过程控制——三容水箱液位控制
水箱液位自动控制系统设计
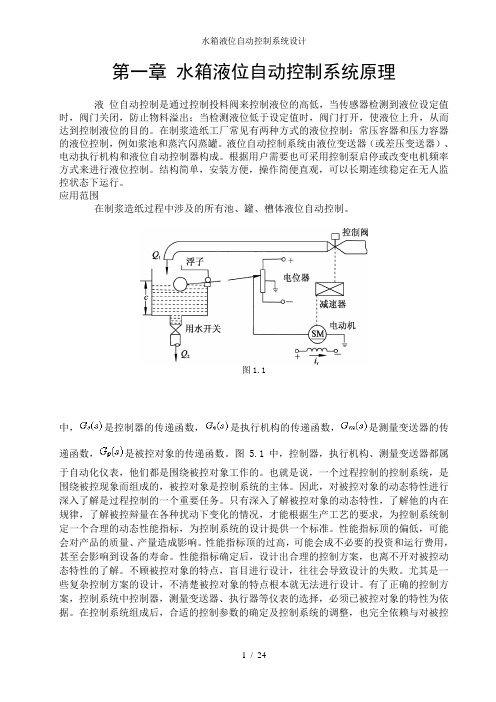
第一章水箱液位自动控制系统原理液位自动控制是通过控制投料阀来控制液位的高低,当传感器检测到液位设定值时,阀门关闭,防止物料溢出;当检测液位低于设定值时,阀门打开,使液位上升,从而达到控制液位的目的。
在制浆造纸工厂常见有两种方式的液位控制:常压容器和压力容器的液位控制,例如浆池和蒸汽闪蒸罐。
液位自动控制系统由液位变送器(或差压变送器)、电动执行机构和液位自动控制器构成。
根据用户需要也可采用控制泵启停或改变电机频率方式来进行液位控制。
结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控状态下运行。
应用范围在制浆造纸过程中涉及的所有池、罐、槽体液位自动控制。
图1.1中,是控制器的传递函数,是执行机构的传递函数,是测量变送器的传递函数,是被控对象的传递函数。
图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。
也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。
因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。
只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。
性能指标顶的偏低,可能会对产品的质量、产量造成影响。
性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。
性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。
不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。
尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。
有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。
在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。
由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。
(完整word版)三容水箱液位控制系统的PID
目录目录 (1)摘要 (3)第一章概论 (5)1.1 课题来源 (5)1.2 水箱控制策略的研究 (5)1。
3 本文研究课题 (6)第二章三容水箱系统简介及数学模型 (7)2。
1 三容水箱系统的总体结构及工作原理 (7)2。
1。
1 三容水箱试验系统的总体结构 (7)2。
1。
2 三容水箱试验台控制结构的组成 (8)2.1。
3 单入单出一阶对象的结构 (9)2.2 三容水箱系统的特点 (10)2。
3 实验建模法推导三容水箱系统的数学模型 (10)2。
4 系统的性能分析 (12)2。
5 本章小结 (15)第三章基于三容水箱系统的PID控制算法研究 (15)3。
1 PID控制原理简介 (15)3。
2 基于Z—N的算法实现 (17)3。
2。
1 数字PID控制算法简介 (17)3。
2。
2 积分分离PID控制算法 (18)3。
2.3 基于Z—N整定法的Kp、Ki、Kd控制参数整定 (20)3.3 基于遗传算法的PID控制的设计 (23)3。
3.1 遗传算法简介 (23)3。
3.2 基于遗传算法PID参数整定的算法设计 (25)3。
4 适应度目标函数讨论 (31)3。
5 基于自适应遗传算法改进的PID参数整定 (32)3.5.1 自适应遗传算法 (32)3。
5。
2 基于自适应遗传算法求解最优化模型 (34)3.6 基于自适应遗传算法的改进 (36)3.7 本章小结 (38)第四章总结 (38)4.1 结论 (38)4.2 后续工作 (39)参考文献 (39)致谢 (40)附录1 常规遗传算法PID整定程序 (41)附录2 计算目标函数值的子程序chap5-3f.m (48)附录3 基于自适应遗传算法的PID整定程序 (50)附录4 快速仿真曲线程序 (56)摘要我们知道三容水箱系统是工业过程控制中许多被控对象的典型抽象模型,在非线性、大惯性过程控制研究应用中具有广泛代表性.近年来国内外许多学者对三容水箱系统的建模方法、控制算法及故障诊断等方面进行了探讨。
三容水箱液位控制
三容水箱液位过程控制设计专业:自动化班级:2011级4班组员:孙健组员:姜悦2组员:黄潇20115041指导老师:陈刚重庆大学自动化学院2015年1月目录一、现代工业背景 (1)二、问题的提出 (2)三、模型的建立 (3)3.1 单容水箱的数学模型 (3)3.2 双容水箱的数学模型 (5)3.3 三容水箱模型 (6)四、算法的描述 (8)4.1对原始模型的仿真 (8)4.2添加P控制并对其仿真 (9)4.3添加单回路控制并对其仿真 (10)4.4添加PID控制和单回路控制并对其仿真 (11)五、结果及分析 (14)六、总结与体会 (15)6.1 组长孙健的总结 (15)6.2 组员姜悦的总结 (15)6.3 组员黄潇的总结 (15)七、参考文献 (17)八、附录 (18)一、现代工业背景世界上任何国家的经济发展,都伴随着人民生活水平的改善和城市化进程的不断加快。
但是相应的淡水资源的需求和消耗也在不断增多。
水,作为一种必不可少的资源,长期以来一直被认为是取之不尽、用之不竭的。
在这种观点的驱使下,水环境的质量越来越恶劣、水资源短缺也越来越严重,这一切都加重了城市的负荷,带来一系列危及城市生存与发展的生态环境问题。
污水也是造成环境污染的来源之一。
这个污染源的出现引起了世界各国政府的关注,治理水污染环境的课题被列入世界环保组织的工作日程。
建设污水处理厂,消除水污染也是为人民造福的一项事业,政府一时又拿不出巨大的资金投入到治理项目的建设中去。
为了使污染快速得到控制,向公民投放建设专项债券,给公民一定的高于银行存款利息的待遇,使公民的资金投入到基础设施建设,发挥这部分资金的作用,也能为政府解除一些资金筹措的忧虑,又体现了全民的环保意识。
现代污水处理技术,按处理程度划分,可分为一级、二级和三级处理。
一级处理,主要去除污水中呈悬浮状态的固体污染物质,物理处理法大部分只能完成一级处理的要求。
经过一级处理的污水,BOD一般可去除30%左右,达不到排放标准。
水箱液位控制设计

WOrd文档下载后可任意复制编辑基于水箱液位控制设计摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应, 饮料、食品加工, 溶液过滤, 化工生产等多种行业的生产加工过程, 通常需要使用蓄液池, 蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
PID 控制(比例、积分和微分控制)是目前采用最多的控制方法。
本文主要是对一水箱液位控制系统的设计过程,涉及到液位的动态控制、控制系统的建模、PID 算法、传感器和调节阀等一系列的知识。
作为单容水箱液位的控制系统,其模型为一阶惯性函数,控制方式采用了PID 算法,调节阀为电动调节阀。
选用合适的器件设备、控制方案和算法,是为了能最大限度地满足系统对诸如控制精度、调节时间和超调量等控制品质的要求。
关键词PID 控制过程控制液位控制Abstract:In people's life and in the fields of industrial production level and flow control problem, for example, the living water supply, beverage, food processing, filter solution, the production of a variety of industries such as chemical production process, often need to use the liquid storage pool, liquid storage pool level need to maintain the appropriate height, neither too overflow cause waste, also cannot too little and can't meet the demand. So the liquid level height is an important parameter in the process of industrial control, especially in dynamic state, the suitable methods of liquid level detection, control, can get very good effect. PID (proportion, integral and differential control) is currently the most control methods.This paper is the design process of a water tank liquid level control system, involves the dynamic liquid level control, the control system modeling, the PID algorithm, sensor and the regulator and a series of knowledge. As single let water tank liquid level control system, the model of first-order inertia function, control mode adopted PID algorithm, theregulator for electric regulator. Choose the right components, equipment,control scheme and algorithm in order to maximize satisfy system such as control precision and adjust the volume of time and overshoot control quality requirements.Key words:PID control process control level control1 绪论1.1 过程控制的定义生产过程自动化,一般是指石油、化工、冶金、炼焦、造纸、建材、陶瓷及电力发电等工业生产中连续的或按一定程序进行的生产过程的自动控制。
水箱液位控制系统(二)正文部分
水箱液位控制系统(二)正文部分前言自古以来,水就在人们的日常生活中扮演了重要的角色。
水是生命的源泉、农业的命脉、工业的血液!一旦断了水,轻则给人民生活带来极大的不便,重则可能造成严重的生产事故及损失。
因此给水工程往往成为高层建筑或工矿企业中最重要的基础设施之一。
任何时候都能提供足够的水量、平稳的水压、合格的水质是对给水系统提出的基本要求。
就目前而言,多数工业、生活供水系统都采用水塔、层顶水箱等作为基本储水设备,由一级或二级水泵从地下市政水管补给。
因此,如何建立一个可靠安全、又易于维护的给水系统是值得我们研究的课题。
在工农业生产以及日常生活应用中,常常会需要对容器中的液位(水位)进行自动控制。
比如自动控制水箱、水池、水槽、锅炉等容器中的蓄水量,生活中抽水马桶的自动补水控制、自动电热水器、电开水机的自动进水控制等。
虽然各种水位控制的技术要求不同,精度不同。
但其原理都大同小异。
特别是在实际操作系统中,稳定、可靠是控制系统的基本要求。
因此如何设计一个精度高、稳定性好的水位控制系统就显得日益重要。
水箱液位控制系统是进行控制理论与控制工程教学、实验和研究的平台,可以方便地构成一阶系统对象(双容水箱)和两阶系统对象(三容水箱)。
用户可通过经典的PID控制器设计与调试,进行智能控制教学实验与研究。
各种控制器的控制效果通过水位的变化直观地反映出来,同时通过液位传感器对水位的精确检测,方便地获得瞬态响应指标,准确评估控制性能。
开放的控制器平台,便于用户进行自己的控制器设计,满足创新研究的需要。
这种系统不仅适用于工业用水的控制,也适用于日常生活和农业生产上的液位控制。
1 系统结构原理1.1自动控制系统的组成(1)自动控制系统是由被控对象和控制装置组成的一个有机总体。
被控对象的输出量即被控量是要求严格加以控制的物理量;而控制装置则是对被控对象施加控制作用的机构的总体,它可以采用不同原理和方式对被控对象进行控制,但最基本的一种是基于反馈控制原理组成的反馈控制系统。
三容水箱液位控制系统的建模与仿真

过程控制课程设计三容水箱液位控制系统的建模与仿真专业:自动化班级:---------组员:-----指导老师:-------重庆大学自动化学院2013年10 月5 心得体............................................................................................................................. 1..5 ............1..5 .........1..1 两种三容水箱的工作原理 ............................................ 1.. 1.1 三容水箱的结构 ............................................... 1.. 1.2 三容水箱系统的特点 ........................................... 2.. 2 两种三容水箱的理论建模 ............................................ 3.. 2.1 假设及相关参数定义 ........................................... 3.. 2.2 执行器(阀门)的数学模型 ..................................... 4.. 2.3 阶梯式三容水箱的数学模型 ..................................... 4.. 2.4 水平式三容水箱的数学模型 .................................... 6..3 两种三容水箱模型的控制与仿真 ..................................... 8..3.1 阶梯式三容水箱的简单PID 控制 ................ ......................................... 8.. 3.2阶梯式三容水箱的串级 PID 控制 ................ ....................................... 1..0.. 3.3水平式三容水箱的简单PID 控制 ................ ....................................... 1..1..3.4 水平式三容水箱串级PID 控制 .................. ...................................... 1..3...4 总结...................................... 1..4...5.1 顾振博心得体会目录5.2 陈冶心得体会................................................. 1..5 ..........参考文.................................................................................................................................. 1..6 ............ 附 .......................................................................................................................................... 1..6 .............所用参数及其数.............................................................................................................. 1..6 ......... 5.3 谢海龙心得体会............................................... 1..5 ..........三容水箱是工业过程中许多被控对象的典型抽象模型,在非线性、大惯性过程控制研究应用中具有广泛代表性。
过程控制系统课程设计题目

(一)采用 MATLAB 仿真;所有仿真,都需要做出以下结果:( 1 ) 超调量( 2 ) 峰值时间( 3 ) 过渡过程时间(4) 余差( 5 ) 第一个波峰值( 6 ) 第二个波峰值( 7 ) 衰减比( 8 ) 衰减率( 9 ) 振荡频率( 10 ) 全部 P 、I 、 D 的参数( 11 ) PID 的模型(二)每人一个题目,自己完成课程设计报告,报告的格式如图论文格式一. 液氨的水温控制系统设计液氨蒸发器主、副对象的传递函数分别为:G (s) = 1 ,G (s) = 1 e 一0.1s 01 (20s +1)(30s +1) 02 0.2s +1主、副扰动通道的传递函数分别为:G (s) = 1 ,G (s) = 1 f 1 0.2s +1 f 2试分别采用单回路控制和串级控制设计温度控制系统,具体要求如下:( 1 ) 分别进行控制方案设计,包括调节阀的选择、控制器参数整定,给出相应的闭环系统原理图;( 2 ) 进行仿真实验,分别给出系统的跟踪性能和抗干扰性能(包括一次扰动和二次扰动);( 3 ) 说明不同控制方案对系统的影响。
二.炉温控制系统设计设计任务:某加热炉的数学模型为G(s) = e一150s ,试设计大时延控制系统,具体要求如下:( 1 ) 仿真分析以下控制方案对系统性能的影响: PID 、微分先行、中间微分、Smith 预估、增益自适应预估;给出相应的闭环控制系统原理图;( 2 ) 在不同控制方式下进行仿真实验,比较系统的跟踪性能和抗干扰性能;选择一种较为理想的控制方案进行设计,包括调节阀的选择、控制器参数整定。
三.锅炉夹套与被加热介质的温度控制1.设计任务(可 2 人选此题)了解、熟悉锅炉夹套与内胆温度控制系统的工艺流程和生产过程的静态、动态特性,根据生产过程对控制系统所提出的安全性、经济性和稳定性要求,结合所学知识实现温度的控制。
2.设计要求( 1 ) 从组成、工作原理上对工业型传感器、执行机构有一定的了解和认识。
过程控制系统实验指导书02
《过程控制系统》实验指导书目录第一章实验装置说明 (1)第二章实验要求及安全操作规程 (4)实验一单容自衡水箱液位特性测试 (5)实验二双容水箱特性的测试 (9)实验三单容水箱液位定值控制系统 (12)实验四单闭环流量定值控制系统 (15)实验五锅炉内胆水温定值控制系统 (17)实验六锅炉内胆水温位式控制系统 (19)第一章实验装置说明实验对象总貌图如图1-1所示:图1-1 实验对象总貌图本实验装置对象主要由水箱、锅炉和盘管三大部分组成。
供水系统有两路:一路由三相(380V恒压供水)磁力驱动泵、电动调节阀、直流电磁阀、涡轮流量计及手动调节阀组成;另一路由变频器、三相磁力驱动泵(220V变频调速)、涡轮流量计及手动调节阀组成。
一、被控对象由不锈钢储水箱、(上、中、下)三个串接有机玻璃水箱、4.5KW三相电加热模拟锅炉(由不锈钢锅炉内胆加温筒和封闭式锅炉夹套构成)、盘管和敷塑不锈钢管道等组成。
1.水箱:包括上水箱、中水箱、下水箱和储水箱。
上、中、下水箱采用淡蓝色优质有机玻璃,不但坚实耐用,而且透明度高,便于学生直接观察液位的变化和记录结果。
上、中水箱尺寸均为:D=25cm,H=20cm;下水箱尺寸为:D=35cm,H=20cm。
水箱结构独特,由三个槽组成,分别为缓冲槽、工作槽和出水槽,进水时水管的水先流入缓冲槽,出水时工作槽的水经过带燕尾槽的隔板流入出水槽,这样经过缓冲和线性化的处理,工作槽的液位较为稳定,便于观察。
水箱底部均接有扩散硅压力传感器与变送器,可对水箱的压力和液位进行检测和变送。
上、中、下水箱可以组合成一阶、二阶、三阶单回路液位控制系统和双闭环、三闭环液位串级控制系统。
储水箱由不锈钢板制成,尺寸为:长×宽×高=68cm×52㎝×43㎝,完全能满足上、中、下水箱的实验供水需要。
储水箱内部有两个椭圆形塑料过滤网罩,以防杂物进入水泵和管道。
2.模拟锅炉:是利用电加热管加热的常压锅炉,包括加热层(锅炉内胆)和冷却层(锅炉夹套),均由不锈钢精制而成,可利用它进行温度实验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9
6、
参考文献
【1】 刘金琨,先进PID控制及其MATLAB仿真,电子工业出版社,2003年01月 【2】 孙斌,宁锐,单神经元自适应炉温控制系统设计与仿真,2001年12月 【3】 方康玲.过程控制系统[M].武汉:武汉理工大学大学出版社,2002 【4】 何衍庆,俞金寿,蒋慰孙.工业生产过程控制[M].北京化学工业出版社,2004 【5】 沈永福,吴少军,智能PID 控制综述,2002年06月 【6】 韦巍, 智能控制技术,机械工业出版社,2003年01月 【7】刘淑荣,袁铮,高俊明,水箱液面模糊控制及Matlab仿真实现,控制系统【J】, 2005 【8】李国勇,智能控制及其MATLAB实现【M】,电子工业出版社
3
图 2.1 PID 控制系统原理图
简单说来,PID 控制器个校正环节的作用如下: (1) 比例环节:成比例地反映控制系统的偏差信号 error(t),偏差一旦产生, 控制器立即产生控制作用,以减少偏差。 (2) 积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于 积分时间常数 T1,T1 越大,积分作用越弱,反之则越强。 (3) 微分环节:反映偏差信号的变化趋势(变化速率) ,并能在偏差信号变得太 大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节 时间。 从时间的角度讲,比例作用是针对系统当前偏差进行控制,积分作用则针对系统偏 差的历史,而微分作用则反映了系统偏差的变化趋势,这三者的组合是“过去、现在、 未来”的完美结合。
【关键词】三容水箱;建模;串级控制;仿真
0、
引言
液位是工业过程中的常见参数,具有便于直接观察、容易测量和过程时间常数一般
比较小的特点。所以,以液位过程构成实验系统,可灵活地进行过程组态和实施各种不 同的控制方案。 三容水箱控制系统是基于工业过程的物理模拟对象,它是集自动化仪表技术、计算 机技术、通讯技术、自动控制技术为一体的多功能实验装置。根据自动化及其它相关专 业教学的特点,吸收了国内外同类实验装置的特点和长处后,经过精心设计,多次实验 和反复论证,推出了这一套全新的实验装置。该系统包括流量、液位、压力等参数,可 实现系统参数辨识、单回路控制、串级控制、前馈一反馈控制、比值控制、解耦控制等 多种控制形式。 三容水箱是较为典型的非线性、时延对象,工业上许多被控对象的整体或局部都可 以抽象成三容水箱的数学模型,具有很强的代表性,有较强的工业背景,对三容水箱数 学模型的建立是非常有意义的。同时,三容水箱的数学建模以及控制策略的研究对工业 生产中液位控制系统的研究有指导意义,例如工业锅炉、结晶器液位控制。而且,三容 水箱的控制可以作为研究更为复杂的非线性系统的基础,又具有较强的理论性,属于应 用基础研究。同时,它具有较强的综合性,涉及控制原理、智能控制、流体力学等多个 学科。通过水箱液位的控制系统实验,用户除可以掌握控制理论、计算机、仪器仪表知 识和现代控制技术之外,还可以熟悉生产过程的工艺流程,从控制的角度理解它的静态 和动态工作特性。
4
一高度上;反之,液位会下降,并最终稳定在另一高度上。由于水箱的流入量可以调节, 流出量随液位高度的变化而变化, 所以只需建立流入量与液位高度之间的数学关系就可 以建立该水箱对象的数学模型。
3.2 三容水箱的一般数学模型
三容水箱液位对象的模型如图3.1所示,根据动态物料平衡关系,单位时间内进入 被控过程的物料减去单位时间内从被控过程流出的物料等于被控过程内物料存储量的 变化率[3-4]。被控参数h3 的动态方程可由下面几个关系式导出:
3、
三容水箱的数学建模
3.1设计要求
现要设计控制系统控制下水箱内液位高度保持与设定值一致, 对上水箱和中水箱中 的液位高度无特殊要求,即上中两个水箱控制下水箱。 三容水箱是液位控制系统中的被控对象, 若流入量和流出量相同, 水箱的液位不变, 平衡后当流入侧阀门开大时,流入量大于流出量导致液位上升。同时由于出水压力的增 大使流出量逐渐增大,其趋势是重新建立起流入量与流出量之间的平衡关系,即液位上 升到一定高度使流出量增大到与流入量相等而重新建立起平衡关系, 液位最后稳定在某
1
1、
三容水箱液位控制系统简介
1.1三容水箱原理框图
三容水箱液位控制系统组成如图2.1所示,它包含电控箱、水箱本体及由AD/DA数 据采集卡和普通Pc机组成的控制实验平台三大部分。其原理框图如图1.1所示。
图1.1三容水箱液位控制系统总体结构图
1.2水箱本体组成
主要由以下几个部分组成: 1)水箱底座 2)磁力驱动泵 3)比例电磁阀 4)液位传感器 5)三个圆柱型水箱 电控箱内安装有如下主要部件: 1)电磁阀控制器
400000.8s 2 1200.3s 1.782 18006来自397 s 2 380.7 s
8
图 4.3 使用 PID 调节最终效果
5、
结束语
三容水箱是较为典型的非线性、时延对象,工业上许多被控对象的整体或局部都可
以抽象成三容水箱的数学模型,具有很强的代表性和工业背景。三容水箱的数学建模以 及控制策略的研究对工业生产中液位控制系统的研究有积极的指导作用, 为研究更加复 杂的系统奠定了基础。 本文以通过阻力板来调节非线性特性的三容水箱为研究对象,在机理分析的基础 上,建立了三容水箱的数学模型;结合三容水箱的特点,研究了变参数PID 控制,仿真 验证了控制算法的有效性和正确性。本文的主要工作总结如下: (1) 分析了三容水箱的硬件结构及工作原理; 通过机理建模方法建立三容水箱的一 般数学模型。 (2) 分析了PID的原理,采用参数PID 控制器。 (3) 在Matlab/Simulink 环境下建立三容水箱控制的仿真模型,采用变参数PID控 制进行仿真研究。 但还有些不足,控制算法需要改进。在现有算法的基础上改善控制效果。最后,还 要在这里感谢汪老师和同学们,在你们得人帮助及指导下,才能完成本设计。
5
图3.1 三容水箱液位对象
由此可以推导出三容水箱的控制方框图,如图 3.2 所示。
图 3.2 三容水箱的控制方框图
以上就是三容水箱数学模型的建立。
4、
算法描述
4.1算法选择
在过程控制中,液位控制一般采用 P 调节足够。但是,在本项目中,三个水箱(三
6
个一阶惯性环节)依次串联,构成三阶系统,如果只使用 P 调节,存在动态响应速度慢、 有稳态误差,因而不满足题设中对 h3 进行精确控制的要求。为消除稳态误差,要采用 PI 调节,兼顾响应时间,因此算法选择 PID。 另外,还有一个必须注意的地方:在对 h3 进行控制的同时,h1、h2 也要得到有效 的调节。尤其是容器都有高度限制,因此,h1、h2 动态响应不能有过大的超调量。否则, 流体会溢出容器,不符合实际情况,达不到对 h3 调节效果。为对 h1、h2 进行有效控制, 我们将尝试采用多回路串级调节。其中,内环调节的目的是控制 h1、h2 响应更快,超 调量更小,从而使提高对 h3 的控制效果。 因此,我们的控制方案是串级控制:对于控制精度要求不高的内环,采用 P 调节或 超前校正以提高响应速度;对于品质要求高的外环,采用 PID 或者 PI 调节,消除静差, 减小调节时间。
示, 到目前为止大多数(有资料表明90 %以上[1])工业控制回路仍然采用了各种形式的 PID 控制算法。 PID 控制是一种基于数学模型的方法, 尤其适用于建立精确数学模型的 确定性控制系统, 比例(P)、积分(I)、微分(D)三者作用配合得当, 可使动态过程快速、 平稳、准确[2] ,同时PID 控制算法简单、适应性强、灵活性好、可靠性高。 自从计算机进入控制领域以来, 用数字计算机代替模拟计算机调节器组成计算机控 制系统, 不仅可以用软件实现 PID 控制算法, 而且还可以利用计算机的逻辑功能, 使 PID 控制更加灵活。数字 PID 控制在生产过程中是一种最普遍采用的控制方法,在机电,冶 金,机械,化工等行业中获得了广泛的应用。将偏差的比例(P) ,积分(I) ,和微分(D) 通过线性组合构成控制量,对被控对象进行控制,故称作 PID 控制器。在模拟控制系统 中,控制器最常用的控制规律是 PID 控制。系统由模拟 PID 控制器和被控对象组成。 PID 控制器是一种线性控制器,他根据给定值 rin(t)与实际输出值 yout(t)构成控 制偏差 error(t)=rin(t)-yout(t)
2
2)I/O接口板 3)开关电源 4)开关、指示灯等电气元件
1.3控制平台组成
主要由以下部分组成: 1)与IBM PC/AT机兼容的Pc机,带PCI插槽 2)PCI2006数据采集卡及其驱动程序 3)控制软件
2、
PID控制原理
PID 控制是最早发展起来的、 应用领域至今仍然很广泛的控制策略之一, 有统计显
过程控制——
三容水箱液位控制
学院名称: 专 班 姓 学 业: 级: 名: 号:
指导老师:
2011 年 11 月
三容水箱液位控制
【摘 要】三容水箱是较为典型的非线性、时延对象,工业上许多被控对象的整体
或局部都可以抽象成三容水箱的数学模型,具有很强的代表性和工业背景,研究三 容水箱的建模及控制具有重要的理论意义及实际应用价值。
4.2控制器设计
利用 MATLAB 的 Simulink 对三容水箱的模型进行仿真。分析阶跃响应特性
图 4.1 三容水箱模型
单位阶跃输入作用下,三个水箱液位变化如下图:
7
图 4.2 三容水箱在阶跃输入下,H1、H2、H3 响应曲线
从 图 中 可 以 看 出 , h1 、 h2 、 h3 的 响 应 速 度 依 次 减 慢 。 调 节 时 间 ts1=1000s,ts2=1500s,ts3=2000s。 h1、 h2、 h3 稳态误差相等, 对于单位阶跃, ess≈0.1. 可见,三容水箱具有由于三个惯性环节串联,响应速度慢,有稳态误差但无超调[3]。 对于本题设的三容水箱的控制器设计,应该使用 PID 控制器, 观察阶跃响应结果, 响应速度比较慢,因此,增大比例度,减小积分时间常数,增大积分时间常数。通过不 断调试,得出的控制器传递函数为: 阶跃响应曲线如下: H3 的调节时间 850s,超调量 12%,稳态误差为 0 。 H2 超调量 73%,H1 超调量 253%。这主要是为增加 H3 的响应速度,但由于 H1,H2 超调量 过大,为避免容器 1,2 溢出,H3 是调节范围就受到限制[4]。