驶汽车技术可追溯至20世纪90年代,美国加利福尼亚州曾开展无人车的集中演示。
但由于后期大量科研经费的投入并未得到实际的产出,随后近10年的时间这项技术陷入了鲜有问津的“低潮期”。
直到2004年DARPA (Defense Advanced Research Projects Agency美国国防高级研究计划局)无人车挑战赛的兴起,自动驾驶重新回到人们的视野中。
从2009年谷歌宣布启动自动驾驶研发计划开始,自动驾驶技术进入“快速发展期”。
直到2018年,越来越多的研究发现自动驾驶的技术壁垒很难在短期内被攻克,高等级的自动驾驶距离融入正常交通流可能需要数十年甚至更长的时间。
随后自动驾驶行业开始重组,部分初创企业逐渐销声匿迹,公众开始理性看待自动驾驶,认真思考它的技术路径和应用场景,正如产业界和专家的共识,自动驾驶正在进入发展的“暖冬期”。
本文着重分析自动驾驶决策控制的相关技术,探索未来的发展方向。
2 自动驾驶系统简介通常意义上,自动驾驶系统可以分为感知层、决策层、执行层。
感知层被定义为环境信息和车内信息的采集与处理。
这方面涉及道路边界检测、车辆检测、行人检测等多项技术,可认为是一种先进的传感器技术,所采用的传感器包括激光雷达、摄像头、毫米波雷达、超声波雷达、速度和加速度传感器等。
由于单一传感器存在感知的局限性,并不能满足各种工况下的精确感知,自动驾驶汽车要实现在各种环境下平稳运行,需要运用多传感器融合技术,该技术也是环境感知的关键技术,目前在这方面国内与国外同类技术相比还存在一定的差距。
决策层可以理解为依据感知信息来进行决策判断,确定适当工作模型,制定相应控制策略,替代人类做出驾驶决策。
如何提高无人驾驶技术的鲁棒性与安全性
如何提高无人驾驶技术的鲁棒性与安全性无人驾驶技术的鲁棒性与安全性在现代社会中变得越来越重要。
随着无人驾驶汽车的普及和商业化应用,我们需要确保这些技术能够在各种不同的环境和情况下保持高效和安全。
本文将探讨一些提高无人驾驶技术鲁棒性和安全性的方法。
首先,无人驾驶技术需要强大的感知能力。
无人驾驶汽车需要能够准确地感知周围环境,包括道路状况、其他车辆和行人等。
为了提高感知能力,我们可以使用多种传感器,如激光雷达、摄像头和雷达等。
这些传感器可以提供多重视角和多种数据源,从而增加感知的准确性和可靠性。
此外,还可以利用机器学习和人工智能技术来提高感知算法的性能,使其能够更好地理解和解释不同的场景和情况。
其次,无人驾驶技术需要具备强大的决策能力。
无人驾驶汽车需要能够根据感知到的信息做出准确和安全的决策。
为了提高决策能力,我们可以使用高级算法和模型来分析和预测不同的交通情况。
例如,我们可以使用深度学习技术来识别和理解交通标志和信号,从而更好地规划和控制车辆的行驶。
此外,还可以利用大数据和云计算等技术来实时收集和分析交通数据,以便更好地优化车辆的路径和速度。
第三,无人驾驶技术需要具备强大的控制能力。
无人驾驶汽车需要能够精确地控制车辆的加速、制动和转向等动作。
为了提高控制能力,我们可以使用先进的控制算法和技术。
例如,我们可以使用模型预测控制(MPC)算法来实时优化车辆的控制策略,从而使其能够更好地适应不同的驾驶环境和条件。
此外,还可以利用机器学习和强化学习等技术来提高车辆的自主决策和控制能力,使其能够更好地应对突发情况和变化。
最后,无人驾驶技术需要具备强大的安全保护机制。
无人驾驶汽车在操作过程中可能会遇到各种故障和问题,如传感器故障、通信问题和电力失效等。
为了提高安全性,我们需要在系统设计和实施中考虑到这些潜在问题,并采取相应的安全保护措施。
例如,我们可以使用冗余传感器和控制系统来提高系统的容错能力,使其能够在某些组件失效的情况下继续安全运行。
自动驾驶简介介绍

01
02
03
传感器类型
雷达、激光雷达(LiDAR )、摄像头、超声波等。
感知范围
识别周围环境中的障碍物 、道路标志、交通信号灯 等。
感知精度
对障碍物的距离、速度、 角度等参数进行精确测量 。
路径规划与决策控制技术
路径规划
根据起点和终点,规划出 一条或多条安全、高效的 行驶路径。
决策控制
根据当前环境和车辆状态 ,选择最佳的行驶路径和 速度,确保行车安全。
政策法规不断完善助力发展
政策法规逐步完善
各国政府将逐步完善自动驾驶相关的法律法规,为自动驾驶的商 业化应用提供法律保障。
交通基础设施改造
政府将加大对交通基础设施的投入,改造道路、交通信号灯等基础 设施,以适应自动驾驶的发展需求。
公共安全与隐私保护
政府将加强对公共安全和隐私保护的监管,确保自动驾驶技术的安 全性和合规性。
随着传感器技术、计算能力和算法的进步,自动驾驶系统 的感知、决策和执行能力将不断提升,逐步实现更高级别 的自动驾驶。
5G/6G通信技术助力
5G/6G通信技术的应用将为自动驾驶提供更稳定、更快速 的数据传输和处理能力,提升自动驾驶系统的实时性和安 全性。
人工智能与大数据融合
人工智能和大数据技术的融合将为自动驾驶提供更精准的 预测和决策支持,推动自动驾驶技术的智能化发展。
跨界合作拓展应用领域
产业链上下游合作
01
自动驾驶产业链上下游企业将加强合作,共同推动自动驾驶技
术的发展和应用。
与出行服务企业合作
02
自动驾驶技术将与出行服务企业合作,共同开发共享出行、智
能交通等应用场景。
与科技公司合作
03
自动驾驶汽车未来交通的新趋势
自动驾驶汽车未来交通的新趋势随着科技的不断发展,自动驾驶汽车正逐渐成为未来交通的新趋势。
自动驾驶汽车,简称AV(Autonomous Vehicles),是指能够在道路上行驶而无需人类驾驶者主动操控的汽车。
自动驾驶汽车的出现将在未来交通中发挥重要作用,对交通系统、城市规划、环境保护和出行方式等方面带来巨大的影响。
一、提升交通安全性自动驾驶汽车搭载了各种先进的传感器和高精度地图,能够实时感知周围环境并做出相应的决策和操作。
相比于人为驾驶,自动驾驶汽车在遵守交通规则和规定的同时,具备更高的反应速度和准确性,有效减少了交通事故的发生。
根据统计数据,超过90%的交通事故是由人为驾驶错误引起的,而在自动驾驶汽车中,这些人为因素会被大大降低,从而提升交通安全性。
二、改善交通效率自动驾驶汽车可以通过智能路线规划和实时通信技术,减少拥堵和交通阻塞情况的发生。
它们能够更好地调整行驶速度和车辆间距,合理利用道路资源,实现交通系统的高效运作。
此外,自动驾驶汽车还能够通过共享经济模式,提供便捷的出行服务,减少车辆拥有量,降低交通流量,从而进一步改善交通效率。
三、减少能源消耗和环境污染自动驾驶汽车在能源利用效率和环境友好性方面具备优势。
由于其智能的行驶和制动控制,自动驾驶汽车能够更加高效地利用能源,减少了无效的驾驶和急刹车情况。
此外,自动驾驶汽车的智能路线规划和行驶速度控制,也能够减少排放物的产生,降低对环境的污染。
这将对解决城市交通拥堵和改善空气质量产生积极作用。
四、改变出行方式和城市规划自动驾驶汽车的出现,将改变人们的出行方式和城市规划。
随着自动驾驶技术的普及推广,人们将更多地选择使用自动驾驶汽车代替传统汽车,通过共享服务或者租赁模式来实现出行需求。
这将减少城市中个人拥有车辆的数量,带来城市资源的重构和城市规划的重新思考。
例如,城市可以更多地将停车场改造为其他功能区域,提高土地利用效率,优化城市布局。
五、面临的挑战和解决方案尽管自动驾驶汽车前景光明,但仍面临着一些挑战。
自动驾驶系统交通流动全局路径规划

自动驾驶系统交通流动全局路径规划自动驾驶技术是当今科技领域的重要发展方向之一,其带来的潜在改变对我们的生活和交通方式产生了深远的影响。
而在自动驾驶系统中,路径规划是至关重要的一环,它决定了车辆如何在复杂的道路网络中安全、高效地行驶。
在本文中,我们将讨论自动驾驶系统交通流动的全局路径规划。
全局路径规划是指基于车辆当前的起点、终点以及地图等信息,确定车辆在整个行驶过程中沿途经过的路线。
其目标是在考虑交通状况、道路限制和用户需求的前提下,找到一条最佳路径,使得车辆能够高效、安全地到达目的地。
首先,全局路径规划需要考虑交通状况。
自动驾驶系统利用各类传感器实时感知道路上的其他车辆、行人和交通信号灯等信息,并结合历史数据和交通监控系统的反馈,分析当前交通状况。
根据这些信息,系统可以确定道路的拥堵情况,避开繁忙的路段,选择更加畅通的路径。
其次,全局路径规划还需要考虑道路限制。
道路限制包括道路等级、车道数、车辆限速等因素。
自动驾驶系统通过与地图、交通管理机构的连接,获取道路限制等相关信息。
在规划路径时,系统会根据这些限制条件,选择适合车辆驾驶的道路和车道。
此外,全局路径规划还需要兼顾用户需求。
自动驾驶系统通过与用户APP或导航系统的交互,获取用户输入的目的地和偏好,如是否偏好高速公路、是否最短路径等。
基于用户需求,系统会对路径规划进行调整,以确保用户可以得到满意的行驶体验。
为了实现高效的全局路径规划,目前的自动驾驶系统采用了各种算法和方法。
其中,经典的算法包括A*算法、Dijkstra算法和遗传算法等。
这些算法根据不同的问题设置不同的权重和约束条件,通过搜索、评估和选择等步骤,找到最佳路径。
另外,还有一些基于机器学习的路径规划方法,通过对历史数据和行为模式的学习,能够根据环境变化和用户需求进行智能化的路径规划。
全局路径规划在自动驾驶系统中的重要性不言而喻。
它不仅影响着车辆的行驶效率和安全性,也直接关系到乘客的出行体验和用户的满意度。
全球十大国家无人驾驶汽车规划及政策
全球十大国家无人驾驶汽车规划及政策一、全球无人驾驶汽车市场格局及规划从国际自动驾驶产业总体发展情况看,美国、德国全面领先,处于第一梯队,引领国际产业前沿。
其中,美国以创新生态为引领,以科技进步为导向,处于全面领先地位;德国以大型车企为引领,整合全球资源,以全面商用为目标,也居于战略高位。
两者发展水平远远领先于日本、韩国、中国、英国等国家。
根据主要发达国家政府、汽车制造企业及互联网企业的计划或愿景,2020年是自动驾驶汽车实用化的一个关键时间节点。
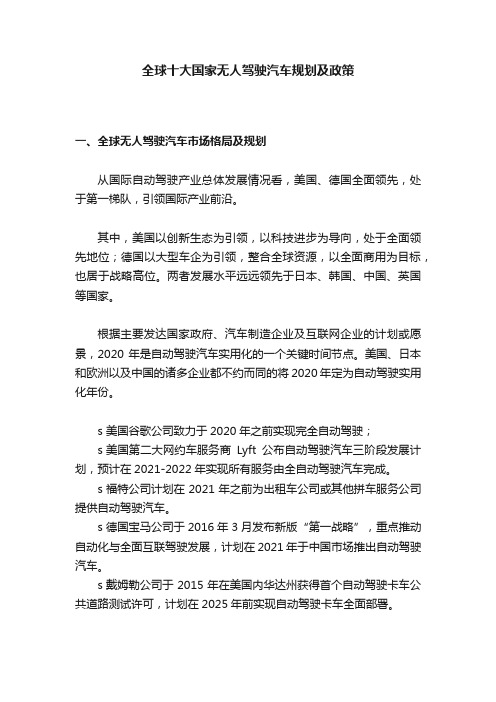
美国、日本和欧洲以及中国的诸多企业都不约而同的将2020年定为自动驾驶实用化年份。
s 美国谷歌公司致力于2020年之前实现完全自动驾驶;s 美国第二大网约车服务商Lyft公布自动驾驶汽车三阶段发展计划,预计在2021-2022年实现所有服务由全自动驾驶汽车完成。
s 福特公司计划在2021年之前为出租车公司或其他拼车服务公司提供自动驾驶汽车。
s 德国宝马公司于2016年3月发布新版“第一战略”,重点推动自动化与全面互联驾驶发展,计划在2021年于中国市场推出自动驾驶汽车。
s 戴姆勒公司于2015年在美国内华达州获得首个自动驾驶卡车公共道路测试许可,计划在2025年前实现自动驾驶卡车全面部署。
图表 1 主要企业发展自动驾驶的时间资料来源:一览众咨询二、全球无人驾驶汽车政策及规划对比目前除美国已经发布了比较完整的自动驾驶汽车法规,其他国家对于自动驾驶、智能网联相关政策标准的制定仍在进行当中。
整体来看,各国在相关法规标准的制定上无外乎这几点:定义、分级、技术开发、汽车制造以及各项安全法规和道路交通规则等,涵盖智能网联汽车发展的各个方面,这也决定了智能网联汽车发展必然是一个漫长的过程。
联合国关于道路交通管理的《维也纳道路交通公约》2016年获得修正,为自动驾驶技术在交通运输中的应用清除了障碍。
2016年3月23日,《维也纳道路交通公约》一项有关车辆自动驾驶技术的修正案当天正式生效,这项修正案明确规定,在全面符合联合国车辆管理条例或者驾驶员可以选择关闭该技术的情况下,将驾驶车辆的职责交给自动驾驶技术可以被应用到交通运输中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AUTONOMOUS DRIVING A MAJOR DISRUPTION FORAUTOMOTIVE INDUSTRYRémi BASTIENAUTONOMOUS DRIVING MORE AND MORE ON STAGE90%accidents due to human errors78 minutes each day in car, in Ile de France45%of French population with access to public transport 30% to 60% delivery time for driving in urban city FOUR HIGH STAKES FOR MOBILITYTRUE AUTOMATION STARTS FROM LEVEL 3 (SAE)Drivercontinuously performs the longitudinal and lateral dynamic driving taskDrivercontinuously performs the longitudinal or lateral dynamic driving taskDriver must monitor the dynamic driving task and the drivingenvironment at all timesNo intervening vehicle system activeThe other driving task isperformed by the systemSystem performslongitudinal and lateral driving task in a defined use caseSystem performs longitudinal andlateral driving task in a defined use case. Recognizes its performance limits and requests driver to resume thedynamic driving task with sufficient time margin.A u t o m a t i o n ←→D r i v e rLevel 0Level 1Level 2Level 3Level 4Level 5Driver OnlyAssistedPartial AutomationConditional AutomationHigh Automation Full Automation Driver is not required during defined use caseSystemperforms the lateral and longitudinal dynamic driving task in all situations in a defined use case.Systemperforms the lateral and longitudinal dynamic driving task in all situations encountered during the entire journey. No driver required.Driver does not need to monitor the dynamic driving task nor the driving environment at all times; however he must be attentive to and follow system’s requests / warnings to resume the dynamic driving task.*terms acc. to SAE J3016Authorised by Vienna conventionNot yet authorised by Vienna conventionUser ValueTechnical & Legal ComplexityLane changeCom-mutingSingle lanedriver-lessBig Data Collection Partnership with IT industryDeep Learningtele-op.+Traffic jam B to BB to CLevel 2 : assistance to the driver Level 3 : conditional automation Level 4 : high automation Level 5 : full automationCity DrivingHighwayIncl. City highwayTraffic jamTWO MAJOR FIELDS FOR AUTOMOTIVE CAR MAKERSLong run OEMValet parkRENAULT VISION FOR AUTONOMOUS DRIVINGSTRESS-FREE BENEFITFREE TIME BENEFITSAFETY BENEFITAUTONOMOUS DRIVEMANUAL DRIVEDRIVING PLEASUREAUTONOMOUS DRIVING BEYOND ADASOnly active under driver’s requestActive only in limited conditions and vehicle proposalABS ESP AEBContinuously active Without driver interventionEMERGENCY / SAFETYASSISTANCEParkingACC LKA STRESS FREE / FREE TIME :AUTONOMOUSDRIVINGTHE NECESSARY TECHNOLOGY FOR ADCore technologies RedundacySUCCESS CONDITIONS : SOCIAL ACCEPTANCESocial acceptance Experimentation ▪Regulations▪Proof by FOT on certified roads ▪Product Liability▪Infrastructure▪Insurance▪Consumer awareness▪Driver EducationTHE MAJOR STAKE IS SAFETYSYSTEM OF SYSTEM & LOCALIZATIONADAS (L1, L2, L3)AD(L3+(1), L4, L5)Driver is the last resort System is the last resort Driver reliability proof System reliability proofDriver training + experienceMassivemile accumulation + resimulation AD IS A MAJOR DISRUPTION(1)Emerging GermanL3 standard (Audi,BMW, Daimler)(2)Tentativeconsensus amongEuropean OEMISO 26262 defines how to assess a risk and the necessaryactivities to perform for each step:SystemSoftwareHardwareProduction...Redundancy for Autonomous Driving:Redundant Sensors & ActuatorsRedundant Communication NetworksRedundant Power supply NetworksSAFETY DEVELOPMENT AND VALIDATION▪Additional Safety Stakes:For Autonomous Driving, Automotive EEArchitecture has to switch from Fail Safe designto Fail Operational.Safety has also to consider SOTIF (Safety ofthe Intended Functionality)SAFETY & SOTIFDoes a camera canidentify a target in avery large roundaboutwithout lane ?Does a radar willbe accurate on ametallic bridge ?Does an ultrasoundsensor can detect achild with a woolsweater?ISO 26262 Standard is necessary but not sufficient !evolutiveprovenFIRST CONDITION : E/E ARCHITECTURE BASED ON 4 LAYERS TO ENSURE ASILDSECOND CONDITION :THE VALIDATION STRATEGY TO DEMONSTRATE ASIL DI Statistical safety threshold II Reduction :Experience plan + SimulationIII Road sections criticity inductorsIV Map of road sections with criticity V Clustered road tests VI Final proof of reliabilityReliable and efficient validation<<< 20 Billions kmOrder of magnitude for validation:20Billions of kmsNon affordable by physical test driveNumerical simulationTargetted, iterative physicaltest driveFor each road section,calculate the«criticity cube»:Nb incoming lanes x Nb exits x Strong Curvature…Each road section is ranked by its criticity ratio=criticity cube volume/average criticityDistribution of clusters is proportional to the criticityratio of the road sectionsJOINT PRECOMPETITIVEWORKS INFRANCESCENARIO IDENTIFICATION (MOOVE PROJECT)1. Data collect 0.Use caseDefinition&Targetedscenarios 2.Datatransformationat commonformat3.Calculation ofhigh levelparameter(Sensorsindependant)4.Scenariosearching andclusteringRelative_Velocity_XRelative_Velocity_YAbsolute_Velocity_XAbsolute_Velocity_YRelative_Accel_longiAccel_longi…..Time_To_CollisionTime_Between_VehiclesStatus_MobilePos_XPos_Y1. Real world driving safety critical scenarios (SCS)2. SCS occurrence statistics3. New SCSDIGITAL SCENARIO LIBRARY & TEST CASE GENERATION (SVA PROJECT)1. Simulation platform2. Digital Scenarios libraryDIGITAL SCENARIO LIBRARY IMPLEMENTATIONCONCLUSIONAUTONOMOUS & CONNECTED OFFER BY 2022MOBILITY SERVICESRobot –vehicles operationsAUTONOMOUS VEHICLES15 models with autonomousdriving technologiesCONNECTED SERVICES100% connected carsRENAULT IS ON TRACK!。