科尔摩根推出AKD高性能伺服驱动器
科尔摩根 AKM 2G 伺服电机 选型指南说明书

科尔摩根A K M®2G伺服电机选型指南克服设计、采购和时间障碍科尔摩根明白:帮助原始设备制造商的工程师克服障碍,可以显著提高其工作成效。
因而,我们主要通过如下三种方式来提供帮助:集成标准和定制产品在很多情况下,理想方案都不是一成不变的。
我们拥有专业应用知识,可以根据全面的产品组合来修改标准产品或开发全定制解决方案,从而为设计奠定良好的基础。
提供运动控制解决方案而不仅仅是部件在各公司减少供应商数量和工程人力的过程中,他们需要一家能够提供多种集成解决方案的全系统供应商。
科尔摩根就采用了全面响应模式,为客户提供全套解决方案,这些方案将编程软件、工程服务以及同类优秀的运动控制部件结合起来。
覆盖全球我们在美洲、欧洲、中东和亚洲拥有众多直销、工程支持单位、生产工厂以及分销商,临近全球各地的原始设备制造商。
这种便利优势可以加速我们的供货过程,根据客户需要随时随地供货。
财务和运营稳定性科尔摩根隶属于奥创公司。
奥创业务系统是推动奥创各部门发展的一个关键力量。
该系统采用“不断改善”(Kaizen)原理。
由高素质人才构成的多学科团队使用世界级的工具对过程进行评估,并制定相关计划以达到卓越的性能。
科尔摩根:您在运动控制领域的理想合作伙伴商标AKD是科尔摩根公司的商标。
AKM是科尔摩根公司的注册商标。
EnDat是Dr. Johannes Heidenhain公司的注册商标。
EtherCAT是由Beckhoff自动化公司授权的注册商标和专利技术。
Ethernet/IP是ODVA公司的注册商标。
Ethernet/IP通信栈:版权所有(c) 2009年,罗克韦尔自动化公司。
sercos是sercos国际公司的注册商标。
HIPERFACE是Max Stegmann公司的注册商标。
PROFINET是PROFIBUS和PROFINET国际公司(PI)的注册商标。
SIMATIC是西门子公司的注册商标。
SpeedTec是TE Connectivity公司的注册商标。
科尔摩根AKD2G伺服驱动器选型指南说明书

AKD 2G 伺服驱动器AKD 2G 是AKD伺服驱动器。
除了功率密度更大外,AKD2G 功能,因此更加简单易用。
AKD2G Servo on a Chip 计算引擎,该引擎可同时对2个轴和最多28个I/O进行控制。
在开发的过程中,我们为AKD2G A K D 2G 伺服驱动器A K D2 G伺服驱动器AKD 2G伺服驱动器AKD2G具有无可比拟的连接性基础型号科尔摩根AKD2G的基础型号拥有上文所述的所有性能,并且经优化可通过科尔摩根的Smart Feedback或HIPERFACE DSL与单连接器电机连接。
该型号还可提供16个I/O、160x128像素图形显示器、移动式SD卡和各种运动总线选件。
扩展I/O型号扩展I/O型号基于基础型号进行了I/O扩展。
该型号配备有针对传统反馈或双环运行的15针D-sub;另外还配备额外的12个I/O,总计28个I/O。
这些型号的外形尺寸与基础型号相同。
SafeMotion监视器 (SMM)扩展I/O型号可选配SMM。
SMM可将某些I/O转换为“安全”I/O,并使驱动器能够与FsoE主机安全连接。
同样,这些型号的外形尺寸也与基础型号相同。
双轴AKD2G 480 Vac(图示带选配的反馈和I/O扩展)双轴AKD2G 240 Vac(图示带选配的SMM、反馈和I/O扩展)Safety overA K D 2G 驱动器的连接器布局图AKD2G 驱动器的连接器布局图全彩 (RGB) 背光器,160 x 128像素可选运动总线:»EtherCAT»FSoE »CANopen 接地同时还安装了屏蔽装置交流电源(输入和输出):120/240 Vac, 240/480 Vac可选的反馈端口(15针 “D-sub”):»双环反馈 »传统反馈• 旋转变压器• A-QUAD-B • EnDAT • BiSS • sin/cos 等»EEO (编码器仿真)模拟输入模拟输出数字输入(灌电流),其中2路为高速型数字输出(拉电流)继电器输出,24V @ 2A 双通道STOI/O 扩展的驱动器提供: (I/O):I/O 扩展:前视图底视图针对单混合电缆接口进行了优化: »电机功率 »制动器 »反馈移动式存储器(标准SD 卡)第二电机» » »24Vdc 逻辑电源输入*SMM = 可选的SafeMotion 监视器**I/O 数表示标准I/O 和扩展I/O 的总和安全地址设置(包含在SMM 选项中)安全选件 »安全制动器 »安全反馈带SMM*和I/O 扩展的驱动器提供:模拟输入模拟输出数字输入(灌电流),其中2路为高速型“开路”数字输出,作为无电势的输出对(灌电流/拉电流5V-24V ),高速型数字输出(拉电流)2 x RS485式可选输入或输出,5V 1 x 继电器输出,24V @ 2A 1 x 单通道或双通道STO2 x 模拟输入2 x 模拟输出8 x 数字输入(灌电流),其中2路为高速型4 x “安全”数字输入(灌电流,)可配置为“常规”输入或2 x “开路”数字输出(灌电流/拉电流5V-24V ),高速型2 x 数字输出(拉电流)4 x “安全”输出(拉电流)2 x RS485式可选输入或输出,5V ,高速型1 x 继电器输出,24V @ 2A 1 x 单通道或双通道STO型号名称A* 当前尚不提供12 A 的双轴驱动器。
罗克韦尔自动化发布新版软件

电 藿嗣 园
单的转矩和速度应用 、分度 ,以及通过公司强大的新 型 自 动化
解 决方案 —撇 摩根 自动化组件实现 多轴可编程运动 。
功 能的 广度和 深 度使 A D成 为理 想 的高 性能 驱动 器 解 K
决方案 ,适 用于包 装 、传送 、印刷 、食品和饮料 、材 料成型 、 太阳能和医疗等多种行业 。
和房地产 行业的理想之选 。
] 53
能现 已能够 支持真 正的 “ 例外情况检查 ” 。
采用 P a ut 21 hr S i .,用户可以 实时检查 并处理在批 次 ma e 记 录过程 中出现 的例 外情 况 ,这 完全改变 了传 统的纸 质报表 或 “ 可视化 报表 ”在事后 进行处理 的状 况 。在线 批次记 录检 查 功能 ,允许质量控 制人员更高效地对记 录的偏差进行判 断 , 并更快地完成检查流程 ,从而将过程偏 差控 制到更 少。 新 E R 功能 旨在减 少批次 完成后 用于批次检 查 的时间 , B 这意味着成品在仓库等待检查放行 的时间明显缩短 。
今 年 , 科 尔 摩 根
在 亚 洲 推 出 了 全 新 的
Adva nce Kolm or n d l ge
Dr e ( K i A D) 高 性 v 网,可提供一流的性能和业内领 先的灵活 眭、可升级 性和 功率范 围,能够满足几乎所有应用的独特 性能要 求 ,从 简
物流技术与应用
2 1 年第1期 00 0
L 0Gt CS & MA STI TERI AL HANDL NG I
L ts e ae t ws 资 讯 N
新型 传 感器 应用 场合 非 常广 泛 ,包 装机 械 、食 品机 械 、 传输 带检 测 、送料盘控制检测 。
科尔摩根推出可编程多轴控制驱动器AKD

科尔摩根推出可编程多轴控制驱动器AKD PDMM
佚名
【期刊名称】《工业设计》
【年(卷),期】2012(000)009
【摘要】2012年9月,科尔摩根推出了AKD PDMM可编程多轴控制驱动器。
AKD PDMM将高性能多轴运动控制器、完整的IEC61131-3软PLC、EtherCAT主站与AKD伺服驱动器整合为一个单一的紧凑型装置,可帮助原始设备制造商(OEM)降低机器成本、将面板空间压缩50%或更多、简化接线和集成,同时提高系统灵活性、可扩展性和运动性能。
AKD PDMM的性能和功能完美适用于柔版印刷、包装、加工和医疗,以及其他需要多轴运动精确同步的自动化市场。
【总页数】1页(P15-15)
【正文语种】中文
【中图分类】TM383.6
【相关文献】
1.可编程多轴控制驱动器AKD@PDMM [J],
2.科尔摩根推出可编程多轴控制驱动器 [J],
3.科尔摩根科尔摩根AKD伺服驱动器 [J],
4.科尔摩根推出AKD^(TM) BASIC伺服驱动器 [J],
5.科尔摩根推出AKD高性能伺服驱动器 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
科尔摩根SC900伺服驱动器系列订购指南说明书

This is a Discontinued ProductContact Kollmorgen Customer Support at1-540-633-3545 or email us at if assistance is required.SC900 Servo Drive Family InformationAn SC900 all digital brushless servo can be ordered with or without accessories, such as manuals and mating connectors. Please check your shipment against the following ordering guide to verify you have received what was ordered. If an item is missing or additional accessories are required, please call 815-226-2222 to speak with a Customer Support Representative.ORDER NUMBER CODESC9 0 3 N N - 001 - 01Servo Drive Family DesignationOption Card Designator0 = No option card installed3 = OC930-001-00 serial port option card installed4 = OC940-001-01 SERCOS interface option card installed5 = OC950-X0Y-01 Programmable option card installed(X, Y - See customization code)Power Level2 = 7.5 A peak, 3.75 A continuous at 25° C (77° F)3 = 15 A peak, 7.5 A continuous at 25° C (77° F)4 = 30 A peak, 15 A continuous at 25° C (77° F)5 = 60 A peak, 30 A continuous at 50° C (122° F)Firmware01 = Standard base servo softwareCustomization Code, Factory Assigned001 = Standard unitNote: The following customization codes are only valid when ordering an SC950:501 = Standard OC950 32Kx8 NV RAM, without PacLAN502 = Standard OC950 128Kx8 NV RAM, without PacLAN503 = Standard OC950 32Kx8 NV RAM, with PacLAN504 = Standard OC950 128Kx8 NV RAM, with PacLAN601 = Enhanced OC950 32Kx8 NV RAM, without PacLAN602 = Enhanced OC950 128Kx8 NV RAM, without PacLAN603 = Enhanced OC950 32Kx8 NV RAM, with PacLAN604 = Enhanced OC950 128Kx8 NV RAM, with PacLANFan Kit OptionN = No fan, convection cooled2 = 240 VAC fan, forced air cooled1 = 120 VAC fan, forced air cooledAccessories OptionN = No accessory kitA = Basic connector kit, manual(s)T = Terminal block adapter kit, manual(s)940s include CA940-TB950s include CA950-IOExample Order NumbersPackage Order # Model #s Included DescriptionSC933TN-001-01 SC903-001-01 15 A peak standard servo driveOC930-001-00 Serial port option cardCA903-TB TB adapter SC903 connector kitMA900 SC900 Family Hardware Reference ManualMA930 OC930 Hardware and Software Reference Manual930 Dialogue 3.5" floppySC904AN-001-01 SC904-001-01 30 A peak standard driveCA904 Basic SC904 connector kitMA900 SC900 Family Hardware Reference Manual SC932NN-001-01 SC902-001-01 7.5 A peak standard driveOC930-001-00 Serial port option cardSC954NN-503-01 SC904-001-01 30 A peak standard driveOC950-503-01 OC950 programmable option cardwith 32Kx8 NV RAM and PacLANSCE900 ACCESSORY ORDER NUMBERS Part Order Number CommentsOption CardsBlank panel Firmware upgrade Serial communicationsSERCOS interfaceProgrammable option card OC900-001OC900-002-01OC930-001-0xOC940-001-01OC9500x0y-01Blank panel to cover unused option card slotFirmware upgrade option cardAdds RS-232/485 serial communications(-00 standard, -01 firmware upgrade)Adds SERCOS interface capabilitywhere x determines standard or enhanced firmwarex = 5 for standard firmwarex = 6 for enhanced firmwarewhere y determines the amount of NV RAM and PacLANy = 1 for 32Kx8 NV RAM without PacLANy = 2 for 128 Kx8 NV RAM without PacLANy = 3 for 32 Kx8 NV RAM with PacLANy = 4 for 128 Kx8 NV RAM with PacLANConnector KitsCA90xCA90x=TBCA940-TBCA950-IO where x = power levelBase drive terminal block(s) and D connector matesBase drive terminal block(s) and D connector terminal block adapter matesOC940 J43 Terminal block adapterOC905 Industrial I/O Rack interface adapter boardFan Kitsfor SC9x2 for SC9x3/4 OF902-00xOF903-OOxAdds forced air cooling to SCE900 base drivewhere x = 1 for 120 VAC 60Hzwhere x = 2 for 240 VAC 50/60 HzManualsSC900 base drive OC930 option card OC940 option card OC950 option card MA900MA930MA940MA950-IDEHardware reference manual for SC900Hardware and software referernce manualHardware and software reference manualHardware and software reference manual – plus integrateddevelopment environment on 3.5" diskI/O Emulator BoxSC900 base I/O SC950 I/O IOEM-900IOEM-950Exercises SC900 J4 base drive I/OExercises OC950 J52 option card I/OWiring Diagram。
NI发布全新高性能伺服驱动器和电机

用 于 创 新 的 软 硬 件 平 台 包 括 P 、 o a t I Sn l XI C mp cR O、 ige -
B adRI 机 器 人 起 步 包 等 。基 于 这 些 平 台 , 实 现 了 与 o r O、 NI
3 O多 年 来 , 国 国 家 仪 器 公 司 ( ) 助 测 试 、 制 、 美 NI帮 控 设 计 领 域 的 工 程 师 与 科 学 家 解 决 了从 设 计 、 型 到 发 布 过 程 原
开 发 成 本 。如 今 , 为 遍 布 全 球 各 地 的 3 0 NI 00 0家 不 同 的 客 户 提 供 多 种 应 用 选 择 NI 部 设 于 美 国 德 克 萨 斯 州 的 总 奥 斯汀市 , 4 在 O个 国 家 中设 有 分 支 机 构 , 拥 有 5 0 名 共 0 0多
最 适 合 工 作 的 1 0家 公 司 之 一 。 0
NI 布 全 新 性 伺 服 驱 动 器 和 电机 发 高 能
基 于 E h r AT 技 术 , 供 分布 式运 动解 决 方 案 t eC 提
美 国 国 家 仪 器 有 限 公 司 ( t n lIsrme t, 称 Nai a n tu ns 简 o NI近 日推 出 全 新 AK 伺 服 驱 动 器 和 AKM 伺 服 电 机 。 ) D 工 程 师 和 科 学 家 可 以 轻 松 创 建 可 扩 展 的 分 布 式 运 动 控 制 系 统 。新 产 品 简 化 了 安 装 和 配 置 过 程 , 够 快 速 将 自定 义 能 动 拥 有 前 沿 技 术 和 尖 端 性 能 , 矩 回路 更 新 可 达 0 6 s 转 .7 ,
S I t n模 块更新 了交互 式配 置 , 具有 高水 平 的功 能 ot i Mo o 并
AKS250AC细分驱动器说明书

0前言步进电机具有价格低廉、易于实现精确的位置控制、无积累误差,并且与计算机连接方便等优点,步进电机作为一种将电脉冲信号转变为角位移或线位移的转换元件,在工业生产控制、汽车电子、精密仪器和数字设备等领域中,获得了广泛的应用。
步进电机细分驱动技术是一种可以显著改善步进电机综合使用性能的驱动控制技术。
AKS250AC细分驱动器采用美国高性能专用微步距电脑控制芯片,开放式微电脑可根据用户要求把控制功能设计到驱动器中,细分数可根据用户需求进行设计,组成最小控制系统。
CW250AC控制器适合驱动中小型的任何两相或四相混合式步进电机。
实践证明,步进电机细分驱动技术可以减小步进电机的步距角,增加控制的灵活性,提高电机运行的平稳性,电机运行精度高、噪声低、振动小、运行平稳。
1驱动器CW250AC性能(1)CW250AC特点电源电压:20~40VAC或24~60VDC;输入信号与TTL兼容;最大驱动电流5A/相;斩波频率>35 kHz;无CP脉冲电流自动减半;可驱动两相或四相混合式步进电机;光电隔离信号输入;双极性恒流斩波方式;细分数可选:1/2、1/4、1/8、1/16、1/32、1/64、1/128、1/256步,1/5、1/10、1/25、1/40、1/50、1/100、1/200步;驱动电流可由开关设定。
(2)CW250AC接线端子说明AC端为外接交流电源,电压<60V;CP+、CP-:步进脉冲输入端(上升沿有效,持续时间>10μs);A+,A-端为电机A相;B+,B-端为电机B相;CW+、CW-:该端子电平可改变电机运行方向;EN+、EN-:驱动器使能控制。
2CW250AC拨码选择(1)细分数由开关SW1、SW2、SW3、SW4选择(Switch:“ON”=0;“OFF”=1),见表1。
表1细分数选择(2)SW5、SW6、SW7使用SW5:1=双脉冲,0=单脉冲;SW6:NC;SW7:1=半流,0=全流。
科尔摩根盘式电机

科尔摩根盘式电机科尔摩根盘式电机(Coreless Disc Motor)是一种新型的电机结构,具有结构简单、体积小、重量轻、转速高等特点,广泛应用于无人机、摄像机、机器人等领域。
科尔摩根盘式电机的核心部件是由铁芯、定子和转子组成的。
与传统的电机相比,科尔摩根盘式电机的铁芯采用镀锌铁片制成,减少了铁芯的质量,提高了电机的效率和动态响应能力。
定子是由导线绕制成的线圈,通过电流产生磁场,与转子相互作用,产生转矩。
转子是由一根细长的铁芯制成,上面固定着一系列的磁铁,通过电流激励,产生磁场,与定子的磁场相互作用,驱动转子转动。
科尔摩根盘式电机的优点之一是结构简单,由于没有传统电机中的铁芯,所以减少了电机的重量和体积,使得电机更加紧凑轻便。
同时,盘式电机的转子是由一根细长的铁芯制成,减少了转子的惯性,使得电机的转速更高,响应更迅速。
这使得科尔摩根盘式电机在需要快速响应和高速运动的应用中有着独特的优势,比如在无人机的飞行控制系统中,盘式电机能够快速调整转速和方向,保持飞行器的稳定性。
科尔摩根盘式电机的另一个优点是功耗低,能效高。
由于盘式电机没有传统电机中的铁芯,减少了电机的磁导率损耗。
此外,盘式电机的定子线圈采用精细的绕制工艺,减少了电阻损耗。
这些特点使得科尔摩根盘式电机的功耗更低,效率更高,节约了能源,同时也减少了电机的发热量。
科尔摩根盘式电机在机器人领域也有着广泛的应用。
由于机器人要求动作灵活、响应迅速,盘式电机的高速转动和快速响应能力非常适合机器人的应用场景。
在机器人的关节和末端执行器中,盘式电机能够提供精确的运动控制,使得机器人能够完成复杂的任务,如抓取、装配、运输等。
除了以上应用领域,科尔摩根盘式电机还可以应用于摄像机的镜头控制、医疗器械的精细调节、汽车的电动助力转向等。
随着科技的不断发展,科尔摩根盘式电机的应用领域还将进一步扩展。
科尔摩根盘式电机作为一种新型的电机结构,具有结构简单、体积小、重量轻、转速高、功耗低等特点,在无人机、摄像机、机器人等领域有着广泛的应用前景。
莫迪维克通过科尔摩根技术实现了气动到电气的转换

莫迪维克通过科尔摩根技术实现了气动到电气的转换更安静、更高效、操控性更强:莫迪维克采用科尔摩根伺服技术在包装机行业,越来越多的公司开始选用电气伺服技术主要是为了取代以前通过气动系统来控制运动轴。
伺服技术提高了操控性并降低了噪音排放,这些系统还帮助我们加快了生产周期,莫迪维克公司首席技术官Guido Spix 在最近一次包装展中强调到。
该包装机公司采用科尔摩根公司的运动控制解决方案来减少能源消耗,提高整机效能,并加强包装过程的安全性。
从肉类储存到成品包装等均采用电气加工。
相较于传统的以气动驱动为主的提升设备,新的R2XX 对R5XX 系列机器采用电机-驱动器组合来拉伸和密封膜安全包装:除了机器和操作人员的安全外,对于莫迪维克而言,还包括安全的包装过程。
科尔摩根伺服技术拥有的出色的可追溯性和操控性帮助莫迪维克设计出更有效的拉伸膜包装密封工艺,并提高了食品的安全性。
该解决方案目前用于高性能拉伸膜包装机,专为中大型负载设计。
优化的电机-驱动器组合。
优化的电机-驱动器组合与大多数传统的气动驱动型提升设备相比,R2XX 对R5XX 系列机器采用电机-驱动器组合来拉伸和密封膜。
这些设备利用杠杆原理提升成型模具有的重达几百公斤。
它们可承受20 吨的高的连接压力,确保两个膜密封牢固。
作为莫迪维克在运动控制方面的战略合作伙伴,科尔摩根采用AKM®伺服电机和圆形驱动器组成的紧凑装置来提升轴(kollmorgen/en-gb/products/motors/servo/servo-motors/)。
科尔摩根与莫迪维克的工程开发团队密切合作,计算并选择了最佳的电机尺寸和驱动模式。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
Kollmorgen AKD系列电机驱动器安装指南说明书

P .O. Box 9070, Fort Wayne, IN 46899For additional technical assistance, call or visit our website:PHD, Inc. makes no warranty as to the fitness of its products for a specific application. In no event shall PHD, Inc. be liable for loss of profits, indirect, consequential, or incidental damages arising out of the use of PHD Products.PURPOSE OF THIS DOCUMENTThis document is intended to supplement the applicable Kollmorgen ®AKD ®series motor drive User Guide and Safety Guide . It provides details to assist with commissioning a Kollmorgen ® AKD ® motor drive using Kollmorgen ® WorkBench interface software. Emphasis is placed on configuring the drive to enhance the operational safety of the gripping system. Note: User Guides , Safety Guide , and WorkBench software can be downloaded from the Kollmorgen ® website.MOTOR PARAMETERSThe AKM33H-AN 92CA00 motor supplied with the M1095 gripper option incorporates a plug and play feature which allows the drive to automatically configure motor parameters when the motor is connected to the drive. Note: See the “Motor” section of the Kollmorgen ® User Guide for additional information. Below is an abbreviated list of motor performance parameters. Note: See Kollmorgen ® website for full listing of motor parameters.Rated Speed = 5500 rpm (w/ 320 VDC buss)Rated Torque = 2.27 Nm [20.09 in-lb] (@ rated speed w/ 320 VDC buss)Continuous Stall Torque = 2.87 Nm [25.40 in-lb] (w/ 100 °C rise)Torque Constant = 0.52 Nm / A rms [4.6 in-lb / A rms ]Weight = 3.36 kg [7.4 lb] (including motor brake)GRIPPING ZONE(S)Operating the drive in position mode provides a precise means of establishing one or more “gripping zones,” based on jaw travel position, with input torque and position following error limited to low values outside of the gripping zone(s). The establishment of gripping zones enhances the operational safety of the gripper system by limiting the grip force and increasing the positional fault sensitivity of the system to detect object collisions in those portions of the jaw travel where the gripper is not expected to encounter an object. Only within the relatively narrow confines of the gripping zone is the gripper allowed to exert full grip force. The gripping zone should bound the jaw travel position where the gripper is expected to grip the gripped part and be no longer in travel than is necessary to compensate for gripped part dimensional variations and tooling deflection. When gripping multiple parts of differing dimensions, establish a separate gripping zone for each anticipated gripping position. Note: To place the controller in position mode, set the “Operations Mode” to “2 - Position” on the “Settings” screen. See the “Settings” section of the Kollmorgen ® User Guide for additional information.JAW TRAVEL MAPPINGThe “Units” screen allows the position of the jaws to be easily mapped to the rotation of the motor so that jaw position, velocity, and acceleration values can be subsequently specified relative to jaw travel, instead of motor revolutions. See figure 1.(1) Set “Type of Mechanics” to “Motor Only”.(2) Set “Position Unit,” “Velocity Unit,” and “Acceleration Unit” to “3 - Custom…”.(3) I n the “Custom” section, enter “8512 mm = 1000 rev” to establish that each motor revolution advances the total jaw travel 8.512 mm. Note: A total jaw travel of 8.512 mm means that each jaw moves ½ of the total travel, or 4.256 mm.POSITION REFERENCEPositive rotation of the M1095 option motor causes the jaws to move towards oneanother (close) while negative motor rotation moves the jaws apart (open). A convenient frame of reference for jaw position is to assign a value of zero to the position of the jaws in the fully opened position so that positive (clockwise) rotation of the motor will cause the measured position of the jaws to increase while negative rotation will decrease the measured jaw position.INPUT – OUTPUT CONFIGURATIONThe input - output configuration of the drive allows the position of the jaws, as reported by the motor feedback device, to control the allowable grip force and positional fault sensitivity of the system. The I/O configuration is established on the “General Purpose I/O’s” tab of the “Digital I/O” screen. Figure 2 illustrates an example configuration. In addition to a “homing” function assigned to Digital Input 1 (DIN 1), “jog open” and “jog closed” functions have been assigned to DIN 5 and DIN 6, respectively, and “start motion” functions have been assigned to DIN 3, DIN 4, and DIN7. Digital Output 1 (DOUT 1) is used to establish the gripping zone(s) via the Programmable Limit Switch (PLS) function of the drive and DIN 2 is used to toggle a command buffer which contains the commands to raise and lower the maximum motor torque and allowed position error in response to the output (DOUT 1) from the programmable limit switches.Refer to figures on pages 3 to 5.To configure the input and the gripping zone command buffer:(4) Set the “Mode” of the desired input to “9 - Command Buffer.”(5) Set the “Buffer” for the input to the desired buffer number.(6) Click the “Edit” button to open the buffer for editing.(7) F ollow the instructions in the “COMMAND BUFFER” section below to configure the buffer.To configure the output and the Programmable Limit Switches:(8) Set the “Mode” of the desired output to “15 - Prog. Limit Switch State.”(9) C lick on the “Goto PLS” link which will appear in the “Param” column to open the “Programmable Limit Switches” screen.(10) F ollow the instructions in the “PROGRAMMABLE LIMIT SWITCHES” sectionbelow to configure the switches.COMMAND BUFFERThe Command Buffer allows drive parameters to be changed using a digital input. Each digital input that is assigned to control a command buffer is linked to one command buffer set. Each buffer set is divided into a group of commands that are executed when the associated digital input changes to a “high” state and a second group ofcommands that are executed when the associated digital input changes to a “low” state. The PL.ERRFTHRESH command is used to define the allowed position following error (positional fault sensitivity) while the IL.LIMITP and IL.LIMITN commands define the positive and negative motor current limits, respectively. Figure 3 shows an example command buffer configured as follows:• High Command Buffer (executed when the jaws enter the gripping zone):(11) P L.ERRFTHRESH 10 sets the allowed position following error at 10 mm.Note: This value should equal the width of the gripping zone.(12) I L.LIMITP 6.41 limits the maximum current that the controller will apply to themotor to 6.41 A rms . Note: Do not exceed 7.39 A rms to prevent potential damage to the gripper.(13) I L.LIMITP -6.41 limits the maximum current that the controller will apply tothe motor to -6.41 A rms . Note: Do not exceed -7.39 A rms to prevent potential damage to the gripper.• Low Command Buffer (executed when the jaws exit the gripping zone):(14) P L.ERRFTHRESH 0.5 sets the allowed position following error at 0.5 mm.(15) I L.LIMITP 1.00 limits the maximum current that the controller will apply to themotor to 1.00 A rms . (16) I L.LIMITP -1.00 limits the maximum current that the controller will apply to themotor to -1.00 A rms .PROGRAMMABLE LIMIT SWITCHESProgrammable limit switches (PLS) are used to define the gripping zone(s). Up to eight individual gripping zones can be configured using the switches. Figure 4 provides an example showing the switches configured for two gripping zones, with one zone centered at a grip travel of 175 mm and a second zone centered at 250 mm. Each grip zone is 10 mm wide to accommodate gripped part dimensional variations and tooling flexure.Grip zone 1 = 170 mm to 180 mm (centered at 175 mm).Grip zone 2 = 245 mm to 255 mm (centered at 250 mm).(17) Check box to enable PLS1.(18) Set start position of PLS1 to desired value (e.g. 170 mm).(19) Set width of PLS1 to desired width (e.g. 10 mm).(20) Check box to enable PLS2 (if desired).(21) Set start position of PLS2 to desired value (e.g. 245 mm).(22) Set width of PLS2 to desired width (e.g. 10 mm).(23) Configure additional switches to create additional gripping zones, as desired.(24) C heck those boxes corresponding to the PLS’s desired active on the OR gatediagram. Note: To quickly deactivate a previously configured gripping zone, uncheck the associated PLS.Tip: The output of the OR gate can be used to confirm to a PLC or other external controller that the jaws are within the gripping zone(s). Tip: The second digital output (DOUT 2) can also be configured as a PLS. If desired, the output from DOUT 2 can be used to drive a second command buffer, configured with different allowed position following errors and positive and negative motor current limits for applications that require different limits for different gripping zones.SERIES EGRR M1095 MOTOR SYSTEM TIPS AND PRACTICESP .O. Box 9070, Fort Wayne, IN 46899For additional technical assistance, call or visit our website:HARDWARE JUMPERAn external jumper wire must be added between the applicable digital output (DOUT) pin controlled by the PLS and the digital input (DIN) pin controlling the gripping zonecommand buffer in order for the output and input to communicate with one another. Figure 5 shows an example of a jumper wire added between pin 7 of I/O connector X7 (DOUT 1+) and pin 9 of connector X7 (DIN 2) to affect the communication path.MOTION TASKSFigure 6 illustrates three sets of motion tasks as shown on the “MOTION TASKS” screen. The first set (tasks 1 & 2) is associated with a gripping zone 10 mm wide, centered at a total jaw travel position of 175 mm. The second set (tasks 4 & 5) is associated with a gripping zone 10 mm wide, centered at a total jaw travel position of 250 mm. The last task (task 7) moves the jaws in the open direction to travel position of 10 mm. In this example, gripping is accomplished by executing either sequential tasks 1 & 2 or tasks 4 & 5, to close the jaws to end of the respective gripping zone. Task 7 would then be executed to open the jaws. Each set of sequential gripping tasks consists of a rapid traverse of the jaws in the close (positive) direction until the jaws reach a position 31 mm prior to the beginning of the applicable gripping zone. At this position, the jaws are decelerated at 1 G (9810 mm/s 2) to a final gripping velocity of 50 mm/s before the jaws enter the 10 mm wide gripping zone. Figure 7 shows the detail page for Task 1 (accessed by double-clicking on line 1 on the “MOTION TASKS” screen). To link the rapid traverse motion (e.g. task 1) to the gripping motion (e.g. task 2): (25) Check box to enable “Next Task”. (26) Enter line number of gripping motion task (e.g. “2”). (27) Check the “Blend” radio button. (28) S elect “Blend into Velocity” from the pulldown menu to specify that the jawssmoothly decelerate from the rapid traverse velocity to the gripping velocity.It is important to begin the deceleration of the jaws at a position that will allow adequate distance for the jaws to fully decelerate to the desired gripping velocity. The following equation can be used to calculate the required deceleration distance:Where: s = Deceleration distanceV r = Rapid traverse velocity V g = Gripping velocity a = DecelerationIn this example, for each of the gripping motion tasks: V r = 780 mm / s V g = 50 mm / s a = 1 G = 9810 mm / s 2Entering these values into the deceleration distance equation yields: s = 30.9 mm, therefore the position for the start of the jaw deceleration is chosen to be 31 mm prior to the beginning of each respective gripping zone.Having entered the gripping zone, the decelerated jaws can be expected to encounter the extremities of the object to be gripped and be brought to rest by contact with the object. Because the motion task is commanding the jaws to move to the end of the gripping zone, the drive will continue to deliver current to the stalled motor in an attempt to move the jaws to the end of the zone, even though the jaws have stopped against the gripped object. It is therefore crucial that for gripping to occur and be sustained, the motion task associated with gripping must command the jaws to move to a position beyond the anticipated grip position (typically to the end of the gripping zone). Note: The magnitude of the gripping force is controlled by the value of the IL.LIMITP parameter entered into the “Hi Command Buffer”, as previously discussed in the “COMMAND BUFFER” section. Tip: The position at which gripping is actually occurring, as reported by the position feedback device within the motor, can be easily determined by looking at the “Position Feedback” value listed at the bottom of the “Programmable Limit Switches” screen while the gripper is gripping. See figure 4. The applicable gripping zone can then be adjusted as desired, to re-center the gripping zone about the reported gripping position.OPERATING LIMITSThe “LIMITS” screen shows all of the drive limits for convenience on a single screen. See figure 8. (29) T he “Current Limits” are controlled by the values entered for IL.LIMITP andIL.LIMITN in the command buffer (See the “COMMAND BUFFER” section for additional information). As the buffer toggles between high and low states, the values displayed for the “Current Limits” will change accordingly. Tip: View the “Current Limits” at any time to determine if the gripper is allowed to exert full gripping force (i.e. the “Current Limits” match those specified in the High Command Buffer) or is restricted to lower grip force (i.e. the “Current Limits” match those specified in the Low Command Buffer). Note: Do not exceed ± 7.39 A rms to prevent potential damage to the gripper.(30) T he “Positive and Negative Speed Limits” are chosen so as not to exceed therunning speed of the motor. Note: Do not exceed ± 780 mm / s to prevent exceeding the 5500 rpm rated running speed of the motor. Tip: Jaw speed is equally divided between each jaw. A jaw speed of 780 mm / s means that each jaw moves at ½ of the total speed, or 390 mm / s.(31) T he “User Over-Speed Limit” should be keep as low as is practical for reliableoperation of the gripper. Too low of a value will typically result in an over-speed drive fault. If over-speed faults occur, progressively raise the over-speed limit and / or reduce the acceleration / deceleration and speed of the motion tasks.(32) T he “Overall Over-Speed Limit” is capped by internal motor parameters andshould not need to be adjusted.(33) T he “Maximum Position Error” is controlled by the value entered forPL.ERRFTHRESH in the command buffer (See the “COMMAND BUFFER”section for additional information). As the buffer toggles between high and low states, the value displayed will change accordingly.(34) T he “Position Limits” are typically set based on the method chosen to home thegripper. If the gripper is homed using a hard mechanical stop (such as allowing the jaws to travel until the jaws physically contact the end plates or center plate of the gripper) then the limits should be chosen to preclude the jaws from reaching the mechanical stops while the gripper is running. In the example shown, the jaws of a 350 mm travel EGRR were homed against the end plates of the gripper and the resulting home position set to 0 mm. Position limits are set to 5 mm and 345 mm respectively, to prevent each jaw from coming any closer than 2.5 mm to the end and center plates of the gripper.(35) S et the “Acceleration Limits” to prevent the acceleration / deceleration of thejaws from exceeding 1 G (9810 mm / s 2). Tip: Jaw acceleration is equally divided between each jaw. A jaw acceleration of 1 G means that each jaw experiences ½ of the total acceleration, or 0.5 G.V r 2 - V g 22as =P .O. Box 9070, Fort Wayne, IN 46899For additional technical assistance, call or visit our website:FIGURE 1 - Units screenFIGURE 2 - Digital Inputs and Outputs screenFIGURE 3 - Command Buffernumber 1 window11114131612152345896P .O. Box 9070, Fort Wayne, IN 46899For additional technical assistance, call or visit our website:FIGURE 4 - Programmable Limit Switches screenFIGURE 7 - Motion Task number 1 windowFIGURE 5 - External Jumper between PLS Output and Command Buffer Input1718192024252627282122P .O. Box 9070, Fort Wayne, IN 46899For additional technical assistance, call or visit our website:FIGURE 6 - Motion Tasks screenFIGURE 8 - Limits screen29303132333435。
科尔摩根AKD调试手册

科尔摩根A K D调试手册(总2
页)
-CAL-FENGHAI.-(YICAI)-Company One1
-CAL-本页仅作为文档封面,使用请直接删除
(PC单独与驱动器网线连接,不要通过PLC及交换机连接)
1:设置科尔摩根的IP地址: 192.168.0.90 (在驱动器上:S1设置为9,S2设定为0)
2:检测驱动器的连接线是否正确,如果正确,先给驱动器通DC24V电源,主电源先不通。
打开科尔摩根调试软件WORKBENCH并且连接上驱动器。
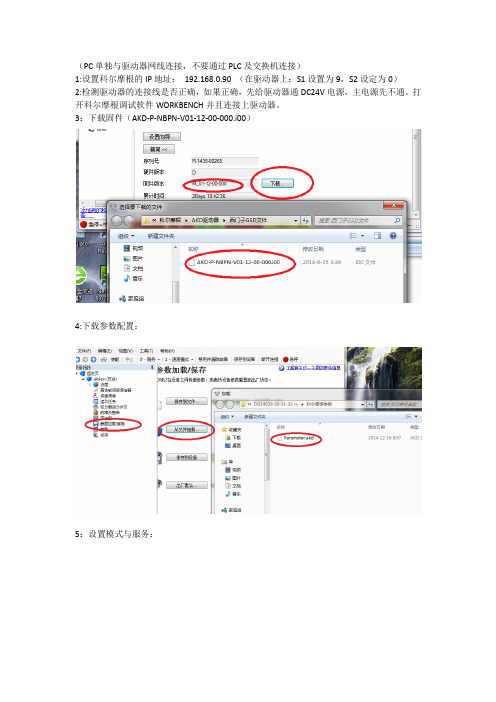
3:下载固件(AKD-P-NBPN-V01-12-00-000.i00)
4:下载参数配置:
5:设置模式与服务:
设置完成后请点击“保存到设备”进行保存。
6:接通主电源,维修模式调试小门。
(检查原点及定位信号)
7:在上位机的“进出料”菜单设置位置参数。
(进料位置,打开位置,关闭位置,极限位置),具体的方法:1:先回原点
2:维修模式进行位置定位,将上述每个位置进行记录,填写到上位机的参数设置中。
3:手动模式运行,看每个位置是否准备定位。
科尔摩根定位控制

科尔摩根定位控制
科尔摩根定位控制是指通过科尔摩根伺服驱动器实现精准定位的方法。
其具体步骤如下:
1. 设置伺服电机的内部转矩限制值。
2. 设置值是额定转矩的百分比。
3. 任何时候,这个限制都有效。
4. 设定位置控制方式下定位完成脉冲范围。
5. 本参数提供了位置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为ON,否则为OFF。
6. 在位置控制方式时,输出位置定位完成信号。
7. 设置值是表示电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。
8. 加减速特性是线性的。
380V 2kW 二代单轴驱动器硬体操作说明书 (SVD-32C1-020)

380V 2kW 二代单轴驱动器 硬体操作说明书(SVD-32C1-020)匯出日期:2023-10-19修改日期:2021-04-192023/10/19, 22:331 序言感谢您长期对本公司产品的使用与支持。
本公司伺服团队不断致力於各项产品的研发,期许本公司产品与服务能给使用者带来最大的效益。
新代高性能驱动器系列产品为本公司最新推出之伺服驱动器,本产品使用高品质之元件与材料,并经过严格测试,采用精密向量控制,具有高精确度、高稳定性、高效率之特性。
本使用说明内容包括驱动器的硬体规格、安装、配线与讯号,能提供给使用者最正确的指引与操作,为充分发挥产品应有的优异性能与维护人员及设备的安全,在使用前请详细阅读本使用手册,并且妥善保存,以备日後调校与保养时使用,若有任何疑虑,请与本公司联络,本公司专业人员将竭诚为您服务。
2 适用机型本单轴操作手册适用於新代 2kW 二代单轴驱动器。
3 硬体规格3.1 说明每部驱动器在出厂前均经过详细品管检查与防撞包装处理,请使用者收到产品後应先检查外观有无撞击损伤,并将外盒与产品上之序号做比对是否一致,若有不符,请第一时间与本公司联络。
型号说明3.2 外观介绍3.3 外形尺寸SVD-32C1-020驱动器规格新代驱动器SVD-32C1-020三相 380~440V 50/60Hz电源额定电源电压电源电压容-15 ~ +10%许范围电源频率变±5%动范围输出 额定输出电8.4A流过电流能力150% 60s、200% 1s控制方式 三相全波整流,SVPWM-VVVF控制新代驱动器SVD-32C1-020回生电阻 建议使用内建即可,如要外接,请参考回生电阻选用章节反馈编码器 支援串列介面:Tamagawa、SYNNET、NIKON、FeeDAT选配扩充编码器模组:支援Tamagawa、SYNNET、NIKON、ABZ、串列、BiSS (不支援UVW省配线型编码器)(若要使用扩充编码器模组,请参考伺服10PX1/10PX3扩充模组操作文件) PC通讯介面 USB控制器串列Mechatrolink III通讯介面输出入信号数位输入2点,可规划数位输出1点,可规划STO双通道安全扭矩停止开关(2I 1O)冷却方式 风扇冷却环境 温度0℃ ~ 55℃(若环境温度超过45℃以上时,请强制周边空气循环)、储存:-20~65℃ (非冻结)湿度最大90% RH (非结露)、储存:90%RH以下 (非结露)安装地点室内(避免阳光直射);无腐蚀性气体、易燃性气体、油雾或尘埃海拔1000公尺以下至海平面振动最大 5.9 m/s2重量 2.5 kg•••••••••••••••••••••4 搬运与安装4.1 搬运搬运时必须拿取驱动器的机身,不能只拿取上盖或其中部分,否则可能造成掉落的危险。
AKD伺服驱动器简介

可以嵌入我们先进的自动控制组件,形成高性能的科尔摩根自动控制组件利用紧密集成的运动控制能力)编程环境,AKD 可以与高质量、高可靠性和高性能的科尔摩根电机和线性定位器无缝协调工作K O L L M O R G E N | w w w.k o l l m o r g e n.c o m 咨询热线:400 666 1802 s a l e s.c h i n a @k o l l m o r g e n.c o m简单易用• 与科尔摩根电机兼容,可即插即用• 带有直观图标和屏幕流的图形用户界面 (GUI) 使得导航、设置和编程快速并且容易。
• 数字信号处理器控制支持可靠、可重复的步骤。
• 螺钉拧紧式 I/O 终端连接器可以快速、容易地 安装。
光隔离输入/输出降低了噪音,并且消 除了对于额外硬件的需求。
快速• 立即适应变化的负荷状态。
电流环在 0.67 微秒内更新。
速度和位置 环分别以 62.5 微秒和 125 微秒更新率引领市场。
• 通过点击具备自动调谐和基于向导的调 谐按钮,可以优化效率。
也可根据指导 进行手动调节。
• 采用与 PC 兼容的 TCP/IP 以太网服务通道 进行快速数据采集。
• 实时性能反馈灵活• 支持多种反馈装置—智能反馈装置 (SFD), EnDat2.2, 01, BiSS, Analog Sine/Cos 编码器、 增量式编码器、HIPERFACE ®, 以及旋转变压器。
• 额外的智能编程无须额外的硬件。
• 优化系统的多种总线选择,包括 EtherCAT ®, SynqNet ®, Modbus/TCP , 以及 CANopen ®.• 0.5 kW 至 64 kW 的通用接口和硬件• 符合 SIL 认证、过电压、电流和温度监测 提供更高的可靠性。
• 通过选项卡可以扩展输入输出,增加 NVRAM 和处理器能力可提供多轴控制功能。
强大的性能,轻松实现的灵活性,简单的集成AKD 具有强大的通信、功率和多功能性,可以增强机器性能并提高集成速度。
AKS230 高性能细分驱动器

混合式步进电机驱动,小体积,低震动AKS230高性能细分驱动器AKS230细分驱动器采用美国高性能专用微步距电脑控制芯片,细分数可根据用户需求专门设计,开放式微电脑可根据用户要求把控制功能设计到驱动器中,组成最小控制系统。
该控制器适合驱动中小型的任何两相或四相混合式步进电机。
由于采用新型的双极性恒流斩波技术,使电机运行精度高,振动小,噪声低,运行平稳。
特点☆电源电压24~40VDC单电压供电☆斩波频率大于35KHZ☆输入信号与TTL兼容☆无CP脉冲电流自动减半☆最大驱动电流3A/相☆可驱动两相或四相混合式步进电机☆双极性恒流斩波方式☆光电隔离信号输入☆细分数可选AKS-230型:2、4、8、16、32、64(或根据用户要求设计。
)☆驱动电流可由开关设定☆外型尺寸:115mm×72mm×32mm☆重量:0.3Kg1、引脚说明☆VCC+,GND端为外接直流电源,直流电压范围为+20V~+45V。
20~40VDC.注:切忌超过40V,以免损坏模块☆A+,A-端为电机A相☆B+,B-端为电机B相☆CP+、CP-:步进脉冲输入端(上升沿有效,持续时间>10μS)☆CW+、CW-:电机运转方向控制,通过控制该端子电平可改变电机运行方向☆REST+、REST-:急停复位3、电气特性(T=25℃)j☆输入电压+20V-+45V,典型值为+36V。
☆输出相电流0.9、1.2、1.5、1.8、2.1、2.4、2.7、3A。
☆信号逻辑输入电流10mA-25mA。
☆下降沿脉冲时间大于5us。
☆绝缘电阻大于500MΩ。
4、使用环境及参数☆冷却方式;自然冷却或强制风冷。
☆使用环境;尽量避免粉尘及腐蚀性气体。
☆温度;0°C-+50°C。
☆湿度;40-89%RH。
5、细分数和电流选择☆细分数由开关M1、M2、M3选择。
☆电流值由M5、M6、M7选择6、机械安装7、电源供给电源电压在DC15V──DC45V 之间都可以正常工作,本驱动器可采用稳压型直流电源供电,也可以采用变压器降压+桥式整流+电容滤波,电容可取大于2200μF。
科尔摩根的AKD_ BASIC伺服驱动器助您更快地制造更紧凑、更高效的机器

科尔摩根的AKD™ BASIC伺服驱动器助您更快地制造更紧凑、更高效的机器作者:来源:《工业设计》2012年第12期AKD® BASIC采取可编程的单轴机器和运动控制功能,可以帮助工程师快速完成在驱动器层面定制性能设计全球领先的运动控制提供与服务商科尔摩根公司推出了AKD™ BASIC伺服驱动器。
这些驱动器是基于以太网设计的,采用了一个集成的单轴运动控制器。
与驱动器和PLC分离的方案相比,此类驱动器可以帮助原始设备制造商生产结构更紧凑,效率更高的机器。
集成的运动控制器提供了凸轮、S 曲线和自由形式运动轮廓功能,另外还有BASIC 编程语言和带调试工具的内置程序编辑器,简化了用户操作。
因此,机器制造者可以更快地完成复杂的制造过程。
科尔摩根的产品经理Reid Hunt 说:“作为AKD 伺服驱动器系列产品,AKD BASIC 达到了机器制造商的预期要求,它们集成了便捷的单轴运动控制器,通过有效的方式用一个设备取代了两个设备。
AKD BASIC伺服驱动器为原始设备制造商提供了强大的工具,帮助他们对机器性能进行差异化,满足客户的独特需求,避免了因为供应商定制运动部件而花费的时间和成本。
”在驱动器中直接集成机器控制功能,设计工程师在设计机器的过程中,就可以不使用某些中小型PLC ,减少了连线、部件数量、以及专用面板空间。
这样一来,原始设备制造商就可以降低机器的成本和尺寸。
AKD BASIC 也很适合仍然需要采用多个接口的PLC ,其中包括数字I/O 以及以太网通信接口。
集成的高性能运动控制器可以帮助用户运行更复杂的动作,提高单轴应用的机器效率。
借助快速中断例程和条件式“when” 语句,可以确保快速执行程序,这对于同步运动和机器控制具有重要意义。
这些例程和“when” 语句每250微秒被扫描一次。
因为BASIC编程语言简单易懂,简化了程序流程控制,从而显著缩短了完成项目代码所需的时间,所以用户能够更快地操作和运行。
Kollmorgen(科尔摩根)电机及ServoStar驱动器、AKD伺服驱动器

Kollmorgen(科尔摩根)电机及ServoStar驱动器、AKD伺服驱动器业界领先的Kollmorgen伺服电机拥有着无与伦比的质量、高度的灵活性和卓越性能,使您能够选择最适合自身技术规范的最佳伺服电机。
这些电机运行平稳,具有极高的转矩输出和加速性能,可适合各种高性能应用。
Kollmorgen拥有一整套提供高级控制技术的驱动器产品线,所有驱动器都具有紧凑的外壳包装并且可以非常简单的进行试运行。
客户可以在在交流伺服、直流伺服、调速驱动、步进和OEM/客户定制驱动产品中自由选择,所有产品都具有宽泛的电源电压输入范围和功率范围。
Kollmorgen品牌涵盖了运动控制器、、伺服驱动器、伺服电机、直线电机,力矩电机等多种产品,其中伺服电机和伺服驱动器主要包括以下系列产品:Kollmorgen AKM伺服电机、Kollmorgen PLATINUM DDL直线电机、Kollmorgen GOLDLINE DDR直驱力矩伺服电机、Kollmorgen CARTRIDGE DDR直驱伺服电机、Kollmorgen GOLDLINE伺服电机、Kollmorgen GOLDLINE BH/MH系列伺服电机、Kollmorgen GOLDLINE B/M/EB(防爆)/BE/ME系列伺服电机Kollmorgen GOLDLINE XT系列MTXXX伺服电机、Kollmorgen DBL/DBK同步伺服电机、Kollmorgen Seidel同步伺服电机、Kollmorgen Bautz同步伺服电机、Kollmorgen F/FH无框力矩伺服电机、Kollmorgen RBE(H)无框力矩伺服电机、Kollmorgen BM(S)无框力矩伺服电机、Kollmorgen DDR直驱力矩电机、Kollmorgen 直驱无框力矩电机、Kollmorgen Inland直驱直流力矩电机、Kollmorgen ServoDisc有刷直流伺服电机、Kollmorgen Bautz Servo Linear Actuators、Kollmorgen SERVOSTAR CD伺服驱动器、Kollmorgen SERVOSTAR CD SynqNet伺服驱动器、Kollmorgen SERVOSTAR200(S200)伺服驱动器、Kollmorgen SERVOSTAR400(S400)伺服驱动器、Kollmorgen SERVOSTAR300(S300)伺服驱动器、Kollmorgen SERVOSTAR600(S600)伺服驱动器、Kollmorgen SERVOSTAR700(S700)伺服驱动器、Kollmorgen AKD伺服驱动器。
科尔摩根 模块化直接驱动旋转电机选型指南 带 AKD 系列伺服驱动系统说明书

科尔摩根模块化直接驱动旋转电机选型指南带有AKD系列伺服驱动系统科尔摩根:您在运动控制领域的最佳合作伙伴在设计每一个解决方案之前,我们都会深入了解机器设计者和用户所面临的困难。
目录◆ 直接驱动电机概述 4◆ 模块化直接驱动旋转® (DDR) 电机 6◆ 冲床给料设备应用 9◆ 系统概述 10 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 性能数据 12 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 外形图 28 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 安装要求 36 C(H)04x, C(H)05x, C(H)06x, C(H)09x, C(H)13x◆ 模块化DDR ®的连接器引脚分配 38◆ 模块化DDR ®到AKD 系列电缆 39◆ 模块化DDR ®的型号命名 40◆ AKD 系列伺服驱动器 42 AKD ®2G 伺服驱动器 AKD ®伺服驱动器◆ AKD 系列伺服驱动器的型号命名 52◆ 科尔摩根解决方案 55 自动化和运动控制 自助工具科尔摩根模块化直接驱动旋转电机选型指南克服设计、采购和时间障碍科尔摩根深知:如果能帮助原始设备制造商的工程师清除各种障碍,就可以显著提高其工作效率。
因而,我们主要通过如下三种方式来帮助他们:集成标准和定制化产品在很多情况下,最佳方案都不是一成不变的。
我们拥有专业应用知识,可以根据全面的产品组合来修改标准产品或开发完全定制化的解决方案,从而为设计奠定良好的 基础。
不仅提供部件,而且提供运动控制解决方案随着企业逐渐缩减供应商数量并精简工程设计团队,他们需要能提供广泛集成解决方案的全系统供应商。
科尔摩根可以提供完整的解决方案以及运动子系统,并将编程软件、工程设计服务以及一流的运动组件有机结合在一起。
最新科尔摩根AKD调试的手册打印版.doc
(PC单独与驱动器网线连接,不要通过PLC及交换机连接)1:设置科尔摩根的IP地址:192.168.0.90 (在驱动器上:S1设置为9,S2设定为0)2:检测驱动器的连接线是否正确,如果正确,先给驱动器通DC24V电源,主电源先不通。
打开科尔摩根调试软件WORKBENCH并且连接上驱动器。
3:下载固件(AKD-P-NBPN-V01-12-00-000.i00)4:下载参数配置:5:设置模式与服务:设置完成后请点击“保存到设备”进行保存。
6:接通主电源,维修模式调试小门。
(检查原点及定位信号)7:在上位机的“进出料”菜单设置位置参数。
(进料位置,打开位置,关闭位置,极限位置),具体的方法:1:先回原点2:维修模式进行位置定位,将上述每个位置进行记录,填写到上位机的参数设置中。
3:手动模式运行,看每个位置是否准备定位。
赠送以下资料新员工入职手册公司宗旨:为顾客创造价值,为员工提供机会,为社会做出贡献。
员工行为准则—基本行为规范1、自律守法,在代表公司的各项活动中,时刻维护公司荣誉和利益,严守机密;2、维护公司形象,自觉学习和遵守各项规章管理制度和规定;3、保持良好的人际关系,发扬团队精神;4、积极创新,努力进取,勇于吃苦;5、忠诚对待公司、同事、客户和合作伙伴;6、工作时积极认真,不传闲话,不打听同事隐私,不更得将同事隐私对外扩散。
员工行为准则—公司禁止行为公司禁止行为是每位员工职业操守底线,触犯者将受到包括辞退在内的相应处罚:1、抵触或违背本公司企业文化理念;2、利用工作之便谋取私利或收受红包;3、打听或泄露个人薪酬;4、泄露公司机密或发表不利于公司的言论;5、造谣中伤,妒贤嫉能。
人事管理制度—新员工入职程序你接收到录用通知后,应首先按照要求时间到人事部门报到并办理以下事宜:1、出示我们发放给你的邀请函(或邀约信息);2、出示你的学历证书、资历证书、身份证、外地员工暂住证、误工证等原件,提供彩色一寸照片一张;3、工作人员核实你的个人资料,并发给你《新员工入职手册》;4、签订《入职承诺书》、《劳动合同书》、《保密协议》等;5、填写相关表格,录入指纹,领取办公用品和资料;6、公司将统一安排时间进行新员工入职培训。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
罗 克韦尔 自动化发 布新版 软件
日前 ,罗克 韦尔 自动化 发 布 了 Fcoy l h r ut atrTa P amaS i k e
21 件 。Fcoy a hr ut .软 atrT l P amaS i k e应用现 已融 入了 电子批 记
录 【 B )功能 ,专门 为制药和 生物 医药 制造商 的需求量 身 ER 定 做。新 版本 的 P amaS i 秉 承了 创新 的传 统 ,扩 展 的功 hr ut e
能现 已能够 支持真 正的 “ 例外情况检查 ” 。
采用 P a ut 21 hr S i .,用户可以 实时检查 并处理在批 次 ma e 记 录过程 中出现 的例 外情 况 ,这 完全改变 了传 统的纸 质报表 或 “ 可视化 报表 ”在事后 进行处理 的状 况 。在线 批次记 录检 查 功能 ,允许质量控 制人员更高效地对记 录的偏差进行判 断 , 并更快地完成检查流程 ,从而将过程偏 差控 制到更 少。 新 E R 功能 旨在减 少批次 完成后 用于批次检 查 的时间 , B 这意味着成品在仓库等待检查放行 的时间明显缩短 。
物流技术与应用
2 1 年第1期 00 0
L 0Gt CS & MA STI TERI AL HANDL NG I
L ts e ae t ws 资 讯 N
新型 传 感器 应用 场合 非 常广 泛 ,包 装机 械 、食 品机 械 、 传输 带检 测 、送料盘控制检测 。
科尔摩根 推 出AK 高性 能伺服 驱动器 D
今 年 , 科 尔 摩 根
在 亚 洲 推 出 了 全 新 的
Adva nce Kolm o) 高 性 v
能伺服驱动器 。A D K T M
基于 以太 网,可提供一流的性能和业内领 先的灵活 眭、可升级 性和 功率范 围,能够满足几乎所有应用的独特 性能要 求 ,从 简
电 藿嗣 园
单的转矩和速度应用 、分度 ,以及通过公司强大的新 型 自 动化
解 决方案 —撇 摩根 自动化组件实现 多轴可编程运动 。
功 能的 广度和 深 度使 A D成 为理 想 的高 性能 驱动 器 解 K
决方案 ,适 用于包 装 、传送 、印刷 、食品和饮料 、材 料成型 、 太阳能和医疗等多种行业 。
和房地产 行业的理想之选 。
] 53
摩托 罗拉推 出新型商 用 双向对讲 机C 1 O P 2O
近 曰,摩 托 罗 拉 发 布 了针 对 中 国市 场 的 新 型 商用 双 向
对讲 机 CP 20 10 。这 款 商用 双 向对讲 机 凭借 丰 富 的功 能和 坚 固 、轻巧 、紧凑 、符合 人体 工程 学 的设计 ,以及免提 通话 等 增强 功 能 ,进 一步 提高 了 用户 的工 作效 率和 生 产力 。 同时 , CP 2 0配备了高容量锂 电池 ,并具 有优异的通话 质量 和强大 10 的抗 干扰 能力 ,是 轻工业 制造 、零售 、酒 店服 务 、物业 管理