潜艇突破敌水面舰艇反潜巡逻线补充侦查分析
海上打击方案
海上打击方案1. 引言海上打击方案是指在海上战斗中使用的战术和技术的统称。
随着现代战争的发展,海军作战的重要性日益显现。
为了维护国家的海上利益和安全,各国海军都需要制定和实施相应的海上打击方案。
本文将介绍海上打击方案的相关内容。
2. 海上打击目标在制定海上打击方案之前,我们首先需要确定打击的目标。
海上打击目标可以包括敌方水面舰艇、潜艇、航空器、岸防设施等。
不同的目标有不同的特点和防御能力,因此需要针对不同目标制定相应的打击方案。
3. 海上打击手段海上打击手段包括海军舰艇、舰载飞机、导弹等。
这些手段组成了海上作战的主要武器装备。
在制定海上打击方案时,需要充分考虑每种手段的特点和使用方法,以及它们之间的协同作战能力。
同时,还需要根据不同的作战环境和目标情况,选择合适的打击手段。
4. 海上打击策略海上打击策略是指在实施海上打击行动中所采用的具体策略和战术。
根据不同的目标和作战环境,可以采取不同的打击策略。
例如,在面对敌方舰艇的打击时,可以采取集中火力、迅速消灭的策略;而在面对敌方潜艇的打击时,可以采取反潜巡逻和雷击阵型等策略。
5. 海上打击训练为了确保有效的海上打击能力,海军需要定期进行海上打击训练。
这些训练包括打击目标的识别、打击手段的操作、打击策略的实施等。
通过训练,可以提高海军官兵的战斗素养和协同作战能力,保证海上打击方案的有效实施。
6. 海上打击的挑战海上打击面临着许多挑战。
首先,海上作战的环境复杂多变,天气、海况等因素都可能对打击行动产生影响。
其次,敌方的作战能力也在不断提升,可能采取各种对抗措施。
此外,打击行动还需要与其他军种、其他国家的协同作战,需要解决指挥、通信等问题。
面对这些挑战,需要不断研究和改进海上打击方案,提高海军的打击能力。
7. 战争中的海上打击在现代战争中,海上打击起到了重要的作用。
通过海上打击,可以迅速击败敌方的海上武装力量,控制制海权,保证海上通道的安全,遏制敌方的行动。
潜艇伴随水面舰艇编队搜潜效能研究

舰
船
科
学
技
ቤተ መጻሕፍቲ ባይዱ
术
Vo . 1 33.No 1 . 0 Oc .,2 1 t 01
S P SCI HI ENCE AND TECHNOL OGY
潜艇伴随 水 面舰艇编 队搜潜效能研究
王 慎 , 章 松 石 ,王 芳。
( . 军工 程 大 学 电子 工程 学 院 , 1海 湖北 武 汉 4 0 3 ; . 军 9 1 5部 队 , 江 舟 山 3 6 0 30 3 2 海 11 浙 1 0 0; 3 中国人 民解放 军 9 7 6部 队 , . 14 北京 10 4 ) 0 8 1
摘 要 : 针对潜艇 “ 冲刺一 流” 漂 伴随搜潜样式 , 运用相对航路 分析方法 , 给出了“ 冲刺” 阶段有 效搜索 宽度 的
0 引 言
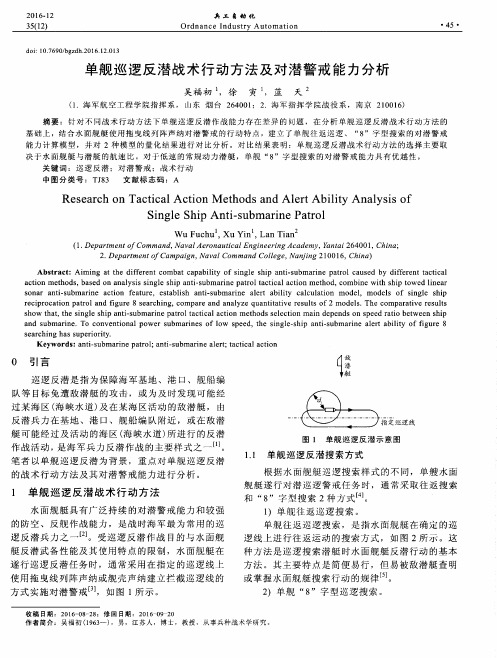
伴 随水 面 编 队搜 潜 是 指 潜 艇 同 被 护 航 目标 组 成
一
与 水 面编 队保 持相 对稳 定 的警 戒 阵位 , 二者 的总航 向 应 保持 一 致 ; 另一 方 面 要 求 潜 艇 能有 效 地 听测 目标 ,
其 作 战态 势 如 图 1所示 。如 果 采 用 航 速 不 变 的 连 续
中图分 类 号 : E 1 97
文 献标 识码 : A D :0 3 0 /.s .6 2 7 4 . 0 1 1 . 3 oI 1 . 4 4 ji n 1 7 — 6 9 2 1 . 0 0 2 s
文 章编 号 : 1 7 — 6 9 2 1 ) 0 0 3 — 4 6 2 7 4 ( 0 1 1 — 12 0
Absr c : Ai n a s r t s ac mo o u t a t mi g tdic ee e r h de f s bma i e c o p nyn s ra e o m ai n,r ltv rn a c m a i g u f c f r to e ai e
海上“名捕”:反潜巡逻机
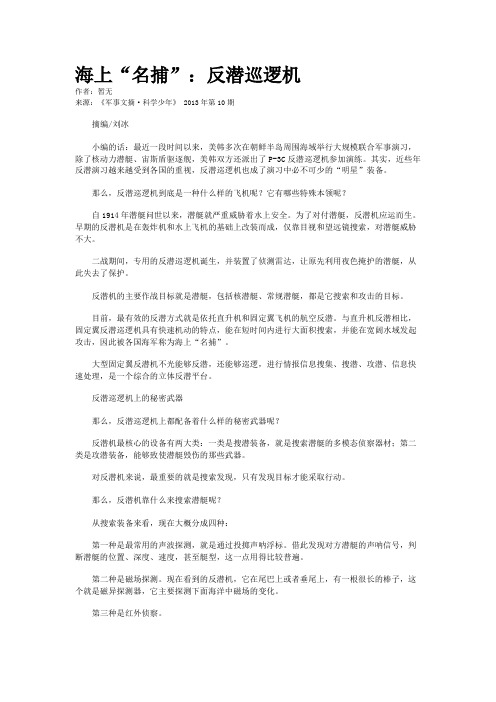
海上“名捕”:反潜巡逻机作者:暂无来源:《军事文摘·科学少年》 2013年第10期摘编/刘冰小编的话:最近一段时间以来,美韩多次在朝鲜半岛周围海域举行大规模联合军事演习,除了核动力潜艇、宙斯盾驱逐舰,美韩双方还派出了P-3C反潜巡逻机参加演练。
其实,近些年反潜演习越来越受到各国的重视,反潜巡逻机也成了演习中必不可少的“明星”装备。
那么,反潜巡逻机到底是一种什么样的飞机呢?它有哪些特殊本领呢?自1914年潜艇问世以来,潜艇就严重威胁着水上安全。
为了对付潜艇,反潜机应运而生。
早期的反潜机是在轰炸机和水上飞机的基础上改装而成,仅靠目视和望远镜搜索,对潜艇威胁不大。
二战期间,专用的反潜巡逻机诞生,并装置了侦测雷达,让原先利用夜色掩护的潜艇,从此失去了保护。
反潜机的主要作战目标就是潜艇,包括核潜艇、常规潜艇,都是它搜索和攻击的目标。
目前,最有效的反潜方式就是依托直升机和固定翼飞机的航空反潜。
与直升机反潜相比,固定翼反潜巡逻机具有快速机动的特点,能在短时间内进行大面积搜索,并能在宽阔水域发起攻击,因此被各国海军称为海上“名捕”。
大型固定翼反潜机不光能够反潜,还能够巡逻,进行情报信息搜集、搜潜、攻潜、信息快速处理,是一个综合的立体反潜平台。
反潜巡逻机上的秘密武器那么,反潜巡逻机上都配备着什么样的秘密武器呢?反潜机最核心的设备有两大类:一类是搜潜装备,就是搜索潜艇的多模态侦察器材;第二类是攻潜装备,能够致使潜艇毁伤的那些武器。
对反潜机来说,最重要的就是搜索发现,只有发现目标才能采取行动。
那么,反潜机靠什么来搜索潜艇呢?从搜索装备来看,现在大概分成四种:第一种是最常用的声波探测,就是通过投掷声呐浮标。
借此发现对方潜艇的声呐信号,判断潜艇的位置、深度、速度,甚至艇型,这一点用得比较普遍。
第二种是磁场探测。
现在看到的反潜机,它在尾巴上或者垂尾上,有一根很长的棒子,这个就是磁异探测器,它主要探测下面海洋中磁场的变化。
反潜网络在潜、舰、机协同反潜作战中的应用

反 潜 网 络 在 潜 、 舰 、 机 协 同 反 潜 作 战 中 的 应 用
王 慎 。石章松 ,张 丕旭
摘
( . 工程大学 电子工程学院 湖北 武汉 4 0 3 ;2海军 9 l5部队 浙江 舟山 3 6 0 1 海军 303 . ll l0 0) 要 :针对未来反潜战网络化 、协 同化的趋势,基 于新 型通信技 术,描述 了反 潜网络的 工作原理及所 用通信技
Ab t a t sr c :Co c r ig o h e d o n is b rn o a o n t r d d c o e ai n t e r n n r cp eo n e n n t e t n fa t u mai e c mb t e wo k mo e a o p r t , h n r . t n o un ig p i i l f n
An i u ma i eNe wo k n ep ro ma c e t r s f h o t S b r t r sa d t e r n e f au e e c mmu i ai n tc n l g e en t r r n r d c d — n h f o t nc t e h o o i si t ewo k a ei to u e o nh b s d o o e o a e n n v l mmu i ai n tc n l g e . y ia o p r t e a t s b r ec mb t d sb s d o en t r r c n c t h oo i s T p c l o e ai . n i u ma i o a o e c v . n mo e a e n t e wo k ae h p o o e o eta i o a n is b rn lto ms As s l t en t r k sb s o er c n as a c b l y o r p s d f r h d t n l t u ma i ep a f r . r u t h ewo k ma e e t f h e O n is n e a i t f t r i a . a e . t i a t.u mai e p af r n mp o e e t._ 0 n is n e a d e r - r ig t r aie h e t . tr e t n n is b r lto ms a d i r v s r moe r c n as a c n a l wa n n .I e l s t e r mo e i e c p i - n e y z n o g i a c d p o td g e tyt efg t f in y o n l l t r u d n e a r mo e r al h nce c f i g e p af m. n h i e s o Ke r s a t s b r i en t o k ; o p r t ea t s b rn ; o a d y wo d : n i u ma n e . w r s c o e ai n i u ma i e c mb t v — mo e
推进潜艇兵力走向远洋的几点思考
总第271期2017年第1期舰船电子工程Ship Electronic EngineeringVol. 37 No. 11推进潜艇兵力走向远洋的几点思考$胡冬英黄锐蔡广友(海军潜艇学院青岛266000)摘要随着我国海洋经济和海洋权益的迅速发展,海军战略正从“近海防御”向“近海防御、远海防卫”转变,加快推进 潜艇兵力走向远洋,执行远海存在、防卫作战、实战训练、熟悉战场环境、参与国际合作等任务,这对潜艇兵力有效履行新世 纪新阶段历史使命任务具有十分重要的意义。
关键词潜艇兵力;远洋;走出去中图分类号E815 DOI:10. 3969/j. issa 1672-9730. 2017. 01. 001Several Thoughts on Advancing the Submarine Force to the OceanHU Dongying HUANG Rui CAI Guangyou(Navy Submarine Academy, Qingdao 266000)Abstract With the rapid development of China^ maritime economy and maritime interests, the naval strategy is changing from "coastal defense" to "coastal defense and offshore defense", accelerating the submarine force to the ocean,performing the open sea, defensive operations,actual combat training, familiar with the battlefield environment, participating in international cooperation and other tasks, which has important significance for submarine force to fulfill the historical mission of the new century.Key Words submarine force, open sea, go outClass Number E815i引言21世纪是海洋世纪,海洋是战略资源的重要 基地。
潜艇反舰与单舰反潜的攻击占位对比分析

较两种平台的攻击占位原理来进一步优化水面舰 艇攻潜占位的研究思路,以便为新型舰艇反潜指控 体系的设计提供有益参考。
2 潜艇反舰攻击占位原理
就一次完整的鱼雷攻击过程而言,潜艇需要完 成对目标的侦察、识别、接敌、跟踪、占位和射击(引 导)等一系列战术行动。所谓“占位”就是潜艇在接 敌跟踪过程中测定出目标运动要素后,结合本艇的 机动参数和鱼雷性能判断占领射击阵位的可行性, 并在指定时间内按照规定的航速、航向占领预定射 击阵位。潜艇在确定射击阵位时需要考虑两个重
Vol. 39 No. 1 22
舰船电子工程 Ship Electronic Engineering
总第 295 期 201总9 年第第2915 期
潜艇反颜辉 2
(1. 海军驻大连 426 厂军事代表室 大连 116005)(2. 武汉数字工程研究所 武汉 430205)
∗ 收稿日期:2018 年 7 月 12 日,修回日期:2018 年 8 月 16 日 作者简介:韩超,硕士,工程师,研究方向:水下攻防技术 。
2019 年第 1 期
舰船电子工程
23
要概念——占位射击可行域和有利射击阵位域[1~5]。 所谓“占位射击可行域”是指满足鱼雷攻击航
程要求,且潜艇依靠平台机动可以抵达的射击阵位 域,由“鱼雷射击可行域”和“潜艇机动可行域”共同 决定(如图 1 所示)。其中,鱼雷射击可行域是指鱼 雷极限射距圆与最小允许射距圆之间的区域,反映 了 两 种 平 台 运 动 状 态 、相 对 位 置 与 鱼 雷 最 大 航 程 SQTmax、最小允许射程 SQTmin 之间的关系;潜艇机动可 行域是指在当前态势下,潜艇以可用最高航速能够 占领的相对目标位置区域。图 1 按照潜艇航速 VQ 小于目标航速 VW给出了一种典型的占位射击可行 域示意,若潜艇机动可行域与鱼雷射击可行域无交 域则不能占位射击,若 VQ>VW 时则占位射击可行域 就是全部的鱼雷射击可行域。
反潜巡逻机声呐浮标巡逻搜索态势分析模型

反潜巡逻机声呐浮标巡逻搜索态势分析模型谭安胜;王新为;尹成义【摘要】基于对巡逻搜索特点的认识,提出了当反潜巡逻机使用声呐浮标对潜巡逻搜索时,必须将布设线列阵、监听线列阵以及布阵与听阵之间的关系综合一体考虑的观点.给出了单列阵和复列阵的定义,建立了单(复)列阵搜索态势和复列阵优化配置分析模型.分析了反潜巡逻机巡逻搜索方法的本质和搜索方法研究需要解决的基本问题,提出了"两类六种"声呐浮标巡逻搜索方法.基于搜索态势和搜索方法的分析,得出12条综合结论,为反潜巡逻机声呐浮标巡逻搜索提供了理论与技术基础.%Based on our perception of the features of patrol search, the viewpoint is proposed that when the antisubmarine patrol aircraft uses sonobuoys for searching submarines, the deploying of linear array, the monitoring of linear array and their relationship should be taken into integrated consideration.The definitions of single array and complex array are given, and the analytical models of the search situation of thesingle/complex linear array and the optimal configuration of the complex linear array are established.The essence of the patrol search methods of antisubmarine patrol aircrafts and the basic problems to be solved are analyzed.Two types, totally six kinds of aircraft patrol methods using sonobuoys for submarine search are proposed.Based on the analysis of the search situation and the search methods, twelve comprehensive conclusions are drawn, which provides a theoretical and technical basis for anti-submarine patrol aircrafts in the patrol search using sonobuoys.【期刊名称】《电光与控制》【年(卷),期】2018(025)004【总页数】6页(P1-6)【关键词】反潜巡逻机;巡逻搜索;声呐浮标;搜索态势;搜索方法【作者】谭安胜;王新为;尹成义【作者单位】海军大连舰艇学院舰船指挥系,辽宁大连 116018;海军大连舰艇学院舰船指挥系,辽宁大连 116018;海军大连舰艇学院舰船指挥系,辽宁大连 116018【正文语种】中文【中图分类】E925.40 引言反潜巡逻机在巡逻线上对潜搜索,简称巡逻搜索。
潜艇追踪问题研究
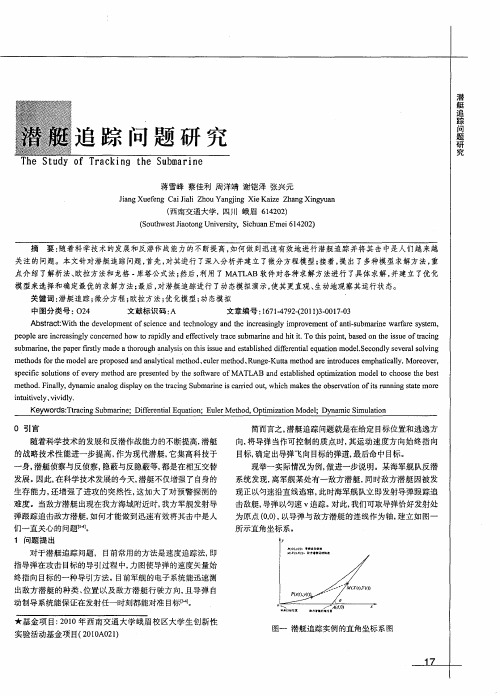
O 引言
简而言之
随着 科学技术 的发展和反潜作 战能力的不断提高, 艇 潜
向, 将导 弹当
的战略技术性能进一步提高, 作为现代潜艇, 它集高科技于
一
目标, 确定出
现举一
系统 发现, 离 现正以匀速耗 击 敌艇 , 导弹
为原 点 (, , 00 ) 所示直角坐
身, 潜艇 侦察 与反侦察 , 隐蔽与反 隐蔽等, 都是在相 互交替
关注的 问题。本 文针对潜艇追 踪问题, 首先 , 对其进行 了 深入分析并建立 了 微分 方程模 型 ; 着, 出 了多种模 型求解方 法, 接 提 重 点介 绍 了解析法 、 欧拉方法和龙格 . 库塔公 式法; 然后 , 用 了 MAT AB软件对各 种求解方法进行 了具体 求解 , 利 L 并建 立 了优化
踪 问 题
研
究
( 西南交通大学,四川 峨眉 6 4 0 ) 12 2
(otwetio n nvri ,ScunEme 64 0 ) S uh sJ t gU ie t i a ’ i 12 2 a o sy h
摘
要: 随着科学技 术的发展和反潜作 战能力 的不 断提 高, 如何做 到迅速有效地进 行潜艇追踪 并将其 击 中是人们越 来越
s b rn , h a e rt d o o g n l ss n t i is ea d e tb i e i e e t l q ai n mo e. e o d y s v r l o vn u ma e t ep p rf s y ma ea t r u h a a y i o s s u n sa l h d d f rn i u t d 1 c n l e e a l i g i i l h h s ae o S s meh d o emo e r r p s d a d a ay i a me h d、 u e t o 、 n e Ku t t o r t d c se h t a l . o e v r t o sf rt d l ep o o e n n l t l t o e lr h a c me h d Ru g — t me d a ei r u e mp a i l M r o e , a h n o c y s e i c s lt n fe ey m eh d a e p e e t d b h o wa eo AT AB a d e tb ih d o t z t n mo e o c o s e b s p c f o u i so v r t o r r s n e y t e s f r f i o t M L n sa l e p i a i d l h o e t e t s mi o t h m e o . i a l, y a ca ao i ly ol h r cn u ma n are u , ihm a e eo s r ai n o sr n i g sa emo e h t d F n l d n mi n l g d s a i t eta ig S b r e i c rid o t wh c k st b e v t fi u n n tt r y p i s h o t
信息化条件下无人反潜作战平台探析
信息化条件下无人反潜作战平台探析【摘要】与反潜潜艇、反潜水面舰艇和反潜直升机等相比,无人反潜作战平台具有快速反应能力强、前沿部署能力强、作战半径大、部署成本低等优势,已成为世界海军强国竞相发展的装备。
本文针对信息化条件下反潜作战的特征,分析无人反潜作战平台的特点及其对潜艇作战的影响,以更好地适应未来反潜作战。
【关键词】无人反潜;作战平台;需求;特点0 引言随着潜艇向高速、深潜和低噪声方向发展,反潜作战变得更加困难和复杂。
随着以信息技术为核心的高技术广泛运用于反潜武器装备以及反潜作战理论,反潜作战也在不断的发展变化。
与反潜潜艇、反潜水面舰艇和反潜直升机等相比,无人反潜作战平台具有快速反应能力强、前沿部署能力强、作战半径大、部署成本低等优势,已成为世界海军强国竞相发展的装备。
针对信息化条件下反潜作战的特征,把握无人反潜作战平台的特点及其对潜艇作战的影响,对于更好地适应未来反潜作战至关重要。
1 信息化条件下反潜作战的主要特征1.1 信息融合,体系作战信息化条件下的反潜作战不仅是飞机、舰艇等与潜艇的对抗,而是双方基于信息的体系对抗,夺取制信息权是反潜作战的首要环节。
一方面,现代潜艇集诸多高新技术于一身,随着水下通信、潜射导弹等装备技术的发展,其自身作战能力大大增强。
另一方面,海上作战越来越注重与其他平台在信息、火力等方面的协同配合,反潜作战对象不仅是潜艇本身,还要应对为其提供掩护、保障及与之协同的其他兵力。
反潜作战效能的提高.越求越依赖于多兵种和多系统综合集成的大系统,通过反潜信息的融台和共享,各反潜兵力和武器系统将以信息为黏合剂形成一个完整的反潜体系,体系中各反潜兵力能够优势互补、互创条件、协调一致,形成体系反潜作战能力。
信息的高度共享和通信网络技术的发展,使得体系反潜作战将会取代传统意义上的反潜作战样式,反潜作战中体系整体作战将达到新的高度。
1.2 空间广阔,全维作战信息化条件下的反潜作战,战场空间将包括空中、水面、水下、太空的地理空间和信息空间完全覆盖的广阔领域,而且彼此联系、相互渗透、相互制约、相互影响,形成全维一体的反潜作战空间。
单舰巡逻反潜战术行动方法及对潜警戒能力分析
( 1 . De p a r t me n t f o C o m ma n d , Ⅳ v A e r o n a u t i c a l E n g i n e e r i n g Ac a d e m y , Y a n t a i 2 6 4 0 0 1 , C h i n a ; 2 . De p a r t me n t o f C a m p a i g n , N a v a l C o mma n d C o l l e g e , Na n j i n g 2 1 O 0 1 6 , C h i n a )
Abs t r a c t :Ai mi n g a t t h e d i f f e r e n t c o mb a t c a p a b i l i t y o f s i n g l e s h i p a n t i - s u b ma r i n e p a t r o l c a u s e d b y d i f f e r e n t t a c t i c a l a c t i o n me t h o d s , b a s e d o n a n a l y s i s s i n g l e s h i p a n t i — s u b ma r i n e p a t r o l t a c t i c a l a c t i o n me t h o d , c o mb i n e wi t h s h i p t o we d l i n e a r s o n a r a n t i — s u b ma r i n e a c t i o n f e a t u r e ,e s t a b l i s h a n t i — s u b ma r i n e a l e r t a b i l i t y c a l c u l a t i o n mo d e l , mo d e l s o f s i n g l e s h i p r e c i p r o c a t i o n p a t r o l a n d f i g u r e 8 s e a r c h i n g , c o mp a r e a n d a n a l y z e q u a n t i t a t i v e r e s u l t s o f 2 mo d e l s . Th e c o mp a r a t i v e r e s u l t s s h o w t h a t , t h e s i n g l e s h i p a n t i — s u bma r i n e p a t r o l t a c t i c a l a c t i o n me t h o d s s e l e c t i o n ma i n d e p e n d s o n s p e e d r a t i o b e t we e n s hi p a n d s u b ma r i n e .T o c o n v e n t i o n a l p o we r s u b ma r i n e s o f l o w s p e e d ,t h e s i n g l e — s h i p a n t i — s u b ma r i n e a l e r t a b i l i t y o f f i g u r e 8
水面舰艇与反潜巡逻机协同检查搜潜队形配置研究

第44卷第2期2022年4月指挥控制与仿真CommandControl&SimulationVol 44㊀No 2Apr 2022文章编号:1673⁃3819(2022)02⁃0033⁃05水面舰艇与反潜巡逻机协同检查搜潜队形配置研究唐㊀晨,孙秀文,吴㊀刚(海军指挥学院,江苏南京㊀210016)摘㊀要:已有文献中对水面舰艇与反潜巡逻机协同检查搜潜队形配置缺乏理论证明㊂运用相对运动原理和数学方法,对水面舰艇与反潜巡逻机协同检查搜潜队形配置进行建模分析,给出了详细的理论推导和计算公式,并仿真验证了其可行性㊂研究结果可为舰机协同检查搜潜提供理论参考㊂关键词:水面舰艇;反潜巡逻机;声呐浮标;检查搜潜;队形配置中图分类号:E273 1;E843㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2022.02.007ResearchonFormationDeploymentsofCoordinatedSearchforSubmarinesbyNavalShipsandAnti⁃subPatrolAircraftsTANGChen,SUNXiu⁃wen,WUGang(NavalCommandCollege,Nanjing210016,China)Abstract:Thereisnotheoreticalsupportforthecalculationofformationdeploymentsofcoordinatedsearchforsubmarinesbynavalshipsandanti⁃subpatrolaircraftsintheexistingliterature.Inthispaper,inlightofthetheoryofrelativemovementandmathematics,theformationdeploymentsaremodeled,thedetailedtheoreticalderivationandcalculationformulasaregiven.Thefeasibilityofthemodelisalsosimulatedandanalyzed.Theresearchresultscanbeusedasreferencetothecoordi⁃natedsearchforsubmarinesbynavalshipsandanti⁃subpatrolaircrafts.Keywords:navalships;anti⁃submarinepatrolaircraft;sonarbuoy;searchforsubmarines;formationdeployment收稿日期:2021⁃09⁃14修回日期:2021⁃10⁃21作者简介:唐㊀晨(1986 ),男,硕士研究生,讲师,研究方向为合同战术㊂孙秀文(1985 ),男,硕士研究生,助教㊂㊀㊀搜潜是反潜作战的重要前提[1]㊂随着潜艇降噪㊁规避搜潜等方面技术的发展,搜索发现潜艇变得更加困难[2]㊂舰机协同检查搜潜,由于可以实现兵力优势互补㊁提高搜索发现效能,在检查搜潜中运用较为普遍㊂水面舰艇与反潜巡逻机协同检查搜潜是一种常见的搜潜编组形式,主要在搜索海域范围广㊁潜艇存在可能性大㊁搜索时间比较长时使用[3⁃4]㊂其中,水面舰艇主要使用舰壳声呐㊁拖曳线列阵声呐等装备搜潜[4];反潜巡逻机主要使用声呐浮标㊁磁探仪等装备搜潜[5]㊂检查搜潜的目的是搜索发现指定海域中的潜艇,或是将指定海域搜扫干净,尽可能地排除里面的潜艇㊂对水面舰艇与反潜巡逻机协同检查搜潜问题进行建模分析,得出较优化的队形配置,对搜潜实践具有一定的理论指导意义㊂受篇幅所限,这里研究讨论水面舰艇使用舰壳声呐与反潜巡逻机布设声呐浮标协同检查搜潜的队形配置㊂1㊀水面舰艇与反潜巡逻机协同检查搜潜的一种队形㊀㊀水面舰艇与反潜巡逻机协同检查搜潜时,水面舰艇位于搜索带一端,采用单横队直航向机动搜索潜艇[1];反潜巡逻机在搜索带的两侧布设声呐浮标阵,以发现低速向搜索带两侧规避的潜艇[3],如图1所示㊂这里的队形,实际上是指水面舰艇与反潜巡逻机布设的声呐浮标阵的队形㊂图1㊀队形示意图2㊀水面舰艇与反潜巡逻机协同检查搜潜队形建模分析㊀㊀不妨假设在宽为B㊁长为L的搜索带内,可能存在某潜艇㊂上级计划派遣水面舰艇与反潜巡逻机实施协同检查搜潜,现需要配置协同检查搜潜队形㊂要确定搜潜队形,主要需要解决两个大问题:一是水面舰艇的队形和位置点;二是声呐浮标的阵形和位置点㊂34㊀唐㊀晨,等:水面舰艇与反潜巡逻机协同检查搜潜队形配置研究第44卷2 1㊀水面舰艇的队形和位置点为建模方便,设定为同型舰艇㊂水面舰艇位于搜索带的一端,采用单横队搜索,其声呐作用区的宽度至少要覆盖搜索带的宽度,如图2所示㊂因此,水面舰艇的队形宽度为Bdx=B-2djs(1)式中:Bdx为水面舰艇的队形宽度;djs为水面舰艇声呐的作用距离㊂图2㊀水面舰艇队形示意图由已有文献[6]可知,相邻舰艇声呐作用区应有一定的重叠,以有效防止潜艇从水面舰艇之间区域逃脱㊂如图3所示,水面舰艇的队形宽度[6]为Bdx=(n-1)kdjs(2)式中,n为水面舰艇的数量;k为间隔系数,通常kɪ[1,2]㊂由(1)㊁(2)式,可得水面舰艇的数量为n=Bkdjs+k-2k(3)当确定水面舰艇的数量和队形宽度后,易得各水面舰艇的具体位置点㊂图3㊀水面舰艇队形示意图2 2㊀声呐浮标的阵形和位置点2 2 1㊀声呐浮标的阵形声呐浮标配置在搜索带的两侧,采取直线阵,配置方向与水面舰艇的航向平行㊂配置时,反潜巡逻机与水面舰艇的行动应有效协同,以保证潜艇在规避水面舰艇搜索时,能够进入声呐浮标作用区㊂实现协同的方法是使反潜巡逻机活动周期与水面舰艇通过浮标障碍所需要的时间相等,即声呐浮标阵的长度等于水面舰艇在浮标工作时间内的航程㊂Lfb=vjtfb(4)式中,Lfb为声呐浮标阵的长度;vj为水面舰艇的搜索速度;tfb为声呐浮标工作时间㊂并且相邻声呐浮标作用区应有一定的重叠,以有效防止潜艇从声呐浮标之间区域逃脱㊂如图4所示,声呐浮标阵的长度[7]为Lfb=(n1-1)k1dfb(5)式中,dfb为声呐浮标的作用距离;n1为声呐浮标的数量;k1为间隔系数,通常k1ɪ[1,2]㊂由(4)㊁(5)式,可得需要的声呐浮标的数量为n1=vjtfbk1dfb+1(6)图4㊀声呐浮标阵形示意图2 2 2㊀声呐浮标的位置点确定了声呐浮标的阵形,还需要确定声呐浮标的位置点㊂先确定左右两侧基准浮标相对于侧翼舰艇的位置点㊂有了基准浮标的位置点,根据声呐浮标的间隔和布设方向,就可以依次确定其他声呐浮标的位置,最终可以完成整个队形配置㊂基准浮标为J点㊁K点的声呐浮标,如图5所示㊂确定基准浮标的位置,即要确定声呐浮标和侧翼舰艇的最小间隔Dx,以及基准浮标到水面舰艇队列线的距离Dy㊂1)声呐浮标和侧翼舰艇的最小间隔声呐浮标阵与水面舰艇的航向平行,如图5所示㊂当声呐浮标在侧翼舰艇正横位置时,与侧翼舰艇的间隔最小㊂该间隔要保证水面舰艇航行噪音和声呐工作不能干扰浮标工作㊂因此,Dx=dgr(7)式中,dgr为水面舰艇航行噪音和声呐工作不干扰第2期指挥控制与仿真35㊀图5㊀队形配置示意图浮标工作的最小距离,可以通过实测获得㊂2)基准浮标到水面舰艇队列线的距离水面舰艇的作用是发现水面舰艇搜索带内的潜艇,声呐浮标阵的作用是发现企图向水面舰艇搜索带两侧规避的潜艇㊂水面舰艇与声呐浮标阵协同时,要使规避水面舰艇搜索的潜艇进入声呐浮标阵㊂因此,声呐浮标阵应该布设在潜艇最有可能规避水面舰艇搜索的航向前方㊂首先,确定潜艇最为有利的规避航向㊂假设潜艇位于水面舰艇搜索带的左侧区域,显然潜艇向左规避更容易逃脱水面舰艇搜索㊂根据相对运动原理[8],可以把潜艇看作静止的,水面舰艇采用相对速度矢量向其运动㊂P1点为左侧舰艇的位置,P1Bң为左侧舰艇速度矢量,q点为潜艇的位置㊂假设潜艇规避速度不变,规避航向未知,把潜艇的速度矢量从q点平移到P1点,这时P1与圆上点的连线为潜艇的速度矢量㊂不难证明:当潜艇速度矢量取P1Aң,使得左侧舰艇相对速度矢量ABң与圆相切时,对于潜艇规避左侧舰艇的搜索最为有利,即潜艇距离左侧舰艇的最小距离最大㊂证明:潜艇的速度矢量为P1Aң,把潜艇看作静止的,左侧舰艇的相对速度矢量为ABң,过P1作AB的平行线P1D,P1D为左侧舰艇的相对航迹,潜艇距左侧舰艇的最小距离,即q点到P1D的垂线㊂不失一般性,不妨假设潜艇的速度矢量不是P1Aң,而是向左规避,即速度矢量为P1Aᶄң,把潜艇看作静止的,这时左侧舰艇的相对速度矢量为AᶄBң,过P1作AᶄB的平行线P1Dᶄ,P1Dᶄ为此时左侧舰艇的相对航迹㊂显然,潜艇位置q点到P1Dᶄ的距离小于到P1D的距离,问题得证㊂此时,当潜艇速度矢量为P1Aң时,øABP1称为临界角[9],用Q表示㊂Q=arcsin(|P1Aң|/|P1Bң|)=arcsin(vq/vj)(8)式中,vq为潜艇的规避速度㊂如图6所示㊂图6㊀左侧舰艇与潜艇相对运动示意图其次,确定潜艇可能逃脱水面舰艇搜索的区域㊂根据上述分析,当潜艇采取最有利的速度矢量P1Aң规避时,把潜艇看作静止的,P1D为左侧舰艇的相对航迹㊂间隔声呐作用距离作P1D的平行线EF,则EF为左侧舰艇声呐相对运动覆盖的边迹㊂同理可以得到右侧舰艇声呐相对运动覆盖的边迹EᶄF㊂这样就形成了LEFEᶄM区域,如图7所示㊂其实际意义在于:当潜艇位于LEFEᶄM区域内时,无论潜艇采取何种航向规避,其均会进入水面舰艇的声呐作用范围,即LEFEᶄM区域是水面舰艇有效搜索区域,并且LEFEᶄM区域是水面舰艇的最小有效搜索区域㊂那么,当潜艇位于LEFEᶄM区域外时,潜艇采取合适的航向规避,是可能逃脱水面舰艇搜索的,即LEFEᶄM区域外为潜艇可能逃脱水面舰艇搜索的区域㊂图7㊀潜艇可能逃脱水面舰艇搜索的区域示意图最后,确定基准浮标到水面舰艇队列线的距离㊂当潜艇位于LEFEᶄM区域外时,对于搜索带左侧区域的潜艇,其最有利的速度矢量仍为P1Aң㊂因此,布设左侧的声呐浮标阵时,可以认为潜艇采取速度矢量P1Aң规避水面舰艇搜索㊂当潜艇位于左侧区域的边界36㊀唐㊀晨,等:水面舰艇与反潜巡逻机协同检查搜潜队形配置研究第44卷点,即当潜艇位于L点时,其采取速度矢量P1Aң规避后,应该进入左侧布设的声呐浮标作用区㊂据此,为节约声呐浮标,可以将这枚浮标作为左侧的基准浮标,同理可以确定右侧的基准浮标,如图8所示㊂图8㊀队形配置示意图将图8左下侧区域放大,并作相应的辅助线,如图9所示,可知基准浮标到水面舰艇队列线的距离为Dy=|JV|+|VW|(9)其中:|JV|=|JU|cosQ=dfbcosQ(10)|VW|=|WL|tanQ=(|WP1|-|LP1|)tanQ=(Dx-djs)tanQ(11)将(10)㊁(11)式,代入(9)式,化简得Dy=DxsinQ-djssinQ+dfbcosQ(12)图9㊀队形配置左下侧区域放大图3㊀仿真验证下面,通过一个案例,验证队形配置的可行性㊂不妨假设在宽为30nmile㊁长为60nmile的搜索带内,可能存在某潜艇㊂水面舰艇与反潜巡逻机等性能参数如表1所示㊂表1㊀兵力参数表水面舰艇djs/nmile5vj/kn12声呐浮标dfb/km2tfb/h2dgr/nmile8反潜巡逻机与声呐浮标通信距离/km60携带浮标数/pcs100潜艇vq/kn7㊀3 1㊀确定水面舰艇的队形和位置点由(1)式,可得水面舰艇的队形宽度为20nmile㊂由(3)式,若间隔系数k取1 5,可得水面舰艇的数量为4艘㊂因此,水面舰艇的实际间隔为6 7nmile㊂3 2㊀确定声呐浮标的阵形和位置点首先,确定声呐浮标的阵形㊂由(4)式,可得反潜巡逻机布设的声呐浮标阵的长度为24nmile㊂由(6)式,若间隔系数k1取1 5,可知布设的数量为16pcs,实际间隔为3km㊂据此,对于长为60nmile的搜索带的两侧,需要3次布设声呐浮标㊂其中,第1次布设在t时刻,两侧分别布设16pcs,声呐浮标间隔为3km;第2次布设在t+2h,两侧分别布设16pcs,声呐浮标间隔为3km;第3次布设在t+4h,两侧分别布设9pcs,声呐浮标间隔为2 8km㊂3次共需要布设声呐浮标82pcs㊂为保证与声呐浮标阵的通信,反潜巡逻机每次在两侧声呐浮标阵之间的中心区域作环形或8字形航线飞行[10]㊂其次,确定声呐浮标的位置点㊂由(7)式,可得声呐浮标和侧翼舰艇的最小间隔为8nmile㊂由(7)㊁(8)㊁(12)式,可得基准浮标到水面舰艇队列线的距离为3 5nmile㊂确定了基准浮标的位置点,依次确定其他声呐浮标的位置点,即可完成整个队形的配置㊂综上分析,反潜巡逻机3次布设声呐浮标阵后,队形配置如图10㊁11所示㊂对于宽为30nmile㊁长为60nmile的搜索带,共需要4艘水面舰艇㊁1架反潜巡逻机组成协同检查搜潜编组执行任务,搜索时间为5h,两侧共需要布设声呐浮标82pcs㊂4㊀结束语本文运用相对运动原理和数学方法,对水面舰艇与反潜巡逻机协同检查搜潜进行了建模分析,探讨了配置原理和计算公式,并仿真验证了其可行性㊂在实际运用中,若搜索区域较大,通过计算发现需要的搜潜第2期指挥控制与仿真37㊀图10㊀第1㊁2次布设声呐浮标阵后队形配置示意图图11㊀第3次布设声呐浮标阵后队形配置示意图兵力较多时,可先将区域进行分区处理,后再运用该模型配置队形㊂在研究过程中,也存在一些不足,如未研究水面舰艇使用拖曳线列阵声呐或采取曲折机动等情况,这些问题还有待后续进一步研究分析㊂参考文献:[1]㊀鄂群,马远良,刘德才.舰机时间协同对潜检查搜索样式[J].火力与指挥控制,2009,34(10):115⁃116.[2]㊀鞠建波,祝超,单志超,等.反潜巡逻机应召布放多基地声呐阵搜潜效能研究[J].兵工自动化,2018,37(2):92⁃96.[3]㊀杨秀庭,许林周,李军,等.水面舰艇编队与反潜巡逻机协同对潜搜索效能分析[J].指挥控制与仿真,2017,39(2):15⁃18.[4]㊀崔旭涛,何友,杨日杰,等.基于舰壳声呐的多舰协同检查搜潜建模与仿真[J].海军航空工程学院学报,2009,24(5):568⁃572.[5]㊀刘哲民.反潜巡逻机的未来[J].世界军事,2019(17):26⁃31.[6]㊀刘斌,陈建华,李微波.基于搜索效能的水面舰艇编队搜潜对策研究[J].舰船电子工程,2012,32(1):17⁃18.[7]㊀敬玉平,巩健文,范赵鹏,等.应召反潜条件下浮标阵型规划研究[J].火力与指挥控制,2020,45(3):59⁃63.[8]㊀王桂军.军事航海学[M].北京:海潮出版社,2009.[9]㊀徐建志.水面舰艇对潜搜索能力建模与分析[J].舰船科学技术,2005,27(2):74⁃76.[10]徐功康,刘栋,董晶,等.预警机巡逻探测区域建模及效能分析[J].中国电子科学研究院学报,2020,15(5):470⁃476.(责任编辑:许韦韦)。
水面舰艇反潜作战能力评估

次 、 纵深 、 体化 的防潜 配 系 , 大 立 以期 降 低潜 艇 对 自 身 的威 胁 。 面舰艇 单舰反潜 , 水 是整个 防潜 配系 的重 要 组成 部分 , 对其反 潜作 战能力进行 评估研 究 , 分析
影 响 和制 约水 面舰 艇 反潜 作 战能 力 的重要 因素 , 找 出差 距 , 弥补 不 足 , 指 挥员 合 理 配 置 兵 力 打 下 基 为
a e o e y. I s a ls e v l a i n m o e nt o cng he g e e a c i a n l i a d v ld t s nd r c v r te t b i h s e a u to d lby i r du i t r y hir r h c l a a yss n a i a e f a i iiy b n e m p e e s b lt y a xa l . Ke wo ds ura e y r :s f c wa s i r h p, a t— u n is bma i ope a i a c p biiy, e a u ton, g e hi r r hia rne r ton l a a lt v la i ry eac cl an l s s a y i
直升 机 的对 潜搜 索 , 此外 , 本文关 注 的是对水 下 潜艇
收 稿 日期 :0 10 — 8 2 1 - 82
修 回 日期 : 0 1 0 — 8 2 1-92
的搜 索 、 击 、 攻 防御 3个 重 要 因素 的基 础 上 , 立 了反 潜 作 战 能 力 评 估 指 标 体 系 , 引 进 灰 色层 次 分 析 法 , 建 了 评 估 模 型 , 建 并 构 通
过 实 例 验 证 了 模 型 的可 行 性 。
潜艇在水下如何探测目标?

潜艇在水下如何探测目标?核潜艇在水下航行,是如何发现和识别目标的?几百米水下,伸手不见五指,战时,潜藏于海的潜艇如何识别出几十公里外的目标,它到底是敌舰还是我舰?仔细一想,这似乎挺难的。
核潜艇在水下潜行,它用来发现和识别目标的“眼睛”,就是声呐。
对核潜艇来说,声呐是它的最重要侦察监视设备,主要用于对水中目标搜索、警戒、识别、跟踪、监视和运动要素的测定,还可以进行水下通信和导航,保障潜艇的战术机动和水中武器的使用。
从结构组成来看,核潜艇上装备的声呐一般由基阵、电子机柜和辅助设备三部分组成,上述基阵中包含的水声换能器是声呐中的关键器件,它有两个用途:一是在水下发射声波;二是在水下接收声波。
核潜艇上装备的声呐,主要有两种,即主动声呐和被动声呐,平时状态下主要以被动声呐为主。
主动声呐是指声呐主动发射声波“照射”目标,而后接收水中目标反射的回波以测定目标的参数,主动声呐大多数采用脉冲体制,也有采用连续波体制的。
核潜艇在水下使用主动声呐来识别和探测目标的工作原理大致如下:首先,主动地发射声波,形成单个或多个具有一定扇面的指向性波束,或以全向的声脉冲信号向水中辐射;其次,接收由目标反射的回波,回传到声呐接收基阵,被转换成电信号,经一系列相关处理,在背景噪声中提取有用信号;最后,再经信号的后置处理,加工成适于各种终端显示或计算机处理的目标信息,输入终端设备进行显示或记录即可。
难就难在,你不能主动发信号。
比如,你用声呐向对方喊话:我是土豆,请问你是不是黄瓜?假如对方不是黄瓜,3枚鱼雷就会向你射来……潜艇最大优势是隐蔽,它们最擅长,也最喜欢干的事就是打黑枪。
若失去隐蔽,也就同时失去了自身最大的优势。
因此,主动发信号还有另一个弊端:即,你的核潜艇本来非常先进,静音性能超棒,你发现了20多公里远处,有一艘潜艇在活动。
但那艘未知潜艇本来还没有发现你,而你却主动打开声呐发信号,于是,你变透明了。
你说亏不亏?既然不能主动发信号,那怎么办?难道就这么僵持着?潜艇声纹识别未见其人,先闻其声。
潜艇分析报告

潜艇分析报告1. 引言潜艇作为一种重要的水下作战武器,具有低噪声、隐蔽性强的特点,成为军事领域中不可或缺的一种武器。
本文将对潜艇进行分析,从其发展历程、工作原理、应用领域、现有类型等方面进行探讨。
2. 发展历程2.1 初期潜艇早期潜艇主要用于侦查和攻击敌方舰队,其主要功能是在水下行驶。
最早的潜艇是手摇的,充气的,由木材和皮革制成,随后发展出了使用内燃机和电力驱动的潜艇。
这些潜艇虽然在技术上还比较简单,但为潜艇的后续发展奠定了基础。
2.2 第二次世界大战中的潜艇第二次世界大战期间,潜艇起到了至关重要的作用。
德国的U艇成为了战争的重要因素,利用其在海上的优势,德国成功地打击了大量的商船和军舰。
这些战斗经验对潜艇的技术发展以及战术运用产生了深远的影响。
2.3 现代潜艇现代潜艇采用了先进的技术,具有更高的潜航深度、更长的续航力和更强的打击能力。
通过核动力系统的应用,潜艇的作战半径得到了显著的增加,大大提高了其在海洋中的作战能力。
此外,现代潜艇还加强了对传感器和隐身技术的研发,进一步提高了其在水下的隐蔽性。
3. 工作原理潜艇的工作原理可以简单概括为:通过潜艇的浮力和重力的调节,在水中实现浮沉控制;通过动力系统提供推进力,并通过舵控系统实现航向的控制。
具体来说,潜艇的浮沉控制是通过调节潜艇内部储存的水和气的分配来完成的。
潜艇的推进力主要来自于电力或核动力系统,通过驱动螺旋桨推进潜艇前进。
控制潜艇航向则是通过操纵舵和舵面来实现的。
4. 应用领域4.1 军事领域潜艇在军事领域中有着广泛的应用。
其主要包括敌舰打击、敌方海岸设施打击、水下侦察和情报收集等任务。
潜艇在海军力量中具有强大的威慑力和打击力,能够迅速而隐蔽地接近敌方目标,实施突袭和打击。
4.2 科学研究潜艇在科学研究领域也起到了重要的作用。
科研潜艇能够进行海洋生物学的研究,开展海底地质学、海洋气象学、海洋地球物理学等多个领域的科学研究。
通过潜艇,科学家可以深入海底,开展对海洋深处环境和生物的观察和研究。
中国潜艇具体实践应用情况报告
中国潜艇具体实践应用情况报告自第一次世界大战以来,潜艇广泛应用。
由于它能够执行重要任务,如保护近岸、突破封锁以及攻击敌方军舰,因此全球海军都十分重视潜艇。
作为一种战略装备,潜艇的研发需要全面的工业能力。
目前,只有几个国家具备自主设计和生产能力。
根据不同的动力源,潜艇被分为核潜艇和常规动力潜艇。
核潜艇使用核反应堆作为动力,目前只有6个国家拥有这种潜艇;常规动力潜艇则主要使用柴油机,许多国家都装备了这种潜艇。
与常规潜艇相比,核潜艇具有很明显的优势。
它的动力输出更大,续航能力更强,而且水下航速也远高于常规潜艇。
一次核燃料填充可以支持运行10年以上。
在攻击力方面,核潜艇体积大,可以携带更多武器,通常攻击力也更强。
此外,核潜艇具有天然的隐蔽性和持续高速航行的优势。
核潜艇的另一个作用是全球监视。
打航母的第一个问题就是要知道航母在哪里。
现在卫星侦察发达了,但卫星侦察对于机动目标的监视还不够高效,高分辨率的全球凝视卫星侦察现在还做不到,低轨道卫星又有侦察窗口和目标丢失问题,用核潜艇跟踪就是有效的办法。
近年来,中国海军崛起势头强劲,是否搞全核化水下舰队的问题上,中国海军却有自己的考虑,实际上走的是“核常并举”的道路——核潜艇要搞,这是水下舰队的高端部分(主要指核动力攻击型潜艇);但常规潜艇也不放弃,这是由中国特殊的情况决定的。
中国追求高质量常规潜艇的复杂考虑相比于核动力攻击型潜艇,常规潜艇的水下潜航速度较低,潜航时间较短,实际上比具有自航能力的水雷强不了太多,不适合大洋巡猎和追击,也跟不上舰队行动,难以用于舰队护航。
另外,常规潜艇的吨位也受到限制,难以携带大量武器,形成有意义的战略打击力量。
但常规潜艇也有其适用场合,其优势在于近海和浅海,适合打伏击,也适合搞封锁。
中国是世界上最大的陆海复合型国家,作战海区可以划分为东海与南海两大部分,也是我国进出太平洋和印度洋的主要通道。
这其中,东海藩屏着渤海经济圈、长江经济圈以及东北大部分核心区域。
水面舰艇编队与反潜巡逻机协同对潜搜索效能分析
水面舰艇编队与反潜巡逻机协同对潜搜索效能分析
杨秀庭;许林周;李军;张忆
【期刊名称】《指挥控制与仿真》
【年(卷),期】2017(039)002
【摘要】针对水面舰艇编队与反潜巡逻机协同对潜搜索问题,选取搜索效率作为效能指标,分析了水面舰艇编队与反潜巡逻机对任务海区实施检查搜索时的协同搜索效能,并结合浅海水声环境复杂多变的特点,对良好、中等、恶劣等三种典型水文条件进行分析,结果表明:反潜巡逻机参与协同对潜搜索能够显著提高编队对潜搜索能力,且该明显改善对海洋水声环境的适应性.
【总页数】5页(P15-18,23)
【作者】杨秀庭;许林周;李军;张忆
【作者单位】海军大连舰艇学院,辽宁大连116018;海军大连舰艇学院,辽宁大连116018;海军大连舰艇学院,辽宁大连116018;海军大连舰艇学院,辽宁大连116018
【正文语种】中文
【中图分类】TB56;E917
【相关文献】
1.基于搜索效能的水面舰艇编队搜潜对策研究 [J], 刘斌;陈建华;李微波
2.水面舰艇编队使用舰壳声纳对潜搜索效能分析 [J], 张永生;翁志刚;肖雪
3.水面舰艇编队使用拖曳线列阵声纳对潜搜索问题研究 [J], 丁红岩;董晓明
4.潜艇规避水面舰艇编队搜索的效能分析 [J], 张栋;丁义峰;宋裕农
5.水面舰艇编队对潜搜索效能评估模型 [J], 王义涛;马政伟
因版权原因,仅展示原文概要,查看原文内容请购买。
关于潜艇发展过程中对武器系统的技术需求研究

关于潜艇发展过程中对武器系统的技术需求研究
为了提高潜艇的生存能力和作战效能,武器系统的隐蔽性和自保能力也成为重点研究
的技术需求。
潜艇在水下行驶,需要保持较低的噪音和红外特征,以躲避敌方的侦察和追踪。
需要研发更加静音的潜艇动力系统和推进装置,以及有效的隐蔽措施,如水面遮蔽、
烟雾幕等,以提高潜艇的隐蔽性。
还需要研究自保能力,如反鱼雷系统、防空系统、自动
识别系统等,以提升潜艇在遭受袭击时的生存能力和反击能力。
潜艇在作战中还需要具备侦察、监视和情报收集的能力。
对于潜艇而言,识别海上目
标的能力尤为重要。
武器系统需要具备一定的侦察和监视能力,如水声传感器、声呐系统、电子侦察系统等,以及情报收集和处理系统。
这些系统可以提供给作战指挥人员准确的信息,使潜艇能够在更加复杂的作战环境中迅速识别敌方目标,并制定相应的打击计划。
潜艇还需要在水下保持长时间的自给能力。
武器系统需要考虑能源供应、弹药储备和
维修保障等问题。
研究潜艇武器系统的技术需求还涉及到能源管理、物资储备和维修保障
等方面的研究。
潜艇发展过程中对武器系统的技术需求研究涉及到多个方面,包括打击精度、隐蔽性
和自保能力、侦察与监视能力以及自给能力等。
通过不断研究和改进武器系统的相关技术,可以提高潜艇的作战能力和生存能力,在现代战争中发挥更大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 2期
四 川 兵 工 学 报
2 0 1 3年 2月
【 武器装备理论与技术 】
d o i : 1 0 . 1 1 8 0 9 / s c b g x b 2 0 1 3 . 0 2 . O 0 9
潜 艇 突 破 敌 水 面 舰 艇 反 潜 巡 逻 线 补 充 侦 查 分 析
Ana l y s i s o f S up p l e me n t a r y I n v e s t i g a t i o n f o r S ub ma r i ne s Br e a kt hr 0 ug h s f r o m An t i . s u bm a r i n e Pa t r o l Li n e
舰运动要素的准确掌 握 , 并根 据海 区水文条 件 , 敌舰声 纳有 效作用距离判断 , 准确进行 战术绘算 , 选择 有利突破点 、 突破 航 向和速度 , 利用 武器 、 水声 对抗 器材 和有利水 层完 成隐 蔽 突破 。而突破时若采 用情 报得 到的敌水 面舰艇 反潜 巡逻 线 的位置和敌舰运动要素往往存在一定 的误差 , 且潜艇本 身也 存在一定 的舰位误差 , 这样会 大大降低潜艇成 功突破敌巡 逻
沈士辉 , 张 会, 毛 钰
( 海军潜艇学 院, 青岛
2 6 6 0 4 2 )
摘要 : 基 于敌水 面舰艇不 同的反潜巡逻样式 , 系统地 给出 了补 充侦查搜 索 的两 种方法 , 并根 据情报 获得敌反 潜水面
舰 艇 的具 体 巡 逻 样 式 , 针 对 性 的提 出 了确 定 不 同巡 逻 线 样 式 的位 置 、 正面宽度 与纵深 、 敌舰速度等要 素的方法 , 并 对
s t y l e f r o m i n t e l l i g e nc e,t a r g e t e d t o d e t e r mi n e t h e l o c a t i o n o f t h e p a t r o l l i n e s t y l e,po s i t i v e e l e me n t s o f wi d t h a n d d e p t h,e n e my s p e e d a n d S O o n,mo d e l e d or f s u p p l e me n t a y r i n v e s t i g a t i o n or f s u b ma r i n e s b r e a k t h r o u g h s ro f m a n t i — s u b ma r i n e p a t r o l l i n e o f e n e my s u r f a c e s h i p,a n d in f a l l y v e r i i f e d t he f e a s i b i l i t y o f t h e me t ho d. Ke y wo r ds:s u b ma r i n e;a n t i - s u b ma r i ne p a t r o l l i n e;s u p p l e me n t a y r i n v e s t i g a t i o n
S HEN S h i — h u i ,ZHANG Hu i ,MAO Yu
( N a v y S u b m a r i n e A c a d e m y , Q i n g d a o 2 6 6 0 4 2 ,C h i n a )
Abs t r a c t:Ba s e d o n a n t i s u b ma r i ne pa t r o l s t y l e o f e n e my s u r f a c e s hi p s ,t h i s p a p e r g a v e t h e t wo wa y s f o r s u p p l e me nt a r y i n v e s t i g a t i o n s y s t e ma t i c a l l y, a n d a c c o r d i n g t o e n e my a n t i - s u b ma r i n e s u r f a c e s h i p s p a t r o l
巡 逻 样 式 选 择 。本 文 主 要 以 常 用 的 单 舰 往 返 和 双 舰 环 绕 巡 逻 样 式 为例 介 绍 敌 水 面舰 艇 反 潜 巡 逻 线 的 补 充 侦 查 过 程 , 并
往返 、 单舰环绕 、 双舰环绕以及“ 8 ” 字形搜索等样 式对某一海
域 进 行 封 锁 。 实 践 证 明 潜 艇 成 功 突 破 反 潜 水 面 舰 艇 巡 逻 线 的关 键 在 于 对 敌 水 面 舰 艇 反 潜 巡 逻 线 的 位 置 、 巡逻 样式 、 敌
潜 艇 突破 敌 水 面 舰 艇 反 潜 巡 逻 海 域 是 潜 艇 战 斗 航 渡 过 程 中遇 到 的挑 战 之 一 。 反 潜 水 面 舰 艇 封 锁 区 通 常 采 用 单 舰
1 舰 艇 巡 逻 线 样 式
根据不 同海域 、 不 同作 战需求敌 水面舰艇 反潜巡逻线设 置上主要有单舰往返 、 单舰 环绕 、 双舰环 绕 、 … 8’ 字形 搜索 等
潜艇突破敌水面舰艇反潜巡逻线 的补充侦查搜索方法建立数学模型分析 , 验证方法 的可行性 。 关键词 : 潜艇 ; 反潜巡逻线 ; 补充 侦查
中 图分 类 号 : T J 0 2 0 文献 标 识 码 : A 文章 编 号 : 1 0 0 6—0 7 0 7 ( 2 0 1 3 ) 0 2— 0 0 2 8— 0 4