滚筒式城市道路栅栏清洗机设计
护栏清洗机开题报告.
[4]罗尔娟.智能型多功能清洁车研发[J].山西交通科技.2015(05):106
[5]王忠良,李景春.车辆及高速公路护栏清洗设备的现状与展望[J]业学院学报:3
[6]高根树,秦娜,陈诚.道路护栏机械清洗刷具技术研究[J].建设机械技术与管理,2013,26(12):76-78.
目前马路护栏多数是用人工清洗,劳动强度较大,清洗效率较低。偶尔也有个别地方在洒水车的侧面或前面加上一个可以低速旋转的毛刷在喷淋情况下刷洗护栏,但是毛刷不能横向移动,也不能升降运动,所以刷洗面很有限,刷洗效果也欠佳。道路上白天车流量很大,人工清洗护栏不安全且影响交通,一般在晚上车流量相对较小时清洗,而晚上清洗时经常有发生车撞环卫工人的事故[3]。所以迫切需要解决好护栏的清洗问题。
1)研究背景及意义
马路作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。现在由于城市内车用,而它的作用不仅在于维持良好的交通秩序,提高公路交通的安全性,也是城市景观的重要组成部分[1]。在护栏的使用过程中,由于车辆的尾气排放、风沙雨水侵蚀及其它自然或人为原因,护栏表面会出现灰尘污染,久而久之还会出现结垢,其不仅会使护栏标志不洁而失效,更容易造成交通事故,而且也会使其失去美观,影响路容路貌[2]。护栏的清洗不仅提升城市的市容市貌,也延长了护栏的使用寿命。
3、随着工程机械智能化的发展。各种交通运输工具及设施的清洗设备发展方向必将朝着智能化发展[10]。
3)参考文献
[1]顾大强.新型高速公路护栏清洗装置设计.世界科技研究与发展,2008(05):3-4
[2]李永胜.公路用防撞护栏清洗车作业效率及配置数量分析[J].山西交通科技,2009(02):66-67.
机械设计毕业设计说明书马路护栏清洗机的设计
湖北工业大学毕业设计说明书题目:马路护栏清洗机学院:机械学院专业:机电一体化学号: 1010100406姓名:熊飞指导教师:王海涛完成日期:2014年5月湖北工业大学毕业论文(设计)任务书论文(设计)题目:马路护栏清洗机学号:1010100406姓名:熊飞专业:机电一体化指导教师:王海涛系主任:李奕一、主要内容及基本要求1:了解城市街道护栏清洗机的原理及其设计:2:CAD绘图设计,要求A0图纸一张,总共达到两张A0。
3:说明书,要求8000字以上,要求内容完整,计算准确:4:外文翻译3000字以上,要求语句通顺。
二、重点研究的问题1:马路街道护栏清洗机结构的设计:2:马路街道护栏清洗机工作原理的选型四、应收集的资料及主要参考文献[1]任伯森.中国机械式清洗设备发展概况[J].中外清洗设备及配套产品重点厂商名录.1999,1 :5 -7[2]喻乐康,左东晓.机械清洗的技术发展[J]建设机械技术与管理.1999,1: 30 -32[3]张福恩、吴乃优.交流调速电梯原理、设计及安装维修[M].北京:机械工业出社.1999[4]余锡存、曹国华.单片机原理及接口技术[M].西安:西安电子科技大学,2000[5]刘竞成.交流调速系统[N].上海:上海交通大学出版社,1984[6] ELEVATER WORLD[J], U.S.A: ELEVATER WORLD. INC. 1981^1989[7]B .K.博瑟.交流调速系统[Nu].姚承三等译.北京;煤炭工业出版社.1986[9]PhilipsRS ,ElectricL ifts[M].London:Sir LsaacP itman&SonsLtd,1996[10]高健.机械优化设计基础[M].北京:科学出版社,2000.湖北工业大学毕业论文(设计)评阅表学号1010100406 姓名熊飞专业机电一体化毕业论文(设计)题目:马路护栏清洗机湖北工业大学毕业论文(设计)鉴定意见学号:1010100406 姓名:熊飞专业:机电一体化毕业论文(设计说明书)27 页图表 6 张目录第一章研究背景及发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1一研究背景‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1二发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 21 成型产品介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 22 技术差距‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 6第二章结构设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 8一工作原理及主要机构‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 8二设计要求‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 12三方案讨论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 13第三章设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 14一刷子的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 14二电动机的选定‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 16三支撑导槽的设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 18四液压泵的选择‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 20五带轮传动设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 22结论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 24设计体会‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 24致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 25参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 26第一章城市道路护栏清洗车的研究背景发展概况一研究背景管理设施作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。
滚筒清扫车毕业设计[管理资料]
![滚筒清扫车毕业设计[管理资料]](https://img.taocdn.com/s3/m/86986ab2a8956bec0875e357.png)
毕业设计滚筒清扫车设计学生姓名:指导教师:何宝芹专业名称:机械设计与制造所在院系:机械工程系2012年5月目录摘要................................................ Abstract. (I)第一章前言 0 0 0 (1)第二章设计任务书 (2) (2) (3)第三章方案设计 (4)传动方案的比较 (4) (7) (8) (9) (9) (10) (12)第四章各部分参数设计 (14) (14) (14)(主轴)强度校核 (14)第五章结论与建议 (17)致谢 (18)参考文献 (19)摘要针对目前环卫、保洁人员劳动强度大,效率低下,工作时间长等问题,而目前市场上没有出现比较成熟、实用的适合环卫工人使用的产品,我们设计了一种实用、简便的XX扫地车。
该扫地车可以对路面,广场等较平坦的场地进行快速,高效的清扫,而且不需要其它动力,具有较强的适应性。
我们在车上设计一个多排毛刷的滚筒配合一个大半个圆的弧形铲子可以将垃圾迅速扫起,只需扫地车前进这一个动作即可实现对地面垃圾的收集清扫工作。
垃圾车上还设计有连杆机构可实现调节前面万向轮的高度同时控制离合器离合滚筒两个动作,可以使扫地车在不清扫时使滚筒离地的同时和链轮离合,这样方便使用者在不用的时候轻松移动扫地车。
车轮上还有棘轮配合上万向轮的调高,可随意的后退而不带到垃圾,实现多次清扫。
而在垃圾特别多的时候,车上的压缩装置可以增加扫地车的装载量,进行更持久的清扫。
关键词:离合器,连杆机构,链轮,棘轮,多次清扫AbstractIn view of the current environmental sanitation, maintenance staff labor intensity, the efficiency is low, the working time is long, and does not appear on the market at present is mature, practical for the sanitation workers use the product, we design a practical, simple XX sweep the floor car. The car to sweep the floor can be road, square are flat area for rapid, efficient cleaning, and don't need other power, and has strong adaptability. We in the car design more than a row of roller brush with a half round arc can be quickly and shovel garbage up, just sweep the floor front into this action can be realized to the ground litter collection cleaning work. The car also design a garbage can realize linkage mechanism adjust the height of the front wheel universal and the control of clutch clutch roller two action, can make sweeping the floor in not cleaning the car when the drum of from the ground at the same time and sprocket loss, so convenient users when you are not easily in mobile sweep the floor car. On the wheel and ratchet wheel with the adjustable to tens of thousands of high, can optional back and not to waste, and realize the sweeping many times. And in the waste much more special, the compression device can increase the sweeping the floor of the car carrying quantity, for more lasting clean up.Keywords::Clutch,linkage mechanism,ratchet wheel,sprocket。
护栏清扫车课程设计

护栏清扫车课程设计一、课程目标知识目标:1. 学生能理解护栏清扫车的基本结构及其工作原理,掌握相关科学术语。
2. 学生能描述护栏清扫车在清洁工作中的重要性和应用场景。
3. 学生能概述护栏清扫车的研发背景,了解其在我国城市环境卫生管理中的作用。
技能目标:1. 学生通过观察、讨论,培养分析和解决问题的能力。
2. 学生能运用所学的知识,设计出一种简易的护栏清扫车模型。
3. 学生通过小组合作,提高沟通、协作和动手制作能力。
情感态度价值观目标:1. 学生培养对科技创新的兴趣,激发学习科学、探索未知的热情。
2. 学生意识到环境保护的重要性,增强社会责任感和环保意识。
3. 学生通过课程学习,树立团队协作意识,培养积极向上的学习态度。
分析课程性质、学生特点和教学要求:本课程为科技制作课,针对五年级学生设计。
此年龄段学生好奇心强,动手能力逐渐提高,具备一定的科学知识和技能。
课程要求教师结合学生特点,运用启发式教学,引导学生主动探索、实践,将理论知识与实际应用相结合。
通过课程目标的设定,使学生在掌握知识、技能的同时,培养情感态度价值观,达到全面发展的教育目标。
后续教学设计和评估将围绕课程目标展开,确保学生实现具体的学习成果。
二、教学内容1. 护栏清扫车的基本结构:- 护栏清扫车的组成部分及各部分功能- 对比分析不同类型的护栏清扫车结构特点2. 护栏清扫车的工作原理:- 清扫装置的工作原理- 传动系统和控制系统的作用及原理3. 护栏清扫车的应用场景与意义:- 城市环境卫生管理中的重要作用- 护栏清扫车在使用过程中的优势与局限4. 护栏清扫车的研发背景:- 国内外护栏清扫车的发展历程- 我国在护栏清扫车领域的研究成果5. 简易护栏清扫车模型设计与制作:- 设计原则和步骤- 制作材料选择与加工方法- 小组合作完成模型制作与调试教学大纲安排与进度:第一课时:护栏清扫车的基本结构及功能第二课时:护栏清扫车的工作原理第三课时:护栏清扫车的应用场景与意义第四课时:护栏清扫车的研发背景第五课时:简易护栏清扫车模型设计与制作(1)第六课时:简易护栏清扫车模型设计与制作(2)第七课时:简易护栏清扫车模型展示与评价教学内容与课本关联性:本教学内容与科学课本中《生活中的科技》章节相关,结合课本内容,让学生了解和掌握护栏清扫车的基本知识,培养学生的科技创新意识和动手实践能力。
滚筒式清洗机设计说明书

目录摘要 (1)关键字 (1)引言. (1)1 清洗机的概况及现状分析 (2)1.1概况 (2)1.2现状分析 (2)2 清洗机的结构及工作原理 (3)2.1结构 (3)2.2工作原理 (4)3 设计方案的确定 (4)3.1 原始资料、数据 (4)3.2任务 (4)3.3 设计方案选择 (4)4 运动和动力参数的设计计算 (6)4.1 物料在倾斜滚筒面上的运动及其运动轨迹 (6)4.2滚筒材料及驱动方式的选择 (9)4.3功率的计算及电动机的选择 (10)4.3.1功率的计算 (10)4.3.2 电动机的选择 (12)4.4 传动比及动力参数的计算 (13)4.4.1 传动比的分配 (13)4.4.2 传动装置的运动和动力参数的计算 (13)5 零部件的设计和标准件的选用 (13)5.1 轴的设计计算 (14)5.1.1 初算轴的直径 (14)5.1.2 初选轴的形式 (14)5.1.3轴的结构的设计 (14)5.1.4 轴的强度校核 (15)5.1.5择轴和联轴器的键 (17)5.2 滚筒结构的设计 (19)5.3 联轴器的计算及选择 (20)5.3.1 联轴器的选用 (20)5.3.2轴器的型号和主要尺寸 (20)5.4 滚动轴承及轴承座的选择 (21)5.4.1 类型选择 (21)5.4.2型号选择 (21)5.4.3 轴承的结构和定位方法 (23)5.4.4滚动轴承润滑和密封 (23)5.4.5滚动轴承座的选择及其配置 (23)5.5 减速器的选择 (24)6 电气控制 (24)致谢 (26)参考文献 (26)滚筒式清洗机设计06机电技术教育(3)班:袁计划指导老师:李立和摘要:本设计基于清洗机械的研究现状和发展状况,根据清洗机的类型、结构和工作原理,结合相关设计手册,通过对清洗机工艺参数及动力学参数的选择计算,电动机的选择,联轴器的选择,并专门设计了淤泥清理口,对方便清除水池里来自马铃薯身上的淤泥起到很大作用,以完成完善清洗机的总体设计。
城市道路护栏清洗车设计

目录第一章研究背景及发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1一研究背景‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1二发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 11 成型产品介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 技术差距‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥8第二章课题分析‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10一工作原理及主要机构‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10二设计要求‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12三方案讨论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥121 底盘选用及整体布局方案‥‥‥‥‥‥‥‥‥‥‥ 122 传动方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥173 运动机构方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥224 纠偏系统方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥22第三章设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25一刷箱及刷子的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25二液压系统的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥29 1液压马达的选用‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥302 液压缸的选用‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥303 液压泵的选择‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥324链传动设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥33三供水系统设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥35四油箱设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥36五拟定液压系统执行方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥39结论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥41设计体会‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥41致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥42参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥43第一章城市道路护栏清洗车的研究背景发展概况一研究背景管理设施作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。
机械设计毕业设计说明书马路护栏清洗机的设计
湖北工业大学毕业设计说明书题目:马路护栏清洗机学院:机械学院专业:机电一体化学号: 1010100406姓名:熊飞指导教师:王海涛完成日期:2014年5月湖北工业大学毕业论文(设计)任务书论文(设计)题目:马路护栏清洗机学号:1010100406姓名:熊飞专业:机电一体化指导教师:王海涛系主任:李奕一、主要内容及基本要求1:了解城市街道护栏清洗机的原理及其设计:2:CAD绘图设计,要求A0图纸一张,总共达到两张A0。
3:说明书,要求8000字以上,要求内容完整,计算准确:4:外文翻译3000字以上,要求语句通顺。
二、重点研究的问题1:马路街道护栏清洗机结构的设计:2:马路街道护栏清洗机工作原理的选型四、应收集的资料及主要参考文献[1]任伯森.中国机械式清洗设备发展概况[J].中外清洗设备及配套产品重点厂商名录.1999,1 :5 -7[2]喻乐康,左东晓.机械清洗的技术发展[J]建设机械技术与管理.1999,1: 30 -32[3]张福恩、吴乃优.交流调速电梯原理、设计及安装维修[M].北京:机械工业出社.1999[4]余锡存、曹国华.单片机原理及接口技术[M].西安:西安电子科技大学,2000[5]刘竞成.交流调速系统[N].上海:上海交通大学出版社,1984[6] ELEVATER WORLD[J], U.S.A: ELEVATER WORLD. INC. 1981^1989[7]B .K.博瑟.交流调速系统[Nu].姚承三等译.北京;煤炭工业出版社.1986[9]PhilipsRS ,ElectricL ifts[M].London:Sir LsaacP itman&SonsLtd,1996[10]高健.机械优化设计基础[M].北京:科学出版社,2000.湖北工业大学毕业论文(设计)评阅表学号1010100406 姓名熊飞专业机电一体化毕业论文(设计)题目:马路护栏清洗机湖北工业大学毕业论文(设计)鉴定意见学号:1010100406 姓名:熊飞专业:机电一体化毕业论文(设计说明书)27 页图表 6 张目录第一章研究背景及发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1一研究背景‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1二发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 21 成型产品介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 22 技术差距‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 6第二章结构设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 8一工作原理及主要机构‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 8二设计要求‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 12三方案讨论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 13第三章设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 14一刷子的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 14二电动机的选定‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 16三支撑导槽的设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 18四液压泵的选择‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 20五带轮传动设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 22结论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 24设计体会‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 24致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 25参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 26第一章城市道路护栏清洗车的研究背景发展概况一研究背景管理设施作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。
护栏清洗车滚刷规避机构的设计计算
滚刷轴心的反 作用力 Q 立刻减 小, 与之 相对应由 式 ( 1) 确定的力 F 值也会随之减小。
规避机构在其两端的作用力 F 值小于标准值( 如
前面计算所得 23. 5 kg ) 后, 就会迅即产生收缩, 使其 长度改变为 l - $ l1, 如图中 B1C 所示。此时, 转臂受规 避机构的拉动而回转, 到达 A 1O 的位置。显然这一作 用的结果使 h 也产生了负位移, 向护栏板靠近了 $ h1,
陈克鸿1, 焦生杰2
( 1. 广东省 能达高速公路工程有限公司, 广东 花都 510800; 2. 西安公路交通大学 筑路机械系, 陕 西 西安 710064)
摘要: 介绍了一种流量比例放大控制器的设计方法、电 路结构与工作原理, 该控制器简单、实用、方便。 关键词: 比例放大控制器; 液压系统 中图分类号: T M 571. 5; T H138. 522 文献标识码: A 文章编号: 1000-033X ( 1999) 06-0007-03
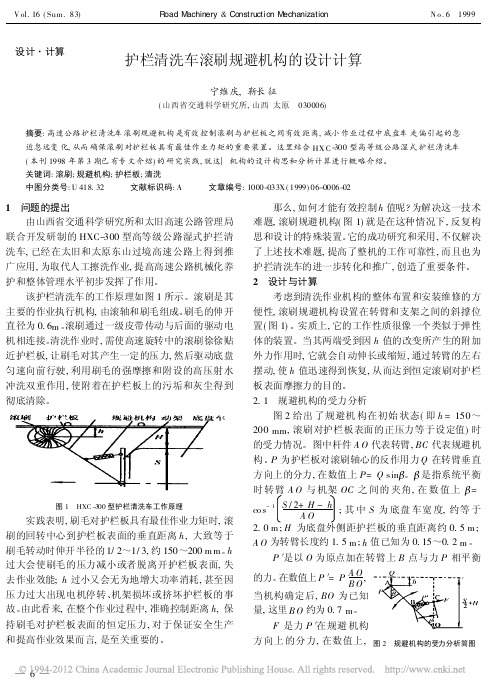
图1hxc2300型护栏清洗车工作原理实践表明刷毛对护栏板具有最佳作业力矩时刷的回转中心到护栏板表面的垂直距离h大致等于刷毛转动时伸开半径的约150200mmh过大会使刷毛的压力减小或者脱离开护栏板表面过小又会无为地增大功率消耗甚至因压力过大出现电机停转机架损坏或挤坏护栏板的事故
V ol. 16 ( Sum. 83) Road Machinery & Constructi on Mechanization N o . 6 1999
的正压力为 20 kg, 即 Q= 20 kg 。
这里的力 F, 就是在初始状态下作用于规避机构 而与力 P 相平衡的力。它的数值计算结果, 是设计规 避机构的重要依据。
根据以上给出的已知条件, 我们可以进行下面的 简单运算:
城市道路钢护栏清洗车设计与研制
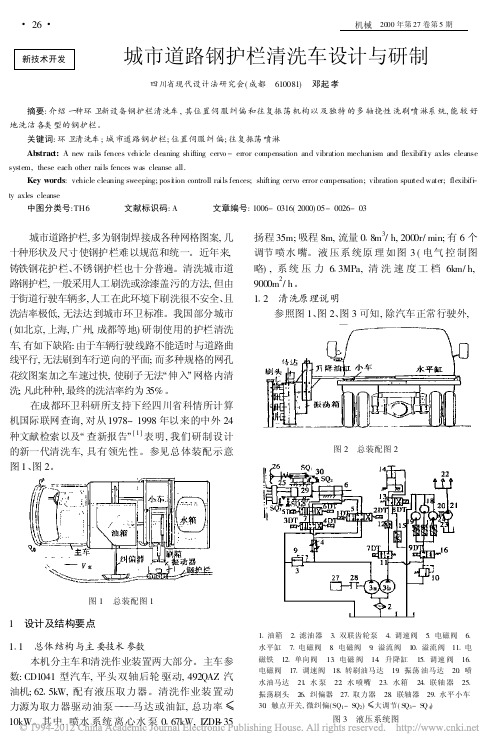
新技术开发城市道路钢护栏清洗车设计与研制四川省现代设计法研究会(成都 610081) 邓起孝摘要:介绍一种环卫新设备钢护栏清洗车,其位置伺服纠偏和往复振荡机构以及独特的多轴挠性洗刷喷淋系统,能较好地洗洁各类型的钢护栏。
关键词:环卫清洗车;城市道路钢护栏;位置伺服纠偏;往复振荡喷淋Abstract:A new rails fences vehicle cleaning shifting cervo -error compensation and vibration mechanism and flexibifi ty axles cleanse system,these each other rails fences was cleanse all.Key words :vehicle cleaning sweeping;posi tion controll rails fences;shifting cervo error compensation;vibration spurted water;flexibif-i ty axles cleanse中图分类号:TH6 文献标识码:A 文章编号:1006-0316(2000)05-0026-03城市道路护栏,多为钢制焊接成各种网格图案,几十种形状及尺寸使钢护栏难以规范和统一。
近年来,铸铁钢花护栏、不锈钢护栏也十分普遍。
清洗城市道路钢护栏,一般采用人工刷洗或涂漆盖污的方法,但由于街道行驶车辆多,人工在此环境下刷洗很不安全、且洗洁率极低,无法达到城市环卫标准。
我国部分城市(如北京,上海,广州,成都等地)研制使用的护栏清洗车,有如下缺陷:由于车辆行驶线路不能适时与道路曲线平行,无法刷到车行逆向的平面;而多种规格的网孔花纹图案加之车速过快,使刷子无法/伸入0网格内清洗;凡此种种,最终的洗洁率约为35%。
在成都环卫科研所支持下经四川省科情所计算机国际联网查询,对从1978~1998年以来的中外24种文献检索以及/查新报告0[1]表明,我们研制设计的新一代清洗车,具有领先性。
滚筒式清洗机的设计

滚筒式清洗机的设计任务书1.课题意义及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,深入了解滚筒式清洗机的工作原理和设计等方面的方法及设计思想等内容,为学生在毕业后从事工作打好基础。
2.主要内容(1)滚筒式清洗机总体结构方案和传动系统设计。
(2)进行结构分析和设计计算(3)绘制装配图和零件图3.主要参考资料[1] 孙桓,陈作模.机械原理[M].北京:高等教育出版社.1996.[2] 吴宗泽. 机械设计实用手册[S].化学工业出版社.2003.[3] 陈旭俊.工业清洗机及清洗技术[M].化学工业出版社.2005.4.进度安排审核人:年月日滚筒式清洗机的设计摘要:本次设计是就当前的国内外清洗机的发展现状及其未来的发展趋势的前提下,结合自身在大学期间所学的关于机械方面的知识,并查阅相关的资料,首先通过确定清洗机所需要满足的生产条件和生产时的功率、效率等要求,确定出清洗机的主体部分滚筒的大小尺寸及材料的的选择,通过设计加肋条满足筒体的刚度和强度要求,然后通过比较论证几种常见的减速器装置,确定出适合本次设计的最佳选择。
其次,通过计算筒体所需满足的转矩要求,初算出轴的直径,然后确定出本次设计合适的联轴器的型号,然后查阅资料确定出本次设计所需要的滚动轴承的型号,然后设计轴为阶梯轴,通过与其他元件的连接,确定出阶梯轴的尺寸大小。
然后通过整体的分析确定整个清洗机的结构,通过与实际的工作情况相结合,最终确定方案。
关键词:滚筒式清洗机滚筒清洗机减速器联轴器轴The design of the drum washing machineAbstract:The advantages of this design is the current domestic and foreign development present situation and future trend of the development of the premise, combined with their own learned in college of mechanical knowledge, and access to relevant data, first through the determination of cleaning machines needed to meet the production conditions and productionof power, efficiency requirements, such as the size of the main body of the washing machine drum and the selection of materials, through the design with rib, satisfy the requirement of the cylinder stiffness and strength, and then through comparison of several common reducer device, the best choice to determine the suitable for the design. Secondly, through the calculation of torque of cylinder needed to meet the requirements, work out at the beginningof shaft diameter, and then identify the appropriate coupling model design.Keywords: drum washing machine,drum,cleaning machine,reduce,coupling,shaft.目录1 引言...................................................................... I I 1.1现状. (2)1.2发展趋势 (2)2 滚筒式清洗机的主要结构和工作原理 (4)2.1结构 (4)2.2工作原理 (4)3 清洗机传动方式的确定 (5)3.1 清洗机工作需满足的条件 (5)3.2 设计方案选择 (5)4 马铃薯在滚筒内的运动轨迹及滚筒的倾斜角度计算 (9)4.1 马铃薯在清洗机内的运动轨迹 (9)4.2 滚筒筒体材料及滚筒转动方式的确定 (12)4.2.1 滚筒筒体材料的确定 (12)4.2.2滚筒筒体最小壁厚计算 (12)4.2.3 滚筒转轴运动方式的确定 (13)4.3 功率的计算 (13)4.4电动机的选择 (16)4.4.1电动机功率的选择 (16)4.4.2 确定电动机的转速 (16)4.4.3 电动机的型号的确定 (16)4.5传动比和清洗机的工作转速的计算 (16)4.5.1 传动比的分配 (16)4.5.2滚筒式清洗机的工作转速的确定 (17)5 清洗机轴的设计及校核和其他零件的的确定 (18)5.1 轴的设计计算 (18)5.1.1 初算轴的直径 (18)5.1.2 初选轴的形式 (19)5.1.3 轴结构的确定 (19)5.1.4 轴的强度校核 (20)5.1.5 键的选择 (23)5.2 清洗机整体的结构设计方案 (25)5.3 联轴器的类型及型号尺寸 (26)5.3.1 联轴器类型的确定 (26)5.3.2 联轴器型号和尺寸的选择 (26)5.4 确定滚动轴承和轴承座的设计方案 (27)5.4.1 滚动轴承类型确定 (27)5.4.2 滚动轴承型号的确定 (28)5.4.3 滚动轴承的结构及定位设计 (29)参考文献 (31)致谢 (32)总结 (3)31 引言随着我国人民生活水平的提高,人们开始越来越注重对蔬菜水果的清洗质量,所以在我国为适应人们的需要清洗行业快速发展起来。
城市道路护栏清洗机的研制
机电一体化技术城市道路护栏清洗机的研制韦尧兵,聂 萌,陈 祯,曹 勇(兰州理工大学机电工程学院,甘肃兰州730050)Development of Urban Road Guardrail Cleaning M achineWEI Yao bing,NIE Meng,CHEN Zhen,CAO Yong(Schoo l o f M echanical and Electrica l Eng ineering ,L anzhou U niver sity of T echno lo gy ,L anzhou 730050,China)摘要:针对城市道路护栏难以清洗的现状,提出了一种龙门框架分离式护栏清洗机本体结构,作业时清洗机跨立在护栏上,实现对护栏和支墩的全面清洗.根据该清洗原理,建立了栏杆和支墩的清洗模型,并对其清洗过程进行了运动分析,同时对清洗机的机械结构和电器控制进行了阐述.该清洗机具有结构简单,操作方便,自动化程度高等优点.关键词:护栏清洗;龙门框架分离式结构;支墩;控制系统中图分类号:T H 166文献标识码:A 文章编号:10012257(2011)04003004收稿日期:20101118Abstract:Based on the difficulties of how to clean the urban road guar drails,a desig n of road guardrails cleaning machine body is pro posed,w hich adopts the gantry separ ate fr am e str ucture,the machine crosses in the guar drails w hen it w orks,to achieve g uardrails and pedestals are com pletely w ashed.Acco rding to this cleaning princi ple,the w ashing m odel of g uardrail and pedestal is established and the cleaning process is analy zed,and mechanical structur e and electrical co ntrol o f the m achine are descr ibed,the machine has charac teristics of sim ple structure,easy operation and hig h degr ee o f automation,and so o n.Key words:guar drails cleaning;separate desig n fram e structure;pedestal;contr ol system0 引言我国城市交通发展迅速,公路护栏由于受车辆的尾气、灰尘粘附及其它因素影响,表面出现了不同程度的污染,影响到市容市貌[1].目前,针对城市道路中间用的隔离护栏的清洗方式主要有2种:人工清洗和借助汽车所配高压水洗刷清洗.但人工清洗劳动强度大,清洗效率低;且由于清洗工人身处高速行驶的机动车辆中间,极易发生安全事故;周围空气中汽车尾气浓度很高,严重危害清洗工人的健康.车载式高压水洗刷清洗一次性投入过高,一般中小城市难以承受;且由于车辆行驶路线不能保证与道路护栏平行[2],无法清洗护栏处在车行逆向的部分表面;耗水量大,清洗效果不佳,对城市交通也有一定影响.护栏清洗机结合护栏的结构特点而设计,以护栏本身为导轨,结构简单、成本低、无污染,且能够实现对支墩的清洗,与我国高等级公路养护机械节能、高效、低噪声、低污染且自动化程度高的发展相适应,具有显著的社会环境效益和经济效益.1 机械系统设计针对某市常用护栏的不同结构尺寸,进行了基本数据采集分析,以影响护栏清洗的极限尺寸来建立护栏模,据此分析影响清洗机机械结构设计的基本参数和范围,以满足不同结构尺寸护栏的清洗.具体设计要求:根据道路状况和护栏自身的特点,能够实现即时切入、切出;实现在不停车的情况下对支墩的清洗;洗擦结合,喷头刷洗间歇性供水,减少用量水,同时对部分水进行回收循环利用;自动实现清洗过程,对其前进方向进行微调;工作过程中几乎对道路交通没有影响.1.1 护栏栏杆清洗原理如图1所示,清洗作业时,护栏两对侧面滚刷将护栏栏杆 夹击"在中间,刷毛相互重叠(2~3cm),使两滚刷形成一个整体,中间不留间隙.两滚城市道路护栏清洗机的研制机电一体化技术刷高速旋转,在护栏表面刮擦,同时,沿护栏竖向表面喷水,从而实现清洗.根据分析和实验可得,当两滚刷转向相反时,可使脏物或脏水沿着箭头方向甩出去,两滚刷的刷毛在重叠处移动方向相同,可加快刷子的转速[3],滚刷两边各布置一个喷水嘴,这样可将飞溅的水珠带到护栏板面上,节约用水,达到良好的清洗效果.根据采集所得数据,护栏栅格之间的最大距离是170mm ,最小距离是120m m,护栏所用钢管直径22mm.为了使滚刷与护栏表面有效发生摩擦,利用相切的原理设计滚刷直径(包括毛长),通过分析验证,滚刷直径为260mm 时,清洗效果好,不留清洗死角.图1 护栏栏杆清洗原理1.2 护栏支墩清洗原理支墩清洗机构是机械系统的核心部件之一,采用锥形洗刷呈V 字型悬伸布置,固定于机架两侧面底部,通过洗刷与支墩表面的挤压刮擦实现清洗,由于支墩分布的间断性,运行过程中需要对其进行即时检测,间歇启动电机和供水系统.其设计必须保证强度的可靠性和清洗范围覆盖的全面性.如图2所示,由于锥形洗刷相对于水平方向呈 (25 35 )角度对称布置,故以单侧为例进行说明.锥形洗刷刷毛是由尼龙直丝和波纹丝以梅花图2 支墩清洗原理状分布,清洗机沿如图1所示方向以速度V 前进过程中,尼龙丝受到支墩表面的挤压刮擦发生变形,由于平行于护栏走向的支墩表面与其前行方向一致,能够保证该侧面的彻底清洗.对垂直于行进方向V 的侧面,采用极限半径法进行分析.设L 为尼龙丝的变形,只要保证P 点和O -O 线能够得到清洗,则其它位置都能够被清洗.由于毛长沿轴向方向呈锥形分布,故R 1 L R 2,R 1,R 2分别为最短毛和最长毛.前行过程中,尼龙丝以毛孔为圆心,以毛长为半径发生变形,被包络的面积为能够清洗到的范围,CD 为刷毛包络的极限位置,则阴影部分为无法清洗的部分,占整个支墩表面积的不到1%,同时由于e >0,刷毛不会与地面发生刮擦,故能够达到清洗效果.1.3 机械系统总体结构设计如图3所示,清洗机由机械连接件通过间距调隙部件对称组成,呈龙门框架分离式结构,两部分都具有各自的驱动系统与执行系统.工作时,将A -B 两单车快速拼装由主控芯片统一控制,使之跨立于护栏之上,洗刷部件和擦洗部件由洗刷电机通过V 带传动在护栏两侧面做盘旋式前进运动,滚刷两边竖向布置喷水嘴,两支墩清洗机构呈V 字型布置,水泵间歇向栏杆和支墩表面喷洒雾状水花.图3 道路护栏自动清洗机机械结构原理主动轮本身带有动力,其上安装调节销,用来在一定范围内控制主动轮的转向,后轮万向,行进时清洗机以护栏底部横为导轨,导向轮能通过自身的弹簧对车身进行一定程度上的微调来控制其行进方向,同时配合程序的PID 算法差速控制,使得滚刷始终与护栏紧密接触.正常工作状态下辅助支撑收向两单车背离护栏两侧面,当遇到高大障碍时,通过辅助支撑将两部分分离,同时可通过间距隙部件横向调节两单车A -B 间距,实现即时切入、切出.机电一体化技术城市道路护栏清洗机的研制2 控制系统设计2.1 控制系统原理控制系统采用模块化设计,包括主控单片机、协处理器、电源模块、电机驱动模块、调速模块、检测报警模块和显示模块等.整个系统由2个12V,60A 的铅酸蓄电池提供电源,处理器采用MC9S12DG128单片机,主要控制各个组成部分的启动、停车、转速、转向和避障等,采用PID 控制.电机驱动采用2片并联的M C33886芯片,以降低其工作时的导通电阻,增强其驱动能力,从而有效地降低电机频繁的正反转时驱动芯片的发热程度[4].检测装置有红外线检测、超声波测距等,将检测到的相应数据用LED 方式显示,同时提供报警.2.2 电机调速系统系统中电机的调速方法均为PWM 调速.其中2主驱动轮电动机分开进行PWM 调速,以期能实现差速调速来控制和协调2个主电动轮在直道、弯道的行驶速度和方向;考虑到电子元件的散热和驱动能力问题,2洗刷电机也分别进行PWM 调速,但是输入的PWM 信号相同;2支墩洗刷电机也分别进行PWM 调速,输入的PWM 信号也相同;2洗刷清洗液压泵使用同一个PWM 信号调速;2支墩洗刷液压泵使用同一个PWM 信号调速.如图4所示,PWM 信号从光耦4N35的1脚输图4 主驱动轮电机调速原理入,4脚输出,当PWM 信号占空比不为0时,场效应管IRF3205触发,触发时间的长短取决于PWM 信号占空比的大小.开关S 1有3个挡位:上、中、下,当开关S 1处于上挡位时电机正转,当开关S 1处于下挡位时电机反转,当开关S 1处于中挡位时电机不接通.将A/D 模块的参考电压设为0~5V,通过电位器调节此参考电压就能控制PWM 的占空比,电机由此实现调速的目的.如图5所示,在PWM 调速系统中,在电源电压U d 不变的情况下,电枢端电压的平均值取决于占空比的大小,即改变占空比的值可以改变电枢端电压U 0的平均值,从而达到调速的目的[5].图5 电机枢绕组两端的电压波形U 0=t 1/(t 1+t 2) U d =t 1/T U d =T U d (1)式中 T 占空比,0 T 13 软件系统设计系统的软件用C 语言设计而成,采用模块化编程和结构化编程,即将程序分解成若干个小模块,各个模块保持相对的独立性,只靠少量的出入口参数联系,这样使程序的调试、修改、维护都比较方便;各个模块利用严格的转移和调用语句组成一个严密的整体.软件系统主要由主程序、子程序和中断服务程序组成.3.1 主程序设计主程序的基本要求:能够检测到运行前方的障碍物,自动减速停车;出现故障或有紧急交通状况出现时,可遥控实现清洗机的预定动作;当工作负载增大或蓄电池输出电压降低,不能保证正常工作所需时,能够实现报警;即时检测支墩是否出现,调节行驶速度,间歇启动支墩清洗装置和喷水系统等.本自动护栏清洗机有3种工作模式:手动工作模式、智能工作模式和遥控工作模式.主程序如图6所示,主要包括单片机的A/D 转换、PWM 、定时器等模块的初始化,传感器部分PWM 调制信号的使能,A/D 转换通道的使能,在主循环里对A/D 采样数据进行处理,分析得出位置速度信息并对舵机转向和直流电机速度进行调度控制.子程序模块包括I/O 口初始化子程序、定时器子程序、A/D 转换初始化子程序、PWM 初始化子程序、锁相环子程序、速度采样子程序和位置偏差计算子程序等.中断程序包括实时时钟中断处理程序、A/D 转换中断处理程序和输入捕获中断处理程序等.各个模块相对独立又通过一定的参数出入口联系.城市道路护栏清洗机的研制机电一体化技术图6 主程序工作流程3.2 PID 控制算法PID(比例、积分、微分)控制是建立在经典控制理论基础上的一种控制策略.图7为单位反馈的PID 控制原理框图,其中e(t )代表理想输入与实际输出的误差,这个误差信号被送到PID 控制器,控制器对误差信号e(t )分别进行比例、积分、微分运算,其结果的加权和构成系统的控制信号u(t).图7 PID 控制原理设K p 为比例系数;T i 为积分时间常数;T d 为微分时间常数.PID 控制器的数学模型为:u =K pe +1T it0e d t +1T d d e d t(2)u(t)经被控对象获得新的输出信号y (t ),这个新的输出信号被再次送到感应比较器以发现新的误差信号.在实际过程中,由于传感器是按一定间隔周期获取位置信息的,因此必须将连续PID 控制算法离散化,这样可得到数字位置式PID 控制算法,其数学模型为:u i =K e i +TT iij =0e i +T dT(e i -e i-1)+u 0(3)表示的控制算法提供了执行机构的位置U i ,所以被称为位置式PID 控制算法.当执行机构需要的不是控制量的绝对值,而是其增量(如驱动步进电机)时,设e 为引导线偏离车体中轴线的偏差值;K 为比例系数;T 为速度采样周期;T i 为积分环节时间数;T d 微分环节时间常数.由式(3)可推导出数字增量式PID 控制算法为[6]:u i =d 0e i +d 1e i -1+d 2e i -2(4)u i =u i -1+ u i (5)d 0=K 1+T T i +T dT (6)d 1=-K (1+2T dT)(7)d 2=KT d T(8)清洗机行驶速度采用闭环控制,由PID 控制器调节,其输入量为目标速度值与当前速度值的差值,目标速度根据当前的路况信息以及路况更迭信息确定,PID 调节器的输出即为与行进电机转速成比例的数值,经处理后,得到与所需速度相对应的PWM 脉宽信号.4 结束语针对城市道路护栏清洗的难题,设计的机械本体结构为龙门框架分离式结构的自动护栏清洗机,作业时清洗机跨立在护栏之上,以护栏本身为导轨,通过刷洗和擦干实现对护栏栏杆和支墩的全方位自动化清洗.模块化的电器控制系统和多种工作模式的程序控制保证了清洗机的在无人操控下的智能运行,从而在清洗护栏过程中保证了交通顺畅和作业人员的安全.该自动护栏清洗机设计合理,结构简单,操作方便,自动化程度高,可进行推广.机电一体化技术参考文献:[1] 彭南兴.公路护栏清洗装置的开发研制[J].工程机械,2006,37(12):7-9.[2] 黄海兵.新型城市护栏清洗机的开发研究[J].工程机械,2009,32(2):11-13.[3] 吴文杰,陈 赣,顾大强.新型高速公路护栏清洗装置设计[J].世界科技研究与发展,2008,30(10):618-620.[4] 王少锋.竞赛用智能汽车的研究与实现[D].兰州:兰州理工大学,2008.[5] 王 苏.直流电机P WM 调速研究及单片机控制实现[J].自动控制,2008,37(11):82-95.[6] 谢剑英,贾 青.微型计算机控制技术[M ].北京:国防工业出版社,2004.作者简介:韦尧兵 (1965-),男,甘肃靖远人,教授,研究方向为裂纹技术与应力断料装备;聂 萌 (1986-),男,山东泰安人,硕士研究生,研究方向为成套装备及其制造.直线电机气浮精密平台的设计与控制丁亮亮,赵东标,陆永华,范一保(南京航空航天大学机电学院,江苏南京210016)Design and Control of Air Bearing Precision Positioning Stag e Driven by Liner M ot orDING Liang liang,ZHAO Dong biao,LU Yong hua,FAN Yi bao(Co llege of M echanical and Elect rical Eng ineering ,N anjing U niv ersit y of A ero nautics and A str onautics,Nanjing 210016,China)摘要:高精度综合测量仪在工作中要求达到亚微米级的运动精度,为此建立了XZ 直线电机气浮精密运动平台,对气浮导轨设计、直线电机控制等关键技术进行了研究.采用有限元设计法设计了气浮导轨,实验结果表明,采用该方法设计的气浮导轨具有较高的承载能力和刚度.提出一种改进的PID 控制策略,从而改善直线电机运动平台的抗干扰能力,并使其获得较高的稳态位置精度.实验结果显示,在采用这种控制方法后,直线电机气浮精密平台的定位精度可达到0.5 m.关键词:永磁直线同步电机;气浮导轨;平台设计;PID 控制中图分类号:T P133;T P273文献标识码:A 文章编号:10012257(2011)04003404收稿日期:20101123基金项目:航空科学基金资助项目(2008ZE52049)Abstract:The hig hprecision m easuring instrum ent r equired achieving submicro n mo vement,so an X Z air bearing precise positioning stag e driven by liner mo to r w as established.Som e key techniques,including desig n method of aerostatic guide and control of liner motor,w ere studied.T heaerostatic guide w as designed by finite elem ent m ethod.Ex perimental results show that the aero static g uide have high load capability and stiffness.In or der to im pro ve stage s positio ning accuracy,the tracking perform ance and interfer ence rejection of liner motor must be impr oved.So an improv ed PID contro l strategy w as proposed to improve anti inter ference ability and access high position accu racy.Ex perimental results show that in using this contro l m ethod,the positioning accuracy can reach 0.5 m.Key words:liner m otor;aerostatic guide;str uc tur e desig n;PID contr ol0 引言作为检测装备的核心部件之一,精密运动平台的运动精度性能要求也越来越高,如在高精度测量仪中的运动平台都要求达到亚微米级的运动定位精度[1].由于具备直线电机的 零传动"特性与气浮导轨的 无摩擦运动"特性,与传统的旋转电机+滚珠丝杆+滚动导轨的运动平台相比,直线电机+气浮导。
道路护栏杆清洗机设计开题报告
道路护栏杆清洗机设计开题报告开题报告课题名称道路护栏清洗机设计课题类型B-实践应用型指导教师学生姓名学号专业班级本课题的研究现状、研究目的及意义研究现状:1.国外道路护栏清洗机技术现状随着我国经济的快速发展,高等级公路的建设也逐步加快。
为保证交通及车辆分道行驶的安全性,高速公路都设置了防撞护栏。
在护栏的使用过程中,由于车辆的尾气排放、风沙雨水侵蚀及其它自然或人为原因,护栏表面会出现灰尘污染,久而久之还会出现结垢,其不仅会使护栏标志不洁而失效,更容易造成交通事故,而且也会使其失去美观,影响路容路貌。
护栏的整洁关系到城市的市容市貌,也更是国家形象的体现。
因此护栏的清洗是各地环卫部门的重要工作。
2.关于道路护栏清洗机的国内外发展现状(1)国外道路护栏清洗机技术现状我国清扫车技术的发展令世界瞩目,但是,与发达国家相比,我国清车还存在不少差距。
我国的清扫车在清扫效率、清扫能力、除尘效果等清扫作业性能方面与发达国家的水平相当,而在清扫车的噪声、排放、可靠性、舒适性,自动调整等方面仍存在较大差距,特别是全液压清扫车,仅相当于发达国家20世纪80年代末到90年代初产品的水平。
就目前我国清扫车的水平和质量可知,我国在清扫车设计中,还缺少对专用部件的研究,缺少设计理论的指导,经验多于计算,模仿较多,创新较小。
可以说,目前我国对清扫车的研究能力还较差,还未真正达到对清扫车进行研究的目的和要求,同时,缺乏必要的研究条件。
目前,我国中小型全液压清扫车除与汽车底盘改装的清扫车存在同样的缺陷外,还存在舒适性差、声大、车质量大、形不够美观等缺点。
外国内的清扫车在以下几个方面有待改进:如在高可靠性上,设备的高可靠性就是指某种设备的可靠程度,即在其正常使用当中的无故障间隔时间的长短。
国产工程机械平均无故障间隔时间为150小时一300小时。
而国外工程机械都在600小时一2000小时。
我国工程机械的平均使用寿命仅为国外同类产品的1/2,甚至不到1/2。
一种道路护栏清洗机的制作方法
一种道路护栏清洗机的制作方法1. 引言道路护栏在保障交通安全和行车顺畅方面起到了关键作用。
长期以来,道路护栏的清洁都是人工清洗,存在效率低、费时费力、效果不佳等问题。
为了解决这些问题,提高护栏清洁效率和质量,我们设计了一种道路护栏清洗机。
2. 清洗机的设计与构成道路护栏清洗机主要由三部分构成:机架、清洗装置和电控系统。
机架为整个清洗机的支撑基础,其上设置有清洗装置,清洗装置由喷水装置、擦洗装置和抽吸装置三部分组成。
电控系统是整个清洗机的控制中心,用于控制清洗机的启停和各项功能,如清洗时间、清洗强度、清洗方式等。
2.1 机架机架是整个道路护栏清洗机的支撑基础,其结构由上下两层构成,下层由高强度合金铝和不锈钢等材料组成,上层为铝型材结构,两层通过螺栓连接成一个整体。
在机架的顶部、底部以及两侧都安装有多个轮子和支架,以方便移动和定位清洗机。
2.2 清洗装置清洗装置是道路护栏清洗机的核心,其功能是喷水、擦洗和抽吸。
清洗装置分为喷水装置、擦洗装置、抽吸装置三部分组成。
•喷水装置:用于向护栏表面喷水清洗。
实现的方式是,将压力水泵产生的高压水通过高压软管输送到喷嘴,并通过旋转接头使喷嘴按照一定的轨迹喷洒水流。
•擦洗装置:用于擦洗护栏表面的污垢和杂物。
实现的方式是,将旋转刷头和刷毛浸入清洗液中,并通过电机带动刷头旋转,在接触护栏表面时产生擦洗效应。
•抽吸装置:用于将清洗液和护栏表面的污垢吸入清洗机。
实现的方式是,通过吸风机和高效滤网组成的吸入系统,将清洗液和污垢吸入清洗机,在过滤器的作用下清理清洗液,并将干净的清洗液送回喷水装置中进行回收重复利用。
2.3 电控系统电控系统是整个道路护栏清洗机的控制中心,用于控制清洗机的启停和各项功能,如清洗时间、清洗强度、清洗方式等。
电控系统主要由微处理器、中央处理器、开关、指示灯等组成。
通过合理的编程,可以实现不同清洗需求下的多样化操作。
3. 清洗机的工作原理道路护栏清洗机工作原理基于清洗装置的运作,其基本过程如下:1.将清洗液加入清洗机的液位线(约20L)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录摘要 (1)关键词 (1)1 前言 (1)2 国内外现状 (2)3 设计方案的确定 (2)3.1 整机方案的确定 (3)3.1.1 整机特点 (4)3.1.2 动力选择 (4)4 工作头部分设计计算 (5)4.1 道路栅栏清洗工作头设计方案的确定 (5)4.2 清洗滚筒设计 (7)4.2.1 滚轴的设计计算 (8)4.2.2 毛刷的排列 (10)4.2.3 毛刷的材质 (10)4.3 滚刷轴承型号的选择计算 (10)4.4 变速机构的设计 (11)4.4.1 齿轮轴的设计 (13)4.4.2 第二轴的设计 (14)4.4.3 轴的轻度校核 (15)4.5规避机构的设计计算 (15)4.5.1 承受变载荷的圆柱旋转拉伸弹簧设计 (16)4.6洗系统的设计 (17)4.6.1 高压喷水管设计 (17)5 吊臂的校核计算 (18)6 结束语 (18)参考文献 (19)致谢 (20)附录 (21)滚筒式城市道路栅栏清洗机设计学生:郑奎指导老师:全腊珍(湖南农业大学东方科技学院,长沙 410128)摘要:本设计是通过液压传动,电器控制来实现运动的。
开篇分析了城市栅栏清扫机的集中常见方案,通过比较选定方案。
对清洗机工作部分进行分析,并运用动力学,机械原理等有关知识对某些重要零件做了准确的强度校核及设计整个机械实现运动的机构与零件各部分。
其中对清洗系统、规避机构等做了较详细的分析,并做了较简单的校核。
关键词:清洗滚筒;变速机构;规避机构;升降机构Drum fence cleaning machine is designed for urban roadsStudent: Zheng KuiInstructor: Quan Lazhen(Oriental Science &Technology College of Hunan Agricultural University, Changsha 410128)Abstract:The design is to achieve movement through the hydraulic transmission, electrical control. Begins with analysis of the urban fence sweeper centralized common program by comparing the selected program. To analyze the working part of the washing machine, and some important parts to do the exact strength check and design the entire mechanical movement of bodies and parts of the various parts of the knowledge of the use of dynamics, and mechanical principles. Cleaning system, to avoid institutions, which do a more detailed analysis, and to do a simple checkKey words:Cleaning roller; speed change mechanism; circumvent institutions; lifting mechanism1、前言:想起环卫工人,人们脑海中总会容易浮现这样的一幅画面:马路上,戴着口罩,拿着大扫帚和抹布,顶着烈日工作。
如今,在北京,上海,广州等发达城市,人们在街上看到的不再是环卫工人在工作,而是越来越多的环卫机械露面了。
随着社会经济的发展,人们对生活环境要求越来越高了,在人口集中度很高的城市,垃圾的处理水平代表了一个城市的经济发展水平和文明程度。
以广州为例,目前广州大部分的家庭生活垃圾收集率达到45%左右,广州每天产生5000多吨,绝大部分市实现袋装收集,压缩中转,密封运输,据了解:广州环卫机械化程度已经达到80%,比建设部要求的40%的标准高出一倍,我国环卫车辆经过30多年的努力,从无到有,从局部使用到大量推广使用,基本形成了一个品种比较齐全,技术水平较高的新兴产业,全国约有100余家各类厂家生产的环卫车辆,为环卫系统提供了大量装备,改善了工人的劳动条件,提高了城市现代化管理水平。
我国垃圾处理设备起步较晚,经过十多年的努力,虽已有了一定的基础,但与国外相比尚有一定差距,扫路机在90年代前都是国内自行研制生产,品种少、技术性能不高。
90年代后,在引进、吸收国外先进技术的基础上,开发生产了大、中、小型多种扫路机,基本型式为吸扫结合,使我国扫路机达到了比较先进的技术水平。
主要生产厂家有长沙的中标公司,扬州的船舶集团公司、沪州机器厂、天津扫地王公司、北京天路通科技有限责任公司等。
国内生产的各种扫路机基本上满足了国内市场需要,已很少进口。
雪后留心的市民在出行中注意观察的话可以看到,由于气温逐渐回升,快行道上布满融化的残留冰水,由于机动车的飞溅导致道路中央洁白的隔离护栏污浊变色,与周围的环境不协调,影响市容市貌。
为了让精美漂亮的护栏洁白如初,确保市容环境干净整洁。
在公路交通中,广泛采用了隔离栅栏的物理隔离方法,使不同车种。
不同行驶方向的车辆以及人车分离,以确保交通安全。
由于机动车辗压道路污水,灰尘,致使道路栅栏污浊变色,与周围环境不协调,影响市容。
由此带来了栅栏的清洗问题,过去由人工清洗,动作缓慢,效率比较低,同时既带来了清洁工人自身的人身安全问题,阻碍交通。
为此专门开发研制了道路隔离栅栏清洗车,极大的提高了清洗效率,保障了清洁工人的人身安全,美化了市容,这种清洗车的开发给城市清洁工作带来了极大的方便,有非常广阔的开发前景。
2. 国内外研究现状:在我国的大中城市道路栏杆大部分是铁栅栏,由钢管,钢筋或铁条焊接而成,多段(节)栅栏采用焊接或者螺栓连接而成,铁栅栏与路面固定或者做成带底盘的可移动的、式的,栅栏高度约为1—1.5不等,长度长达数千或者数万米,形状各异,主要用于快车或慢车道,上行或者下行的隔离栅栏,目前城市道路栅栏有三种清洁方式:(1)人工清洗方式,劳动强度大,效率低,成本高,危险性高,影响市容;(2)利用洒水车的消防龙头冲洗栅栏,这种方式耗水量大,效果差;(3)刷涂新漆,应付每年的文明城市达标或者评比检查;国内的一些栅栏清洗机大多数采用单边滚筒式滚刷工作;工作效率不高,而且不能同时对栅栏两边进行清洗。
国外的发达国家,荷兰等国栅栏清洗机方面已经进入人工智能阶段化、数字化方向发展,由单一的作业功能特征向集作业、信息、监管为一体的综合功能特征方向发展,使国内环卫装备水平满足现代化国际大都市发展的需求,并建立起具有一流技术、符合中国国情的环卫作业装备系统,20世纪80年代末以来,我国环卫车辆的研发机构、改装生产企业通过引进、消化、吸收国外先进技术,加快了国产环卫车辆新产品的研发和生产,使国产环卫车辆的技术装备水平得到较快发展和很大提高,改变了传统的环卫作业方式,由人工作业向机械化、半机械化方向发展,环卫车辆的装备技术由简易型向技术密集型方向发展,目前存在的主要问题是,垃圾处理设备生产还没有形成像环卫车辆那样一个产业,缺少专业生产厂家,只是根据订货临时寻找某个生产厂家组织生产,不利于产品性能的提高和垃圾处理设备产业的形成。
3. 设计方案的确定:3.1 整机方案的确定:本机是通过液压臂悬挂于BJ1059VCJD6—2清洗车上,由液压升降机构自由调节高度,并配备规避装置,高压清洗系统,能有效的对道路栅栏清洗机的道路栅栏清洗机,其整机工作样式图如下:图1主要技术性能参数表Table 1 the main technical performance parameters table外形尺寸 70*120*160 最大清扫速度 5km/h底盘型号奥铃BJ1059VCDJ6—2 最大清扫能力 500mh副发动机型号五十铃柴油机不锈钢水箱容积 800L最高行驶速度 95km/h 垃圾箱底部型式平底最大清扫宽度 1.5m 满载最大质量 5200kg3.1.1整机特点(1).采用液压式悬挂式侧前置栅栏清洗机工作头中置四盘刷—后置吸嘴并在吸嘴内设置卧扫的扫,吸工作装置总体结构配置形式,并具体有清晰效率高,清洗宽度大,清扫速度高,扫净度等优点。
(2).各部分清扫独立或联动工作。
(3).清扫具有自动避让保护功能和自动复位功能,滚筒转速可根据各种不同清扫工况调速选择度高,中,低三档。
(4).液压系统有副发动机取力和汽车动力分别控制,方便使用和维修;(5).洒水系统通过本身的废水回收系统能有效克服清洗作业时产生二次污染;(6).液压式系统通过采用叠加式电磁换向阀向阀组高度集中而成。
(7).控制开关集中安装在驾驶室内,所以电控操作可以在驾驶室内完成。
3.1.2动力选择:液压式:操作力大,体积小,动作平稳,其特点是漏油会影响系统的工作性能,液压油的粘度对温度的变化敏感;气动式:气源方便,维护简单,易于获得高速度,其缺点是操作力有限,体积大,空气压缩性大,速度难控制困难,动作不平稳,控制有滞后现象;电动势:动力源方便,操作力较大,其缺点是需要设置减速机构,结构复杂,或许要特殊电机驱动;综上所述本设计选用电动式驱动装置。
本设计是道路栅栏清洗机采用动力是柴油机,柴油机动力型号是Deutz BF4M1013C,该柴油机采用水冷式对发动机进行冷却,额定功率为112KW ,最大扭矩为570Nm,额定转速为2300/min,副发动机采用的是五十铃技术的柴油机,额定功率为25KW ,额定转速为3000r/min冷却方式为水冷。
经过试验清洗刷清洗灌刷对栅栏的正压力为F=200N 。
磨檫系数f 取0.2则磨檫力为40N因有四个滚刷故磨檫力F=160N 滚刷转速设定为900r/min ,其清洗速度V=5.0m/s.则其所需功率: P==1000FV =1000/5*160N s m 0.8KW (1) 故选用J04-21-2功率为1.5KW ,电压220V 转速n 为2860r/min 重量的电机4 工作头部分设计及其计算4.1 道路栅栏清扫机工作头设计方案的确定本人设计的清洗头所需采用的是四滚筒,电力驱动双边清洗,能自动调节并配液压提升机构车载道路式栅栏清扫机其整机工作原理图如下:图2清洗机工作头工作原理1电动机 2变速箱 3滚筒刷 4 规避装置1. motor2. gearbox3. roller brush4. circumvention devicesFigure 2 washing machine head works旋转刷洗系统主要有变速机构,规避装置,滚刷轴,毛刷组成,通过安装在清洗头上的电动机,通过变速箱带动滚刷旋转。