工程光学第六章 光线的光路计算及像差理论
工程光学第6章光线的光路计算及像差理论
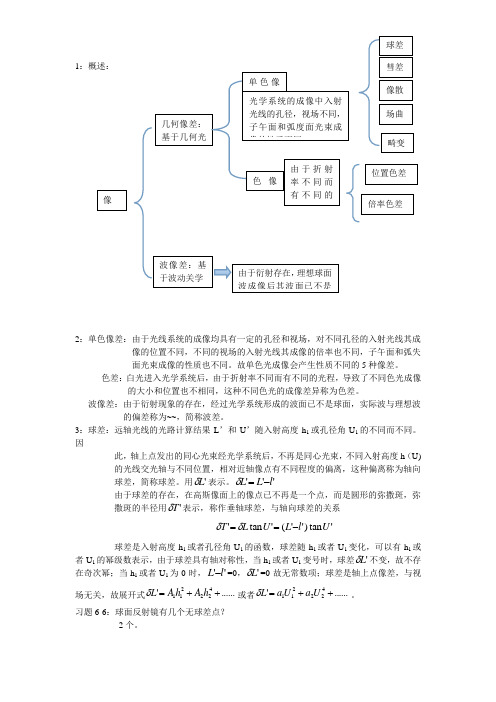
1:概述:2:单色像差:由于光线系统的成像均具有一定的孔径和视场,对不同孔径的入射光线其成 像的位置不同,不同的视场的入射光线其成像的倍率也不同,子午面和弧失 面光束成像的性质也不同。
故单色光成像会产生性质不同的5种像差。
色差:白光进入光学系统后,由于折射率不同而有不同的光程,导致了不同色光成像 的大小和位置也不相同,这种不同色光的成像差异称为色差。
波像差:由于衍射现象的存在,经过光学系统形成的波面已不是球面,实际波与理想波 的偏差称为~~,简称波差。
3:球差:远轴光线的光路计算结果L ’和U ’随入射高度h 1或孔径角U 1的不同而不同。
因此,轴上点发出的同心光束经光学系统后,不再是同心光束,不同入射高度h (U) 的光线交光轴与不同位置,相对近轴像点有不同程度的偏离,这种偏离称为轴向 球差,简称球差。
用'L δ表示。
'''l L L -=δ由于球差的存在,在高斯像面上的像点已不再是一个点,而是圆形的弥撒斑,弥 撒斑的半径用'T δ表示,称作垂轴球差,与轴向球差的关系'tan )''('tan 'U l L U L T -==δδ球差是入射高度h 1或者孔径角U 1的函数,球差随h 1或者U 1变化,可以有h 1或者U 1的幂级数表示,由于球差具有轴对称性,当h 1或者U 1变号时,球差'L δ不变,故不存在奇次幂;当h 1或者U 1为0时,''l L -=0,'L δ=0故无常数项;球差是轴上点像差,与视场无关,故展开式......'422211++=h A h A L δ或者......'422211++=U a U a L δ。
习题6-6:球面反射镜有几个无球差点?2个。
像几何像差:基于几何光波像差:基于波动关学 由于衍射存在,理想球面波成像后其波面已不是单色像色像由于折射率不同而有不同的光学系统的成像中入射光线的孔径,视场不同,子午面和弧度面光束成像的性质不同 球差彗差 像散 场曲 畸变 位置色差 倍率色差。
第6章光线的光路计算及像差理论.
细光束弧矢场曲:前后细光束交点离理想像平面 的距离。
畸变:主光线和理想像面交点与理想点的 垂轴距离;
轴外像差小结
宽 宽与上细上细光 光细下前光下畸光束束光光后束、轴前变束子弧束线光子前外 后:弧午 矢(的线上午后点 光主矢场 场交的下场光也 线光场曲 曲点交光曲线有 交线曲: :偏点线:交球点和的:上前离偏)上点像差(的理垂前下后主离像下的的点,想距轴后光光光主点细距沿沿宽像离距细线线线光)光离轴与轴光面;离光交交(线束垂。距细距束交;束点点(交轴垂离光离(点交离离上点距轴:束—与点理理下离离距宽(—前理离想想细光理)离光子:后想理像 像光线想)束午子:光像想平 平束)像像交轴午弧线点像面 面像平散点外彗矢)平的 的散像面(球差彗像面距 距X点x差差点离 离;的.。); 。 就是弧矢轴外球差。
物空间 n
法线
E
I
折射球面
像空间 n´
入射光线
B
物
-U
I
h
折射光线
U
A
A
光轴 O
C
像
r
B
-L
L´
第四节 轴外像差 预备知识
了解成像光束光线的全貌,需要看光束在两 个平面——子午平面和弧矢平面上的分布情况。 子午平面:由轴外物点和光轴所确定的平面。 弧矢平面:过主光线且与子午平面垂直的平面。
子午光线 弧矢光线
sinU
可以证明,齐明点满足正弦条件。
等晕条件
实际由于球差存在,只能要求近轴轴外点具有和轴 上点相同的成像缺陷。此时称等晕成像,需要满足 的条件就比正弦条件降低了,称等晕条件。
前后光线的交点偏离主光线(垂轴距离):弧矢彗差
轴外点也有球差,宽光束(上下光线)交点(像点) 与细光束(上下光线)像点沿轴距离——子午轴外球差。
工程光学讲稿像差
n
n'( >n)
UA O A'
物点位于球面旳球心处,即 L=r此时物点
发出旳全部光线将沿球面旳法线方向入射
,即入射角I=0根据折射定律,折射角也
C
-U
A,A'
I'=0,光线无偏折地经过球面,像点也将位
于球心处,即L'=r。
(3) sinI’-sinU=0,即I’=U,因为
L0
sin I' n sin I / n' n(L r)sinU / n'r
§6-2 轴上点旳球差
一、 球差定义及表达措施
1、轴向球差
由实际光线旳光路计算公式知,当物距L为定值时,像距L’与入射高 度h1及孔径角U有关,伴随孔径角旳不同,像距L‘是变化旳,即如图所示:
轴上点A点发出旳光束,对于光轴附近旳光用近轴光路计算公式,像点为 A0’(看作高斯像点),对于实际光线采用实际光计算公式,成像于A’1 (实际像)。
(sin I (L-r)sinU r)
故可得: L (n Ln') rn/nnn ' r
同I '理,U由sin I sUinU' '可得出
L ' 0A'
L' (n n')r / n'
I
-U AC
n
-I' n'( <n)
由上式拟定得共轭点,不论孔径角U多大,均不产生球差。由上式也可 得出,nL=n’L’ ,则垂轴放大率β=nL’/n’L=(n/n’)2
单色像差——光学系统对单色光成像时所产生旳像差。 几何像差: 球差、彗差、像散、场曲、畸变 。
色差——不同波长成像旳位置及大小都有所不同。
电子教材-光线的光路计算

工程光学 Engineering Optics
第六章 第二节 光线的光路计算
四、子午面内光线的特殊情况
1.折射平面
I = −U ⎧ ⎪ sin I ' = n sin I / n' 远轴光线 ⎪ ⎨ U ' = −I ' ⎪ ⎪ L' = L tan U / tan U ' ⎩
i = −u ⎧ ⎪ i' = n ⋅ i / n' ⎪ 近轴光线 ⎨ u' = −i' ⎪ ⎪l ' = l ⋅ u / u' = l ⋅ n' / n ⎩
工程光学 Engineering Optics
第六章 第二节 光线的光路计算
第一章回顾 单个折射球面光路计算
BUPT Automation School
北京邮电大学 自动化学院
宋 晴
工程光学 Engineering Optics
第六章 第二节 光线的光路计算
二、子午面内近轴光线的光路计算
1.轴上点近轴光线(细光束)——“第一近轴光线”
解:按照“轴上点远轴光线”公式: 由 (La, Ua) (La’, Ua’) 由 (Lz, Uz) (Lz’, Uz’) 由 (Lb, Ub) (Lb’, Ub’) 由 L L’ 像高: 上光线 ya ' = ( La '− L' ) tan U a ' 主光线 y z ' = ( La '− L' ) tan U z ' 下光线 yb ' = ( Lb '− L' ) tan U b ' 实际像高 BUPT Automation School 北京邮电大学 自动化学院 宋 晴
工程光学第六章像差理论.

几何像差分类
场曲 轴外点细光束 使像变形
畸变
(Deformation of image)
白光像差 位置色差(轴向色差:波长不同会聚点不同) (chromatic aberration) 倍率色差(垂轴色差:波长不同放大率不同)
基于物理光学:波象差(实际波面与理想球面波的偏差)。
第一节 概述
像差校正:
不同孔径的入射光线成像位置不同; 不同视场的入射光线成像倍率不同; 从而产生几何像差. 子午面和弧矢面的成像性质不同:
弧矢面:过主光线和子午面垂直的平面。
1、像差定义 实际光学系统都有一定大小的孔径和视场,远远超
出近轴区所限定的范围,与近轴区成像比较,必然在 成像位置、像的大小方面存在一定的差异。
n
1、轴上点远轴光线光路计算 A U
E
I
n
h
I
U
A
o
C
物点位于无穷远:sin I1 h1 r1 物点位于有限远:
r
L
L
轴上点远轴光线光路计算
AEC中,sin I (L r) sin U
r
在E点由折射定律:sin I n sin I
n UU I I
AEC中, L r(1 sin I )
2.反射面
反射面可以作为折射面的一个特例,只要令:nn
并令反射面以后光路的间隔d为负值即可。
第二节 光线的光路计算
二、轴外点沿主光线的细光束光路计算
此计算是沿主光线进行,主要研究子午面内的子午细光束和 在弧矢面内的弧矢细光束的成像情况.
子午面:物点(或主光线,即通过孔径中心的光线)所在并包 含光轴的平面。对于轴对称系统的轴上物点,它有无限多个子 午面。对于一给定的轴外物点,仅有一个子午面。
(工程光学教学课件)第6章 光线的光路计算及像差理论
无像质要求系统:
(1)
有像质要求的一般系统:
(1)、(2)
有像质要求的大视场系统: (1)、(2)、(3)
有像质要求的大视场、大孔径系统:(1)、(2)、(3)、(4)
光线光路的计算主要有三类:
✓子午面内的光线光路计算 ✓沿轴外点主光线的细光束像点的计算 ✓子午面外光线或空间光线的计算
子午面内的光线光路计算
L' )tgU L' )tgU
' a
' z
Yb'
( L'b
L' )tgU
' b
B’b B’z
B’a
Y’b
Y’z Y’a
-U’a
P’ -U’z -U’b
O
A’o
--L’a
--L’b
--L’z --L’
3.折射平面和反射平面的光路计算
远轴光按大L公式进行计算:
sin I L r sin U r
补充:五、光学设计的一般过程和内容 (了解)
(1) 成像要求:基本类型,视场,观测方式,景深,渐晕, 分辨率,仪器尺寸,其它要求等;
(2) 建立理想 基本光组数量,焦距,成像光路,物像共轭距、 系统模型:物像四要素,反射棱镜(用平行平板表示)等;
(3) 构造基本 按最低数量配置透镜,初步确定透镜的材料、 光学系统:形状、孔径、曲率半径等参数,配置必要光阑, 确定反射棱镜的形状和大小,其它器件等;
(4) 光线计算 以理想成像为标准,用光线理论进行实际光线 求 像 差:的光路计算,以确定各类像差;
(5) 像质评价:按照系统像质要求,确定主要和次要像差, 并进行像差评价和分析,研究改善方案;
修正设计:通过对系统各类参数的调整和增加透镜,重复 前面(3)、(4)步骤,逐渐校正像差,最终达到 系统的像质要求。
第六章 光线的光路计算及像差理论

下光线tgUb ( y h)
y ( L l )tgU
' z '
' z ' b
y ( L l )tgU
' b ' b '
3.折射平面和反射面的光路计算 折射平面远轴光线的光路计算公式: I U
sin I n sin I
'
n
'
U ' I ' L' LtgU tgU '
' 1 ' 2
' k 1
d k 1
校对公式:h lu l 'u ',J n 'u ' y ' nuy
' 求焦距公式:令1 , u1 , f ' h1 / uk l
轴外点近轴光线光路计算 (第二近轴光线光路计 算):求出理想像高。
初始数据:l z , u z y /(l z l1 ) 像高数据:y (l l )u
1
n
作业
1,2,11,12,17
路计算 2.轴外点沿主光线的细光束光路计算 3.子午面的空间光线光路计算
二、子午面内的光线光路计算: 1.近轴光线光路计算:求出理想像的位置
和大小
近轴光线光路计算
(第一近轴光线光路计算):求出理想像的位置
l r i u r n i' i n' u' u i i' i' l ' r (1 ) u'
第六章 光线的光路计算 及像差理论
实际光学系统与理想系统之间存在差异;实际像和 理想像之间的差异称为像差。
大学工程光学第六章
e光:546.1nm
F光:486.1nm
C光:656.3nm
原则:对光能接收器最灵敏的谱线校正单色 像差,对接收器所能接收的波段范围两边缘 附近的谱线校正色差。
工程光学
工程光学
色差: (位置色差和倍率色差)
同一材料对不同波长的光折射率n不同。
1 1 1 1 (n 1)( ) f' r1 r2 f
工程光学
点列图
工程光学
由一点发出的许多光线经光学系统后,因像差使其与 像面的交点不再集中于同一点,而形成了一个散布在 一定范围的弥散图形,称为点列图。,点列图是在现 代光学设计中最常用的评价方法之一。 使用点列图,一要注意下方表格中的数值,值越小成 像质量越好。二根据分布图形的形状也可了解系统的 几何像差的影响 RMS RADIUS:均方根半径值; GEO RADIUS:几何半径(最大半径)
工程光学
第六章 光线的光路计算及像差理论
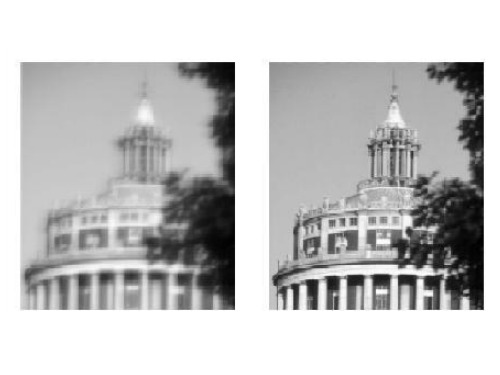
实际光学系统的成像是不完善的,光线经光学 系统各表面传输会形成多种像差,使成像产生模糊、 变形等缺陷。像差就是光学系统成像不完善程度的 描述,是实际像与理想像之间的差异。
色差 轴上点像差 单色像差
几 何 像 差
球差
慧差、像散、 场曲、畸变
轴外点像差
工程光学
D光:589.3nm
n 2 ( ) n'
工程光学
球差曲线纵坐标是孔径,横坐标是球差(色球差),使 用这个曲线图,一要注意球差的大小,二要注意曲线的 形状特别是代表几种色光的几条曲线之间的分开程度, 如果单根曲线还可以,但是曲线间距离很大,说明系统 的位置色差很严重。
工程光学
轴外点像差
主光线:某视场点发出的通过入瞳中心的实际光线 第一近轴光线:轴上物点A发出的通过入瞳边缘点的 “近轴”光线 第二近轴光线:轴外某视场点发出的通过入瞳中心的 “近轴”光线
光线光路及像差理论
⎧
n2 = n1′ , n3 = n2′ ,LLnk = nk′ −1,
⎪⎪ ⎨ ⎪
u2 = u1′ , u3 = u2′ ,LLuk = uk′ −1, y2 = y1′ , y3 = y2′ ,LL yk = yk′ −1,
⎪⎩l2 = l1′ − d1, l3 = l2′ − d2 LLlk = lk′ −1 − dk−1
§6-1 概述
一、基本概念 实际的光学系统都是以一定的宽度的光束对具有一定大小的物体进行成像,
由于只有近轴区才具有理想光学系统性质,故不能成完善像,就存在一定的像差。 1、像差定义:――实际像与理想像之间的差异。 2、像差的分类 几何像差―――以几何光学为基础,优点:计算简单、意义直观 波像差――实际波面与理想波面之间的光程差异,常用来作为评价光学 系统成像质量,是几何像差的综合体现。尤其对于小像差系 统,波像差更能反映像质。 几何像差: 单色像差――光学系统对单色光成像时所产生的像差。 轴上点像差――它随着孔径增大而发生变化/产 生的像差。球, 轴外像差―――它随着孔径及视场的增大而产生 的像差。彗, 色差―――不同波长成像的位置及大小都有所不同。 色差又分为: 位置色差――体现不同色光的成像位置的差异 倍率色差――体现不同色光的成像大小的差异。 3、像差产生的原因 在第一章我们曾讲过近轴光/实际光的光路计算公式。
与最强谱线、光学系统的透过波段相匹配。
§6-2 光路计算
一、子午面内的光线的计算
子午面―――轴外点与光轴构成的平面。
(一)近轴光计算
1、轴上点近轴光的光路计算
近轴光――指光轴附近的光,也可指用弧度取代正弦的光,它们的结果
相一致。在这里要特别说的是第一近轴光――指孔径角对入瞳边缘光线的取值。
6光线的光路计算及像

球差是入射高度h1或孔径角U1的函数,球差随h1或U1的变化 规律,可以由h1或U1的幂级数表示。由于球差具有轴对称性, 当h1或U1变号时,球差δL′不变,级数展开时不存在h1或U1 奇次项;当h1或U1为零时,像方截距L′ = l ′,即δL′ = 0, 所 以展开式中没有常数项;球差是轴上点像差,与视场无关, 所以展开式中无y或ω项,所以球差可以表示为:
波动光学:波像差; 波动光学:波像差; 研究像差的目的: 研究像差的目的: 根据光学系统的作用和接收器的特性把影响像质的主要像差校正到 某一公差范围内,使接收器不能察觉,即认为像质是满意的。 某一公差范围内,使接收器不能察觉,即认为像质是满意的。
6.1.2 像差计算的谱线选择
单色像差: 对光能接收器最灵敏的谱线校正单色像差; 单色像差: 对光能接收器最灵敏的谱线校正单色像差; 色差: 对光能接收器所能接收的波段范围两边缘附近的谱线校正色差; 色差: 对光能接收器所能接收的波段范围两边缘附近的谱线校正色差; 匹配: 光源、光学系统材料、接收器的光谱特性; 匹配: 光源、光学系统材料、接收器的光谱特性; 目视光学系统(人眼观察用) 目视光学系统(人眼观察用) 单色像差: 光 接近(555) 单色像差:D光(589.3) e光(546.1) →接近 光 色差: 光 色差:F光(486.1) C光(656.3) 光 普通照相系统(照相底片) 单色像差: 光 普通照相系统(照相底片) 单色像差:F光 色差: 光 色差:D光,G’光(434.1) 光 近红外、 近红外、近紫外光学系统 激光系统: 只校准单色像差(用照明光源),不校准色差, ),不校准色差 激光系统: 只校准单色像差(用照明光源),不校准色差,因单色 光照明。 光照明。
6.1.3 像差成因
6第6章 光线的光路计算及像差理论
作业:完成本例题的光路追迹!
计算举例
一望远物镜的焦距f’=100mm,相对口径D/f’=1/5, 视场角2ω=6°,其结构参数如下:
r/mm 62.5 -43.65 -124.35 d/mm 4.0 2.5 nD 1.51633 1.67270 νD 0.00806 0.015636
试求该物镜的第一、二近轴光线成像特征和远轴光线 成像特征,以及主光线细光束成像特征。
轴上点的球差
球差的定义和表示方法
1、球差的定义
轴上点发出的同心光束,经光学系统各个折射面折射 后,不同孔经角U的光线交光轴于不同点上,相对于 理想像点的位置有不同的偏离,这就是球面像差,简 称球差。它由孔径引起。 L' L' l '
L' 0 球差校正不足 或欠校正
L' 0 球差校正过头 或过校正
Lz1 0.8025
用大L公式进行光线追迹: L' z 3.378 U z ' 259'6' '8 实际像高: ys ' (L'z l ' ) tanU '3 5.2351 实际像高与理想像高差:
y' ys ' y' 0.007
解:
沿主光线细光束计算的初始数据: t1 s1 l1 h1 10 mm
用小l公式分别对y1=0.3Y、0.5Y、0.707Y、0.85Y、Y 进行光路追迹确定像方截距和像方孔径角.
2.远轴光线的光路计算
子午面内的远轴光按大L公式进行计算:
Lr sin U r n sin I ' ' sin I n U' U I I' sin I sin I ' L r r sin U '
工程光学-第6章 光线的光路计算及像差理论
第六章 光线的光路计算及像差理论
前后折射面过渡公式
′ −1 − d k ′ −1 ⎧lk = lk ⎪ ′ −1 ⎨uk = uk ⎪n = n′ k −1 ⎩ k
前后折射面校对公式
⎧h = lu = l ′u′ ⎨ ⎩nuy = n′u′y′ = J
系统焦距
′ = f ′ = h1 / u ′ l1 = ∞, u1 = 0 → lk
(1)无穷远处物体
第六章 光线的光路计算及像差理论
轴外点与轴上点的重要区别 光束相对于主光线失去了对称性
第六章 光线的光路计算及像差理论
(1)无穷远处物体 初始数据
上光线U a = U z , La = Lz + h / tan U z ⎫ ⎪ 主光线U z = ω , Lz ⎬ 下光线U b = U z , Lb = Lz − h / tan U z ⎪ ⎭
第六章 光线的光路计算及像差理论
2、目视光学系统 人眼响应波段:380~760nm 最灵敏波长:555nm 校正单色差:e光λ=546.1nm 校正色差:F光λ=486.1nm和C光λ=656.3nm 选择光学材料 nD , vD = ( nD − 1) / ( nF − nC ) 3、普通照相系统 一般照相乳胶对蓝光较灵敏,具体应根据实际照相底片参数而定 校正单色差:F光λ = 486.1nm 校正色差:D光λ=589.3nm和G′光 λ =434.1nm ′ − nD ) 选择光学材料 nF , vF = ( nF − 1) / ( nG
3、球差是入射高度和孔径角的函数(偶次)
重复轴上点远轴光线计算步骤 可得实际高
第六章 光线的光路计算及像差理论
(2)有限远处物体
初始数据
上光线 tan U a =(y - h)/(Lz - L),La = Lz + h/ tan U a ⎫ ⎪ 主光线 tan U z =y/(Lz - L),Lz ⎬ 下光线tanU b =(y + h)/(Lz - L),Lb = Lz + h/ tan U b ⎪ ⎭
工程光学第六章像差理论重点讲解
校对公式:
h lu lu nuy nuy J
最后可计算出像点位置和系统各基点位置。
焦点位置及焦距计算:l1 , u1 0
f ' h1 / u'k
2、轴外物点近轴光线光路计算(第二近轴光线)
仍用近轴光线光路计算公式和校对公式,所有量均注以下标z.
已知:物方物位、入瞳位置和物高,即 l, lz , uz 。 求解:像方物位、出瞳位置和像高,即 l, lz , uz 。
i
l
r
r
u(当l1
时, u1
0,i1
h1
/
r1)
i' n i
n'
u' u i i'
l' r(1 i' )
u'
l' n'lr
n'l n(l r)
第二节 光线的光路计算
对于有k个面的折射系统,需利用根据过渡公式:
过渡公式:
lk lk1 dk 1 uk uk 1 nk nk 1
对于小视场的光学系统,例如望远物镜和显微物镜等,只 要求校正与孔径有关的像差,所以只需计算上述第一种光线。 对大孔径、大视场的光学系统,如照相物镜等,要求校正所 有像差,所以需要计算上述三种光线。
第二节 光线的光路计算
由已知条件:
光学系统的结构参数(r,d,n)
物体的位置和大小 入瞳的位置和大小
解决问题:
第一节 概述
像差校正:
在实际光学系统中,各种像差是同时存在的,像差 影响光学系统成像的清晰度、相似性和色彩逼真度等 ,就降低了成像质量。故像差的大小反映了光学系统 质量的优劣。
除了平面镜成像以外,没有像差的光学系统是不 存在的。完全消除像、色差是不可能的,针对光学系 统的不同用途,只要把像、色差降低在某范围内,使 光接收器不能分辨,或者说这种差别只要能骗过光接 收器,就可以认为是理想的。
工程光学第六章光线光路计算及像差理论
I
U ; sin I '
n sin I n'
U '
I '; L'
L
tgU
tgU
当角U很小时,用上式计算不够精确,宜把正切改
为余弦
L L tgU
L sinU cosU L ncosU
tgU cosU sinU n cosU
2、 近轴光计算公式:
则
L ' L ' l '
即为轴向球差的大小。 当δL′=0时,称这种光学系统为消球差系统。
大孔径产生的球差
P
P• P•
L l
Lm
Lm l
L L l
L<0 负球差(凸透镜)(出射光束是会聚光束)
L >0 正球差(凹透镜)(出射光束是发散光束)
一、
1、
A
-U1
-Y
-Uz1
-L1
Lz1
入瞳
当物体位于无限远时,l1 时,
uz1 1 为已知。
2、
当U 0时,sin I h
r
轴外点初始数据为
轴外物点发出的主光线及上、下光线的初始数据为 入瞳半径可由下式确定 (Lz L)tgU
差,把像差校正到某一公差范围内,使成像质量达 到技术要求;同时了解各种像差的现象、产生原 因、光束结构、减小像差的措施。
第二节 光线的光路计算
光线光路的计算主要有三类:
子午面内的光线光路计算 轴外点沿主光线的细光束像点的计算 子午面外光线或空间光线的计算
对于小视场的光学系统,例如望远物镜和显微物 镜等,只要求校正与孔径有关的像差,所以只需计 算上述第一种光线。对大孔径、大视场的光学系统, 如照相物镜等,要求校正所有像差,所以需要计算 上述三种光线。
第六章.像差(工程光学)第二讲

k 1
SIII
(6-52)
(1)由像散分布式可知,对单个折射球面而言,没有正弦差
子午场曲:
xt'
lt'
l
'
t
'
sU
' z
x
l
'
弧矢场曲:
xs'
ls'
l'
s'
cosU
' z
x
l'
(6-44)
4、场曲的性质
★ 细光束的场曲与孔径u(或入射高度h)无关,只是视场ω (y)的函数。
★ 视场为零,则场曲为零。
5、场曲的幂级数表达式
x' t(s)
A1 y 2
A2 y4
A3 y6
(6-45)
SIV J 2 (n'n)/nn'r
J 为拉赫不变量
(6-46) (6-47) (6-48) (6-49)
二、像散
1、场曲与像散的关系
图610(b)
★ 图6-10(b)表示细光束子午场曲和弧矢场 曲的像差曲线。随着视场的增大.场曲和像 散迅速增大。这是因为场曲和像散随视场的 平方倍(初级)和四次方倍(高级)增大。
(6-40)
比较式(6-34)和(6-40),得彗差与正弦差的关系为:
OSC' Ks' / y'
(6-41)
彗差是轴外像差之一,它破坏了轴外视场成像的清晰度。
彗差值随视场的增大而增大,故对大视场的光学系统,必须校 正彗差。若光阑通过单折射面的球心,则不产生彗差。
后面将要论述,有些光学系统,不仅不产生彗差,其轴外点的
只能要求其成像光束结构与轴上点成像光束结构相同,也就是 说,轴上点和近轴点有相同的成像缺陷,称为等晕成像。欲满 足等晕成像的要求,光学系统必须满足等晕条件,即
第六章 光路计算和像差理论
6.2 光路计算
光路计算分类:
轴上点近轴光路计算(物在有限远,无限远): (物体发出,经过入瞳边缘的光线) 可以求得高斯像点、基点位置、焦距等。 近轴光路计算 轴外点近轴光路计算 (物体边缘发出,经过入瞳中心的光线): 1、子午面内光路计算 可以求得出瞳位置、理想像高等。 轴上点,一般取5个孔径: 求得实际像点的位置,对应像差; 实际光路(远轴)计算 轴外点,一般取5个视场,每个视场11个孔径: 求得实际像高,对应像差。 2、沿主光线的细光束光路计算:子午/弧矢场曲、像散 3、子午面外空间光线的光路计算:全面分析系统质量,软件设计
由于轴上点发出的光束是轴对称的,所以子午面内的球差只计算上半 部分即可,计算上部分的孔径光线为:0.3、0.5、0.707、0.85、1.0。 每一条光线对应一个球差值,如果把不同 孔径所对应的球差值全部计算出来,并且 将它们绘制成图,就称此图为球差曲线, 球差曲线非常直观的表达了系统球差的大 小,通过球差曲线可以非常形像地对球差 进行表征。
n n ' n n' t' t r n ' n n ' n s r s'
此时,像散为0
6.3
轴上点的球差
一、 球差定义及表示方法
1、沿轴球差 由实际光线的光路计算公式知,当物距L为定值时,像距L’与入射 高度h及孔径角U有关,随着孔径角的不同,像距L’是变化的,即如 图所示:轴上点A点发出的光束,对于光轴附近的光用近轴光路计算 公式,像点为A’ 0(看作高斯像点),对于实际光线采用实际光计算 公式,成像于A’ 1 (实际像)。
工程光学 第六章 光线的光路计算及像差理论
第一节 概 述
二、像差计算的谱线选择
1、目视光学系统
目视光学系统的接收器是人的眼晴。只对波长在 380—760nm范围内的波段有响应,其中最灵敏的 波长555nm,
目视光学系统:
➢一般选择靠近此灵敏波长的D光(589.3nm)或e光 (546.1nm)校正单色像差。 因e光比D光更接近于 555nm,故用e光校正单色像差更为合适,
一、正弦差
➢ 正弦差用来表示小视场时宽光束成像的不对称性 。
➢ 垂直于光轴平面内两个相邻点,
➢一个是轴上点, ➢一个是靠近光轴的轴外点,
正弦条件
➢ 其理想成像的条件是:
nsyiU n n 'y'siU n '
一、正弦差 ➢ 当光学系统满足正弦条件时, ✓若轴上点理想成像,则近轴物点也理想成像, ✓即光学系统既无球差也无正弦差, ✓这就是所谓不晕成像。
工程光学 第六章 光线的 光路计算及像差理论
第六章 光线的光路计算及像差理论
第一节 概 述 第二节 光线的光路计算 第三节 轴上点球差 第四节 正弦差和彗差 第五节 场曲和像散 第六节 畸 变 第七节 色 差
第一节 概 述
一、基本概念
(1)近轴光学系统中: ➢根据精确的球面折射公式,导出在动
sina=a,cosa=1时的物像大小和位置,即理想光学 系统的物像关系式。一个物点的理想像仍然是一个 点,从物点发出的所有光线通过光学系统后都会聚 于一点。 ➢近轴光学系统只适用于近轴的小物体以细光束成像 。
➢同一光学介质对不同的色光有不同的折射率 ➢白光进入光学系统后,由于折射率不同而有不同的
光程, ➢这样就导致了不同色光成像的大小和位置也不相同
第一节 概 述
一、基本概念
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
68
齐明点 齐明点: 不产生球差的共轭点称作不晕点或者齐明点
齐明点
齐明点
齐明点
齐明透镜的作用: 增大物镜的孔径角
齐明透镜常用 于显微物镜或 照明系统中
主光线:某视场点发出的通过入瞳中心的实际光线 第一近轴光线:轴上物点A发出的通过入瞳边缘点的 “近轴”光线 第二近轴光线:轴外某视场点发出的通过入瞳中心的 “近轴”光线 辅轴:轴外点和球心的连线称为该折射球面的辅轴
单个折射面的初级球差分布系数可写为:
S I luni(i i' )(i'u)
单个折射球面的球差分布系数为:
niLsin U (sin I sin I )(sin I sin U ) S一 1 1 1 cos ( I U ) cos ( I U ) cos ( I I ) 2 2 2
这种组合光组被称为消球差光组
球差的校正
加发散透镜消除球差
球差的校正 消球差的基本思路
采用正、负透镜组合进行正负球差补偿,实现消球差
由于球差与入射高度或孔径角的偶数次方函数,因此, 只能正对某一入射高度或孔径角度来消球差。 通常使初级球差与高级球差大小相等,符号相反,在 边缘光带处补偿球差,使球差校正为零。
一、
1、
A -Y
-U1 -Uz1
-L1
Lz1 入瞳
当物体位于无限远时,l1 时, uz1 1 为已知。
2、
h sin I 当U 0时, r
轴外点初始数据为
轴外物点发出的主光线及上、下光线的初始数据为 入瞳半径可由下式确定
( Lz L)tgU
2)近轴光:
1 l d 1 n u i 2 u i l i 2 l i l d i d i 1
Um
•
•
•
T
截距随孔径角而变化:
ir l r u
r sin I L r sin U
故轴上物点发出的光束,经光学系统后不 能相交于一点,而成弥散的圆形像斑的现象。 称为球面像差。
对应孔径角U入射光线的高度h
hmax
-Umax
h
A -U
A’
△y’
L’
δL’
对应孔径角Umax入射光线的高度hmax被称为全孔径(边 光球差)
若h/hmax=0.707,则称为0.707孔径或0.707带光(带光球差)
初级球差与高级球差相补偿的方法:
①h1或u1很小很小时,为近轴区,此时δL’=0: ②h1或u1很小,仅有初级量,只需计算一条光线,通常 为边缘光线,就可求出各级球差。 ③h1或u1有一定大小,四次项不可忽略,可得仅有初级 2 4 和二级球差时的公式
h1 h1 L ' A1 A2 hm hm
当对h=hm的边光消球差时,有A1=-A2,上式对h微分, 并令其等于零得
h1 1
2 hm
即当边光球差为零时,h1 1 2 hm ,这一带的光线称 带光,具有最大的剩余球差,其值为
L ' 0.25 A1
第二节
光线的光路计算
光线光路的计算主要有三类:
子午面内的光线光路计算
轴外点沿主光线的细光束像点的计算
子午面外光线或空间光线的计算
对于小视场的光学系统,例如望远物镜和显微物 镜等,只要求校正与孔径有关的像差,所以只需计 算上述第一种光线。对大孔径、大视场的光学系统, 如照相物镜等,要求校正所有像差,所以需要计算 上述三种光线。
令S-=0,单个球面在以下三种情况不产生球差,这些不产生 球差的共轭点称为齐明点:
n n' ( >n
)
1、L=0,此时L′=0,即不论U 多大,射向顶点的光线都从顶 点射出,不产生球差。
U
A O
1
A'
齐明点
niLsin U (sin I sin I )(sin I sin U ) S一 1 1 1 cos ( I U ) cos ( I U ) cos ( I I ) 2 2 2
-I'
n' (<n )
这一对无球差的共轭点位于球心的同一侧,都在 球心之外,只能是实物成虚像或虚物成实像。此时的 物象关系为: sin U ' sin I n ' L
sin U sin I ' n L'
这种情况表明,不管孔径角多大都不产生球差。这 对共轭点不仅能以任意宽的光束对轴上点成完善像,并 且过该点的垂轴平面与之很靠近也能以任意宽光束成完 n 2 善像。故称之为齐明点或不晕点。 ( )
2、sinI-sinI′=0,此时I=I′=0, 即L=r,物点位于球心,此 时物点发出的光均无折射的 通过球面。
n n
C A,A'
-U
齐明点
3、sinI′-sinU=0或I′=U,对应 的物点像点的位置分别为
n n L r n
n n L r n
A' A I -U C n
第六章 光线的光路计算 及像差理论
概述 光线的光路计算 轴上点的球差 正弦差和慧差 场曲和像散 畸变 色差 像差特征曲线与分析 波像差
教学要求:
内容:实际光学系统中的单色像差,复色差 球差、慧差(正弦差)、像散、场曲、畸变、 产生的原因及矫正方法,光线光路的 计算方法 要求:掌握光线光路的计算方法、各种像差的 概念。掌握像差产生的原因及矫正方法 重点:掌握像差产生的原因及矫正方法。 难点:正弦差(慧差)
④当h1或u1很大时,需要计算更多的光线。一般到三级, 须计算三条光线。
边光 0.707带光 校正后,0.85带光有 最大剩余球差
0.85带光
以δL′为横坐标,h/hm为纵坐标可 画出球差曲线,它更能清晰地反映 出系统的球差性质和球差校正情况。
只有初级球差时的球差曲线图 曲线纵坐标为0处的切线与曲线的 偏离即为系统的高级球差。
L '
a. L ' 与f’、D/f’、n、r、透镜形状有关
b. L '是h、u的函数
轴上点以单色光成像时只有球差,但轴上点以近 轴细光束所称的像是理想的,因此轴上点球差完全是 由孔径角增大引起的。因此,球差必然与孔径角U1或 入射光线高度h1的函数,有如下关系: L ' A1h12 A2h14 A3h16
像差产生的几何原因:
h
像差产生的几何原因:
• 不同孔径的入射光线,成像位置 不一样 • 不同视场的光线,成像放大倍率 不一样
像差校正的原则:
• 校正主要像差到某一公差范围,使光能接收器 察觉不到即可。
像差校正的谱线选择:
1、单色像差的校正: 选用光能接收器最灵敏的谱线
2、色差的校正: 选用光能接收器所能接收的波段范围 两边缘附近的谱线 • 同时接收器的光谱特性也直接受光源和光学系 统的材料限制,三者合理匹配
大孔径光学系统必须考虑高级球差
4. 球差的特点:
球差是入射高度h或孔径角U的函数
球差具有对称性
球差与视场角无关
5. 球差对像质的影响: 点像成为一圆形弥散斑,影响成像的清晰程度
单透镜的球差特征
一般意义来说:
单正透镜产生负球差,自身无法单独消球差 单负透镜产生正球差,自身无法单独消球差
6. 球差的校正 如果将正负透镜组合起来,能否使球差得到校正?
3.折射平面和反射平面的光路计算
子午平面
子午光线
弧矢平面 物点 光轴
Hale Waihona Puke 弧矢光线主光线 透镜
轴上点:子午面与弧矢面光线分布一样
轴外点:弧矢光线对称于子午面,子午面内光线光束的对称 性被破坏。
二、
沿轴外点主光线细光束的光路计算
沿轴外点主光线细光束的光路计算
光线经过平面时的光路计算
则
L ' L ' l '
即为轴向球差的大小。 当δL′=0时,称这种光学系统为消球差系统。
大孔径产生的球差
P
P •
Lm
L l
P •
Lm
l
(出射光束是会聚光束) L<0 负球差(凸透镜)
L L l
(出射光束是发散光束) L >0 正球差(凹透镜)
综述:
① 以前研究的都是理想像,在傍轴条件下理想成像 是能近似实现的,近轴条件要求成像光束的孔径 小和仪器的视场小 ② 对任何一个实际的光学系统而言,都需要一定的 相对孔径和视场(如显微镜 ) ③ 像差:实际像与理想象之间的偏差 ④ 光学系统设计的一项重要工作就是要校正这些像 差,把像差校正到某一公差范围内,使成像质量达 到技术要求;同时了解各种像差的现象、产生原 因、光束结构、减小像差的措施。
各光线与高斯面的高度为
' Ya' ( L'a L' )tgUa ' ' ' ' Yz ( Lz L )tgU z ' Yb' ( L'b L' )tgUb
B’b 出瞳
B’z B’a
Y’b
Y’z
Y’a
-U’a P’ -U’z -U’b
O A’o
--L’b
--L’z --L’a --L’
n I U ; sin I ' sin I n' U ' I ' ; L' L tg U tgU
2、 近轴光计算公式:
n n i u ; i ' i u n' n' u ' i ' ; l ' l u l n ' u' n