三支脚并联运动机床的特点及典型应用
并联运动机床概述
并联运动机床概述并联运动机床是指多个工作台或刀架可以同时进行运动的一种机床。
它通过使用多个独立的工作台或刀架,使得机床在同一台机床上可以同时进行多个加工操作。
这种机床一般由主轴、驱动装置、工作台和控制系统组成。
并联运动机床在工业生产中具有广泛的应用,可以提高工作效率,节约生产成本,对于批量生产和多种类型产品的加工都具有较大的优势。
首先,从加工效率上来看,由于并联运动机床可以同时进行多个工艺操作,可以大大缩短加工时间。
例如,在铣床和镗床的组合机床中,通过同时进行铣削和镗削操作,可以使得零件的加工时间减少一半以上。
这对于生产效率提高有着明显的作用。
其次,从生产成本上来看,由于并联运动机床可以在同一台机床上完成多个工艺操作,减少了物料的输送和处理环节,降低了生产线的长度和设备数量,节约了生产空间。
同时,只需要一个操作工人,减少人工成本。
另外,并联运动机床的能耗也较低,不仅节能环保,还能降低生产成本。
此外,并联运动机床还有以下几个优点:一是具有高精度和高稳定性,可以保证产品的质量和稳定性。
二是具有较强的适应性,可以根据不同的加工要求进行调整和改装。
三是具有较好的安全性,由于多个工作台或刀架可以同时进行运动,避免了工件的迎剪和碰撞现象,减少了事故的发生。
不过,并联运动机床也存在一些不足之处。
首先,由于机床结构复杂,维护和保养难度较大。
其次,并联运动机床的控制系统需要进行复杂的编程和调试,需要专业的技术人员进行操作和维护。
另外,并联运动机床的投资成本较高,对于一些小企业来说可能承担不起。
综上所述,并联运动机床具有较高的加工效率和生产效果,对于提高企业的生产能力和竞争力有着积极的作用。
随着制造业的发展,越来越多的企业开始采用并联运动机床。
未来,随着科技的不断进步和机床制造技术的提高,相信并联运动机床会在产业生产中发挥越来越重要的作用。
并联运动机床与传统机床的比较

并联运动机床与传统机床的比较并联运动机床与传统机床的构造见下列图所示。
并联运动机床与传统机床的比较并联运动机床是以机床框架为固定平台的若干个杆件组成空间并联机构,主轴部件安装在并联机构的动平台上,工作台与机床框架连接在一起。
改变杆件的长度或移动杆件的支点,按照并联运动学原理形成刀具相对于被加工零件的运动轨迹。
并联运动机床与传统机床相比,具有以下优异的性能:运动精度高。
可实现高速加工。
机床刚性好。
构造简单。
由于并联运动机床具有上述显著优点,目前已成为高速高效高柔性加工设备的一个新的发展方向,但是它也存在一些缺点,如控制计算极其复杂,杆件的热变形对机床的加工精度影响比较严重,机床加工的有效空间相对于机床本身体积所占比例较小。
并联运动机床的主要部件相对于传统机床,并联运动机床机械构造简单,模块化程度高,并且具有可重构性。
并联运动机床主要由主轴、杆件及其驱动等机电—体化功能部件及固定平台、动平台、框架等组成。
(1)主轴部件并联运动机床的主轴大多数采用电主轴,其电动机的转子和主轴是一体的,无需任何机械连接。
主轴转速的调节采用变频调速,改变电动机的供电频率,即可实现主轴转速的调节。
下列图为IBAG公司生产的主轴系统。
主轴系统主要包括电主轴及安装调整板、可编程控制器和主轴驱动、主轴冷却系统和润滑系统、刀具夹紧液压系统等组成。
主轴系统(2)杆件杆件是并联机构的运动输入构件。
杆件的物理构造包括机械构件、电气器件、液压部件以及它们的组合,可分为固定杆长和可变杆长两大类。
可变杆长的并联机构,杆件的基点固定,杆件的工作长度可变;固定杆长的并联机构,杆件的长度固定不变,杆件的基点位置可以变化。
从运动学的角度来看,杆件是具有一定刚度的刚体,杆件长度的变化或杆件基点的移动决定了动平台(主轴部件)的运动速度、加速度、位置和姿态。
下列图是固定杆长杆件。
杆件的两端安装有万向铰链,分别用于连接直线电动机滑板和主轴部件动平台。
杆件由管材制成,通过螺纹与万向铰连接。
全方位双三足步行机器人步行原理、机构及控制系统

谢谢观看
机构设计
机构设计
全方位双三足步行机器人的机构设计包括腿部机构、机械结构和驱动方式。 腿部机构是机器人的核心部分,每个腿部机构都包括一个驱动器、一个连接器和 一个脚掌。驱动器用于产生力量,使腿部机构可以完成支撑、抬起和迈步三个动 作。连接器用于连接腿部机构和机器人的主体结构,同时传递驱动力。脚掌底部 装有传感器,可以感知地面状况,为机器人提供更多的触觉信息。
全方位双三足步行机器人步行 原理、机构及控制系统
01 引言
03 机构设计
目录
02 原理分析 04 控制系统
05 实验结果
07 参考内容
目录
06 结论与展望
引言
引言
全方位双三足步行机器人是一种具有高度自主性和灵活性的步行机器人,具 有在复杂环境中稳健行走的能力。这种机器人的研究背景在于,传统轮式或履带 式机器人对于某些特殊环境,如狭小空间、山地、沙地等具有较大的局限性。全 方位双三足步行机器人由于其独特的步行原理和机构设计,能够更好地适应这些 环境。本次演示将详细介绍全方位双三足步行机器人的步行原理、机构及控制系 统。
双足步行机器人的结构
双足步行机器人的结构
双足步行机器人通常由头部、躯干、双臂和双腿等部分组成。其中,双腿是 机器人的核心部分,包括大腿、小腿、脚踝和脚部。为了实现稳定的行走,双足 步行机器人需要具备以下功能:
双足步行机器人的结构
1、支撑身体重量:双足步行机器人需要具备支撑自身重量和负载的能力,以 确保行走稳定。
文献综述
在步态规划方面,研究者们则主要研究如何合理分配各足的运动轨迹和时间, 以提高机器人的行走效率。常见的步态规划方法包括基于规则的方法、基于优化 算法的方法以及基于机器学习的方法等。
新型三自由度并联机床的工作空间分析

新型三 自由度并联机 床 的工作 空 间分析
张 祥 ,金振林
( .燕山大学 机械 工程学院,河北 秦皇岛 0 6 0 ) 1 6 0 4
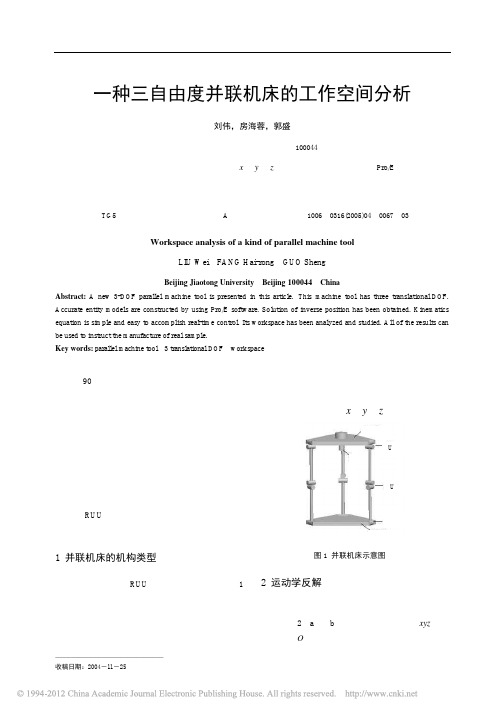
摘 要 :针对~种 新型三 自由度并联机床进 行了研究 ,介绍了其结构布局特点,推 导出位置反解方程,建立 了 结构约束条件,采用数值分析方法绘制出丁工作空间的z 截面边界图以及三维立体图,并定量分析 了机构尺 寸参 数 对上作空 体积 人小的影响 ,这 对该并联机床的合理化设计 很有意义 。 关键词 :j 自由度并联机床 :位置反解:工作空间
珠 丝 杠 动 电机 轨
块 杆
平 台
出了该并联机床 的丁作空间的截面边界图及三维
立体 图, 并定量 分析 了机构尺 参数对工作 空问体 、 J 积大 小 的影 响。
削 刀 具
作 台
1 并联机床的结构布局特 点
该 并联 机床是基 于 3CU 并联 机构设计 的, 一 其结构 示意图如 图 1 所示 。 6个定长 分支两两 ‘ , 组
Fg T ee t fh aall c ieto i.1 h ni o ep rl y t t e ma hn l o
2 位 置 反解
选 取三 组 分支 中 的滑块 都位 于 导轨 中心 时的 位姿 作为 该并联机 构的初始装配 位姿 。 了研 究便 为
构 。每组分 支都可绕滑块上 的转动副转动 ,导轨 上
=
( o 0 Xs O ) Xc s, i , , n ,O
=
( oO r n ,O r s, s 0 ) c i
() 6
其中, =
( ,2 ) 卢1 ,3
把式 ()代入式 () 6 4 可得
=
《2024年微动三指串并联机械手指的研究》范文

《微动三指串并联机械手指的研究》篇一一、引言随着机器人技术的快速发展,机械手指作为机器人手部的重要部分,其研究与应用日益受到关注。
微动三指串并联机械手指作为一种新型的机械结构,具有灵活度高、操作精确、适应性强等优点,在工业生产、医疗康复、军事等领域具有广泛的应用前景。
本文旨在研究微动三指串并联机械手指的构造、原理及其应用,为相关研究与应用提供理论支持和实践指导。
二、微动三指串并联机械手指的构造与原理微动三指串并联机械手指主要由三个串并联的指节构成,每个指节通过电机驱动、传感器控制,实现灵活的弯曲与伸展。
其中,每个指节由驱动模块、传感器模块和结构模块三部分组成。
驱动模块采用微电机,具有体积小、功率大、控制精度高等优点。
传感器模块则采用力传感器和位置传感器,实时监测指节的弯曲程度和受力情况,为电机提供精确的控制信号。
结构模块则采用轻质高强的材料,保证指节的灵活性和耐用性。
在原理方面,微动三指串并联机械手指通过电机驱动指节弯曲与伸展,实现抓取、夹持等动作。
同时,通过传感器实时监测指节的弯曲程度和受力情况,实现精确控制。
此外,三个指节的串并联结构使得机械手指具有更好的灵活性和适应性,能够适应不同形状和大小的物体。
三、微动三指串并联机械手指的应用微动三指串并联机械手指具有广泛的应用前景。
在工业生产中,它可以替代人工进行重复性、高强度的抓取工作,提高生产效率。
在医疗康复领域,它可以用于帮助患者进行康复训练,提高患者的生活质量。
在军事领域,它可以用于执行危险、复杂的任务,保障人员的安全。
四、实验研究与分析为了验证微动三指串并联机械手指的性能,我们进行了相关实验研究。
首先,我们对机械手指的驱动模块、传感器模块和结构模块进行了性能测试,确保其满足设计要求。
然后,我们在不同环境下对机械手指进行了抓取实验,测试其抓取不同形状和大小的物体的能力。
实验结果表明,微动三指串并联机械手指具有较高的灵活性和适应性,能够满足不同应用场景的需求。
一种三自由度并联机床的工作空间分析
Workspace analysis of a kind of parallel machine tool LIU Wei,FANG Hai-rong,GUO Sheng
( Beijing Jiaotong University, Beijing 100044, China ) Abstract: A new 3-DOF parallel machine tool is presented in this article. This machine tool has three translational DOF. Accurate entity models are constructed by using Pro/E software. Solution of inverse position has been obtained. Kinematics equation is simple and easy to accomplish real-time control. Its workspace has been analyzed and studied. All of the results can be used to instruct the manufacture of real sample. Key words: parallel machine tool;3 translational DOF;workspace
这里 c 代表余弦,s 代表正弦, l 1 和 l 2 分别为
AiCi , CiBi 的长度。
由于该并联机构具有三个平动自由度, 动平台 的姿态不会发生变化,只是位置发生变化。所谓的 运动学反解,就是给定动平台 B i 点(i =1, 2, 3) 在中
机械 2005 年第4 期 总第32卷 机器人技术 ・69・
同济大学--张曙典型的并联运动机床(1)

同济大学--张曙典型的并联运动机床(1)简介早期的并联运动机床 1994年,在美国芝加哥国际机床展览会上,美国Giddings & Lewis公司首次展出了Variax型并联运动机床,引起轰动。
它是一台以Stewart平台为基础的5坐标立式加工中心,标志着机床设计开始采用并联机构,是机床结构重大改革的里程碑,其内部结构如图1所示。
从图中可见,6根由伺服电动机驱动的伸缩杆,借助万向铰固定在下平台上,这种结构也被称为6条腿 (Hexapod),丝杆的螺母通过万向铰支承着上平台。
杆件长度的伸缩使带有主轴部件的上平台完成加工零件所需的运动。
Variax型加工中心是一种内铣型结构,机床占地面积为7800mm′8180mm,而工作空间仅有700mm′700mm′750mm,安装工件也不太方便,因此没有在生产中获得应用。
后来该机床提供给英国诺廷汉大学工学院作为进行航空工业敏捷制造项目研究的设备。
嗣后,美国Ingersoll公司推出采用并联机构的VOH 1000型立式加工中心和HOH 600型卧式加工中心,在结构上作了最大改进,从内铣型改为外铣型,明显缩小动平台的体积,减轻了运动部件的重量,安装工件也较为方便,对并联运动机床的发展曾经产生很大的影响。
但是由于种种原因,Ingersoll机床也没有投入生产实际应用。
两台VOH 1000型立式加工中心分别交付给美国国家标准和技术研究所和美国国家宇航局进行研究。
HOH 600型加工中心提供给德国阿亨工业大学的机床实验室进行研究。
它们的研究结果对并联运动机床的发展起到很大的促进作用。
Ingersoll公司HOH 600型的外观如2所示。
通过早期并联运动机床的试验研究表明,并联运动机床与传统机床比较,具有一下优点:1) 运动部件质量小,运动惯性小;2) 高运动速度和高加速度,适合高速加工;3) 主要部件具有重复性,通用程度高;4) 容易通过预加载荷,提高机床部件的刚度;5) 通过控制系统可以实现运动精度的补偿。
3自由度并联机床的运动学和动力学研究(翻译)

3自由度并联机床的运动学和动力学研究摘要:中国东北大学已经研制出一种用于钢坯研磨的新型3自由度并联机床。
它具有结构简单,刚度大的优点,更高的力量重量比,较大的工作空间,简单的运动学方程,没有运动的奇异位姿。
在使用相应刀具情况下该机器人可用于磨削,研磨,抛光等加工过程。
在本文中,介绍了简单的机器人的结构和自由度,运动学和工作空间,精度分析,静态和动态的分析及其相关参数。
关键词:并联机床;运动学;动力学;3自由度1.前言与传统机床相比,并联机床具有更高的精度,高刚度的优点,和更高的刚度质量比,所以近些年它得到了行业和机构大量的研究和评估。
由美国Giddings & Lewis公司研制的“六足虫”并联机床被认为是21世纪机床领域中的革命性理念。
然而这个Stewart平台存在运动耦合的缺点,并且具有复杂的运动学和构件要求十分严格。
这类少于六自由度并联机床在行业和机构也因此受到越来越多的关注。
意大利Comau研制出了一种命名为Tricept的四条腿的的三自由度并联机床。
东北大学已经开发出了一种新型三自由度的三腿平行磨削机床(图1)。
与“六足虫”并联机床相比,此三腿平行磨削并联机床具有以下优点:(1)结构简单且具有更大工作空间;(2)动力学方程简单便于控制操作;(3)在工作空间没有运动耦合状态。
图12.并联机床2.1 3自由度系统的布局该三自由度并联机构由一个移动平台,基础平台,一个平行的联动和三条腿的连接两个平台。
中间腿支链控制的移动平台的三个自由,如图2所示。
移动平台的转换是由平行连杆机构控制。
图22.2 运动学和工作空间移动平台平行于基础平台,一个坐标系统(O- X,Y,Z)选择如图2所示,这种机制的逆向运动学正解方程可以表示为:123l l l ===其中w=a-b,2m = ,n=w/2 ,a 和分别表示基础平台的两侧的长度和等边三角形状的移动平台的长度。
该机构的位置正解方程可表示为:2222222132X l l w Y w Z =-+==从公式1和2可知系统在整个工作空间无奇异位姿和运动耦合。
并联运动机床概述

来自/jxzb/part3/part3-chapter2-101.html并联运动机床概述并联运动机床是以空间并联机构为基础,充分利用计算机数字控制的潜力,以软件取代部分硬件,以电气装置和电子器件取代部分机械传动,使将近两个世纪以来以笛卡儿坐标直线位移为基础的机床结构和运动学原理发生了根本变化。
1994年,美国 Giddings & Lewis 公司展出第一台并联运动机床:Variax 加工中心,该机床现在英国 Nottingham 大学工学院;1996年,美国 Ingersoll 公司推出VOH1000型立式加工中心和HOH600型卧式加工中心,现分别在美国国家标准与技术研究所和德国阿亨工业大学机床实验室。
Variax 型加工中心HOH 600型卧式加工中心通过早期并联运动机床的试验研究表明,并联运动机床与传统机床比较,具有以下特点:1) 运动部件质量小,运动惯性小;2) 高运动速度和高加速度,适合高速加工;3) 主要部件具有重复性,通用程度高;4) 容易通过预加载荷,提高机床部件的刚度;5) 通过控制系统可以实现运动精度的补偿。
并联机构概念设计并联机构(Parallel mechanism)是由2个和2个以上的驱动器(作动器)通过杆系同时作用于运动平台的空间运动机构。
它的特点是,所有的分支机构可同时接受驱动器的输入,而最终共同给出输出,并联机构在机构学上是多路闭环机构。
在工业中,3杆并联机构(Tripod)和6杆并联机构(Hexapod)应用最为广泛,如Delta 机器人和 Tricept 机器人是典型的3杆并联机构,而Stewart 平台是典型的 6杆并联机构。
其机构如下图所示:6自由度的Delta并联机构Stewart 运动平台概念设计的主要内容:1)机构综合。
根据加工要求,选定并联运动机构所需的自由度,建立相应的运动学模型。
2)空间位置分析及坐标转换。
并联运动机床的空间位置分析比较复杂,位置分析法分为正解法和逆解法。
并联机床

并联机床一定义:并联机床(Parallel Machine Tools),又称并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),也曾被称为六条腿机床、六足虫(Hexapods)。
并联机床是基于空间并联机构Stewart平台原理开发的,是近年才出现的一种新概念机床,它是并联机器人机构与机床结合的产物,是空间机构学、机械制造、数控技术、计算机软硬技术和CAD/CAM技术高度结合的高科技产品。
它克服了传统机床串联机构刀具只能沿固定导轨进给、刀具作业自由度偏低、设备加工灵活性和机动性不够等固有缺陷,可实现多坐标联动数控加工、装配和测量多种功能,更能满足复杂特种零件的加工。
自其1994年在美国芝加哥机床展上首次面世即被誉为是“21世纪的机床”,成为机床家族中最有生命力的新成员。
2.并联机床的特点整体而言,传统的串联机构机床,是属于数学简单而机构复杂的机床,而相对的,并联机构机床则机构简单而数学复杂,整个平台的运动牵涉到相当庞大的数学运算,因此虚拟轴并联机床是一种知识密集型机构。
这种新型机床完全打破了传统机床结构的概念,抛弃了固定导轨的刀具导向方式,采用了多杆并联机构驱动,大大提高了机床的刚度,使加工精度和加工质量都有较大的改进。
另外,由于其进给速度的提高,从而使高速、超高速加工更容易实现。
由于这种机床具有高刚度、高承载能力、高速度、高精度以及重量轻、机械结构简单、制造成本低、标准化程度高等优点,在许多领域都得到了成功的应用,因此受到学术界的广泛关注。
由并联、串联同时组成的混联式数控机床,不但具有并联机床的优点,而且在使用上更具实用价值。
随着高速切削的不断发展,传统串联式机构构造平台的结构刚性与移动台高速化逐渐成为技术发展的瓶颈,而并联式平台便成为最佳的候选对象,而相对于串联式机床来说,并联式工作平台具有如下特点和优点:结构简单、价格低。
并联运动机床 三杆并联运动机床
位置测量反馈系统
转角测量 位置输入 位移测量
误差补偿 位置测量 Tricept 机器人 位置比较
Prof. Shu Zhang Institute 转角测量 on Advanced Manufacturing Technology, Tongji University
机床的结构特点
机床采用3自由度的 Tricept 805型并联机器人和可绕 2 个轴线回转的主轴部件,现实主轴的 5个坐标运动 为了装卸工件方便,机器人安装在机床立柱的45°倾 斜面上 机床采用3个位置测量反馈系统,提高了加工精度
输送管道和零件的取放
主轴夹盘 零件
输送管道
刀具 刀夹
Prof. Shu Zhang Institute on Advanced Manufacturing Technology, Tongji University
待加工零件的输送控制
进入管道
待加工零件
传送数量 控制
Prof. Shu Zhang Institute on Advanced Manufacturing Technology, Tongji University
Tricept 805枪钻长
Prof. Shu Zhang Institute on Advanced Manufacturing Technology, Tongji University
加工波音飞机结构零件
Tricept机器人
高速铣头
移动工作台 Prof. Shu Zhang Institute on Advanced Manufacturing Technology, Tongji University
机床的结构配置
电滚珠丝杆 工件
三爪卡盘装夹工件的特点及应用

三爪卡盘装夹工件的特点及应用三爪卡盘是一种常见的夹具装夹工件的设备。
它由三个对称排列的活动爪子组成,适用于各种工件的夹紧和固定。
以下是关于三爪卡盘的特点和应用的详细介绍。
特点:1.紧固力强:三爪卡盘的设计使其能够提供较高的夹紧力,确保工件的稳定性和安全性。
每个爪子都可以独立运动和调整,以适应不同形状和尺寸的工件。
2.定位准确:三爪卡盘可以精确定位工件,并使其保持正确的位置和角度。
这对于需要进行精确加工的工件来说非常重要,可提高加工质量和产品的精度。
3.灵活性高:三爪卡盘可以适应不同形状和尺寸的工件,具有广泛的适用性。
在夹紧各种工件时,只需要调整爪子的位置和夹紧力即可。
4.换模方便:三爪卡盘可以迅速更换爪子,以适应不同的工件。
这种灵活性使三爪卡盘成为一种常见的夹具设备,广泛应用于汽车、航空航天、机械加工等领域。
应用:1.金属加工:三爪卡盘广泛应用于金属加工中,如铣床、车床、刨床等设备。
它可以夹住各种形状和尺寸的金属工件,提供稳定的夹紧力和准确的定位,以保持加工的精度和质量。
2.木工加工:三爪卡盘也可用于木工加工中,如木工车床和木工铣床等设备。
它可以安全地夹紧木材,在进行切削、雕刻和打磨等操作时保持稳定性。
3.汽车制造:汽车制造中需要夹紧和固定各种零件和组件,三爪卡盘是一种常见的夹具设备。
它可以用于装配线上的汽车零部件,如引擎、刹车盘、曲轴等。
4.航空航天:在航空航天领域,需要对各种复杂的零件和组件进行加工和装配。
三爪卡盘可以提供合适的夹紧力和定位准确性,帮助提高生产效率和产品质量。
5.机械制造:三爪卡盘也广泛应用于机械制造中的各种设备和工序。
它可以夹紧和固定各种机械零件,如轴承、齿轮、连杆等,以确保其稳定性和精度。
总结:三爪卡盘作为一种常见的夹具装夹工件的设备,具有紧固力强、定位准确、灵活性高和换模方便的特点。
它在金属加工、木工加工、汽车制造、航空航天和机械制造等领域都有广泛的应用。
通过使用三爪卡盘,可以提高生产效率和产品质量,为各种工件的加工和装配提供方便和可靠的解决方案。
并联机构、并联运动机床
3.2并联机床的特点
3.4 国内并联机床研究
燕山大学黄真教授VAMT1Y
3.4 国内并联机床研究
哈尔滨工业大学加工汽轮机叶片并联机床
数控镗铣虚拟轴机床
3.4 国内并联机床研究
V100型并联车削中心
3.4 国内并联机床研究
哈量LINKS-EXE700并联机床
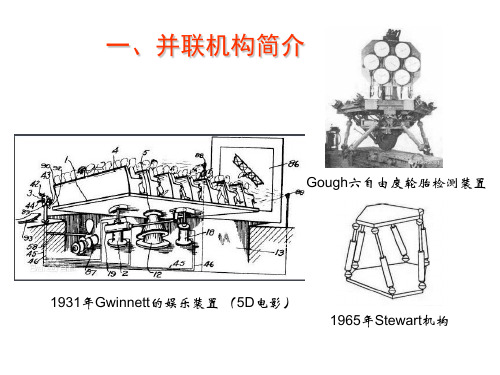
四、并联机构的其他应用
飞行模拟器
四、并联机构的其他应用
传统机床与并联机床的综合性能比较
3.3 实用阶段的并联机床
6X Hexa 立式加工中心
3.3 实用阶段的并联机床
КИМ-750型测量机 美国Hexel公司的P2000型5轴加工铣床
3.3 实用阶段的并联机床
德国Herkert机床公司SKM400型卧式加工中心
3.3 实用阶段的并联机床
德国DS-Technologie公司Sprint Z3型动力头
3D打印机
天文望远镜
四、并联机构的其他应用
医疗手术
在2O世纪9O年代中期问世的并联机床,正是为 解决传统机床存在的问题而进行的一种新的尝试。
3.1早期的并联运动机床
Variax 型加工中心
3.1早期的并联运动机床
美国 Ingersoll公司 VOH 600
3.1早期的并联运动机床
美国 Ingersoll公司 HOH 1000
3.2并联机床的特点
并联机床的特性与应用
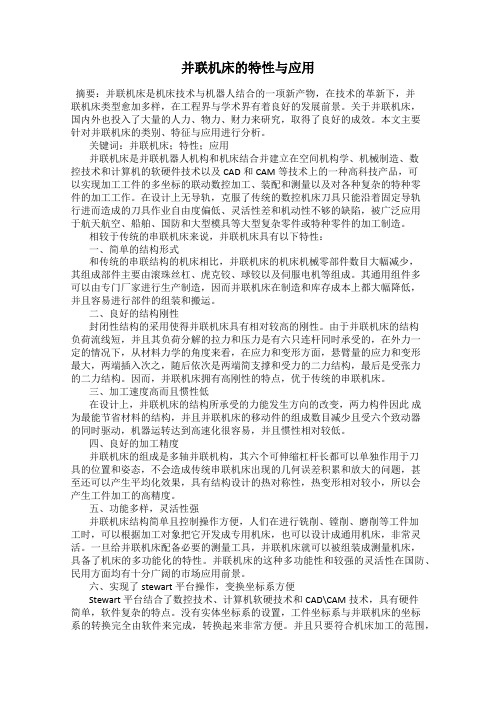
并联机床的特性与应用摘要:并联机床是机床技术与机器人结合的一项新产物,在技术的革新下,并联机床类型愈加多样,在工程界与学术界有着良好的发展前景。
关于并联机床,国内外也投入了大量的人力、物力、财力来研究,取得了良好的成效。
本文主要针对并联机床的类别、特征与应用进行分析。
关键词:并联机床;特性;应用并联机床是并联机器人机构和机床结合并建立在空间机构学、机械制造、数控技术和计算机的软硬件技术以及CAD和CAM等技术上的一种高科技产品,可以实现加工工件的多坐标的联动数控加工、装配和测量以及对各种复杂的特种零件的加工工作。
在设计上无导轨,克服了传统的数控机床刀具只能沿着固定导轨行进而造成的刀具作业自由度偏低、灵活性差和机动性不够的缺陷,被广泛应用于航天航空、船舶、国防和大型模具等大型复杂零件或特种零件的加工制造。
相较于传统的串联机床来说,并联机床具有以下特性:一、简单的结构形式和传统的串联结构的机床相比,并联机床的机床机械零部件数目大幅减少,其组成部件主要由滚珠丝杠、虎克铰、球铰以及伺服电机等组成。
其通用组件多可以由专门厂家进行生产制造,因而并联机床在制造和库存成本上都大幅降低,并且容易进行部件的组装和搬运。
二、良好的结构刚性封闭性结构的采用使得并联机床具有相对较高的刚性。
由于并联机床的结构负荷流线短,并且其负荷分解的拉力和压力是有六只连杆同时承受的,在外力一定的情况下,从材料力学的角度来看,在应力和变形方面,悬臂量的应力和变形最大,两端插入次之,随后依次是两端简支撑和受力的二力结构,最后是受张力的二力结构。
因而,并联机床拥有高刚性的特点,优于传统的串联机床。
三、加工速度高而且惯性低在设计上,并联机床的结构所承受的力能发生方向的改变,两力构件因此成为最能节省材料的结构,并且并联机床的移动件的组成数目减少且受六个致动器的同时驱动,机器运转达到高速化很容易,并且惯性相对较低。
四、良好的加工精度并联机床的组成是多轴并联机构,其六个可伸缩杠杆长都可以单独作用于刀具的位置和姿态,不会造成传统串联机床出现的几何误差积累和放大的问题,甚至还可以产生平均化效果,具有结构设计的热对称性,热变形相对较小,所以会产生工件加工的高精度。
并联机床

与传统机床的比较
传统数控机床是按笛卡尔坐标将沿3个坐 传统数控机床是按笛卡尔坐标将沿 个坐 标轴线的移动 X、Y、Z 和绕 个坐标轴线转 、 、 和绕3个坐标轴线转 的控制依次串联叠加, 动 A、B、C的控制依次串联叠加,形成所需 、 、 的控制依次串联叠加 的刀具运动轨迹。 的刀具运动轨迹。 并联运动机床是采用各种类型的多杆机 构在空间同时移转主轴部件,形成所需的刀 构在空间同时移转主轴部件, 具运动轨迹。 具运动轨迹。
伺服电动 机
万向铰链
滚珠丝杠
主轴部件 环形铰链
崭新的5杆配置使机床具有以下特点: 崭新的 杆配置使机床具有以下特点: 杆配置使机床具有以下特点
1) 机床运动部件的质量很小,采用功率小的驱动装置就 机床运动部件的质量很小, 可以达到很高的加速度,所产生的惯性反作用力也非常小。 可以达到很高的加速度,所产生的惯性反作用力也非常小。 2) 采用封闭框架结构和对称配置,使机床工作时产生的 采用封闭框架结构和对称配置, 力尽可能相互抵消,从而保证机床的高动态性能。 力尽可能相互抵消,从而保证机床的高动态性能。 3) 机床结构简单,部件的种类和数量少,模块化程度高 机床结构简单,部件的种类和数量少, 工作可靠性高,维护方便,易于重组。 ,工作可靠性高,维护方便,易于重组。 4)主轴部件可偏转 以上,实现真正的五面加工,偏转 主轴部件可偏转90º以上 实现真正的五面加工, 主轴部件可偏转 以上, 运动稳定。 运动稳定。
5轴数控机床: 轴数控机床: 轴数控机床 按笛卡尔坐标控制 沿3个轴线的移动 个轴线的移动 和绕2个轴线的转 和绕 个轴线的转 动
并联运动机床: 并联运动机床: 6杆并联运动机构通过 杆并联运动机构通过 杆件长度的变化驱动 主轴部件,实现6自由 主轴部件,实现 自由 度的运动
航空航天自动化之钥匙_并联机床应用于航空加工领域
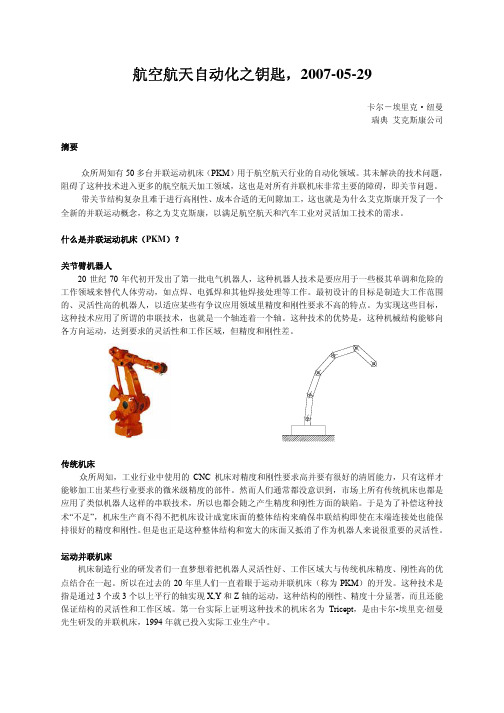
航空航天自动化之钥匙,2007-05-29卡尔-埃里克·纽曼瑞典艾克斯康公司摘要众所周知有50多台并联运动机床(PKM)用于航空航天行业的自动化领域。
其未解决的技术问题,阻碍了这种技术进入更多的航空航天加工领域,这也是对所有并联机床非常主要的障碍,即关节问题。
带关节结构复杂且难于进行高刚性、成本合适的无间隙加工,这也就是为什么艾克斯康开发了一个全新的并联运动概念,称之为艾克斯康,以满足航空航天和汽车工业对灵活加工技术的需求。
什么是并联运动机床(PKM)?关节臂机器人20世纪70年代初开发出了第一批电气机器人,这种机器人技术是要应用于一些极其单调和危险的工作领域来替代人体劳动,如点焊、电弧焊和其他焊接处理等工作。
最初设计的目标是制造大工作范围的、灵活性高的机器人,以适应某些有争议应用领域里精度和刚性要求不高的特点。
为实现这些目标,这种技术应用了所谓的串联技术,也就是一个轴连着一个轴。
这种技术的优势是,这种机械结构能够向各方向运动,达到要求的灵活性和工作区域,但精度和刚性差。
传统机床众所周知,工业行业中使用的CNC机床对精度和刚性要求高并要有很好的清屑能力,只有这样才能够加工出某些行业要求的微米级精度的部件。
然而人们通常都没意识到,市场上所有传统机床也都是应用了类似机器人这样的串联技术,所以也都会随之产生精度和刚性方面的缺陷。
于是为了补偿这种技术“不足”,机床生产商不得不把机床设计成宽床面的整体结构来确保串联结构即使在末端连接处也能保持很好的精度和刚性。
但是也正是这种整体结构和宽大的床面又抵消了作为机器人来说很重要的灵活性。
运动并联机床机床制造行业的研发者们一直梦想着把机器人灵活性好、工作区域大与传统机床精度、刚性高的优点结合在一起。
所以在过去的20年里人们一直着眼于运动并联机床(称为PKM)的开发。
这种技术是指是通过3个或3个以上平行的轴实现X,Y和Z轴的运动,这种结构的刚性、精度十分显著,而且还能保证结构的灵活性和工作区域。
《微动三指串并联机械手指的研究》范文

《微动三指串并联机械手指的研究》篇一一、引言随着科技的进步和人工智能的不断发展,机器人技术已成为现代工业、医疗、服务等领域的重要支柱。
其中,机械手的研发和应用,特别是其手指部分,直接关系到机器人的操作能力和灵活性。
本文将重点探讨微动三指串并联机械手指的研究,分析其结构、运动原理及优势,为相关领域的研究和应用提供参考。
二、微动三指串并联机械手指的结构与设计微动三指串并联机械手指是一种多关节、多自由度的机械结构,具有高度的灵活性和操作性。
该结构主要包括三个相互独立的机械指以及相应的驱动、控制系统。
每个机械指由多个串联和并联的关节组成,这些关节在微动力的驱动下,可以产生精确的位移和动作。
设计上,微动三指串并联机械手指采用了轻质、高强度的材料,以降低整体重量和提高负载能力。
同时,为了实现精确控制,该结构还配备了高精度的传感器和控制系统,可以实时监测和调整每个关节的位置和速度。
三、运动原理与优势微动三指串并联机械手指的运动原理基于串联和并联机构的运动学原理。
在微动力的驱动下,各个关节之间相互协调,使机械指能够完成复杂的动作。
与传统的机械手相比,微动三指串并联机械手指具有以下优势:1. 高灵活性:由于采用了多关节、多自由度的设计,该机械手指可以完成更加复杂的动作,适应各种不同的操作需求。
2. 高精度:高精度的传感器和控制系统保证了机械手指在运动过程中的精确性和稳定性。
3. 负载能力强:采用轻质、高强度的材料,使机械手指在保证灵活性的同时,也具有较高的负载能力。
4. 适应性强:微动三指串并联机械手指可以通过串并联机构的组合和调整,适应不同尺寸和形状的物体,提高操作效率。
四、应用领域微动三指串并联机械手指具有广泛的应用前景,主要应用于以下几个方面:1. 工业领域:在自动化生产线中,微动三指串并联机械手指可以代替人工完成高精度、高难度的操作任务,提高生产效率和产品质量。
2. 医疗领域:在医疗机器人中,该机械手指可以用于辅助医生进行手术操作,提高手术的精确性和安全性。
三爪联轴器的使用场合

三爪联轴器的使用场合
三爪联轴器是广泛应用在各种机械设备中的一种连接器件。
其主要作用是将两个轴连接在一起,并且能够传递旋转力矩。
三爪联轴器具有结构简单、安装方便、使用可靠等优点,因此被广泛应用于机械设备中。
三爪联轴器适用于以下场合:
1. 传动精度要求高的场合:三爪联轴器的结构紧凑,能够提供较高的传动精度,因此适用于传动精度要求高的场合,如数控机床等。
2. 高速传动场合:三爪联轴器的结构设计使其具有高速传动的能力,因此可用于高速传动场合,如风力发电机等。
3. 承受较大旋转力矩的场合:三爪联轴器由于其结构紧凑,连接紧密,能够承受较大的旋转力矩,因此适用于承受较大旋转力矩的场合,如印刷机等。
4. 环境要求严格的场合:三爪联轴器可以根据不同的环境要求进行材料选择及表面处理,如防腐、防震、耐高温、耐磨等,因此适用于环境要求严格的场合,如化工设备等。
总之,三爪联轴器在机械设备中的运用十分广泛,能够满足各种不同的连接要求,提高机械设备的传动效率和使用可靠性。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( )一 次性 装 夹 完 成 多面 加 工 2
机 床 的 灵 活性 很 强 ,其主 轴 矢 量 方 向可 以 覆盖 空 间
关节的 回转运动均采用轴承 ,没有球铰链 ,故关节
点结构简单 , 制 造 容 易 , 精 度保持性好 , 维 修 方 便 。 图2 所 示 为 关 节 点 结构示意 图, 回 转 座 2 过 通
轴 承 1 6 水 、 绕 平 轴 旋 转 , 电 动 机 座 4通 过 轴 承 3、 5 竖 绕
( )应用 灵活 4
三支脚并联机床既 可设计成
常规加工中心 ,又可安装于龙门架上 ,或装置于行 走轨道上 ,以小加 工大 ,加工精度均 由并联结构 自
身 保 证 ,即 根 据 用 户的 需 要 设 计不 同 的结 构 形 式 满
足 用 户加 工 需要 。
示 为 支 脚进 给 传 动示 意 图 。三 支脚 并 联机 床 的 所 有
难于 制 造 ,使其 成 为 所有 并 联 机 床 的突 出问题 ,三 支脚 并 联 机床 成 功 解 决 了这 一 技 术难 题 ,其 关节 点
的任意方向,这种独特 的性能使得并联机床从理论
上 能 够 在 一次 装 夹 便 可加 工工 件 的所 有 面 ,能够 在
一
次装夹内便可完成5 ( 面 甚至6 面)的加工 ,轻松
一
触 。 ④为 保证 支 撑 工作 时 的稳 定 ,我们 设 计 了 定位 伸 缩杆 。伸缩 杆 可 随 着工 件 的调 节 上 下移 动 ,避 免 了工件 的 左右 摇摆 。
般 件 我们 采 用 三 只千 斤顶 进 行调 节 ,但 我 们经 常
对一 些 圆形 工件 感 到 束 手 无策 。我 们 曾 经采 用V形
机 床 7 件 7 装 附 I
ieT osAc e s re/ x u e n o l / c so isFit r
三
支脚并联运动机床的特点 及典型应用
四川长 征机床 集 团有 限公司 ( 自贡 63 0 ) 杨 4 0 0 科 黄 刚强
按杆 系分 ,并联机床有6 、4 、3 杆 杆 杆等 多种 杆系并联结构 ,其 中3 杆并联机 床习惯上 叫三支脚 并联运动机床。并联机床球铰链关节点结构复杂、
为此 我 们将 螺 母设 计 为转 轴 。 为使 调 节螺 栓 转动 省
此 工具 使用 后 提 高 了划 线 的 效率 ,在 对 角 尺时 特 别 方便 ,工件 置 于夹 具 上 特 别稳 ,特 别安 全 ,值
参 属
冷工 加
w ww m e o wo k n 9 0c m , t l r #K1 5 .o
2: 磷 5 (辱警 4 1
/工 裳
s is x or e/ Fit
简便的划线调节架
江苏龙源风 力发 电有 限公 司 ( 南通 2 6 0 ) 张葛军 2 0 0
在生 产 的 过 程 中 ,一 些复 杂 的 工件 由于制 造 的 误差 及 加 工的 需要 在加 工前 通 常要 进 行划 线 ,对 于
1 . 丝杆
2 三支脚并联运 动机床的典型应 用 .
( )常规 加 工方 式 的 5 ( 至 6 的 加 工 加 1 面 甚 面)
工如 图3 所示的汽车零件 ,按传统加工方案需要 多
次 装 夹 ,设 计 多套 工 装 ,若 用 并 联机 床 加 工 ,可 以 实 现 一 次 装 夹 完 成 所 有
完 成 各种 复 杂加 工 与 复 合 角度 加 工 。 () 敏捷 加 工 在 机床 上 使 用 测头 并 结 合5 3 轴 并 联 机 床高 速 运 动 性能 ,在 加 工前 几 秒 内 即可 测 完 工 件 ,建 立 新 的工 件 坐标 系 ,实现 敏 捷加 工 。
完全使用轴承联接 ,没有球铰链 。
图1支脚进 给传动
2 . 联轴器 3 服 电动机 伺
加工 。
( ) 大 型 、超 大 2 型零 件加 工 大 型 、 超
大 型 零 件 的 加 工 按 传 统 加 工 方 式 需 要 比 零 件 更 大 的 机 床 进 行 加 工 ,若 使 用 并 联 机 床 加 工 可 以 图3 汽车零件并联机床加工 轻 松 解 决 ,实 现 以 , Di ' i J c , 工 大 的 目的 。加 工大 型 板 件 ,由于 工 件 自身有 一 定
l
调节两只螺栓可使工件平行升降,单独调节其 中一
只螺 栓 可使 工 件的 中心 线发 生偏 移 ( 于 划 线时 调 便
划线调节架
1 . 底座 2 调节螺栓 3 V . . 形支撑板 4定位伸缩杆 5转轴 . .
整 )。③调节 一只螺栓可使两 只转轴 的水 平距离 发生变化 ,即调节螺栓对底板的倾斜度发生改变 ,
1 三支脚并联运 动机床的特点 .
( )使用传统传动结构实现并联机床传动 并 1
联机 床 的 三个 支脚 的直 线 传 动 方式 与通 用 机床 的 传 动 完 全 一 样 ,即伺 服 电动 机 通过 弹 性 联 轴 器直 接 带
动 丝杆 进 给 ,其 导 轨 为普 通 滚柱 直 线导 轨 ,图 1 所
铁进行支撑 ,但在进行调节时很不方便且不安全 。
为此 我们 通 过 实践 设 计 了一 种划 线 调节 工 具 ,此 工
2 Βιβλιοθήκη 具使用起来方便安全。 划线调节架 由底座 、调节 螺栓 、V 形支撑板 、 定位伸缩杆及转轴等组成 ,如附图所示 。其设计原
理 为 : ①V 支 撑板 特 别 适 用 于支 撑 圆形 工件 。 ② 形
直 轴 旋 转 , 这 样 电动机 座4 就 形 成 了 球 铰 链 的 万 向旋 转 功 能 。
图2 关节点结构
1 、5 . 、3 、6 轴承 2 转座 4电动机座 周 .
的扭 曲,按传统的方式加工极 为困难 ,甚至无法加 工 ;应用并联机床则很轻 易完成这项工 作。如 图4