视觉自动对位系统的讲义.共25页文档
机器视觉系统原理及基础知识通用课件

包括处理速度、帧率等,用于评估机器视觉系统在处理图像和视频 时的速度和效率。
鲁棒性指标
包括光照变化、遮挡、噪声等干扰因素对系统性能的影响,用于评 估机器视觉系统在实际应用中的稳定性和可靠性。
不同场景下性能评估方法
实验室环境下性能评估
通过在标准数据集上进行测试和比较,评估机器视觉系统的基本性能和算法优劣。
量,提取关键信息。
特征提取与描述
02
通过手工设计特征提取算法,如SIFT、SURF等,对图像进行特
征提取和描述,为后续分类和识别提供基础。
分类与识别
03
利用分类器如SVM、K-means等对提取的特征进行分类和识别
,实现图像内容的理解和应用。
深度学习在机器视觉中应用
01
卷积神经网络(CNN)
通过构建深度卷积神经网络,自动学习图像中的特征表达,提高图像分
触发方式
软件触发、硬件触发等,应根据实际应用场景进 行选择。
04
机器视觉系统软件平台介绍
常见软件平台对比分析
OpenCV
开源计算机视觉库,提供丰富的图像处理与计算机视觉功能,支 持多种编程语言。
Halcon
商业机器视觉软件,提供强大的图像处理和机器视觉算法库,易于 集成到工业应用中。
VisionPro
学术社区
推荐了几个重要的机器视觉学术社区和论坛,如CVPR、 ECCV等会议以及GitHub等代码分享平台,便于研究者和 开发者交流与合作。
THANKS
感谢观看
案例:应用实例展示
图像处理实例
展示如何利用软件平台对图像进行预处理、特征提取、目标检测等操作。
机器视觉应用实例
展示如何结合具体的工业应用场景,利用软件平台实现自动化检测、识别、定 位等功能。
机器视觉系统讲课文档
第二节:照明方式的分类
在机器视觉系统中一般使用透射光和反射光。
反射光
透射光
相机
相机
光源
光源
产品
产品 光源
第五页,共44页。
第三节:光源的分类及比较
萤光灯 卤素灯+光纤导管
LED光源 其他(激光、紫外光等)
其中LED光源凭借其诸多的优点在现代机器视觉系统中得到越来越多的应用。
Camera Link
千兆网
第二十九页,共44页。
按像素排列方式划分
面阵摄像机
• 黑白摄像机 • 采用BAYER转化的单片相机 • 3CCD彩色摄像机(分光棱镜)
线阵摄像机
• 黑白摄像机 • 3Line彩色摄像机 • 3CCD彩色摄像机(分光棱镜)
第三十页,共44页。
3CCD 彩色相机
第三十一页,共44页。
5.机器视觉镜头的畸变率要符合测量标准。直线在经过透镜 成像后会变成弯曲的现象,这就是畸变,畸变主要有两 种,分别为桶形畸变和枕形畸变。畸变的存在是具有普 遍性的,目前也没有能完全消除的手段,所以能将畸变 率控制在一个水平上就算是合格了。
第二十六页,共44页。
第三章、相机
第觉系统
第一页,共44页。
机器视觉系统详解
第二页,共44页。
机器视觉系统的构成
相机
镜头
光源
相机触发信号
I/O控制
光源触发信号
被测物
其他动作信号
供电及传输模拟图片信号
与软件通讯
其他机械部分
图像采集卡
数字图片信号
电
脑 系 统
第三页,共44页。
第一章、光源
第一节:光源简介
机器视觉基本原理演示文稿
第4章 工业摄像机
第39页,共53页。
4. 工业摄像机
按不同芯片类型划分: CCD摄像机,CCD称为电荷耦合器件,CCD实际上
只是一个把从图像半导体中出来的电子有组织地储存 起来的方法。 CMOS摄像机,CMOS称为“互补金属氧化物半导 体”,CMOS实际上只是将晶体管放在硅块上的技 术,没有更多的含义。CMOS可以将光敏元件、放 大器、A/D转换器、存储器、数字信号处理器和计 算机接口控制电路集成在一块硅片上,具有结构简 单、处理功能多、速度快、耗电低、成本低等特点。
2. 照明光源-主要参数
寿命。光源的半衰期要长,且在半衰期内, 光谱稳定,亮度衰减小。
发热特性。光源的工作温度要低,避免高 温损坏被检测物。
信噪比高,抗干扰能力强。 闪烁频率,交流、直流。 外形尺寸,便于安装。
第21页,共53页。
2. 照明光源-分类
按照射方式可分为四大类: 背向照明 前向照明 结构光 频闪照明。
各种照明方式:平面照明、环形光源、同 轴光源、平行光源、点光源、低角度光源、 线光源、光栅;
第22页,共53页。
2. 照明光源-分类
热辐射光源 白炽灯、卤钨灯
气体放电光源
荧光灯、钠灯、氢灯、氙灯、金属卤化物灯、空心 阴极灯、汞灯、高压汞灯、超高压汞灯
固体放电光源 发光二极管、空心阴极灯
激光器
气体激光器、固体激光器、半导体激光器、染料激 光器
第19页,共53页。
夏日阳光下 100000Lux 阴天室外 10000Lux 电视台演播室 1000Lux 距60W台灯60cm桌面 300Lux 室内日光灯 100Lux 黄昏室内 10Lux 20cm处烛光 10-15Lux 晴朗的月夜地面照度约0.2 lx
机器人视觉对位系课件9.8

产品设置界 面选项
获取设备坐标
④获取完成后点击<调整设备位置>进入设备控制界面关闭伺服,移动机械 手使标定纸位于相机图像中心后开启伺服,调整相机焦距和光圈使标定纸 可以清晰显示在图像中后固定焦距和光圈.
查看图象效果
⑤退出设备控制界面点击进入模板设置界面设置模板,设置模板完成点击确定.
⑥设置标定参数如粗标定移动距离,精标定点个数等都完成后点<执行标定>进 行自动标定.
搜索点位界 面 对象点产品 设置参数
搜索点位界 面 目标点产品 设置参数
3进入点位搜索界面后先点击<抓取图像>来显示实时图像,选择合适 的点位获取方式,搜索方式,精度等;点击<设置模板>选择合适的 模板范围后点击<点位搜索>自动搜索模板,搜索成功后取消勾选的 全图像搜索圈定合适的搜索范围,OK后点击确定则设置完成。 3点位搜索 4 取消全图象搜索 对象点产品设置图示:
环境设置 中的设备 参数界面
雅马哈参数读取界面
4.在软件《通讯参数》界面中点击使用串口通信,选择所 使用的端口即与YAMAHA控制器连接的COM口,保证通 信正常。 环境设置中的通讯参
数设定界面
COM口 选择
㈡进行标定步骤:
3标定固定相机:
①选定标定方法后在右侧选择标定相机,标定方式,点击<执行标定 >进入标定界面. ②点击<调整设备位置> 进入机械手调试界面,调整机械手位置和 固定相机焦距与光圈使吸头上的物料清晰的显示在界面右上角图像的 中央,保存机械手当前位置为固定相机拍照点,保存后退出界面. ③进入模板设置界面建立合适的模板,完成后点击确定保存退出. ④设置标定参数如X方向平移距离,Y方向平移距离等. ⑤设置完成后点击<开始自动标定>进行标定,第一次标定完成后记 录标定出的角度值,然后再次 点击 <开始自动标定>进行第二次标定 并记录标定出的角度值,与第一次的值进行比较如果差值小于1.0则 标定OK. ⑥点击关闭进入标定初始界面所选标定最后一行显示<标定有效>, 点击界面右下角确定标定完成. ⑦如果差值过大则需要重新标定。
最新双翌科技视觉对位系统分解教学讲义PPT

深圳市洛河科技有限公司
2021/3/16
支持主流控制接口 • 常用轴控卡 • PLC • MotionNet • HSL • SSCNET
微型控制单元 • 提供丰富的数据 接口,工业微型处 理器,节省空间 • 工业级标准 • 高性能处理内核 • 多种配置方案
12
提纲
为什么需要自动对位系统
双翌自动对位系统介绍
深圳市洛河科技有限公司
2021/3/16
23
谢 谢!
深圳市洛河科技有限公司
2021/3/16
24
小学语文阅读教学 教学设计相关问题的讨论
(一)
天津市小语会 杨志平
一、教学设计最大的困难是什么
1.进行教学设计的前提:有明确而恰当的教 学内容
2.教学设计的最大问题在于:教学内容不明 确
(1)教科书中文本的教学价值大多不明确 (2)课程标准的表述是宏观的
8
特点:相机安装灵活,适应复杂安装环境
支持相机安装方向可不一样
支持相机存在倾斜角度
支持相机有自身旋转角度
支持相机不同视野&工作距离
比較小 比較大 視野不一様
深圳市洛河科技有限公司
2021/3/16
9
特点:对位精度高、速度快
DEMO
项目 双翌
业界
对位 +/- 5um, 好:+/- 5um 精度 亚像素级 差:采用逐次
3.对策:通过文本解读,寻找教学内容
二、文本解读的着眼点在哪里
1.做好文本解读的首要条件是:明确解 读的着眼点 2.依据什么确定着眼点:课程的性质 3.怎样把握语文课程的性质:2011年版 “ 课标”
语文课程的性质
实验稿表述: 语文是最重要的交际工具,是人类文
视觉系统相关基础知识(最全版)PTT文档
4. 其他要求
精度要求与相机分辨率
• 象素值(X方向)= 视野范围(X方向)÷ CCD芯片象 素数量(X方向)
• 象素值(Y方向)= 视野范围(Y方向)÷ CCD芯片 象素数量(Y方向)
• 分辨率(X方向)=视野范围(X方向)÷ 理论象素值 (X方向)
• 分辨率(Y方向)=视野范围(Y方向)÷ 理论象素值 (Y方向)
视觉系统相关基础 知识
视觉系统硬件 的基本组成
镜头 灯源
待测目标
CCD相机
相机控制信号及电源
电脑系统
模拟图象信号
图象采集卡
灯源控制信号
数字图象信号
PCI地址总线
相机
1.相机选用简述 2.镜头选用简述
相机选用简述
输出信号#2(Result) 系统工作空间(工作距离)
1. 精度要求与相机分辨率
速度要求与相机成象速度及快门速度
通过(Pass)
视觉系统系统拍照时间=a;视觉系统系统运算时间=b+c;视觉系统系统等待设备命令时间=e;
他通讯方式
• RS232 • 网络接口通讯
(Ethernet)
感谢观看
分辨率(Y方向)=视野范围(Y方向)÷ 理论象素值(Y方向)
输入信号#1(SOT):设备将待测物放置在视觉系统的检测视野下,发出此信号通知系统可以开始检测。
2. 速度要求与相机成象速度 象素值(X方向)= 视野范围(X方向)÷ CCD芯片象素数量(X方向)
速度要求与相机成象速度及快门速度 (视觉系统=>控制中心)
例题计算
(控制中心=>视觉系统) 速度要求与相机成象速度及快门速度 (控制中心=>视觉系统) 与视觉板卡相匹配问题 输出信号#2(Result) 输入信号#1(SOT) (视觉系统=>控制中心)
视觉自动对位系统讲义
视觉自动对位系统讲义工程部:郑茂强2010/01讲义要点一.视觉自动对位系统构成二.视觉自动对位系统选型三.视觉自动对位系统应用视觉自动对位通过CCD将图像采集到图像对位处理系统,再通过图像对位处理软件,算出偏移位置和角度,再传送给外部运动制器,进行位置纠正.对位前对位后视觉自动对位流程:运动平台已经能正常运行,CCD安装并正常成像根本平台类型(XYQ,UVW…),设置平台参数,做模板,对位精度等自学习(Calibration),算出平台与CCD之间的关系.拍目标拍对像对位,自动算出偏移距离和角度(脉冲数)根据对位得出的偏移脉冲值控制平台运动相机与镜头FV -aligne r XPe/P 3-800UNT(显示器)(PLC)(FV-Aligner ENG)(对位主机)运动控制器(运动控制平台)滚动球/鼠标/键盘(触摸屏人机界面)光源,棱镜(FV-Aligner UNT 直接控制驱动器)对位主机:目前公司代理的对位系统有:松下:A210(手动对位)PV310(自动对位)(详细资料见:松下选型手册P26-P27)FAST:带轴卡-FV2300-ENG 不带轴卡-FV2300-UNT (旧型为FV1100)FV-AlignerII(对位软件)FV1100FV2300PV310A210松下对位系统:摄像机A摄像机B操作手柄PV310算出两台摄像机所拍摄的对位标记的补正量使用UVW方式/XYθ方式的平台,进行对位位置控制精度在1μm以上(需要高精度移动平台)松下对位软件:使用高精度平台,位置控制PLC进行全自动对位.适应在线生产或生产线自动化程度比较高的场合. [操作说明]松下对位软件:[松下对位介绍.ppt]FAST对位系统:FV-1100FV-2300FV-aligner系列是一款多功能,高精度的定位型图像处理装置。
进行定位时,在相机读取的图像信息的基础上,自动计算出定位所需的XYθ移动量,然后通过控制一个三轴平台(或者四轴平台)的移动,实现对工件进行XYθ校正,从而达到精确对位的目的。
视觉自动对准系统的设计
IC成型、分离和自动排管作为芯片封装的后工序,可以完成芯片封装后的成型、芯片分离和芯片排列入管。
成型、分离和自动排管系统的性能决定了生产IC的速度及产品质量等指标。
目前国内大多数芯片封装企业的成型、分离和自动排管系统的功能单一,速度一般在40一60次,min,噪声大、速度慢、精度也不高。
本设计采取光机电一体化技术及凸轮带动冲头传料片机构同步冲压机台设计方案,电脑控制CCD图像识别装置通过取像、找参考点、图像分析几个步骤来对产品方向性、引脚数及外型进行检测判断,设备具有噪声低、精度高、可靠性高、速度快等优点,芯片、封装、系统协同优化。
1系统总体结构整个系统由自动上料、导料和收料等几个部分组成。
CCD图像识别装置对产品方向性、脚数及外形进行检测判断。
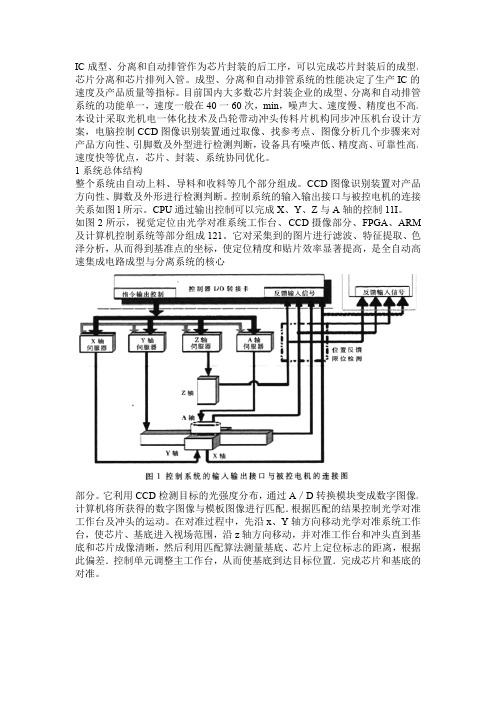
控制系统的输入输出接口与被控电机的连接关系如图l所示。
CPU通过输出控制可以完成X、Y、Z与A轴的控制11I。
如图2所示,视觉定位由光学对准系统工作台、CCD摄像部分、FPGA、ARM 及计算机控制系统等部分组成121。
它对采集到的图片进行滤波、特征提取、色泽分析,从而得到基准点的坐标,使定位精度和贴片效率显著提高,是全自动高速集成电路成型与分离系统的核心部分。
它利用CCD检测目标的光强度分布,通过A/D转换模块变成数字图像。
计算机将所获得的数字图像与模板图像进行匹配.根据匹配的结果控制光学对准工作台及冲头的运动。
在对准过程中,先沿x、Y轴方向移动光学对准系统工作台,使芯片、基底进入视场范围,沿z轴方向移动,并对准工作台和冲头直到基底和芯片成像清晰,然后利用匹配算法测量基底、芯片上定位标志的距离,根据此偏差.控制单元调整主工作台,从而使基底到达目标位置.完成芯片和基底的对准。
系统采用了一种数字相机模块,该模块采用130万像素摄像头,该摄像头的传感器是ov9650芯片。
摄像头通过SCCB(Serial Camera Control Bus)总线进行控制。
SCCB是双向、两线总线.具有总线仲裁机制。
机器视觉系统原理及基础知识PPT

本PPT将介绍机器视觉系统的概述、图像处理基础、图像分割与边缘检测、形 态学处理、特征提取与描述、相机标定与几何变换、目标跟踪、机器学习在 机器视觉中的应用等。
机器视觉系统概述
机器视觉系统是指通过计算机对图像进行处理、分析和理解,模拟人类视觉 系统的功能和能力,用于实现自动检测、识别、测量等任务。
特征提取与描述
特征提取是从图像中提取出具有代表性的特征,如颜色、纹理、形状等,特征描述是对这些特征进行数学建模 和描述,用于图像匹配和识别。
相机标定与几何变换
相机标定是确定摄像机的内部和外部参数,几何变换是通过变换矩阵对图像 进行旋转、平移、缩放等操作,用于图像校正和重建。
目标跟踪
目标跟踪是指在连续图像序列中跟踪特定的目标物体,如运动物体或行人, 用于视频监控、无人驾驶等应用。
图像处理基础
图像处理是指对图像进行数字化处理,包括图像采集、图像预处理、图像增强、图像压缩等,用于提取和改善 图像的特征和质量。
图像分割与边缘检测
图像分割是将图像分割成不同的区域,边缘检测是提取图像中的边缘线条, 用于目标检测和图像理解等应用。
形态学处理
形态学处理是一种基于图像形状和结构的图像处理技术,通过腐蚀、膨胀、开运算、闭运算等操作,用于图像 滤波和形状分析。
ห้องสมุดไป่ตู้
机器学习在机器视觉中的应用
机器学习是一种通过训练数据和统计方法来构建模型和预测的方法,应用于 图像分类、目标检测、人脸识别等机器视觉任务。
视觉自动对位系统的讲义.
02 13VBiblioteka P CUW
B
2.1 曝光機
紫外线灯
相 机
模板
平台
-流 程-
1.移动玻璃面板至平台
2.检出模板上的标志 3.自动定位 4.确认最终精度
5.用紫外线灯进行露光
6.排出玻璃面板
2.2 玻璃贴合机
玻璃面板Ⅱ
平台 相机
-流 程-
控制头
1.将玻璃面板Ⅱ上的标志移动到相 机视野内
2.检出并登录目标位置
二.视觉自动对位系统选型
对位用CCD相机 ① COG对位系统中因拍照视野范围约为3mm,所以用普通的30万像素
相机即可。 ② 相机拍照IC及玻璃进属于静止状态下拍照,通常用普通隔行扫描相
机即可。如: 松下:ANM832(包含相机电缆线)
Sentech:STC-E43A或STC-E42A (没有包含相机电缆线12W02)
二.视觉自动对位系统选型
目前常见对位平台:
XYθ平台 Xθ+Y平台
UVW平台
X
Y
1
2
Y 1
X 2
4軸平台
二.视觉自动对位系统选型
COG对位光学系统标准配置(参考表) 注:实际情况会有变化
名称
型号
1 远心镜头
MM6-ST65D
2 左侧视棱镜
MML-PSV16L
3 右侧视棱镜
MML-PSV16R
4 高亮度点光源
MLEK-A080W1LR MLEK-A080W2LR MLEK-A230W1LR MLEK-A230W2LR
MLEP-A035W1LR MLEP-A035W1LRD MLEP-A035W3LR MLEP-A035W3LRD
松下电工自动对位视觉系统使用手册
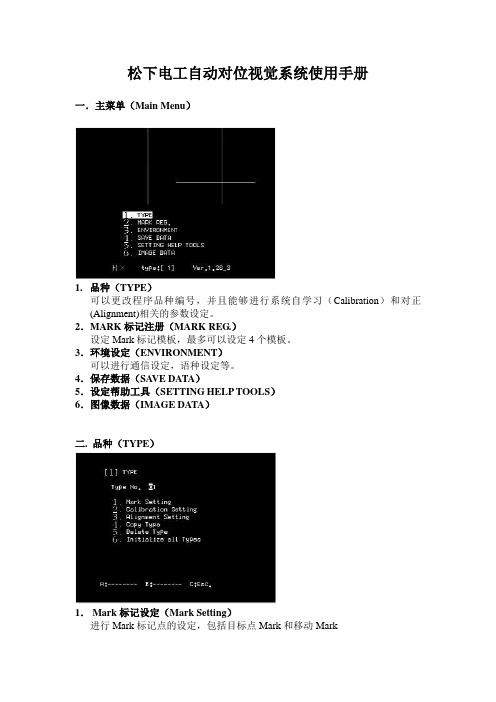
松下电工自动对位视觉系统使用手册一.主菜单(Main Menu)1.品种(TYPE)可以更改程序品种编号,并且能够进行系统自学习(Calibration)和对正(Alignment)相关的参数设定。
2.MARK标记注册(MARK REG.)设定Mark标记模板,最多可以设定4个模板。
3.环境设定(ENVIRONMENT)可以进行通信设定,语种设定等。
4.保存数据(SA VE DATA)5.设定帮助工具(SETTING HELP TOOLS)6.图像数据(IMAGE DATA)二. 品种(TYPE)1.Mark标记设定(Mark Setting)进行Mark标记点的设定,包括目标点Mark和移动Mark2.自学习设定(Calibration Setting)进行自学习过程的指定参数的设定。
3.自动对位设定(Alignment Setting)进行自动对位过程的指定参数的设定。
4.复制品种(Copy Type)5.删除品种(Delete Type)6.初始化所有品种(Initialize all Types)可以恢复本体到出厂时的设置,所有设定的参数和图像将全部丢失。
[1] Mark标记设定(Mark Setting)1.目标Mark点的指定(An applicable mark)A 摄像机(A Camera)对应3号Mark模板B 摄像机(B Camera)对应4号Mark模板2.移动Mark点的指定(Movement mark)A 摄像机(A Camera)对应1号Mark模板B 摄像机(B Camera)对应2号Mark模板3.自动对位的方式选择(Position Setting)对位到固定的屏幕中心点(Screen center fixation)对位到检测到的位置点(A position markdetection)[2] 自学习设定(Calibration Setting)1.自学习的移动量(The amount of movement)可以对X,Y,θ的指定移动距离和角度分别进行设定,距离的单位是mm, 角度的单位是度。
2D视觉系统基础讲座资料

-两种相机
线型相机(2048pix 1个)
3个面型相机(30万) = 一个线型相机(2K)
48
3.检测的基础
LED照明
-照明
LED光源优势:
1. 使用寿命长 2. 高频发光 3. 根据工件可选形状
专用照明控制器
49
3.检测的基础
LED照明
-照明
不理想…
理想!!
50
3.检测的基础 -照明
3种照明条件
51
3.检测的基础
-镜头
・CCTV镜头・・・适合用于一般的应用(高分辨率、低失真镜头) ・微距镜头・・・适合用于视野范围在3mm以下的高倍率应用。 ・远心镜头・・・适合用于精密尺寸的检测等。
CCTV镜头
微距镜头
远心镜头
CA-LHR/CA-LH系列
<同轴落射方式>
52
3.检测的基础
镜头选型
-镜头
1. 视野——拍摄范围 2. 工作距离(WD:Working Distance)——WD镜头到工件表面的距离
理论上需要的分辨率 = 0.1mm ÷ 5pix = 0.02mm/pix
X 方向必要像素 = 30mm ÷ 0.02mm/pix = 1500pix 30万像素 : 640pix(X方向)× 480pix(Y方向) 200万像素: 1600pix(X方向)× 1200pix(Y方向) 500万相似: 2432pix(X方向)× 2050pix(Y方向)
主要处理 4.输出
:拍摄到合焦点且对比度良好的图像 :数据的传送到控制器 :进行加工最适于处理的图像 :最适合于检测目的的方式进行处理 :从控制器输出所需要的信息/信号
41
3.检测的基础
-必知知识-