汇川技术IS620系列伺服-V6.0
汇川 IS620P系列伺服在我厂加厚线的应用
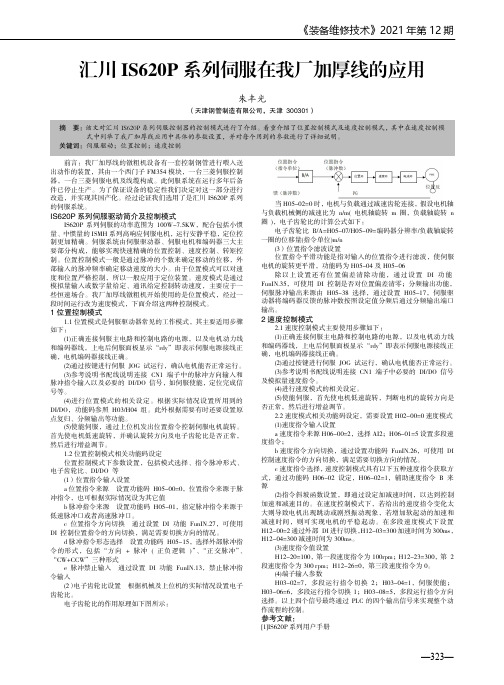
《装备维修技术》2021年第12期—323—汇川IS620P 系列伺服在我厂加厚线的应用朱丰光(天津钢管制造有限公司,天津 300301)前言:我厂加厚线的镦粗机设备有一套控制钢管进行喂入送出动作的装置,其由一个西门子FM354模块,一台三菱伺服控制器,一台三菱伺服电机及线缆构成。
此伺服系统在运行多年后备件已停止生产。
为了保证设备的稳定性我们决定对这一部分进行改造,并实现其国产化。
经过论证我们选用了是汇川IS620P 系列的伺服系统。
IS620P 系列伺服驱动简介及控制模式IS620P 系列伺服的功率范围为100W-7.5KW,配合包括小惯量、中惯量的ISMH 系列高响应伺服电机,运行安静平稳,定位控制更加精确。
伺服系统由伺服驱动器、伺服电机和编码器三大主要部分构成,能够实现快速精确的位置控制、速度控制、转矩控制。
位置控制模式一般是通过脉冲的个数来确定移动的位移,外部输入的脉冲频率确定移动速度的大小。
由于位置模式可以对速度和位置严格控制,所以一般应用于定位装置。
速度模式是通过模拟量输入或数字量给定、通讯给定控制转动速度,主要应于一些恒速场合。
我厂加厚线镦粗机开始使用的是位置模式,经过一段时间运行改为速度模式,下面介绍这两种控制模式。
1位置控制模式1.1位置模式是伺服驱动器常见的工作模式,其主要适用步骤如下:(1)正确连接伺服主电路和控制电路的电源,以及电机动力线和编码器线,上电后伺服面板显示“rdy”即表示伺服电源接线正确,电机编码器接线正确。
(2)通过按键进行伺服 JOG 试运行,确认电机能否正常运行。
(3)参考说明书配线说明连接 CN1 端子中的脉冲方向输入和脉冲指令输入以及必要的 DI/DO 信号,如伺服使能,定位完成信号等。
(4)进行位置模式的相关设定。
根据实际情况设置所用到的 DI/DO,功能码参照 H03/H04 组。
此外根据需要有时还要设置原点复归、分频输出等功能。
(5)使能伺服,通过上位机发出位置指令控制伺服电机旋转。
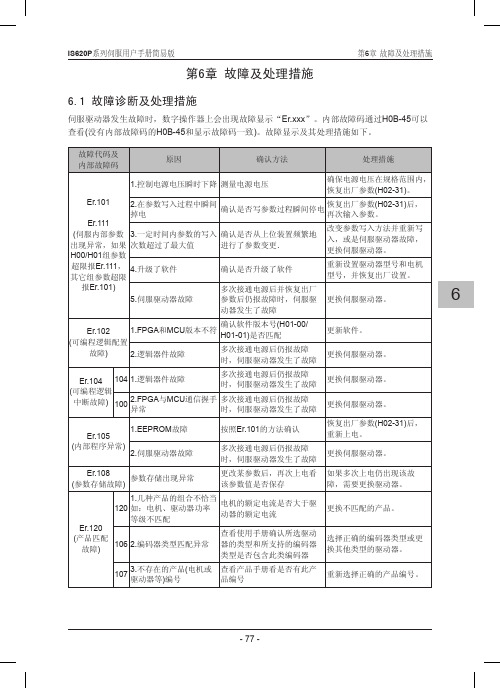
IS620P系列伺服系统常见故障处理
编码器损坏参数设置错误软件版本问题主回路接线问题器件损坏接触不良对地短路过电流过载卡顿伺服驱动器伺服电机负载PLC 编码器线缆IO 线缆电机堵转动力线缆卡死电机损坏IS620P 系列伺服系统故障总导览图UV 红PE W电机烧坏确认方法:用万用表欧姆档分别检测电机UV、欧姆,否则可以确认电机烧坏。
UV红W检测电机是否烧坏1) 检测逆变桥下桥是否直通万用表调到二极管档,红表笔接驱动器端子ϴUVW 红黑,黑表笔依次驱动器UVW 端子,若测量值相近,且在0.3V ~0.7V 之间,说明逆变桥下桥续流二极管正常,否则说明续流下桥二极管损坏。
ϴUVW红黑图:驱动器逆变桥下桥续流二极管检测若测量到下桥续流二极管正常,再将万用表调到电阻档,黑表笔接驱动器端子ϴUVW 红黑,红表笔依次接UVW ,若测量值相近,且阻值为兆(M )级,说明逆变桥下桥IGBT 正常,否则说明逆变桥下桥IGBT 损坏。
图:后台监控UVW缺相示意(W相缺失))若是80及以下基座电机,确认编码器线缆AMP 9PIN插头侧,编码器线的屏蔽层是否有接到AMP 9PIN插头的7脚。
)若是100及以上基座电机,确认编码器线缆17PIN航插侧,编码器线缆的屏蔽层是否有接到航插的J脚。
检查编码器线缆接线是否接错(所需工具:万用表))拔掉编码器线缆后,用万用表电阻档测试DB9插头和AMP 9PIN(或者17PIN航空插头)的连接关系是否满足对应关系。
WUV图:检测电机内部UVW相间短路检测位置反馈值确认驱动器是否损坏用后台软件的示波器功能监控位置指令、位置反馈、速度指令、转矩指令,确认是否位置指令不为零,而位置反馈始终为零。
确认驱动器显示板数码管或其他相关电路不良拆开驱动器塑胶盒体,拆下控制板确认控制板与驱动板连接的排线已经可靠连接,面板仍然无显示,用万用表电压档测量显示板J10的4、5脚,测量到+5V电压值,则说明显示板供电正常,显示板不显示是因为显示相关电路或者数码管不良。
IS620P主要参数设置
5
波特率
7
8
9
H02.00
1
控制模式选择
10
11
H02.02
0或1
正方向选择
驱动器需断电再上电后此更改才能有效
12
13
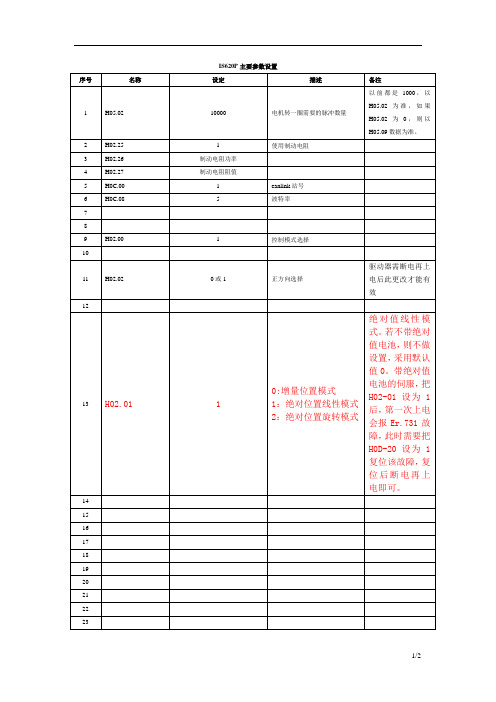
H02.01
1
0:增量位置模式
1:绝对位置线性模式
2:绝对位置旋转模式
绝对值线性模式。若不带绝对值电池,则不做设置,采用默认值0。带绝对值电池的伺服,把H02-01设为1后,第一次上电会报Er.731故障,此时需要把H0D-20设为1复位该故障,复位后断电再上电即可。
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1.转动惯量辨识(具体参照说明书112-114页)
转动惯量比辨识后在H08.15中存储,也可手动修改。
H09.06惯量辨识最大速度(100-1000rpm)
H09.07惯量辨识时加速至最大速度时间常数(20-800ms)
IS620P主要参数设置
序号
名称
设定
描述
0000
电机转一圈需要的脉冲数量
以前都是1000,以H05.02为准,如果H05.02为0,则以H05.09数据为准。
2
H02.25
1
使用制动电阻
3
H02.26
制动电阻功率
4
H02.27
制动电阻阻值
5
H0C.00
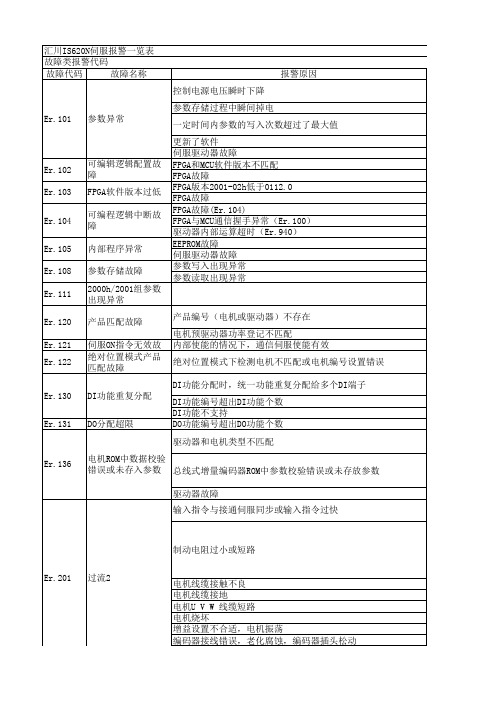
汇川伺服电机报警代码一览表
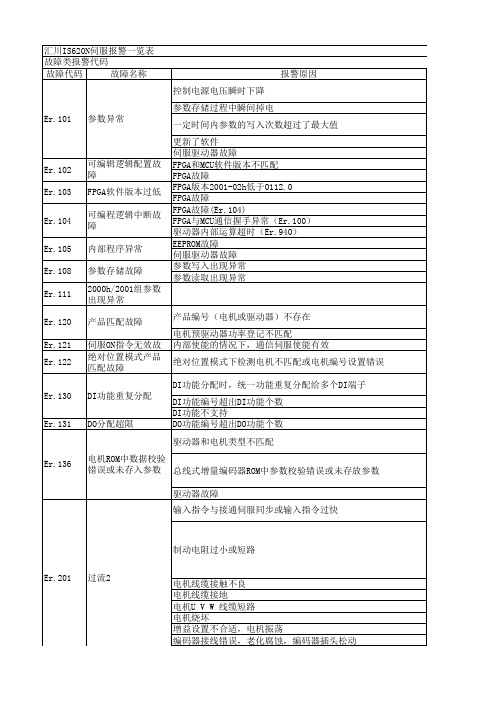
故障类报警代码
故障代码
故障名称
报警原因
控制电源电压瞬时下降
Er.101 参数异常
参数存储过程中瞬间掉电 一定时间内参数的写入次数超过了最大值
Er.102 Er.103 Er.104 Er.105 Er.108 Er.111
可编辑逻辑配置故 障 FPGA软件版本过低
可编程逻辑中断故 障
更换为相互匹配的驱动器及电机
1,使用汇川标配的编码器线缆,电机端确保端子间紧固连接,驱动器端螺丝拧紧,必要时更换新 的编码器线缆。 2,编码器线缆与动力线(R S T、U V W)切勿捆绑,应分开走线。 更换伺服驱动器。 1,指令时序:伺服面板显示“ry”后,先打开伺服使能信号,再输入指令。 2,允许情况下,加入指令滤波时间常数或加大加减速时间。 若使用内置制动电阻,阻值为“0”,则调整为使用外接制动电阻(2002-1Ah=1/2),并拆除P/D 之间的导线,电阻阻值与功率可选用与内置制动电阻规格一致。 若使用外接制动电阻,阻值小于2002-16h,参考手册,更换新的电阻,重新连接于P、C之间。 务必设置2002-1Bh(外接制动电阻功率)2002-1Ch(外接制动电阻阻值)与实际使用外接制动电阻 参数一致。 紧固有松动,脱落的接线。 绝缘不良时更换电机 正确连接电机线缆 不平衡则更换电机 进行增益调整 重新焊接、插紧或更换编码器线缆
使用外接制动电阻时,实际选用的外接制动电阻阻值过大 2002-1Ch(外接制动电阻阻值)大于实际外接制动电阻阻值 主回路输入电压超过规格范围 负载转动惯量比过大 电机速度过高,在设定的减速时间内减速过程未完成,周期性 运动时,处于连续减速状态 伺服驱动器的容量或制动电阻容量不足 伺服驱动器故障
使用外接制动电阻时(2002-1Ah=1或2),外接制动电阻阻值 小于驱动器运行的最小值
汇川技术inovance 轮胎行业整体解决方案彩页 说明书

工业自动化 | 电梯 | 新能源汽车 | 工业机器人 | 轨道交通轮胎行业整体解决方案轮胎行业介新中国成立60多年,中国逐渐成为世界轮胎工艺第一生产大国,占到世界轮胎产销量的30%,已建成各种规格系列产品齐全的完整工艺体系。
但中国轮胎行业大而不强的问题依然存在,严重依赖出口,且劳动成本在逐年升高,因此,生产自动化程度还有大幅的提升空间。
面对残酷的市场环境,企业应该进行持续的研发投入,改进配方,改善工艺,提升设备的自动化率,使轮胎生产更高效、更节能、更环保、品质更高,才能为企业的持续发展提供动力。
汇川技术立足于中国,在过去的十年里,我们已经成为了一家优秀的企业,并建立了完善研发和售后服务平台,因此,汇川技术有实力助力轮胎行业的转型升级,持续为客户提供价值,提升产品的竞争力,汇川也非常希望能和众多的轮胎企业一起为中国轮胎行业发展贡献一份力量。
公司介绍深圳市汇川技术股份有限公司聚焦工业领域的自动化、数字化、智能化,专注“信息层、控制层、驱动层、执行层、传感层”核心技术。
经过17年的发展,公司业务分为:通用自动化业务、电梯电气大配套业务、新能源汽车业务、工业机器人业务、轨道交通业务。
产品包括: ①通用自动化业务,包括各种变频器、伺服系统、控制系统、工业视觉系统、传感器、高性能电机、高精密丝杠、工业互联网等核心部件及光机电液一体化解决方案。
主要的下游行业涵盖:空压机、3C制造、锂电、起重、机床、纺织化纤、印刷包装、塑胶、冶金、石油化工、金属制品、电线电缆、建材、煤矿、注塑机等。
②电梯电气大配套业务,包括电梯一体化控制器(专用变频器)、人机界面、门系统、控制柜、线缆线束、井道电气、电梯互联网等产品。
主要为电梯制造商和电梯后服务市场提供综合电气大配套解决方案。
2019年公司收购了上海贝思特,完善了人机界面、门系统、线缆线束等产品系列。
③新能源汽车业务,包括电机控制器、高性能电机、DC/DC电源、OBC电源、五合一控制器、电驱总成、电源总成等。
汇川技术IS 系列伺服选型手册

深圳市汇川技术股份有限公司Shenzhen lnovance Technology Co., Ltd.地址:深圳市宝安区宝城70区留仙二路鸿威工业区E栋 总机:(0755)2979 9595传真:(0755)2961 9897 客服:400-777-1260 苏州汇川技术有限公司Suzhou lnovance Technology Co., Ltd.地址:苏州市吴中区越溪友翔路16号 总机:(0512)6637 6666 传真:(0512)6285 6720 客服:400-777-1260 IS620系列伺服本公司通过ISO9001TUV Rheinland Group销售服务联络地址V5.1进取 永不止步Forward, Always Progressing变频器 | 伺服系统 | PLC | 机器人 | 轨道交通 | 新能源巴西长春汇通光电技术有限公司杭州汇坤控制技术有限公司欧洲技术中心汇川技术(印度)有限公司服务网络公司总部设在深圳,同时在苏州、香港、杭州等地建立多家子公司 覆盖全国的67个办事处超过400位一线销售及服务人员 240家授权代理商 128家全国联保中心 8个库存中心保证了响应客户需求的及时性。
汇川技术伺服驱动系统平台公司简介深圳市汇川技术股份有限公司(300124)专注于工业自动化驱动与控制产品的研发、生产和销售,定位服务于中高端设备制造商,以拥有自主知识产权的工业自动化控制技术为基础,以快速为客户提供个性化的解决方案为主要经营模式,实现企业价值与客户价值共同成长。
主要产品有低压变频器、高压变频器、一体化及专机、伺服系统、PLC、HMI、永磁同步电机、电动汽车电机控制器、轨道交通牵引系统等;重点布局智能制造、新能源、工业互联网三大领域,产品广泛应用于电梯、起重、机床、金属制品、电线电缆、塑胶、印刷包装、纺织化纤、建材、冶金、煤矿、市政、汽车、轨道交通等行业。
公司在低压变频器市场的占有率在国产品牌厂商中排名第一,其中一体化及专机产品在多个细分行业处于业内首创或领先地位。
汇川伺服产品PPT课件

2009 2011 2012 2013
2015 2016 2017
2019
ISXXX: 删除线表示已经退市 SVXXX: 红色表示还没有正式发布
驱动器产品介绍
IS620 50W~7.5KW
IS650 7.5KW~53KW
SV820N 100W~1KW
IS810 100W~75KW
驱动器产品介绍
可靠性更高
• 采用一步锁紧连接器接线,更加可靠; • 线缆规格中,增加1000万次拖链线缆(日本太阳拖链线),满足机械手、手机行业线缆要求; • 前、后出线可选;
可靠性更高
前出线
后出线
前后出线对比
运行更稳、定位更准
转矩波动小于0.5%,达到Σ7水平
电机整机校正,绝对定位精度达到±15arcsec;
举例说明: 排料机构 铁板印刷后道 中断式位置控制
龙门同步功能
由上位机同时给两驱动器发脉冲指令, 通过 两个电机上的编码器将反馈位置脉冲信息交 互并采样交叉耦合的方式实时调节电机的速 度,使双轴位置同步。大型龙门式结构可以 使用双轴驱动, 减少机械耦合。控制器将自 行作同步的追随,当位置偏差量超过设定的 容许值时,则会发出异常警告,停止系统的 运作。
IS620M
IS620P-C IS620PMC677 SV510P
功能描述 脉冲控制方式
EtherCAT总线控制
M2总线控制 CANopen CANlink 张力控制专机
压合控制专机
兼容上位机 H3U,标准PLC,脉 冲板卡 AM600,欧姆龙NJ, 倍福,Codesys体系 基恩士PLC,新代系 统,M2总线型
举例说明: 模切机 自动锁螺丝机 叠片机
张力控制功能
汇川伺服问题处理文档V1.1(1)
4.干扰问题
1.若上述 1,2,3均排查过无问题,而且740报警断电重启可消除,后间隔偶发出现,大概率为干扰问题
1.排除电机附近干扰源2.电机更换编码器线、加磁环增加屏蔽抗干扰能力
原因:伺服驱动器读取到编码器信号后又断开。
措施:1、确保编码器线接触良好。 2、更换编码器线缆。
2.发生瞬间停电
3.运行中电源电压下降
监测驱动器输入电源电压,查看同一主回路供电电源是否过多开启了其它设置,造成电源容量不足电压下降。
原因:L1、L2输入电压太低。
措施:调整输入电压到正常范围。
产生机理:伺服驱动器未获取到电机编码器中的信息。
原因
确认方法
处理措施
1.驱动器和电机类型不匹配
根据驱动器及电机铭牌,确认是否为我司IS620N系列驱动器和20bit伺服电机(-U2***)。
排查机械因素。
原因:1、电机撞机或卡死。 2、编码器线接错。
措施:1、检测机构。 2、确保编码器对应接对。
产生机理:电机实际转速低于10rpm,但转矩指令达到限定值,且持续时间达到H0A-32设定值。
原因:1、抱闸电机抱闸未打开便运行。 2、负载连接处卡死。 3、负载过大。 4、驱动器编号设置错误 H0102需要设置正确。
原因
确认方法
处理措施
1.驱动器U V W输出缺相或相序接错
无负载情况下进行电机试运行,并检查接线。
按照正确配线重新接线,或更换线缆。
2.驱动器U V W输出断线或编码器断线
检查接线。
按照正确配线重新接线,或更换线缆。
3.因机械因素导致电机堵转
由汇川驱动调试平台或面板显示,确认运行指令和电机转速(H0B-00):位置模式下运行指令:H0B-13(输入位置指令计数器)速度模式下运行指令:H0B-01(速度指令)转矩模式下运行指令:H0B-02(内部转矩指令)确认对应模式下,是否运行指令不为0,而电机转速为0。
汇川IS620运控产品常见现场故障检测指导 V2

运控产品现场检测指导一、目的:本检测指导适用于服务人员在现场排查/判断机器故障时,准确定位问题,避免直接换机造成的返回无法复现问题、延长问题的处理进度。
本指导只是对伺服产品(IS600/IS620系统)的基本的检测和一些出现频率比较高的故障的检测判断方法。
二、需要的工具:万用表、用户调试板、伺服电机、编码器线缆、动力线(UVW线);三、简单故障排查:注1:接线错误:1、UVW相序是否正确?2、编码器线缆是否为标准线缆?客户自制?3、整个系统PE线有无连接在一起?4、CN1端子接线是否松脱?注2:1、查看H00-00的显示与电机铭牌是否一致?2、查看电机型号与驱动器型号(H01-02)是否满足用户手册简易版第7页中伺服系统配置规格一览表的要求。
注3:如果是抱闸电机,需先通24V打开抱闸。
三、详细故障排查:1、硬件故障排查注4:主回路的检测方法如下:整流电路:a、使用万用表的二极管档位,红表笔分别点三相输入端子(R、S、T),黑表笔点“+”,测量整流部分三相上桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图1所示。
图1、整流部分三相上桥测量示意图b、使用万用表的二极管档位,红表笔点“-”,黑表笔分别点三相输入端子(R、S、T),测量整流部分三相下桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图2所示。
图2、整流部分三相下桥测量示意图a、使用万用表的二极管档位,红表笔分别点三相输出端子(U、V、W),黑表笔点“+”,测量逆变部分三相上桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图3所示。
图3、逆变部分三相上桥测量示意图b、使用万用表的二极管档位,红表笔“-”,黑表笔分别点三相输入端子(U、V、W),测量整流部分三相下桥是否正常,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图4所示。
图4、逆变部分三相下桥测量示意图a、使用万用表的二极管档位,红表笔点C,黑表笔点P(+),测量制动管的续流二极管是否良好,万用表显示在0.4V左右为正常,短路或开路说明损坏,如图5所示。
IS620P系列伺服用户使用手册-简易版

到货产品是否与您订购的产品型号相符?箱内含您订购的机器、请通过伺服电机、伺服驱动器的铭牌型号进行确认。
请查看整机外表,产品在运输过程中是否有破损现象。
若发现有某种遗漏或损坏,请速与本公司或您的供货商联系解决。
能够用手轻轻转动则属正常。
带抱闸的伺服电机除外。
目录前言 (1)版本变更记录 (3)第1章伺服系统选型 (7)1.1 伺服电机及驱动器型号说明 (9)1.2 伺服系统配置规格一览表 (10)1.3 配套线缆 (11)1.3.1 非抱闸机型配套线缆 (11)1.3.2 抱闸机型配套线缆 (11)1.3.3 接插套件 (12)1.3.4 绝对值电池套件 (13)1.3.5 通信线缆 (13)1.3.5 线缆外观 (13)1.4 制动电阻相关规格 (15)第2章伺服电机及驱动器安装与尺寸图 (16)2.1 伺服电机的安装 (16)2.1.1 安装场所 (16)2.1.2 环境条件 (16)2.1.3 安装注意事项 (16)2.2 伺服电机外形尺寸图 (18)2.2.1 ISMH1系列Z电机外形尺寸图 (18)2.2.2 ISMH2(Vn=3000rpm,Vmax=6000/5000rpm)系列外形尺寸图 (21)2.2.3 ISMH3(Vn=1500rpm,Vmax=3000rpm)系列外形尺寸图 (23)2.2.4 ISMH4(Vn=3000rpm,Vmax=6000rpm)系列Z电机外形尺寸图 (25)2.3 伺服驱动器的安装 (27)2.3.1 安装场所 (27)2.3.2 环境条件 (27)2.3.3 安装注意事项 (28)2.4 伺服驱动器外形尺寸图 (29)第3章伺服驱动器与电机的连接说明 (30)3.1 伺服驱动器主电路回路连接 (31)3.1.1 主电路端子介绍 (31)3.1.2 主电路连接电缆推荐型号及规格 (33)3.1.3 电源配线实例 (36)3.1.4 伺服驱动器输出与电机线缆连接方法 (38)3.2 伺服电机编码器信号连接方法 (40)3.2.1 总线式增量编码器连接 (40)3.2.2 总线式绝对值编码器连接 (43)3.3 控制信号端子连接方法 (49)3.3.1 位置指令输入信号 (51)3.3.2 模拟量输入信号 (59)3.3.3 数字量输入输出信号 (60)3.3.4 编码器分频输出电路 (63)3.3.5 抱闸配线 (64)3.4 通信信号配线 (68)3.4.1 CAN通信组网连接 (69)3.4.2 485通信组网连接 (71)3.4.3 与PC的通信连接(232通信) (73)3.5 模拟量监视信号配线 (74)3.6 电气接线的抗干扰对策 (75)3.6.1 抗干扰配线举例及接地处理 (75)3.6.2 噪音滤波器的使用方法 (76)3.7 线缆使用的注意事项 (78)第4章运行模式与调试方法 (79)4.1 位置模式使用说明 (79)4.1.1 位置控制模式配线 (80)4.1.2 位置控制模式相关功能码设定 (81)4.2 速度模式使用说明 (85)4.2.1 速度模式配线 (86)4.2.2 速度模式相关功能码设定 (87)4.3 转矩模式使用说明 (91)4.3.1 转矩模式配线 (92)4.3.2 转矩模式相关功能码设定 (93)4.4 绝对值系统使用说明 (98)4.4.1 概述 (98)4.4.2 相关功能码设定 (98)4.4.3绝对值系统电池盒使用注意事项 (102)4.5软限位功能 (103)4.6 运行前检查 (104)4.7 负载惯量辨识与增益调整 (105)4.7.1 惯量辨识 (106)4.7.2 自动增益调整 (107)4.7.3 手动增益调整 (108)4.7.4 陷波器 (108)第5章后台软件 (110)第6章故障处理 (111)6.1 启动时的故障和警告处理 (111)6.1.1 位置控制模式 (111)6.1.2 速度控制模式 (114)6.1.3 转矩控制模式 (116)6.2 运行时的故障和警告处理 (117)6.2.1 故障和警告代码表 (117)6.2.2 故障的处理方法 (122)6.2.3 警告的处理方法 (142)6.2.4 内部故障 (148)第7章功能码参数一览表 (149)H00组伺服电机参数 (149)H01组驱动器参数 (150)H02组基本控制参数 (151)H03组端子输入参数 (152)H04组端子输出参数 (155)H05组位置控制参数 (157)H06组速度控制参数 (160)H07组转矩控制参数 (161)H08组增益类参数 (163)H09组自调整参数 (164)H0A组故障与保护参数 (166)H0B组监控参数 (167)H0C组通讯参数 (169)H0D组辅助功能参数 (171)H0F组全闭环功能参数 (172)H11组多段位置功能参数 (172)H12组多段速度参数 (176)H17组虚拟DIDO参数 (180)H30组通讯读取伺服相关变量 (183)H31组通讯给定伺服相关变量 (184)DIDO功能定义 (184)DB44 DB44 DB44 DB44 DB44。
IS620P系列伺服用户手册-简易版
到货产品是否与您订购的产品型号相符?箱内含您订购的机器、请通过伺服电机、伺服驱动器的铭牌型号进行确认。
请查看整机外表,产品在运输过程中是否有破损现象。
若发现有某种遗漏或损坏,请速与本公司或您的供货商联系解决。
能够用手轻轻转动则属正常。
带抱闸的伺服电机除外。
目录前言 (1)版本变更记录 (3)第1章伺服系统选型 (7)1.1 伺服电机及驱动器型号说明 (9)1.2 伺服系统配置规格一览表 (10)1.3 配套线缆 (11)1.3.1 非抱闸机型配套线缆 (11)1.3.2 抱闸机型配套线缆 (11)1.3.3 接插套件 (12)1.3.4 绝对值电池套件 (13)1.3.5 通信线缆 (13)1.3.5 线缆外观 (13)1.4 制动电阻相关规格 (15)第2章伺服电机及驱动器安装与尺寸图 (16)2.1 伺服电机的安装 (16)2.1.1 安装场所 (16)2.1.2 环境条件 (16)2.1.3 安装注意事项 (16)2.2 伺服电机外形尺寸图 (18)2.2.1 ISMH1系列Z电机外形尺寸图 (18)2.2.2 ISMH2(Vn=3000rpm,Vmax=6000/5000rpm)系列外形尺寸图 (21)2.2.3 ISMH3(Vn=1500rpm,Vmax=3000rpm)系列外形尺寸图 (23)2.2.4 ISMH4(Vn=3000rpm,Vmax=6000rpm)系列Z电机外形尺寸图 (25)2.3 伺服驱动器的安装 (27)2.3.1 安装场所 (27)2.3.2 环境条件 (27)2.3.3 安装注意事项 (28)2.4 伺服驱动器外形尺寸图 (29)第3章伺服驱动器与电机的连接说明 (30)3.1 伺服驱动器主电路回路连接 (31)3.1.1 主电路端子介绍 (31)3.1.2 主电路连接电缆推荐型号及规格 (33)3.1.3 电源配线实例 (36)3.1.4 伺服驱动器输出与电机线缆连接方法 (38)3.2 伺服电机编码器信号连接方法 (40)3.2.1 总线式增量编码器连接 (40)3.2.2 总线式绝对值编码器连接 (43)3.3 控制信号端子连接方法 (49)3.3.1 位置指令输入信号 (51)3.3.2 模拟量输入信号 (59)3.3.3 数字量输入输出信号 (60)3.3.4 编码器分频输出电路 (63)3.3.5 抱闸配线 (64)3.4 通信信号配线 (68)3.4.1 CAN通信组网连接 (69)3.4.2 485通信组网连接 (71)3.4.3 与PC的通信连接(232通信) (73)3.5 模拟量监视信号配线 (74)3.6 电气接线的抗干扰对策 (75)3.6.1 抗干扰配线举例及接地处理 (75)3.6.2 噪音滤波器的使用方法 (76)3.7 线缆使用的注意事项 (78)第4章运行模式与调试方法 (79)4.1 位置模式使用说明 (79)4.1.1 位置控制模式配线 (80)4.1.2 位置控制模式相关功能码设定 (81)4.2 速度模式使用说明 (85)4.2.1 速度模式配线 (86)4.2.2 速度模式相关功能码设定 (87)4.3 转矩模式使用说明 (91)4.3.1 转矩模式配线 (92)4.3.2 转矩模式相关功能码设定 (93)4.4 绝对值系统使用说明 (98)4.4.1 概述 (98)4.4.2 相关功能码设定 (98)4.4.3绝对值系统电池盒使用注意事项 (102)4.5软限位功能 (103)4.6 运行前检查 (104)4.7 负载惯量辨识与增益调整 (105)4.7.1 惯量辨识 (106)4.7.2 自动增益调整 (107)4.7.3 手动增益调整 (108)4.7.4 陷波器 (108)第5章后台软件 (110)第6章故障处理 (111)6.1 启动时的故障和警告处理 (111)6.1.1 位置控制模式 (111)6.1.2 速度控制模式 (114)6.1.3 转矩控制模式 (116)6.2 运行时的故障和警告处理 (117)6.2.1 故障和警告代码表 (117)6.2.2 故障的处理方法 (122)6.2.3 警告的处理方法 (142)6.2.4 内部故障 (148)第7章功能码参数一览表 (149)H00组伺服电机参数 (149)H01组驱动器参数 (150)H02组基本控制参数 (151)H03组端子输入参数 (152)H04组端子输出参数 (155)H05组位置控制参数 (157)H06组速度控制参数 (160)H07组转矩控制参数 (161)H08组增益类参数 (163)H09组自调整参数 (164)H0A组故障与保护参数 (166)H0B组监控参数 (167)H0C组通讯参数 (169)H0D组辅助功能参数 (171)H0F组全闭环功能参数 (172)H11组多段位置功能参数 (172)H12组多段速度参数 (176)H17组虚拟DIDO参数 (180)H30组通讯读取伺服相关变量 (183)H31组通讯给定伺服相关变量 (184)DIDO功能定义 (184)DB44 DB44 DB44 DB44 DB44。
汇川IS620P系列伺服报警信息
1.指令输入与接通伺服同 检查指令输入时序 步或指令输入过快
伺服接通rdy后输入指令。
2.外接制动电阻过小或短 测量制动电阻阻值是否满足 按说明书要求重新选择合理
路
规格
制动电阻。
6
3.电机电缆接触不良 检查线缆连接器是否松脱 紧固松脱连接器。
Er.200
4.电机电缆接地
检查电机UVW线与电机接地 绝缘不良时更换电机。 线之间的绝缘电阻
检查STO端子状态
解除STO输入。
1.AC220V(AC380)用伺 服驱动器,检出直流母 线在420V(760V)以上; 或电源电压高于输入电 压范围;
测量P/⊕、 之间电源电压
将AC电源电压调节到产品规 格范围内。
2.电源处于不稳定状态, 或受到了雷击影响
测量P/⊕、
电源电压
改善电源状况,接入浪涌抑制 器后再接通电源,仍然发生故 障时,更换伺服驱动器。
器。
1.电机接线的UVW相序 确认伺服电机的接线 错误
确认电机接线是否有问题。
Er.500 (电机超速)
2.指令输入值超过了过速 确认输入指令 值
3.电机速度超调
确认电机速度的波形
降低指令值,或调整增益。
降低调节器增益,调整伺服 增益,或调整运行条件。
4.伺服驱动器故障
-
伺服驱动器故障,修理或更 换伺服驱动器。
Er.234
2.干扰引起的初始相位监 UVW相序正确情况下一运行 断电重启。
测错误
就报
(飞车故障) 3.编码器型号设错或接线 确认编码器类型,接线 错误
重新确认电机型号,编码器 类型,编码器接线。
6
◆ 注意:被拖情况下请设置 H0A-12=0 屏蔽此故障。
汇川技术IS620系列伺服-V6.0

IS620系列伺服Servo System变频器 | 伺服系统 | PLC | 机器人 | 轨道交通 | 新能源V6.0资料编号:L6210055服务与技术支持APP 欢迎扫码体验深圳市汇川技术股份有限公司Shenzhen lnovance Technology Co., Ltd.地址:深圳市宝安区宝城70区留仙二路鸿威工业区E栋 总机:(0755)2979 9595传真:(0755)2961 9897 客服:400-777-1260 苏州汇川技术有限公司Suzhou lnovance Technology Co., Ltd.地址:苏州市吴中区越溪友翔路16号 总机:(0512)6637 6666 传真:(0512)6285 6720 客服:400-777-1260汇川技术伺服驱动系统平台米兰中心长春汇通编码器研发中心苏州驱动器与电机研发兼生产基地公司简介深圳市汇川技术股份有限公司(300124)专注于工业自动化驱动与控制产品的研发、生产和销售,定位服务于中高端设备制造商,以拥有自主知识产权的工业自动化控制技术为基础,以快速为客户提供个性化的解决方案为主要经营模式,实现企业价值与客户价值共同成长。
主要产品有低压变频器、高压变频器、一体化及专机、伺服系统、PLC、HMI、永磁同步电机、电动汽车电机控制器、轨道交通牵引系统等;重点布局智能制造、新能源、工业互联网三大领域,产品广泛应用于电梯、起重、机床、金属制品、电线电缆、塑胶、印刷包装、纺织化纤、建材、冶金、煤矿、市政、汽车、轨道交通等行业。
公司在低压变频器市场的占有率在国产品牌厂商中排名第一,其中一体化及专机产品在多个细分行业处于业内首创或领先地位。
公司是国家高新技术企业,截至2016年12月31日,公司及控股子公司拥有已获证书的专利630项,其中发明专利182项,实用新型专利367项,外观专利81项,共取得121项软件著作权。
公司掌握了高性能矢量变频技术、PLC技术、伺服技术和永磁同步电机等核心平台技术,拥有一支人数众多,技术领先的研发团队,专门从事核心平台技术的研究、应用技术的研究和产品的开发。
IS620伺服关于CANLINK的设置
H03-02——H03-19=0屏蔽硬件输入点(硬件输入点只要与VDI不重复设置即可)
H04-00——H04-09=0屏蔽硬件输出点(只要与VDO不重复设置即可)
H0C-09=1使能通信虚拟VDI
H17-00=1定义虚拟VDI1为/S-ON
H31-00 VDI1- VDI16虚拟电平
H04-00——H04-09=0屏蔽硬件输出点(只要与VDO不重复设置即可)
H0C-09=1使能通信虚拟VDI
H17-00=1定义虚拟VDI1为/S-ON
H31-00 VDI1- VDI16虚拟电平
H31-00的设置:转换成二进制后,bit(n)=1表示VDI(n)逻辑为1,例,设置VDI1和VDI6为逻辑1,“100001”,则设置H31-00为十进制33。
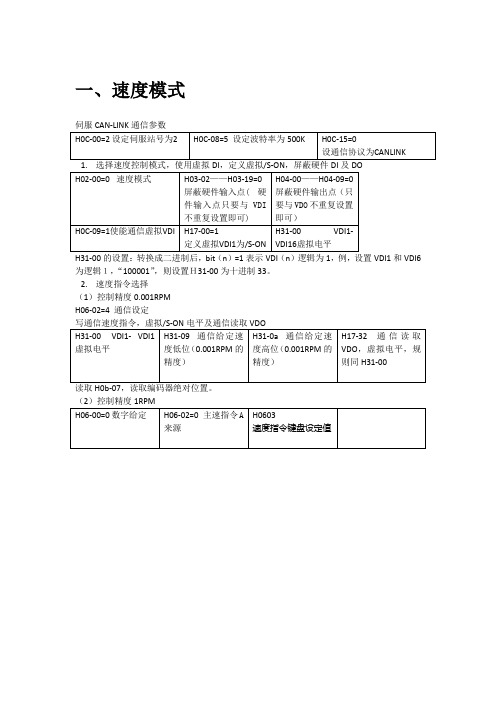
一、速度模式
伺服CAN-LINK通信参数
H0C-00=2设定伺服站号为2
H0C-08=5设定波特率为500K
H0C-15=0设通信协议为CANLINK
1.选择速度控制模式,使用虚拟DI,定义虚拟/S-ON,屏蔽硬件DI及DO
H02-00=0速度模式
H03-02——H03-19=0屏蔽硬件输入点(硬件输入点只要与VDI不重复设置即可)
读取H0b-07,读取编码器绝对位置。
(2)控制精度1RPM
H06-00=0数字给定
H06-02=0主速指令A来源
H0603速度指令键盘设定值
二、位置模式
伺服CAN-LINK通信参数
H0C-00=2设定伺服站号为2
H0C-08=5设定波特率为500K
H0C-15=0设通信协议为CANLINK
1.选择位置控制模式,使用虚拟DI,定义虚拟/S-ON,屏蔽硬件DI及DO
AM600+IS620N常见应用问题处理-归档

前 言AM600+IS620N常见应用问题处理前 言本手册是汇川技术公司AM600系列可编程控制器与IS620N 系列伺服系统搭配使用的常见故障处理指导文档,旨在指导本公司市场服务人员更高效地进行现场故障排查。
IS620N 系列伺服驱动器&伺服电机前 言AM600+IS620N常见应用问题处理版本变更记录目 录AM600+IS620N常见应用问题处理目 录前 言 (1)版本变更记录 (2)一、EtherCAT 通信类故障 (5)伺服运行中报ER.E08故障 (5)网络启动时,主站和IS620N 通信不上 (10)工程中显示的从站顺序混乱 (17)二、参数配置类故障 (18)PDO 参数配置不合理导致伺服无输出 (18)三、常见Er 码 (21)ER.b00:位置偏差过大 (21)ER.b01:位置指令过大 (24)ER.E08:同步丢失 (26)ER.E15:同步周期误差过大 (28)四、后台通信异常类 (29)InoProShop 扫描不到目标设备 (29)InoProShop 网关出现异常 (32)InoProShop 连接设备时不稳定 (35)五、回零类故障 (37)回零不能正常工作 (37)六、数据溢出类故障 (40)数据溢出导致绝对值轴位置突变 (40)七、同步周期&任务周期 (45)简介:EtherCAT 总线周期跟任务周期 (45)EtherCAT 主站跟从站数据交换 (48)实际速度与设定速度不一致(电机传动参数配置无误) (49)位置指令呈阶梯状 (51)除了EtherCAT 正常通讯以外,其他功能响应慢,通讯实时性较差 (52)目 录AM600+IS620N常见应用问题处理八、轴飞车或抖动 (53)EtherCAT总线型伺服驱动器匀速运行过程中,电机抖动(未报错) (53)当伺服驱动器切换控制模式时,电机发生抖动 (55)九、借用DIDO (57)AM600如何使用IS620N的DI/DO (57)限位开关接控制器如何使用伺服回原 (59)十、修改持久性变量后的常见异常现象 (60)持久性变量列表不生效 (60)持久性列表中修改persistent变量时,后台编译错误 (62)登录设备后,persistent变量数据被清除 (63)十一、常见问答 (64)1、PLC程序为什么无法上传到电脑? (64)2、轴运动遇到限位时如何复位? (64)3、伺服报错ER.108如何处置? (64)4、AM600内EtherCAT报错,如何重启? (65)5、InoProShop常用的个性化设置? (66)6、InoProShop扫描设备的操作步骤和注意事项? (67)7、InoProShop的中文兼容性问题? (68)伺服运行中报ER.E08故障一、EtherCAT通信类故障伺服运行中报ER.E08故障☞■具体故障表象:IS620N在运行过程中报出ER.E08。
IS620N简易手册(软件篇)

目录1 EtherCAT通信基础 (3)1.1 EtherCAT通讯规范 (3)1.2 通讯结构 (3)1.3 状态机 (4)1.4 过程数据PDO (5)1.5 邮箱数据SDO (5)1.6 分布时钟 (6)1.7 状态指示 (6)1.8 CiA402控制介绍 (7)1.9 基本特性 (8)1.9.1 接口信息 (8)1.9.2 拓扑连接 (8)1.9.3 通讯电缆 (9)1.9.4 EMC标准 (9)2 基本模式 (10)2.1 操作模式及通信周期 (10)2.1.1 模式定义 (14)2.1.2 各模式支持通信周期 (16)未定义书签。
2.1.3 控制字定义 .......................................................... 错误错误!!未定义书签错误!!未定义书签未定义书签。
2.1.4状态字定义 ........................................................... 错误2.2 周期同步位置模式 (19)2.2.1 控制框图 (20)2.2.2 相关对象 (21)2.2.3 转换因子 (17)2.2.4相关功能设置 (22)2.3 周期同步速度模式 (23)2.3.1控制框图 (23)2.3.2相关对象 (23)2.3.3 相关功能设置 (25)2.4 周期同步转矩模式 (25)2.4.1 相关对象 (26)2.4.2 相关功能设置 (27)2.5 轮廓位置模式 (27)2.5.1 框图 (28)2.5.2 相关对象 (28)2.5.3 相关功能设置 (30)2.5.4 位置曲线发生器 (30)2.6 轮廓速度模式 (35)2.6.1控制框图 (35)2.6.2相关对象 (35)2.6.3 相关功能设置 (36)2.7 轮廓转矩模式 (37)2.7.1 相关对象 (37)2.7.2 相关功能设置 (38)未定义书签。
汇川伺服电机报警代码一览表
Er.120
Er.121 Er.122
产品匹配故障
伺服ON指令无效故 绝对位置模式产品 匹配故障
产品编号(电机或驱动器)不存在
电机预驱动器功率登记不匹配 内部使能的情况下,通信伺服使能有效
绝对位置模式下检测电机不匹配或电机编号设置错误
Er.130 DI功能重复分配 Er.131 DO分配超限
DI功能分配时,统一功能重复分配给多个DI端子
位置指令过大
全闭环位置偏差过 大
相对于运行条件,故障值6065h过小 伺服驱动器/电机故障 位置指令增量过大 模式切换之前或伺服使能时,未将目标位置(607A)与当前位 置对齐 同步周期相位交越,导致位置指令积累过大 电机速度限制错误 驱动器UVW输出缺相或相序接错
汇川伺服电机参数调试说明书

汇川伺服电机参数调试说明书
汇川IS620N总线型:
1、报警代码950:正极限报警。
2、报警代码952:负极限报警。
伺服驱动器H0B组,用于监视电机状态。
H0B-00:显示时间实际电机转速。
H0B-07:显示电机当前绝对位置。
驱动器面板上点动试运行:
参数:
H0815:惯量比。
H0903:在线惯量辨识模式。
0:关闭,1、缓慢变化识别,2、一般识别,3、快速识别。
H0901:刚性等级。
H0900:设为1时启用手动的H0901的刚性表,为0时自动识别设置。
H0202:改变电机旋转方向。
H0203:改变输出脉冲相位。
电子齿轮设置:
电子齿轮比B/A=编码器分辨率/H05-02。
H05-02设置为0时启动1组和2组的切换功能。
汇川技术:好伺服 强烈推荐评级
2018E 5,902 23.5 1,258 18.7 44.4 21.3 19.7 0.76 31.7
6.4
2019E 7,797 32.1 1,586 26.1 43.6 20.3 21.6 0.95 25.1
5.6
2020E 10,177
30.5 1,977 24.6 42.6 19.4 22.6 1.19 20.2
投资建议:国内精益制造的时代背景下,汇川伺服踏浪前行,持续超越行业增速源于多维度的竞争 优势;伺服的乘数效应:伺服的大量铺设将构筑工业互联网的桥头堡,是由“硬”到“软”的必由之路, 未来集硬件、软件和数据于一身,打造工业领域的“IBM”。我们维持公司 2018~2020 年的业绩预测, 预 计 公司 归母 后净 利润 同比增 长 18.7%/26.1%/24.6% ,为 12.58/15.86/19.77 亿 元,EPS 为 0.76/0.95/1.19 元,对应 11 月 16 日收盘价 PE 分别为 31.7/25.1/20.2 倍,看好公司伺服持续受益 于制造升级+进口替代的成长前景,维持“强烈推荐”评级。
伺服行业的态势如何?据 RIC 数据显示,2017 年全球伺服系统市场规模 118.3 亿美元,我国伺服规模全球占比约为 10%,而制造业增加值全球占 比为 26.2%,制造升级的背景下,未来国内伺服市场仍有很大的成长空间。 我们预测未来三年国内伺服行业 CAGR 为 10%,至 2020 年市场规模超 过 100 亿元。目前国内市场伺服系统主要供应商仍以外资企业为主,其中
相关研究报告
《汇川技术*300124*汇川跟踪笔记之一:十年之 期看汇川,轻舟已过万重山》 2018-08-28 证券分析师
朱栋
投资咨询资格编号 S1060516080002 021-20661645 ZHUDONG615@
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IS620系列伺服Servo System变频器 | 伺服系统 | PLC | 机器人 | 轨道交通 | 新能源V6.0资料编号:L6210055服务与技术支持APP 欢迎扫码体验深圳市汇川技术股份有限公司Shenzhen lnovance Technology Co., Ltd.地址:深圳市宝安区宝城70区留仙二路鸿威工业区E栋 总机:(0755)2979 9595传真:(0755)2961 9897 客服:400-777-1260 苏州汇川技术有限公司Suzhou lnovance Technology Co., Ltd.地址:苏州市吴中区越溪友翔路16号 总机:(0512)6637 6666 传真:(0512)6285 6720 客服:400-777-1260汇川技术伺服驱动系统平台米兰中心长春汇通编码器研发中心苏州驱动器与电机研发兼生产基地公司简介深圳市汇川技术股份有限公司(300124)专注于工业自动化驱动与控制产品的研发、生产和销售,定位服务于中高端设备制造商,以拥有自主知识产权的工业自动化控制技术为基础,以快速为客户提供个性化的解决方案为主要经营模式,实现企业价值与客户价值共同成长。
主要产品有低压变频器、高压变频器、一体化及专机、伺服系统、PLC、HMI、永磁同步电机、电动汽车电机控制器、轨道交通牵引系统等;重点布局智能制造、新能源、工业互联网三大领域,产品广泛应用于电梯、起重、机床、金属制品、电线电缆、塑胶、印刷包装、纺织化纤、建材、冶金、煤矿、市政、汽车、轨道交通等行业。
公司在低压变频器市场的占有率在国产品牌厂商中排名第一,其中一体化及专机产品在多个细分行业处于业内首创或领先地位。
公司是国家高新技术企业,截至2016年12月31日,公司及控股子公司拥有已获证书的专利630项,其中发明专利182项,实用新型专利367项,外观专利81项,共取得121项软件著作权。
公司掌握了高性能矢量变频技术、PLC技术、伺服技术和永磁同步电机等核心平台技术,拥有一支人数众多,技术领先的研发团队,专门从事核心平台技术的研究、应用技术的研究和产品的开发。
公司于2010年9月在深交所创业板上市,股票代码:300124。
汇川苏州二期厂区服务网络公司总部设在深圳,同时在苏州、香港等地建立多家子公司 覆盖全国的66个办事处超过400位一线销售及服务人员 269家授权代理商 260家全国联保中心 5个库存中心保证了响应客户需求的及时性。
伺服电机及DDR电机IS620强劲推动产业升级IS620产品特点自主知识产权的编码器通讯协议23b i t多圈绝对值编码器技术Et h e r C A T 总线技术快速可支持1ms内同步100个轴1.2kHz速度环带宽精准绝对值编码器分辨率达到23bit,相当于0.15角秒±20ns同步抖动15ns同步误差方便易用配线方便简单省去限位与原点一键式调整电池更换方便可靠伺服驱动器目录1. EtherCAT总线技术2. 23bit多圈绝对值编码器技术3. IS620伺服介绍3.1 IS620产品特点 3.2 IS620配置表3.3 IS620伺服电机与驱动器产品概述 3.4 IS620配线 3.5 IS620套件选型4. ISMT系列精密直接驱动旋转电机(DDR)5. IS650P伺服介绍050607-3407-141516-2627-3132-3435-3637-38EtherCAT总线技术23bit多圈绝对值编码器技术汇川技术23bit多圈绝对值编码器可以计数65535圈绝对位置游标算法原理EtherCAT协议模型EtherCAT核心技术德国Beckhoff公司开发ETG(EtherCAT Technology Group)协会推广一种完全开放的用于控制和自动化技术的以太网协议EtherCAT是IEC规范 (IEC/PAS 62407)正在投票成为ISO15745-4标准一帧到底EtherCAT一帧数据容量最大可达1470字节,数据在报文传送期间可以修改或添加,而无需堆栈、缓存或分解/组合;每个节点直接使用硬件实现运算,无需软件参与,达到最小的报文延时。
一个伺服轴的延时只有1us。
旋转光栅刻线上下相邻的两条码道的栅格存在唯一的相位差区间。
同步时钟每个EtherCAT从站在从站控制器ESC内部都有时钟机制,叫做从时钟;每个EtherCAT主站内部也有时钟机制,叫做主站时钟;EtherCAT网络把第一个从站时钟当做参考时钟,将参考时钟作为整个系统的系统时钟,所有时钟包括主站时钟都向参考时钟同步;在EtherCAT网络中,分布时钟可以通过同步信号(SYNC信号)使所有EtherCAT设备使用相同的系统时间,从而控制各设备任务的同步执行;SYNC信号发送周期即为同步周期。
同步误差: ~15 ns注:同步误差指任意两节点收到同步信号的时间偏差; 同步抖动指同步信号间隔时间的变动误差。
同步抖动: ~ +/-20ns1.2kHz速度环响应带宽匹配低转矩波动的ISMH系列伺服电机,适用于雕铣机、LED、SMT、模切机、多线切割机等高刚性要求场合。
备注:速度环带宽:伺服系统所能够响应的最快的速度指令的频率。
位置整定时间5~6ms基于转矩前馈的高响应控制,能降低响应延迟,位置整定时间最优可达1ms。
快速23bit绝对值编码器,1圈800万脉冲,可记忆65535圈绝对位置适用于机器人、钻攻中心、伺服刀架、经编机、雕铣机、车铣复合等要求绝对值位置且高刚性的现场。
分辨率达到23bit即0.15角秒,可以帮助伺服电机提高低速抑振能力、减小速度波动;编码器电池使用寿命达2年以上。
EtherCAT伺服IS620N传输速率:2x100Mbps(全双工)刷新时间:100轴×1us/轴传输延时=0.1ms适用于印刷机、圆压圆模切机。
支持1ms同步周期,小于1ms情况下可以支持250μs整数倍的同步同期,适用于雕铣机、印刷机等实时性要求高的现场。
精确同步适用于印刷机、雕铣机、模切机、卫生设备生产线等。
通过E t h e r C A T 分布时钟的精准调整来实现300个节点120m距离,15ns同步误差、±20ns同步抖动。
14:0014:0014:0014:0014:0014:00精准1.2kHz速度环响应带宽EtherCAT总线伺服可支持1ms内同步100个轴绝对值编码器分辨率达到23bit,相当于0.15角秒EtherCAT总线同步时钟15ns同步误差±20ns同步抖动方便易用环境适应性强符合国际安全标准,电机达到较高的防护等级,使用安全可靠电机高的防护等级与高的抗振能力保证伺服产品的环境适应性编码器高抗振性、耐高温标准油封设计,最高可达IP67(轴伸端除外)。
针对特殊现场的定制产品特殊定制的三防漆加厚处理的驱动器适合有高腐蚀气体的现场使用。
可以特殊定制小功率的IP67的接插件非标电机。
编码器抗振动等级达到5G。
在高振动场合可靠运行。
耐温可达120℃。
大幅度节省配线光伏、多晶硅炉、模切机、印刷机、中空玻璃涂胶机等多轴设备。
使用RJ45端口的工业以太网线可以快速连接,大幅减轻配线工作量。
Before After注:该功能可以满足大多数现场,但是对于自动调整效果不满意的现场, 请进行手动调整。
一键式调整适合单轴的伺服调整,直接使用键盘的快捷键或者使用后台的“位置JOG及自调整”功能。
只需要简单的设置即可完成对负载惯量比、增益、共振等的自动调整,以便最大限度发挥伺服性能。
配线方便简单省去限位与原点一键式调整绝对值编码器电池更换方便可靠取消限位与原点开关绝对值编码器的应用,可以省去限位开关与原点开关,在减少故障点的同时,方便配线。
绝对值编码器电池直接附装于驱动器安装及拆换方便。
步骤1上下键同时按,进入一步骤2步骤3由安装在测速辊上的外部编码器反馈物料的实际位置信号,伺服驱动器利用该信号做位置闭环,保证将物料准确平稳的送至预设位置,有效的防止物料与传送带打滑及传动之间的间隙等问题。
其双PG全闭环控制功能由驱动器内部算法实现。
物料传送过程中的速度、位置控制平滑度可由驱动器内置滤波器进行调节,并且内外环位置差异较大时有防止发生飞车的保护,从而保证送料过程的平稳准确可靠,满足生产工艺需要。
钢板剪切,弯管机,剥线机功能描述举例说明在位置模式下,且使能中断定长功能时,外部输入一个DI中断信号后电机立即按照先前的速度方向继续运行设定的长度。
此功能优先级最高,执行最迅速,保证延时最小,可以弥补PLC处理及响应延时长的不足。
中断执行过程中不响应任何其他位置指令,避免正常发送的指令对其产生影响。
排料机构轴承切管铁板印刷后道中断式位置控制功能描述举例说明CANlink是汇川控制技术公司开发的基于CAN总线的网络协议,该协议是一个开放的协议,支持该协议的设备均可接入CANlink网络。
目前CANlink3.0采用主从模式,一个网络中只有并且必须有一个主站,最多可以有62个从站,最大可以支持1M 通讯速率。
利用CANlink可以将我司的HMI、PLC、伺服、变频器组成一个网络,以降低网络的配线难度,提高可靠性及抗干扰能力,在DI、DO使用较多的场合可以规避硬件端口不足的问题。
我司伺服也支持标准的CANopen协议。
弯箍机,模切机,自动锁螺丝机叠片机,注塑机,其他生产线设备CANlink通讯(非标功能)功能描述举例说明一般由安装在测速辊上的外部编码器反馈物料的实际速度和位置信号,伺服以此信息作为主轴信号,对应规划出一条从轴(伺服电机)位置曲线,伺服电机按照此曲线标定的位置运行。
此功能作用是替代机械凸轮,用电气的方式模拟机械凸轮的工作,从而达到减小机械投入,并且可以轻松实现改变凸轮曲线,免更换凸轮及免维护的目的。
可实现旋切,飞剪和追剪,飞锯三种功能。
印刷机械 板材追剪电子凸轮控制(非标功能)功能描述举例说明由上位机同时给两驱动器发脉冲指令,通过两个电机上的编码器将反馈位置脉冲信息交互并采样交叉耦合的方式实时调节电机的速度,使双轴位置同步。
大型龙门式结构可以使用双轴驱动,减少机械耦合。
控制器将自行作同步的追随,当位置偏差量超过设定的容许值时,则会发出异常警告,停止系统的运作。
大型刨床焊割设备玻璃加工龙门同步功能(非标功能)功能描述举例说明通过输入端子的不同组合,选择不同的已经内建的位置指令(相对位置或绝对位置)(通过上位机通讯或手动输入的方式,对驱动器内部功能码预设多组位置信号)。
最多16段位置。
除安装多圈绝对型编码器伺服电机外均需进行上电回零点操作。
可简化上位机的设计。
多段位置执行过程中,每段执行完成均有位置到达信号输出,方便上位机判断。
纵切排刀机构多工位切换机构伺服刀架多段位置控制功能描述举例说明钢板剪切排料机构自动锁螺丝机板材追剪纵切排刀机构...... 位置1位置2位置3位置4位置5位置6位置n张力控制伺服刀架专机直线电机驱动器匹配第三方直线电机,要求位置传感器信号为5V差分ABZ信号,驱动器最大接受脉冲信号频率为4MHz。