外文翻译--基于51单片机温度报警器的设计(适用于毕业论文外文翻译+中英文对照)
基于单片机的无线防盗报警系统设计大学毕业论文外文文献翻译及原文
毕业设计(论文)外文文献翻译文献、资料中文题目:基于单片机的无线防盗报警系统设计文献、资料英文题目:文献、资料来源:文献、资料发表(出版)日期:院(部):专业:班级:姓名:学号:指导教师:翻译日期: 2017.02.14毕业设计(论文)外文资料翻译学院:专业:姓名:学号:外文出处:Multimedia Technology (ICMT), (用外文写)2011 International Conference on 附件: 1.外文资料翻译译文;2.外文原文。
注:请将该封面与附件装订成册。
附件1:外文资料翻译译文基于单片机的无线防盗报警系统设计摘要:为了对盗窃,抢劫等事故进行有效的监测和预警,统一使用了AT89C51单片机控制技术和红外探测技术,这是一种已经被设计出来的无线防盗报警技术,它包括硬件和软件两部分,硬件部分主要由红外传感器,发送和接收模块,单片机,声光报警等组成;软件部分包括主程序和音乐子程序。
用C语言或汇编语言编写源程序,再用keilC51平台进行调试的翻译后,下载到单片机AT89C51芯片,这种单片机和其他元器件根据设计电路焊接在PCB板上。
通电,闭合循环控制开关,当有人闯入红外发射区域时,触发声光报警,表明满足了设计要求。
关键词:红外传感器;发射;接收;单片机;报警1 前言随着时代的不断进步,人们对环境安全提出了一个更高的要求,特别是在生活安全方面,要时常地去注意那些不速之客。
现在许多小区已经安装了智能报警系统,从而提高了小区内的安全程度。
因为红外线是一种不可见光,具有很强的保密和安全性,而且采用无线发射和接收,不需要独立的线路,因此在安全装置的使用方面有很大的优势。
2 硬件系统的设计无线防盗系统图是以单片机为基础,如图1所示。
该系统包括红外传感器、发射模块、接收模块、单片机、声光警告等。
红外传感器的主要装置是由热释电红外传感器RE200B、热释电红外开关BISS0001和一些外部基本设备连接而成。
单片机温度控制系统毕业论文中英文资料外文翻译文献
单片机温度控制系统中英文资料外文翻译文献英文原文DescriptionThe at89s52 is a low-power, high-performance CMOS 8-bit microcomputer with 4K bytes of Flash Programmable and Erasable Read Only Memory (PEROM) and 128 bytes RAM. The device is manufactured using Atmel’s h igh density nonvolatile memory technology and is compatible with the industry standard MCS-51™ instruction set and pinout. The chip combines a versatile 8-bit CPU with Flash on a monolithic chip, the Atmelat89s52 is a powerful microcomputer which provides a highly flexible and cost effective solution to many embedded control applications.Features:• Compatible with MCS-51™ Products• 4K Bytes of In-System Reprogrammable Flash Memory• Endurance: 1,000 Write/Erase Cycles• Fully Static Operation: 0 Hz to 24 MHz• Three-Level Program Memory Lock• 128 x 8-Bit Internal RAM• 32 Programmable I/O Lines• Two 16-Bit Timer/Counters• Six Interrupt Sources• Programmable Serial Channel• Low Power Idle and Power Down ModesThe at89s52 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vectortwo-level interrupt architecture, a full duplex serial port, on-chip oscillator and clock circuitry. In addition, the at89s52 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning. The Power Down Mode saves the RAM contents but freezes the oscillator disabling all other chip functions until the next hardware reset.Pin Description:VCC Supply voltage.GND Ground.Port 0Port 0 is an 8-bit open drain bidirectional I/O port. As an output port each pin can sink eight TTL inputs. When is are written to port 0 pins, the pins can be used as high impedance inputs.Port 0 may also be configured to be the multiplexed loworderaddress/data bus during accesses to external program and data memory. In this mode P0 has internal pullups.Port 0 also receives the code bytes during Flash programming, and outputs the code bytes during program verification. External pullups are required during program verification.Port 1Port 1 is an 8-bit bidirectional I/O port with internal pullups. The Port 1 output buffers can sink/source four TTL inputs. When 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2Port 2 is an 8-bit bidirectional I/O port with internal pullups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses (MOVX @ DPTR). In this application it uses strong internalpull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2 emits the contents of the P2 Special Function Register.Port 2 also receives the high-order address bits and some control signals during Flash programming and verification.Port 3Port 3 is an 8-bit bidirectional I/O port with internal pullups. The Port 3 output buffers can sink/source four TTL inputs. When 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled low will source current (IIL) because of the pullups.Port 3 also serves the functions of various special features of theat89s52 as listed below:Port 3 also receives some control signals for Flash programming andverification.RSTReset input. A high on this pin for two machine cycles while theoscillator is running resets the device.ALE/PROGAddress Latch Enable output pulse for latching the low byte of theaddress during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming.In normal operation ALE is emitted at a constant rate of 1/6 theoscillator frequency, and may be used for external timing or clockingpurposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFRlocation 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSENProgram Store Enable is the read strobe to external program memory. When the at89s52 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSENactivations are skipped during each access to external data memory.EA/VPPExternal Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset. Port pinalternate functions P3.0rxd (serial input port) P3.1txd (serial output port) P3.2^int0 (external interrupt0) P3.3^int1 (external interrupt1) P3.4t0 (timer0 external input) P3.5t1 (timer1 external input) P3.6^WR (external data memory write strobe) P3.7 ^rd (external data memory read strobe)EA should be strapped to VCC for internal program executions.This pin also receives the 12-volt programming enable voltage(VPP) during Flash programming, for parts that require 12-volt VPP.XTAL1Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2. There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.Idle ModeIn idle mode, the CPU puts itself to sleep while all the onchip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset.It should be noted that when idle is terminated by a hard ware reset, the device normally resumes program execution, from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when Idle is terminated by reset, the instruction following the one that invokes Idle should not be one that writes to a port pin or to external memory.Status of External Pins During Idle and Power Down Modesmode Program memory ALE ^psen Port0 Port1Port2Port3idle internal 1 1 data data data Data Idle External 1 1 float Data data Data Power down Internal 0 0 Data Data Data Data Power down External 0 0 float data Data data Power Down ModeIn the power down mode the oscillator is stopped, and the instructionthat invokes power down is the last instruction executed. The on-chip RAMand Special Function Registers retain their values until the power down modeis terminated. The only exit from power down is a hardware reset. Resetredefines the SFRs but does not change the on-chip RAM. The reset shouldnot be activated before VCC is restored to its normal operating level andmust be held active long enough to allow the oscillator to restart andstabilize.Program Memory Lock BitsOn the chip are three lock bits which can be left unprogrammed (U) orcan be programmed (P) to obtain the additional features listed in the tablebelow:Lock Bit Protection ModesWhen lock bit 1 is programmed, the logic level at the EA pin issampled and latched during reset. If the device is powered up without a reset,the latch initializes to a random value, and holds that value until reset isactivated. It is necessary that the latched value of EA be in agreement with the current logic level at that pin in order for the device to function properly. Programming the Flash:The at89s52 is normally shipped with the on-chip Flash memory array in the erased state (that is, contents = FFH) and ready to be programmed.The programming interface accepts either a high-voltage (12-volt) or alow-voltage (VCC) program enable signal.The low voltage programming mode provides a convenient way to program the at89s52 inside the user’s system, while the high-voltage programming mode is compatible with conventional third party Flash or EPROM programmers.The at89s52 is shipped with either the high-voltage or low-voltage programming mode enabled. The respective top-side marking and device signature codes are listed in the following table.Vpp=12v Vpp=5vTop-side mark at89s52xxxxyywwat89s52xxxx-5yywwsignature (030H)=1EH(031H)=51H(032H)=FFH (030H)=1EH (031H)=51H (032H)=05HThe at89s52 code memory array is programmed byte-bybyte in either programming mode. To program any nonblank byte in the on-chip Flash Programmable and Erasable Read Only Memory, the entire memory must be erased using the Chip Erase Mode.Programming Algorithm:Before programming the at89s52, the address, data and control signals should be set up according to the Flash programming mode table and Figures 3 and 4. To program the at89s52, take the following steps.1. Input the desired memory location on the address lines.2. Input the appropriate data byte on the data lines.3. Activate the correct combination of control signals.4. Raise EA/VPP to 12V for the high-voltage programming mode.5. Pulse ALE/PROG once to program a byte in the Flash array or the lock bits. The byte-write cycle is self-timed and typically takes no more than 1.5 ms. Repeat steps 1 through 5, changing the address and data for the entire array or until the end of the object file is reached.Data Polling: The at89s52 features Data Polling to indicate the end of a write cycle. During a write cycle, an attempted read of the last byte written will result in the complement of the written datum on PO.7. Once the write cycle has been completed, true data are valid on all outputs, and the next cycle may begin. Data Polling may begin any time after a write cycle has been initiated.Ready/Busy: The progress of byte programming can also be monitored by the RDY/BSY output signal. P3.4 is pulled low after ALE goes high during programming to indicate BUSY. P3.4 is pulled high again when programming is done to indicate READY.Program Verify: If lock bits LB1 and LB2 have not been programmed, the programmed code data can be read back via the address and data lines for verification. The lock bits cannot be verified directly. Verification of the lock bits is achieved by observing that their features are enabled.Chip Erase: T he entire Flash Programmable and Erasable Read Only Memory array is erased electrically by using the proper combination of control signals and by holding ALE/PROG low for 10 ms. The code array is written with all “1”s. The chip erase operation must be executed before the code memory can be re-programmed.Reading the Signature Bytes: The signature bytes are read by the same procedure as a normal verification of locations 030H, 031H, and 032H, except that P3.6 and P3.7 must be pulled to a logic low. The values returned are as follows.(030H) = 1EH indicates manufactured by Atmel(031H) = 51H indicates 89C51(032H) = FFH indicates 12V programming(032H) = 05H indicates 5V programmingProgramming InterfaceEvery code byte in the Flash array can be written and the entire array can be erased by using the appropriate combination of control signals. The write operation cycle is selftimed and once initiated, will automatically time itself to completion.中文翻译描述at89s52是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片内含4Kbytes的快速可擦写的只读程序存储器(PEROM)和128 bytes 的随机存取数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准MCS-51产品指令系统,片内置通用8位中央处理器(CPU)和flish存储单元,功能强大at89s52单片机可为您提供许多高性价比的应用场合,可灵活应用于各种控制领域。
基于单片机的防盗报警器的设计(英文翻译).
本科生毕业设计(翻译)专业:电子信息工程学生:指导教师:完成日期: 2013年03月日多功能智能无线报警系统摘要:利用内部资源丰富的FPGA(现场可编程门阵列),设计了一个无线报警发送系统。
它包括编码器,FSK(频移键控)调制和每个通道的控制电路,它可以减小报警系统的体积同时提高其可靠性,解调接收系统的实现基于一个应用特定程序的集成电路MC3372。
在一个单片机89C51的帮助下,地址解码器也设计在接收器中。
添加其他反干扰功能,有效地降低报警系统的错误警报率。
该系统可以安装多达128个通道的发送设备。
有某些情况下,在有突发情况时,它可以发送报警信号至主机,系统会循环显示多个突发情况所在的区域代码。
传输距离是大于4公里的开阔地带。
用户可以同时安装多个类型的传感器,例如,烟雾传感器,可燃气体传感器或防盗传感器。
实验表明,无线报警系统具有高可靠性,高抗干扰能力和低错误警报率的优势。
它可以完全满足对防火防盗需要。
关键词:通讯;报警系统;频移键控;微控制器;现场可编程门阵列一、前言无线报警系统与有线警报系统相比,具有隐蔽性和易于安装的特点。
它在复杂的地形地貌情况之间的长距离传输时特别有效。
由FPGA(现场可编程门阵列)组成,其编码模块在发送系统创建地址信号,FSK(频移键控)调制信号及每个通道的控制器信号。
用FPGA取代MSI /SSI (中等规模的综合或小规模的综合)数字电路设备,不仅提高报警系统的可靠性和干扰阻力,同时也降低了它的体积,使系统更易于安装。
由于使用7位二进制数表示地址,最多可以安装为128个收发通道。
解码器由ASIC(特定用途集成电路)和SCM(单芯片微机)在无线报警接收机系统,它可以有效地降低错误警报率。
二、发送系统原理每个基站安装一个无线发送系统,并与一个7位二进制地址标识符相对应。
一旦在任何一个基站中传感器检测到突发情况,该区域的控制信号发送至编码电路,通过编码再接入该区域的7位地址标识的接口电路,转换成FSK信号。
(完整word版)外文翻译——基于单片机的红外防盗报警系统设计
外文原文Based on infrared alarm technology security systems1 the introduction1.1 the research significance of this topic research situation at home and abroad .With the development of society and science and technology unceasing development, people's living standards been improved greatly, and to the private property protection means in the unceasing enhancement, the intelligent facilities for anti-theft puts forward new requirements. This design is to meet the need of modern residential anti-theft designed family electronic alarm system. It in previous devices based on improved greatly, because use the single-chip processor signal, not only can used for single residential area, also can be used in a large-scale residential security systems. It's the job of the performance is good, do not appear to report and misstatement phenomenon, safe and reliable.In our country, the present market condition alarm basically has triggered alarm system pressure switch electron and alarm system and pressure shading triggered alarm system, etc. Various kinds of alarm, but this several common alarm there are some shortcomings. This system USES a human pyroelectric infrared sensor in the human body detector in the flied, passive pyroelectric infrared detectors because of its low cost, easy fabrication, low cost, installation is more convenient, anti-theft performance is stable and high sensitivity, safe and reliable, has attracted broad family characteristics such as popular with the customers. And alarms installation concealment, not easily by rogue found.1.2 infrared alarm technology introduction1.2.1 nature objects of the infrared radiationThe nature of any object, as long as the temperature above absolute zero (273 ℃), constantly outward issued infrared radiation, and travel at the speed of light energy. Object radiate outward infrared radiation of energy and the object of temperature and infrared radiant wavelength. Assuming objects launching infrared radiation of peak wavelength for a few, its temperature for T, the radiation energy equals infrared radiation of peak wavelength gerben and object product temperature T. This product is a constant, namely:The higher the temperature of the objects, emit infrared radiation of the smaller peak wavelength, send out infrared radiation energy is bigger also.1.2.2.pyroelectric effectPassive infrared detector also called pyroelectric infrared detector, its main working principle is pyroelectric effect. Pyroelectric effect means if make some strong dielectric material (such as qin batio3, qin wrong acid lead P (zT), etc.) of thesurface temperature changes, then with the temperature rise or fall, material surface occurs polarization, namely on the surface of the charge will be produced change, and material surface charge lost balance and eventually charge will change withvoltage or current form output.1.2.3 pyroelectric infrared sensor basic structurePyroelectric infrared sensors from sensor detection yuan, interference filters and mosfet verifier three parts. According to the number of detecting yuan to points, pyroelectric infrared sensors have unit, double yuanhe four yuan to wait for a few kinds, for human detection of infrared sensor adopts double yuan or four yuan type structure. According to pyroelectric infrared sensor utility cent, have the following kinds: used for measuring temperature sensor, it's the job of the wavelength of (1-20) nano, Used for flame detection sensor, it's the job of the wavelength for0.435 + / - 0.15 nano, For human detection sensor, it's the job of the wavelength of 7 to 15 feet. Figure 1.2 is a double detection yuan pyroelectric infrared sensor structure schematic drawing. The sensor will two opposite polarity, special1.2.4 pyroelectric infrared detector basic principlePyroelectric infrared sensor by receiving mobile human radiation that certain wavelengths of infrared radiation, can be transformed into and human body movement speed and distance, the direction of low-frequency signals about. When pyroelectric infrared sensor by ir radiation sources of radiation, its internal sensitive materials temperatures will rise, polarization intensity is abate, surface charge reduce, usually will release this part of the charge called pyroelectric charge. Because of pyroelectric charge how many can reflect material changes of temperature, so by pyroelectric charge by circuit transformed into the output voltage can also reflect material changes in temperature, thus detect ir radiation energy changes.2 hardware system design2.1 infrared anti-theft alarm system hardware designBecause this design focuses on family guard against theft, real-time monitoring of a narrower range, so this design by simply using a passive infrared detector is enough.Therefore, infrared intelligent anti-theft alarm system, and the specific design requirements for:(1)completes to high sensitive infrared sensor design, make its can warning of what happened real-time and accurate detection.(2) automatic alarm (automatic dial-up alarm audible and visual alarm). We design the system must have the following function module:1.passive infrared detector,2.sound-light alarm,3.telephone automatic dial-up function;4.continued uninterrupted power supply,According to the system to complete functions, we adopt single chip microcomputer as the core of the system unit, electronic detection, intelligent control and telephone tong2.2 telephone automatic dial-up alarm circuit designIn order to simplify the whole system design process, we do not adopt MT880 chip dialing. Realization process is as follows:First in telephone storage inside put on domestic host cell phone numberor alarm call 110. From MCU pins p2.0 and p2.1 drawn two wiring connect relays, a pick telephone keyboard MianDiJian, another connect telephone keyboard keys, automatic weighing dial because the phone keypad scanning is similar microcontroller keypad scanning, so can make SCM give fitst p2.0 a signal, lets telephone h-f, then give the p2.1 a signal, let relay connected, automatic weighing dial the key a potential, let telephone automatic dial-up, so they could finish the system alarm function.2.3 system working principleThe whole system hardware part mainly includes six parts: MCU module; Infrared detector, Acousto-optic alarm circuit; Telephone automatic dial-up alarm circuit; Power supply circuit, Working state instructions circuit. Its system working principle for: the sensors will be detected signals to lead signal processor processing, microcontroller judgment to P1.0 mouth have pulse falling edge jumping signal immediately transferred to the acousto-optic alarm program, at this moment, the red light buzzer alarm rapid flashes, lasted 30s. In the 30s inside if someone press the switch, then eliminate alarm remove alarm. if this time no one remove alarm, the proof nobody at home in 30s system will automatically triggers telephone finish the whole system of police work project. Later, microcontroller will continue to cycle back ? sentenced2.4 system total diagramIn proteus simulation system, the system circuit by crystals circuit, sound-light alarm circuit composed. Among them, we use connect the dedication of the P1.0 simulated infrared sensors, requirement when switch when pressed by the high jump, level is low, the equivalent of, sensor detects the state of man, the telephone line with P2.0 and P2.1 derivation, here without simulation telephone circuit diagram.Figure 3.53 software system design3.1 control module design programMicrocomputer in the initial plus electric, voltage is not steady state, causing instability, at this time the SCM in commonly after power up to system with a piece of delay. Time-lapse after detecting P1 mouth microcontroller state, detection level signal whether mutations, if is then calls the police processing procedure, including automatic dialup audible and visual alarm procedures, if no changes, ChuXiang level detection continues to P1 mouth state.Figure 4.1 main program flowchart3.2 system development adopted by the programming and commissioning of the platformThis system language using assembly language preparation, so choose wave6000, he has the microcontroller program edit, compile and debugging, etc., and generate hexadecimal. Files, through: machine TOPWIN burning software writeable microcontroller program memory. The simulation software use Proteus, he is from Britain Labcenter electronics company EDA software. The circuit of the simulation is interactive, aiming at the microprocessor application, still can directly based on schematic diagram of the virtual prototype programming, and implementing software source code level of real-time debugging, if have display and output, still can see after the operation of input and output effect.4 system debugging and test4.1 software debuggingAdopt modularization program design thought, fitst debugging subroutines, then gradually superposition debugging, through Proteus simulation software debugging, proof program can realize its function.4.2 system debuggingThrough the circuit of welding, each module function commissioning. I put the hardware that occur errors adjusted, in addition, infrared that piece, because is employing redirected of pyroelectric switch modified, so in must be taping photoconductive resistance to rise, has arrived in the days and nights can alarm function. The total system commissioning, through, error meets the requirement.5 closingThis system uses a pyroelectric infrared sensor, its make simple low cost and installation are more convenient and anti-theft performance is stable and strong anti-jamming capability, high sensitivity, safe and reliable.外文翻译基于红外报警技术的防盗系统1 绪论1.1 本课题的研究现状及研究意义随着社会的不断进步和科学技术不断发展,人们生活水平得到很大的提高,对私有财产的保护手段在不断的增强,对防盗设施的智能化提出了新的要求。
单片机烟雾报警器外文翻译

Design of the Temperature Control System Based on AT89S51ABSTRACTThe principle and functions of the temperature control system based on microcontroller AT89S51 a re studied, and the temperature measurement unit consists of the 1-Wire bus digital temperature sensor DS18B20. The system can be expected to detect the preset te mperature, display time and save monitoring data. An alarm will be given by system if the temperat ure exceeds the upper and lower limit value of the temperature which can be set discretionarily and then automatic control is achieved, thus the temperature is achieved monitoring intelligently within a certain range. Basing on principle of the system, it is easy to make a variety of other non-linear control systems so long as the software design is reasonably changed. The system has bee n proved to be accurate, reliable and satisfied through field practice.KEYWORDS: AT89S51; microcontroller; DS18B20; temperatureI. INTRODUCTIONTemperature is a very important parameter in human life. In the modern society, temperature contr ol (TC) is not only used in industrial production, but also widely used in other fields. With the impro vement of the life quality, we can find the TC appliance in hotels, factories and home as well. And t he trend that TC will better serve the whole society, so it is of great significance to measure and co ntrol the temperature.Based on the AT89S51 and temperature sensor DS18B20, this system controls the condition temp erature intelligently. The temperature can be set discretionarily within a certain range. The system can show the time on LCD, and save monitoring data; and automatically control the temperature w hen the condition temperature exceeds the upper and lower limit value. By doing so it is to keep th e temperature unchanged. The system is of high anti-jamming, high control precision and flexible design; it also fits the rugged environment. It is mainly used in people's life to improve the quality of the work and life. It is also versatile, so that it can be convenient to extend the use of the system. So the design is of profound importance. The general design, hardware design and software design of the system are covered.II. SYSTEM GENERAL DESIGNThe hardware block diagram of the TC is shown in Fig. 1. The system hardware includes the micro controller, temperature detection circuit, keyboard control circuit, clock circuit, Display, alarm, drive circuit and external RAM. Based on the AT89S51, the DS18B20 will transfer the temperature signa l detected to digital signal. And the signal is sent to the microcontroller for processing. At last the te mperature value is showed on the LCD 12232F. These steps are used to achieve the temperature detection. Using the keyboard interface chip HD7279 to set the temperature value, using the micro controller to keep a certain temperature, and using the LCD to show the preset value for controlling the temperature. In addition, the clock chip DS1302 is used to show time and the externalRAM 62 64 is used to save the monitoring data. An alarm will be given by buzzer in time if the temperature exceeds the upper and lower limit value of the temperature. III. HARDWARE DESIGN A. Microc ontrollerThe AT89S51 is a low-power, high-performance CMOS 8-bit microcontroller with 4K bytes of in-system programmable Flash memory. The device is manufactured using Atmel’s high-density nonvolatile memory technology and is compatible with the industry-standard 80C51 instruction set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPU with in-system programmable Flash on a monolithic chip, the Atmel AT89S51 is a powerful microcontroller which provides a highly-flexible and cost-effective solution to many embedded control applications. Minimum system of the microcontroller is shown in Fig. 2. In order to save monitoring data, the 6264 is used as an external RAM. It is a stati c RAM chip, low-power with 8K bytes memory. B. Temperature Detection CircuitThe temperature sensor is the key part in the system. The Dallas DS18B20 is used, which support s the 1-Wire bus interface, and the ON-BOARD Patented is used internally. All the sensor parts and the converting circuit are integrated in integrated circuit like a transistor [1]. Its measure range is -55℃ ~125 ℃, and the precision between -10℃ ~85 ℃ is ±0.5℃ [2 ,3]. The temperature collected by the DS18B20 is transmitted in the 1-Wire bus way, and this highly raises the system anti-jamming and makes it fit in situ temperature measurement of the rugged environment [4].There are two power supply ways for the DS18B20. The first is external power supply: the first pin of the DS18B20 is connected to the ground; the second pin serves as signal wire and the third is c onnected to the power. The second way is parasite power supply [5]. As the parasite power supply will lead to the complexity of the hardware circuit, the difficulty of the software control and the perfo rmance degradation of the chip, etc. But the DS18B20(s) can be connected to the I/O port of the mi crocontroller in the external power supply way and it is more popular. Therefore the external power su pply is used and the second pin is connected to the pin P1.3 of the AT89S51. Actually, if there are multipoint to be detected, the DS18B20(s) can be connected to the 1-Wire bus. But when the number is over 8, there is a concern to the driving and the more complex s oftware design as well as the length of the 1-Wire bus. Normally it is no more than 50m. To achieve distant control, the system can be designed in to a wireless one to break the length limit of the 1-Wire bus [6]. C. LCD CircuitThe LCD 12232F is used, which can be used to show characters, temperature value and time, and supply a friendly display interface. The 12232F is a LCD with 8192 128×32 pixels Chinese charact er database and 128 16×8 pixels ASCII character set graphics. It mainly consists of row drive/colu mn drive and 128×32 full lattice LCD with the function of displaying graphics as well as 7.5×2 Chin ese characters. It is in a parallel or serial mode to connect to external CPU [7]. In order to economi ze the hardware resource, the 12232F should be connected to the AT89S51 in serial mode with on ly 4 output ports used.The LCD grayscale can be changed by adjusting the variable resistor connected the pin Vlcd of the LCD. CLK is used to transmit serial communication clock. SID is used to transmit serial data. CS i s used to enable control the LCD. L+ is used to control the LCD backlight power. D. Clock Circuit The Dallas DS1302 is used, which is a high performance, low-power and real-time clock chip with RAM. The DS1302 serves in the system with calendar clock and is used to mo nitor the time. The time data is read and processed by the AT89S51 and then displayed by the LC D. Also the time can be adjusted by the keyboard.The DS1302 crystal oscillator is set at 32768Hz, and the recommended compensation capacitance is 6pF. The oscillator frequency is lower, so it might be possible not to connect the capacitor, and t his would not make a big difference to the time precision. The backup power supply can be connec ted to a 3.6V rechargeable battery. E. Keyboard Control CircuitThe keyboard interface in the system is driven by the HD7279A which has a +5V single power sup ply and which is connected to the keyboard and display without using any active-device. According to the basic requirements and functions of the system, only 6 buttons are neede d. The system's functions are set by the AT89S51 receiving the entered data. In order to save the external resistor, the 1×6 keyboard is used, and the keyboard codes are defined as: 07H, 0FH, 17 H, 1FH, 27H, 2FH. The order can be read out by reading the code instruction. HD7279A is connec ted to the AT89S51 in serial mode and only 4 ports are need. As shown in Fig. 6, DIG0~DIG5 and DP are respectively the column lines and row line ports of the six keys which achieve keyboard monitoring, decoding and key codes identification. F. Alarm CircuitIn order to simplify the circuit and convenient debugging, a 5V automatic buzzer is used in the alar m circuit [8]. And this make the software programming simplified. As shown in Fig. 7, it is controlled by the PNP transistor 9012 whose base is connected to the pin P2.5 of the AT89S51. When the te mperature exceeds the upper and lower limit value, the P2.5 output low level which makes the tra nsistor be on and then an alarm is given by the buzzer.G. Drive CircuitA step motor is used as the drive device to control the temperature. The four-phase and eight-beat pulse distribution mode is used to drive motor and the simple delay program is used to handle the time interval between the pulses to obtain different rotational speed. There are two output stat es for the step motor. One: when the temperature is over the upper value, the motor rotates revers ely (to low the temperature), while when lower than the lower limit value, the motor rotates normally (to raise the temperature); besides not equals the preset value. Two: when the temperature is at s omewhere between the two ends and equals the preset value, the motor stops. These steps are u sed to achieve the temperature control. In addition, the motor speed can also be adjusted by relative buttons. As shown in Fig. 8, the code data is input through ports A11~A8 (be P2.3~P2.0) of the A T89S51 and inverted output by the inverter 74LS04. Finally it is amplified by thepower amplifier 2803A to power the motor.IV. SOFTWARE DESIGNAccording to the general design requirement and hardware circuit principle of the system, as well a s the improvement of the program readability, transferability and the convenient debugging, the sof tware design is modularized. The system flow mainly includes the following 8 steps: POST (Power-on self-test), system initiation, temperature detection, alarm handling, temperature control, clock chip DS1 302 operation, LCD and keyboard operation. The main program flow is shown in Fig. 9. Give a little analysis to the above 8 tasks, it is easy to find out that the last five tasks require the real time ope ration. But to the temperature detection it can be achieved with timer0 timing 1 second, that is to sa y temperature detection occurs per second. The system initiation includes global variable definition , RAM initiation, special function register initiation and peripheral equipment initiation. Global variab le definition mainly finishes the interface definition of external interface chip connected to the AT89 S51, and special definition of some memory units. RAM initiation mainly refers to RAM processing. For example when the system is electrified the time code will be stored in the internal unit address or the scintillation flag will be cleared. The special function register initiation includes loading the ini tial value of timer and opening the interrupt. For example, when the system is electrified the timer i s initialized. The peripheral equipment initiation refers to set the initial value of peripheral equipmen t. For example, when the system is electrified, the LCD should be initialized, the start-up display should be called, the temperature conversion command should be issued firstly and the clock chip DS1302 should also be initialized. The alarm handling is mainly the lowering and the rai sing of temperature to make the temperatureremain with the preset range. When the temperature is between the upper and the lower limit value , it goes to temperature control handling, that is to say the temperature need to be raised or lowere d according to the preset value. By doing so make the condition temperature equal to the preset va lue and hence to reach the temperature target.V. CONCLUSIONThe temperature control system has the advantages of friendly human-computer interaction interface, simple hardware, low cost, high temperature control precision (error in the range of ±1 ℃), convenience and versatility, etc. It can be widely used in the occasions with -55℃ to 125℃ range, and there is a certain practical value.。
烟雾报警器中英文对照外文翻译文献

烟雾报警器中英文对照外文翻译文献(文档含英文原文和中文翻译)译文:温度控制系统的设计摘要:研究了基于AT89S 51单片机温度控制系统的原理和功能,温度测量单元由单总线数字温度传感器DS18B 20构成。
该系统可进行温度设定,时间显示和保存监测数据。
如果温度超过任意设置的上限和下限值,系统将报警并可以和自动控制的实现,从而达到温度监测智能一定范围内。
基于系统的原理,很容易使其他各种非线性控制系统,只要软件设计合理的改变。
该系统已被证明是准确的,可靠和满意通过现场实践。
关键词:单片机;温度;温度I. 导言温度是在人类生活中非常重要的参数。
在现代社会中,温度控制(TC)不仅用于工业生产,还广泛应用于其它领域。
随着生活质量的提高,我们可以发现在酒店,工厂和家庭,以及比赛设备。
而比赛的趋势将更好地服务于整个社会,因此它具有十分重要的意义测量和控制温度。
在AT89S51单片机和温度传感器DS18B20的基础上,系统环境温度智能控制。
温度可设定在一定范围内动任意。
该系统可以显示在液晶显示屏的时间,并保存监测数据,并自动地控制温度,当环境温度超过上限和下限的值。
这样做是为了保持温度不变。
该系统具有很高的抗干扰能力,控制精度高,灵活的设计,它也非常适合这个恶劣的环境。
它主要应用于人们的生活,改善工作和生活质量。
这也是通用的,因此它可以方便地扩大使用该系统。
因此,设计具有深刻的重要性。
一般的设计,硬件设计和软件系统的设计都包括在内。
II. 系统总体设计该系统硬件包括微控制器,温度检测电路,键盘控制电路,时钟电路,显示,报警,驱动电路和外部RAM。
基于AT89S51单片机,DS18B20的将温度信号传送到数字信号的检测。
和信号发送到微控制器进行处理。
最后,温度值显示在液晶12232F。
这些步骤是用来实现温度检测。
使用键盘接口芯片HD7279在设定温度值,使用微控制器保持一定的温度,并使用液晶显示的温度控制设定值。
此外,时钟芯片DS1302用于显示时间和外部RAM6264是用来保存监测数据。
外文翻译--基于51单片机温度报警器的设计(适用于毕业论文外文翻译+中英文对照)

外文翻译--基于51单片机温度报警器的设计(适用于毕业论文外文翻译+中英文对照)XXX: Design of a Temperature Alarm Based on 51 MCUDepartment: n EngineeringMajor: Measurement and Control Technology and nClass:Student ID:Name:Supervisor:Date:A microcontroller。
also known as a single-chip computer system。
XXX its ns being integrated on a small chip。
it has most of the components needed for a complete computer system。
such as CPU。
memory。
internal and external bus systems。
and mostof them also have external storage。
At the same time。
it integrates XXX interfaces。
timers。
real-time clocks。
etc。
The most XXX integrate sound。
image。
ork。
and complex input-output systems on a single chip.XXX used in the industrial control field。
Microcontrollers XXX CPUs inside the chip。
The original design concept was to integrate a large number of peripheral devices and CPUs on a chip to make the computer system XXX's Z80 was the first processor designed according to this concept。
毕业设计论文—基于51单片机的温度报警电子时钟设计,附原程序

编号:审定成绩:重庆邮电大学毕业设计(论文)设计(论文)题目:基于51单片机的温度报警电子时钟的设计学院名称:自动化学院学生姓名:杨召专业:电气工程与自动化班级:0830905学号:2009212598指导教师:李锐答辩组负责人:填表时间:2013 年 5 月重庆邮电大学教务处制摘要基于单片机的定时和控制装置在许多行业有着广泛的应用,而电子时钟是其中最基本的,但带有温度报警的电子时钟却不多见。
在基于51单片机的温度报警电子时钟电路中,除了基本的单片机系统和外围电路外,还需要外部的控制和显示装置。
本电路主要以单片机AT89S52为核心而设计,通过单片机对信息的分析与处理,控制外围设备。
系统由复位模块、晶振模块、时钟模块、温度模块、测温模块、蜂鸣模块及显示模块共七个模块组成。
本设计以单片机AT89S52为切入点,通过使用AT89S52连接外接晶振的调节来确定一个合适的振荡周期,从而确定出内部的机器周期,通过单片机与DS1302的信息交互来设计出时钟程序,即设计出了电子时钟的核心。
然后在核心电路的基础上设计出了相应的扩展电路,使本设计更加实用。
本设计能够实现年月日和十分秒的正常显示和时间调节,也能根据需要设定闹铃,还能检测周围环境温度并送LCD1602显示,当环境温度超过设定的上限温度或者低于下限温度时蜂鸣器响起且警报灯闪烁。
【关键词】单片机1602LCD 温度检测DS1302ABSTRACTBased on single-chip timing and control device has been widely applied in many industries, and the electronic clock is one of the most basic electronic clock with temperature alarm is rare.51 microcontroller-based temperature alarm electronic clock circuit, in addition to the basic SCM system and the peripheral circuit, external control and display device. The circuit microcontroller AT89S52 as the core design, analysis and processing of information through the microcontroller to control peripheral devices. The system consists of the reset module, crystal module, clock module, module temperature, temperature measurement module, beep module and display module of seven modules.The design of single-chip AT89S52 as the starting point, through the using AT89S52 connection adjustment of the external crystal oscillator to determine an appropriate period of oscillation in order to determine the internal machine cycle design, information exchange through the MCU and the DS1302 clock program design the core of the electronic clock. Then out on the basis of the core circuit design corresponding to the expansion of the circuit, so that the design is more practical.This design can be achieved adjust the date and tenth of seconds the normal display and time, also need to set an alarm, can also detect ambient temperature and sent LCD1602 display, when the ambient temperature exceeds the set limit temperature or below the lower limit temperature when the buzzer sounds and the warning light is flashing.【Key words】Micro control unit LCD1602 Temperature detection DS1302目录前言 (1)第一章绪论 (3)第一节研究背景和意义 (3)第二节电子时钟的发展史 (4)一、电子时钟的发展史 (4)第三节单片机介绍 (4)一、单片机的发展 (4)二、单片机的组成及特点 (5)第四节本章小结 (6)第二章系统设计 (7)第一节方案设计与论证 (7)一、键盘方式论证 (7)二、显示方式论证 (7)三、计时方式论证 (7)四、测温方式论证 (8)第二节系统的硬件设计 (8)一、AT89S52简介 (9)2、AT89S52单片机硬件结构的特点 (11)二、显示部分电路的设计 (12)三、时钟模块设计 (17)四、温度电路 (19)五、蜂鸣电路 (20)六、复位模块 (21)七、按键模块 (21)第三节系统的软件设计 (22)一、系统程序框图 (22)二、各模块的子程序设计 (23)第四节本章小结 (29)第三章系统的仿真、制作与调试 (30)第一节Proteus仿真 (30)一、Proteus操作见面简介 (30)二、系统仿真电路原理图设计 (31)三、仿真结果 (32)第二节电路硬件焊接制作与调试 (34)一、电路焊接 (34)二、系统调试 (34)三、调试中遇到的问题及解决方法 (35)第三节本章小结 (38)结论 (39)致谢 (40)参考文献 (41)附录 (43)一、英文原文: (43)二、英文翻译: (54)三工程设计图纸: (63)四、源程序 (64)前言20世纪末,电子技术获得了非常快速的发展,现代电子产品几乎渗透到了社会的各个领域,家用电子就是其中之一。
精品中英文外文翻译基于单片机的汽车防盗报警系统设计定

Based on monolithic integrated circuit automobile security alarmsystem designAbstract:Decodes the automobile security system using them on litchis integrated circuit interior resources realization jump code, it each time uses the remote control password all is changing, both enhanced the system security, and greatly reduced the cost.Keyword: Monolithic integrated circuit, Automobile security system , Code/decodeIntroductionIs unceasingly progressive along with the social economy and the high tech rapid development, in the routine work and the life, the automobile has become the people ideal transportation vehicle. But the following motor vehicle the case which robbed gradually is also in creased has created the pilot economical property loss. In order tore duce the automobile to rob the event the formation rate, for has the automobile the user to provide the safety control, simply develops one kind to be reliable, the ease of operation, can send out in the discovery normal condition to the pilot reports to the police the reminder and the security warning safety system has the practical significance. This article based on to the existing automobile security alarm system generalized analysis, develops one kind of brand-new security alarm system. This system has mainly used the jump code code/decoding principle, causes the overall system to be safer, greatly reduces password explaining rate.1. System principle of workThe automobile security alarm system the remote control which carries by the driver and installs in the automobile the controller two parts composes. The remote control and the controller all use eight CMOS which American AT-MEL Corporation produces the A VR monolithic integrated circuit, this series monolithic integrated circuit based on new simplifies instruction R the ISC structure, includes the service life most to be few is 1,000 time writes/scratches the circulation the Flash program memory, as well as the service life at least is 100,000time writes/scratches the circulation E the EPROM data-carrier storage, some 2 only have when the entire piececleaning can clean the programming encryption locks the localization.1.1 System designThe automobile security examination uses the ultrasonic sensor. The ultrasonic sensor is composed by the ultrasonic wave transmission circuit and the supersonic reception electric circuit, in the automobile cab appropriate position, installs the ultrasonic wave launch/receiver, as well as switch electric circuit T1. When the automobile parks the vehicle owner person must leave the automobile, with remote control closed switch T1, the automobile alarm system sat garrisons the condition, around the system use ultrasonic wave examination vehicle obstacle. Launches the partial electric circuits likes chart 1 to show. When its P1 mouth P1.1, P1.2 to the D trig , the P1.0 control ultrasonic wave launch, are 0, the photo electricity coupler outputs the TP1 end is 1, the permission ultrasonic wave launch, launches/the receive ultrasonic wave in turn, the circulation repeatedly carries on. Simultaneously the monolithic integrated circuit interior counter starts to count. The steam distance between vehicles obstacle distance is the time which sends out through the sound navigation and ranging reflects spends determines and carries on the computation. The reflection signal causes the D trigger to produce interrupt request signal INT1,simultaneously stops counting, reads takes counts the value, calculates the actual distance after the formula, then carries on the comparison with the datum distance, if examines when the actual distance is bigger than reference value 80cm, does not carry on the accustom-optics to report to the police; If some people approach the automobile to enter the cab, the examination actual distance is smaller than or was equal to when reference value 80cm, through monolithic integrated circuit P2.2 and the P2.3 port, actuates the indicating lamp display circuit and the sound alarm circuit, sends out three two flash. And triggers a high level, the actuation is wire less signal transmission circuit.Chart 1 Ultrasonic wave transmission circuit1.2 Code/decoding principleThe present automobile remote control security system are many isusesVD5026/27, PT2262/72, HT12E/D and so on the general code/decodes the electric circuit, its password decided by the component address, each set of security systems use a fixed invariable password. Along with the micro processing technology development, through the receiver emote control transmitting message, may intercept this fixed password, moreover general arranges the decoding address to lose the person to carry the component size limit, its quantity is impossible too much, can obtain not repeatedly codes very is also limited, also can very quickly explain the password with the automatic scanner. Therefore, this kind of password fixed invariable automobile security system has received the serious threat. Decodes the automobile security system using the monolithic integrated circuit interior resources realization jump code, it each time uses the remote control password all is changing, with the password no longer duplicates uses, causes the interception password also is makes a futile effort, in addition, it may increase the enough many passwords figure, enhances the system resistance illegal scanning the ability. The remote control coding altogether has 12 bytes, separately by 3 bytes codes channels code, 3 bytes codes forewords number, 5 bytes jumps codes, 1 byte pressed key operation code is composed. Encoded front adds on logic in each byte 0 to take the outset position, encoded behind adds on a logical 1 achievement in each byte to stop the position, and in most front adds on several logic 1 to take the guidance signal, this constituted the serial coded signal which uses in to transmit. The code channel code uses in to express the remote control status; each set of systems use a fixed channel code. The code foreword number uses in to record the encoded order, its starting value is 0, the monolithic integrated circuit every time codes a time, the code foreword number upwardly counts time. The code channel code and the code foreword number deposits in monolithic integrated circuit EEPROM, guarantees them power cut the influence. The jump code is the systematic true password, it passes through the complex special algorithm by the code channel code and the code foreword number to extract, this special algorithm foreign security. The pressed key operation code by the pressed key which presses was decided, when "the hypothesis" the key is pressed down, its code decides as 0 1H; When "relieves" the key presses down, its code decides as 00H. Whether is the decoding confirms receive the code legitimate a series of operating process. Was confirmed the legitimate code needs to satisfy three conditions; (1) codes the channel code and the decoding channel code is same; (2) coded the foreword number to be bigger than the decoding foreword number (decodingforeword number to record on legitimately has used code foreword number, this condition might guarantee before has used code was invalid); (3) jumps the code to be equal to reuses the special algorithm to extract changes the code. After the monolithic integrated circuit confirmed receives is the legitimate code, writes the code foreword number in the decoding foreword number, and completes corresponding operation processing according to the operation code. The decoding channel code and the decoding foreword number also deposits in monolithic integrated circuit EEPROM, guards against because of power cut loses.1.3 Security reports to the police realizationIf will have robber Chen ZheRu the room, starts the automobile, after wrong password, then the automobile storage battery +12V voltage, the ignition electric current way ignition lock, the ignition outage, the engine extinguishes, again starts, will duplicate the above process, like this, the bandits and thieves always will not be able to start the automobile, will not be able to achieve its anticipated goal. The alarm circuit mainly is composed by the integrated block and the speaker and electronic switching SCR. Triode or the multiple-unit tube, are for enhance the electric circuit measure which the power but often uses, it has composed a current amplification factor very big equivalent transistor, total enlargement factor for these two enlargement factor product. SCR is the electronic switching which constitutes by the silicon-controlled rectifier, the electric capacity and the resistance constitution negative booster concurrently filter, provides +3 +4V to IC the voltage, IC is traces Draws up sound reports to the police the integrated circuit, the alarm apparatus by the SCR control, robs the vehicle thief once after the wrong password, then the storage battery electric current enters the security system besides a group, another group is started in the engine, after leads the engine work, natural contact output voltage, after the differentiating circuit, silicon-controlled rectifier SCR is triggered, also passes through the resistance to fall the pressure, the voltage adds in the IC power source input end, IC obtains the voltage output alarm, enlarges after the multiple-unit tube, Destroys moves the speaker to send out resoundingly reports to the police the sound. when static state, entire electric circuit does not consume the electricity.2. Software designThe alarm apparatus software design mainly divides into:Master routine (alarm apparatus initialization, key modulation and decoding); Alarm apparatus interrupthandling routine. This alarm apparatus installs on the automobile steering wheel. After installs, starts the alarm apparatus, the alarm apparatus automatically retards20~30s to start to work, in order to lets use the person to have the enough time to lock the gate to leave the automobile. After the time delay the alarm apparatus enters the value to defend the active status, once the vehicle door is turned on or the windowpane hits garrulously, the oscillation pick-up examines the signal, time delay 20s starts to report to the police. The time delay goal is the master which causes the automobile is opening the gate to enter the vehicle internal energy closure alarm apparatus, in order to avoid reports to the police by mistake.2.1 Master routineThis part mainly completes to each severance entrance hypothesis, and reports to the police the depositing unit initialization to each fixed unit, establishes the special symbol value and to the pressed key interrupts processing. Master routine design diagram like chart 2 shows.Chart2 master routine frame chart2.2 Alarm apparatus interrupt handling routineThe burglar alarm disposal procedure uses time severance inquiry processing, each time severance, only is inquires each kind of control flag bit, controls each group output according to its condition. The procedure has not used has circulation processing the way, therefore time control conclusion, cannot eliminate controls the flag bit, only is repositions the scene, the waiting next time severance, again judges whether controls the conclusion.3. Concluding remarkUses automobile security alarm system cost which this kind of monolithic integrated circuit composes low, performance reliable, simultaneously settles the extension to be convenient. The use jump code code/decoding principle, causes the system to be safer, greatly reduces password explaining rate, will obtain the wide spread application in the future automobile security alarm system.基于单片机的汽车防盗报警系统设计摘要:应用单片机内部资源实现的跳变编码/解码汽车防盗系统,它每次使用的遥控密码都在变化,既提高了系统的安全性,又大大降低了成本。
单片机温湿度控制论文英文文献(基于_C8051F)中文翻译

单片机温湿度控制论文英文文献(基于_C8051F)摘要在工业生产中,温度和湿度是常见的主要操作参数,特别是在热处理行业中,温度控制变得越来越重要。
本文即从硬件和软件这两方面介绍单片机(SCM)C8051F单片机智能温湿度控制硬件的系统,并描述示意图和软件。
该设计增加了二氧化碳的整合浓度和光强度检测和必要通信功能。
这是一个更人性化,更实用智能温湿度测量。
关键字:C8051F单片机,温度和相对环境控制; C02 浓度测量;传感器; GSM1、介绍在许多环境因素的影响,温度和湿度的因素是最重要的和最难以控逆变环境因素。
在一些工业方面,对于生产某些特殊环境要求。
此外,近年来,能源和环境问题成为人们关注的热门话题,所以节能和环保保护的想法为这个设计开辟了新的观点。
本文介绍了温度的设计湿度测量系统基于单片机,并增加了C02浓度的检测功能以及强度照明,智能人机通信功能使得该系统具有一定的人性化。
通过改变参数,将其设置为适用于一般的工业生产环境的监测。
设计更加智能化,并通过微控制器和管理人员之间的沟通,更多灵活控制,更实用和更广泛应用领域。
2、整体设计建议这样的设计主要是针对智能监控工业生产环境温度和湿度,二氧化碳浓度,光照强度以及参与其他一般环境因素。
该系统可以直接实现全自动控制,管理者也可以通过GSM通信调整控制方案模块。
其中,主机采用单片机来控制控制器的命令来完成以下工作:数据采集和测试,可以通过操作员机器接口(键盘和显示器)到实现参数设定,显示和手动介入,以及其他功能。
当参数超限或意外情况(以频率为例)出现该系统应该立即自动报警,并与经理及时以解决沟通的问题。
基于单片机的整个系统,包括数据收集和测试模块,键盘输入和显示模块,GSM和报警模块。
数据采集,检测治疗可以完成收集和放大在生产各种环境模拟参数车间,其结果将反馈到单片机,其中数据来实现的AID皈依,存储和分析,并确定是否超出设定范围所收集的数据如果它是超越,什么控制方案,然后与发送短信,及时传达给管理者。
基于C51单片机的红外温度测试仪(含外文翻译)

南京工程学院毕业设计说明书(论文)作者:崔明明学号: 202090637 院系:计算机工程学院专业:电子信息科学与技术题目:基于C51单片机的红外温度测试仪指导者:王桂珍/郑胜男高级实验师/助理实验师评阅者:王桂珍/高级实验师2013年5 月南京毕业设计说明书(论文)中文摘要毕业设计说明书(论文)英文摘要目录第一章前言 (1)1.1 课题背景及意义 (1)1.2 红外温度仪的发展现状 (1)1.3 论文的主要研究内容 (2)1.4 本章小结 (3)第二章开发平台与主要语言 (4)2.1 C51单片机简介 (4)2.2 编程语言 (9)2.3 本章小结 (10)第三章红外温度仪的系统设计 (11)3.1 红外温度计的工作原理 (11)3.2 系统规划及流程设计 (12)3.3 硬件模块的设计 (14)3.4 报警模块 (23)3.5 本章小结 (24)第四章红外温度仪的软件设计 (25)4.1 主程序模块的软件设计 (25)4.1 初始化功能模块的软件设计 (26)4.3 红外测温模块的软件设计 (27)4.4 显示模块的软件设计 (28)4.5 报警模块软件设计 (30)4.6 主程序的仿真调试 (30)4.7 本章小结 (32)第五章下载与实现 (33)5.1 硬件下载 (33)5.2 调试中解决的问题 (33)5.3 实现的结果 (35)5.4 红外温度测试仪的改进思路 (36)5.5 本章小结 (37)第六章结束语 (38)6.1 毕业设计的难点与创新 (38)6.2 收获 (38)致谢 (40)参考文献 (41)附录一:英文技术资料翻译 (42)英文原文: (42)中文译文: (47)附录二:程序清单 (52)第一章前言1.1 课题背景及意义随着现代医学和工业发展的需求,在很多情况下需要一个快速而又准确的测温仪器,而传统的温度计显然不能满足要求,比如在车站和机场的人口密度很大的情况下,快速准确测温很重要。
单片机温度控制系统外文翻译外文文献英文文献中英翻译
单片机温度控制系统外文翻译外文文献英文文献中英翻译This manuscript was revised by the office on December 10, 2020.Design of the Temperature Control System Based on AT89C51ABSTRACTThe principle and functions of the temperature control system based on micro controller AT89C51 are studied, and the temperature measurement unit consists of the 1-Wire bus digital temperature sensor DS18B20. The system can be expected to detect the preset temperature, display time and save monitoring data. An alarm will be given by system if the temperature exceeds the upperand lower limit value of the temperature which can be set discretionarily and then automatic control is achieved, thus the temperature is achievedmonitoring intelligently within a certain range. Basing on principle of the system, it is easy to make a variety of other non-linear control systems solong as the software design is reasonably changed. The system has been provedto be accurate, reliable and satisfied through field practice.KEYWORDS: AT89C51; micro controller; DS18B20; temperature1 INTRODUCTIONTemperature is a very important parameter in human life. In the modern society, temperature control (TC) is not only used in industrial production,but also widely used in other fields. With the improvement of the life quality, we can find the TC appliance in hotels, factories and home as well. And the trend that TC will better serve the whole society, so it is of great significance to measure and control the temperature. Based on the AT89C51 and temperature sensor DS18B20, this system controls the condition temperature intelligently. The temperature can be set discretionarily within a certain range. The system can show the time on LCD, and save monitoring data; andautomatically control the temperature when the condition temperature exceeds the upper and lower limit value. By doing so it is to keep the temperature unchanged. The system is of high anti-jamming, high control precision and flexible design; it also fits the rugged environment. It is mainly used in people's life to improve the quality of the work and life. It is also versatile, so that it can be convenient to extend the use of the system. So the design is of profound importance. The general design, hardware design and software design of the system are covered.IntroductionThe 8-bit AT89C51 CHMOS microcontrollers are designed to handle high-speed calculations and fast input/output operations. MCS 51 microcontrollers are typically used for high-speed event control systems. Commercial applications include modems, motor-control systems, printers, photocopiers, air conditioner control systems, disk drives, and medical instruments. The automotive industry use MCS 51 microcontrollers in engine-control systems, airbags, suspension systems, and antilock braking systems (ABS). The AT89C51 is especially well suited to applications that benefit from its processing speed and enhanced on-chip peripheral functions set, such as automotive power-train control, vehicle dynamic suspension, antilock braking, and stability control applications. Because of these critical applications, the market requires a reliable cost-effective controller with a low interrupt latency response, ability to service the high number of time and event driven integrated peripherals needed in real time applications, and a CPU with above average processing power in a single package. The financial and legal risk of having devices that operate unpredictably is very high. Once in the market, particularly in missioncritical applications such as an autopilot or anti-lock braking system, mistakes are financially prohibitive. Redesign costs can run as high as a$500K, much more if the fix means 2 back annotating it across a product family that share the same core and/or peripheral design flaw. In addition, field replacements of components is extremely expensive, as the devices aretypically sealed in modules with a total value several times that of the component. To mitigate these problems, it is essential that comprehensive testing of the controllers be carried out at both the component level and system level under worst case environmental and voltage conditions. This complete and thorough validation necessitates not only a well-defined process but also a proper environment and tools to facilitate and execute the mission successfully. Intel Chandler Platform Engineering group provides post silicon system validation (SV) of various micro-controllers and processors. The system validation process can be broken into three major parts. The type of thedevice and its application requirements determine which types of testing are performed on the device.The AT89C51 provides the following standard features4Kbytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bittimer/counters, a five vector two-level interrupt architecture, a full duple ser-ial port, on-chip oscillator and clock circuitry. In addition, the AT89C51 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt sys -tem to continue functioning. The Power-down Mode saves the RAM contents but freezes theoscil–lator disabling all other chip functions until the next hardware reset.DescriptionVCC Supply voltage.GND Ground.Port 0:Port 0 is an 8-bit open-drain bi-directional I/O port. As anoutput port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as high impedance inputs. Port 0 may also be configured to be the multiplexed low order address/data bus during accesses to external program and data memory. In this mode P0 has internal pull ups. Port 0 also receives the code bytes during Flash programming, and outputs the code bytes during program verification. External pull ups are required during program verification.Port 1:Port 1 is an 8-bit bi-directional I/O port with internal pull ups. The Port 1 output buffers can sink/so -urce four TTL inputs. When 1s are written to Port 1 pins they are pulled high by the internal pull ups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups. Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2:Port 2 is an 8-bit bi-directional I/O port with internal pull ups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins they are pulled high by the internal pull ups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pull ups. Port 2 emits the high-order address byte during fetches from external program memory and during accesses to Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pull ups. Port 2 emits the high-order address byte during fetches from external program memory and during accessesto external data memory that use 16-bit addresses (MOVX@DPTR). In this application, it uses strong internal pull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2emits the contents of the P2 Special Function Register. Port 2 also receives the high-order address bits and some control signals durin Flash programming and verification.Port 3:Port 3 is an 8-bit bi-directional I/O port with internal pull ups. The Port 3 output buffers can sink/sou -rce four TTL inputs. When 1s are written to Port 3 pins they are pulled high by the internal pull ups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled low will source current (IIL) because of the pull ups.Port 3 also serves the functions of various special features of theAT89C51 as listed below:RST:Reset input. A high on this pin for two machine cycles while the oscillator is running resets the device.ALE/PROG:Address Latch Enable output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming. In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be usedfor external timing or clocking purposes. Note, however, that one ALE pulse is skipped duri-ng each access to external Data Memory. If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSEN:Program Store Enable is the read strobe to external program memory. When theAT89C51 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activations are skipped during each access to external data memory.EA/VPP:External Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locationsstarting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset. EA should be strapped to VCC for internal program executions. This pin alsreceives the 12-volt programming enable voltage (VPP) during Flash programming, for parts that require 12-volt VPP.XTAL1:Input to the inverting oscillator amplifier and input to theinternal clock operating circuit.XTAL2 :Output from the inverting oscillator amplifier. Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure are no requirements onthe duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed. Idle ModeIn idle mode, the CPU puts itself to sleep while all the on chip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset.It should be noted that when idle is terminated by a hard ware reset, the device normally resumes program execution, from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write toa port pin when Idle is terminated by reset, the instruction following the onethat invokes Idle should not be one that writes to a port pin or to external memory.Power-down ModeIn the power-down mode, the oscillator is stopped, and the instructionthat invokes power-down is the last instruction executed. The on-chip RAM and Special Function Registers retain their values until the power-down mode is terminated. The only exit from power-down is a hardware reset. Reset redefines the SFRS but does not change the on-chip RAM. The reset should not be activated before VCC is restored to its normal operating level and must be held active long enough to allow the oscillator to restart and stabilize. The AT89C51 code memory array is programmed byte-by byte in either programming mode. To program any nonblank byte in the on-chip Flash Memory, the entire memory must be erased using the Chip Erase Mode.2 Programming AlgorithmBefore programming the AT89C51, the address, data and control signals should be set up according to the Flash programming mode table and Figure 3 and Figure 4. To program the AT89C51, take the following . Input the desired memory location on the address . Input the appropriate data byte on the data lines. 3. Activate the correct combination of control signals. 4. Raise EA/VPP to 12V for the high-voltage programming mode. 5. Pulse ALE/PROG once to program a byte in the Flash array or the lock bits. The byte-write cycle is self-timed and typically takes no more than ms. Repeat steps 1 through 5, changing the address and data for the entire array or until the end of the object file is reached. Data Polling: The AT89C51 features Data Polling to indicate the end of a write cycle. During a write cycle, an attempted read of the last byte written will result in the complement of the written datum on .Once the write cycle has been completed, true data are valid on all outputs, and the next cycle may begin. Data Polling may begin any time after a write cycle has been initiated.Busy:The progress of byte programming can also be monitored by the RDY/BSY output signal. is pulled low after ALE goes high during programming to indicate BUSY. is pulled high again when programming is done to indicate READY.Program Verify:If lock bits LB1 and LB2 have not been programmed, the programmed code data can be read back via the address and data lines for verification. The lock bits cannot be verified directly. Verification of the lock bits is achieved by observing that their features are enabled.Chip Erase:The entire Flash array is erased electrically by using the proper combination of control signals and by holding ALE/PROG low for 10 ms. The code array is written with all “1”s. The chip erase operation must be executed before the code memory can be re-programmed.Reading the Signature Bytes:The signature bytes are read by the same procedure as a normalverification of locations 030H, 031H, and 032H, except that and must be pulled to a logic low. The values returned areas follows.(030H) = 1EH indicates manufactured by Atmel(031H) = 51H indicates 89C51(032H) = FFH indicates 12V programming(032H) = 05H indicates 5V programmingProgramming InterfaceEvery code byte in the Flash array can be written and the entire array can be erased by using the appropriate combination of control signals. The write operation cycle is self timed and once initiated, will automatically timeitself to completion. A microcomputer interface converts information between two forms. Outside the microcomputer the information handled by an electronic system exists as a physical signal, but within the program, it is represented numerically. The function of any interface can be broken down into a number of operations which modify the data in some way, so that the process of conversion between the external and internal forms is carried out in a number of steps. An analog-to-digital converter(ADC) is used to convert a continuously variable signal to a corresponding digital form which can take any one of a fixed number of possible binary values. If the output of the transducer does not vary continuously, no ADC is necessary. In this case the signal conditioning section must convert the incoming signal to a form which can be connected directly to the next part of the interface, the input/output section of the microcomputer itself. Output interfaces take a similar form, the obvious difference being that here the flow of information is in the opposite direction; it is passed from the program to the outside world. Inthis case the program may call an output subroutine which supervises the operation of the interface and performs the scaling numbers which may be needed for digital-to-analog converter(DAC). This subroutine passes information in turn to an output device which produces a correspondingelectrical signal, which could be converted into analog form using a DAC. Finally the signal is conditioned(usually amplified) to a form suitable for operating an actuator. The signals used within microcomputer circuits are almost always too small to be connected directly to the outside world” and some kind of interface must be used to translate them to a more appropriate form. The design of section of interface circuits is one of the most important tasks facing the engineer wishing to apply microcomputers. We have seen thatin microcomputers information is represented as discrete patterns of bits;this digital form is most useful when the microcomputer is to be connected to equipment which can only be switched on or off, where each bit might represent the state of a switch or actuator. To solve real-world problems, a microcontroller must have more than just a CPU, a program, and a data memory. In addition, it must contain hardware allowing the CPU to access information from the outside world. Once the CPU gathers information and processes the data, it must also be able to effect change on some portion of the outside world. These hardware devices, called peripherals, are the CPU’s window to the outside.The most basic form of peripheral available on microcontrollers is the general purpose I70 port. Each of the I/O pins can be used as either an input or an output. The function of each pin is determined by setting or clearing corresponding bits in a corresponding data direction register during the initialization stage of a program. Each output pin may be driven to either a logic one or a logic zero by using CPU instructions to pin may be viewed (or read.) by the CPU using program instructions. Some type of serial unit is included on microcontrollers to allow the CPU to communicate bit-serially with external devices. Using a bit serial format instead of bit-parallel format requires fewer I/O pins to perform the communication function, which makes itless expensive, but slower. Serial transmissions are performed either synchronously or asynchronously.3 SYSTEM GENERAL DESIGNThe hardware block diagram of the TC is shown in Fig. 1. The system hardware includes the micro controller, temperature detection circuit, keyboard control circuit, clock circuit, Display, alarm, drive circuit and external RAM. Based on the AT89C51, the DS18B20 will transfer the temperature signal detected to digital signal. And the signal is sent to the micro controller for processing. At last the temperature value is showed on the LCD 12232F. These steps are used to achieve the temperature detection. Using the keyboard interface chip HD7279 to set the temperature value, using the micro controller to keep a certain temperature, and using the LCD to show the preset value for controlling the temperature. In addition, the clock chip DS1302 is used to show time and the external RAM 6264 is used to save the monitoring data. An alarm will be given by buzzer in time if the temperature exceeds the upper and lower limit value of the temperature.HARDWARE DESIGNA. Micro controllerThe AT89C51 is a low-power, high-performance CMOS 8-bit micro controller with 4K bytes of in-system programmable Flash memory. The device is manufactured using At mel’s high-density nonvolatile memory technology and is compatible with the industry-standard 80C51 instruction set and pin out. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPU with in-system programmable Flash on a monolithic chip, the At mel AT89C51 isa powerful micro controller which provides a highly-flexible and cost-effective solution to many embedded control applications. Minimum system of the micro controller is shown in Fig. 2. In order to save monitoring data, the 6264 is used as an external RAM. It is a static RAM chip, low-power with 8K bytes memory.B. Temperature Detection CircuitThe temperature sensor is the key part in the system. The Dallas DS18B20is used, which supports the 1-Wire bus interface, and the ON-BOARD Patented is used internally. All the sensor parts and the converting circuit are integrated in integrated circuit like a transistor [1]. Its measure range is -55℃~125 ℃, and the precision between -10℃~85℃is ±℃[2 ,3]. The temperature collected by the DS18B20 is transmitted in the 1-Wire bus way, and this highly raises the system anti-jamming and makes it fit in situ temperature measurement of the rugged environment [4]. There are two power supply ways for the DS18B20. The first is external power supply: the first pin of the DS18B20 is connected to the ground; the second pin serves as signal wire and the third is connected to the power. The second way is parasite power supply [5]. As the parasite power supply will lead to the complexity of the hardware circuit, the difficulty of the software control and the performance degradation of the chip, etc. But the DS18B20(s) can be connected to the I/O port of the micro controller in the external power supply way and it is more popular. Therefore the external power supply is used and the second pin is connected to the pin of the AT89S51. Actually, if there are multipoint to be detected, the DS18B20(s) can be connected to the 1-Wire bus. But when the number is over 8, there is a concern to the driving and the more complex software design as well as the length of the 1-Wire bus. Normally it is no more than 50m. To achieve distant control, the system can be designed in to a wireless one to breakthe length limit of the 1-Wire bus [6].C. LCD CircuitThe LCD 12232F is used, which can be used to show characters, temperature value and time, and supply a friendly display interface. The 12232F is a LCD with 8192 128×32 pixels Chinese character database and 128 16×8 pixels ASCII character set graphics. It mainly consists of row drive/column drive and128×32 full lattice LCD with the function of displaying graphics as well as×2 Chinese characters. It is in a parallel or serial mode to connect to external CPU [7]. In order to economize the hardware resource, the 12232F should be connected to the AT89S51 in serial mode with only 4 output ports used. The LCD grayscale can be changed by adjusting the variable resistor connected the pin Vlcd of the LCD. CLK is used to transmit serial communication clock. SID is used to transmit serial data. CS is used to enable control the LCD. L+ is used to control the LCD backlight power.D. Clock CircuitThe Dallas DS18B20 is used, which is a high performance, low-power andreal-time clock chip with RAM. The DS18B20 serves in the system with calendar clock and is used to monitor the time. The time data is read and processed by the AT89C51 and then displayed by the LCD. Also the time can be adjusted bythe keyboard. The DS18B20 crystal oscillator is set at 32768Hz, and the recommended compensation capacitance is 6pF. The oscillator frequency is lower, so it might be possible not to connect the capacitor, and this would not makea big difference to the time precision. The backup power supply can be connected to a rechargeable battery.E. Keyboard Control CircuitThe keyboard interface in the system is driven by the HD7279A which has a +5V single power supply and which is connected to the keyboard and display without using any active-device. According to the basic requirements and functions of the system, only 6 buttons are needed. The system's functions are set by the AT89C51 receiving the entered data. In order to save the external resistor, the 1×6 keyboard is used, and the keyboard codes are defined as:07H, 0FH, 17H, 1FH, 27H, 2FH. The order can be read out by reading the code instruction. HD7279A is connected to the AT89S51 in serial mode and only 4 ports are need. As shown in Fig. 6, DIG0~DIG5 and DP are respectively the column lines and row line ports of the six keys which achieve keyboard monitoring, decoding and key codes identification.F. Alarm CircuitIn order to simplify the circuit and convenient debugging, a 5V automatic buzzer is used in the alarm circuit [8]. And this make the software programming simplified. As shown in Fig. 7, it is controlled by the PNP transistor 9012 whose base is connected to the pin of the AT89C51. When the temperature exceeds the upper and lower limit value, the output low level which makes the transistor be on and then an alarm is given by the buzzer.G. Drive CircuitA step motor is used as the drive device to control the temperature. The four-phase and eight-beat pulse distribution mode is used to drive motor and the simple delay program is used to handle the time interval between the pulses to obtain different rotational speed. There are two output states for the step motor. One: when the temperature is over the upper value, the motor rotates reversely (to low the temperature), while when lower than the lower limit value, the motor rotates normally (to raise the temperature); besides not equals the preset value. Two: when the temperature is at somewhere betweenthe two ends and equals the preset value, the motor stops. These steps areused to achieve the temperature control. In addition, the motor speed can also be adjusted by relative buttons. As shown in Fig. 8, the code data is input through ports A11~A8 (be ~ of the AT89C51 and inverted output by the inverter 74LS04. Finally it is amplified by the power amplifier 2803A to power the motor.SOFTWARE DESIGNAccording to the general design requirement and hardware circuitprinciple of the system, as well as the improvement of the program readability, transferability and the convenient debugging, the software design is modularized. The system flow mainly includes the following 8 steps: POST (Power-on self-test), system initiation, temperature detection, alarm handling, temperature control, clock chip DS18B20 operation, LCD and keyboard operation. The main program flow is shown in Fig. 9. Give a little analysis to the above8 tasks, it is easy to find out that the last five tasks require the real time operation. But to the temperature detection it can be achieved with timer0 timing 1 second, that is to say temperature detection occurs per second. The system initiation includes global variable definition, RAM initiation, special function register initiation and peripheral equipment initiation. Global variable definition mainly finishes the interface definition of external interface chip connected to the AT89C51, and special definition of some memory units. RAM initiation mainly refers to RAM processing. For example when the system is electrified the time code will be stored in the internal unitaddress or the scintillation flag will be cleared. The special functionregister initiation includes loading the initial value of timer and openingthe interrupt. For example, when the system is electrified the timer is initialized. The peripheral equipment initiation refers to set the initialvalue of peripheral equipment. For example, when the system is electrified, the LCD should be initialized, the start-up display should be called, the temperature conversion command should be issued firstly and the clock chipDS18B20 should also be initialized. The alarm handling is mainly the lowering and the raising of temperature to make the temperature remain with the preset range. When the temperature is between the upper and the lower limit value, it goes to temperature control handling, that is to say the temperature need to be raised or lowered according to the preset value. By doing so make the condition temperature equal to the preset value and hence to reach the temperature target.4 CONCLUSIONThe temperature control system has the advantages of friendly human-computer interaction interface, simple hardware, low cost, high temperature control precision (error in the range of ±1 ℃), convenience and versatility, etc. It can be widely used in the occasions with -55℃to 125℃range, and there is a certain practical value.温度控制系统的设计摘要研究了基于AT89C51单片机温度控制系统的原理和功能,温度测量单元由单总线数字温度传感器DS18B20构成。
51单片机分布温度监测外文翻译

Distributed Temperature SensorAbstractWith the dearth of dedicated radiation hardened foundries, new and novel techniques are being developed for hardening designs using non-dedicated foundry services. In this paper, we will discuss the implications of validating these methods for the single event effects (SEE) in the space environment. Topics include the types of tests that are required and the design coverage (i.e., design libraries: do they need validating for each application?). Finally, an 8051 mic rocontroller core from NASA Institute of Advanced Microelectronics (IAμE) CMOS Ultra Low Power Radiation Tolerant (CULPRiT) design is evaluated for SEE mitigative techniques against two commercial 8051 devices.Keyword: Single Event Effects, Hardened-By-Design, microcontroller, radiation effects. 1.Sensor introduction1.1 Temperature sensor backgroundIn the human living environment, temperature playing an extremely important role。
温度传感器毕业论文中英文资料外文翻译文献
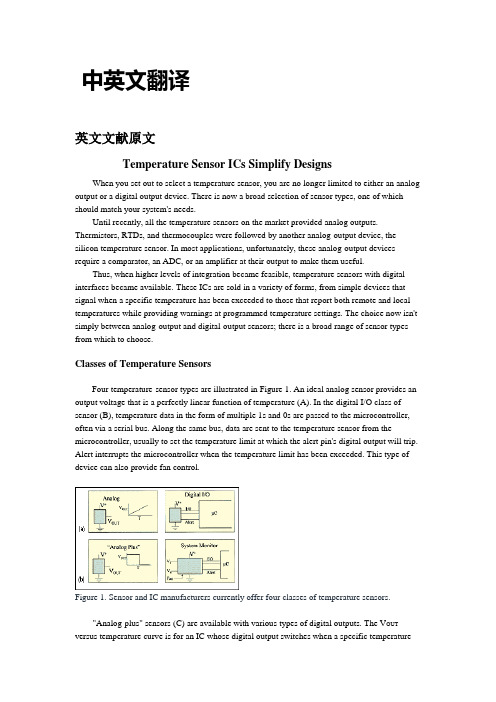
中英文翻译英文文献原文Temperature Sensor ICs Simplify DesignsWhen you set out to select a temperature sensor, you are no longer limited to either an analog output or a digital output device. There is now a broad selection of sensor types, one of which should match your system's needs.Until recently, all the temperature sensors on the market provided analog outputs. Thermistors, RTDs, and thermocouples were followed by another analog-output device, the silicon temperature sensor. In most applications, unfortunately, these analog-output devices require a comparator, an ADC, or an amplifier at their output to make them useful.Thus, when higher levels of integration became feasible, temperature sensors with digital interfaces became available. These ICs are sold in a variety of forms, from simple devices that signal when a specific temperature has been exceeded to those that report both remote and local temperatures while providing warnings at programmed temperature settings. The choice now isn't simply between analog-output and digital-output sensors; there is a broad range of sensor types from which to choose.Classes of Temperature SensorsFour temperature-sensor types are illustrated in Figure 1. An ideal analog sensor provides an output voltage that is a perfectly linear function of temperature (A). In the digital I/O class of sensor (B), temperature data in the form of multiple 1s and 0s are passed to the microcontroller, often via a serial bus. Along the same bus, data are sent to the temperature sensor from the microcontroller, usually to set the temperature limit at which the alert pin's digital output will trip. Alert interrupts the microcontroller when the temperature limit has been exceeded. This type of device can also provide fan control.Figure 1. Sensor and IC manufacturers currently offer four classes of temperature sensors."Analog-plus" sensors (C) are available with various types of digital outputs. The V OUT versus temperature curve is for an IC whose digital output switches when a specific temperaturehas been exceeded. In this case, the "plus" added to the analog temperature sensor is nothing more than a comparator and a voltage reference. Other types of "plus" parts ship temperature data in the form of the delay time after the part has been strobed, or in the form of the frequency or the period of a square wave, which will be discussed later.The system monitor (D) is the most complex IC of the four. In addition to the functions provided by the digital I/O type, this type of device commonly monitors the system supply voltages, providing an alarm when voltages rise above or sink below limits set via the I/O bus. Fan monitoring and/or control is sometimes included in this type of IC. In some cases, this class of device is used to determine whether or not a fan is working. More complex versions control the fan as a function of one or more measured temperatures. The system monitor sensor is not discussed here but is briefly mentioned to give a complete picture of the types of temperature sensors available.Analog-Output Temperature SensorsThermistors and silicon temperature sensors are widely used forms of analog-output temperature sensors. Figure 2 clearly shows that when a linear relationship between voltage and temperature is needed, a silicon temperature sensor is a far better choice than a thermistor. Over a narrow temperature range, however, thermistors can provide reasonable linearity and good sensitivity. Many circuits originally constructed with thermistors have over time been updated using silicon temperature sensors.Figure 2. The linearity of thermistors and silicon temperature sensors, two popular analog-output temperature detectors, is contrasted sharply.Silicon temperature sensors come with different output scales and offsets. Some, for example, are available with output transfer functions that are proportional to K, others to °C or °F. Some of the °C parts provide an offset so that negative temperatures can be monitored using a single-ended supply.In most applications, the output of these devices is fed into a comparator or a n A/D converter to convert the temperature data into a digital format. Despite the need for these additional devices,thermistors and silicon temperature sensors continue to enjoy popularity due to low cost and convenience of use in many situations.Digital I/O Temperature SensorsAbout five years ago, a new type of temperature sensor was introduced. These devices include a digital interface that permits communication with a microcontroller. The interface is usually an I²C or SMBus serial bus, but other serial interfaces such as SPI are common. In addition to reporting temperature readings to the microcontroller, the interface also receives instructions from the microcontroller. Those instructions are often temperature limits, which, if exceeded, activate a digital signal on the temperature sensor IC that interrupts the microcontroller. The microcontroller is then able to adjust fan speed or back off the speed of a microprocessor, for example, to keep temperature under control.This type of device is available with a wide variety of features, among them, remote temperature sensing. To enable remote sensing, most high-performance CPUs include an on-chip transistor that provides a voltage analog of the temperature. (Only one of the transistor's two p-n junctions is used.) Figure 3 shows a remote CPU being monitored using this technique. Other applications utilize a discrete transistor to perform the same function.Figure 3. A user-programmable temperature sensor monitors the temperature of a remote CPU's on-chip p-n junction.Another important feature found on some of these types of sensors (including the sensor shown in Figure 3) is the ability to interrupt a microcontroller when the measured temperature falls outside a range bounded by high and low limits. On other sensors, an interrupt is generated when the measured temperature exceeds either a high or a low temperature threshold (i.e., not both). For the sensor in Figure 3, those limits are transmitted to the temperature sensor via the SMBus interface. If the temperature moves above or below the circumscribed range, the alert signal interrupts the processor.Pictured in Figure 4 is a similar device. Instead of monitoring one p-n junction, however, it monitors four junctions and its own internal temperature. Because Maxim's MAX1668 consumes a small amount of power, its internal temperature is close to the ambient temperature. Measuring the ambient temperature gives an indication as to whether or not the system fan is operating properly.Figure 4. A user-programmable temperature sensor monitors its own local temperature and the temperatures of four remote p-n junctions.Controlling a fan while monitoring remote temperature is the chief function of the IC shown in Figure 5. Users of this part can choose between two different modes of fan control. In the PWM mode, the microcontroller controls the fan speed as a function of the measured temperature by changing the duty cycle of the signal sent to the fan. This permits the power consumption to be far less than that of the linear mode of control that this part also provides. Because some fans emit an audible sound at the frequency of the PWM signal controlling it, the linear mode can be advantageous, but at the price of higher power consumption and additional circuitry. The added power consumption is a small fraction of the power consumed by the entire system, though.Figure 5. A fan controller/temperature sensor IC uses either a PWM- or linear-mode control scheme.This IC provides the alert signal that interrupts the microcontroller when the temperature violates specified limits. A safety feature in the form of the signal called "overt" (an abbreviated version of "over temperature") is also provided. If the microcontroller or the software were to lock up while temperature is rising to a dangerous level, the alert signal would no longer be useful. However, overt, which goes active once the temperature rises above a level set via the SMBus, is typically used to control circuitry without the aid of the microcontroller. Thus, in thishigh-temperature scenario with the microcontroller not functioning, overt could be used to shutdown the system power supplies directly, without the microcontroller, and prevent a potentially catastrophic failure.This digital I/O class of devices finds widespread use in servers, battery packs, and hard-disk drives. Temperature is monitored in numerous locations to increase a server's reliability: at the motherboard (which is essentially the ambient temperature inside the chassis), inside the CPU die, and at other heat-generating components such as graphics accelerators and hard-disk drives. Battery packs incorporate temperature sensors for safety reasons and to optimize charging profiles, which maximizes battery life.There are two good reasons for monitoring the temperature of a hard-disk drive, which depends primarily on the speed of the spindle motor and the ambient temperature: The read errors in a drive increase at temperature extremes, and a hard disk's MTBF is improved significantly through temperature control. By measuring the temperature within the system, you can control motor speed to optimize reliability and performance. The drive can also be shut down. In high-end systems, alerts can be generated for the system administrator to indicate temperature extremes or situations where data loss is possible.Analog-Plus Temperature Sensors"Analog-plus" sensors are generally suited to simpler measurement applications. These ICs generate a logic output derived from the measured temperature and are distinguished from digital I/O sensors primarily because they output data on a single line, as opposed to a serial bus.In the simplest instance of an analog-plus sensor, the logic output trips when a specific temperature is exceeded. Some of these devices are tripped when temperature rises above a preset threshold, others, when temperature drops below a threshold. Some of these sensors allow the temperature threshold to be adjusted with a resistor, whereas others have fixed thresholds.The devices shown in Figure 6 are purchased with a specific internal temperature threshold. The three circuits illustrate common uses for this type of device: providing a warning, shutting down a piece of equipment, or turning on a fan.Figure 6. ICs that signal when a temperature has been exceeded are well suited forover/undertemperature alarms and simple on/off fan control.When an actual temperature reading is needed, and a microcontroller is available, sensors that transmit the reading on a single line can be useful. With the microcontroller's internal counter measuring time, the signals from this type of temperature sensor are readily transformed to a measure of temperature. The sensor in Figure 7 outputs a square wave whose frequency is proportional to the ambient temperature in Kelvin. The device in Figure 8 is similar, but the period of the square wave is proportional to the ambient temperature in kelvins.Figure 7. A temperature sensor that transmits a square wave whose frequency is proportional to the measured temperature in Kelvin forms part of a heater controller circuit.Figure 8. This temperature sensor transmits a square wave whose period is proportional to the measured temperature in Kelvin. Because only a single line is needed to send temperature information, just a single optoisolator is required to isolate the signal path.Figure 9, a truly novel approach, allows up to eight temperature sensors to be connected on this common line. The process of extracting temperature data from these sensors begins when the microcontroller's I/O port strobes all the sensors on the line simultaneously. The microcontroller is then quickly reconfigured as an input in order to receive data from each of the sensors. The data are encoded as the amount of time that transpires after the sensors are strobed. Each of the sensors encodes this time after the strobe pulse within a specific range of time. Collisions are avoided by assigning each sensor its own permissible time range.Figure 9. A microcontroller strobes up to eight temperature sensors connected on a common line and receives the temperature data transmitted from each sensor on the same line.The accuracy achieved by this method is surprisingly high: 0.8°C is typical at room temperature, precisely matching that of the IC that encodes temperature data in the form of the frequency of the transmitted square wave. The same is true of the device that uses the period of the square wave.These devices are outstanding in wire-limited applications. For example, when a temperature sensor must be isolated from the microcontroller, costs are kept to a minimum because only one optoisolator is needed. These sensors are also of great utility in automotive and HVAC applications, because they reduce the amount of copper running over distances.Anticipated Temperature Sensor DevelopmentsIC temperature sensors provide a varied array of functions and interfaces. As these devicescontinue to evolve, system designers will see more application-specific features as well as new ways of interfacing the sensors to the system. Finally, the ability of chip designers to integrate more electronics in the same die area ensures that temperature sensors will soon include new functions and special interfaces.中文翻译温度传感器芯片简化设计当选择一个温度传感器时,将不再局限于模拟输出或数字输出设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)外文翻译题目: 基于51单片机温度报警器的设计英文题目: 51 MCU-based design of a temperature alarm 系别: 信息工程系专业: ____ _测控技术与仪器_______班级: ___ _ ______学号: ____ _姓名: __ ______ __ ___________指导老师:填表日期: _______________ _单片机单片机是指一个集成在一块芯片上的完整计算机系统。
尽管他的大部分功能集成在一块小芯片上,但是它具有一个完整计算机所需要的大部分部件:CPU、内存、内部和外部总线系统,目前大部分还会具有外存。
同时集成诸如通讯接口、定时器,实时时钟等外围设备。
而现在最强大的单片机系统甚至可以将声音、图像、网络、复杂的输入输出系统集成在一块芯片上。
单片机也被称为微控制器(Microcontroller),是因为它最早被用在工业控制领域。
单片机由芯片内仅有CPU的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU集成在一个芯片中,使计算机系统更小,更容易集成进复杂的而对提及要求严格的控制设备当中。
INTEL的Z80是最早按照这种思想设计出的处理器,从此以后,单片机和专用处理器的发展便分道扬镳。
早期的单片机都是8位或4位的。
其中最成功的是INTEL的8031,因为简单可靠而性能不错获得了很大的好评。
此后在8031上发展出了MCS51系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大的提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
而传统的8位单片机的性能也得到了飞速提高,处理能力比起80年代提高了数百倍。
目前,高端的32位单片机主频已经超过300MHz,性能直追90年代中期的专用处理器,而普通的型号出厂价格跌落至1美元,最高端的型号也只有10美元。
当代单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在全系列的单片机上。
而在作为掌上电脑和手机核心处理的高端单片机甚至可以直接使用专用的Windows和Linux操作系统。
8051单片机由运算器、控制器、寄存器等组成。
运算器以完成二进制的算术/逻辑运算部件ALU为核心,再加上暂存器TMP、累加器ACC、寄存器B、程序状态标志寄存器PSW及布尔处理器。
累加器ACC是一个八位寄存器,它是CPU 中工作最频繁的寄存器。
在进行算术、逻辑运算时,累加器ACC往往在运算前暂存一个操作数(如被加数),而运算后又保存其结果(如代数和)。
寄存器B主要用于乘法和除法操作。
标志寄存器PSW也是一个八位寄存器,用来存放运算结果的一些特征,如有无进位、借位等。
其每位的具体含意如下所示。
PSW CY AC FO RS1 RS0 OV—P对用户来讲,最关心的是以下四点。
1. 进位标志CY(PSW7)。
它表示了运算是否有进位(或借位)。
如果操作结果在最高位有进位(加法)或者借位(减法),则该位为1,否则为0。
2.2. 辅助进位标志AC。
又称半进位标志,它反映了两个八位数运算低四位是否有半进位,即低四位相加(或减)有否进位(或借位),如有则AC为1状态,否则为0。
3. 溢出标志位OV。
MCS—1反映带符号数的运算结果是否有溢出,有溢出时,此位为1,否则为0。
4. 奇偶标志P。
反映累加器ACC内容的奇偶性,如果ACC中的运算结果有偶数个1(如11001100B,其中有4个1),则P为0,否则,P=1。
PSW的其它位,将在以后再介绍。
由于PSW存放程序执行中的状态,故又叫程序状态字,运算器中还有一个按位(bit)进行逻辑运算的逻辑处理机(又称布尔处理机)。
其功能在介绍位指令时再说明。
关于控制器,控制器是CPU的神经中枢,它包括定时控制逻辑电路、指令寄存器、译码器、地址指针DPTR及程序计数器PC、堆栈指针SP等。
这里程序计数器PC是由16位寄存器构成的计数器。
要单片机执行一个程序,就必须把该程序按顺序预先装入存储器ROM的某个区域。
单片机动作时应按顺序一条条取出指令来加以执行。
因此,必须有一个电路能找出指令所在的单元地址,该电路就是程序计数器PC。
当单片机开始执行程序时,给PC装入第一条指令所在地址,它每取出一条指令(如为多字节指令,则每取出一个指令字节),PC的内容就自动加1,以指向下一条指令的地址,使指令能顺序执行。
只有当程序遇到转移指令、子程序调用指令,或遇到中断时,PC才转到所需要的地方去。
8051 CPU指定的地址,从ROM相应单元中取出指令字节放在指令寄存器中寄存,然后,指令寄存器中的指令代码被译码器译成各种形式的控制信号,这些信号与单片机时钟振荡器产生的时钟脉冲在定时与控制电路中相结合,形成按一定时间节拍变化的电平和时钟,即所谓控制信息,在CPU内部协调寄存器之间的数据传输、运算等操作。
再来介绍一下存储器,存储器是单片机的又一个重要组成部分,有一种存储容量为256个单元的存储器结构。
其中每个存储单元对应一个地址,256个单元共有256个地址,用两位16进制数表示,即存储器的地址(00H~FFH)。
存储器中每个存储单元可存放一个八位二进制信息,通常用两位16进制数来表示,这就是存储器的内容。
存储器的存储单元地址和存储单元的内容是不同的两个概念,不能混淆。
单片机还包括程序存储器。
程序是控制计算机动作的一系列命令,单片机只认识由“0”和“1”代码构成的机器指令。
如前述用助记符编写的命令MOV A,#20H,换成机器认识的代码74H、20H:(写成二进制就是01110100B和00100000B)。
在单片机处理问题之前必须事先将编好的程序、表格、常数汇编成机器代码后存入单片机的存储器中,该存储器称为程序存储器。
程序存储器可以放在片内或片外,亦可片内片外同时设置。
由于PC程序计数器为16位,使得程序存储器可用16位二进制地址,因此,内外存储器的地址最大可从0000H到FFFFH。
8051内部有4k字节的ROM,就占用了由0000H~0FFFH的最低4k个字节,这时片外扩充的程序存储器地址编号应由1000H开始,如果将8051当做8031使用,不想利用片内4kROM,全用片外存储器,则地址编号仍可由0000H开始。
不过,这时应使用EA脚,保持低电平。
当EA为高电平时,用户在0000H至0FFFH 范围内使用内部ROM,大于0FFFH后,单片机CPU自动访问外部程序存储器。
单片机的数据存储器由读写存储器RAM组成。
其最大容量可扩展到64k,用于存储实时输入的数据。
8051内部有256个单元的内部数据存储器,其中00H~7FH为内部随机存储器RAM,80H~FFH为专用寄存器区。
实际使用时应首先充分利用内部存储器,从使用角度讲,搞清内部数据存储器的结构和地址分配是十分重要的。
因为将来在学习指令系统和程序设计时会经常用到它们。
8051内部数据存储器地址由00H至FFH共有256个字节的地址空间,该空间被分为两部分,其中内部数据RAM的地址为00H~7FH(即0~127)。
而用做特殊功能寄存器的地址为80H~FFH。
在此256个字节中,还开辟有一个所谓“位地址”区,该区域内不但可按字节寻址,还可按“位(bit)”寻址。
对于那些需要进行位操作的数据,可以存放到这个区域。
从00H到1FH安排了四组工作寄存器,每组占用8个RAM字节,记为R0~R7。
究竟选用那一组寄存器,由前述标志寄存器中的RS1和RS0来选用。
在这两位上放入不同的二进制数,即可选用不同的寄存器组。
特殊功能寄存器(SFR)的地址范围为80H~FFH。
在MCS-51中,除程序计数器PC和四个工作寄存器区外,其余21个特殊功能寄存器都在这SFR块中。
其中5个是双字节寄存器,它们共占用了26个字节。
各特殊功能寄存器的符号和地址。
其中带*号的可位寻址。
特殊功能寄存器反映了8051的状态,实际上是8051的状态字及控制字寄存器。
用于CPU PSW便是典型一例。
这些特殊功能寄存器大体上分为两类,一类与芯片的引脚有关,另一类作片内功能的控制用。
与芯片引脚有关的特殊功能寄存器是P0~P3,它们实际上是4个8位锁存器(每个I/O口一个),每个锁存器附加有相应的输出驱动器和输入缓冲器就构成了一个并行口。
MCS-51共有P0~P3四个这样的并行口,可提供32根I/O线,每根线都是双向的,并且大都有第二功能。
其余用于芯片控制的寄存器中,累加器A、标志寄存器PSW、数据指针DPTR等的功能前已提及。
下面再来谈论如何让单片机如何正常工作。
单片机要正常运作,事先需编制程序,再把程序放入存贮器中,然后由CPU执行该程序。
程序是由指令组成的,指令的基本组成是操作码和操作数。
单片机的品种很多,设计时怎样表示操作码和操作数,都有各自的规定,再有指令代码也各不相同,因此,必须对所选单片机的全部指令,也就是所谓“指令系统”,有足够的了解。
各个系列的单片机虽然有不同的指令系统,但也有其共同性。
掌握一种单片机的指令系统,对其它系列单片机可以起到触类旁通的作用。
MCS-51单片机应用广泛、派生品种多、具有代表性。
所以,这里以MCS-51系列的指令系统为例说明“指令”的组成和应用。
例子1,MOV A,#20H:这条指令表示把20H这个数送入累加器A中(一个特殊功能寄存器)。
例子2,ADD A,70H:这条指令表示把累加器A中的内容(在上例中送入的#20H)和存贮器中地址为70H单元中的内容(也是一个数字),通过算术逻辑单元(英文缩写为ALU)相加,并将结果保留在A中。
这里MOV、ADD 等称为操作码,而A、#20H、70H等均称为操作数。
在汇编语言程序中,操作码通常由英文单词缩写而成,这样有助于记忆,所以又称助记符。
如MOV就是英文单词MOVE的缩写,含有搬移的意思;而ADD即为英文单词,其意为相加。
因此,对于略懂英语的用户,掌握单片机指令的含意是较为方便的。
操作数有多种表示法,如以上的#20H称为立即数,即20H就是真正的操作数。
而70H是存贮器中某个单元的地址,在该单元中,放着操作数(比如说是3AH),ADDA,70H不是将70H和A中的内容相加,而是从存贮器70H单元中将3AH取出和A中的内容相加。
由上可知,要找到实际操作数,有时就要转个弯,甚至转几个弯,这个过程称为寻址4:操作数放在RAM某个单元中,该单元的地址又放在寄存器R0或R1中。
如果RAM的地址大于256,则该地址存放在16位寄存器DPTR(数据指针)中,此时在寄存器名前加@符号来表示这种间接寻址。