用根轨迹法设计相位超前校正网络.
根轨迹法校正设计
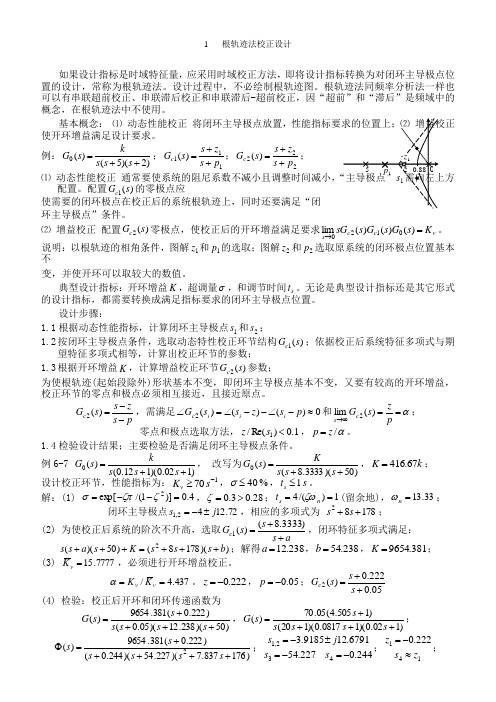
1 根轨迹法校正设计如果设计指标是时域特征量,应采用时域校正方法,即将设计指标转换为对闭环主导极点位置的设计,常称为根轨迹法。
设计过程中,不必绘制根轨迹图。
根轨迹法同频率分析法一样也可以有串联超前校正、串联滞后校正和串联滞后-超前校正,因“超前”和“滞后”是频域中的概念,在根轨迹法中不使用。
基本概念: ⑴ 动态性能校正使开环增益满足设计要求。
例:)2)(5()(0++=s s s k s G ;111)(p s z s s G c ++=;222)(p s z s s G c ++=; ⑴ 动态性能校正 配置。
配置)(1s G c 的零极点应使需要的闭环极点在校正后的系统根轨迹上,同时还要满足“闭环主导极点”条件。
⑵ 增益校正 配置)(2s G c 零极点,使校正后的开环增益满足要求v c c s K s G s G s sG =→)()()(lim 0120。
说明:以根轨迹的相角条件,图解1z 和1p 的选取;图解2z 和2p 选取原系统的闭环极点位置基本不变,并使开环可以取较大的数值。
典型设计指标:开环增益K ,超调量σ,和调节时间s t 。
无论是典型设计指标还是其它形式的设计指标,都需要转换成满足指标要求的闭环主导极点位置。
设计步骤:1.1 根据动态性能指标,计算闭环主导极点1s 和2s ;1.2 按闭环主导极点条件,选取动态特性校正环节结构)(1s G c ;依据校正后系统特征多项式与期望特征多项式相等,计算出校正环节的参数;1.3 根据开环增益K ,计算增益校正环节)(2s G c 参数;为使根轨迹(起始段除外)形状基本不变,即闭环主导极点基本不变,又要有较高的开环增益,校正环节的零点和极点必须相互接近,且接近原点。
p s z s s G c --=)(2,需满足0)()()(2≈-∠--∠=∠p s z s s G i i i c 和α==∞→pz s G c s )(lim 2; 零点和极点选取方法,1.0)Re(/1<s z ,α/z p =。
控制系统MATLAB仿真2-根轨迹仿真
Gk ( s)
k g ( s 0.5) s( s 1)( s 2)( s 5)
绘制系统的根轨迹,确定当系统稳定时,参数kg 的取值范围。 num=[1 0.5]; den=conv([1 3 2],[1 5 0]); G=tf(num,den); K=0:0.05:200; rlocus(G,K) [K,POLES]= rlocfind(G) figure(2) Kg=95; t=0:0.05:10; G0=feedback(tf(Kg*num,den),1); step(G0,t)
Root Locus 8
8 6 4 2 0 -2 -4 -6 -8 -8 x x x
6
4
2
Imaginary Axis
0
-2
-4
-6
-8 -8
-6
-4
-2
0 Real Axis
2
4
6
8
-6
-4
-2
0
2
4
6
8
(a) 直接绘制根轨迹
(b) 返回参数间接绘制根轨迹
图1 例1系统根轨迹
二、MATLAB根轨迹分析实例
用户可以通过Control Architecture窗口进行系 统模型的修改,如图9。
图9 rltool工具Control Architecture窗口
也可通过System Data窗口为不同环节导入已 有模型,如图10。
图10 rltool工具System Data窗口
可以通过Compensator Editor的快捷菜单进行 校正环节参数的修改,如增加或删除零极点、 增加超前或滞后校正环节等,如图11。
Step Response 2 1.8 1.6 1.4 1.2
根轨迹法校正
1 j1.73
按例1,先确定超前网络
c 60 超前角
取 zc 1 ,
得 pc 4
s 1 Gc2 s s4
s1处, 23.8 k* 在
k* k 4 4 1.49
取希望的
k' 5
k' 5 1 3.3 k 1.49
留余量 4 则 0.25
2. 由给定性能指标,确定希望主导 极点(动态性能满足时,希望主导极点 在轨迹上或附近)
* 3. 计算主导极点处增益 k 或需增 大 k 的倍数
4. 计算网络的
值,且留余量
5. 计算zc
s zc G ,构成网络, c s s p c
6. 检验,不满足时,改变余量,重新
设计。
k* 例2:设开环传递函数 Gc s ss 1s 4
s 4.95
s1 处增益 k1* =30.4 在
6. 检验,画根轨迹
1.2 kk 1.84 4 4.95
* 1
k * s 1.2 Gc s Gs ss 1s 4s 4.95
可见:在轨迹 s1, 2 附近。
注意:未校正系统具有距虚轴较近、 开环复数极点时,或系统开环极点 虽均为实数,但过分接近原点,以 及系统具右半平面开环极点时,均 不宜采用串联超前校正。 利用超前校正,其最大超前角 一般取 20 ~ 60
0.5 要求:经校正 t s 10
k 5 1
s
解:1. 画出根轨迹
2. 0.5 ,t s 10 有 n 0.66 s1,2 0.33 0.57 j
可见: s1 在轨迹上或附近,满足动态性能 3. 但在 s1 处的 k * 0.66 0.9 2.66 1.58
基于根轨迹法的串联超前校正器的设计

图 1 有源超前 校正器
此校正器的传递 函数为 : G
。
,其 中, =
>l ,T=RC . 2
徼
l ) 瓜 G f c =
.
【 收稿 日期】 0 1 1 1 2 1—1- 2
【 作者简介】 白莉 (97 ) 张 17 - ,女 ,山西原 平人 ,忻 州师 范学院物理 电子 系讲师 ,硕 士 ,从事 电子技术应用研究。
来 决定 . 系统 要 求实 现 的动 态性 能指 标计 算 出 系统 的期 望 闭环 极 点 ,如 果 系统 的根 轨 迹 没有 通过 期 望 的 根据
闭环极点 ,说 明性能指标不符合要求 ,这时可以通过引人新的开环零点和极点来改变根轨迹的走 向,如果
引 入 的开环 零 极点 合适 ,就可 以使 根 轨迹经 过 期望 的 闭环极 点 ] . 3 串联 超前 校 正参数 计 算
i =1 =l
当 S满 足相 角方 程 时 ,必然 可 以找到 一个 K, 的值 ,使 其 同 时满 足幅 值方 程 . 如果 系统 实 现预 期性 能 指标 对应 的两个 主 导极 点 - : 满 足相 角 方程 ,就 必须 引入 校 正装 置 增 加新 的 ,不 S
开环零点和开环极点来改变根轨迹的走 向. 如果采用 的是串联超前校正 ,其传递 函数为 G () +  ̄ s c :l cT
KH 一 , z )
系统 的开 环传 递 函数 的一般 表 达式 为 G () 。 :
, =lBiblioteka 兀 一 , P) ,=l
其根 轨 迹 的幅 值方 程为
1
—
其 轨 相 方 为 ∑ 一t ∑Zs P) + k 18 (=,,) 根 迹的 角 程 Z一 ( j= ( +)0 02 . ) — 2 1。 1… ,
根轨迹的超前校正
学号:1109141002 2013 - 2014学年第1学期《MATLAB应用设计》题目:基于根轨迹的相位超前校正专业:电气工程学院班级:电气工程及自动化(1)姓名:操勇指导教师:***成绩:电气工程系基于根轨迹的相位超前校正摘要:根轨迹法是一种直观的图解方法,它显示了当系统某一参数(通常为增益)从零变化到无穷大时,如何根据开环极点和零点的位置确定全部闭环极点位置。
从根轨迹图可以看出,只调整增益往往不能获得所希望的性能。
事实上,在某些情况下,对于所有的增益,系统可能都是不稳定的。
因此,必须改造系统的根轨迹,使其满足性能指标。
利用根轨迹法对系统进行超前校正的基本前提是:假设校正后的控制系统有一对闭环主导极点,这样系统的动态性能就可以近似地用这对主导极点所描述的二阶系统来表征。
因此在设计校正装置之前,必须先把系统时域性能的指标转化为一对希望的闭环主导极点。
通过校正装置的引入,使校正后的系统工作在这对希望的闭环主导极点处,而闭环系统的其它极点或靠近某一个闭环零点,或远离s平面的虚轴,使它们对校正后系统动态性能的影响最小。
借助MATLAB,通过编写函数和程序,可以容易地设计出超前校正器,避免了繁琐的计算和绘图过程,从而为线性控制系统的设计提供了一种简单有效的途径。
本文将基于根轨迹法设计超前校正器,并给出它的MATLAB实现。
关键词:根轨迹,超前校正,闭环零点,MATLAB一、根据轨迹法根据轨迹法进行超前校正的一般步骤为:1)根据对系统静态性能指标和动态性能指标的要求,分析确定希望的开环增益和闭环主导极点的位置。
2)画出校正前系统的根轨迹,判断希望的主导极点位于原系统的根轨迹左侧,以确定是否应加超前校正装置。
3)根据题目要求解出超前校正网络在闭环主导极点处应提供的相位超前角。
根据图解法求得Gc(s)的零点和极点,进而求出校正装置的参数。
5)画出校正后系统的根轨迹,校核闭环主导极点是否符合设计要求。
二、超前校正的原理和方法2、1前校正的原理所谓校正,就是在调整放大器增益后仍然不能全面满足设计要求的性能指标的情况下,加入一些参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,达到设计要求。
自动控制原理 第3章习题解答
系统的 Bode 图为图 6-2-1(b)。
图 6-2-1(b)
6-2
2( s + 1) 时,则校正后系统的开环传递函数为: (10 s + 1) 10 2( s + 1) 20( s + 1) G" ( s ) = G ( s )Gc ( s ) = ⋅ = s (0.2s + 1) (10 s + 1) s (0.2 s + 1)(10 s + 1) ∴ 系统的 Bode 图为图 6-2-2。
ϕ c = ±(2k + 1)π − ∠G0 ( s1 ) = −180° − [−∠s1 − ∠( s1 + 1)] = 72.6° (4)由校正后系统的幅值条件,求校正装置的零极点位置及参数 α 和 T
由 K v = lim sG0 ( s ) = lim
s →0 s →0
K = K = 2即K = 2 s +1
该网络为一个比例微分环节,为超前网络。 (2)由题:
U N = U p = 0 i1 + i2 = 0
R1 //
∴U i + U 0 =0 1 R3 R1 // sC
∴ G ( s) =
U 0 ( s) =− U i ( s)
R3
1 sC = −
R1 R3 ( R1Cs + 1)
U0 1 1 R1 + ( + R 4 ) //( R 2 // ) sC 1 sC 2 =0
第 6 章 控制系统的设计和校正习题及解答
6-1 试求题 6-1 图有源网络的传递函数,并说明其网络特性。
题 6-1 图 解(1)由题:
U N = U p = 0 i1 + i2 = 0
倒立摆实验报告(根轨迹)
专业实验报告学生姓名学号指导老师实验名称倒立摆与自动控制原理实验实验时间2014年7月5日一、实验内容(1)完成.直线倒立摆建模、仿真与分析;(2)完成直线一级倒立摆根轨迹校正与仿真控制实验:1)理解并掌握根轨迹控制的原理和方法,并应用于直线一级倒立摆的控制;2)在Simulink中建立直线一级倒立摆模型,通过实验的方法调整根轨迹参数并仿真波形;3)当仿真效果达到预期控制目标后,下载程序到控制机,进行物理实验并获得实际运行图形。
二、实验过程1. 实验原理(1)直线倒立摆建模方法倒立摆是一种有着很强非线性且对快速性要求很高的复杂系统,为了简化直线一级倒立摆系统的分析,在实际的建模过程中,我们做出以下假设:1、忽略空气阻力;2、将系统抽象成由小车和匀质刚性杆组成;3、皮带轮和传送带之间无滑动摩擦,且传送带无伸长现象;4、忽略摆杆和指点以及各接触环节之间的摩擦力。
实际系统的模型参数如下表所示:M 小车质量0.618 kgm 摆杆质量0.0737 kgb 小车摩擦系数0.1 N/m/sec0.1225 ml 摆杆转动轴心到杆质心的长度I 摆杆惯量0.0034 kg*m*mg 重力加速度9.8 kg.m/s(2)直线一级倒立摆根轨迹校正控制原理基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。
确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。
如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。
常见的校正器有超前校正、滞后校正以及超前滞后校正等。
2. 实验方法(1)直线倒立摆建模、仿真与分析利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MA TLAB Simulink中的工具进行仿真分析。
基于根轨迹法的串联超前校正器的设计

基于根轨迹法的串联超前校正器的设计
张白莉
【期刊名称】《长春师范学院学报(自然科学版)》
【年(卷),期】2012(031)003
【摘要】本文提出了用几何法与根轨迹法结合起来设计串联超前校正装置的计算方法。
利用该方法直接可以得到比较精确的校正装置参数,而不需要经过多次凑试,简便有效。
在MATLAB环境下进行实例仿真,验证了该方法的准确性。
%In this paper, a calculation method of series leading corrector that combine geometric method with root locus is proposed. Precise parameters could be obtained by the method without repeated trying. The simulation result in MATLAB showed that the method was effective and utility.
【总页数】4页(P63-66)
【作者】张白莉
【作者单位】忻州师范学院物理电子系,山西忻州034000
【正文语种】中文
【中图分类】TN713
【相关文献】
1.基于根轨迹法的滞后-超前补偿器的计算机辅助设计 [J], 李钟慎
2.基于根轨迹法与串联PID法的激光操作控制系统设计 [J], 吴剑威;唐立新
3.基于MATLAB的串联超前校正器设计 [J], 刘姜涛
4.超前校正器的根轨迹法设计及其MATLAB实现 [J], 李钟慎
5.基于根轨迹法的串联超前校正器的设计 [J], 张白莉;
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
例:有一单位反馈控制系统的开环传函为 G( s) 足下列性能指标;
2500k ,要求满 s( s 25)
(1)当输入是一个1 rad s的单位速度函数时,输出的速度函数
与输入速度函数的最终稳态误差不大于0.01rad;
R( s)
Kr s ( s 2)
C (s)
3
解: 2 (1).由 p 20% ,由式 p e 1 可求得 0.46 ,取 0.5 由 ts 3 得 n 6 rad s ; n 得闭环主导极点 A1,2 n jn 1 2 3 j 3 3
(3)根据稳态指标求出系统所需要的误差系数 K(即开环增益 K0); 0 (4)求出系统为了满足稳态性能指标,误差系数需要增加的倍数
1 K0 ,这 个需要增加的倍数由滞后网络的这一对偶极子提 b K
供;
9
(5)选择滞后校正网络的零点 Z c 及极点 Pc ,使满足 Z c Pc 1 ,
原系统的开环传函为:
根轨迹增益为:
Kr
m
G( s) H ( s)
v n
sv (s p j )
j v 1
i 1 n
s
s pj j v 1
m
s zi i 1
开环增益为: K Kr
7
zi
pj j v 1
i 1 n
1 K ( s z ) ( s )b rc i 校正后系统的开环传函为: bT i 1 Gc ( s)G( s) H ( s) n 1 v s (s p j ) (s ) 校正后在A点的根轨迹增益 T j v 1
21 , 3.画水平线 A1B ,作角平分线 AC ,再作 CA D EAC A1D 1 2
与负实轴交于-9.6,A1E 与负实轴交于-4 G ( s) s 4 c
Im
1
1
s 9.6
B
A1
6
4
2
D
-10 -9 -8 7 -6
C
-5 -4
E
-3 -2 1
O
-2 -4 -6
并要求 Z c和 Pc 离开原点越近越好,但它们离原点越近就意
味着要求 T 越大,物理实现困难,一般取
; ( A P ) ( A Z ) 3 c c
b
(6)画出校正系统的根轨迹;
(7)调整根轨迹增益(放大器增益),使闭环极点位于期望位置;
(8)校验指标;
(9)求出网络参数 R, C ;
n v 1 A A pj A A pj A 1 T j v 1 j v 1 K rc m m 1 b A zi A zi A b i 1 i 1 bT v n
m
A为期望的闭环主导极点,前一项就是 K r 校正系统的开环增益
Kc K rc
可这样去计算:校正后系统的开环传函为:
1 1 aTs K c Gc ( s ) G ( s ) K cG ( s ) a 1 Ts
1
Kc 是附加增益
则: Gc G Gc G A点应满足根轨迹的辐角条件 Gc G (2k 1) 即: Gc (2k 1) G( A) 3.决定Gc (s) 的零极点,按下列步骤得到的Gc (s) 可使它的附加增益 Im 值最小。
Kr K rc b
zi
pj j v 1
i 1 n
m
Kr b
zi
pj j v 1
i 1 n
m
K b
1 即校正后系统的开环增益增大到原系统的开环增益的 b 倍。
8
2.设计步骤: (1)画出未校正系统的根轨迹,根据动态性能指标,在根轨迹上 确定期望闭环主导极点A; (2)确定未校正系统在A点的根轨迹增益和开环增益 K ;
用根轨迹法设计相位超前校正网络 当品质指标以时域指标提出时,用根轨迹设计系统较方便。当 期望闭环主导极点位于未校正系统根轨迹的左边时,就可使用超前 校正。 在不考虑稳态指标时设计步骤如下:
1.根据所需要的动态品质指标要求,确定闭环主导极点A的位置;
2.画出未校正系统的根轨迹,求出使根轨迹通过A点所需要的补偿 角 ,
(2).画出未校正根轨迹。
期望主导极点 A1,2 在原系统根轨迹的左边,
原系统开环极点对于 A1点产生相位为 G( A1 ) A1 ( A1 2)
A1
121 101 222 要使 A1 点位于根轨迹上,校正装置要提 供的相位角为
4
O
180 (222 校正网路 1.设计思路:当滞后网络的零极点相对于主导极点A为一对偶极子 K 时,校正后的开环增益 K c , K 为校正前的开环增益,Kc增大到 b 1 校正前开环增益的 倍, b 1 这样改善了稳态性能。下面具体推 b m 导一下: K r ( s zi )
Re
5
4.画出校正以后系统根轨迹,求出 A1 点根轨迹增益
Kr A1 A1 2 A1 9.6 A1 4 50.4
速度误差系数 K v K K r
4 10.51( 1 ) s 2 9.6
校正系统的开环传函为: K cGc ( s)G ( s)
50.4( s 4) s( s 2)( s 9.6)
B A
(1)过A点作水平线 AB;
(2)做 BAO 的角平分线AC;
2 AE,AD与负实轴的交点则为 1 1D T s 1 T 及 1 aT , 于是有 aT Gc ( s) a 1 T
2
(3)在 AC两边做 DAC EAC ;
2
C
E 1 aT
O
Re
2
4.画出校正系统根轨迹,并由幅值条件求出校正系统的根轨迹增益 及稳态误差的系数。 例. 一控制系统如图所示,现要求满足下列性能指标。 (1)阶跃响应的最大超调量 p 20% ; (2)阶跃响应的调整时间 ts (5%) 1s;